Implementación de técnicas de modulación digital mediante un generador de señales arbitrarias
150
0
0
Texto completo
(2) Instituto Politécnico Nacional. II | Página. ESIME.
(3) Instituto Politécnico Nacional. ESIME. Dedicatorias A mi madre, Fabiola , entender a veces que la vida no marchará siempre como uno quisiera resulta difícil para alguien con tan pocos años de experiencia, a ti te dedico el resultado de la fé, la inmensa comprensión y el esfuerzo diario que sólo una madre sería capaz de ofrendar a un hijo.. A Victor, mi padre porque sin el rigor necesario y preciso es imposible entender que la vida debe vivirse responsable y objetivamente, con amplio criterio ¡Pero de mi sería poco sin tu cariño y tu apoyo incondicional! Te dedico así, el fruto de un. esfuerzo solidario y en equipo que se formó a través de los años entre juegos, guitarras y trabajo.. A ti abuelo Francisco a tu memoria y recuerdo. Abuelita Berta no sería nada de mi sin haberme hecho entender que la mejor manera de vivir es otorgando amor.. A ti Ana Areli por haber sabido ser un ejemplo íntegro y recto de vida, incondicional y a disposición, por haber estado firme y segura para mí en esos momentos de la vida donde. III | Página.
(4) Instituto Politécnico Nacional. ESIME. sólo esperas la hora para desistir de todo, te dedico el producto de un esfuerzo muy particular que sólo dos hermanos entienden.. A Estanislao Gutierrez Rivera, pues has estado al pendiente de mí, eres amigo y siempre tienes un consejo sin prejuicio y constructivo: las palabras correctas; por tu ejemplo de esfuerzo y disciplina, gracias. A Ricardo Campa Carrizoza, por vivir al pendiente de cada una de las etapas de mi vida, siendo un pilar importante e incondicional en mi vida.. A Karla Mendoza Hernández, es difícil encontrar personas fuera del núcleo familiar quienes estén al pendiente de tu labor y quieran ser pate de ella tan desinteresadamente, a ti por haber sido compañía y participe de este proyecto desde sus inicios, por mostrarme que hay calma en este mundo agitado.. A Pablo Marín Callejo, por ser un cómplice, amigo y consejero particular, por el infinito apoyo que me has brindado en los mejores y los peores días.. A la familia Herrera Dublán y anexos, quienes me han demostrado que ser profesionista es algo que va más allá de tener un título profesional.. A todas esas personas caídas en la búsqueda de falsas aras de libertad y justicia y debido al enfoque bélico/violento de la ciencia, la tecnología e ingeniería del que fueron víctimas; a su memoria e historia que me hacen reflexionar y concientizar la aplicación de mis conocimientos.. Jorge IV | Página.
(5) Instituto Politécnico Nacional. ESIME. Dedicatorias A mis padres Noemi y Martin. quienes han apoyado incondicionalmente mi formación. académica y personal a cada paso, que están en esos momentos donde requiero comprensión, palabras de aliento y afecto, por brindarme la confianza, tiempo y las herramientas necesarias para desarrollarme como un ser productivo e independiente, gracias por ese amor incondicional y un gran ejemplo. Los amo papás.. A Uriel por enseñarme a ser humilde y paciente, gracias por los momentos de diversión y. comprensión, te quiero hermano.. Para Andrea y su estimada familia porque han sido parte de mi desarrollo profesional y personal.. A mis familiares, amigos y profesores quienes motivaron y brindaron de forma directa o indirecta enseñanzas para ir en la búsqueda de ser mejor cada día.. Al Instituto Politécnico Nacional por ser esa segunda casa donde cada día se aprende algo nuevo, emocionante y que entrega satisfacción con el fin de transmitirlo a las generaciones venideras y así entregar la técnica al servicio de la patria.. Josue V | Página.
(6) Instituto Politécnico Nacional. ESIME. Dedicatorias A mi madre Sara por la compresión, apoyo y motivación incondicional sin importar mis errores, tu amor siempre me dio la fuerza para seguir de pie cuando había más motivos por no seguir. El día de hoy podemos decir que hemos alcanzado juntos una meta más; Gracias.. A mi padre José Alfredo por enseñarme a diario el camino a seguir para ser una persona honrada, constante y comprometida con mis obligaciones que me han hecho ser la persona que soy hoy. Por ti este logro ha sido alcanzado como tus palabras siempre me han dicho que lograre todos mis propósitos; Gracias.. A mis hermanas, Carolina y Jazmín, por ser mis cómplices a lo largo de mi vida, mis consejeras y mí desahogo, gracias por caminar junto a mí.. Al Instituto Politécnico Nacional, a mis profesores y compañeros por brindarme la mejor experiencia de mi desarrollo profesional y formar un carácter e identidad con gran amor a la alma máter que me hizo crecer. Alfredo VI | Página.
(7) Instituto Politécnico Nacional. ESIME. Agradecimientos Al Instituto Politécnico Nacional y en particular a la Escuela Superior de Ingeniería Mecánica y Eléctrica Unidad Zacatenco por las facilidades que nos otorgaron para que éste trabajo pudiera llevarse a cabo.. Profesores de ESIME Zacatenco por habernos dotado de los conocimientos y teorías necesarias que se ocuparon para este trabajo.. M. en C. José Ernesto Rojas Lima y M. en C. Eric Gómez Gómez, por ser buenos guías, tener siempre críticas constructivas y por su tiempo dedicado para mejorar este trabajo. Así como al resto del equipo de la academia de comunicaciones por las facilidades brindadas durante la realización de este trabajo.. M. en C. Pedro Gustavo Magaña del Río, por hacerse parte de este trabajo y estar al pendiente de nosotros, por su tiempo, agradecemos infinitamente.. Ing. Francisco Hernández Rángel, por el tiempo que nos otorgó para ser juez, siempre constructivo, de este trabajo y a Ing. César Israel Pérez Macías.. Jorge, Josue y Alfredo VII | Página.
(8) Instituto Politécnico Nacional. ESIME. “Implementación de técnicas de modulación digital mediante un generador de señales arbitrarias” VIII | Página.
(9) Instituto Politécnico Nacional. ESIME. OBJETIVO. Integrar experimentalmente una aplicación para generar señales digitales moduladas.. IX | Página.
(10) Instituto Politécnico Nacional. ESIME. Índice Introducción….…..…………………………………………………….…XIV Antecedentes……..………………………………………………………XVII. CAPÍTULO 1: Conceptos básicos de comunicaciones………………19 1.1 Comparación de comunicaciones digitales y analógicas…………………………..20 1.1.1 Ventajas y desventajas de las comunicaciones digitales………………..20 1.2 Diagrama a bloques de un sistema de comunicaciones digital…………………...21 1.3 Clasificación de señales……………………………………………………………….23 1.3.1 Señales analógicas y señales digitales………………………………..…..23 1.3.2 Señales aleatorias y determinísticas……………………………………….24 1.3.3 Señales de energía y señales de potencia………………………………..25 1.4 Fuentes de información………………………………………………………………..27 1.4.1 Fuentes de información continuas………………………………………….27 1.4.2 Fuentes de información discretas……………..……………………………28 1.5 Transmisión en banda base y pasabanda…………………………………………...28 1.5.1 Modulación en banda base….………………………………………………29 1.5.2 Modulación pasabanda……….……………………………………………..29. CAPÍTULO 2: Detección óptima de señales y afectaciones por ruido ….……………………………………………………………………….32 Introducción…………..…………..…………..…………..…………………………………33 2.1 Ruido Blanco Aditivo Gaussiano (AWGN) …………………………………………..33 2.2 Representación de señales en espacios vectoriales ………………………………36. X | Página.
(11) Instituto Politécnico Nacional. ESIME. 2.3 Detección de señales en presencia de AWGN..…………………………………….39 2.3.1 Demodulador por correlación.………………………………………………39 2.3.2 Demodulador mediante filtro acoplado…………..………………………...41 2.3.3 Detector óptimo……………………………………………………………….44 2.4 Probabilidad de error…………………………………………………………………...45 2.4.1 Probabilidad de error para sistemas en banda base……………………..50. CAPÍTULO 3: Técnicas de modulación digital…………………………52 Introducción…………..…………..…………..…………..…………………………………53 3.1 Técnica de modulación ASK coherente……….……………………………………..53 3.1.1 Tasa de error de bit para ASK coherente.…………………………………54 3.1.2 Densidad espectral de potencia para ASK coherente.…………………..55 3.2 Técnica de modulación FSK coherente……………………………………………...56 3.2.1 Tasa de error de bit para FSK coherente………………………………….57 3.2.2 Densidad espectral de potencia para FSK coherente…………………...59 3.3 Técnica de modulación PSK coherente……………………………………………..61 3.3.1 Tasa de error de bit para PSK coherente…...……..…………..………….62 3.3.2 Densidad espectral de potencia para PSK coherente.………..…………63 3.4 Técnica de modulación APK coherente...………..…………..……………………...64 3.4.1 Tasa de error de bit para APK coherente...………..…………..………….67 3.4.2 Densidad espectral de potencia para APK coherente………..…...……..67. CAPÍTULO 4: Desarrollo experimental y resultados………………….70 Introducción…………..…………..…………..…………..…………………………………71 4.1 Descripción de la interfaz gráfica…………..…………..…………..…………………72. XI | Página.
