Équations du mouvement
La figure 1.1-b montre le modèle et les notations des roulements, tandis que la figure 1.1-a montre une vue schématique de la ligne d'essieu. Une ligne de queue comporte un nombre d'éléments dimensionnels relativement important (géométrie, différentes propriétés du matériau), il est donc difficile de déterminer un profil à la fois simple et représentatif de son comportement élastique.
Modélisation des parties tournantes
En présence d'un changement de section important, la masse impliquée dans le mouvement correspond bien à la géométrie de la section. Ceci permet de négliger les modes locaux dus aux pales du rotor et de simplifier le modèle de structure.
Modélisation des paliers de supportage
Paliers linéaires
Les sections de rigidité peuvent ne pas correspondre à la géométrie de la structure du rotor, notamment en cas de changements brusques de section. En première approximation, un comportement linéaire peut être maintenu pour les roulements, ce comportement est fonction de la vitesse de rotation.
Paliers non linéaires
En particulier, avec l'hypothèse de petits déplacements, les coefficients de rigidité et d'amortissement peuvent être calculés en linéarisant les équations de Reynolds autour de la position d'équilibre. Ces coefficients peuvent être calculés analytiquement en fonction de la géométrie du roulement, que l'on retrouve dans la littérature spécialisée pour des géométries de roulements très simples.
Modélisation de la table de groupe
- Appuis infiniment rigides
- Supports simplifiés
- Supports tridimensionnels
- Supports généralisés
- Supports de type impédance
Les opérateurs actuellement utilisés pour les études de machines tournantes concernent l'affectation de modèle (AFFE_MODELE) et l'affectation de caractéristiques élémentaires (AFFE_CARA_ELEM).
Affectation des modèles
Affectation des caractéristiques élémentaires
Il est possible de calculer les états de rotation d'un système d'arbres rotatifs en présence de roulements dont les propriétés de rigidité et d'amortissement dépendent de la vitesse de rotation.
Axe de rotation
Passage Repère global / Repère local
Convention de signe
Si au contraire on modélise en partant de l'alternateur vers le corps HP, le sens de rotation se retrouve opposé. Par souci d'exhaustivité et de généricité, il est nécessaire de pouvoir définir la vitesse de rotation positive et négative le long de chaque axe de rotation.
De la nécessité d’imposer un axe de rotation
Si l'on crée un modèle GTA avec les noeuds de l'abscisse ascendante en croisant les lignes d'arbre du carter HP vers l'alternateur, le sens de rotation de la machine est positif par rapport à l'axe utilisé. L'utilisateur avancé pourra choisir sa propre convention de signe (ie faire pivoter sa ligne d'arbre négativement par rapport à son axe de rotation) tout en s'assurant de la cohérence entre sa modélisation, sa saisie, son calcul et l'interprétation des résultats obtenus.
Conditions aux limites
Exemple du délignage paliers
Cela nous amène, par exemple, à pouvoir construire des diagrammes de Campbell ([U4.42.51] et [U4.52.52]) pour des vitesses de rotation négatives. Pour le calcul, en tenant compte de la chaîne, on charge l'échelle de hauteur des différents nœuds supports.
Exemple de conditions aux limites libre-libre et appuyé-appuyé
Pour les calculs sans tenir compte de la ligne de chaîne des essieux, un appui rigide est imposé au droit des roulements. Ces conditions aux limites pour le mouvement des nœuds porteurs (avec ou sans chaîne) sont implémentées à l'aide de l'opérateur DDL_IMPO.
Calcul des matrices élémentaires et assemblage
Matrices de raideur, de masse et d’amortissement mécaniques
MASS_ELE=CALC_MATR_ELEM(OPTION='MASS_MECA', MODEL=MODEL, CHAM_MATER=CHMAT, CARA_ELEM=CARELEM, CHARGE=CONDLIM,);. La matrice d'amortissement mécanique (dans les roulements) est générée de la même manière : AMOR_ELE=CALC_MATR_ELEM(OPTION='AMOR_MECA', . MODELE=MODEL, CHAM_MATER=CHMAT, CARA_ELEM=CARELEM, RIGI_MECA=RIGI_ELE, =CON_ELECA, CHARGEASS ,) ; .
Matrices gyroscopiques
Les contributions des matrices d'amortissement et de raideur gyroscopiques doivent être multipliées respectivement par la vitesse angulaire et l'accélération, exprimées en rad/s et rad/s/s, et sont combinées comme suit après assemblage avec les matrices d'amortissement et de raideur classiques par l'opérateur COMB_MATR_ASSE . Pour plus de détails sur l'utilisation de l'amortissement et de la raideur gyroscopique dans Code_Aster, le lecteur peut se référer à la documentation [U2.06.31]. Quatre grandes familles de calculs de limite forestière sont déjà possibles dans Code_Aster : 1) Calcul statique.
