Modèles globaux
Objectifs de la loi GLRC_DM
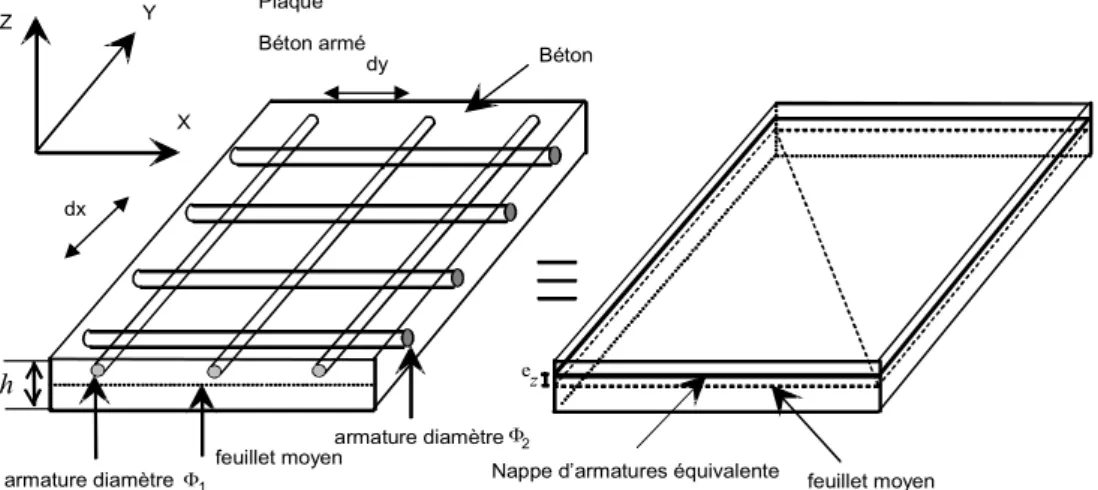
L’utilisation de la théorie des plaques et coques minces permet de décrire efficacement le comportement mécanique des structures en béton armé, généralement élancées. Dans un premier temps dans la construction du modèle, nous supposons l'existence d'un milieu homogénéisé ayant le même comportement mécanique que la structure en béton armé, à laquelle nous nous intéressons.
Énergie libre
2 pourrait être différent, mais selon l'hypothèse que l'on fait sur la symétrie de la plaque par rapport à la plaque moyenne, les valeurs sont les mêmes. Dans [éq 2.3-2] nous voyons que le paramètre régule la contribution de la flexion au seuil d'endommagement initial, puisque. V17 : ERRCOM : Erreur exprimée en pourcentage entre les aires de la courbe de compression théorique (définie par EPSI_C et FCJ) et la courbe approchée (NYC, GAMMA_C) entre 0 et COMMAX.
V 18 : ERRFLE : erreur exprimée en pourcentage entre les aires de la courbe de flexion théorique (calcul du profil en béton armé) et de la courbe estimée (MFY, GAMMA_F) entre 0 et FLEM AX. La condition de contraintes planes pour la membrane zz=0 est remplie comme décrit au § 2.3. Cette différence est directement liée aux différentes considérations de flexion de l’état de contrainte de la membrane et du plan.
Cela vient du choix de formulation du modèle de membrane GLRC_DM, en ligne directe du modèle ENDO_ISOT_BETON. Dans la continuité de l'analyse faite au § 3.1, dès le début de l'endommagement, la contrainte longitudinale dans le béton est égale à la paroi de la plaque (on sait qu'alors l'endommagement progresse immédiatement dans une bonne partie de l'épaisseur de la plaque). section). Ces deux méthodes reposent sur une identification préalable de la courbe théorique de courbure-flexion de la section.
La réponse de la section est calculée en intégrant les réponses sur la hauteur de la section. Le moment est alors déterminé à partir de la valeur de la déformation sur l'axe neutre et de la courbure. Dans le cas de la modélisation de la section de coque proposée, le module de flexion résultant s'applique.
Contraintes généralisées
Seuils et évolution de l’endommagement
L'évolution des variables d'endommagement est donc obtenue en utilisant la condition de consistance, les fonctions x, d étant convexes, les modules d'écrouissage − f, d. On remarque qu'en chargement membranaire endommageant uniaxial pur (d ˙1= ˙ d2 0) , la force thermodynamique s'exprime : Ym d =−Eeqmh 2.
