Sintonización de controladores PID
• Ajustar y calibrar un controlador tipo PID a partir del método de Ziegler-Nichols y Chien, Hrones y Reswick
• Crear un sistema de regulación con un control PID Digital.
• 1 FUENTE DE ALIMENTACIÓN 15 VCD [SO3538-8D]
• 1 REFERENCIA DE VOLTAJE [SO3536-5A] • 1 CONTROL PID [SO3536-6B]
• 1 AMPLIFICADOR DE POTENCIA [SO3536-7Q]
• 1 SISTEMA CONTROLADO DE TEMPERATURA [SO3536-8T]
• 1 MÓDULO CON BOMBA [SO3536-9H]
• 1 SISTEMA DE CONTROL DE NIVEL [SO3536-9K]
• 1 GRAFICADOR X-Y Y-t (PLOTTER) • 20 PUENTES
• 1 SWITCH
•
7 CABLES7• 2 HOJAS DE PAPEL MILIMETRADO (El estudiante debe traerlas)
• 1 COMPUTADORA CON EL SOFTWARE PID CONTROLLER PARA PC/I V3.0 DE LUCAS NÜLLE
• 1 INTERFAZ DE PC [LM8912]
• 1 CABLE SERIAL DE 9 PINES PLANO
Calibración de Controladores.
El proceso de seleccionar los parámetros del controlador para que el sistema cumpla con las especificaciones de diseño se conoce como calibración o ajuste del controlador. Las reglas de Ziegler-Nichols sugieren un método para afinar controladores PID basándose en la respuesta experimental ante una señal escalón de entrada. La regla de Ziegler-Nichols es muy conveniente cuando no se conocen los modelos matemáticos de las plantas.
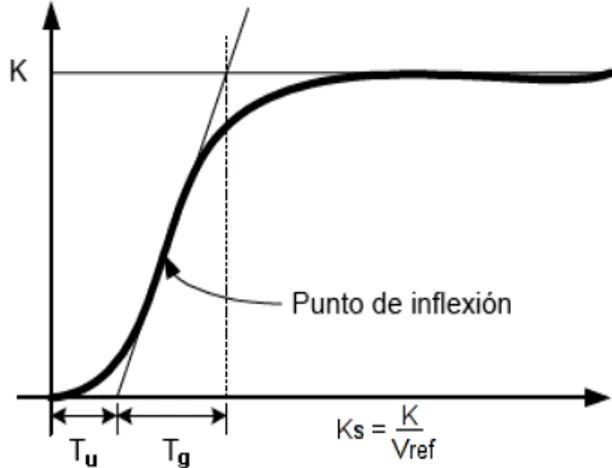
La respuesta de salida de sistemas de orden superior, por lo general, ante un escalón y en lazo abierto es Facultad: Ingeniería.
Escuela: Electrónica.
Asignatura: Sistemas de Control Automático.
Lugar de ejecución: Instrumentación y Control (Edificio 3, 2da planta).
Objetivos específicos
Materiales y equipo
una curva en forma de S que puede caracterizarse por dos parámetros: el tiempo muerto TU y la
constante de tiempo Tg. El tiempo muerto o de atraso y la constante de tiempo se determinan trazando
una línea tangente a la curva en forma de S en el punto de inflexión y se encuentran las intersecciones de esta línea tangente con el eje del tiempo y con la línea c(t) = K .
Ziegler-Nichols sugiere fijar los valores de Kp , TN y TV de acuerdo a la siguiente tabla:
Tipo de
controlador KP TN TV
P Tg/(TuKS) ∞0 0
PI (0.9Tg)/(TuKS) Tu/0.3 0
PID (1.2Tg)/(TuKS) 2Tu 0.5Tu
Tabla 6.1. Método de calibración de controladores de Ziegler-Nichols.
El método de Chien, Hrones y Reswick es una variante del método Ziegler-Nichols, donde se proponen ajustes diferentes de los parámetros del controlador, dependiendo si se desea obtener una respuesta más rápida con un 20% de sobreoscilación o sin sobresocilación. Además, se recomiendan distintos valores de los parámetros del controlador de acuerdo a la optimización de su comportamiento ante cambios de la variable de referencia “set point” o ante perturbaciones. En función del tipo de controlador elegido, para el ajuste de los parámetros propone la Tabla 6.2.
Tabla 6.2. Método de calibración de controladores de Chien, Hrones y Reswick, en la cual a=KTg/Tu.