En plus des calculs sur base modale (validés avec des normes de type machine tournante à partir d'une base de tests), Code_Aster offre également la possibilité de calcul sur base physique (ce qui permet, le cas échéant, de corriger les biais liés à l'effet de raccourcissement modal) . Les opérateurs actuellement utilisés pour les calculs de type machine tournante sont l'opérateur de calcul modal (MODE_ITER_SIMULT), l'opérateur de calcul statique (MECA_STATIQUE), l'opérateur de calcul harmonique, les calculs dynamiques transitoires à base physique et les calculs dynamiques. transitoires de base modale (DYNA_VIBRA).
Calcul modal du système quadratique
- Calcul direct pour un faible nombre de degrés de liberté
- Calcul en 2 étages pour un grand nombre de degrés de liberté
- Exemple de génération d’une base modale utile
- Modélisation de l’amortissement en dynamique linéaire
- Autres opérateurs de calcul modal
Pour les analyses modales de base de systèmes comportant un grand nombre de degrés de liberté (plus de 300 degrés de liberté), il est nécessaire d'effectuer un calcul en deux étapes (appelé aussi calcul modal en coordonnées généralisées). Dans les calculs de la limite forestière, il est courant d'utiliser des calculs modaux de base dans le cadre de l'approche de réduction du modèle. A l'aide de l'opérateur MODE_ITER_SIMULT, nous calculons les modes pressés-comprimés conservateurs (c'est-à-dire sans prendre en compte ou non les matrices d'amortissement gyroscopiques) qui ont une fréquence inférieure à une valeur définie par l'utilisateur (ici 100 Hz).
Les deux bases modales libres ou pressées sont ensuite fusionnées à l'aide de l'opérateur DEFI_BASE_MODALE en une seule base de type RITZ. Outre l’amortissement assuré par les roulements hydrodynamiques, il existe une autre source d’amortissement dans les machines tournantes. Comme pour les études de machines tournantes, il est également d'usage de réaliser des analyses linéaires en effectuant des méthodes de réponse dynamique par recombinaison modale, avec une base modale de modes propres réels.
Dans ce cas, l'amortissement est utilisé pour la stabilisation numérique ou pour la simulation de résultats expérimentaux (repérage). Dans les opérateurs DEFI_BASE_MODALE, DYNA_LINE_HARM, DYNA_TRAN_MODAL et DYNA_VIBRA, les mots-clés AMOR_REDUIT et/ou LIST_AMOR permettent d'ajouter un amortissement réduit (pourcentages d'amortissement critique) pour les modes, même s'il s'agit à l'origine de modes vrais.
Calcul statique
MOD2ETAG=MODE_ITER_SIMULT(MATR_RIGI=R_pr_tot, MATR_MASS=M_pr_tot, MATR_AMOR=A_pr_tot, METHOD='QZ',. Dans le cas d'un calcul par sous-structuration dynamique, l'amortissement réduit est défini séparément pour chaque sous-structure opérateur DCRNAU.1_4ELEM Nous attirons votre attention sur les informations fins que d’autres opérateurs de Code_Aster puissent être utilisés pour le calcul modal.
Le calcul des efforts sur les appuis dans cette configuration se fait à l'aide d'opérateurs de post-traitement des résultats. L'obtention des résultats utilise les opérateurs de post-traitement CALC_CHAMP, avec l'option REAC_NODA permettant d'obtenir les efforts dans les appuis dans cette configuration.
Calcul de la réponse au balourd
- Définition d’un effort tournant de type balourd en harmonique
- Définition d’un effort tournant de type balourd en transitoire
- Calcul de la réponse harmonique au balourd
- Réponse harmonique sur base physique
- Réponse harmonique sur base modale
- Calcul de la réponse transitoire au balourd
- Réponse transitoire sur base physique
- Réponse transitoire sur base modale
- Calcul de ralentissement à vitesse imposée
On suppose également que le comportement de la machine est linéaire et que la structure est soumise à des charges harmoniques de même pulsation d'excitation. Nous supposons une charge synchrone avec la vitesse de rotation de la machine et effectuons la suppression des fréquences d'excitation (et donc de la vitesse de rotation) avec une étape de discrétisation. L’avantage de la réduction modale pour le calcul des harmoniques est donc limité par la rapidité d’un tel calcul.
Outre la composition de la base modale et la projection des matrices globales, il faut projeter les efforts mécaniques (déséquilibre dans ce cas). Le calcul de la réponse transitoire consiste à déterminer, en fonction du temps, la réponse d'une structure soumise à différents chargements. Contrairement au calcul de la réponse harmonique en régime permanent présenté dans le chapitre précédent, aucune hypothèse n'est faite ni sur les caractéristiques des charges appliquées ni sur l'allure de la réponse correspondante.
