INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA SECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN.
ANÁLISIS DE POSICIÓN, VELOCIDAD Y FUERZAS DE UN
MECANISMO DE RETORNO RÁPIDO DE WHITWORTH
TESIS
QUE PARA OBTENER EL GRADO DE:
MAESTRO EN CIENCIAS
CON ESPECIALIDAD EN
INGENIERÍA MECÁNICA
PRESENTA
ING. JONATHAN RUIZ HIDALGO
DIRECTOR:
M. en C. CANDIDO PALACIOS MONTUFAR
DIRECTOR:
DR. JUAN ALEJANDRO FLORES CAMPOS
RESUMEN
En este trabajo de investigación se muestran distintos métodos para la formulación de modelos para describir a los mecanismos de lazo cerrado, y como pueden estos métodos facilitar su implementación computacional.Con la intención de que los modelos obtenidos permitan una implementación sencilla de los esquemas de control. Se plantea además que al utilizar técnicas de balanceo con un enfoque de diseño mecánico basado en el control se pueden eliminar o reducir efectos de algunos términos del modelo matemático, ayudando aún más a facilitar el algoritmo de control.
Este trabajo inicia desde un enfoque de control y termina en un enfoque mecánico. Esto es, se parte de estudios realizados en el área de control y computación para presentar los modelos que pueden facilitar el planteamiento de los sistemas mecánicos, para después presentar técnicas que reduzcan dichos modelos y por tanto facilitar la implementación de algoritmos de control.
Los métodos planteados en la formulación de los modelos de sistemas mecánicos se utilizan para describir un mecanismo de lazo cerrado de retorno rápido, que tiene la cualidad de presentar una no linealidad debido a la aceleración de coriolis entre sus eslabones. El modelo es validado utilizando un software de simulación y programando cada una de las ecuaciones.
ABSTRACT
This research work shows different methods for the formulation of models to describe the closed-loop mechanisms, and how can these methods provide aneasier way for a computational implementation. With the intention that the models founded allow a simple implementation of control schemes.It also raises that by using balancing techniques with a focus on mechanical design based on control, it could be posible to eliminate or reduce the effects of some terms of the mathematical model, further helping to facilitate the control algorithm.
This work starts from the viewpoint of control and ends in a mechanical approach. That is, it starts from studies in the area of computer and control and shows the models that can facilitate the approach of mechanical systems, then it proposes techniques that could reduce these models and thus facilitate the implementation of control algorithms.
The methods outlined in the formulation of models of mechanical systems are used to describe a closed loop quick return mechanism, which has the quality to have a nonlinearity due to the Coriolis acceleration between the links. The model is validated using simulation software and programming each one of the equations.
SEÑOR, te doy las gracias de todo mi corazón, de toda mi alma, de todo mi ser. Porque día a día cambias mi mundo, lo haces florecer. Gracias Papito hermoso porque me buscaste y no dejaste que me apartara. Porque en mis días de cansancio me levantabas, me platicabas, me instruías. Creaste un espacio y un tiempo para nosotros. Te agradezco porque puedo confiar en ti. Porque conozco tu amor. Porque las veces que mi corazón se rendía tú me animabas. Me sacaste de la locura y me diste un corazón entendido. Porque veo a los que tú me diste y me siento muy feliz al verlos sonreír. Gracias por ese regalo. Te doy gracias por estar ahí siempre. TE AMO SEÑOR. Y en este trabajo quiero decirte que eres el motor de mis días y cada objetivo que alcanzo veo tus manos que me guían. GRACIAS SEÑOR.
Princesa hermosa, mi gran tesoro, sin ti no hubiera llegado tan lejos. Mi compañera, mi amada. Gracias corazón por creer en mí, por dar tu tiempo, tu amor, tu esfuerzo, tu valentía y tu enorme corazón por nosotros. Gracias porque cuando veo las cosas perdidas siempre encuentro un apoyo incondicional en ti. Apostaste por mí en las condiciones más adversas con una sonrisa sabiendo que lo íbamos a lograr. Este triunfo es nuestro princesa y gracias a DIOS vamos a tener muchos más. Es hermoso saber que al enfrentar al peor enemigo hay alguien especial que ira contigo hasta el final aun sabiendo que en tal proeza la vida vaya de por medio. TE AMO corazón por lo que eres, mi mejor amiga, mi esposa, mi dulce hogar.
A mis padres y mi hermano, mis héroes de mil batallas. Gracias porque siempre han tenido un oído cerca, un abrazo fuerte y palabras para vencer a ejércitos. Gracias por su amor, por su dedicación por sus cimientos, por cuidar a la semilla, cuidarla y alegrarse por verla florecer. Gracias por su esfuerzo, por sus días de desvelo, por sus preocupaciones, por hacerme el hombre que soy. Anhelo que mis hijos tengan tanta dicha como la tengo yo de tenerlos cerca. LOS AMO.
A mis suegros y familia Sánchez Colín
Gracias, por adoptarme en sus corazones y tenderme su mano para caminar, por su confianza, apoyo y amor. Porque he encontrado un lugar seguro a donde querer volver con alegría. Gracias por su paciencia y atención. Este triunfo también es suyo, mi familia. LOS AMO.
A mis profesores, quiero agradecerles su pasión por enseñar, su animó y sus exigencias para verme crecer. Los días que pase en esta institución fue un reto impresionante. Gracias por forjar mi carácter y ayudar a derrotar mis propias limitaciones.
i
ÍNDICE
ÍNDICE GENERAL i
Índice de Tablas y Figuras v
Simbología xiii
Objetivo xxxiii
Justificación xxxv
I ESTADO DEL ARTE 1
1.1. Evolución de la Mecánica 3
1.2. Breve historia del control automático 7
1.3. Mecatrónica 11
1.4. Mecanismos desde un punto de vista mecatrónico 15
II ANÁLISIS CINEMÁTICO 21
2.1. Grados de Libertad 23
2.2. Sistema de Coordenadas 27
2.3. Restricciones cinemáticas 31
2.4. Uniones en sistema multicuerpo 33
2.5. Cinemática Directa 43
2.5.1 Análisis de Posición 43
2.5.1.1 Restricciones de Unión 43
2.5.1.2 Restricciones de Conducción 53
2.5.1.3 Restricciones Holónomas 59
2.5.2 Análisis de Velocidad 61
2.5.3 Análisis de Aceleración 67
2.5.4 Cinemática de los CM 73
2.6. Coeficientes de Velocidad y Aceleración 79
ii
III ANÁLISIS DINÁMICO 83
3.1. Energía Cinética 85
3.2. Energía Potencial 89
3.3. Ecuación de Lagrange 91
3.4. Formulación de Coordenadas 93
3.5. Fuerzas de restricción 95
3.6. Parámetros reducidos EKSERGIAN 97 3.7. Método de los multiplicadores de Lagrange (DAEs) 101 3.7.1 Método utilizando coeficientes de velocidad 113 3.7.2 Método utilizando ecuación cinemática 115
3.8. Trabajo virtual 117
3.9. Fuerzas externas 119
3.10. Cálculo de reacciones 123
IV SÍNTESIS CINEMÁTICA 139
4.1. Máquina Herramienta: Cepillo 141
4.2. Especificaciones de diseño 147
4.3. Síntesis cinemática 149
4.4. Clasificación de la síntesis cinemática 151 4.5. Condiciones de diseño en la síntesis cinemática 155 4.6. Síntesis cinemática del mecanismo de Whitworth 159
4.6.1 Manivela-Biela-Corredera 161
4.6.2 Ventaja mecánica 163
4.6.3 Modelo cinemático 165
4.6.4 Inversión cinemática 169
4.6.5 Mecanismo de retorno rápido 171
4.6.6 Dimensionamiento del mecanismo de retorno rápido 173
V DISEÑO PARA CONTROL 183
5.1. Diseño Mecatrónico 185
5.2. Diseño para control 189
5.3. Balanceo en los mecanismos 191
5.4. Fuerzas y momentos de inercia 195 5.5. Fuerzas de inercia en un rotor 199 5.6. Fuerzas y momentos de sacudimiento en un rotor 201