El Control PID utilizado en el laboratorio es el SO3536-6B que está representado en la Fígura 6.1 y posee las siguientes conexiones y controles
1. Voltaje de operación, +15V 2. Voltaje de operación, 0V 3. Voltaje de operación, -15V 4. Conexión de paso
5. Entrada de Setpoint, ±10V 6. Entrada de Setpoint, ±10V 7. Entrada de valor actual, ±10V
8. Salida del controlador 9. Interruptor de la sección D 10. Interruptor de la sección I
11. Controles de escala y ajuste fino de Kp 12. Controles de escala y ajuste fino de TV 13. Controles de escala y ajuste fino de TN 14. Indicador de saturación
Perturbación Perturbación P a rá m e tr
o 0.6/a 0.95/a 0.95/a 1.2/a
Ti 1Tg 2.4Tg 1.4Tg 2Tg
0.5Tu 0.42Tu 0.47Tu 0.42Tu
Figura 6.1 Control PID del laboratorio.
Los métodos de optimización de un controlador en un sistema de control de lazo cerrado deben ser lo más directos que sea posible. Las recomendaciones de Ziegler-Nichols o Chiens, Hrones y Reswick son, por ejemplo, muy simples y por eso ampliamente usadas. Sin embargo, estas recomendaciones asumen una combinación especial de las secciones P, I y D del elemento de control: Esta combinación es así llamada “Controlador Técnico” Cuyo diagrama se muestra a continuación.
Figura 6.2. Controlador técnico Los parámetros de ajuste para el controlador técnico son:
KP = Coeficiente proporcional
TV = Duración de pre-mantenimiento
TN = Tiempo de acción integral
En la siguiente figura se presenta la configuración del controlador matemático.
Figura 6.3. Controlador matemático Los parámetros de ajuste para el controlador matemático son:
KP = Coeficiente proporcional
KD = Coeficiente diferencial
KI = Coeficiente integral
La relación entre TV y KP, o TN y KI, es:
P D V
K
K
T
=
Ecuación 1 yI P N
K
K
T
=
Ecuación 2La función de transferencia para el controlador que se encuentra en el laboratorio es la misma que para un controlador PID general, la cual es:
Ecuación 3 La cual puede ser reescrita para un controlador matemático de la siguiente manera:
s
K
s
K
K
s
E
s
U
D IP
+
+
⋅
=
)
(
)
(
Ecuación 4 PID DigitalEl programa “PID-Controller for the PC/I”, en combinación con la interfaz LN-PC (LM8912, llamada en lo sucesivo PC/I), representa un regulador de tipo universal, soporta los componentes P, I y D como también todas las posibles combinaciones de ellos. La tarea de la regulación la lleva acabo la PC/I (y no la PC), de modo que la respuesta del regulador no depende de la velocidad de la PC. La última tiene la tarea de ajustar los parámetros del controlador junto con la presentación gráfica de diferentes variables del regulador.
Se pueden analizar los siguientes puntos:
• Montaje elemental de un circuito cerrado de regulación en diagrama de bloques con especificación de las señales conforme a la norma.
• Respuesta del regulador en función de la posición del valor de referencia. • Efectos de los parámetros del regulador sobre la respuesta del regulador. • Efectos de la zona muerta, en la respuesta de la acción de control. • Limitaciones para el uso de tipos de regulador individuales.
• Determinación gráfica de los valores característicos de una planta de regulación. • Establecimiento de los parámetros óptimos del regulador.
• Evaluación de la calidad del sistema de control.
El programa también puede funcionar sin el PC/I. En este caso, el programa simula plantas elementales, de modo que se puede trabajar con el programa aún sin disponer de un montaje experimental concreto.
Nota: Lea la guía de laboratorio antes de realizar los procedimientos. Esto le ayudará a clarificar el objetivo perseguido, así como le ahorrará tiempo al ejecutar la práctica, Un grupo de alumnos iniciará con la parte I y otro grupo con la parte II, luego se intercambiarán.
PARTE I CALIBRACIÓN DE UN CONTROLADOR PID CON EL MÉTODO DE ZIEGLER NICHOLS DE LAZO ABIERTO.
1. Si tiene asignado como planta el sistema térmico siga con el paso 9, si es el sistema hidráulico continúe con el paso 2.
2. Arme el sistema hidráulico a lazo abierto de la Figura 6.4. Coloque todos los controles en cero, deshabilite los controles I y D del módulo PID (colocando los interruptores AB(D) y AB(I) hacia arriba) y abra el switch 1.
3. Coloque la perilla de la válvula de entrada del tanque abierta por arriba. (Punto verde arriba y rojo abajo) y la de la válvula de salida abierta en el mínimo. (Girar la perilla en el sentido de las agujas del reloj y deje al frente el primer punto verde que sigue al rojo). y haga los siguientes ajustes:
W = 50% KP = 2
TN = deshabilitado (al mínimo)
TV = deshabilitado (al mínimo)
4. Introduzca en el tanque la división que se muestra en la Figura 6.5 para convertirlo en una planta de orden superior, la parte de los orificios más pequeños debe quedar en la parte inferior del tanque.