(12) Instituto Politécnico Nacional. ESIME. 4.1.1 Generación de archivo “.txt” con MatLab…………..………………………74 4.2 Condiciones de trabajo de la interfaz gráfica. …………..…………..………………76 4.3 Resultados experimentales…………..…………..…………..…………..…………...77 4.3.1 Análisis en el dominio del tiempo de las señales moduladas……………78 4.3.1.1 Técnica de modulación ASK coherente...………………..……...78 4.3.1.2 Técnica de modulación FSK coherente.……..……………….....81 4.3.1.3 Técnica de modulación PSK coherente.…….............................82 4.3.1.4 Técnica de modulación APK coherente.....................................83 4.4.1 Análisis en el dominio de la frecuencia de las señales moduladas….....84 4.4.1.1 Técnica de modulación ASK coherente.....................................84 4.4.1.1.1 Traslación en frecuencia..............................................84 4.4.1.1.2 Ancho de Banda...........................................................87 4.4.2.2 Técnica de modulación FSK coherente.....................................91 4.4.2.1.1 Traslación en frecuencia..............................................91 4.4.2.2.2 Ancho de Banda...........................................................94 4.4.2.3 Técnica de modulación PSK coherente………………………….96 4.4.2.3.1 Traslación en frecuencia..............................................96 4.4.2.3.2 Ancho de Banda.........................................................100 4.4.2.4 Técnica de modulación APK coherente...................................103 4.4.2.4.1 Traslación en frecuencia............................................103 4.4.2.4.2 Ancho de Banda.........................................................106. Conclusiones.......................................................................................110 Recomendaciones...............................................................................112. XII | Página.
(13) Instituto Politécnico Nacional. ESIME. Anexo 1. Conceptos básicos de probabilidad y estadística..........114 Anexo 2. Transformada de Fourier...................................................118 Anexo 3. Análisis en frecuencia de las codificaciones de línea polar y unipolar.............................................................................................119 Anexo 4. Código de programación usado para gererar la interfaz gráfica...................................................................................................122 Anexo 5. Hoja de datos del generador DG2041A.............................131 Glosario de términos………………….………….……………………….140 Lista de figuras y tablas…………….……………………………………144 Referencias…………………………………………………………………150. XIII | Página.
(14) Instituto Politécnico Nacional. ESIME. Introducción XIV | Página.
(15) Instituto Politécnico Nacional. ESIME. INTRODUCCIÓN. Desde tiempos remotos el ser humano se ha comunicado con sus semejantes para expresar necesidades y experiencias (mensajes); es a partir de estas interacciones que se requirió transmitir información en tiempo y espacio precisos fuera a distancias cortas o extensas. Posteriormente se buscó ahorrar recursos, recibir y enviar mensajes con una calidad tal que permitiera su interpretación inmediata con grandes volúmenes de información.. Generalmente el logro de la transmisión debe sustentarse en dos premisas que son bajo costo y satisfacción de los usuarios.. Según la ATIS (Alliance for Telecommunications Industry Solutions), el concepto de modulación se define como: The process, or result of the process, of varying a characteristic of a carrier, in accordance with an information-bearing signal. (El proceso, o resultado, de variar una característica de una señal portadora de acuerdo a una señal de información).. En la era digital se enfrentan los mismos desafíos; pero ahora han de considerarse para diversas técnicas de modulación digital. Éstas no sólo permiten un intercambio de información funcional integral, óptima, sino que además consiguen un mejor rendimiento y resultados.. Es evidente que el cambio tecnológico exige a profesores y estudiantes de comunicaciones abundar más sobre la teoría y práctica con el propósito de conocer cómo operan estos sistemas y obtener su mayor rendimiento.. Por lo anterior, es interesante y muy conveniente poder tener generadores de señales digitales moduladas en las carreras especializadas de comunicaciones, con las cuales se puedan realizar pruebas modificando parámetros y haciendo interactuar con los diferentes sistemas disponibles en los laboratorios para obtener múltiples beneficios, como lo son el aprovechamiento, la comprensión y el aprendizaje de calidad.. Se pueden desarrollar numerosos experimentos, diseño de sistemas, análisis de los que ya se encuentran en funcionamiento, etc. Todo esto con un mayor grado de precisión, lo cual es bastante. XV | Página.
(16) Instituto Politécnico Nacional. ESIME. benéfico para que estos experimentos y simulaciones permitan semejar de manera más cercana las situaciones de la vida cotidiana y en general es las aplicaciones y los sistemas reales.. XVI | Página.
(17) Instituto Politécnico Nacional. ESIME. Antecedentes XVII | Página.
(18) Instituto Politécnico Nacional. ESIME. ANTECEDENTES. Las instituciones de educación superior del sector público de nuestro país se caracterizan por la alta dependencia de los presupuestos para el equipamiento necesario de los laboratorios existentes, más aun cuando se trata de especialización técnica, por lo que es común que se usen al máximo los recursos existentes para impartir las prácticas de las materias en los planteles que así lo indiquen.. Dado que las limitaciones no pueden evitarse lo más recomendable es tenerlas en consideración y hacer un reconocimiento previo de los equipos con los que se cuenta en el laboratorio de comunicaciones de la Escuela Superior de Ingeniería Mecánica y Eléctrica unidad Zacatenco del Instituto Politécnico Nacional. Luego entonces, profesores y alumnos podrían proponer desarrollos que modifiquen o adapten las prácticas a fin de que, en lo sucesivo, sean útiles para las generaciones venideras. El hecho de que se extiendan o escalen las funciones de los instrumentos de medición redundará en su máximo aprovechamiento lo que a su vez repercutirá en un mayor aprovechamiento académico. Teoría y práctica serán una unidad en la que ambos aspectos se complementen y correspondan entre sí.. Extender y/o escalar las funciones de los instrumentos de medición implicarán un mejor equipamiento del laboratorio que permita un máximo aprovechamiento del mismo dando como resultado beneficios académicos derivados de mayores posibilidades para prácticas y por ende una mejor comprensión de la teoría adquirida en clase, por ello también alumnos, profesores, auxiliares y jefes de laboratorio han despertado en su interior las ganas por contribuir al mejor aprovechamiento de los equipos existentes en las instalaciones de los laboratorios.. XVIII | Página.
(19) CAPÍTULO 1 | “Conceptos básicos de comunicaciones”.
(20) Instituto Politécnico Nacional. ESIME. 1.1 Comparación de comunicaciones digitales y analógicas El papel de las comunicaciones en la vida del ser humano ha sido determinante, pues han posibilitado el intercambio de información a distancia de manera eficiente. La necesidad de comunicarse acompaña a las sociedades desde tiempos remotos porque los grupos humanos se transmiten entre sí las experiencias y conocimientos que, al final, han favorecido el progreso y la evolución en diferentes ámbitos de la vida.. La diferencia entre las comunicaciones digitales y analógicas radica principalmente en la forma de la señal que se ocupa para ejecutar el proceso transmisión/recepción de la información: señales analógicas y señales digitales. Ambos sistemas se sirven de señales eléctricas para lograr su tarea.. El hombre ha sabido adaptarse al uso de la tecnología que, en los últimos tiempos, ha experimentado transformaciones radicales. Específicamente, en el área de las comunicaciones, estos cambios son notables cuando se habla de comunicaciones analógico/digitales. A pesar de que los avances tecnológicos influyen en el desplazamiento de las comunicaciones analógicas y en la migración de éstas hacia las tecnologías digitales de comunicaciones.. 1.1.1 Ventajas y desventajas de las comunicaciones digitales El uso de un sistema de comunicaciones dependerá de las ventajas y desventajas que proporcione para la aplicación que requiera su empleo. Conocer cada una de ellas es imprescindible, porque de esto dependerá el rendimiento del sistema a lo largo de su uso. En la tabla 1.1.1 se enlistan las ventajas y desventajas de un sistema de comunicaciones digitales.. - 20 - | Página.
(21) Instituto Politécnico Nacional. ESIME. Tabla 1.1.1. Ventajas y desventajas de un sistema de comunicaciones digitales.. VENTAJAS Y DESVENTAJAS DE UN SISTEMA DE COMUNICACIONES DIGITALES.. 1.2. VENTAJAS. DESVENTAJAS. Posibilidad de implementar el uso de circuitos electrónicos digitales.. La detección de señales precisa el uso de un sistema de sincronización.. Uso de codificación para mejorar el rendimiento de error.. Necesidad del uso de convertidores A/D ó D/A.. Facilidad de regenerar las señales digitales.. Dificultad de trabajar con sistemas analógicos existentes.. Facilidad de mezclar y transmitir señales de diferentes servicios.. Complejidad.. Facilidad de convertir señales analógicas a señales digitales.. Incremento en el ancho de banda.. Diagrama a bloques de un sistema de comunicaciones digital. Los sistemas de comunicación están diseñados para transmitir información. Los diseñadores de sistemas de comunicación tienen de forma general los siguientes intereses:. . La selección de la forma de onda que contendrá la información.. . El ancho de banda y la potencia de la forma de onda.. . El efecto del ruido en la información recibida.. . El costo del sistema.. Sin importar cual sea su aplicación en particular, todos los sistemas de comunicaciones involucran tres subsistemas principalmente: transmisor, canal y receptor.. La figura 1.2.1 ilustra el conjunto de bloques que conforman un sistema de comunicaciones digitales. El primer bloque funcional presenta la codificación de la fuente, cuya función es convertir una señal analógica en un código digital, característica que lo define como sistema digital. El bloque de encriptación, por su parte, protege la información a fin de que receptores no autorizados descifren el. - 21 - | Página.
(22) Instituto Politécnico Nacional. ESIME. mensaje. La codificación de canal introduce redundancia de modo que si ocurre un error en el canal de comunicaciones podrá detectarse y corregirse.. Figura 1.2.1. Diagrama de sistemas de comunicaciones imagen. Juan José M. Radiación y Radiocomunicación.. La multicanalización permite conjuntar las señales de diferentes fuentes que requieren enviarse en una sola señal. El bloque de modulación, y su correspondiente en la recepción, es decir, la demodulación son esenciales en todo sistema de comunicaciones, ya que éste adapta la señal digital a una señal acondicionada al sistema utilizado. El bloque de múltiple acceso posibilita que diferentes usuarios compartan el mismo canal de comunicaciones para optimizarlo.. Nota: Cada uno de los bloques tiene su par en la recepción, donde tiene lugar el trabajo inverso que el transmisor ejecuta.. - 22 - | Página.
