Cartesian Genetic Programming (CGP) is a form of GP where an individual of the system addresses an indexed graph on the Cartesian coordinate system. An individual is evaluated by executing the nodes connected from the input nodes to the individual's output node(s).
Motivation
The difference lies in the learning mechanism, i.e. the method in which the pheromone model is updated. Ants can travel from one node to another, guided by the pheromone levels on the routes represented in the model.
Objectives
The presence of neutrality has proven to be useful in developing solutions to the problem. When applying ACO to any problem, the concept of maintaining a pheromone model and learning from possible solutions remains the same.
Methodology
We then proceed to execute all the nodes connected to the output node that returns the individual's output. The higher the fitness of the individual, the greater the level of pheromone deposited.
Results and Contribution
Finally we simulate the work done in Cartesian Ant Programming (CAP) and compare our results for Fixed Target Evolution and Moving Target Evolution experiments.
Structure of this Thesis
We then show how our system performs in different environmental conditions, namely Random Evolution, Fixed Target Evolution and Moving Target Evolution. To end this chapter, we present the results found in the comparison of our system with CAP for the Fixed Target Evolution and Moving Target Evolution experiments.
Genetic Programming
The remaining individuals of the population are created by selecting one or more individuals from the current population at a time, applying genetic operators to them, and placing these new individuals in the next generation. Reproduction selects an individual from the current population and duplicates it into the next generation population.
Cartesian Genetic Programming
Evaluating an individual can be done in a number of ways: i) a feed forward execution of all nodes, from the input nodes to the output nodes; ii) recursively executing connected nodes from the output nodes to the input nodes; or iii) using a two-pass scheme where we mark the connected nodes moving from the output nodes to the input nodes in the first pass and in the second pass we output the marked nodes from the input nodes to the output nodes. A CGP system follows the same algorithm as an EA as shown in Algorithm 1, where each subsequent generation contains the best individuals from the previous generation and the remaining population is populated with individuals by applying different genetic operators to individuals from the current generation.
Ant Colony Optimization
Rank-based Ant System
MAX-MIN Ant System
Pheromone evaporation is a decrease in the level of pheromone on a route caused by the non-selection of that particular route over a period of time. This is called the MAX-MIN Ant System because the pheromone levels are bound to the interval [τmin,τmax].
Model-based Search
The AP system builds and modifies programs according to a pheromone model called a pheromone tree. A pheromone tree consists of a number of pheromone tables for each node of the tree, containing pheromone values for possible functions and terminals for the corresponding node. Our method is similar to Cartesian programming of ants [26], where a pheromone model is sampled to generate the genome of a CGP individual, and uses the Max-Min Ant System (MMAS) [13] as a learning algorithm to update the pheromone model.
Evolvability
Such a reward is achieved by increasing the pheromone level of the entities that provided the best solutions. To conclude this section, we provide a description of the experiments performed to evaluate our system. At the end of each iteration, only the top-ranked ants of the current iteration and the ant that created the best individual (i.e. the individual with the highest fitness) update the pheromone table according to the fitness of the individuals they create .
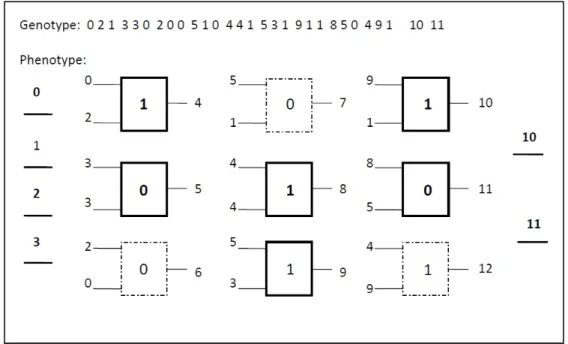
Cartesian Genetic Programming Representation
These parameters once set at the beginning do not change for the number of iterations the system is allowed to run. The nodes highlighted in Figure 3.1 are the used nodes, i.e. the nodes that contribute to the fitness of the individual and the rest are redundant. These nodes are called redundant as they are not connected to the output nodes and therefore have no say in the eligibility.