5.7. Balanceo en un rotor 203
5.8. Fuerzas y momentos de sacudimiento en un mecanismo 207
5.9. Balanceo en un mecanismo 209
5.10. Balanceo en un mecanismo manivela-biela-corredera 211
iii
CONCLUSIONES xxxvii
Trabajo a futuro xxxix
REFERENCIAS. ANEXOS BIBLIOGRAFÍA
iv
v
TABLAS Y FIGURAS
CAPÍTULO 2CAPÍTULO 2
TABLAS
2.1 Pares Inferiores
FIGURAS
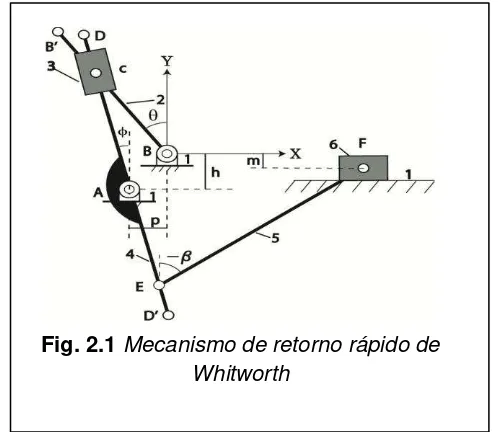
2.1 Mecanismo de Retorno rápido de Whitworth 2.2 Coordenadas Relativas
2.3 Coordenadas de punto de referencia 2.4 Coordenadas Naturales.
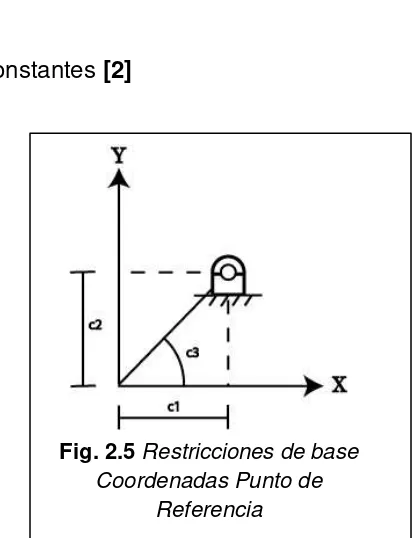
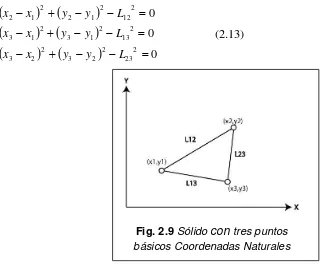
2.5 Restricciones de Base Coordenadas Punto de Referencia 2.6 Restricciones de Revoluta Coordenadas Punto de Referencia 2.7 Restricciones prismáticas Coordenadas Punto de Referencia 2.8 Sólido con dos puntos básicos Coordenadas Naturales 2.9 Sólido con tres puntos básicos Coordenadas Naturales
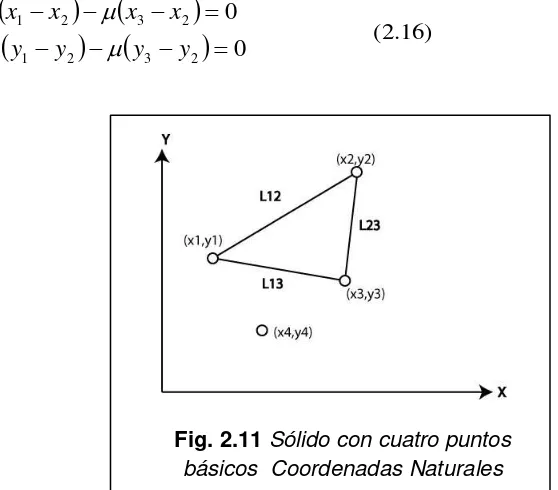
2.10 Sólido con tres puntos básicos co-lineales Coordenadas Naturales 2.11 Sólido con cuatro puntos básicos Coordenadas Naturales
2.12 Restricción prismática Coordenadas Naturales
2.13 Restricción prismática especial Coordenadas Naturales 2.14 Restricción de ángulo Coordenadas Mixtas
2.15 Restricción de distancia coordenadas Mixtas 2.16 Mecanismo de Whitworth
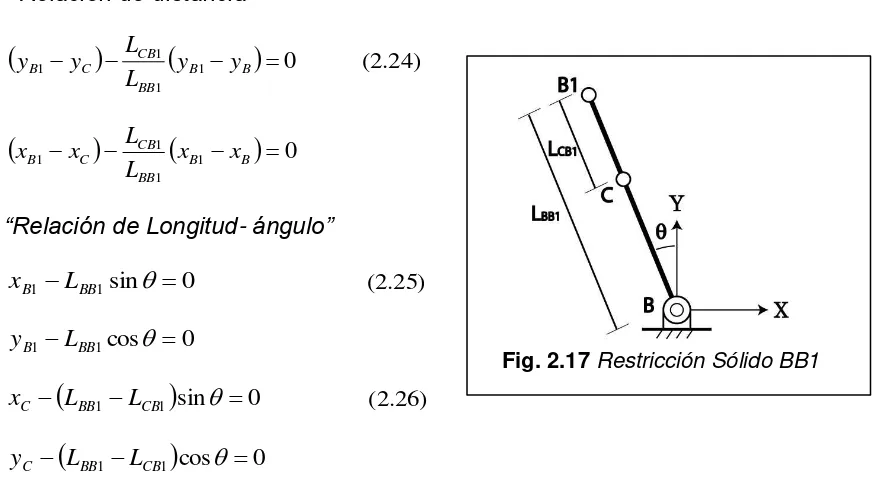
2.17 Restricción Sólido BB1 2.18 Restricción Sólido DD1 2.19 Restricción Sólido EF 2.20 Mecanismo de Whitworth 2.21 Lazo I
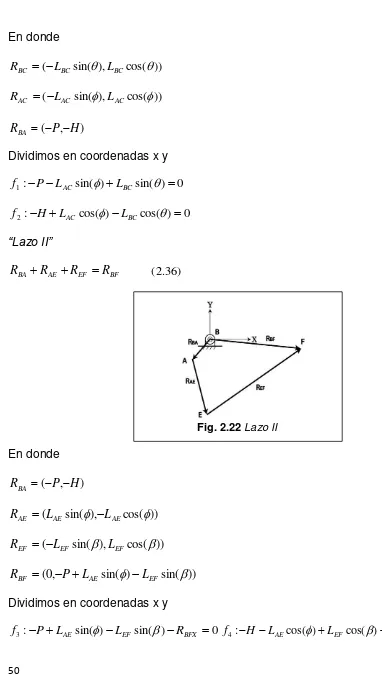
2.22 Lazo II
2.23 Biela Manivela
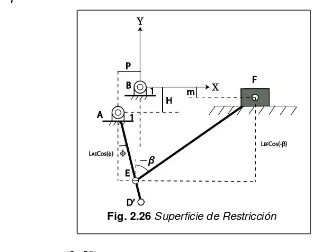
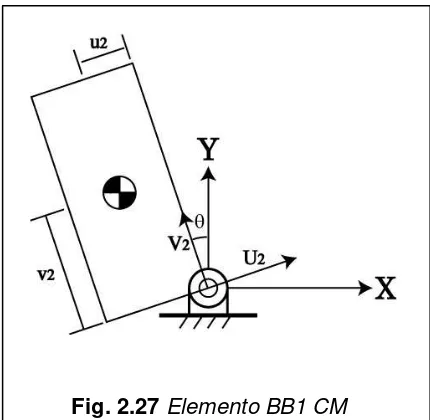
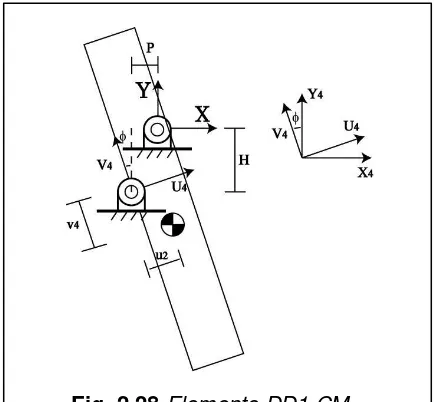
2.24 Mecanismo de Whitworth 2.25 Superficie de restricción I 2.26 Superficie de restricción II 2.27 Elemento BB1 CM
vi
vii
TABLAS Y FIGURAS
CAPÍTULO 3CAPÍTULO 3
FIGURAS
3.1 Energía Cinética
3.2 Mecanismo de Whitworth con CM 3.3 Energía Potencial Gravitatoria 3.4 Fuerzas Externas
viii
ix
CAPÍTULO 4
TABLAS
4.1 Velocidad de corte
4.2 Velocidades para desbaste y acabado 4.3 Dimensiones Manivela-Biela-Corredera
4.4 Valores de ángulos en el mecanismo Manivela-Biela-Corredera (R/L)=0.3 4.5 Dimensiones Inversión mecanismo Manivela-Biela-Corredera
FIGURAS
4.1 Posición de agarrotamiento
4.2 Mecanismo de retorno rápido de Whitworth 4.3 Mecanismo Manivela-Biela-Corredera
4.4 Inversión del mecanismo Manivela-Biela-Corredera 4.5 Mecanismo Manivela-Biela-Corredera
4.6 Aceleración corredera R/L 0.2 4.7 Aceleración corredera R/L 0.3 4.8 Aceleración corredera R/L 0.7 4.9 Ángulo de Transmisión
4.10 Mecanismo Manivela-Biela Corredera Inversiones 4.11 Inversión #2 Mecanismo de Manivela-Biela-Corredera 4.12 Ángulo de cambio de velocidad
4.13 Posiciones límite de eslabón AD 4.14 Trayectoria BC inscrita en AD 4.15 Ángulo gama
4.16 Trayectoria BC inicio 4.17 Trayectoria AD 4.18 Trayectoria AD inicio
4.19 Mecanismo retorno rápido de Whitworth 4.20 Simulación 1
4.21 Simulación 2 4.22 Simulación 3
4.23 Dimensiones del mecanismo de retorno rápido
x
xi
CAPÍTULO 5
FIGURAS
5.1 Balanceo estático 5.2 Fuerza centrípeta 5.3 Fuerza centrífuga
5.4 Fuerzas de inercia en un rotor 5.5 Momentos de inercia en un rotor
5.6 Balanceo en un rotor con masas en un solo plano 5.7 Balanceo en un rotor con masas. Caso general 5.8 Centro de masa en un rotor balanceado
5.9 Rotor desbalanceado 5.10 Rotor balanceado
5.11 Fuerzas y Momentos de inercia en un mecanismo de 4 barras 5.12 Mecanismo Biela-Manivela-Corredera.
5.13 Masas Equivalentes 5.14 Masa de Balanceo
5.15 Diagrama de cuerpo libre y aceleraciones
5.16 Mecanismo Manivela Biela Corredera MBC Simulación 5.17 Fuerzas de Sacudimiento MBC Simulación
5.18 Mecanismo Manivela Biela Corredera MBC Simulación Balanceado 5.19 Fuerzas de Sacudimiento MBC Simulación Balanceado
5.20 Mecanismo Manivela Biela Corredera con Manivela Rueda 5.21 Mecanismo MBC Simulación Balanceado Manivela Rueda
5.22 Fuerzas de sacudimiento MBC Simulación Balanceado Manivela Rueda
xii
xiii
SIMBOLOGÍA
CAPÍTULO 2SIMBOLOGÍA: CAPÍTULO 2
Ángulo entre el sistema de coordenadas inercial y el eslabón “2” Ángulo entre un sistema de coordenadas local ubicado en el punto A y el eslabón “4”
Ángulo entre un sistema de coordenadas local ubicado en el punto E y el eslabón “5”
P Distancia Horizontal, entre los puntos A y B H Distancia Vertical, entre los puntos A y B
m Distancia Vertical, entre los puntos B y la base del efector final.
1
BB Se refiere al Eslabón 2 C Se refiere al Eslabón 3
1
DD Se refiere al Eslabón 4 EF Se refiere al Eslabón 5 F Se refiere al Eslabón 6
) ,
(xB yB Coordenadas del Punto B
) ,
(xB1 yB1 Coordenadas del Punto B1
) ,
(xC yC Coordenadas del Punto C
) ,
(xD yD Coordenadas del Punto D
) ,
(xD1 yD1 Coordenadas del Punto D1
) ,
(xE yE Coordenadas del Punto E
) ,
(xF yF Coordenadas del Punto F
)
xiv
SIMBOLOGÍA
CAPÍTULO 2)
(LDD1 Longitud del elemento DD1
)
(LEF Longitud del elemento EF
)
(LEF Longitud del elemento EF
)
(LCB1 Distancia del punto C a B1
)
(LED1 Distancia del punto E a D1
)
(LAD1 Distancia del punto A al punto D1
1
BB
R
Vector Posición del Punto B al B1BC
R Vector Posición del Punto B al C
AC
R Vector Posición del Punto A al C
AD
R
Vector Posición del Punto A al D1
AD
R
Vector Posición del Punto A al D1AE
R
Vector Posición del Punto A al EEF
R
Vector Posición del Punto E al FBF
R
Vector Posición del Punto B al FBA
R Vector Posición del Punto B al A
1
BB
L
Distancia entre puntos B, B1BC
L Distancia entre puntos B, C
AC
L Distancia entre puntos A, C
AD
xv
SIMBOLOGÍA
CAPÍTULO 21
AD
L
Distancia entre puntos A, D1AE
L
Distancia entre puntos A, EEF
L
Distancia entre puntos E, Fr
Longitud manivelal Longitud biela
Ángulo manivela Ángulo biela
p Superficie de restricción
q Variable(s) generalizada(s)
f Ecuación de la posición
g Ecuación de la velocidad
Q
Matriz Jacobiana
q Velocidad variables generalizadas
t
Matriz con los elementos restantes
XP BB X BB R
R 1 1 Coordenada de Velocidad x del punto B1, desde el punto de referencia B
YP BB Y BB R
R 1 1 Coordenada de Velocidad y del punto B1, desde el punto de referencia B
BCXP BCX R
R Coordenada de Velocidad x del punto C, desde el punto de referencia B
BCYP BCY R
xvi
SIMBOLOGÍA
CAPÍTULO 2ACXP ACX R
R Coordenada de Velocidad x del punto C, desde el punto de referencia A
ACYP ACY R
R Coordenada de Velocidad y del punto C, desde el punto de referencia A
ADXP ACX R
R Coordenada de Velocidad x del punto D, desde el punto de referencia A
ADYP ACY R
R Coordenada de Velocidad y del punto D, desde el punto de referencia A
XP AD X AD R
R 1 1 Coordenada de Velocidad x del punto D1, desde el punto de referencia A
YP AD Y AD R
R 1 1 Coordenada de Velocidad y del punto D1, desde el punto de referencia A
AEXP AEX R
R Coordenada de Velocidad x del punto E, desde el punto de referencia A
AEYP AEY R
R Coordenada de Velocidad y del punto E, desde el punto de referencia A
EFXP EFX R
R Coordenada de Velocidad x del punto F, desde el punto de referencia E
EFYP EFY R
R Coordenada de Velocidad y del punto F, desde el punto de referencia E
BFXP BFX R
R Coordenada de Velocidad x del punto F, desde el punto de referencia B
ACP AC L
L Derivada con respecto del tiempo de la distancia LAC
XPP BB X BB R
R1 1 Coordenada de Aceleración x del punto B1, desde el punto de referencia B
YPP BB Y BB R
R1 1 Coordenada de Aceleración y del punto B1, desde el punto de referencia B
BCXPP BCX R
R Coordenada de Aceleración x del punto C, desde el punto de referencia B
BCYPP BCY R
xvii
SIMBOLOGÍA
CAPÍTULO 2ACXPP ACX R
R Coordenada de Aceleración x del punto C, desde el punto de referencia A
ACYPP ACY R
R Coordenada de Aceleración y del punto C, desde el punto de referencia A
ADXPP ACX R
R Coordenada de Aceleración x del punto D, desde el punto de referencia A
ADYPP ACY R
R Coordenada de Aceleración y del punto D, desde el punto de referencia A
XPP AD X AD R
R1 1 Coordenada de Aceleración x del punto D1, desde el punto de referencia A
YPP AD Y AD R
R1 1 Coordenada de Aceleración y del punto D1, desde el punto de referencia A
AEXPP AEX R
R Coordenada de Aceleración x del punto E, desde el punto de referencia A
AEYPP AEY R
R Coordenada de Aceleración y del punto E, desde el punto de referencia A
EFXPP EFX R
R Coordenada de Aceleración x del punto F, desde el punto de referencia E
EFYPP EFY R
R Coordenada de Aceleración y del punto F, desde el punto de referencia E
BFXPP BFX R
R Coordenada de Aceleración x del punto F, desde el punto de referencia B
ACPP AC L
L Segunda Derivada con respecto del tiempo de la distancia LAC CM
BB
R 1 Posición del CM del elemento BB1, desde el punto de referencia B
CM DD
R 1 Posición del CM del elemento DD1, desde el punto de referencia B
EFCM
R Posición del CM del elemento EF, desde el punto de referencia B
FCM
xviii
SIMBOLOGÍA
CAPÍTULO 2CCM
R Posición del CM del elemento C, desde el punto de referencia B
CM BB
R 1 Velocidad del CM del elemento BB1, desde el punto de referencia B
CM DD
R 1 Velocidad del CM del elemento DD1, desde el punto de referencia B
EFCM
R Velocidad del CM del elemento EF, desde el punto de referencia B
FCM
R Velocidad del CM del elemento F, desde el punto de referencia B
CCM
R Velocidad del CM del elemento C, desde el punto de referencia B
CM BB
R 1 Aceleración del CM del elemento BB1, desde el punto de referencia B
CM DD
R 1 Aceleración del CM del elemento DD1, desde el punto de referencia B
EFCM
R Aceleración del CM del elemento EF, desde el punto de referencia B
FCM
R Aceleración del CM del elemento F, desde el punto de referencia B
CCM
xix
SIMBOLOGÍA
CAPÍTULO 2
K Coeficiente de Velocidad de
AC
KL Coeficiente de Velocidad de LAC
K Coeficiente de Velocidad de
BFX
KR Coeficiente de Velocidad de RBFX
L Coeficiente de Aceleración de
AC
LL Coeficiente de Aceleración de LAC
L Coeficiente de Aceleración de
BFX
xx
xxi
SIMBOLOGÍA
CAPÍTULO 3SIMBOLOGÍA: CAPÍTULO 3
T Energía Cinética
m Masa
v Velocidad lineal I Inercia
w Velocidad angular
TBB1 Energía Cinética del centro de masa del elemento BB1
mBB1 masa del elemento BB1
RBB1CMX Coordenada x de la posición del centro de masa del elemento BB1
RBB1CMY Coordenada y de la posición del centro de masa del elemento BB1
RBB1CMXP Coordenada x de la velocidad del centro de masa del elemento BB1
RBB1CMYP Coordenada y de la velocidad del centro de masa del elemento BB1
IBB1 Inercia del elemento BB1
TDD1 Energía Cinética del centro de masa del elemento DD1
mDD1 masa del elemento DD1
RDD1CMX Coordenada x de la posición del centro de masa del elemento DD1 RDD1CMY Coordenada y de la posición del centro de masa del elemento DD1
RDD1CMXP Coordenada x de la velocidad del centro de masa del elemento DD1
RDD1CMYP Coordenada y de la velocidad del centro de masa del elemento DD1
IDD1 Inercia del elemento DD1
TEF Energía Cinética del centro de masa del elemento EF
mEF masa del elemento EF
xxii
SIMBOLOGÍA
CAPÍTULO 3REFY Coordenada y de la posición del centro de masa del elemento EF
REFCMXP Coordenada x de la velocidad del centro de masa del elemento EF
REFCMYP Coordenada y de la velocidad del centro de masa del elemento EF
IEF Inercia del elemento EF
TF Energía Cinética del centro de masa del elemento F mF masa del elemento F
RFX Coordenada x de la posición del centro de masa del elemento F
RFY Coordenada y de la posición del centro de masa del elemento F
RFCMXP Coordenada x de la velocidad del centro de masa del elemento F
RFCMYP Coordenada y de la velocidad del centro de masa del elemento F
IF Inercia del elemento F
TC Energía Cinética del centro de masa del elemento C
mC masa del elemento C
RCX Coordenada x de la posición del centro de masa del elemento C
RCY Coordenada y de la posición del centro de masa del elemento C RCCMXP Coordenada x de la velocidad del centro de masa del elemento C
RCCMYP Coordenada y de la velocidad del centro de masa del elemento C
IC Inercia del elemento C
(u2,v2) Coordenadas de posición del centro de masa del elemento BB1,
medida desde un sistema de coordenadas móvil, ubicado en el par B. (u3,v3) Coordenadas de posición del centro de masa del elemento C,
medida desde un sistema de coordenadas móvil, ubicado en el par C (u4,v4) Coordenadas de posición del centro de masa del elemento DD1,
medida desde un sistema de coordenadas móvil, ubicado en el par A. (u5,v5) Coordenadas de posición del centro de masa del elemento EF,
xxiii
SIMBOLOGÍA
CAPÍTULO 3(u6,v6) Coordenadas de posición del centro de masa del elemento F, medida desde un sistema de coordenadas móvil, ubicado en el par F
U Energía Potencial
Vg Energía Potencial debida a la gravedad
g Aceleración de la gravedad
h Altura medida desde un plano de referencia arbitrario
VgBB1 Energía potencial del elemento BB1 medida en su centro de masa,
desde el sistema de coordenadas inercial.
VgDD1 Energía potencial del elemento DD1 medida en su centro de masa,
desde el sistema de coordenadas inercial.
VgEF Energía potencial del elemento EF medida en su centro de masa,
desde el sistema de coordenadas inercial.
VgF Energía potencial del elemento F medida en su centro de masa,
desde el sistema de coordenadas inercial.
VgC Energía potencial del elemento C medida en su centro de masa,
desde el sistema de coordenadas inercial. L Función Lagrangiana.
QEXT Fuerzas externas generalizadas
ΦQ Matriz Jacobiana
λ Multiplicadores de Lagrange ΦQλ Fuerzas de restricción
Inercia generalizada
q Coordenadas generalizadas QNC Fuerzas no conservativas.
M Matriz Masa
xxiv
SIMBOLOGÍA
CAPÍTULO 3NG Matriz de gravedad
MTC Matriz de masa, cuyos componentes tienen que ver con la energía
cinética del elemento C
NCTC Matriz de fuerzas de coriolis y centrípeta, cuyos componentes tienen
que ver con la energía cinética del elemento C δW Trabajo Virtual
δs Desplazamiento Virtual
F Fuerza aplicada ri
Desplazamiento lineal virtualAi
Desplazamiento angular virtualδɸ Desplazamiento angular virtual en ɸ δβ Desplazamiento angular virtual en β δθ Desplazamiento angular virtual en θ
) ,
(X Y Sistema de coordenadas inercial
) ,
(U2 V2 Sistema de coordenadas colineal al elemento, ubicado en el par B. )
,
(X2 Y2 Sistema de coordenadas con la misma orientación que el inercial,
ubicado en el centro de masa del elemento “2” ó “BB1”.
)
(UCM2,VCM2 Sistema de coordenadas colineal al elemento, ubicado en el centro de masa del elemento “2” ó “BB1”.
) ,
(u2 v2 Distancias medidas desde el sistema de coordenadas (U2,V2)
BC
L Distancia del punto B a C.
1
BB
W Peso del elemento “2” ó “BB1”, concentrado en el CM.
1
CBB
f Fuerza ejercida por el elemento “3” ó “C” sobre el elemento “2” ó “BB1”.
1 1BB
xxv
SIMBOLOGÍA
CAPÍTULO 3
CM BB
R 1 Aceleración del CM del elemento BB1, que se refiere a la segunda derivada con respecto al tiempo, de la posición del CM, desde el sistema inercial.
B CMBB
R 1 Posición medida desde el CM del elemento BB1 al Par B, utilizando el sistema de coordenadas (X2,Y2)
C CMBB
R 1 Posición medida desde el CM del elemento BB1 al Par C, utilizando el sistema de coordenadas (X2,Y2)
CCM
R Aceleración del CM del elemento C, que se refiere a la segunda derivada con respecto al tiempo, de la posición del CM, desde el sistema inercial.
CMCC
R Posición medida desde el CM del elemento C al par C, utilizando el sistema de coordenadas (X3,Y3).
CMCNC
R Posición medida desde el CM del elemento C al punto de aplicación de la fuerza normal al elemento C, ejercida por el elemento DD1 utilizando el sistema de coordenadas (X3,Y3).
CCMC
R Posición medida desde el punto C al CM del elemento C, utilizando el sistema de coordenadas (U3,V3)
CNC
R Posición medida desde el punto C al punto de aplicación de la fuerza normal al elemento C utilizando el sistema de coordenadas (U3,V3)
CM DD
R 1 Aceleración del CM del elemento DD1, que se refiere a la segunda derivada con respecto al tiempo, de la posición del CM, desde el sistema inercial.
A CMDD
R 1 Posición medida desde el CM del elemento DD1 al par A, utilizando el sistema de coordenadas (X4,Y4).
E CMDD
xxvi
SIMBOLOGÍA
CAPÍTULO 3NC CMDD
R 1 Posición medida desde el CM del elemento DD1 al punto de aplicación de la fuerza normal al elemento DD1, ejercida por el elemento C utilizando el sistema de coordenadas (X4,Y4).
1
ACMDD
R Posición medida desde el punto A al CM del elemento DD1, utilizando el sistema de coordenadas (U4,V4)
AE
R Posición medida desde el punto A al punto E, utilizando el sistema de coordenadas (U4,V4)
ANC
R Posición medida desde el punto A al punto de aplicación de la fuerza normal al elemento DD1 utilizando el sistema de coordenadas
) , (U4 V4
EFCM
R Aceleración del CM del elemento EF, que se refiere a la segunda derivada con respecto al tiempo, de la posición del CM, desde el sistema inercial.
CMEFE
R Posición medida desde el CM del elemento EF al par E, utilizando el sistema de coordenadas (X5,Y5).
CMEFF
R Posición medida desde el CM del elemento EF al par F, utilizando el sistema de coordenadas (X5,Y5)
ECMEF
R Posición medida desde el punto E al CM del elemento EF, utilizando el sistema de coordenadas (U5,V5)
EF
R Posición medida desde el punto E al punto F, utilizando el sistema de coordenadas (U5,V5)
FCM
R Aceleración del CM del elemento F, que se refiere a la segunda derivada con respecto al tiempo, de la posición del CM, desde el sistema inercial.
CMFF
xxvii
SIMBOLOGÍA
CAPÍTULO 3CMFNF
R Posición medida desde el CM del elemento F al punto de aplicación de la fuerza normal al elemento F, utilizando el sistema de coordenadas (X6,Y6)
CMFfcorte
R Posición medida desde el CM del elemento F al punto de aplicación de la fuerza de corte, utilizando el sistema de coordenadas (X6,Y6)
FCMF
R Posición medida desde el punto F al CM del elemento F, utilizando el sistema de coordenadas (U6,V6)
Ffcorte
xxviii
xxix
SIMBOLOGÍA: CAPÍTULO 4
N Número de carreras por minuto Vc Velocidad de corte del metal L Longitud de la carrera
Ti Tiempo de la carrera de trabajo Tt Tiempo total de las dos carreras
short
r Longitud del eslabón más corto de un mecanismo de 4 barras
long
r Longitud del eslabón más largo de un mecanismo de 4 barras
b a r
r , Longitudes de los eslabones restantes de un mecanismo de 4 barras m Distancia vertical entre el eje de referencia fijo y el par del eslabón F h Distancia vertical entre el eje de referencia fijo y el par A
Stroke Carrera de la corredera Crank Manivela
R Longitud Manivela L Longitud Biela
Ángulo de Transmisión x Posición de la corredera Ángulo de la manivela con respecto a la horizontal
Ángulo de la biela con respecto a la horizontal
Velocidad angular de la manivela
Velocidad angular de la biela
x Velocidad de la corredera
xxx
Aceleración angular de la manivela
Aceleración angular de la biela
x Aceleración de la corredera
Ángulo de la manivela con respecto a la vertical Ángulo de la biela con respecto a la vertical Q Relación de velocidades de avance y retroceso
Ángulo de avance en la manivela Ángulo de retroceso en la manivela
Periodo del motor Ángulo de referencia en la manivela con respecto a la horizontal, que se utiliza como indicador de los tiempos de avance y retroceso, en la síntesis cinemática
AB
L Longitud del eslabón AB
AD
L Longitud del eslabón AD
xxxi
SIMBOLOGÍA: CAPÍTULO 5
F Fuerza
M Momento
m masa
G
A Aceleración del centro de masa I Segundo momento de inercia
Aceleración angularCENTRÍPETA
F Fuerza centrípeta R Radio de círculo
, w Velocidad angulara,b Distancia entre masas en un rotor
W Peso
INERCIA
F Fuerza de inercia
INERCIA
M Momento de inercia
ij
F Fuerza que ejerce i sobre j
ij
R Vector desde i hasta j
EBiela
m Masa concentrada de la Biela en el par E
FBiela
m Masa concentrada de la Biela en el par F
EF
m Masa del eslabón EF
e Distancia del centro demasa del eslabón EF al punto e f Distancia del centro de masa del eslabón EF al punto f
EF
I Segundo momento de inercia del elemento EF
xxxii
L Longitud del eslabón EF
AE
L Longitud del eslabón AE
AE
m Masa del elemento AE
Balanceo
m Masa agregada para balancear parcialmente el mecanismo
Balanceo
L Longitud medida desde el par A, hasta el punto donde se ubica la masa de balanceo
AFX
R Posición horizontal del eslabón F, medida desde el par A
Ángulo de la horizontal hacia la manivela
AFX
R Aceleración horizontal del eslabón F, obtenida al derivar dos veces la posición del eslabón F, me
xxxiii El objetivo principal de esta tesis, es el análisis de posición, velocidad y fuerzas de un mecanismo de configuración cerrada, como el de retorno rápido de Whitworth
Derivados del objetivo general se plantean los siguientes objetivos específicos:
Realizar una investigación de los modelos utilizados para describir el movimiento de los mecanismos de lazo cerrado, para definir sus ventajas y diferencias.
Encontrar el modelo cinemático y dinámico que rige a un mecanismo de retorno rápido que presenta una no linealidad en la aceleración de coriolis.
Programar todas las ecuaciones planteadas, para tomarse como base en una futura implementación de algún algoritmo de control.
Realizar la síntesis del mecanismo, para encontrar las dimensiones que permitan utilizarlo en una máquina herramienta
Proponer métodos de balanceo, para facilitar la implementación de algoritmos de control.
xxxiv
xxxv En las últimas décadas el estudio de los mecanismos considerados como de lazo abierto, en específico los robots, ha tenido muchos avances. De tal manera que existe un modelo común para este tipo de mecanismos, que facilita la implementación de algoritmos de control. Sin embargo, debido a su propia constitución, estos mecanismos presentan ciertas deficiencias en la precisión, velocidad y rigidez del efector final, por lo que su función principal, aunque no única, es la denominada “pick and place”.
Los estudios recientes se han enfocado a los mecanismos de lazo cerrado como un método para solventar esta deficiencia del efector final. Para tal fin se ha tomado como punto de partida, encontrar un modelo semejante al planteado para los mecanismos de lazo abierto en el entendido de aprovechar toda la información que pueda facilitar la implementación de algoritmos de control.
Se han propuesto diferentes métodos que tienen en común, el hecho de que un mecanismo de lazo abierto presenta un actuador por cada par cinemático, a diferencia de un mecanismo de lazo cerrado cuyo número de pares cinemáticos supera al número de actuadores. Lo que lleva a tener un número distinto de ecuaciones diferenciales que describen el sistema y las variables involucradas. Para lidiar con este inconveniente se agregan las llamadas coordenadas generalizadas dependientes y el uso de los multiplicadores de Lagrange.
Además, los modelos planteados se implementan en software como modelos generalizados, en donde es muy importante que su estructura no complique el procesamiento de la información. Una de las claves para lograr este objetivo es la selección de las coordenadas y puntos de referencia más adecuados. Esto ha llevado a la construcción de modelos basados en coordenadas naturales, de punto de referencia, relativos y mixtos.
La información heredada de los mecanismos de lazo abierto, ha servido para implementar algoritmos de control en los mecanismos de lazo cerrado utilizando estos modelos planteados. Se presentan buenos resultados principalmente en simulaciones y prototipos de laboratorio. Esto a causa de la simplificación del modelo y la imposición de restricciones ideales.
xxxvi
El término mecatrónica, y en específico el diseño mecánico basado en el control, ha surgido como una propuesta para facilitar la implementación de algoritmos de control en los mecanismos. La idea consiste en simplificar el modelo del sistema por medio del diseño mecánico. El balanceo se plantea como una forma de lograr tal fin, puesto que un mecanismo bien balanceado mantiene su centro de gravedad estático o casi estático, que tiene como consecuencia la cancelación o disminución de los efectos de algunos términos en el modelo del sistema.
El presente trabajo, hace un recorrido a través de los estudios antes mencionados, aplicándolos a un mecanismo de retorno rápido, que tiene la característica que presente una no-linealidad debido a la aceleración de coriolis. Esta característica aunque complica el modelo del sistema, es muy valorada en el estudio de los esquemas de control. Además, el modelo resultante se planteó de tal manera que pueda describir diferentes geometrías en los eslabones.
1
INTRODUCCIÓN
CAPÍTULO 1El estado del arte es el recorrido que se realiza -a través de una investigación de carácter bibliográfico- con el objeto de conocer y sistematizar la producción científica en determinada área del conocimiento.
Cuando leemos acerca de un inventor, científico o alguien importante en la historia, no es fácil entender su trabajo sin antes estudiar las razones que lo llevaron a desarrollarlo, es decir; qué conocimientos existían y qué hacía falta cuando se hizo manifiesto.
Un ejemplo, sería Isaac Newton, quien estudio a Galileo, Kepler, Tycho Brahe, Copérnico, Aristóteles, Euclides, etc., para entender que era necesario encontrar una forma de describir los cuerpos en movimiento que fuera simple y eficaz.
Cuando usamos alguna herramienta o máquina, generalmente no nos preguntamos quien la inventó, o desde cuando existe, o aún más, como vivían las personas sin ella. Al entenderlo nos damos cuenta del progreso y el trabajo que se ha desarrollado a través de los siglos para contar con ella. Y aún más si queremos mejorarla, siempre es
valioso saber que se ha hecho antes y que existe ahora para hacerla más eficiente.
Tuvieron que pasar muchos siglos en la historia del hombre, para que finalmente en el siglo XX, surgieran las computadoras que son tan comunes de conseguir y usar en nuestros días, desde el descubrimiento de la energía eléctrica y magnética, además plantear la ley que rige estos fenómenos, el camino que se siguió para el desarrollo de la electrónica, y toda la evolución del mundo digital.
Este capítulo describe un breve recorrido a través de la historia y los fundamentos de la mecánica, el control, la mecatrónica y la aplicación de ella en el diseño de los mecanismos.
Índice.
1.1 Evolución de la mecánica 1.2 Breve historia del control
automático
1.3 Mecatrónica
1.4 Mecanismos desde un punto
de vista mecatrónico
2
3
La inquietud intrínseca del ser humano, lo ha llevado siempre a la búsqueda de la verdad. La observación, el análisis y la imaginación han sido herramientas fundamentales para encontrarla.
No es raro encontrar grandes descubrimientos y desarrollos en la antigüedad, pues los hombres de ese entonces tenían la misma capacidad que los que habitamos actualmente la tierra, la diferencia se basa sólo en las herramientas empleadas.
El interés de saber cuál es el principio que rige un fenómeno y poderlo describir y manipular ha sido siempre el motor propulsor para los hombres de ciencia. Así el nacimiento de la mecánica fue un paso lógico en la historia de la humanidad. La mecánica es la rama de la física que estudia y analiza el movimiento y reposo de los cuerpos y su evolución en el tiempo.
La construcción de los conceptos que hoy conocemos de la mecánica, se lo debemos a grandes hombres, que a través de la historia han aportado su tiempo y trabajo.
Grandes griegos como Pitágoras, Aristóteles, Arquímedes, Strato, Ctsibius entre otras grandes mentes, contribuyeron a formar las bases del entendimiento
Los griegos estudiaron los movimientos de los objetos terrestres y espaciales, también la teoría de números, trigonometría y geometría, además desarrollaron la idea del concepto de fricción, impacto y resistencia de las vigas, entre otras muchas aportaciones.
Con la ayuda de la palanca, la cuña, la polea, el engrane y el tornillo, los griegos pudieron construir máquinas como la catapulta, proyectiles, además de barcos y edificios, que después perfeccionaron los romanos.
En el siglo XV, Leonardo Da Vinci, hizo observaciones de las leyes de la dinámica y estática. Da Vinci sólo se enfocó en máquinas específicas y no a los principios generales.
En el mismo siglo, Copérnico, Tycho Brahe y Kepler cambiaron el paradigma aristotélico con sus aportaciones del estudio de los astros.
4
En el siglo XVI, Galileo Galilei estudió el movimiento del plano inclinado, realizó importantes observaciones acerca del movimiento del péndulo.
Muchas veces la dinámica de las máquinas eran bien entendidas antes que existiera un profundo entendimiento teórico de la dinámica, ese fue el caso del péndulo de Galileo, que fue descrito antes que Newton y Euler nacieran.
En el mismo año que murió Galileo en 1642, nació en Inglaterra Isaac Newton, quien en 1686 publicara su trabajo “Principia”, que fue un tratado de la dinámica de las partículas y su comportamiento bajo el influjo gravitacional. Planteándose un tiempo absoluto, un espacio homogéneo, en donde no hay puntos o lugares privilegiados (el metro es igual en la tierra que en el espacio), y un espacio isotrópico en donde no hay direcciones privilegiadas
Las tres leyes enunciadas por Newton, revolucionaron el mundo científico. Sin embargo fue hasta 1760, cuando el suizo Leonard Euler público su obra “Theoria motus corporum solidorum sea rigidorum”, cuando se empezó a entender la dinámica de los cuerpos rígidos. Euler hizo grandes aportaciones a las matemáticas, su nombre aparece en casi todas las ramas de las matemáticas. Joseph-Louis de Lagrange (1736-1813), en su obra “Mecanique Analytique”, aporto una nueva manera de entender la mecánica, analizando los problemas desde un punto de vista energético, estudió problemas dinámicos con restricciones, y problemas de optimización.
El trabajo de Lagrange fue publicado durante el monopolio de Watt y Boulton de la máquina de vapor.
D’Alembert, fue contemporáneo de Euler y Lagrange, publicó su obra “Tratado de dinámica” que enuncia el teorema que lleva su nombre “principio de D’Alembert o principio de los trabajos Virtuales”.
James Watt, ingeniero, matemático e inventor escoces, aportó importantes conocimientos para la creación de la máquina de vapor, principal eje en la revolución industrial y principios de la teoría de control clásico, entre sus muchas obras se encuentra el mecanismo de Watt, que convierte el movimiento circular en un movimiento casi rectilíneo. Watt se asoció con el industrial Boulton y juntos instalaron la primera máquina de vapor rotativa en 1786.
Julius Weisbach en 1848 con su tratado “Principios de maquinaria e ingeniería” presentó de manera general la dinámica de cuerpos rígidos, estabilidad y teoría de oscilaciones.
5
Borgins en 1818 y Haton años mas tarde, publicaron tratados que abarcan los más importantes mecanismos de una manera descriptiva, el primero clasificándolos en 6 grandes familias, receptores, comunicadores, modificadores, de soporte, reguladores y operadores. Mientras que Haton describió más de 250 mecanismos. Más tarde en Alemania Franz Reuleux (1859), conocido como el padre de la cinemática, desarrolló una notación para describir la topología de los mecanismos, diseñó y construyó más de 300 piezas de mecanismos, en los cuales se incluyen el mecanismo de cuatro barras. Sus teorías se basaron en ideas geométricas no precisamente en los principios dinámicos. También realizó trabajos con la fuerza centrífuga y los momentos de inercia rotatorios.