(23) Instituto Politécnico Nacional. 1.3. ESIME. Clasificación de señales. Una señal es una cantidad física de información o de datos que varia con el tiempo, el espacio o cualquier otra variable dependiente. Algunos ejemplos son las señales de comunicaciones telefónicas (la marcación y la voz) o señales de televisión, las cifras de venta mensual de una corporación o empresa y precios de cierre de la bolsa de valores, por mencionar algunos.. Existe un amplio mundo de clases de señales. Aquí solo se considerarán los siguientes pares:. . Señales analógicas y señales digitales.. . Señales continuas y discretas, ambas en tiempo.. . Señales periódicas y aperiódicas o no periódicas.. . Señales de energía y potencia.. . Señales aleatorias y determinísticas.. 1.3.1 Señales analógicas y señales digitales. Una señal cuya amplitud toma cualquier valor en intervalos continuos de amplitudes en cualquier instante de tiempo es una señal analógica. Esto significa que la amplitud de una señal analógica puede tomar un número infinito de valores y que, matemáticamente, se definen como funciones continuas de la variable continua tiempo. Una señal digital, por su parte, es una señal cuya amplitud toma sólo un número finito de valores.. Las señales digitales toman sólo algunos valores en amplitud; aquellas señales digitales cuyas amplitudes pueden tomar M valores son llamadas M-arias (M=2, en el caso de señales binarias). Los términos “continuo en tiempo” y “discreto en tiempo” califican la naturaleza de las señales a lo largo del tiempo (eje horizontal). Los términos “analógico” y “digital”, por otra parte, describen la naturaleza de la amplitud de la señal (eje vertical) [2]. En la figura 1.3.1. se muestran los diferentes tipos de señales en los que se observan los diferentes casos en cuando puede ser analógica y continua o discreta en el tiempo (a) y (c), o de cuándo puede ser digital y continua o discreta en el tiempo (b) y (d).. - 23 - | Página.
(24) ESIME. Instituto Politécnico Nacional. g(t). g(t). t. b). t. a) g(t). g(t). t. c). t. d). Figura 1.3.1. Ejemplos de señales: (a) analógica y continuo en tiempo, (b) digital y continuo en tiempo, (c) analógica y discreta en tiempo y (d) digital y discreta en tiempo.. 1.3.2 Señales aleatorias y determinísticas Las señales aleatorias son funciones que dependen del tiempo y no es posible conocer su comportamiento porque no es predecible. Así que para describirlas es preciso sujetarlas a un análisis estadístico o recurrir a sus propiedades espectrales. Algunos ejemplos de este tipo de señales son las de voz y de ruido.. g(t). g(t). t Figura 1.3.2. Ejemplos gráficos de señales aleatorias.. - 24 - | Página. t.
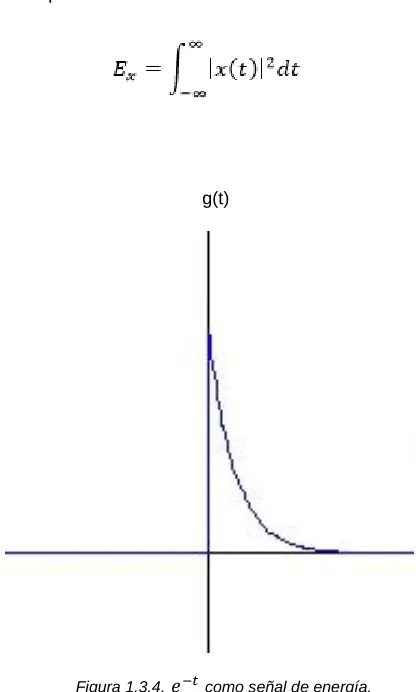
(25) Instituto Politécnico Nacional. ESIME. Una señal determinística es aquella que tiene y/o toma valores que pueden ser predecibles en su evolución a lo largo del eje temporal mediante modelos matemáticos; sus valores futuros se determinan si se conoce el comportamiento de la señal. Como ejemplos básicos ténganse en cuenta las funciones seno y coseno de la figura 1.3.3. g(t). t. a). Para. −∞ < 𝑡 < ∞ g(t). t. b). Para. −∞ < 𝑡 < ∞ Figura 1.3.3. Ejemplos gráficos de señales determinísticas a) cos(t), b) sen(t).. 1.3.3 Señales de energía y señales de potencia Las señales de energía y de potencia son mutuamente excluyentes, es decir, si una señal es de energía, entonces no podrá ser de potencia y viceversa. Como regla general, se puede afirmar lo siguiente: . Las señales periódicas y aleatorias son señales de potencia.. . Las señales determinísticas y no periódicas son señales de energía.. Una señal 𝑥(𝑡) , es una señal de energía cuando su energía normalizada es finita y diferente de cero, o sea, si cumple con las siguientes condiciones:. 0 < 𝐸𝑥 < ∞. - 25 - | Página. (1.3.3.1).
(26) Instituto Politécnico Nacional. ESIME. Esto implica que:. 𝑃𝑥 = 0. (1.3.3.2). Donde la energía se determina por medio de:. (1.3.3.3). g(t). Figura 1.3.4.. 𝑒 −𝑡. como señal de energía.. Una señal x(t) es una señal de potencia si tiene energía infinita con potencia promedio finita.. 0 < 𝑃𝑥 < ∞. (1.3.34). 𝐸𝑥 = ∞. (1.3.3.5). Lo cual implica que:. Donde la potencia P de la señal, se define como:. - 26 - | Página.
(27) ESIME. Instituto Politécnico Nacional. T. 𝑃𝑥 =. 1 2 lim ∫−T |x(t)|2 dt T→∞ T 2. Px es conocida como potencia promedio normalizada, ya que es una potencia disipada por una resistencia de 1 ohm. Por otro lado, para señales periódicas de periodo fundamental 𝑇0 se puede demostrar que la potencia es: 𝑇0 2. 𝑃𝑥 =. 1 ∫ |𝑥(𝑡)|2 𝑑𝑡 𝑇0 𝑇 − 20. g(t). t. Figura 1.3.5. cos(t) como señal de potencia.. 1.4. Fuentes de información. Los sistemas de comunicaciones intercambian información que se genera por medio de fuentes. Las fuentes de información son dispositivos/objetos naturales o mecánicos con capacidad de crear/producir eventos estadísticos a su salida. Dada su naturaleza aleatoria, la salida generalmente es procesada de acuerdo a una distribución de probabilidad. En otras palabras, es uno de los elementos del sistema de comunicaciones, que produce mensajes. La salida de las fuentes de información, puede adoptar varias formas, dependiendo de la naturaleza de la fuente. En este sentido, las fuentes pueden clasificarse en dos tipos: continuas y discretas, estas últimas a su vez, se dividen en discretas con memoria y sin memoria.. 1.4.1 Fuentes de información continuas Son aquellas fuentes que producen mensajes en forma de señales analógicas y generan un número infinito de mensajes como posibles salidas. La salida es función de un proceso aleatorio. Éste, a su vez, es la función de dos variables: tiempo y espacio muestral (Figura 1.4.1.).. - 27 - | Página.
(28) ESIME. Instituto Politécnico Nacional. 𝒔𝟏. 𝒔𝒏. . . .. 𝒔𝟐. . . .. 𝒙𝟏 (𝒕). 𝒙𝟏 (𝒕𝒌). 𝒙𝟐 (𝒕). 𝒙𝟐 (𝒕𝒌). 𝒙𝒏 (𝒕). . . .. 𝒙𝒏 (𝒕𝒌). 𝒕𝒌. 𝒕. +𝑻. Figura 1.4.1. Proceso aleatorio.. Donde algunos ejemplos prácticos de este tipo de fuentes se pueden citar como fuentes de audio para radiodifusión y fuentes de vídeo, donde la salida de la fuente es imagen en movimiento.. 1.4.2 Fuentes de información discretas Este tipo de dispositivos generan salidas aleatorias y discretas que generalmente forman parte de un conjunto finito de un alfabeto, por ejemplo, el código binario y el código ASCII. Algunos ejemplos de las fuentes de información discretas son las computadoras y los sistemas de almacenamiento masivo.. 1.5 Transmisión en banda base y pasabanda Dependiendo del tipo de servicio o de los requerimientos del sistema de comunicaciones digitales es posible elegir entre dos técnicas de transmisión que son: modulación en banda base y modulación pasabanda.. - 28 - | Página.
(29) Instituto Politécnico Nacional. ESIME. 1.5.1 Modulación en banda base Las señales en banda base no pueden ser modificadas por ningún proceso que altere sus parámetros como frecuencia, fase y/o amplitud a la salida de la fuente que las origine. Transmitidas con sus parámetros originales, estas señales son codificadas, lo que da lugar a los códigos en banda base. La modulación en banda base, no se ocupa en aplicaciones de radio pues las ondas de salida de la fuente de información no tienen la suficiente potencia y/o energía para ser transmitida; aunque también es utilizada en aplicaciones donde la distancia entre transmisor y receptor es pequeña, como los módems. Si una señal es transmitida en banda base es más susceptible al ruido y otras afectaciones.. Algunos ejemplos de señales digitales en banda base son la PCM y señales codificadas con códigos de línea. En el siguiente esquema de la figura 1.5.1 se ilustran algunos tipos de codificación de pulsos como ejemplos de modulación en banda base. Datos binarios T. a). b). c). d). e) Figura1.5.1. Tipos de codificación de pulsos como ejemplos de modulación en banda base.. 1.5.2 Modulación pasabanda La modulación pasabanda implica un proceso que genera cambios en la señal original antes de ser transmitida. Esta última contiene información denominada modulante/moduladora en parámetros como la fase, frecuencia y/o amplitud modificados gracias a una señal portadora que generalmente. - 29 - | Página.