Pheromone Model
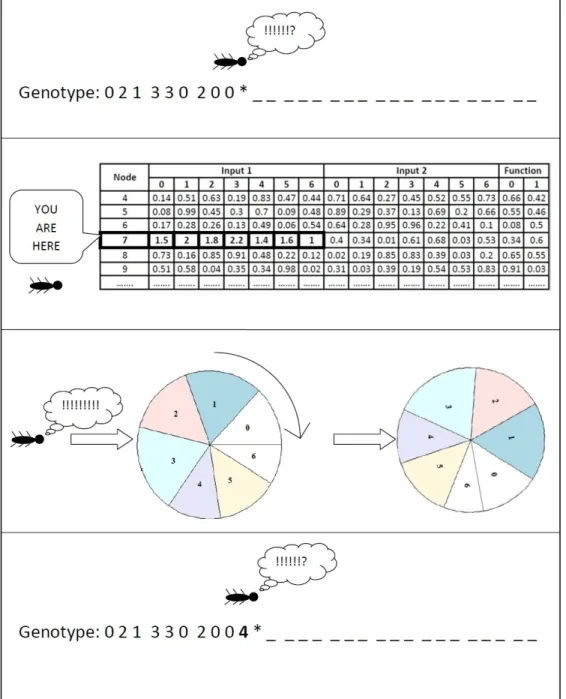
Genome Creation
The wheel spins and an entity is selected on which the roulette wheel stops. The more likely the subject is to be selected, the larger the roulette wheel stake it is assigned, and the more likely the subject is to be selected. The area occupied by an entity on the roulette wheel is proportional to the amount of pheromone, so node 3 has a larger space on the wheel since it has the largest amount of pheromone.
Individual’s Evaluation
The inputs to the output node are identified as the next nodes to mark. After all connected nodes are marked as visited, we start executing them, starting from the input of the system towards the output nodes. We output nodes from system input moving to the output node because some nodes take the output of another node as input.
Pheromone Model Update
The first output node is identified in the phenotype of the individual and marked as visited. After evaluating each individual of the iteration, the ants are ranked according to the quality of the individuals they generate. Out of the total number of ants in each iteration, only the (n−1) best ranked ants and the best ant, i.e. the ant that has produced the best solution so far (this ant can be from the current iteration or from ' be a previous iteration) update the pheromone table.
Measuring Rate of Evolution
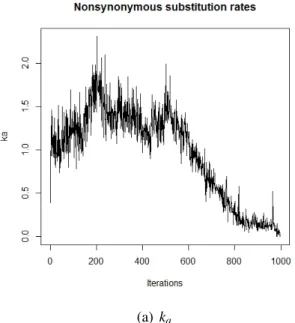
As in [1], we record all changes in each gene during the iterations of the algorithm. We calculate such accumulated numbers of non-synchronous cak(t) and synchronecsk(t) changes in genekup to iterationt as follows: initiallycak(0) =csk(0) =0, for all the geneskin genome. We add the sensitivities of all genes in the representation to obtain the total non-synonymous and synonymous sensitivities Na(t) and Ns(t).
Measuring Diversity
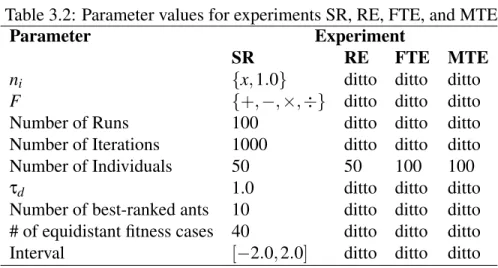
Experimental Design
Rate of Evolution Under Different Parameter Settings
Varying Environmental Scenarios
In this experiment, as the target keeps changing, it becomes difficult for the system to converge to an optimal solution given the few iterations we run it. The purpose of this experiment is to study the adaptability of our system to change. We incorporate evaporation to balance the effects of depositing a large amount of pheromone when the target is small, which prevents the exploration of alternative paths when the target is changed.
AC-CGP vs CAP
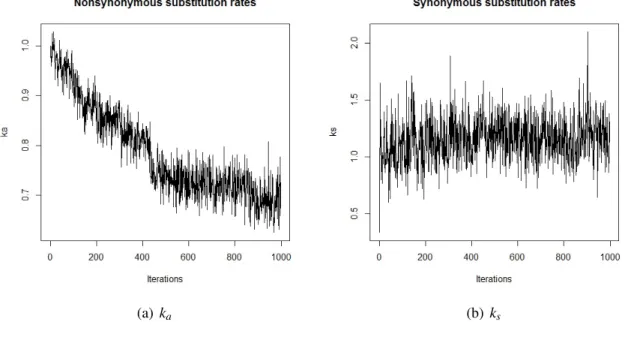
We conduct an experiment with 50 individuals and observe how our system evolves at various stages of implementation. As the system generates individuals with maximum fitness and converges to a solution, the number of synonymous changes increases until the peak of the run. Re is high at the beginning of the run and gradually decreases as the run continues.