Joseph Withworth, ingeniero inglés, que en el siglo XIX, contribuyó con la introducción de nuevos estándares de precisión en la manufactura a un grado no visto antes, ya que gracias a su trabajo, fue común utilizar una precisión de una diez milésima de pulgada. Inventor del mecanismo de retorno rápido utilizado en las máquinas de cepillo que ayudó a ahorrar tiempo de maquinado.
William Rowan Hamilton, matemático, físico y astrónomo irlandés, quien hizo su mayor contribución durante el siglo XIX, trabajó con óptica, dinámica y álgebra. Su trabajo en dinámica y el descubrimiento del cuaternión son sus obras más representativas. Las ecuaciones de Hamilton, son ecuaciones diferenciales de primer grado. Los trabajos de Hamilton, Jacobi, Caughy, Navier y Poincaré no fueron incorporados en el diseño de máquinas hasta mediados del siglo XX.
En el Siglo XX, los problemas dinámicos tuvieron gran importancia debido principalmente a la invención y la expansión del uso del automóvil. Al tratar estos problemas se reconocía a los elementos mecánicos como componentes elásticos y eran tratados usualmente de acuerdo a la teoría de vibraciones, que es un método matemático que surgió en el siglo XIX con los trabajos de Rayleigh en su teoría del sonido.
En 1928, Stephen Timoshenko, considerado el padre de la ingeniería mecánica moderna, divulgó en América importantes trabajos de Europa y Rusia, combinándolo con su experiencia para resolver problemas industriales. Su primer libro publicado en 1922, “Vibration Problems in Engineering”, abarcó problemas lineales y de vibraciones no armónicas. Timoshenko trabajó con la teoría de elasticidad y Resistencia de los Materiales, además de desarrollar metodologías para tratar con problemas dinámicos con ayuda de D.H Young, trabajando ambos en la universidad de Stanford.
6
7
La idea del control por retroalimentación que ha revolucionado nuestra manera de vivir y de concebir nuestro mundo, tiene un principio básico, el cual consiste en obtener la respuesta de nuestro sistema, compararla con la respuesta deseada, una vez que se sabe cuánto difiere una de la otra y en qué manera, entonces se modifican los parámetros de entrada con el objeto de que la respuesta del sistema se asemeje en lo mejor posible a la respuesta deseada.
Esta idea pudo haber sido concebida por griegos o árabes del antiguo mundo, plasmada en sus máquinas, p. ej. En los relojes de agua, lámparas de aceite, dispensadores de vino, niveladores de agua, etc.
En la era moderna, los dispositivos de regulación de temperatura en calderas o de posicionamiento de molinos de viento fueron los precursores del control en los siglos XVII y XVIII
La forma de obtener información del sistema en estos siglos, era a través de dispositivos mecánicos, un ejemplo muy ilustrativo es el famoso gobernador utilizado en la máquina de vapor de James Watt, quien obtuvo la idea de Thomas Mead, que lo utilizaba como sensor de velocidad. Mejorar el funcionamiento del gobernador fue uno de los principales retos del control en el siglo XIX, ya que a menudo se encontraban problemas de inestabilidad.
En 1868, el inglés, James Clerk Maxwell analizó la dinámica del gobernador obteniendo las condiciones de estabilidad para un sistema de tercer orden en términos de la ecuación característica y fue su compatriota Edward James Routh quien obtuvo la solución para un sistema de quinto orden. Haciendo un trabajo independiente en Alemania, Adolf Hurwitz, quien siguió los pasos de Vyshnegradskii llegó a la misma conclusión de Routh, por lo que el criterio de estabilidad se conoce como Routh-Hurwitz
A finales del siglo XIX y principios del siglo XX se presentaron aplicaciones de control en la industria naval, aeronáutica y militar, los cuales ya usaban sistemas sofisticados de retroalimentación. El giroscopio tuvo un papel muy importante en el desarrollo de estabilizadores de aviones y barcos.
8
Nicholas Minorsky en 1922, quien nació en Rusia, y emigró a los Estados Unidos, realizando estudios importantes en la conducción de barcos recomendó, aunque no en los mismos términos que lo conocemos ahora, una combinación de una acción proporcional, derivativa e integral en los sistemas retroalimentados. Y a finales de la década de 1930, ya existían controladores de tipo proporcional, derivativo e integral, PID.
En las tres primeras décadas del siglo XX, hubo importantes análisis en los circuitos electrónicos y diseño de filtros.
Harry Nyquist en 1932, analizó el problema de estabilidad de circuitos retroalimentados utilizados en la transmisión de señales telegráficas. Nyquist demostró usando los resultados de Cauchy Euler que la clave de estabilidad está en si la respuesta frecuencial del sistema de lazo abierto se encuentra o no en el plano complejo rodeando el punto 1+i0.
Una de las grandes ventajas del criterio de Nyquist es que no se requiere la forma analítica de la respuesta frecuencial del sistema en lazo abierto. Un arreglo de puntos muestra, pueden ser graficados sin la necesidad del modelo matemático, otra ventaja consiste en que a diferencia del criterio de Routh-Hurwitz una valoración de la respuesta transitoria puede ser hecha directamente desde las gráficas de Nyquist en términos de los márgenes de la ganancia y la fase.
Hendrik Bode a mediados de 1930 introdujo las nociones de márgenes de ganancia y fase, además de redibujar las gráficas de Nyquist a su forma actualmente conocida con el punto crítico en -1+0i. También introdujo las aproximaciones con líneas rectas a las curvas de respuesta frecuencial de sistemas lineales graficándolas en escala logarítmica.
En la segunda guerra mundial, se presentaron importantes avances en la teoría de control. Ingenieros de distintas disciplinas trabajaron juntos para implementar sistemas militares de alto desempeño. Los laboratorios que participaron en dichos proyectos como el MIT y los laboratorios Bell, al terminar la guerra, elaboraron y dieron a conocer las técnicas que llegaron a formar lo que conocemos como el control clásico.
9
El control moderno fue en esencia originado con los trabajos de Poincaré y Lyapunov a principios del siglo XIX quienes trabajaron con la linealización analítica de un campo vectorial en un entorno de un punto de equilibrio, a través de la existencia de soluciones analíticas de ecuaciones en derivadas parciales casi lineales de primer orden, la dinámica de sistemas no lineales y estabilidad de sistemas variantes en el tiempo.
Lagrange en su “Mecanique analytique” desarrolló un importante avance en el entendimiento de la estabilidad de sistemas mecánicos. Su teorema expresa que el equilibrio es estable en los puntos donde la energía potencial tiene un mínimo.
Lyapunov, tomó el trabajo de Lagrange e introdujo su propia definición en su monografía “Problema general de la estabilidad del movimiento”, en donde se encuentra por primera vez una definición con rigor matemático y que va más allá del concepto de estabilidad utilizado en la mecánica, ya que analiza la estabilidad de una ecuación diferencial y no nada más en sus puntos de equilibrio sino en cualquier solución de la ecuación.
Los científicos rusos continuaron las líneas de estos grandes genios, pero no se dieron a conocer al mundo, hasta después de la segunda guerra mundial.
La guerra fría trajo consigo nuevos retos en materia de control en aplicaciones militares tanto en sistemas lineales como no-lineales. Los ingenieros siguieron el ejemplo de Poincaré que formulaba las ecuaciones diferenciales generales en términos de un juego de ecuaciones de primer orden, variables de estado, que permitían una representación más sofisticada del comportamiento dinámico, además que se podía trabajar con problemas multi-variable.
La computadora digital revolucionó el desarrollo de la teoría de control, ya que pudieron desarrollarse métodos de aproximación confiables, además que permitió el desarrollo de técnicas de control avanzadas que se desarrollaron en la década de los 60 y 70s del siglo XX, como son: El control Adaptativo, el control robusto y óptimo, el control difuso entre otros.