La modélisation de la décélération transitoire d'une machine tournante nécessite de prendre en compte la dépendance des matrices gyroscopiques d'amortissement et de raideur (options MECA_GYRO et RIGI_GYRO) et des forces de balourd de rotation sur la vitesse angulaire et l'accélération. Un exemple de la loi d'évolution linéaire de la vitesse de rotation A = (OMdeb*tfin-OMfin*tdeb)/(tfin-tdeb);.
Calcul de rotor fissuré
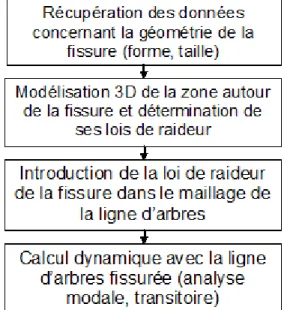
- Démarche
- Détermination de la loi de raideur de la fissure
- Introduction de la fissure dans le maillage
- Modification du fichier de commandes
- Détermination de la base modale
- Réalisation d'un calcul transitoire
Un calcul statique est ensuite effectué sur la bande pour déterminer la loi de rigidité des fissures ainsi que sa dérivée. L'insertion de la fissure dans le modèle se fait dans le fichier de maillage du rotor. La raideur de fissure 'raidmax' est choisie assez élevée par rapport à celle de la ligne d'axe (100 supérieure).
Les différents groupes de nœuds de la limite arborescente, où les conditions aux limites sont appliquées, sont décrits dans la figure 4.4.5-a. A ce niveau, la base modale, prenant en compte la présence d'une fissure, peut être calculée en combinant plusieurs configurations de « conditions aux limites » et de « géométrie » (Figure 4.4.5-b). Les lois d'évolution de la raideur et de ses dérivées sont lues et multipliées par ce coefficient géométrique.
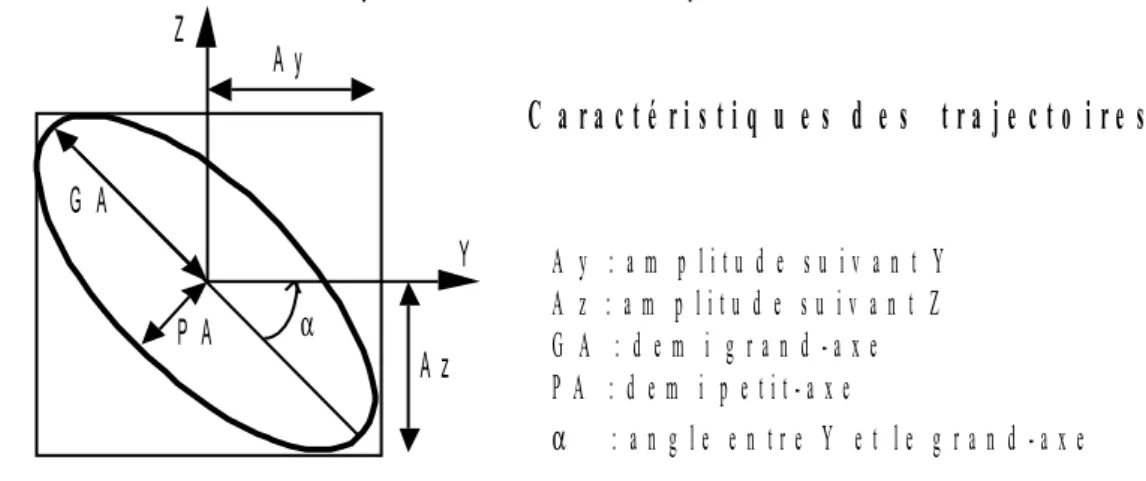
La solution du calcul temporaire, tenant compte de la présence de la fissure, se fait ensuite avec la commande DYNA_VIBRA. Il permet également de déterminer les caractéristiques de la trajectoire nodale pour une fréquence d'excitation donnée.
Sensibilités modales au balourd
La fissure est définie à l'aide du mot-clé ROTOR_FISS, les lois de rigidité (K_PHI) et sa dérivée (DK_DPHI) sont appelées dans ce mot-clé. Pour un calcul modal, Code_Aster permet de calculer la sensibilité modale au balourd ainsi que les coefficients de participation. Pour les calculs harmoniques, Code_Aster permet de tracer l'évolution de l'amplitude et de la phase d'un degré de liberté en fonction de la fréquence d'excitation, de tracer pour une fréquence d'excitation donnée la déformation du rotor et les trajectoires des ellipses des nœuds. .
Coefficients de participation
Calcul du rotor et de la participation massique pour le premier mode tot_pot1=tot_epot[1].
Détermination des phases et amplitudes en harmonique
Détermination des ellipses des rotors
Diagramme de Campbell
Tableau des cas-tests machines tournantes dans Code_Aster