Figura 6.5. Vista de planta de la división de orden superior. 5. Calibre el cero del transductor de presión/voltaje y trace la gráfica de 0 Pa.
6. Coloque el selector de la escala del tiempo del plotter a 10 s/cm y trace la gráfica de respuesta del sistema, (no olvide dejar que la pluma recorra uno o dos centímetros antes de cerrar el SWITCH # 1). deje que se estabilice el nivel del tanque
7. Abra el SWITCH #1 para que se vacíe el tanque. 8. Siga con el paso 14
9. Arme el sistema térmico a lazo abierto de la Figura 6.6. Coloque todos los controles en cero, deshabilite los controles I y D del módulo PID (colocando los interruptores AB(D) y AB(I) hacia arriba) y abra el switch 1.
10. Trace la gráfica de referencia de 0 grados, luego encienda la fuente y trace la gráfica de temperatura ambiente.
11. Realice los siguientes ajustes: W = 100%.
KP = 1
TN = deshabilitado (al mínimo).
TV = deshabilitado (al mínimo).
12. Coloque el selector de la escala del tiempo del plotter a 10 s/cm y trace la gráfica de respuesta del sistema, (no olvide dejar que la pluma recorra uno o dos centímetros antes de cerrar el SWITCH #1). Deje que se estabilice la temperatura.
13. Abra el SWITCH #1 y deje que el sistema vuelva a la temperatura ambiente.
14. En la gráfica obtenida, indique el punto de inflexión en la respuesta transitoria y trace una recta tangente a ese punto, a continuación mida el tiempo muerto, la constante de tiempo y la ganancia del sistema como se indica en la siguiente Figura 6.7
Figura 6.7. Determinación de TU ,Tg y KS de la respuesta de la planta a lazo abierto.
15.Calcule la ganancia proporcional y los tiempos de acción integral y de duración predicha para el controlador PID como se muestra en la Tabla 6.1 de la introducción teórica.
KP = _____________, TV = _____________ y TN = ____________,
16.Cierre el lazo de control y calibre el controlador PID con estos valores, (no olvide activar los interruptores AB(I) y AB(D) del controlador PID) y trace la gráfica de respuesta del sistema, (no olvide dejar que la pluma recorra uno o dos centímetros antes de cerrar el SWITCH # 1). deje que se estabilice el sistema ¿Según la gráfica obtenida que concluye acerca de la calibración del controlador PID que realizó?_____________________________________________
PARTE II AJUSTE DE PARÁMETROS CON PID DIGITAL
18.Para implementar el sistema con un PID digital deberá conectar la salida analógica “B” de la PC/I con la entrada de la planta (en nuestro caso desde la entrada del amplificador de potencia) y la entrada analógica “B” de la PC/I con la salida de la planta (en este caso la salida del transductor ) (usamos la entrada “B” de la PC/I, ya que posee una resolución mayor que la entrada “A”). Dependiendo de la planta que tenga asignada implemente el sistema de la Figura 6.8 o 6.9.
19. Ejecute el programa del regulador PID (PID-Controller). Inicialmente se muestra una ventana con el mensaje que el programa del Regulador se está transfiriendo a la PC/I, seguido por el diagrama de bloques del sistema de regulación.
20. Ahora defina los parámetros del Regulador. Elija primero en el menú Settings la opción Controller Parameter y luego seleccione Controller (Ver Figura 6.10)
Figura 6.9 Sistema térmico con PID digital con interfaz PC/I
Figura 6.10 Ajuste de los parámetros para el PID
21. Active las opciones P e I de modo que el Regulador funcione como un controlador PI. Coloque para la ganancia KP el valor de 6 y para el tiempo de acción integral el valor de 5000. Estos son valores estimados para los parámetros del regulador; luego veremos como optimizar la calibración del regulador.
Figura 6.11 Selección del valor de referencia
23. En la pestaña Options puede habilitar la casilla de Controller runs continuous para que el regulador no se detenga al final del tiempo en la gráfica, aunque esto por ahora, no es necesario.
24. Se necesita la respuesta en el tiempo de la planta para su observación: del menú View, seleccione la opción Timing Chart.
25. Finalmente, las divisiones de los ejes del sistema de coordenadas serán cambiadas, Seleccione del menú Chart la opción x-Axis Scale y en las cajas de texto, coloque el máximo del eje del tiempo en 60 y la división a 10 y Pulse sobre el botón OK
Figura 6.12 Ajuste de la escala X
26. Debe definir ahora lo que se presentará en el diagrama de tiempo: En el menú View, active la opción Display Signals
27. Seleccione, en el controller 1, la opción Control Input, y en View Title+Arrows, no cierre la ventana, y ahora seleccione Controled variable y en View Title+Value, finalmente seleccione Controller output y en en View Title+Value. Luego pulse el botón Close.