Rate of Evolution Under Different Parameter Settings
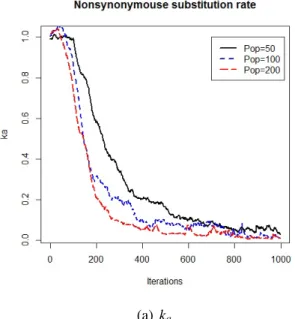
Population Size
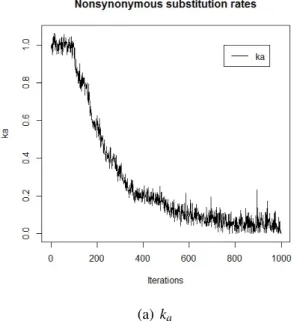
Repeat its maximum value during the run remains slightly around 1.0, which is similar to what is observed in natural evolution. The synonymous substitution rate at a runtime is low at the start of the run and continues to increase as the importance of generating synonymous changes increases as the run progresses. The system continues to accept synonymous changes and reject harmful non-synonymous changes as the run progresses.
Number of ranked-ants
The system is more open to accepting changes with a larger number of ranked ants, as they do not negatively affect the average fitness of the system. The synonymous substitution rate follows a similar trend for all the different numbers of ranked ants, where it continues to be at a minimum low at the start of the run and a maximum high as the system converges to the solution. The evolution rateRe shows us that with fewer number of ranked ants 5 and 10, the system reaches zero evolution faster according to the scheme of natural evolution, with Reat maximum for the race close to 1.0.
Initial pheromone level
Observing the non-synonymous substitution rates in Figure 4.3(a), we note that the system with a smaller number of sorted ants, i.e. 5 and 10 , requires a relatively smaller number of iterations to produce the necessary adaptive changes required to converge to the optimal solution. . Even with 20 ranked ants, the number of non-synonymous changes in the run continues to be higher than with 5 and 10 ranked ants. With a lower initial pheromone level, the system needs fewer iterations to make the appropriate adaptive changes to converge to a solution.
Rate of Evolution Under Different Environmental Conditions
Random Evolution (RE)
The effect of the initial pheromone level on the evolution rate Re can be analyzed from the substitution rates (Figure 4.4(a) and 4.4(b)) and the evolution rate (Figure 4.4(c)).
Fixed Target Evolution (FTE)
Moving Target Evolution (MTE)
AC-CGP vs CAP
Fixed Target Evolution (FTE)
The result of the substitutions is seen in the rate of evolvabilityRe in Figure 4.8(c), the AC-CGP approach has a higher rate ofRethroughout the entire run, where the system converges to zero evolvability towards the end of the run. Using the pheromone update method as used in CAP, the system has a higher value of Re at the start of the run and reaches zero volvability faster than the AC-CGP approach.
Moving Target Evolution (MTE)
Whereas the system with a population of 50 takes more time to converge to a solution and the system must introduce a higher degree of variability for the system to reach a solution. However, this affects the rate of evolution where a system that uses 20 ranked ants to update the pheromone table introduces a higher degree of variability into the system. Regarding the change of the initial pheromone level (ρ and 1.0) we see that the system with an initial pheromone level of 0.1 converges to a solution faster and presents a lower degree of variability.
Future Work
To test this further, one could perform a few more comprehensive tests to test the system's effectiveness in dynamic environments. We lay down the following couple of tests one could perform to study the effectiveness of the system in a more variable dynamic environment. Moving Target Evolution (MTE) a problem where the target changes at different stages of the run.
CGP: genotype-phenotype mapping
Genome Creation
A single evolution run
Evolution with different population sizes
Evolution with different number of ranked-ants
Evolution with different number levels of initial pheromone
A random evolution run
A fixed target evolution run
A moving target evolution run
FTE: AC-CGP vs CAP
MTE: AC-CGP vs CAP