Ce choix de partition unitaire évite les problèmes de rigidité d'intégration, considérablement coûteuse pour les méthodes Meshless (notamment EFG, DEM, RKPM). La méthode « Level Sets » a été introduite dans le contexte de la mécanique des fluides pour représenter l'évolution des interfaces.
Aspect théorique des level sets
Le choix de la fonction distance n’a pas d’importance ici, car seule la connaissance de l’iso-zéro est utile et importante. La phase de propagation des fissures conduit simplement à la propagation des level sets.
Calcul des level sets
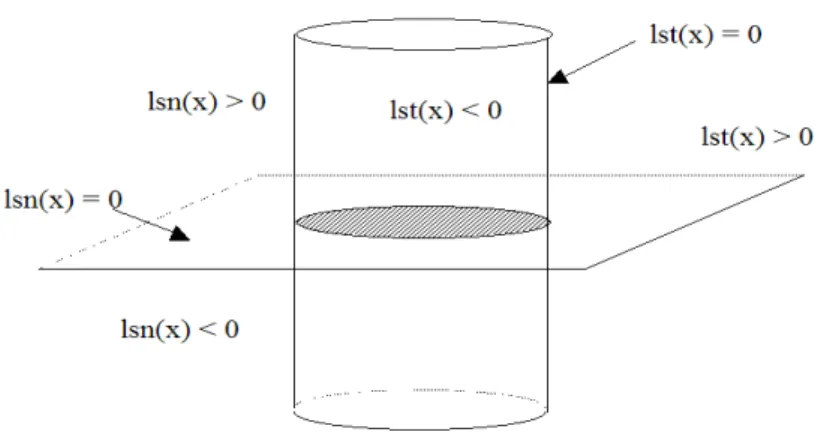
- Calcul de la level set normale (lsn)
- Calcul de la level set normale en 3D
- Calcul de la level set normale en 2D
- Calcul de la level set tangente (lst)
- Approximation des level sets
- Réajustement des level sets
- Notion de vraie distance signée
- Multi-fissuration
L’erreur de discrétisation de l’ensemble de niveaux est directement liée à la taille du maillage et à la courbure de l’ensemble de niveaux. Avec une interpolation quadratique, dans un élément quadrilatère QUAD8, on écrit l'approximation du level set.
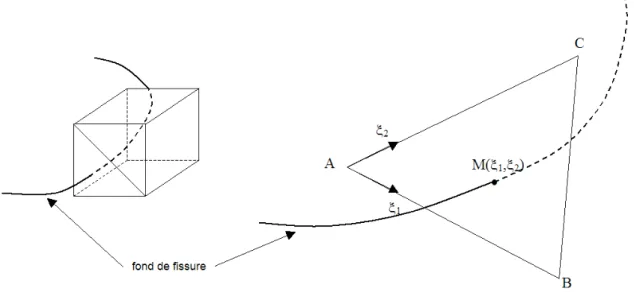
Base locale au fond de fissure
Quant à la propagation [R7.02.13], on peut définir plusieurs fissures dans le modèle et on peut donner la liste des fissures qui se propagent : à chaque appel à l'opérateur PROPA_FISS, toutes les fissures données se propagent. Les fissures doivent être suffisamment espacées (au moins trois mailles sans fissures doivent les séparer).
Détermination du fond de fissure
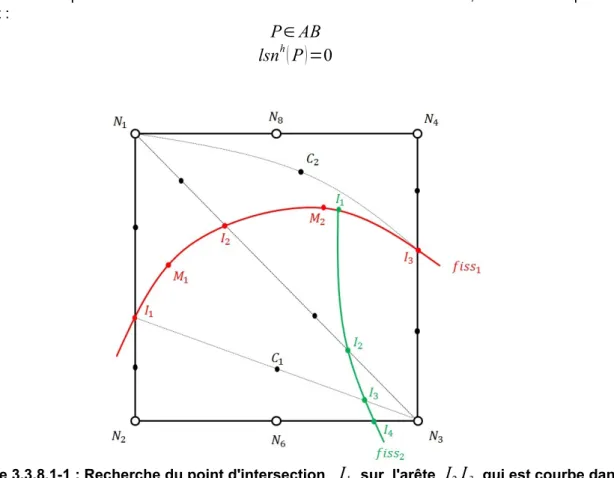
Recherche des points du fond de fissure
Si le plan n'est pas un plan du bord géométrique de la structure, il est commun à deux mailles dans la liste des mailles inférieures, donc un point bas peut être détecté (au moins) deux fois. Pour vérifier que le point M nouvellement détecté n'appartient pas déjà à la liste des points P du fond, on procède à une caractérisation du point M selon qu'il est situé sur un sommet du plan, une arête hors du plan ou bien dans le visage.