10
11
MECATRÓNICA
CAPÍTULO 1En 1969, el ingeniero japonés Yasakawa definió la mecatrónica como: “La palabra mecatrónica está compuesta por “meca” referida a mecanismo y “trónica” referida a electrónica. En otras palabras, tecnologías y productos de desarrollo incorporarán la electrónica más y más dentro de los mecanismos de forma íntima y orgánica, de tal manera que será imposible definir cuando termine una y comience la otra”.
Desde entonces se han sugerido otras definiciones, aquí presentamos algunas de ellas.
Tomizuka y Fukada en 1996, “La integración sinérgica de la ingeniería mecánica, con la electrónica y el control computacional inteligente, en el diseño y manufactura de productos y procesos industriales”.
Auslander y Kempf, “La mecatrónica es la aplicación de hacer decisiones complejas para la operación de los sistemas”.
Shetty y Kolk en 1997, “Mecatrónica es una metodología usada para el diseño óptimo de sistemas electromecánicos”.
W. Bolton, “Un sistema mecatrónico no es solamente la unión de los sistemas mecánicos y eléctricos y ni sólo un sistema de control, es una completa integración de ellos”.
Para muchos ingenieros de diseño, la mecatrónica no es algo nuevo, sino sólo un paso evolutivo, pues se han hecho productos con estas características hace más de 25 años.
La mecatrónica brinda un mecanismo para entender el proceso de diseño para definir, clasificar, organizar e integrar muchos aspectos del diseño en un solo paquete. No es, por tanto, una nueva rama de la ingeniería, sino un concepto que enfatiza la necesidad de integración e interacción de distintas disciplinas de la ingeniería.
12
MECATRÓNICA
CAPÍTULO 1La evolución de la mecatrónica ha estado plasmada en el diseño y funcionamiento del automóvil, ya que para los años 60’s la radio era el único dispositivo electrónico dentro del coche. En los 70’s el automóvil ya constaba con el sistema de ignición electrónico al igual que el sistema antibloqueo de frenos (ABS) para eliminar el deslizamiento de las llantas al frenado. A mitad de los años 90s, el sistema de control de tracción (TCS) ya estaba incluido en los automóviles, el cual asegura el mejor comportamiento de la aceleración.
Hoy en día microprocesadores de 8, 16 o 32 bits son usados en la implementación de sistemas de control dentro del vehículo.
Los microprocesadores de 32 bits son usados para la administración del motor, el control de la transmisión y las bolsas de aire, el de 16 bits es usado para los sistemas ABS, TCS, VDC y aire acondicionado, mientras que el de 8 bits, es usado para los asientos y el control de los espejos. En palabras sencillas, el automóvil ha sido transformado en un sistema mecatrónico.
En el diseño mecatrónico, la interconexión entre los sistemas mecánicos y electrónicos es de vital importancia, ya que los sistemas electrónicos pueden simplificar u optimizar los sistemas mecánicos. Al añadir un control de lazo cerrado, ya sea de posición, velocidad o fuerza no sólo obtenemos información detallada de estas variables, sino que podemos aproximar el sistema mecánico a un sistema lineal, aun cuando este sea en naturaleza no lineal, además que podemos aumentar la precisión del sistema.
El diseño de un sistema mecatrónico requiere de un desarrollo sistemático y herramientas de desarrollo modernas.
El desarrollo sistemático de una máquina o un vehículo, empezaría por entender el modelo que lo rige, implementar un sistema mecánico, adicionar los sensores y actuadores y proponer un modelo de control. Una vez que vemos las posibles mejoras y ventajas, se hace un rediseño de cada una de las etapas para finalmente hacer una buena integración de todos los sistemas.
En la fase de modelado, existen dos maneras de obtener un buen resultado, la primera es mediante un modelo teórico y la segunda por medio de datos experimentales. Para la verificación de estos modelos, Los métodos la respuesta frecuencial, así como el análisis espectral de Fourier son utilizados.
13
MECATRÓNICA
CAPÍTULO 1Se puede simular todo el sistema mecánico, eléctrico (motores), sensores y actuadores y la implementación del modelo de control. Existen tres etapas importantes en la simulación, En la primera se analiza el sistema mecánico, su resistencia a la flexión, torsión, tensión, fatiga, etc., debidos principalmente a las cargas y a las vibraciones mecánicas. También hay análisis de fluidos y análisis térmicos, así como de contacto y fractura. La segunda consiste en implementar el modelo dinámico así como sus condiciones iniciales en software, entonces analizar, modificar y mejorar el comportamiento del sistema mediante una ley de control. Finalmente La tercera etapa consiste en analizar el modelo dinámico implementado en software que interactúe con sensores y actuadores reales.
14
15
MECATRÓNICA EN LOS MECANISMOS
CAPÍTULO 1Los mecanismos forman parte de la historia de la creatividad humana, con su ayuda se han construido máquinas que facilitan nuestras vidas, tal fue el caso de los molinos o relojes inventados en la antigüedad, y los utilizados en los aviones, helicópteros y naves espaciales de nuestros días.
En los últimos 10 años se han presentado varios trabajos acerca de ellos, ya sea acerca de su diseño u optimización o como bases para probar modelos de control, ya que los mecanismos proporcionan características atractivas en sus modelos dinámicos para ser controladas.
Los servomotores son una parte muy importante en el desarrollo de estos trabajos, pues es básicamente el actuador a controlar en el mecanismo, ya que muchos de estos presentan un solo grado de libertad.
En 1996, J.S. Park estudió la eficiencia de los servomotores en los casos en que una máquina tenga que moverse entre dos puntos repetitivamente ya sea en forma de rotación o traslación. En su estudio propone un perfil de movimiento con una máxima eficiencia de energía. A pesar de que ya existían perfiles que trabajaban bien en la industria, como son el perfil trapezoidal, exponencial, polinomial, sinusoidal, cosenoidal, entre otros, estos no tenían una eficiente conversión de energía, ya que mucha de la energía de entrada se desperdiciaba en forma de calor, por lo que el sistema requería grandes cantidades de energía de entrada. [12]
J.S. Park propone estudiar la transferencia de energía en el sistema en el movimiento de punto a punto, además de analizar como un perfil dado interviene o afecta en dicha transferencia y determinar un perfil de aceleración que presente mejor eficiencia de energía. Park, considera el motor como un convertidor de energía eléctrica a energía mecánica (trabajo mecánico). Con la premisa que al disminuir el calor disipado, se incrementa la eficiencia de conversión de energía y se necesita menos energía en la entrada, Park, finalmente construye su perfil parabólico de aceleración para un motor de corriente DC.
16
MECATRÓNICA EN LOS MECANISMOS
CAPÍTULO 1En un trabajo presentado en 1997 por la universidad Chung Yuan Christian en la República de China, se presentó la forma de calcular la posición, velocidad y aceleración de un mecanismo de cambio (toggle) empleando una técnica de restricción de multi-cuerpo. [13]
El mecanismo de cambio (toggle) es por lo general una combinación de un mecanismo de cuatro barras y mecanismo de biela-manivela.
Se habían realizado ya trabajos acerca de cómo modelar la dinámica de este mecanismo sin utilizar restricciones no ideales. Los trabajos previos que utilizaron multiplicadores de lagrange resolvían las ecuaciones dinámicas utilizando un método numérico.
En el trabajo presentado por la universidad Chung Yuan, presentan un mecanismo de cambio (toggle), formado por dos mecanismos de biela-manivela. Las posiciones fueron obtenidas utilizando trigonometría y las velocidades y aceleraciones por un proceso derivativo de las primeras. La dinámica se basó en las ecuaciones de Hamilton y los multiplicadores de Lagrange obteniendo ecuaciones diferenciales algebraicas que describen el movimiento del mecanismo. Es difícil obtener soluciones directas para las ecuaciones planteadas, por lo cual se plantea método de reordenamiento y partición de las ecuaciones de movimiento, obteniendo un arreglo de ecuaciones diferenciales en términos de una sola componente de las coordenadas generalizadas, que son consistentes con las restricciones de posición y velocidad que actúan en el sistema. Al resolver este sistema de ecuaciones diferenciales, obtenemos el comportamiento del sistema.
En 1997, en la universidad de Gaziantep, Turquía, se presentó el modelado, simulación y control de un mecanismo de cuatro barras con un servo-motor sin escobillas [14]