François Miralles et Jean-François Olivier étaient principalement responsables de la mise en place de l'interface graphique du banc d'essai, du logiciel de simulation, de la conception et du développement des tests, ainsi que de la rédaction du rapport. Cette étude fait référence à un système de guidage assisté qui permet au conducteur de simplifier les manœuvres nécessaires pour garer un tracteur avec une remorque dans un espace limité. Le système de contrôle est conçu à l'aide de techniques récemment proposées dans la littérature scientifique dans le cadre du contrôle de véhicules articulés.
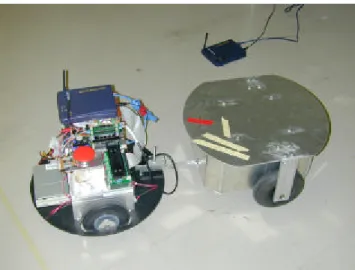
Le banc d'essai est centré sur un robot mobile développé au sein du Laboratoire d'automatisation et systèmes automatiques de l'École Polytechnique de Montréal et sur un environnement informatique de contrôle temps réel basé sur des cibles Matlab, Simulink et XPC. Ce rapport fait partie d'un ensemble d'études sur le guidage des véhicules réalisées depuis plusieurs années au sein du Laboratoire d'Automatisation et Systèmes. Dans ce qui suit, nous considérons un système de direction assistée qui permet de simplifier l'exécution par le conducteur des manœuvres nécessaires pour garer un semi-remorque dans une zone limitée.
Ce système de guidage a été développé à l'aide de techniques récemment proposées par Bolzern, DeSantis et Locatelli dans le contexte des véhicules articulés directeurs. La référence citée fournit la description détaillée de la famille d’algorithmes qui a servi de base au développement de l’algorithme mis en œuvre pour atteindre notre objectif. Rappelons simplement qu'il s'agit d'un certain nombre d'algorithmes qui permettent de faire suivre à un véhicule articulé autonome une trajectoire assignée (un cercle ou une ligne droite) à une vitesse assignée en avant ou en arrière.
La mise en œuvre a été réalisée à l'aide du progiciel Toolbox xPC Target de Matlab [2] et à l'aide d'un robot mobile installé dans le Laboratoire d'automatisation et de systèmes [3].
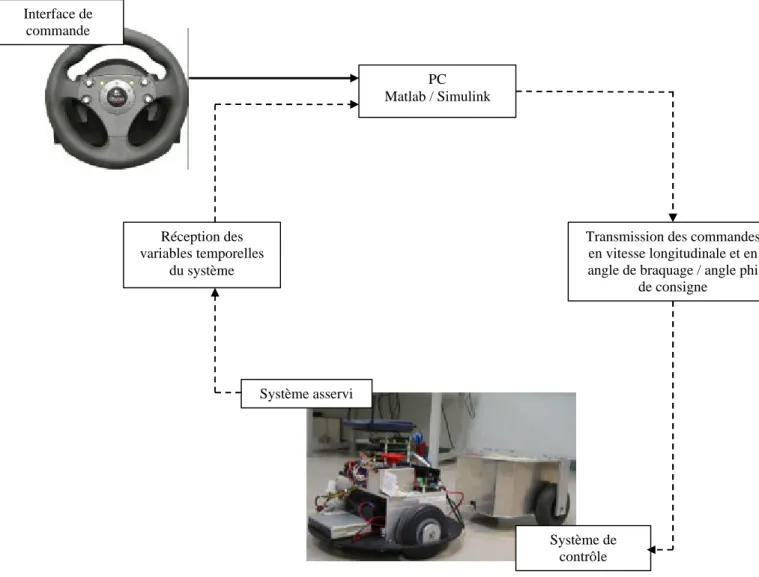
Système asservi
La connexion entre l'ordinateur de bord (serveur) et l'ordinateur émetteur des commandes (client) s'effectue via un réseau sans fil selon la norme i802.11b. 8 La communication entre le robot et le module de contrôle se fait via le protocole TCP/IP. Cependant, les calculs sur le robot sont effectués de manière synchrone conformément aux possibilités offertes par l'environnement temps réel de xPC Target.
Système de contrôle
Interface de commande et de visualisation
MODELISATION ET IDENTIFICATION DU SYSTEME ASSERVI
Modélisation
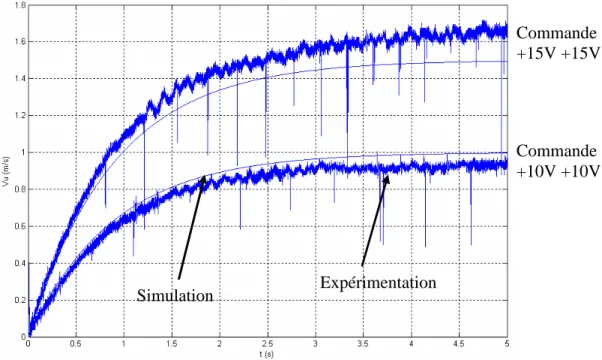
10 désignera v(s) dans le domaine de Laplace, et la vitesse linéaire requise par le système de contrôle (également appelée poussée), notée U1(s), s'écrit. Où Kvet τv sont respectivement le gain statique et la constante de temps de translation dont les valeurs ont été déterminées par identification. La deuxième fonction de transfert, qui relie la vitesse angulaire obtenue ω(s) et la vitesse angulaire requise (également appelée contrôle) U2(s), est écrite.
