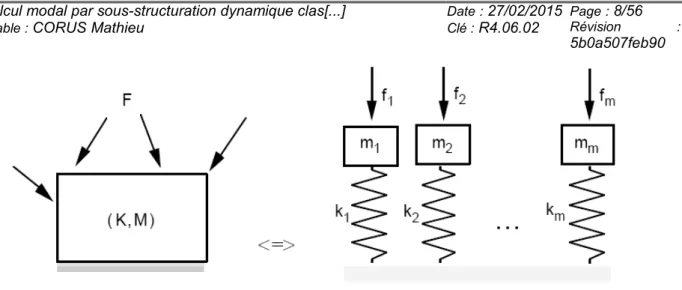
La sous-structuration dynamique consiste à déterminer le comportement d'une structure à partir des caractéristiques vibratoires de chacun de ses composants ([bib3] et [bib4]). Les méthodes implémentées dans Code_Aster utilisent simultanément les techniques classiques de recombinaison modale et de sous-structuration dynamique.
Transformation de RITZ
Le travail consiste à identifier des états purs et des déformations statiques à l'aide de techniques classiques de mécanique vibratoire. Après résolution du système [éq 2.1-3], les modes propres dans la base physique sont obtenus à l'aide de la relation [éq 2.1-2].
Recombinaison modale
La transformation de RITZ permet donc de remplacer le problème aux valeurs propres initial [éq 2.1-1] par un problème de même nature [éq 2.1-3], mais de dimensions réduites. Outre l'intérêt de réduire l'ordre du problème numérique à résoudre, la transformation du RITZ en base modale dans ce cas permet également la séparation des équations différentielles et la dérivation d'une interprétation physique du résultat obtenu.
Synthèse modale
- Les modes normaux
- Les déformées statiques
- Les déformées harmoniques
- Les déformées d’interface réduits ou « modes de couplage »
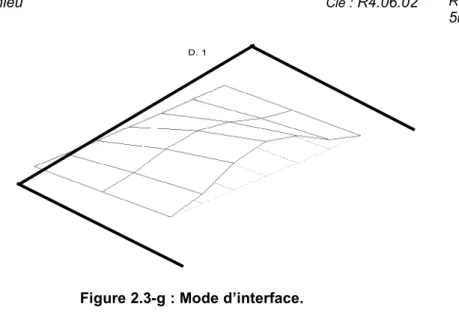
Nous définissons un mode d'interface pour chaque degré de liberté de connexion de chaque sous-structure. Nous définissons un mode d'interface pour tous les degrés de liberté de connexion de chaque sous-structure.
Conditions de liaison entre sous-structures
- Introduction
- Cas du maillage d’interface compatible
- Cas du maillage d’interface incompatible
- Conclusion
Par conséquent, nous définissons une interface « maître » sur laquelle nous projetons des nœuds d’interface « esclaves ». On définit e comme l'interface bornée à un élément et au nombre de ddl de l'élément.
Élimination des contraintes linéaires
Cas de contraintes linéairement indépendantes
La construction de cette base se fait simplement à partir de la décomposition QR de LT. Pour une matrice L de taille n× N, où n est le nombre de contraintes, et N le nombre de degrés de liberté, cette décomposition peut s'écrire.
Cas de contraintes redondantes
Pour identifier le rang nI de la matrice L, nous utilisons la matrice triangulaire supérieure R1 dérivée de celle-ci. En pratique, trouver nI dépend de la valeur définie comme seuil zéro numérique.
Cas d'un nombre important de contraintes
Après décomposition, les colonnes de Ql l associées aux termes diagonaux non nuls de Rl ŀ sont mises à zéro. Plusieurs choix existent pour la construction séquentielle de Lk, et consistent soit à extraire un nombre fixe de lignes de L pour chaque étape, soit à rechercher des blocs de contraintes disjointes dans L.
Introduction
Méthode de Craig-Bampton
Ces expressions montrent les projections des matrices de masse et de rigidité basées sur la sous-structure. Nous considérerons ensuite que ces modes sont normalisés par rapport à la matrice de masse. Le choix de la base de projection à interfaces bloquées conduit donc à un couplage des modes normaux et des déformations statiques à travers la matrice de masse.
Méthode de Mac Neal
Premier cas
Elle présente l’inconvénient de s’appuyer sur une méthode de recombinaison modale très sensible aux effets de troncature.
Deuxième cas
Considérons maintenant la matrice de flexibilité dynamique résiduelle dérivée de la méthode de Mac Neal. Notons enfin que dans la méthode de Mac Neal, seule la contribution des modes d'attachement aux nœuds d'interface est nécessaire. La méthode de Mac Neal aboutit donc à un problème de valeurs propres réduites dans le cas du calcul des états de la structure globale.