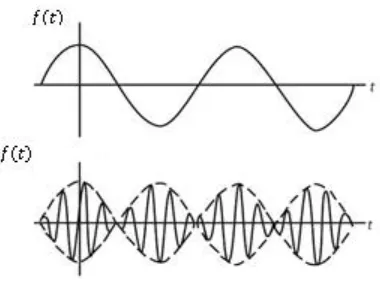
(30) Instituto Politécnico Nacional. ESIME. tiene una frecuencia más alta que la señal moduladora. Dependiendo de la técnica de modulación requerida, habitualmente se recurre a la transmisión pasabanda de las señales para facilitar y/o adecuar la información de entrada a fin de hacer de su transmisión un proceso más sencillo, ya que por medio de estas técnicas pueden distribuirse canales distintos para diferentes señales. Otras ventajas que ofrece la modulación pasabanda son: evita interferencias entre canales, protege información de las afectaciones por ruido, brinda calidad a la señal transmitida y reduce el tamaño de antenas. La modulación pasabanda es un proceso que puede presentarse en un sistema analógico o digital de comunicaciones. En la tabla 1.5.1 se enlistan diversas técnicas de modulación analógica y digital.. Tabla 1.5.1. Ejemplos de modulaciones analógicas y digitales.. TÉCNICAS DE MODULACIONES ANALÓGICAS. DIGITALES. AM: Modulación por amplitud.. ASK: Amplitude Shift Keying. FM: Modulación por frecuencia. FSK: Frecuency Shift Keying. PM: modulación por fase. PSK: Phase Shift Keying QAM: Quadrature Amplitude Modulation QPSK: Quadrature Phase Shift Keying. Figura 1.5.1. (a). Formas de onda resultantes de las modulaciones analógicas: AM.. - 30 - | Página.
(31) Instituto Politécnico Nacional. ESIME. Figura 1.5.1. (b). Formas de onda resultantes de las modulaciones analógicas: FM y PM.. Figura 1.5.2. Formas de onda resultantes de las modulaciones digitales: a) ASK, b) FSK, c) PSK, d) APK las cuales en los posteriores capítulos se presentaran específicamente.. Cada una de las técnicas guarda una relación estrecha entre sí y permiten un desplazamiento del espectro de la señal de información, lo que hace que se optimice y, al mismo tiempo, favorezca la transmisión de más señales a través de éste.. - 31 - | Página.
(32) Instituto Politécnico Nacional. ESIME. CAPÍTULO 2 | “Detección óptima de señales y afectaciones por ruido” - 32 - | Página.
(33) Instituto Politécnico Nacional. ESIME. Introducción Dado que toda señal de información transmitida por un canal de comunicaciones llega alterada a su destino la recuperación de la información original se dificulta. Dos factores son las causas principales: 1) La distorsión debida al canal y sus características físicas. 2) Las alteraciones provocadas por señales aleatorias que se suman a las señales originales. Ambas afectaciones reciben el nombre de ruido.. El ruido restringe la capacidad de comunicación. Si el ruido no existiera la comunicación electrónica, más allá de los límites del universo, sería posible utilizando una cantidad de potencia infinitamente pequeña. Esto ha sido obvio desde los primeros días de la radio. Sin embargo, la teoría que describe al ruido y su efecto en la transmisión de información no fue desarrollada sino hasta la década de los años cuarenta por autores como D. O. North en 1943, S. O. Rice en 1944, C. E. Shannon en 1948 y N. Wiener en 1949, quienes en sus investigaciones señalan que es de suma importancia conocer los efectos del ruido en la información recibida entre otras.. [3]. 2.1 Ruido Blanco Aditivo Gaussiano (AWGN) El ruido térmico —que se debe al constante movimiento aleatorio de los electrones libres, como consecuencia de la energía térmica—, es uno de los tipos de ruido que deben tomarse en cuenta. Considerando los estudios hechos por J. B. Johnson en 1928, H. Nyquist en 1928 y Schwartz en 1980 se define la densidad espectral del ruido térmico en una resistencia como: [4]. 𝑆𝑛 (𝑓) = 𝑘𝑇𝑅. (2.1.1). Donde k es la constante de Boltzman que vale 1.38𝑥10−23 𝐽𝑜𝑢𝑙𝑒𝑠⁄𝐾, R es la resistencia (medida en Ohms), T es la temperatura en la resistencia en grados Kelvins. Esta expresión es válida para la condición: 𝑓 ≪ 10−13 𝐻𝑧. Dentro de esta condición la densidad espectral de ruido se puede considerar constante e independiente de la frecuencia.. - 33 - | Página.
(34) Instituto Politécnico Nacional. ESIME. Al ser resultado de diferentes interacciones independientes presenta una distribucion gaussiana. Una distribucion gaussiana es aquella en la que la distribucion de las amplitudes sigue la curva de Gauss.. El ruido blanco proviene de varias fuentes de ruido gaussianas, de valor promedio cero y densidad espectral de potencia constante en una extensa gama de frecuencias, en analogía a la luz blanca, que posee todas las frecuencias del rango del espectro visible.. La densidad espectral del ruido blanco gaussiano para toda frecuencia se representa por la ecuación 2.1.2 y, gráficamente, por la figura 2.1.1.. 𝑆𝑛 (𝑓) =. 𝜂 2. 𝑁0 2. =. [𝑊⁄𝐻𝑧 ]. (2.1.2). 𝑆𝑛 (𝑓) 𝜂 𝑁0 = 2 2. 0. 𝑓. Figura 2.1.1. Densidad espectral de potencia del ruido blanco.. Se incluye el factor ½ para indicar que la mitad de la potencia está asociada con las frecuencias positivas, y la otra mitad con las frecuencias negativas. El valor de 𝜂 = 𝑁0 depende de la fuente de ruido y tiene dimensiones de W/Hz.. Si se tienen dos sistemas, uno libre de ruido, y otro con una potencia de ruido disipada, se puede decir que el segundo tiene una “temperatura equivalente de ruido” (𝑇𝑒 ), que sería la temperatura que tendría que alcanzar el sistema libre de ruido, para que se igualara la potencia de éste en los dos sistemas y se define como:. 𝑇𝑒 = 4𝑅𝑇. (2.1.3). Cuando una fuente de ruido blanco es filtrada, la densidad espectral de amplitud constante tomará la forma del filtro cuya densidad espectral está dada por la ecuación 2.1.4:. 𝑁𝑖 = 4𝑇𝑒 𝐵. - 34 - | Página. (2.1.4).
(35) Instituto Politécnico Nacional. ESIME. Donde B es el ancho de banda.. El teorema de Wiener-Kintchine establece a la función de autocorrelación con la ecuación 2.1.5 y gráficamente con la figura 2.1.2; por medio de la transformada inversa de Fourier de la expresión 2.1.2, lo que deriva en una función de autocorrelación como se muestra a continuación.. 𝑅𝑛 (𝜏) =. 𝑁0 𝛿(τ) 2. (2.1.5). 𝑅𝑛 (𝜏). 𝑁0 2. 0. 𝜏. Figura 2.1.2. Función de autocorrelación del ruido blanco gaussiano.. Se puede observar que para toda 𝜏 ≠ 0 la función vale cero, por lo que dos muestras diferentes de la señal de ruido no están correlacionadas y son independientes.. El ruido blanco aditivo gaussiano es un factor que debe tenerse muy en cuenta en los sistemas de comunicación, ya que su densidad espectral de potencia se considera constante dentro de la gama de frecuencias usadas en la práctica y representa un límite de referencia a superar para el cálculo de las relaciones Señal/Ruido en sistemas de comunicación.. El modelo de una señal recibida que pasa a través de un canal con ruido blanco aditivo gaussiano se representa en la figura 2.1.3.. Figura 2.1.3. Canal con ruido blanco aditivo Gaussiano.. - 35 - | Página.
(36) ESIME. Instituto Politécnico Nacional. La señal recibida siempre será la suma de la señal transmitida más el ruido del sistema, de ahí la propiedad de aditivo, ya que siempre estará sumándose de manera que afecta a la señal original. Por este motivo es que se requieren sistemas con características que permitan una óptima detección de las señales, aunque sean afectados por el ruido blanco gaussiano.. 2.2 Representación de señales en espacios vectoriales Es importante visualizar un conjunto de señales de energía geometricamente porque ello proporciona una base matemática para que las señales se representen gráficamente en un espacio N-dimensional, con el objeto de hacer un análisis conceptualmente satisfactorio de ruido de los sistemas de comunicaciones digitales.. De manera general, la representación de señales en espacios vectoriales consiste en representar un conjunto de M señales de energía {𝑠𝑖 (𝑡)} como diferentes combinaciones lineales de N funciones con base ortonormal, en donde N≤M. Luego entonces, se puede definir un conjunto de señales de energía de valor real y con duración T como: 0≤𝑡≤𝑇 𝑆𝑖 = ∑𝑁 𝑗=1 𝑠𝑖𝑗 𝜑𝑗 (𝑡 ) {𝑖 = 1,2, … 𝑀 } Y los coeficientes de la sumatoria se definen como: 𝑇. 𝑠𝑖𝑗 = ∫ 𝑠𝑖 (𝑡)𝜑𝑗 (𝑡)𝑑𝑡, { 0. 𝑖 = 1,2, … , 𝑀 } 𝑗 = 1,2, … 𝑁. Las funciones 𝜑 son funciones de valor real ortonormales entre sí, por lo tanto: 𝑇 1 𝑠𝑖 𝑖 = 𝑗 ∫ 𝜑𝑖 (𝑡)𝜑𝑗 (𝑡) 𝑑𝑡 = { } 0 𝑠𝑖 𝑖 ≠ 𝑗 0. Es evidente que el conjunto 𝑠𝑖𝑗 representa un vector N-dimensional, denotado 𝑠𝑖 por lo tanto, cada señal determinada en el conjuto 𝑠𝑖 (𝑡) es determinada por un vector a partir de sus coeficientes:. - 36 - | Página.
(37) ESIME. Instituto Politécnico Nacional. 𝑠𝑖1 𝑠𝑖2 𝑠𝑖3 𝑠𝑖 = . . . [𝑠𝑖𝑁 ] Donde i=1, 2, 3,...,M y el vector 𝑠𝑖 se denomina. (2.2.4). vector señal. A partir de una noción. conceptual/convencional de espacios euclidianos de 2 y 3 dimensiones, puede observarse uno Ndimensional, donde se visualiza un conjunto de vectores señal 𝑠𝑖 el cual define M puntos en éste espacio, el cual tendrá N ejes perpendiculares 𝜑1 , 𝜑2 , … , 𝜑𝑁 . A este espacio se le denominará espacio de señales. En este contexto, se ha dicho que las señales serán representadas por vectores en un espacio euclidiano N-dimensional. En éste se pueden definir las magnitudes (valor absoluto) y los ángulos entre vectores. La magnitud de un vector se define matemáticamente como el producto punto de éste.. Generalizando para N dimensiones: 2 ∑𝑁 𝑗=1 𝑠𝑖𝑗 𝑝𝑎𝑟𝑎 𝑖 = 1, 2, … , 𝑀. (2.2.5). Y el contenido de energía de una señal de T segundos, se define como: 𝑇. 𝐸𝑖 = ∫ 𝑠𝑖2 (𝑡)𝑑𝑡 0. Por lo tanto, de manera general para N dimensiones, al sustituir la ecuación 2.2.1 en la ecuación 2.2.6 se obtiene la siguiente expresión:. 𝑇. 𝑁. 𝑁. 𝐸𝑖 = ∫ [∑ 𝑆𝑖𝑗 𝜑𝑗 (𝑡)] [∑ 𝑆𝑖𝑘 𝜑𝑘 (𝑡)] 𝑑𝑡 0. 𝑗=1. Reordenando y reagrupando la ecuación 2.2.6:. - 37 - | Página. 𝑘=1.
(38) Instituto Politécnico Nacional. ESIME. 𝑁. 𝑁. 𝑇. 𝐸𝑖 = ∑ ∑ 𝑆𝑖𝑗 𝑆𝑖𝑘 ∫ 𝜑𝑗 (𝑡)𝜑𝑘 (𝑡)𝑑𝑡 0. 𝑗=1 𝑘=1. Ya que las funciones 𝜑 son ortonormales, el producto interior de las mismas es igual a 1, por lo tanto se puede reescribir la ecuación para la energía como: 2 𝐸𝑖 = ∑𝑁 𝑗=1 𝑆𝑖𝑗. De donde se puede deducir, para una dimensión N=1 que:. ‖𝑆𝑖‖2. (2.2.10). De la ecuación 2.2.9 puede deducirse que la energía de un vector de señal es equivalente a la magnitud de este vector (el producto interno del mismo), o bien la energía de la señal es igual a la longitud del vector que la está representando.. La representación geométrica entre vectores se completa con la definición de un ángulo entre éstos, por definición el ángulo puede representarse mediante la siguiente expresión matemática: 𝑆𝑆. 𝑖 𝑘 cos 𝜃𝑖𝑘 = ‖𝑆 ‖‖𝑆 𝑖. (2.2.11). 𝑘‖. Ya que 𝑆𝑖 𝑦 𝑆𝑘 son vectores perpendiculares entre sí, el producto interno entre éstos, será igual a 1, por lo tanto, se satisace que 𝜃𝑖𝑘 =90°. ∅2. 𝑠22. 𝑆2 𝑆1. 𝑠12. 0. 𝑠21. 𝑠11. ∅1. Figura 2.2.2. Representación vectorial de señales por medio de sus componentes en el eje horizontal, vertical y un ángulo.. - 38 - | Página.
(39) ESIME. Instituto Politécnico Nacional. 2.3 Detección de señales en presencia de AWGN En el ámbito de las comunicaciones uno de los principales retos es contar con receptores que sean lo suficientemente óptimos en la detección que reduzca al máximo la probabilidad de cometer un error. Para ciertos fines conviene dividir la parte de receptor en dos bloques: demodulador de señal y el detector. Las principales funciones de estos serán, para el demodulador, convertir la forma de onda 𝑟(𝑡) en un vector N-dimensional 𝑟 = [𝑟1 , 𝑟2 , … , 𝑟𝑁 ], donde N es la dimensión de la señal transmitida. En el caso del detector su función consiste en decidir cuál de las M posibles señales fue transmitida en base del vector r.. Señal recibida. Salida de decición. Demodulador de señal. Detector. 𝒓(𝒕) Figura 2.3.1. Configuración del receptor.. 2.3.1 Demodulador por correlación El demodulador divide la señal recibida y el ruido en vectores N-dimensionales, es decir, la señal y el ruido se expanden en una serie de funciones de base ortonormales ponderadas {𝑓𝑛 (𝑡)}. {𝑓𝑛 (𝑡)}. Se asume que las N funciones base {𝑓𝑛 (𝑡)} abarcan el espacio de la señal, de tal manera que cada una de las posibles señales transmitidas del conjunto {𝑠𝑚 (𝑡), 1 ≤ 𝑚 ≤ 𝑀 } pueda ser representado como una combinación lineal ponderada de {𝑓𝑛 (𝑡)}. En el caso del ruido, las funciones {𝑓𝑛 (𝑡)} no abarcan el espacio de ruido. En la figura 2.3.1 se observa como la señal recibida r(t) pasa a través de un banco paralelo de correlación cruzada que procesa la proyección de r(t) en N funciones base {𝑓𝑛 (𝑡)}. 𝑓1 (𝑡). ×. 𝑇. ∫ 𝑓1 (𝑡)𝑑𝑡. 𝑟1. 0. ×. ×. 𝑟2. 0. 𝑇. ∫ 𝑓𝑛 (𝑡)𝑑𝑡. …. 𝑓𝑛 (𝑡). 𝑇. ∫ 𝑓2 (𝑡)𝑑𝑡. …. …. Señal recibida 𝑟(𝑡). 𝑓2 (𝑡). A detector. 𝑟𝑛. 0. Muestreo a 𝑡=𝑇 Figura 2.3.1. Modelo del demodulador tipo de correlación.. - 39 - | Página.
(40) ESIME. Instituto Politécnico Nacional. De esto se tiene: 𝑇. 𝑇. ∫0 𝑟(𝑡)𝑓𝑘 (𝑡) = ∫0 [𝑆𝑚 (𝑡) + 𝑛(𝑡)]𝑓𝑘 (𝑡)𝑑𝑡 Donde:. 𝑟𝑘 = 𝑠𝑚𝑘 + 𝑛𝑘 Y: 𝑇. 𝑆𝑚𝑘 = ∫ 𝑆𝑚 (𝑡)𝑓𝑘 (𝑡)𝑑𝑡 0. 𝑇. 𝑛𝑘 = ∫ 𝑛(𝑡) 𝑓𝑘 (𝑡)𝑑𝑡 0. La señal se representa ahora por el vector 𝑠𝑚 con componentes 𝑠𝑚𝑘 , 𝑘 = 1,2, … , 𝑁. Sus valores dependerán en cúal de las M señales fue transmitida. Las componentes 𝑛𝑘 son variables aleatorias que surgen de la presencia del ruido aditivo. La expresión de la señal recibida r (t) en el intervalo 0 ≤ t ≤ T, se puede expresar de la siguiente manera: 𝑁. 𝑟(𝑡) = ∑ 𝑟𝑘 𝑓𝑘 (𝑡) + 𝑛′(𝑡) 𝑘=1. Donde: 𝑁. 𝑛′ (𝑡). = 𝑛(𝑡) − ∑ 𝑛𝑓𝑘 (𝑡) 𝑘=1. Que representa la diferencia entre el ruido original y la parte correspondiente a la proyección de este en las funciones bases {𝑓𝑘 (𝑡)}. Las salidas de correlación {rk} son suficientemente estáticas para alcanzar la decisión de en qué M señales fue transmitida. Como no hay información relevante que extraer del ruido restante procesado n’(t):. 𝐸(𝑟𝑘 ) = 𝐸(𝑠𝑚𝑘 + 𝑛𝑘 ) = 𝑠𝑚𝑘 E igual varianza:. - 40 - | Página. (2.3.1.5).