Orientation du fond de fissure
- Explication de la méthode d'orientation du fond de fissure
- Cas d'un fond de fissure multiple
- Algorithme utilisé pour l'orientation du fond
Si nous avons affaire à un nouveau couple, le deuxième indice est le prochain point bas. Lorsque nous avons affaire à un nouveau couple, le premier indice est le prochain point bas.
Problème général
Enrichissement de l’approximation du déplacement
- Enrichissement avec une fonction de sélection de domaine (2ème terme)
- Enrichissement avec une fonction de sélection de domaine pour un branchement de
- Enrichissement avec les fonctions singulières (3ème terme)
- Enrichissement géométrique
- Enrichissement dans Code_Aster
- Enrichissement (statut) des nœuds
- Enrichissement (statut) des mailles
- Annulation des degrés de liberté enrichis « en trop »
- Conditionnement lié à l'enrichissement
- Généralités sur le conditionnement XFEM
- Les critères estimatifs pour améliorer le conditionnement
- Le pré-conditionneur XFEM pour les matrices
Ainsi, lorsque h tend vers 0, la taille de la zone d'influence de l'enrichissement tend également vers 0. ainsi que la valeur de la level set tangente au point C, on détermine d'abord l'abscisse curviligne s telle que. Nous dérivons l'expression du point C ainsi que la valeur du plan tangent défini dans C : lst(C)=lst(A)+s(lst(B)−lst(A).

Sous-découpage
Phase préalable de découpe des hexaèdres pour se ramener à des tétraèdres
Notez que cette division est le choix par défaut, mais on aurait aussi pu choisir une autre façon de diviser un hexaèdre en 2 pentaèdres, ainsi qu'une autre façon de diviser un pentaèdre en 3 tétraèdres. De plus, il faut prendre en compte les nœuds centraux sur les nouvelles arêtes générées par la découpe : ces nœuds centraux coïncident avec les nœuds centraux de l'élément entier. Nous ajoutons donc virtuellement à l'élément les nœuds du milieu nécessaires pour trouver l'élément complet de la figure 3.3.1-2.

Phase préalable de découpe des pentaèdres pour se ramener à des tétraèdres
Phase préalable de découpe des pyramides pour se ramener à des tétraèdres
N1N2N3N5 Tableau 3.3.3-1 : Division d'une pyramide en tétraèdres Pour une pyramide quadratique (pyra13) on utilise la division ci-dessus. Subdiviser un quadrilatère en deux triangles revient à diviser une pyramide en deux tétraèdres.
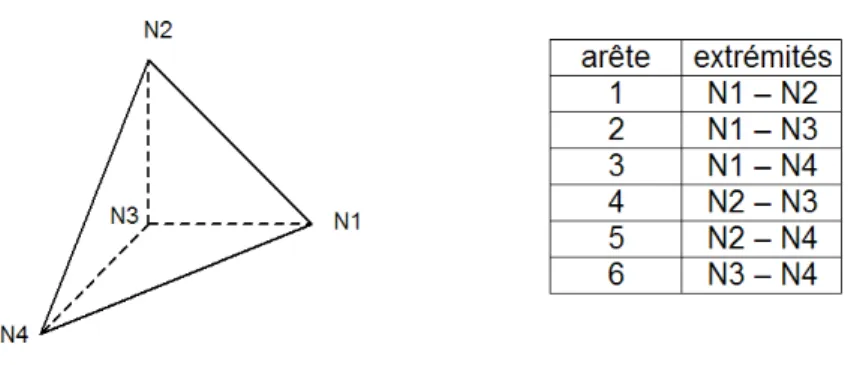
Sous-découpage d’un tétraèdre en sous-tétraèdres
- Trois points d’intersection dont deux points sommets
- Trois points d’intersection dont un point sommet
- Cinq points d’intersection dont deux points sommets
- Trois points d’intersection dont aucun point sommet
- Quatre points d’intersection dont un point sommet
- Six points d’intersection dont deux points sommet
- Quatre points d’intersection
- Cinq points d’intersection dont un point sommet
- Quatre points d’intersection dont un point sommet
Pour réduire les possibilités de coupe (puisqu'il y a au moins 6 possibilités de coupe étant donné les 6 arêtes du sous-tétraèdre) on construit une bijection à un seul élément coupant. E,F,G,H définissent les inconnues pour ordonner la découpe du sous-tétraèdre. Il s'agit d'un cas particulier de la coupe précédente où la surface lsn=0 passe également par un autre sommet. Il s'agit d'un cas particulier de la coupe précédente où la surface lsn=0 passe également par l'un des sommets.
