Section quelconque
- Principe
- Calcul des caractéristiques géométriques à l’aide de MACR_CARA_POUTRE
- Calculs effectués
- Exemples d’utilisation : Rectangle plein (traité par le test SSLL107G)
Le moment géométrique polaire permet de calculer la rigidité en torsion des poutres à section circulaire (torsion de Saint Venant). Cette macro-commande permet de déterminer les caractéristiques d'une section de poutre à partir d'un maillage 2D de la section [U4.42.02]. Ces caractéristiques sont calculées dans le tableau pour l'ensemble du réseau et pour chaque groupe de mailles de la liste précisée par l'utilisateur (cas d'un réseau de poutres).
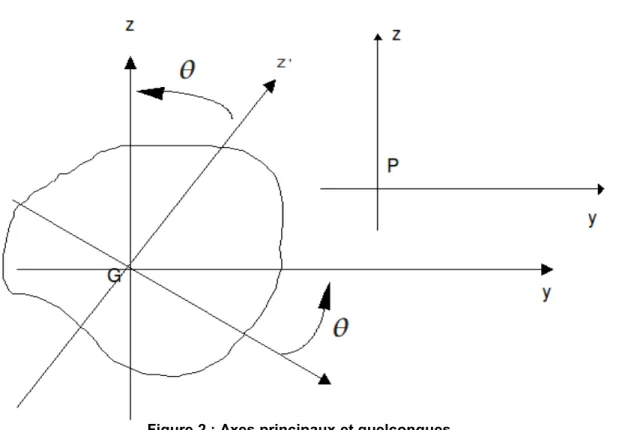
La donnée correspond à la moitié ou au quart de la section si les mots-clés SYME_Y ou SYME_Z sont présents. Dans le même repère global, pour le masque obtenu par symétrisation, si SYME_Y ou SYME_Z. Si l'on précise un point particulier P (mot-clé ORIG_INER), on calcule également les propriétés du repère global d'origine P : PYZ.
Cas particulier des sections rectangulaire et circulaire
Pour toutes sections, les coefficients de déplacement doivent être précisés par l'utilisateur dans AFFE_CARA_ELEM si l'élément sélectionné est une poutre TIMOSHENKO (modèles POU_D_T, POU_D_TG et POU_D_TGM). Pour les sections circulaires ou rectangulaires, les coefficients de déplacement sont calculés à l'aide des méthodes d'analyse du [§2.1]. Dans tous les cas, ils peuvent être calculés par MACR_CARA_POUTRE, à partir du maillage planaire de la section.
En annexe 2 nous décrivons une extension de cette méthode au cas d'un réseau de poutres parallèles maintenues entre deux planchers rigides. La position du centre de torsion (ou centre de cisaillement) est obtenue uniquement par des méthodes numériques (cf. [§2.3]). Pour les sections rectangulaires et circulaires, comme pour toutes les sections à 2 plans de symétrie, le centre de torsion coïncide avec le centre de gravité de la section.
Méthodes analytiques
- Hypothèse de répartition des cisaillements : formule de JOURAWSKI
- Méthode de TIMOSHENKO
- Méthode "énergétique"
- Méthode de COWPER
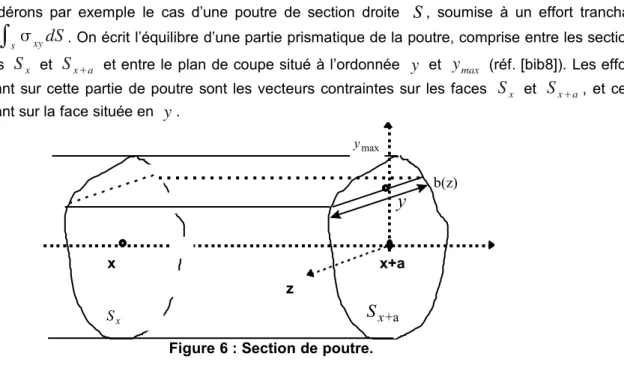
La grandeur m y représente le moment statique de la partie de la section (hachurée) comprise entre y et ymax. A l'origine, TIMOSHENKO (réf. [bib9]) a proposé une définition simple du coefficient de cisaillement, qui est le rapport de la contrainte de cisaillement transversal moyenne dans la section mentionnée. Pour cela, TIMOSHENKO fait une hypothèse sur la répartition des contraintes de cisaillement transversal : la contrainte de cisaillement transversal a une répartition parabolique dans le sens de l'effort de cisaillement qu'elle induit, avec une valeur maximale au centre et des valeurs nulles sur les bords.
