Résoudre un problème de dynamique non linéaire nécessite d'abord de décrire les équations du problème continu, puis de présenter leur discrétisation spatiale, ici en éléments finis, et enfin de décrire la méthode d'intégration temporelle associée au traitement des non-linéarités matérielles et géométriques.
Discrétisation du problème de dynamique linéaire
Le système d'équilibre dynamique devient instable si l'on peut trouver une pulsation complexe dont la partie imaginaire est négative dont on peut annuler le déterminant.
Discrétisation du problème de dynamique non linéaire
- Terme d’inertie
- Amortissement
- Liaisons
- Problème dynamique discrétisé
- Conditions initiales
- Pilotage temporel implicite de chargements extérieurs
Surtout dans le cas de l'apparition de valeurs propres négatives de la matrice KT (par exemple en cas d'endommagement du matériau), l'amortissement peut devenir négatif et les instabilités se renforcent. Soit on accepte la matrice de rigidité déjà utilisée pour les efforts internes (comme dans les versions précédentes du code), soit on précise l'utilisation de la matrice élastique.
Prise en compte d’un état initial précontraint
Problèmes couplés fluide-structure vibro-acoustique
Puisque l'on considère une frontière commune fluide-structure ∂ FS, où l'on définit la normale n sortant du domaine structural vers le fluide, la charge de paroi fluide est liée au déplacement de la structure. C’est la seule conséquence de la gravité qui puisse être considérée dans cette formulation.
Prise en compte de lois de comportement visqueux et amortissement
Le fluide doit rester en petits mouvements (hypothèse de base de cette modélisation), mais on peut envisager de grands mouvements de la structure baignée par le fluide via une mise à jour de la géométrie COMP_INCR, opérande DEFORMATION : 'PETIT_REAC', valable si notre petit considère les rotations) des frontières ∂FS, provoquant le recalcul du terme MFS.
Généralités
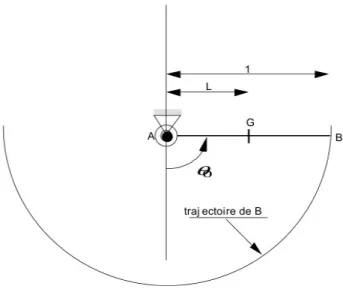
Ua=0, auquel on veut imposer le déplacement absolu Ua de la structure (par exemple, connexions internes comme "3D_POU"...) à laquelle sont rattachés leurs paramètres de LAGRANGE λL. Ve l'espace vectoriel des champs de déplacement de la structure-uent "entraînée", de dimension finie Ns, que nous définirons ci-dessous.
Décomposition par relèvement élastostatique
Cas MONO_APPUI et MULTI_APPUI
Il en est de même si l'on veut reconstruire l'ensemble de la solution pour un post-traitement en contraintes avec leur contribution dite « secondaire » liée à Ue= Udk t k. Dans le cas du « NON », le problème dynamique ne peut être considéré que dans un référentiel absolu.
Schéma de NEWMARK
Plaçons-nous au temps t=ti−1 et écrivons l'équilibre [éq 2.2.4-1] après discrétisation spatiale au temps ti=ti−1t, de préférence avec les éléments complémentaires donnés en [éq 2.2-6] . On note Ui=U ti les degrés de liberté au nouvel instant et en utilisant les termes du diagramme temporel [éq 3.1-4] et [éq 3.1-3], on arrive au système d'équilibre dynamique non linéaire . . 6], les équilibres dynamiques sont vérifiés aux instants ti−1 et ti, tandis que les dérivées sont des combinaisons déterminées par le schéma de Newmark [éq 3.1-1] et [éq 3.1-2].
Phase de prédiction
Pas de temps général
Le terme L au deuxième alinéa de [éq 3.1-10] apparaît en présence de joints absorbants d'un liquide ou d'un solide (formulation élastique), voir [§ 2.6]. Puisque la matrice K est établie par [éq 3.1-9], cette nouvelle matrice Ki−1 est combinée avec la matrice. On vérifie sur [éq 3.2.1-4] que si la matrice tangente Ki−1 est singulière (dans le cas d'un mode rigide, d'un matériau endommagé ou d'une plaque ductile, etc.), la dynamique est contrôlée par les forces d'inertie , et que, puisque la matrice K est généralement régulière (voir note faite au [§ 3.1]), on trouve néanmoins un prédicteur Ui0, à condition que la précision dans la matrice K ne le fasse pas.