(41) Instituto Politécnico Nacional. ESIME. 1 2. 𝜎𝑟2 = 𝜎𝑛2 = = 𝑁0. (2.3.1.6). Las salidas de correlación (r1, r2, … , rn) son suficientemente estáticas para alcanzar la decisión de en qué M señales fue transmitida. Como no hay información relevante que extraer del ruido restante procesado n’(t): 1 2. 1 2. 𝐸[𝑛′ (𝑡)𝑟𝑘 ] = 𝐸[𝑛′ (𝑡)]𝑠𝑚𝑘 + 𝐸[𝑛′ (𝑡)𝑛𝑘 ] = 𝑁0 𝑓𝑘 (𝑡) − 𝑁0 𝑓𝑘 (𝑡) = 0. (2.3.1.7). Como n’(t) y {rk} son gaussianas y sin correlacion, son también estadísticamente independientes, por lo que n’(t) no contiene ninguna información que sea relevante a la decisión de cual señal fue la transmitida. Toda la información se concentra en {rk} y n’(t) debe de ser ignorada.. 2.3.2 Demodulador mediante filtro acoplado En este demodulador se usa un banco de N filtros lineales. Se supone que la respuesta al impulso de los N filtros es:. ℎ𝑘 (𝑡) = 𝑓𝑘 (𝑇 − 𝑡),. 0≤𝑡≤𝑇. (2.3.2.1). Figura 2.3.2. a) Señal s(t); b) Respuesta al impulso del filtro acoplado a s(t).. Donde {𝑓𝑘 (𝑡)} son las N funciones base y ℎ𝑘 (𝑡) = 0 fuera del intervalo 0 ≤ 𝑡 ≤ 𝑇. Las salidas de los filtros son: 𝑡. 𝑡. 𝑦𝑘 (𝑡) = ∫ 𝑟(𝜏)ℎ𝑘 (1 − 𝜏)𝑑𝜏 = ∫ 𝑟(𝜏)𝑓𝑘 (𝑇 − 1 − 𝜏)𝑑𝜏 0. 0. 𝑘 = 1,2, … , 𝑁. - 41 - | Página.
(42) Instituto Politécnico Nacional. ESIME. Si se muestrea la salida de los filtros para t=T, se tiene: 𝑇. 𝑦𝑘 (𝑇) = ∫ 𝑟(𝜏)𝑓𝑘 (𝜏)𝑑𝜏 = 𝑟𝑘 0. 𝑘 = 1,2, … , 𝑁 Por lo tanto las salidas de los filtros en t=T son exactamente el conjunto de valores {rk} obtenido de las N correlaciones lineales. El filtro cuya respuesta al impulso es h(T)=s(T-t), donde se asume que s(t) esta confinada en el intervalo 0 ≤ t ≤ T, se llama filtro acoplado a s(t).. La respuesta de h(t)=s(T-t) a la señal s(t) es: 𝑡. 𝑦(𝑡) = ∫ 𝑠(𝜏)𝑠(𝑇 − 𝑡 − 𝜏)𝑑𝜏 0. Que es la función de correlación de la señal s(t).. El filtro acoplado puede representarse como se muestra en la figura 2.3.3.. 𝑟1. 𝑓1 (𝑇 − 𝑡). Señal recibida 𝑟(𝑡). 𝑟2. 𝑓2 (𝑇 − 𝑡). …. …. 𝑟𝑛. 𝑓𝑛 (𝑇 − 𝑡). Muestreo a 𝑡 = 𝑇 Figura 2.3.3. Demodulador por filtro acoplado.. Cuando una señal s(t) se ve afectada por el AWGN, el filtro acoplado con respuesta al impulso s(t) maximiza la relación señal a ruido de la salida en el instante de muestreo t=T. La respuesta del filtro al aplicar una señal afectada por el ruido, r(t)=s(t)+n(t), será:. - 42 - | Página.
(43) ESIME. Instituto Politécnico Nacional. 𝑡. 𝑡. 𝑦(𝑡) = ∫ 𝑠(𝜏)ℎ(𝑡 − 𝜏)𝑑𝑡 + ∫ 𝑛(𝜏)ℎ(𝑡 − 𝜏)𝑑𝑡 0. 0. Al muestrear en t=T: 𝑇. 𝑡. 𝑦(𝑇) = ∫ 𝑠(𝜏)ℎ(𝑇 − 𝜏)𝑑𝑡 + ∫ 𝑛(𝜏)ℎ(𝑇 − 𝜏)𝑑𝑡 = 𝑦𝑠 (𝑇) + 𝑦𝑛 (𝑇) 0. 0. En donde 𝑦𝑠 (𝑇) es la componente de la señal 𝑦𝑛 (𝑇) la componente de ruido. El objetivo es seleccionar la respuesta al impulso del filtro que maximice la relación señal a ruido, que se define como:. 𝑆𝑁𝑅0 =. 𝑦𝑠2 (𝑡) 𝐸[𝑦𝑛2 (𝑡)]. (2.3.2.7). 𝐸[𝑦𝑛2 (𝑡)] es la varianza del ruido a la salida del filtro. Al evaluar en T se tiene: 𝑇. 𝑇. 𝐸[𝑦𝑛2 (𝑇)] = ∫ ∫ 𝐸[𝑛(𝜏)𝑛(𝑡)]ℎ(𝑇 − 𝜏)ℎ(𝑇 − 𝑡)𝑑𝑡𝑑𝜏 0. 0. 𝑇 1 = 𝑁0 ∫ ℎ2 (𝑇 − 𝑡)𝑑𝑡 2 0. Si se sustituye la evaluación de 𝑦𝑠2 (𝑇) y 𝐸[𝑦𝑛2 (𝑇)] en 𝑆𝑁𝑅0 se tiene:. 𝑡. 2. [∫ ℎ(𝜏)𝑠(𝑇 − 𝑡 − 𝜏)𝑑𝜏] 𝑆𝑁𝑅0 = 0 𝑇 2 1 𝑁 ℎ (𝑇 − 𝑡)𝑑𝑡 2 0 ∫0. La máxima salida de nivel señal a ruido obtenida por el filtro acoplado es:. 𝑆𝑁𝑅0 =. 2 𝑇 2 ∫ 𝑠 (𝑡)𝑑𝑡 = 2𝜀/𝑁0 𝑁0 0. La salida de nivel de señal a ruido del filtro adaptado de pende de la energía de la señal s(t).. - 43 - | Página.
(44) Instituto Politécnico Nacional. ESIME. 2.3.3 Detector óptimo La función del detector óptimo es determinar la señal transmitida en cada intervalo de ésta. Se basa en la observación del vector r en cada intervalo en que la probabilidad de una decisión correcta es máxima. Con esto se considera una regla de decisión basada en el proceso de la probabilidad a posteriori definida como: P(señal sm fue transmitida | r), m=1,2,…,M. El criterio de decisión responde a la selección de la señal correspondiente para el máximo del grupo de probabilidades a posteriori P(sm|r). Este criterio maximiza la probabilidad de una correcta decisión y minimiza la probabilidad de error, llamado probabilidad a posteriori máxima (MAP). Usando la regla de Bayes: [5]. 𝑃(𝑆𝑚 |𝑟) =. 𝑝(𝑟|𝑠𝑚 )𝑃(𝑠𝑚 ) 𝑝(𝑟). (2.3.3.1). Donde: 𝑀. 𝑝(𝑟) = ∑ 𝑝(𝑟|𝑠𝑚 )𝑃(𝑠𝑚 ) 𝑚=1. Se puede tener una simplificación el criterio MAP cuando las M señales son equiprobables a priori 𝑃(𝑠𝑚 ) = 1⁄𝑀 para todas las M. para todas las M. p(r) es independiente de la señal que esté siendo transmitida, por lo que la regla de decisión basada en encontrar que señal maximiza 𝑃(𝑆𝑚 |𝑟) es equivalente a encontrar la señal que maximice 𝑝(𝑟|𝑠𝑚 ). La decisión basada en esta maximización se llama “máxima-probabilidad” (ML). En el caso de un canal de AWGN, la función de probabilidad 𝑝(𝑟|𝑠𝑚 ) esta dada por: 𝑁. 1 1 ln 𝑝(𝑟|𝑠𝑚 ) = − 𝑁 ln 𝜋𝑁0 − ∑(𝑟𝑘 − 𝑠𝑚𝑘 )2 2 𝑁0 𝑘=1. El máximo de ln 𝑝(𝑟|𝑠𝑚 ) sobre 𝑠𝑚 es equivalente a encontrar la señal 𝑠𝑚 que minimize la distancia euclidiana.. - 44 - | Página.
(45) ESIME. Instituto Politécnico Nacional. 𝑁 2 𝐷(𝑟, 𝑠𝑚 ) = ∑(𝑟𝑘 − 𝑠𝑚𝑘 ) 𝑘=1. Donde 𝐷 (𝑟, 𝑠𝑚 ), m=0,1,…, M son las distancias métricas por lo que la regla de decisión basada en el criterio ML reduce a encontrar la señal sm más cercana en distancia a la señal recibida vector r. Esta regla de decisión se llama detección de mínima distancia.. Todo esto puede ser generado por un demodulador que correlacione, en forma cruzada, la señal recibida r(t) con cada una de las M posibles señales enviadas y ajusta cada salida del correlador en el caso de señales de energía desiguales. Equivalentemente, la señal recibida puede pasar a través de un banco de M filtros acoplados a las posibles señales {𝑠𝑚 (𝑡)} y muestrearse en t=T, que es el fin del intervalo del símbolo.. Finalmente, el receptor óptimo de AWGN, dividido en demodulador y detector, puede representarse como se presenta en la figura 2.3.4. 1 𝜀 2 1. 𝑓1 (𝑡) 𝑇. ×. ∫ 𝑓1 (𝑡)𝑑𝑡. +. 0. 1 𝜀 2 2. 𝑓2 (𝑡) 𝑇. ×. +. ∫ 𝑓2 (𝑡)𝑑𝑡 0. 𝑓𝑛 (𝑡). Salida de decisión. 1 𝜀 2 𝑛. 𝑇. ×. Selección de la más grande. …. …. …. Señal recibida 𝑟(𝑡). +. ∫ 𝑓𝑛 (𝑡)𝑑𝑡 0. Muestreo a 𝑡 = 𝑇 Figura 2.3.4. Circuito equivalente del receptor de AWGN.. 2.4 Probabilidad de error A continuación, en términos generales, se expondrá el desarrollo que tiene como resultado la expresión que sirve para evaluar la probabilidad de error de bit en sistemas binarios, tambien conocida como tasa de bit erróneo (BER por sus siglas en inglés). Con este desarrollo es posible demostrar, de manera. - 45 - | Página.