Méthode des modes d’interface (méthode dite réduite)
- Introduction
- Définition des modes d’interface
- Calcul des modes d'interfaces
- Création des macro-éléments réduits
Le calcul des modes propres de la structure globale condensés à leurs interfaces par des méthodes de sous-structuration dynamique consiste à résoudre le problème avec les valeurs propres matricielles suivantes. Pour chacune des sous-structures nous avons des bases de modes normaux et des bases de modes d'interface. La création des macroéléments est alors la même que dans la méthode Craig-Bampton.
Mise en œuvre dans Code_Aster
Étude des sous-structures séparément
L'opérateur DEFI_BASE_MODALE [U4.64.02] permet de calculer la base complète de la projection de la sous-structure. Si le type est "CRAIGB", on calcule les modes contraints des interfaces de la sous-structure. L'opérateur MACR_ELEM_DYNA [U4.65.01] calcule les matrices de rigidité et de masse généralisées de la sous-structure, ainsi que les matrices de liaison.
Assemblage
De plus, les déformations statiques sont calculées selon le type défini dans l'opérateur DEFI_INTERF_DYNA [U4.64.01]. Si le type est "MNEAL", on calcule les modes d'attachement des interfaces de la sous-structure. Si le type est "NONE", on ne calcule pas de déformation statique, ce qui correspond à une base de type Mac Neal sans correction statique.
Introduction
Équations dynamiques vérifiées par les sous-structures séparément
En supposant que les modes propres dynamiques et les déformations statiques sont organisés comme le montre la formule [éq 4.2-3] et en considérant que les vecteurs propres associés aux modes dynamiques sont normalisés par rapport à la masse modale unitaire, les matrices de masse et raideurs généralisées prennent la forme ce qui suit. Nous démontrons, dans le cas de la méthode Craig-Bampton, que les modes normaux et les modes contraints sont orthogonaux par rapport à la matrice de rigidité, dont les termes hors diagonale sont donc nuls.
Équations dynamiques vérifiées par la structure globale
Mise en œuvre dans Code_Aster
Étude des sous-structures séparément
Assemblage et résolution
Restitution sur base physique
Introduction
Équations dynamiques vérifiées par les sous-structures séparément
Nous avons vu que pour chaque sous-structure cet espace est composé de modes propres dynamiques et de déformations statiques. En supposant que les modes propres dynamiques et les déformations statiques sont organisés comme le montre la formule [éq 5.2-3] et en considérant que les vecteurs propres associés aux modes dynamiques sont normalisés par rapport à la masse modale unitaire, les matrices de masse et raideurs généralisées prennent le forme suivante. La matrice résultante est donc une diagonale incomplète (on ne sait pas associer l'amortissement proportionnel aux déformations statiques).
Équations dynamiques vérifiées par la structure globale
Mise en œuvre dans Code_Aster
Étude des sous-structures séparément
Assemblage et résolution
Restitution sur base physique
Conclusion
Introduction
Calcul transitoire par projection sur les bases des sous-structures
- Équations dynamiques vérifiées par les sous-structures séparément
- Équations dynamiques vérifiées par la structure globale
- Double dualisation des conditions aux limites
- Traitement de la matrice d'amortissement
- Traitement des conditions initiales
Pour rendre la matrice non singulière, il suffit de dualiser la condition de la dérivée seconde des équations de couplage en utilisant les mêmes multiplicateurs de Lagrange. On voit donc que traiter l'erreur numérique dans les équations de connexion conduit à changer la matrice d'amortissement du problème transitoire. Cette modification est tout à fait comparable à celle effectuée sur la matrice de masse.
Calcul transitoire sur une base modale globale calculée par sous-structuration
Calcul des modes propres de la structure complète par sous-structuration
Considérons une sous-structure Sk caractérisée par sa base de projection k constituée de modes normaux et de déformées statiques. Nous supposons qu'initialement la sous-structure Sk est soumise à un champ de déplacement ou de vitesse (cela ne change en rien l'affichage) noté q0k.
Équation dynamique vérifiée par la structure globale
Étude comparative des deux méthodes développées
La deuxième méthodologie consiste à effectuer un calcul transitoire sur la base modale de l'ensemble de la structure obtenue par sous-structuration. On sait que l'étape de calcul des modes propres de la structure peut être coûteuse en temps de calcul. En revanche, la base modale sur laquelle est calculée la réponse transitoire est généralement de dimensions plus petites que celle définie par les vecteurs propres des sous-structures (modes déformés propres et statiques).
Mise en œuvre dans Code_Aster
- Étude des sous-structures séparément
- Assemblage du modèle généralisé
- Calcul de la base modale de la structure complète et projection
- Résolution et restitution sur base physique
La base modale de la structure complète est calculée avec l'opérateur classique de Code_Aster : CALC_MODES [U4.52.02]. Les matrices généralisées de masse, de raideur et éventuellement d'amortissement sont projetées en fonction des modes propres de la structure avec l'opérateur PROJ_MATR_BASE [U4.63.12]. Les vecteurs généralisés correspondant aux charges externes sont projetés en fonction des modes propres de la structure avec l'opérateur PROJ_VECT_BASE [U4.63.13].