Intégration numérique
L'équation [éq 2.4-1] doit être résolue en prenant également en compte la condition de contrainte plane, ce qui permet de zz, dj, éq. Cette phase de correction se termine lorsque le critère de convergence, exprimé en termes énergétiques, est atteint.
Opérateur de raideur tangente
La transformation nécessaire pour l'utiliser ultérieurement dans la construction de la matrice de rigidité globale est précisée dans le chapitre suivant. Pour simplifier l'écriture, nous définissons un vecteur de contraintes généralisées (force membranaire, moment fléchissant), , et un vecteur de déformations généralisées (extension, courbure), E,. Elle peut être calculée comme la somme de deux contributions : la contribution correspondant à une non-évolution du dommage et la contribution résultant de l'évolution du dommage.
De plus, nous considérons la structure du tenseur C composé des contributions normales force-extension, moment-courbure et de leurs couplages. On voit de [éq 2.5-2] que les couples moments/allongement et forces membranaires/courbure ne sont introduits que par la partie dissipative. Ce couplage a une justification physique, puisque toute fissure perpendiculaire à la couche moyenne de la plaque affecte à la fois le comportement de la membrane et celui de la flexion.
Les sous-matrices Cemm, Ceff, Cdmm, Cdmf, Cdff sont données dans le référentiel approprié par les expressions qui suivent. Une fois les deux mécanismes de dégâts activés, nous devons résoudre les systèmes suivants.
Changement de repère
Calcul de la dissipation
Variables internes du modèle
On introduit également V5, V6 et V7, dont le rôle est de mesurer l'affaiblissement relatif de la rigidité de la dalle en béton armé de manière rationnelle, par exemple par visualisation en chaque point matériel. Ces variables dépendent des déformations limites EPSI_ELS (frontière à ELS) et EPSI_LIM (frontière à ELU), qui sont fournies via DEFI_MATERIAU/GLRC_DM. V8 : ACIXELS : le rapport entre la déformation de l'acier dans la direction X (maximum entre la couche inférieure et la couche supérieure) et la déformation EPSI_ELS.
V 9 : ACIXELU : le rapport entre la déformation de l'acier dans la direction X (maximum entre la couche inférieure et la couche supérieure) et la déformation EPSI_ELU. V10 : ACIYELS : rapport entre la déformation de l'acier dans la direction Y (maximum entre couche inférieure et couche supérieure) et la déformation EPSI_ELS. V 11 : ACI Y EL U : rapport entre la déformation de l'acier dans la direction Y (maximum entre couche inférieure et couche supérieure) et la déformation EPSI_EL U.
V 12 : BETSUP : rapport entre la déformation principale (compression) la plus faible du béton en face supérieure et la déformation limite de compression du béton EPSI_C. V13 : BETINF : le rapport entre la déformation principale la plus faible (en compression) du béton en face inférieure et la déformation limite du béton en compression EPSI_C.
Utilisation du modèle GLRC_DM en situations thermomécaniques
Rappelons que le modèle GLRC_DM ne modélise pas la plastification de l'acier et n'est donc pas prédictif dans ce domaine. Nous reconnaissons également que les coefficients et paramètres du matériau ne dépendent pas de la température dans la plage étudiée. Cette répartition affine de température dans l'épaisseur entraîne donc une déformation de la membrane et une variation de courbure thermique, d'où un simple déplacement des déformations et courbures de la membrane en fonction des températures de paroi des plaques.
Une fois ce basculement opéré, il n'y a donc pas d'impact direct sur l'expression de la loi de comportement, ni sur le calcul des évolutions irréversibles. Dans ce cadre d'hypothèses, le modèle GLRC_DM peut donc être utilisé en situation thermomécanique stationnaire sans modification. Le modèle de dalle en béton endommagé GLRC_DM a donc besoin de paramètres caractérisant l'élasticité, complétés par 6 paramètres pour décrire le comportement à l'endommagement : k0, pour définir la limite élastique, pour déterminer la participation de flexion (voir § 2.2), mt , mc et αc, f pour décrire la réponse non linéaire.