Premier pas de temps
Phase de correction par la méthode de NEWTON
Dans le cadre de la mise à jour PETIT_REAC, ce terme n'est pas présent dans le calcul de la matrice tangente. La matrice KiMn estla matrice d'application linéaire tangente de la partie « forces d'inertie » du système d'équations non linéaires [éq 3.1-8] qui est donc valide. On vérifie sur [éq 3.3-1] que si la matrice tangente Kin est singulière (dans le cas d'un matériau endommagé ou d'une plaque ductile…), la dynamique est contrôlée par les forces d'inertie, et que, puisque la matrice K est régulier, on retrouve quand même un correcteur Uin1 (comme si on était en situation de chute libre, par exemple).
Mise à jour
Le premier terme est la contribution du comportement comme dans les petites transformations, à la différence que cette contribution est ici évaluée dans la configuration courante. Le deuxième terme est l’apport de la géométrie qui n’est pas présent dans les petites transformations. Après que chaque itération de NEWTON ait établi une solution candidate de [éq 3.3-1] sans vérifier le critère de contact, nous lançons l'algorithme de contrainte active pour satisfaire les conditions de contact : nous corrigeons donc Uin1.
Critère d’arrêt
Pour les autres algorithmes de frottement de contact dans Code_Aster, comme ceux utilisés par les éléments "chocs" discrets (DIS_CHOC), cf. Le dénominateur de [éq 3.5-1] est une norme de la charge à l'instant ti à laquelle on rapporte le numérateur , ce qui est une norme pour les forces qui ne sont pas (encore) équilibrées. Comme en statique, il faut insister sur la bonne convergence car sinon les estimations des forces internes et des réactions de contact qui vérifient le comportement contact-frottement et les relations de connexion s'éloigneront de l'équilibre et ce n'est pas une force d'inertie MUin .U¨in pour loin de la valeur "exacte", qui suffira à produire une bonne réponse dynamique transitoire au prochain pas de temps.
Propriétés du schéma de NEWMARK
Généralités
Schéma du second ordre en temps, pas de dissipation numérique en l'absence d'amortissement matériau : donc pas d'atténuation d'amplitude due au schéma. Le schéma NEWMARK est du second ordre en temps (au pire) si et seulement si γ =1 / 2. Si l'on choisit 1/2, le schéma NEWMARK fournira un amortissement numérique négatif qui conduira à une instabilité.
Schéma d’accélération moyenne ou règle du trapèze
Les propriétés du schéma de Newmark obtenues dans le cas de l'oscillateur à 1 degré de liberté peuvent être généralisées au cas du système dynamique linéaire à différents degrés de liberté (en utilisant une projection sur une base modale), à condition que l'opérateur d'amortissement soit proportionnel aux opérateurs pour une masse et une rigidité réduites. On sait que le schéma de Newmark introduit une erreur notable dès qu'une rotation non infinitésimale intervient dans la réponse dynamique du solide. De plus, le schéma de Newmark peut également générer une erreur si l'on intervient trop « brutalement » sur les variations de paramètres (pas de temps, ou ) dans la séquence de la discrétisation temporelle sur la durée du transitoire.
Point de vue énergétique
Propriétés du schéma de NEWMARK pour les problèmes non linéaires
Choix des pas de temps
Nous n’avons pas de résultat général avec ce type de choix en termes de convergence. Cependant, un pas de temps « trop petit » peut exacerber les oscillations provoquées par la discontinuité. Cependant, il est conseillé de maintenir le pas de temps constant pendant une phase stationnaire de la réponse dynamique linéaire, afin de conserver les propriétés énoncées précédemment.
Motivation
L'incrément de déplacement gt2/2 pendant ce pas de temps est donc petit par rapport aux dimensions du solide, ou au contraire équivalent à un déplacement élastique sous un champ appliqué de même grandeur. Il est possible d'effectuer plusieurs analyses dynamiques en séquence sur des intervalles de temps successifs, communiquant par itérations en choisissant comme état initial le résultat de la dernière étape précédemment examinée, selon des pas de temps bien distincts conformément à l'idée a priori que l'on a la réponse du système étudié. On sait également que le traitement des collisions est sensible au timing des pas de temps par rapport aux instants « réels » du choc : il faudra étudier la sensibilité de la réponse obtenue.
Schéma HHT et méthode d’accélération moyenne modifiée
Dans Code_Aster, on peut utiliser les deux variantes suivantes avec le mot clé facteur SCHEMA_TEMPS (SCHEMA='HHT'). En revanche, en optant pour le mot-clé simple MODI_EQUI='OUI', cela revient à adopter le diagramme HHT complet présenté ci-dessus avec le déplacement des termes de force interne et externe. Avec le diagramme HHT complet (HHT avec MODI_EQUI='OUI'), nous traitons les termes issus des déplacements imposés comme dans le cas du diagramme d'accélération moyenne (HHT avec MODI_EQUI='NON').
Propriétés du schéma d’accélération moyenne modifiée
La figure [Figure 5.3-a], extraite de [bib5], donne les variations de l'atténuation numérique en fonction de t. 1.la "règle du trapèze" (=0) est attractive car elle ne fournit pas d'amortissement numérique pour un système qui n'est pas physiquement amorti, cf. La figure [Figure 5.3-b], également extraite de [bib4], donne les variations de l'erreur relative en période en fonction de t.

Propriétés du schéma HHT
Définition du -schéma
Le diagramme , dans lequel les équations dynamiques sont exprimées en vitesse d'impulsion, avec conditions aux limites de Dirichlet dualisées, ici dans le cas linéaire, avec des forces d'amortissement visqueuses, est écrit à partir des valeurs des champs prises aux instants tk. L'écriture ci-dessus, capturée dans le cas linéaire-élastique, s'adapte au sein de la méthode de Newton pour les cas non linéaires, de la même manière que ce qui a été fait pour le schéma de Newmark, voir [§ 3]. Le critère d'arrêt de la méthode de Newton avec ce schéma est réalisé de manière analogue à l'expression [éq 3.5-1], sauf qu'il est écrit en terme d'équilibre en quantité de mouvement, où le dénominateur est également exprimé en quantité de mouvement.
Propriétés du -schéma
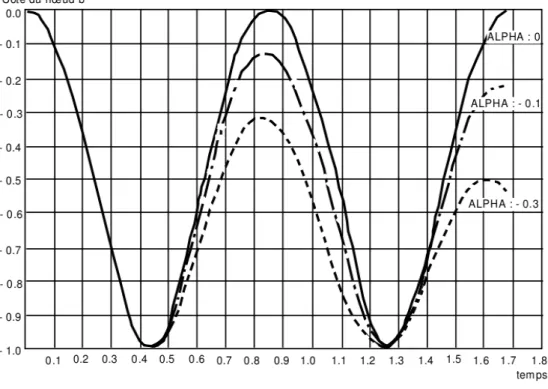
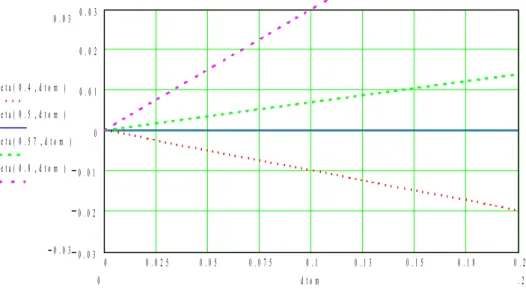
On voit donc que si θ 0,50, alors le coefficient d'amortissement numérique est localement négatif pour les faibles valeurs de .t (schéma instable) et si 0,50 alors le coefficient d'amortissement numérique est localement positif pour les faibles valeurs de . En étudiant la dépendance de ces valeurs propres et du coefficient d'amortissement numérique en fonction du choix de et de la valeur de .t, on constate donc que. On suit ci-dessous les courbes représentant l'évolution du coefficient numérique d'amortissement en fonction de .t, pour différentes valeurs de.
Présentation générale
Toujours dans le même cadre théorique, l'auteur a également proposé l'introduction d'un modèle numérique d'amortissement plus complexe, qui permet de maintenir l'ordre 2 et d'avoir un aspect caractéristique, selon la fréquence, proche de l'amortissement du diagramme HHT complet. Mais là aussi, le système d’équations ne peut pas être simplement découplé et nous sommes obligés d’introduire deux vecteurs d’inconnues supplémentaires. Notre objectif étant de respecter le framework Code_Aster le plus simplement possible, toute résolution en vecteur d'état est interdite, sans compter les surcoûts en occupation mémoire qui en résulteraient (doublement du nombre de degrés de liberté).