(46) Instituto Politécnico Nacional. ESIME. particular, las tasas de bit erróneo para cada una de las modulaciones que se plantean en el capítulo 3 de este trabajo.. Suponiendo que T es el tiempo usado para transmitir un bit de datos, la señal binaria puede definirse como sigue:. 𝑆 (𝑡), 0 < 𝑡 ≤ 𝑇 𝑝𝑎𝑟𝑎 𝑢𝑛 1. 𝑆(𝑡) = { 1 𝑆2 (𝑡), 0 < 𝑡 ≤ 𝑇 𝑝𝑎𝑟𝑎 𝑢𝑛 0.. (2.4.1). Si la señal binaria es afectada por ruido blanco aditivo gaussiano en la entrada del receptor o antes de ella, se tiene como resultado una forma de onda analógica denotada por:. 𝑟 (𝑡), 0 < 𝑡 ≤ 𝑇 𝑝𝑎𝑟𝑎 𝑢𝑛 1 𝑒𝑛𝑣𝑖𝑎𝑑𝑜. 𝑟𝑜(𝑡) = { 01 𝑟02 (𝑡), 0 < 𝑡 ≤ 𝑇 𝑝𝑎𝑟𝑎 𝑢𝑛 0 𝑒𝑛𝑣𝑖𝑎𝑑𝑜.. (2.4.2). Como la señal ha sido afectada por AWGN, ahora es una variable aleatoria con una distribución continua y es posible reducir la nomenclatura para la señal como:. 𝑟0 = 𝑟0 (𝑡0 ) = {. 𝑟01 (𝑡), 0 < 𝑡 ≤ 𝑇 𝑝𝑎𝑟𝑎 𝑢𝑛 1 𝑒𝑛𝑣𝑖𝑎𝑑𝑜. 𝑟02 (𝑡), 0 < 𝑡 ≤ 𝑇 𝑝𝑎𝑟𝑎 𝑢𝑛 0 𝑒𝑛𝑣𝑖𝑎𝑑𝑜.. Donde 𝑟0 es conocido como prueba estadistica.. 𝑓(𝑟0 |𝑆1 𝑒𝑛𝑣𝑖𝑎𝑑𝑎). 𝑓(𝑟0 |𝑆2 𝑒𝑛𝑣𝑖𝑎𝑑𝑎). 𝑝(𝑒𝑟𝑟𝑜𝑟|𝑆1 𝑒𝑛𝑣𝑖𝑎𝑑𝑎). 𝑝(𝑒𝑟𝑟𝑜𝑟|𝑆2 𝑒𝑛𝑣𝑖𝑎𝑑𝑎). 𝑈𝑚𝑏𝑟𝑎𝑙 = 0 Figura 2.4.1. Probabilidad de error para señalización binaria.. - 46 - | Página. (2.4.3).
(47) Instituto Politécnico Nacional. ESIME. Hasta aquí se supondrá que las funciones de densidad de probabilidad se pueden evaluar para las dos variables aleatorias 𝑟0 . Las funciones de densidad de probabilidad para 𝑟0 son condicionales puesto que dependen de que la transmisión sea un 0 o un 1 binario, o bien como sigue:. 𝑟0 = 𝑟01 𝑠𝑖𝑒𝑛𝑑𝑜 𝑙𝑎 𝑃𝐷𝐹 𝑓(𝑟0 |𝑆2 𝑒𝑛𝑣𝑖𝑎𝑑𝑎) 𝑟0 = 𝑟02 𝑠𝑖𝑒𝑛𝑑𝑜 𝑙𝑎 𝑃𝐷𝐹 𝑓(𝑟0 |𝑆1 𝑒𝑛𝑣𝑖𝑎𝑑𝑎). (2.4.4). Donde PDF es la funcion de densidad de probabilidad por sus siglas en ingles.. Para hacer una expresión general para la BER en sistemas binarios, se supondrá que en la entrada del receptor tendremos una señal 𝑟0 > 𝑉𝑇 en tanto se envíe un 1 y 𝑟0 < 𝑉𝑇 siempre que se envíe un 0, 𝑉𝑇 es el valor del voltaje de umbral en el comparador usado para decidir qué tipo de símbolo binario fue recibido. Es importante notar que siempre que la señal (a la entrada del receptor) esté afectada, alterada o modificada por ruido pueden ocurrir dos tipos de errores:. 𝑟0 > 𝑉𝑇 𝑠𝑖 𝑠𝑒 𝑒𝑛𝑣í𝑎 𝑢𝑛 0 𝑟0 < 𝑉𝑇 𝑠𝑖 𝑠𝑒 𝑒𝑛𝑣í𝑎 𝑢𝑛 1. (2.4.5). O bien: 𝑉𝑇. 𝑃(𝑒𝑟𝑟𝑜𝑟 |𝑆1 𝑒𝑛𝑣𝑖𝑎𝑑𝑎) = ∫ 𝑓(𝑟0 |𝑆1 )𝑑𝑟0 −∞ ∞. 𝑃(𝑒𝑟𝑟𝑜𝑟 |𝑆2 𝑒𝑛𝑣𝑖𝑎𝑑𝑎) = ∫ 𝑓(𝑟0 |𝑆2 )𝑑𝑟0 𝑉𝑇. Entonces, la Tasa de Bit Erróneo se define como:. 𝑃𝑒 = 𝑃(𝑒𝑟𝑟𝑜𝑟 |𝑆1 𝑒𝑛𝑣𝑖𝑎𝑑𝑎)𝑃(𝑆1 𝑒𝑛𝑣𝑖𝑎𝑑𝑎) + 𝑃(𝑒𝑟𝑟𝑜𝑟 |𝑆2 𝑒𝑛𝑣𝑖𝑎𝑑𝑎)𝑃(𝑆2 𝑒𝑛𝑣𝑖𝑎𝑑𝑎). (2.4.7). Expresión que resulta del teorema de probabilidad total.. Sustituyendo las expresiones 2.4.6 y 2.4.7 en la expresión 2.4.8 se tiene una ecuación general que define la BER para sistemas binarios de comunicaciones, el cual se define como: 𝑉𝑇. ∞. −∞. 𝑉𝑇. 𝑃𝑒 = 𝑃(𝑆1 𝑒𝑛𝑣𝑖𝑎𝑑𝑎) ∫ 𝑓(𝑟0 |𝑆1 )𝑑𝑟0 + 𝑃(𝑆2 𝑒𝑛𝑣𝑖𝑎𝑑𝑎) ∫ 𝑓(𝑟0 |𝑆2 )𝑑𝑟0. - 47 - | Página.
(48) Instituto Politécnico Nacional. ESIME. Para la convenencia del análisis, generalmente se asume que la probabilidad de símbolo enviado es equiprobable, es decir:. 𝑃(𝑆1 𝑒𝑛𝑣𝑖𝑎𝑑𝑎) =. 1. 𝑃(𝑆2 𝑒𝑛𝑣𝑖𝑎𝑑𝑎) =. 1 2. 2. (2.4.9). Cuando se tiene una señal afectada por AWGN, las dos Funciones de Densidad de Probabilidad Condicionales, pueden definirse como variables aleatorias gaussianas dependiendo del símbolo envíado tal y como sigue:. 𝑓(𝑟0 |𝑆1 ) =. 𝑓(𝑟0 |𝑆2 ) =. 1 √2𝜋 𝜎0 1 √2𝜋 𝜎0. −(𝑟0 −𝑆01 )2 2 𝑒 2𝜎0. −(𝑟0 −𝑆02 )2 2 𝑒 2𝜎0. 𝜎02 es la potencia promedio del ruido a la salida del circuito receptor, el proceso del ruido en este punto es estacionario.. Considerando, como se menciona anteriormente, una fuente equiprobable y sustituyendo las ecuaciones 2.4.10 y 2.4.11 en la expresión 2.4.9, la definición matemática general para la BER se define como: 2. 2. −(𝑟0 −𝑆01 ) −(𝑟0 −𝑆02 ) 1 𝑉𝑇 1 1 ∞ 1 2 2 𝑃𝑒 = ∫ 𝑒 2𝜎0 𝑑𝑟0 + ∫ 𝑒 2𝜎0 𝑑𝑟0 2 −∞ √2𝜋 𝜎0 2 𝑉𝑇 √2𝜋 𝜎0. Esta expresión puede reducirse, por comodidad, a la función 𝑄(𝑧) que ya ha sido tabulada con la finalidad de tener aproximaciones de la evaluciación de ésta, la reducción se hace mediante un cambio de variable en el cual:. - 48 - | Página. ʎ=. −(𝑟0 −𝑆01 ) 𝜎0. (2.4.13). ʎ=. −(𝑟0 −𝑆02 ) 𝜎0. (2.4.14).