Tous ces paramètres peuvent être identifiés à partir d’essais de traction monotone et de flexion uniaxiale pure. Il est possible de partir soit de simples estimations analytiques (qui donnent des ordres de grandeur), soit d'un recalibrage vers une courbe de réponse fournie par un autre modèle comportemental, intégrant éventuellement des arbitrages.
Identification des paramètres de comportement élastique linéaire
Certains d'entre eux sont remplacés dans le jeu de données Code_Aster par des paramètres plus « significatifs », voir ci-dessous au § 3.2.5. Nous décrivons la démarche dans les paragraphes ci-dessous et en faisons le point au § 3.2.5. facteur GLRC_DM) diffère de E et , qui dans ce cas ne servent qu'à décrire l'élasticité de la membrane. L'identification des paramètres élastiques Eeqm, m, Eeqf et f du modèle à partir des caractéristiques du béton et de l'acier s'appuie sur deux cas de chargement : traction pure et flexion pure.
Considérons les caractéristiques suivantes pour le béton : module d'Young Eb, coefficient de Poisson b, épaisseur de plaque h et pour les aciers : module d'Young Ea, coefficient de Poisson a, section totale par mètre linéaire (pour les deux couches, supposées symétriques en épaisseur et identiques dans les deux sens) Sa, la position relative d'une couche dans l'épaisseur. On remarque que cette identification produit une erreur dans la rigidité élastique en cisaillement dans le plan de la plaque, à laquelle les aciers ne contribuent pas (ce sont des âmes de barres soudées), ce qui rend le comportement homogénéisé orthotrope plutôt qu'isotrope. Si l'on préfère fournir une identification a priori dans le cas du cisaillement élastique plan de la plaque, et dans le cas de la réponse selon la direction de traction pure (donc en acceptant l'erreur sur l'effet de Poisson orthogonal), on obtient
Il faut veiller à ce que cette identification approximative (thermodynamiquement inacceptable par rapport à l'essai de traction pure) ne donne pas des valeurs fantastiques de m. On remarque également que cette identification produit une erreur sur la rigidité élastique anticlastique en flexion Mxy de la plaque (coefficient Geqf = Eeqf h3.
Identification des paramètres de comportement élastique endommageable
- Paramètres de traction (mots-clé NYT, GAMMA_T)