Algorithme de résolution
- Résolution en incrément de déplacement
- Comparaison avec le -schéma en incrément de déplacement
- Résolution en incrément de vitesse
- Comparaison avec le -schéma en incrément de vitesse
- Analogie entre les deux schémas numériques
Le découplage de l'équation en un vecteur d'état s'applique toujours et à chaque pas de temps, nous relions les étapes de résolution suivantes entre elles. En effet, pour l’étude de la stabilité d’une méthode d’intégration, le système d’inconnues est placé sous la forme d’un problème vectoriel d’état. On peut faire un commentaire sur l'accélération : le schéma de Krenk n'impose pas explicitement de méthode de calcul de l'accélération, tout comme le schéma (contrairement aux schémas comme Newmark ou HHT).
Bilan énergétique
Une solution pourrait être, à la fin de chaque étape, d'inverser la matrice de masse dans l'équation d'équilibre (écrite au dernier pas de temps) pour obtenir l'accélération. Dans tous les cas, l'accélération restera une approximation et donc son utilisation en post-traitement ne sera pas recommandée. De même, si l’on veut poursuivre avec un autre schéma utilisant directement l’accélération, comme la famille Newmark, toute approximation de l’accélération risque d’introduire une erreur.
Implantation du schéma de Krenk dans Code_Aster
Alors que pour le schéma , cette intégration se fait en considérant un effort constant sur l'intervalle de temps et égal à celui à l'instant tn= tn tn. Ces modèles, contrairement aux modèles implicites, sont conditionnellement stables : il existe une limite de temps qui ne peut être dépassée sous peine de divergence. Cependant, il convient de noter que par rapport à une solution avec un schéma implicite, les approches explicites coûtent beaucoup moins cher sur un pas de temps.
Le schéma des différences centrées
Ces schémas sont bien adaptés aux problèmes de dynamique rapide où l'on cherche à analyser les phénomènes de propagation des ondes. En effet, même si implicitement nous devons effectivement résoudre le système ajusté global de grande dimension à chaque étape (voire à chaque itération non linéaire), nous évitons explicitement cette inversion très coûteuse en utilisant un opérateur diagonal (basé uniquement sur la matrice de masse, donc qui ne ne nécessite pas de mise à jour : avec le mot clé MASS_DIAG = 'OUI'). Avec un schéma clair, on ne peut résoudre qu'à la hâte (mot-clé FORM = 'SPEED').
Le schéma de Tchamwa-Wielgosz [bib36]
Performance des schémas explicites dans Code_Aster
Calculs explicites sur base de Ritz avec sous-domaines dans Code_Aster
A chaque pas de temps, nous évaluons et ajoutons des termes complémentaires issus de la condensation dynamique, cf. Il est possible de saisir le coefficient coef après l'opérande COEF_MASS_SHIFT dans le mot clé SCHEMA_TEMPS pour effectuer un "décalage" de la matrice de masse M, qui devient. La matrice de rigidité utilisée pour ce « déplacement » est en pratique celle calculée lors de la phase de prédiction de l'algorithme de Newton.

![Figure 6.2-b : Coefficient d’amortissement numérique en fonction de . t ∈ [ 0.0 , 0.4 ] , pour](https://thumb-us.123doks.com/thumbv2/9docorg/12387438.0/44.892.157.684.808.1089/figure-6-2-coefficient-amortissement-numérique-fonction-0.webp)
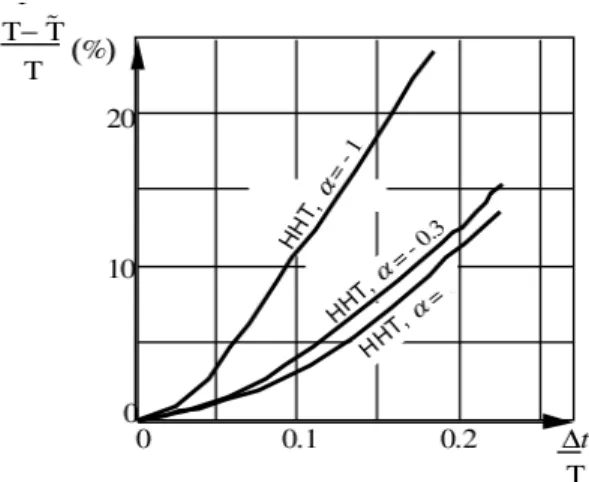
![Figure 6.2-c : Erreur en fréquence en fonction de . t ∈ [ 0 . 0, 0 . 2 ] , pour](https://thumb-us.123doks.com/thumbv2/9docorg/12387438.0/45.892.158.818.248.363/figure-6-2-erreur-fréquence-fonction-0-0.webp)