Multi-découpage
Une autre stratégie consisterait à regrouper les sous-éléments par zone et à trouver le nombre optimal de points de Gauss (et de poids) par zone. territoire. On ne stockerait plus les sous-éléments mais directement les zones avec les points de Gauss associés.
Nombre maximum de sous-éléments
- Cas du tétraèdre
- Cas du pentaèdre
- Cas de l’hexaèdre
- Cas du multi-découpage
Comme auparavant, le scénario dans lequel les six tétraèdres seraient chacun subdivisés en six sous-éléments est impossible. Le nombre maximum de sous-éléments générés est alors difficile à évaluer et une limite supérieure du nombre maximum de sous-éléments serait trop élevée. Nous choisissons de fixer le nombre maximum de sous-éléments pour les éléments multi-fissuré à quatre fois le nombre maximum de sous-éléments pour une seule fissure.
Sous-découpage 2D
Le cas maximum est celui correspondant au cas mentionné au paragraphe précédent : les deux pentaèdres dérivés de l'hexaèdre (voir Figure 3.3.1-1) sont chacun subdivisés en 16 sous-éléments. Ce nombre d'éléments de sous-intégration pour un hexaèdre est totalement inatteignable, car il va de soi que les tétraèdres issus de la 1ère coupe ne seront pas tous coupés par les fissures suivantes, mais il est difficile de donner une meilleure limite supérieure pour montrer Un réajustement peut alors être nécessaire pour assurer l'unicité de la solution de l'équation lsn=0 le long de la diagonale (cf. réajustement des level sets [§2.2.4]) lorsque les éléments enfants sont découpés en éléments de sous-intégration.
Algorithmes de sous-découpage
- Calcul des points d'intersection
- Calcul des points milieu
Par conséquent, à proximité du point d’intersection, la variation du level set redevient strictement monotone. En fonction de l'emplacement du point central (soit situé entre 2 points d'intersection, soit situé dans le plan quadrilatère à l'iso-zéro), nous avons disposé les coordonnées exactes de ξM et ⃗ v dans l'élément de référence. Algorithme de Newton-Raphson pour calculer un point central sur l'isozéro du niveau défini.
Récupération des facettes de contact
- Éléments XH
- Éléments XHT et XT
- Les éléments multi-Heaviside
- Nombre maximum de facettes récupérées
- Cas 2D
- Cas 3D
- Cas multi-Heaviside
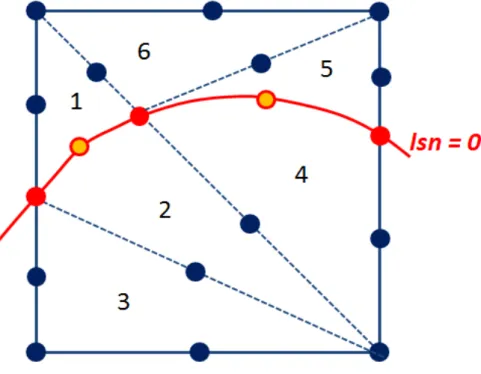
Nous recherchons les aspects de contact dans les sous-éléments 2, 3 et 4 qui vérifient lsn<0. Dans le cas 3D, pour un hexagone, on peut augmenter le nombre maximum de faces de contact pour une seule fissure à 18. 3D, pour un hexaèdre, on fixe le nombre maximum de faces de contact par fissure à 30.
Intégration de la rigidité
- Intégrande du terme de rigidité mécanique
- Intégrande du terme de rigidité géométrique
- Calcul des dérivées des fonctions singulières
- Schémas d’intégration
- Intégration des termes non singuliers
- Intégration des termes singuliers
Lorsque la singularité est à la frontière du domaine d'intégration, des changements successifs de variables bien choisis permettent de se réduire à l'intégration sur un domaine unitaire d'une fonction non singulière, polynomiale (ou quasi-polynomiale), sur laquelle une fonction classique L'intégration de Gauss-Legendre s'avère efficace et rapidement convergente [bib28]. Malgré des résultats très satisfaisants en termes de convergence de l'erreur relative d'intégration à chaque terme [bib28], l'effort d'implémentation pour les structures 3D nous paraît significatif [bib35]. Actuellement, nous avons implémenté le même schéma classique de Gauss-Legendre que celui utilisé pour l'intégration de termes non singuliers.