- Seuil d’apparition de l’endommagement en traction NYT
- Paramètre de dégradation de raideur en traction GAMMA_T
- Cas distorsion uniaxiale pure
- Paramètres de compression (mots-clé NYC, GAMMA_ C, ALPHA_C )
- Paramètres de flexion (mots-clé MYF , GAMMA_ F )
- Options RIGI_ACIER et PLAS_ACIER
- Option RIGI_INIT
- Option UTIL
- Cas traction-flexion uniaxiales
- Bilan de l'identification des paramètres du modèle GLRC_DM
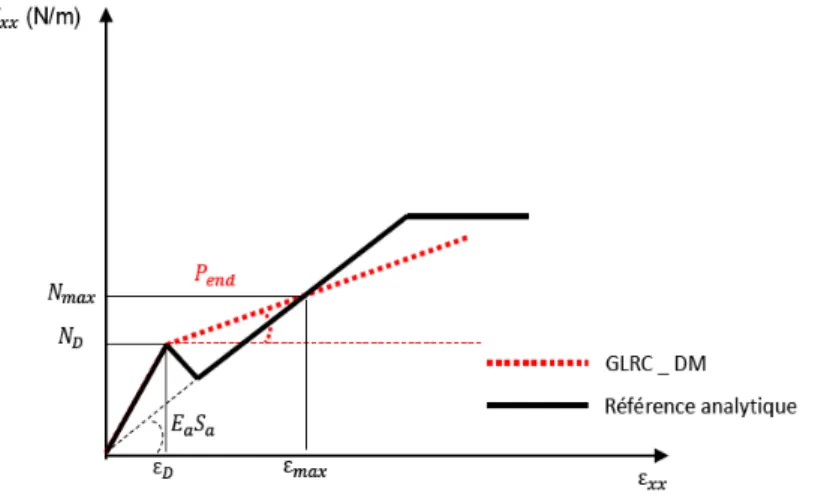
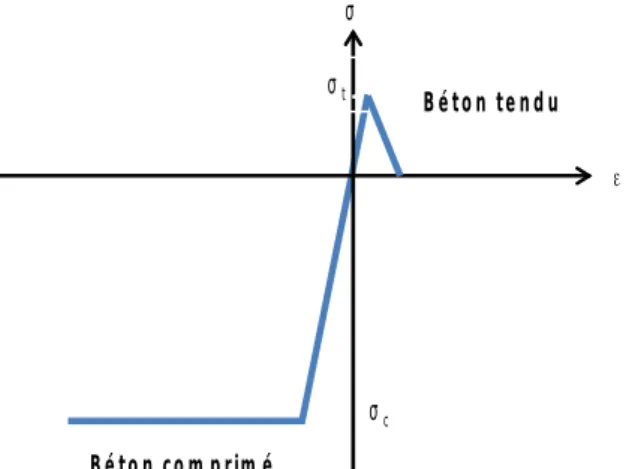
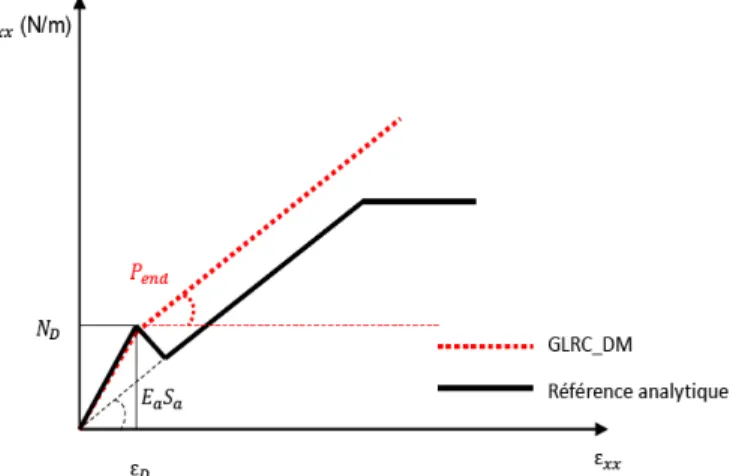
Le paramètre mt est égal au rapport de la pente correspondant à la raideur de la phase endommagée, fournie par le mot-clé PENTE/TRACTION dans DEFI_GLRC, à la pente correspondant à la raideur élastique. Le paramètre γf est égal au rapport de la pente correspondant à la raideur de la phase endommagée, fournie par le mot clé SLOPE/FLEXION dans DEFI_GLRC, sur la pente correspondant à la raideur élastique. La réponse non linéaire du béton, qui est déterminée par la limite de traction SYT, la limite de compression SYC et le paramètre c, qui détermine la valeur de la pente du comportement en traction du béton po.
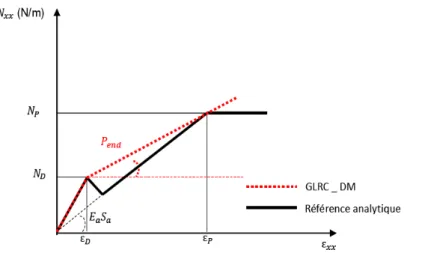
Pour les données de courbure, nous déterminons la valeur de déformation au niveau de l'axe neutre pour obtenir un résultat de force axiale nulle. Pour garantir la cohérence des formules et les mêmes résultats en flexion élastique, nous utilisons le module d'Young modifié du béton lors du calcul de la réponse en section transversale via intégration en hauteur. A partir du point de départ de la première fissure MD, on recherche le plus petit moment sur la courbe élastique pour lequel l'écart à la courbe théorique dépasse 5 %.
La pente d'endommagement en flexion uniaxiale pure est alors définie comme la pente de la tangente à la courbe moment-courbe théorique et passant par le point seuil spécifié. Ensuite nous déterminons la valeur de la courbure et du moment seuil κs et MYF afin de minimiser l'aire entre la courbe théorique et la courbe bilinéaire. On retient l'approximation bilinéaire qui minimise l'écart entre l'aire sous sa courbe et celle de la courbe théorique.
Un modèle global pour le comportement des dalles en béton armé sous chargement dynamique de flexion : une loi GLRC améliorée : modélisation de la fissuration par endommagement.