Où Kω et τω sont respectivement le gain statique et la constante de temps de rotation, dont les valeurs ont également été identifiées plus tard. Le deuxième module concerne la cinématique du tracteur-remorque dont les paramètres géométriques et variables sont définis dans la figure suivante.
Identification du système asservi
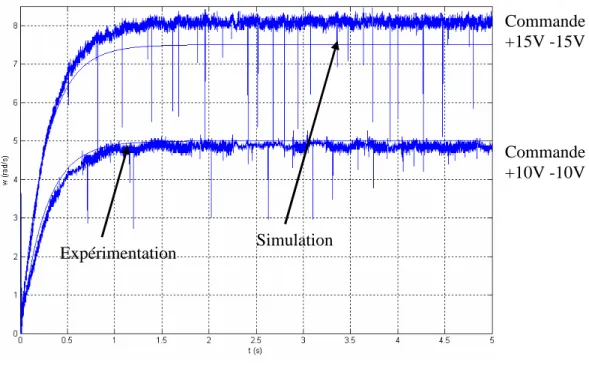
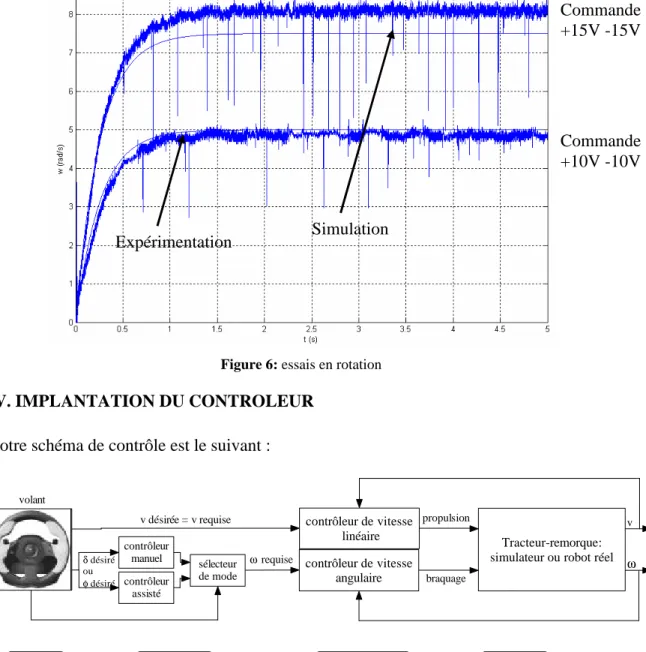
D'après la figure 5, nous pouvons voir que les résultats de la simulation sont en bon accord avec l'expérience pour la plage de vitesses qui sera utilisée plus tard. Nous avons déterminé les paramètres de la fonction de transfert rotatif de la même manière, cette fois avec des séquences inversées. Les résultats coïncident à nouveau avec la simulation, comme le montre la figure 6.
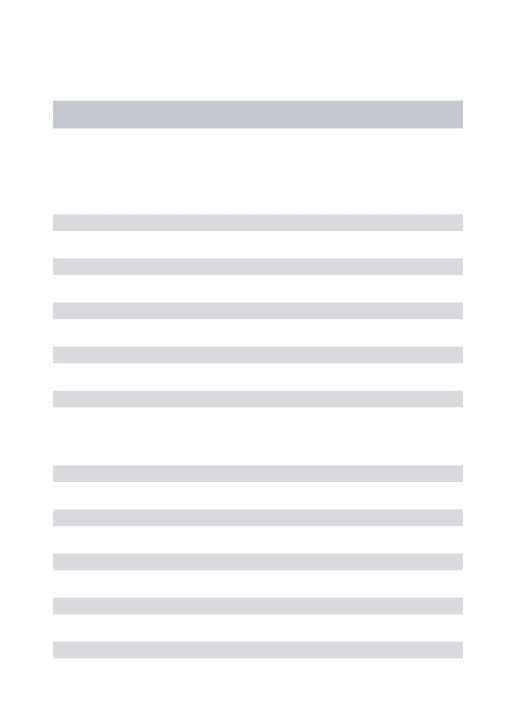
IMPLANTATION DU CONTROLEUR Notre schéma de contrôle est le suivant
Contrôle manuel
Le régulateur de vitesse veille alors à ce que les vitesses atteintes par la remorque se rapprochent des valeurs souhaitées. Ce type de direction est classique et fonctionne très bien pour le tracteur, le problème est qu'il n'assure pas la stabilité du tracteur en marche arrière.
Contrôle assisté
Ce dernier assure que les vitesses obtenues du semi-remorque convergent vers les valeurs souhaitées comme dans le cas d'une commande manuelle. Cette commande est au cœur du projet et nous tenterons de montrer tant par la simulation que par la pratique qu'elle est fonctionnelle et surtout qu'elle aide le conducteur en marche arrière.
SIMULATION ET EXPERIMENTATION
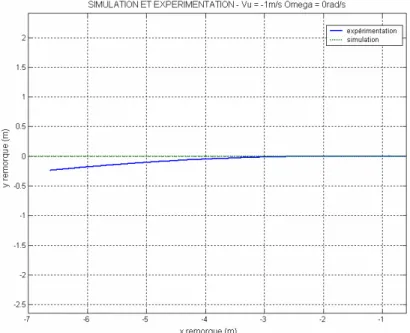
Comparaison des résultats en simulation et en expérimentation
Ce test a été réalisé avec une consigne de vitesse constante de -1 m/s et un angle de braquage également constant à 35° comme consigne d'entrée. On observe alors un cercle réel avec un rayon plus grand, puisque le robot réel tourne moins vite que le robot simulé. L'algorithme d'assistance permet d'avoir une trajectoire formée d'une ligne droite et d'un arc de cercle si vous suivez certaines instructions de pilotage avec le volant.
Ainsi, puisque le modèle diffère du système réel, la même action n’aura pas le même effet pour tout le monde. Le système de contrôle ne semble apparemment pas pouvoir corriger la différence de comportement des moteurs ou des roues (le problème n'a pas été clairement identifié, puisque le robot en est encore aux premiers tests).
Efficacité du contrôle assisté
Huit personnes ont participé à notre expérience et à chaque fois nous avons enregistré le temps de stationnement et le nombre de manœuvres effectuées, en comptant une manœuvre supplémentaire à chaque fois que le véhicule avance et recule. Tout d'abord, il faut en moyenne cinq à six fois plus de temps pour se garer en mode manuel, puis il est impossible de se garer en une seule manœuvre en mode manuel, alors qu'en mode assisté c'est presque toujours le cas. En effet, avec le mode assisté, vous pouvez vous garer sur une trajectoire courbe en allant assez vite comme vous pouvez le voir sur le schéma de la zone de stationnement, tout comme en allant en avant ; les conducteurs qui ont effectué deux manœuvres pour se garer ont mal ciblé la zone située entre les sièges, cela n'est pas dû à une défaillance du contrôle.
En revanche, pour se garer en mode manuel, il faut aller beaucoup plus lentement afin de pouvoir contrecarrer efficacement les réactions de la remorque. L'erreur de certains conducteurs était de vouloir entrer directement dans le parking car la remorque tournait immédiatement sur le côté. L'une des meilleures trajectoires à suivre en mode manuel et affichée dans le diagramme de la zone de stationnement.
En effet, il faut essayer de revenir tout droit, puis se réorienter en avant, et enfin revenir en ligne droite jusqu'au parking. Un système d'assistance à la direction pour tracteur-remorque développé selon l'approche récemment proposée à Bolzern, DeSantis et Locatelli 2001 a été implanté sur un banc d'essai constitué d'un robot mobile développé au sein du Laboratoire d'automatisation et systèmes de l'École Polytechnique de Montréal. Les résultats de simulation et expérimentaux que nous avons obtenus ont permis de : 1) prouver l'efficacité pratique de l'approche théorique adoptée ; 2) démontrer l'utilité du système de direction assistée par ordinateur pour effectuer les tâches de stationnement d'un semi-remorque.
Ces différences, dues principalement à la présence dans le robot de forts frottements dans les roues, ainsi que d'asymétries notables tant au niveau des moteurs que des roues, n'ont pas empêché la supériorité de la commande assistée sur la commande manuelle lors des manœuvres de stationnement en marche arrière. avec une remorque. Demers-Roy, C., Conception matérielle et logicielle d'un robot mobile destiné au prototypage rapide d'algorithmes de contrôle, Rapport interne du Laboratoire d'automatisation et de systèmes, École Polytechnique de Montréal, juin 2003 (22 pages). De Santis, R.M., Benon, L., Hurteau, R., Gressani, L., Autonomous Execution of Circular or Rectilinear Maneuvers by a Tractor-Trailer, 3e Conférence internationale sur l'automatisation industrielle, Montréal, juin 1999.
De Santis, R.M., Hurteau, R., Leroy, J., Route Control of a Tractor-Trailer: A Comparative Study of Different Controllers, 3e Conférence internationale sur l'automatisation industrielle, Montréal, juin 1999. Au cours des expériences, nous avons remarqué que même dans En boucle fermée, le véhicule ne pouvait pas suivre une trajectoire en ligne droite avec une consigne de direction nulle et une vitesse d'environ 1 m/s. Rappelons que notre boucle fermée était composée d'un contrôleur PID pour la vitesse longitudinale et d'un autre contrôleur PID pour la vitesse de rotation.
Pour une trajectoire en ligne droite, le signal de vitesse de rotation, en théorie nulle, est très bruité. On voit que cet écart continue d'augmenter au cours du trajet pour atteindre un écart de 0,5 rad soit une quarantaine d'impulsions après un trajet de 3,80 m.