Intégration des seconds membres surfaciques
Intégrande du second membre des efforts surfaciques
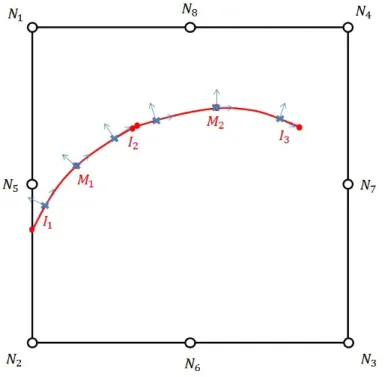
Les seconds membres sont écrits de manière discrétisée en raison des forces de surface exercées sur les lèvres de la fissure. Pour les éléments 2D, les options CHAR_MECA_PRES_R, CHAR_MECA_PRES_F, CHAR_MECA_PCISA_R et CHAR_MECA_CISA_F permettent d'appliquer des forces mécaniques de pression et de cisaillement réparties sur les surfaces de contact. La figure ci-dessous (Figure 3.6.2-1) illustre l'intégration numérique de surface sur les facettes de contact d'un quadrilatère.
Introduction
Restrictions
Problème traité
Approximation X-FEM du champ de température
En mécanique, quatre fonctions, déterminées à partir de l'évolution asymptotique du champ de déplacement en fond de fissure, sont introduites dans le terme d'enrichissement unique. En thermique, nous introduisons uniquement la fonction F1, qui est la seule fonction (des quatre) discontinue à travers la fissure. Ce type d'enrichissement, retenu dans [numéro 75] dans le cas d'une condition d'écoulement nul imposée sur les lèvres de la fissure (fissure adiabatique), est introduit ici pour le cas d'une fissure adiabatique et pour le cas d'une condition d'échange '. entre les lèvres de la fissure.
Intégration des matrices et des vecteurs élémentaires
Intégrales volumiques
Intégrales surfaciques
Nous présentons ensuite la contribution des groupes de niveaux aux éléments finis classiques, qui devraient être capables de construire une base locale au fond de fissure en 3D. Comme nous l'avons vu au paragraphe [§2.3], les gradients des level sets donnent une base locale au fond de fissure. Le champ thêta est construit à partir de ce fond de fissure discrétisé et la méthode G-thêta est appliquée.
Méthode G-thêta pour le calcul de G
Relations d’équilibre
Car pour pouvoir l'utiliser en 3D, il faut connaître la base locale en fin de fissure afin d'exprimer les champs asymptotiques en fonction des coordonnées polaires r ,θ. En post-traitement, nous définissons les champs de réseau à deux niveaux à partir de la fissure maillée et en déduisons une discrétisation du fond de fissure. Dans ce cas, la fissure n'est pas maillée, mais la procédure suivie est presque la même : la discrétisation du fond de fissure est déterminée par des ensembles de niveaux, un champ thêta est construit et G-thêta est appliqué.
Expression lagrangienne du taux de restitution d’énergie
Les relations d'équilibre dans une formulation faible s'écrivent donc comme suit : Trouver u∈V tel que. Utilisons d'abord la relation qui donne la dérivée lagrangienne d'un corps en fonction de sa dérivée eulérienne. Deuxièmement, utilisons la relation qui donne la dérivée lagrangienne du gradient d'un champ en fonction du gradient du champ et du gradient de la dérivée du champ.
Discrétisations
Cette forme de J-intégrale n'utilise pas d'intégrales de contour, mais des intégrales de domaine.
Méthode G-thêta pour le calcul de KI, KII et KIII avec les level sets
Forme bilinéaire de g
- Expression de S1 et S1TH
- Expression de S2 et S2TH
- Terme surfacique
- Terme thermique
Pour le calcul de Ki, v est le champ asymptotique en mode i, obtenu pour Tv=Tréf, donc les termes en Tv−Tréf sont simplifiés. Pour le calcul de Ki, v est le champ asymptotique en mode i, obtenu pour Tv=Tréf, donc les termes en Tv−Tréf sont simplifiés. Pour le calcul de Ki, v est le champ asymptotique en mode i, obtenu pour Tv=Tréf= cste, soit les termes dans TTHE=.
Séparation des modes mixtes
Pour cela on note R comme la matrice des vecteurs de la base globale écrite dans la base locale (matrice de passage). Soit i et j des indices globaux, alors la jième dérivée de la ième composante de u s'écrit.

Discrétisations
Méthode G-thêta avec X-FEM
17 STOLARSKA M., CHOPP D.L., MOËS N., BELYTSCHKO T., "Modelling crack growth by level sets in the extended finite element method", International Journal for Numerical Methods in Engineering, vol. 24 MOËS N., DOLBOW J., BELYTSCHKO T ., "A finite element method for crack growth without remeshing", International Journal for Numerical Methods in Engineering, vol. 32 SUKUMAR N., MOËS N., MORAN B., BELYTSCHKO T., "Extended finite element method for three-dimensional crack modeling", International Journal for Numerical Methods in Engineering, vol.