Conclusion
Cet opérateur effectue également la concaténation de ces vecteurs selon la numérotation issue de NUME_DDL_GENE [U4.65.03]. Dans le cas d'un calcul sur base modale de la structure complète calculée par sous-structuration, des opérations spécifiques doivent être réalisées, qui sont présentées au § 5.3. Le calcul de la réponse transitoire de l'ensemble de la structure est effectué par l'opérateur DYNA_TRAN_MODAL [U4.53.21].
Introduction
Problème classique et principe de la méthode
Le principe de sous-structuration statique va par exemple pour la matrice K de la condenser uniquement dans les degrés de liberté j des interfaces en corrigeant le terme initial Kjj d'un terme complémentaire appelé "complément de Schur" selon le principe de condensation appelé Guyan [ bavoir14]. K jj= Kjj− KijT Kii−1Kij=TK (7.2-1) Le calcul du nouveau terme K jj aboutit à une projection de la matrice K sur la base des modes statiques du " borné " type obtenu à partir de la réponse statique aux déplacements unitaires imposés à chaque degré de liberté j des interfaces. Condensation dans les degrés de liberté j des interfaces de la matrice de masse M et de.
Méthodes de condensation par base complète ou réduite
La méthode de calcul par base complète
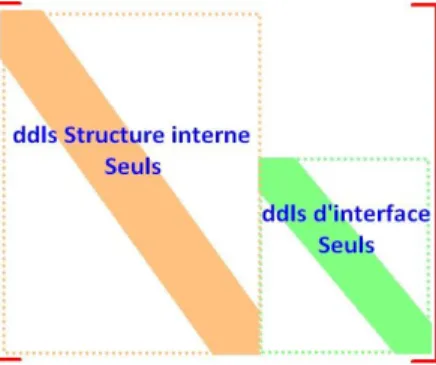
Au niveau assemblage d'un sous-domaine de type E1, la couche initiale représentée sur la figure 7.3.1-a comprend des expressions à la fois sur les degrés de liberté internes et sur les degrés de liberté d'interface avec un profil de remplissage incomplet. Après condensation avec la méthode complète, la plupart des degrés de liberté internes disparaissent, mais une très petite partie est réservée pour représenter les coordonnées généralisées associées aux modes propres, et les termes de macro-éléments statiques sont ajoutés aux degrés de liberté d'interface avec un profil complet Cette fois. La collection des termes du macroélément statique s'effectue par simple sommation sur les degrés de liberté de l'interface et ne nécessite généralement aucune connexion supplémentaire à l'interface lorsque l'on prend en compte tous les états statiques contraints de l'interface.
La méthode de calcul par réduction modale
Dans le cas d'un sous-domaine de type E3, le post-traitement par REST_COND_TRAN est inutile car le déplacement n'a aucune composante sur les modes dynamiques et le déplacement à l'interface est définitivement obtenu avec la solution du problème global. On notera qu'aucun choix de calcul n'est imposé pour la base de réduction des modes d'interface. Un choix possible serait celui utilisé en interaction sol-structure [bib15] en considérant une base de modes propres du sous-domaine de type E1 sur un tapis de ressorts représentant la rigidité des domaines adjacents de type E2 ou E3.
Cas général pour un calcul sur un modèle réduit
L'un des principes de validation de la qualité du modèle réduit consiste en une estimation a posteriori de l'écart à l'équilibre pouvant exister après le calcul.
Cas particulier du calcul des modes d'un modèle généralisé
Présentation
Lors d’un calcul avec sous-structuration utilisant des modes d’interface, il est important de pouvoir identifier plus précisément la source du calcul imprécis. La commande CALC_CORR_SSD [U4.52.16] permet, à partir des calculs du travail associé à ces différents efforts, de construire des expressions de correction permettant d'améliorer séparément le comportement de l'interface et le comportement dynamique interne de chacune des sous-structures. De plus, dans le processus d'enrichissement, il sera nécessaire de fournir une orthogonalisation séparée des vecteurs à interface fixe et des vecteurs à interface libre, comme cela a été fait dans le cas de test SDLS122 [V3.02.122], avant de les combiner et de construire les bases modales.
Calcul des indicateurs et corrections associées
- Définition du problème couplé
- Écart à l'équilibre
- Corrections associées aux efforts résiduels
- Corrections associées aux déplacement différentiels d'interfaces
Dans le cas où l'interface considérée est la principale, les déplacements de l'interface auxiliaire doivent être extrapolés. De plus, dans le processus d'enrichissement, une orthogonalisation séparée des vecteurs à interface fixe et des vecteurs à interface libre devra être fournie, comme cela a été fait dans le cas de test SDLS122 [V3.02.122]. VARE : "Spécifications d'implémentation du calcul transitoire linéaire avec sous-structuration dynamique dans Code_Aster" - Rapport de D.E.R.