La nouvelle définition du coefficient de cisaillement est parfois attribuée à MINDLIN et s'exprime par : UCT = 1. Par substitution, on définit donc le coefficient de cisaillement pour une section de matériau homogène par. L'approche qui permet d'arriver à la formule proposée consiste à considérer une répartition des contraintes qui n'est pas parabolique, mais qui résulte du problème statique (résolu analytiquement) de la poutre en porte-à-faux transversalement à son extrémité libre chargée.
Cas particulier des sections rectangulaire et circulaire
On peut également considérer des effets tridimensionnels pour déterminer le coefficient k ; diverses formulations ont été proposées, notamment par COWPER [bib3] et obtenues par BLEVINS [bib2], basées sur la solution du problème tridimensionnel de Saint-Venant. Dans ce cas, le coefficient k est fonction du coefficient de POISSON, généralement une approximation du premier ordre. Il est à noter que la répartition obtenue est strictement identique au problème d'une charge transversale uniformément répartie.
Le coefficient de cisaillement du tuyau circulaire à paroi mince est donné par la méthode COWPER, en prenant en compte que m = 1 et pour un coefficient de POISSON nul, donc ky = kz = 1. Pour les tuyaux circulaires à paroi épaisse, on utilise une formule de méthode approximative de. Si les choix précédents (faits par AFFE_CARA_ELEM dans le cas de sections circulaires et rectangulaires) ne conviennent pas, il est toujours possible de calculer numériquement les coefficients de cisaillement à l'aide de MACR_CARA_POUTRE, dont la méthode est précisée dans le § suivant.
Méthode numérique de calcul des coefficients de cisaillement et du centre de cisaillement
Calcul des coefficients de cisaillement
A noter que cette formule n'assure pas la continuité avec les cas limites du cylindre solide (. m=0) et du cylindre à paroi infiniment mince (m=1). Cette relation permet d'introduire la fonction de contrainte z pour que les contraintes de cisaillement dans la section s'écrivent. L'équation d'équilibre permet alors d'obtenir la fonction z en résolvant un problème quasi-harmonique, qui peut s'écrire.
En pratique, dans MACR_CARA_POUTRE, nous utilisons THER_LINEAIRE pour résoudre le problème, en assimilant z à la température. 2 ∫sG ∇ z2dS avec un calcul élémentaire pour tous les éléments de la section, avec l'option 'CARA_CISA' (calcul du gradient), puis la sommation sur ces éléments.
Calcul des coordonnées du centre de cisaillement
Exemple
Les composantes du vecteur CG= EY , EZ exprimées dans le repère principal G , y , z sont nulles : le centre de cisaillement/rotation se confond effectivement avec le centre de gravité.
Calcul des coefficients de cisaillement d’un réseau
La constante de torsion, notée JX, doit permettre de tenir compte de la torsion des sections droites (non circulaires) lors de la déformation en torsion. Dans les sections circulaires, les sections ne sont pas asymétriques et la constante de torsion est égale au moment géométrique polaire Ip. La constante de torsion C est définie comme le couple nécessaire pour produire une rotation de 1 radian par tour. longueur unitaire divisée par le module de cisaillement, c'est-à-dire
La détermination de JX dans le cas général se fait numériquement (MACR_CARA_POUTRE) et se réduit à un calcul laplacien en 2D. Une méthode originale de calcul des constantes de torsion avec des sections de trous est détaillée en annexe.
Calcul de C dans le cas des sections quelconques
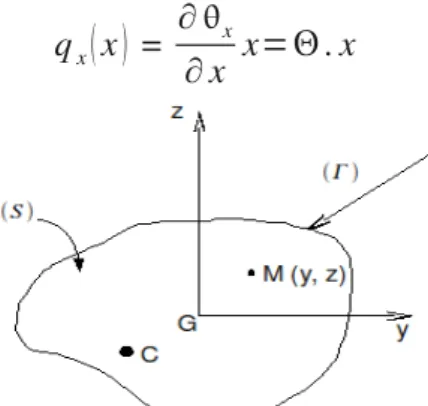
Si le point c est le centre de torsion (qui par définition reste immobile lorsque la poutre est soumise à une torsion), le champ de déplacement u M est donné par [bib1]. Cette écriture peut donc se mettre sous la forme n ∧ grad = 0, ce qui implique que les vecteurs n et grad j sont colinéaires. Celles-ci sont obtenues à partir de la circulation de la fonction de déformation sur chaque contour fermé.
Ces conditions se réduisent aux conditions classiques d'écoulement imposé (où l ∂ i représente la longueur de la frontière ∂ i).
Calcul de la constante de torsion dans MACR_CARA_POUTRE
Calcul du rayon de torsion dans une section quelconque
Le rayon de torsion dans MACR_CARA_POUTRE est déterminé uniquement par les commandes Python. Lors de l'exécution de MACR_CARA_POUTRE la commande POST_ELEM est appelée, donc un nouveau paramètre Rt est créé pour cette commande.
Constante de torsion des sections circulaire et rectangulaire
Le rayon de torsion efficace
La constante de déformation est utilisée par le modèle de poutre avec déformation (modélisations POU_D_TG et POU_D_TGM), qui doit être prise en compte pour les poutres à sections minces ouvertes (voir [R3.08.04]). Ce coefficient (noté Iw dans [R3.08.04], en m6) participe à l'expression du travail virtuel des efforts internes sur les termes de torsion. En suivant l'approche du [§3.1], et en se plaçant dans un référentiel lié au centre de torsion C, la cinématique de torsion de chaque section devient la même.
Par contre, sans charge extérieure sur le contour de la section, on doit avoir ⊗ n, qui peut s'écrire. Pour lever cette indétermination, on écrit par exemple l'expression de la force normale (pour une section où la torsion provoque un gauchissement). En pratique, dans MACR_CARA_POUTRE on se place principalement dans un point de référence lié au centre de torsion c.
Traduction des coordonnées des nœuds dans le repère associé au centre de torsion (préalablement calculé dans la table TCARS).
Détermination de la constante de torsion pour des sections a frontières multiplement connexes
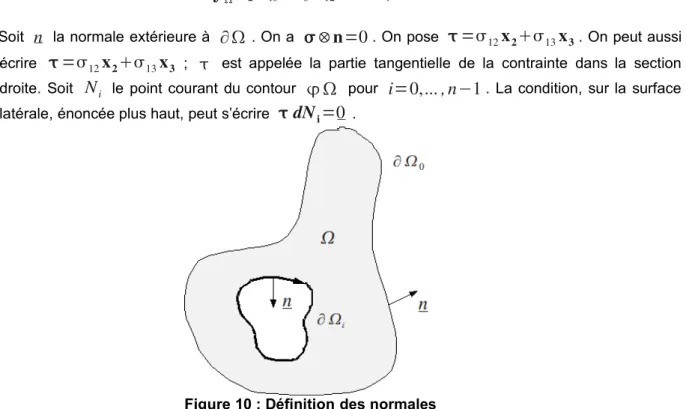
Compte tenu que nous avons affaire au problème de torsion libre, nous prendrons désormais 11 nul. Il nous reste à écrire les conditions aux limites, qui nous permettront d'écrire des conditions sur pour. On peut aussi écrire =12x213x3 ; est appelée partie tangentielle de la contrainte dans la section.
Ainsi, sur la surface latérale d'une poutre, le vecteur contrainte tangentielle est tangent au contour. Sachant que , et donc , est défini à une constante près, on peut fixer l'un des i. Réglage = grade ∧ x1 ; est (à une constante près) la partie tangentielle du vecteur limitée à la section efficace.
Nous avons utilisé ici le fait que la circulation du gradient dans une courbe fermée est nulle. On voit, avec cette nouvelle formulation, que le problème mathématique présenté se transforme en un problème thermique linéaire avec une charge particulière. On applique la méthode précédente à une poutre dont la section est la couronne entre les poutres R1 et R0 avec R1 R0.
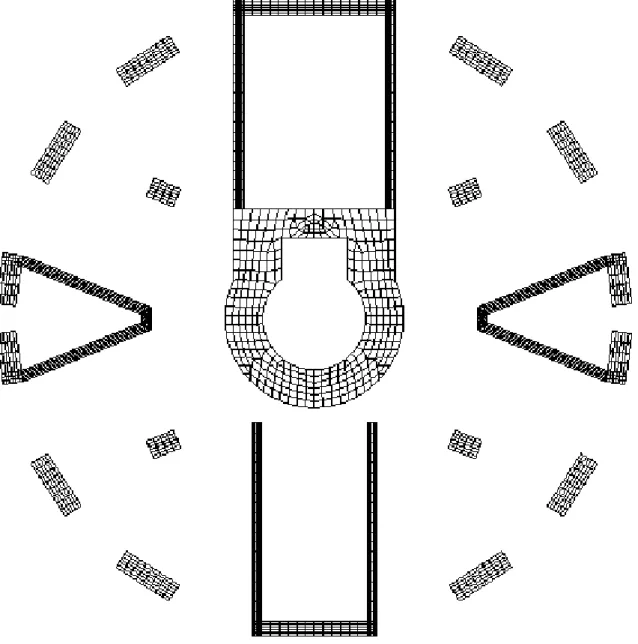
Détermination de la constante de cisaillement d’une poutre équivalente à un ensemble de
On ne peut pas connaître a priori la répartition des contraintes de cisaillement ou normales dans chaque colonne. Calculons ce cas particulier : chaque poteau est une poutre de section rectangulaire (les principaux axes d'inertie des différents poteaux ne sont pas colinéaires). On choisit f =1 et calculons successivement les déplacements dus à l'effort F et au couple en y= H.
En intégrant l'expression précédente, on constate que, sous l'influence de F, le déplacement réel u et la rotation ont les valeurs suivantes : u H = F. On retrouve également ce résultat en comparant la matrice de rigidité d'un élément d'une poutre considérer. Le terme ci-dessus correspond exactement au terme de rigidité au cisaillement uniquement dans la direction x.
On peut donc proposer d'exprimer la rigidité en cisaillement de chaque poteau sous la forme. La méthode consiste à calculer la rigidité de chaque poteau de la manière précédente, et à comparer la rigidité de l'ensemble avec celle d'une poutre équivalente encastrée entre deux planchers. Pour ce faire, nous exprimons la force de cisaillement globale appliquée à tous les pôles (par exemple, dans la direction y).
Pour chaque poteau ayant une orientation quelconque par rapport aux axes globaux, les forces Ti doivent au préalable être exprimées dans le référentiel global. Nous supposons en outre que le déplacement total u de toutes les colonnes est uniforme (de composantes ux et uy) et doit être colinéaire à l'effort tranchant T. ce qui n'est pas certain : des couplages sont possibles s'il n'y a pas de symétries particulières). En revanche, pour la poutre équivalente, nous faisons l'hypothèse que la rigidité en cisaillement s'exprime de la même manière que pour chaque poutre.
En fait, il faudrait vérifier que les énergies dues à la flexion et à la force normale sont bien négligeables.