(49) ESIME. Instituto Politécnico Nacional. Para la primera y segunda integral respectivamente, haciendo el cambio de variable y sustituyendo 2.4.13 y 2.4.14 en 2.4.12, la probabilidad de error se reduce a:. 1 ∞ 1 −ʎ2 1 ∞ 1 −ʎ2 𝑃𝑒 = ∫ 𝑒 2 𝑑ʎ + ∫ 𝑒 2 𝑑ʎ 2 −(𝑉𝑇 −𝑆01)/𝜎0 √2𝜋 2 −(𝑉𝑇 −𝑆02)/𝜎0 √2𝜋 O bien en su forma compacta: 1 2. −𝑉𝑇 +𝑆01 1 −𝑉 +𝑆 )+ 𝑄 ( 𝑇 02) 𝜎0 2 𝜎0. 𝑃𝑒 = 𝑄 (. (2.4.16). Si al umbral de comparación 𝑉𝑇 se le asigna un valor apropiado, la probabilidad de error se minimiza, esto se logra aplicando la regla de Leibniz a la ecuación 2.4.12, entonces ésta queda como sigue: 2. 2. −(𝑟0 −𝑆01 ) −(𝑟0 −𝑆02 ) 𝑑𝑃𝑒 1 1 1 1 2 2 2𝜎 0 = 𝑒 − 𝑒 2𝜎0 =0 𝑑𝑉𝑇 2 √2𝜋 𝜎0 2 √2𝜋 𝜎0. Expresión que puede reducirse a:. 𝑒. −(𝑟0 −𝑆01)2 2𝜎2 0. =𝑒. −(𝑟0−𝑆02)2 2𝜎2 0. (2.4.18). Lo cual, aplicando logaritmo natural en ambos lados de la ecuación 2.4.18 es igual a:. (𝑉𝑇 − 𝑆01 )2 = (𝑉𝑇 − 𝑆02 )2. (2.4.19). Y para una mínima probabilidad de error el valor del umbral en el comparador puede definirse como en la ecuación 2.4.20, siempre que los símbolos sean equiprobables:. 𝑉𝑇 =. 𝑆01 +𝑆02 2. (2.4.20). Entonces para un sistema binario en presencia de ruido blanco aditivo gaussiano, con un valor de umbral óptimo, la BER se define como:. - 49 - | Página.
(50) ESIME. Instituto Politécnico Nacional. 𝑃𝑒 = 𝑄 (. 𝑆01 −𝑆02 ) 2𝜎0. = 𝑄 (√. (𝑆01 −𝑆02 )2 4𝜎02. ). (2.4.21). Para la recepción por medio de un filtro acoplado, la BER puede reducirse al maximizar el argumento de Q por medio de la desigualdad de Schwartz, por lo tanto se requiere encontrar el filtro lineal que maximiza a: [𝑆01 (𝑡0 )−𝑆02 (𝑡0 )]2 𝜎02. =. [𝑆𝑑 (𝑡0 )]2 𝜎02. (2.4.22). Para el caso de un filtro acoplado, como ruido blanco a la entrada, éste deberá acoplarse a la señal de diferencia 𝑆𝑑 = 𝐶 [𝑆1 (𝑡0 − 𝑡) − 𝑆2 (𝑡0 − 𝑡)] por lo tanto la respuesta al impulso unitario para una señalización binaria es:. ℎ(𝑡) = 𝑆𝑑 = 𝐶[𝑆1 (𝑡0 − 𝑡) − 𝑆2 (𝑡0 − 𝑡)]. (2.4.23). 𝑆1 (𝑡) es la señal que aparece en la entrada del receptor cuando se envía un 1 binario y en consecuencia 𝑆2 (𝑡) es la señal recibida cuando se envía un 0 binario. La razón de señal pico de salida a ruido promedio que se obtiene en el filtro acoplado es: [𝑆𝑑 (𝑡0 )]2 𝜎02. =. 2𝐸𝑑 𝑁0. (2.5.24). Donde 𝑁0 es la densidad de potencia del ruido a la entrada del receptor y 𝐸𝑏 la energía de la señal de diferencia a la entrada del receptor, definida como: 𝑇. 𝐸𝑏 = ∫ [𝑆1 (𝑡) − 𝑆2 (𝑡)]2 𝑑𝑡 0. 2.4.1 Probabilidad de error para sistemas en banda base Señalización unipolar. La señalización polar define una señal de la siguiente manera:. - 50 - | Página.
(51) ESIME. Instituto Politécnico Nacional. 𝑆 (𝑡 ) = {. 𝑆1 (𝑡) = +𝐴 𝑆2 (𝑡) = 0. 0 < 𝑡 ≤ 𝑇 𝑝𝑎𝑟𝑎 1 0 < 𝑡 ≤ 𝑇 𝑝𝑎𝑟𝑎 0. (2.4.1.1). Partiendo de la siguiente expresión, para una señalización binaria afectada, por AWGN recibida por un filtro acoplado y con un valor óptimo para el umbral de decisión: 𝐸 𝑁0. 𝑃𝑒 = 𝑄 (√ 𝑏 ). (2.4.1.2). Donde: 𝑇. 𝐸𝑏 = ∫0 [𝑆1 (𝑡) − 𝑆2 (𝑡)]2 𝑑𝑡 Se puede demostrar mediante la expresión 2.4.1.3 que la energía 𝐸𝑑 = 𝐴2 𝑇, por lo tanto la BER se define como: 𝐴2 𝑇 ) 2𝑁0. 𝑃𝑒 = 𝑄 (√. (2.4.1.4). Señalización polar. La forma de onde para la señalización polar matemáticamente se define como:. 𝑆 (𝑡 ) = {. 𝑆1 (𝑡) = +𝐴 0 < 𝑡 ≤ 𝑇 𝑝𝑎𝑟𝑎 1 𝑆2 (𝑡) = −𝐴 0 < 𝑡 ≤ 𝑇 𝑝𝑎𝑟𝑎 0. Nótese que para ésta señalización 𝑆1 (𝑡) = −𝑆2 (𝑡). Para un filtro acoplado, partiendo de la ecuación 2.4.1.2, y definiendo la energía de la señal de diferencia por medio de la ecuación 2.4.25 como:. 𝐸𝑑 = (2𝐴)2 𝑇. (2.4.1.6). Entonces la BER definida para un filtro acoplado usando una señalización polar se define como:. 2𝐸𝑏 ) 𝑁0. (2.4.1.7). 𝐴2 𝑇 ) 𝑁0. (2.4.1.8). 𝑃𝑒 = 𝑄 (√ y en términos de la amplitud y la duración del símbolo:. 𝑃𝑒 = 𝑄 (√. - 51 - | Página.
(52) Instituto Politécnico Nacional. ESIME. CAPÍTULO 3 | “Técnicas de modulación digital” - 52 - | Página.
(53) ESIME. Instituto Politécnico Nacional. Introducción La teoría presente aborda planteamientos para definir la forma de onda resultante de la modulación de señales digitales (ASK, FSK, PSK y APK), el rendimiento de la técnica en sistemas afectados por ruido y la definición de la densidad espectral de potencia de cada una de ellas, porque brinda un panorama de la ocupación del ancho de banda que puede ocupar cada una de las modulaciones que aquí se plantean. Para definir la PSD de cada técnica de modulación es posible desglosar el siguiente desarrollo práctico partiendo de una señal pasabanda modulada que puede definirse mediante:. 𝑠(𝑡) = 𝑅𝑒{𝑔(𝑡)𝑒 𝑗𝜔𝑐 𝑡 }. (3.1). Donde 𝜔𝑐 = 2𝜋𝑓𝑐 y 𝑓𝑐 es la frecuencia de la portadora y g(t) el tipo de señal modulada. Se define entonces el espectro de voltaje (o corriente) de la señal pasabanda como: 1. 𝑆(𝑓) = [𝐺(𝑓 − 𝑓𝑐 ) + 𝐺 ∗ (−𝑓 − 𝑓𝑐 )] 2. (3.2). Y la densidad espectral de potencia es: 1 4. 𝑃𝑠 (𝑓) = [𝑃𝑔 (𝑓 − 𝑓𝑐 ) + 𝑃𝑔 (−𝑓 − 𝑓𝑐 )]. (3.3). Donde: 𝐺 (𝑓) = F[𝑔(𝑡)] y 𝑃𝑠 es la densidad espectral de potencia.. 3.1 Técnica de modulación ASK coherente La modulación por medio de la técnica ASK comunmente conocida también como OOK (On-Off-Keying), no es más que una conmutación de amplitudes de una señal del tipo cosenoidal que varían respecto al estado del pulso por medio del cual viaja la información. La señal ASK modulada resultante consta de pulsos de RF llamados marcas, los cuales representan al 1 binario y espacios que representan al 0 binario. (Ver figura 3.1.1). - 53 - | Página.
Figure


+7




Documento similar
Los objetivos del pilotaje son más precisamente: las mujeres y los hombres como los actores del proceso, los proyectos como sistemas temporales para los cuales se crearon, la
En nuestra opinión, las cuentas anuales de la Entidad Pública Empresarial Red.es correspondientes al ejercicio 2010 representan en todos los aspectos significativos la imagen fiel
En nuestra opinión, las cuentas anuales de la Entidad Pública Empresarial Red.es correspondientes al ejercicio 2012 representan en todos los aspectos
La Intervención General de la Administración del Estado, a través de la Oficina Nacional de Auditoría, en uso de las competencias que le atribuye el artículo 168
La Intervención General de la Administración del Estado, a través de la Oficina Nacional de Auditoría, en uso de las competencias que le atribuye el artículo
La invalidez en el MMPI por no respuestas no se considera criterio positivo (sólo se puede considerar tal posibilidad en caso de daño neurológico que justifique tal estilo
Y EN EL MOMENTO EN PERO POR MÁS QUE SE ESFORZADA EL HOMBRE ARAÑA EN RECORDAR. ADÓNDE HABÍA VISTO ANTES A ESOS:CRIMINALES,NO
1) Muestreo. El muestreo es la primera etapa del convertidor analógico-digital. A partir de la señal analógica continua de entrada, obtiene una señal analógica discreta en el tiempo.