28. Puede cambiar el color y la forma de los trazos escogiendo Signals del menú Chart.
29. Con ello ha realizado todos los ajustes necesarios y puede iniciar la regulación: Para ello activamos la opción Start Controller del menú Settings; la respuesta de las variables individuales pueden observarse en la pantalla.
30. Sin ningún análisis exhaustivo, puede notar que los parámetros del regulador seleccionados no son los óptimos. Es posible tratar de de mejorar la calidad del control cambiando los valores de los parámetros del controlador. Sin embargo, un método más sofisticado para establecer la calibración óptima se demostrará aquí.
31. Del menú View seleccione la opción Line response. Aparece la siguiente ventana:
Figura 6.14 Respuesta de la planta.
32. Seleccione del menú Settings la opción Start Measurement, el registro de la respuesta de la planta aparecerá.
33. Para terminar la medición (en aproximadamente 160s) presione F5. La tangencia en el punto de inflexión, se aplica a la curva medida; los valores correspondientes se presentan a la izquierda de la ventana.
Figura 6.15 Trazo de la recta tangente al punto de inflexión.
35. Del menú Evaluation escoja la opción Chien, Hrones & Reswick En la ventana aparecen los valores calculados de las tangentes:
Figura 6.16 Valores obtenidos con el método de Chien, Hrones y Reswick.
36. Para transferir los valores calculados al regulador, se debe de pulsar el botón Accept.
37. Seleccione el menú View, y de allí la opción Timing Chart. Aquí puede ser necesario que le coloque el doble de tiempo al eje X y que habilite la casilla Controller runs continuous del menú Options en Settings.
38. Vuelva a iniciar la regulación (puede presionar F5).
39. Ahora cambie súbitamente la entrada de control para evaluar la respuesta de la planta, para ello ubique el puntero del ratón sobre una flecha en la caja w% de la barra de herramientas a la izquierda, pulse sobre la entrada de referencia y hará que cambie en pasos de 1%; si se mantiene presionada la tecla “ctrl” y se pulsa el botón de flecha, los cambios son en pasos de 10%
41. Salga de los programas, apague y desconecte el equipo.
1. ¿Sería necesario más ajuste al aplicar el método de Ziegler-Nichols a un sistema? ¿De qué dependen esos ajustes de ser necesarios.
2. ¿Cuál es la calidad del regulador (para un tiempo de 60 segundos) con los parámetros PI colocados como al inicio, con respecto a los calibrados con el método de Chien, Hrones y Reswick?
3. ¿Se podría realizar el método de calibración de Ziegler&Nichols a lazo cerrado con este regulador PID digital? Explique.
• Investigue sobre otros métodos de calibración PID.
• ¿Cuál es la función de transferencia que debe implementarse para realizar un regulador PID en un sistema microprocesado?
• INGENIERÍA DE CONTROL MODERNA. Tercera Edición. Prentice Hall.
Katsuhiko Ogata, Biblioteca UDB, Clasificación: Libro interno 629.8 O34 1998
• SISTEMAS DE CONTROL AUTOMÁTICO. Séptima Edición. Prentice Hall.
Benjamín Kuo, Biblioteca UDB, Clasificación: 621.3811 K95 1996
• REGULADOR PID. INSTRUCIONES DE OPERACIÓN. 2a. Edición. Lucas-Nülle. 1990.
Bibliografía
EVALUACION
% 1-4 5-7 8-10 Nota
CONOCIMIENTO 25 Conocimiento
deficiente de los siguientes fundamentos teóricos:
-Método de Calibración de Zieglers-Nichols -Método de Calibración de Chien, Hrones y Reswick
Conocimiento y explicación incompleta de los fundamentos teóricos.
Conocimiento completo y explicación clara de los fundamentos teóricos.
APLICACIÓN DEL
CONOCIMIENTO 70
Cumple con uno de los siguientes criterios: -Calibra correctamente un controlador PID con el método de Ziegler-Nichols.
-Obtiene los parámetros del controlador PID utilizando el programa para el PID Digital con el método de Chien, Hrones y Reswick. -Obtiene la respuesta del sistema con los parámetros obtenidos con el PID Digital.
Cumple con dos de los
criterios. Cumple con los tres criterios.
ACTITUD 2.5 Es un observador
pasivo. Participa ocasionalmente o lo hace constantemente pero sin coordinarse con su compañero.
Participa propositiva e integralmente en toda la práctica.
2.5 Es ordenado pero no hace un uso adecuado de los recursos.
Hace un uso adecuado de lo recursos, respeta las pautas de seguridad, pero es desordenado.
Hace un manejo responsable y adecuado de los recursos conforme a pautas de seguridad e higiene.
TOTAL
Guía 6: Sintonización de controladores PID
Alumno:
Hoja de cotejo:
6
Docente: GL: Fecha: