1 PORTADA
Po tifi ia U iversidad Javeria a Fa ultad de I ge iería
Ate izaje autó o o de u Quad oto so e u a platafo a e o i ie to
Maest ía e I ge ie ía ele t ó i a
Álvaro Gerardo Otero Cai edo I ge iero Ele tró i o PUJ
2
CONTEXTO
3
1.
INDICE GENERALPORTADA ... AGRADECIMIENTOS ... Error! Book ark ot defi ed. CONTEXTO ...
4
2.
INDICE DE FIGURASFig. 1.Descripción de los ángulos fundamentales del QuadrotorAscTecHummingbird
(Ascending Technologies, 2014) ... 10
Fig. 2.Sistema de coordenadas del quadrotor. (Bouabdallah, 2004) ... 11
Fig. 3. Diagrama de bloques interno de Ardupilot (3DRobotics, 2013) ... 15
Fig. 4.Diagrama de referencia del Modelo Pinhole ... 16
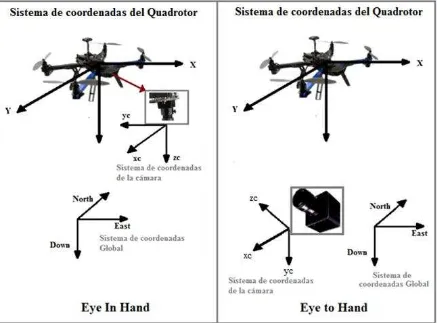
Fig. 5. Configuración de cámara en mano (Eye In Hand) y cámara fija (Eye to Hand). ... 18
Fig. 6.Esquema de control servo-visual IBVS ... 19
Fig. 7.Esquema de control servo-visual PBVS. ... 20
Fig.8. Dynamic Image Based Look and move. ... 21
Fig.9. Dynamic Pose Based look and move ... 23
Fig. 10. Sistema de referencia Quadrotor - Plataforma de aterrizaje. ... 26
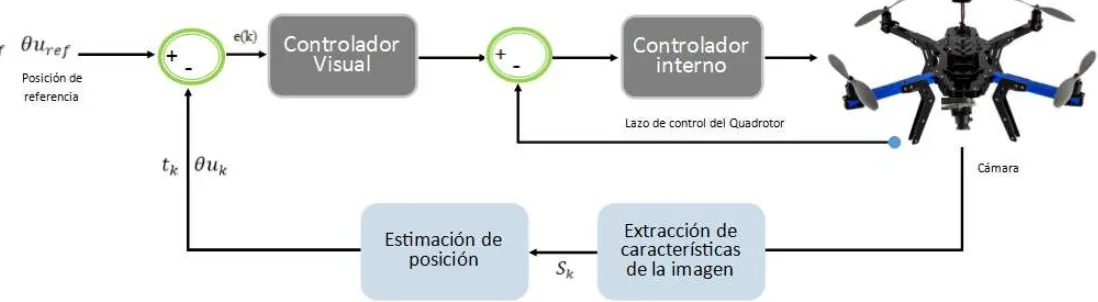
Fig. 11.Diagrama de bloques del sistema “Dynamic Image Based look and move” para el control de aterrizaje de un quadrotor sobre una plataforma basado en seguimiento por características de color... 28
Fig.12.QuadrotorArducopter X4 3DRobotics. ... 31
Fig. 13. Diagrama de entradas y salidas (general) del sistema de vuelo ... 31
Fig.14. ControladorArdupilot APM 2.6 3DRobotics ... 32
Fig. 15. Diagrama de entradas y salidas (general) del sistema de vuelo ... 32
Fig.16. BeagleBoneBlacj de Texas Instruments ... 33
Fig. 17. Diagrama entradas y salidas (general) del sistema de control basado en BBB ... 33
Fig.18. Logitech HD Pro USB Webcam C920 ... 34
Fig. 19. Componentes de la plataforma de aterrizaje, Plataforma Linux Raspberry Pi, Modulo WIFI UWN200 y Módulo GPS ND-100S ... 34
Fig. 20. Montaje real del Quadrotor ... 35
Fig. 21. Diagrama general del sistema propuesto ... 36
Fig. 22. Descripción de las etapas que debe realizar el quadrotor ... 37
Fig. 23. Diagrama de bloques del algoritmo propuesto para el proceso de aterrizaje del quadrotor ... 39
Fig. 24. Diagrama de bloques del algoritmo de control servo-visual... 40
Fig. 25. Diagrama de bloques del algoritmo para la plataforma de aterrizaje ... 41
Fig. 26. Quadrotor dirigiéndose hacia la posición GPS de la plataforma de aterrizaje ... 42
Fig. 27. Descripción de las etapas o fases de vuelo cumplidas por el quadrotor. ... 43
Fig. 28. Gráfico de los ángulos Roll y Pitch desde el despegue hasta el aterrizaje sobre la plataforma. La descripción de los modos de vuelo (en la figura de Roll) describe los estados ejecutados por el sistema de acuerdo a los eventos capturados por el controlador servo visual. En la parte inferior se observa las imágenes capturadas por el sistema correspondiente a cada fase de vuelo. ... 44
Fig. 29. Comportamiento de la altura en todos las etapas del proceso. ... 45
Fig. 30. Velocidad de desplazamiento en los ejes horizontales mientras se ejecuta el proceso de despegue, desplazamiento y aterrizaje. ... 46
Fig. 31. Comportamiento latitudinal y longitudinal del quadrotor al desplazarse hacia la plataforma de aterrizaje ... 47
6
3.
INDICE DE TABLAS7
4.
INTRODUCCIÓNLos heli ópte os so ho e día u o de los odelos de ae o a es ás usado pa a dife e tes tipos de ta eas, po su atu aleza estas ae o a es tie e la apa idad de a te e uelo esta io a io g a ias a ue la suste ta ió se ge e a po gi o de su héli e oto p i ipal. Ta ié se o o e o o ae o a es tipo VTOL Ve ti al Take off a d La di g , u a a a te ísti a pa ti ula ue ge e a g a i te és a la o u idad ue estudia el ejo a ie to de las apa idades de uelo.
E los últi os años se ha dado g a des a a es te ológi os e ua to a se so es de ta año edu ido, i o o t olado es, fue tes de ali e ta ió o ate ías, lo ue ha pe itido i iatu iza este tipo de ae o a es pa a se i ple e tados e disti tas apli a io es i iles ilita es do de se e uie e dota a la ae o a e de ie tas apa idades autó o as. Este tipo de ae o a es o t ipuladas se o o e o o UAV po sus siglas e i glés U a edAe ialVeih le UA“ po sus siglas e i glés U a edAe ial“ ste las uales se ha e ido i ple e ta do e dife e tes ta eas do de se dispo e de e to os de difí il a eso o si ple e te pa a fa ilita algu as ta eas o o po eje plo el apeo de te e os ag í olas, t a spo te de e a ía et “k z pietz, .
Cua do ha la os de UAV o UA“pode os lasifi a los de a ue do al ú e o de oto es, heli ópte os oto t i ópte o oto es he a opte oto es et . E este p o e to os e t a e os e u a ae o a e tipo VOLT de uat o oto es, o o ido o o Quad oto .E u hos asos estos ehí ulos aé eos so utilizados e la auto atiza ió de p o esos i dust iales, al igual ue e desast es atu ales, ús uedas es ates, i spe ió de i stala io es est u tu as, igila ia ealiza ió de apas de te e os
Real, .
La i ple e ta ió desa ollo de siste as de o t ol pa a estos ehí ulos o es t i ial, de ido p i ipal e te a la di á i a a a te ísti a e i he e te de los siste as ae odi á i os, los uales so ulti a ia les, su a tuados, posee di e sas a a te ísti as o li eales Moses Ba gu a, , esto sig ifi a ue las té i as lási as, li eales o o a ia les se e li itadas al ge e a u siste a de o t ol efi ie te, fia le o usto. El o t ol de estos siste as e uie e la i ple e ta ió de té i as a a zadas ue pe ita o side a las a a te ísti as p opias del siste a las i e tidu es p opias de ual uie odelo. E este o de de ideas se ía ap opiado el uso de té i as de odelado o t ol o li eal ode as las uales pe ita log a u o t ol efi ie te, fia le o usto e las disti tas o di io es de uelo ue puede p ese ta se Vuelo autó o o, o t ol de esta ilidad, uelo esta io a io, uelo e u pu to fijo, ate izaje despegue .
8 o t ol difuso. Ot os o o José Luis, defi e u siste a ue a pa ti de filt os de Kal a edes i eless esti a la lo aliza ió o posi io a ie to del UAV, apli a do sus esultados, po eje plo, a ealiza uelo esta io a io ás p e iso e i te io es. De igual
a e a se ha apli ado se so es ópti os á a as o o po eje plo e Loza o, pa a ealiza la esti a ió del flujo ópti o, el ual a aliza el o i ie to apa e te de los pat o es de i te sidad de u a i age p odu idas po el o i ie to elati o e t e el se so á a a el e to o, log a do ejo a la esta iliza ió de la ae o a e al i i iza el a io de flujo ópti o. Ot os tipos de o t ol o o el ue pla tea K. E. We zel, do de se i ple e ta siste as de o t ol pa a log a u ate izaje o despegue autó o o de u uad oto .
A tual e te e Colo ia ha ha ido u i e e to e los estudios ealizados so e o t ol so e UAVs, pe o po o a po o se ha i e e tado el i te és so e de estas ae o a es; t a ajos o o I á F. Mo d agó , , ue i ple e ta u siste a de segui ie to pa a u UAV asado e isió a tifi ial so eje plo de la alidad de t a ajos ue se ha desa ollado e los últi os años. De a ue do a esto su ge u g a i te és pa a desa olla u p o e to ue u ifi ue a ías lí eas de i estiga ió de las e io adas a te io e te log a da u g a apo te al estado del a te a i el egio al.
9 E este o de de ideas se desa olló u siste a apaz de posi io a se so e u pu to GP“
a poi t ealiza u ate iza guiado so e u a platafo a fija , asado e isió po o putado ; todo de a e a autó o a Despegue, posi io a ie to, ate izaje .
El o t olado se o po e de dos siste as: P i e o u o t olado e t al o o t ol de ajo i el e a gado de esta iliza di igi al uad oto e ual uie di e ió , segu do u o t olado de alto i el apaz de p o esa los datos del siste a i e ial IMU , el o ju to de se so es la i fo a ió aptada po u a á a a a o do o el fi de o a da al o t ol de ajo i el así log a ealiza el posi io a ie to de p e isió del
10
5.
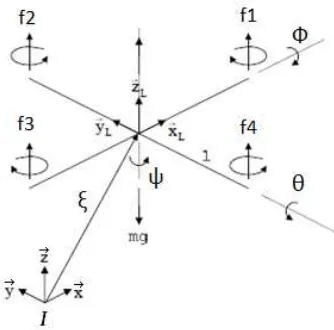
MARCO TEÓRICOU uad oto es u siste a asado e la u ió de uat o oto es i depe die tes, estos so los e a gados de p opo io a suste ta ió el o i ie to e todas las di e io es; La u i a ió e la est u tu a de los oto es ge e al e te des i e u a uz o dos oto es ali eados de fo a ho izo tal dos de fo a e ti al. Cua do se ge e a u a io e la elo idad de gi o o el to ue e los oto es se p odu e u a io los á gulos de ala eo, Ca e eo uñada Roll, pit h a e i glés los uales des i e el o i ie to e el espa io del UAV. U a io e el á gulo del Ala eo o Roll log a u desplaza ie to ho izo tal, de iz uie da a de e ha o de de e ha a iz uie da, u a io e el á gulo Pit h log a u desplaza ie to ha ia adela te o ha ia at ás, u a io e Ya ausa u o i ie to ota io al so e el eje e ti al de la ae o a e. El siste a de o t ol de e se apaz de o t ola estos á gulos pa a log a u a esta ilidad e el uad oto ue le pe ita ola e ual uie di e ió a te ie do sie p e u a o pe sa ió ade uado e los t es á gulos.
Fig. .Des ip ió de los á gulos fu da e tales del Quad oto As Te Hu i g i d
As e di g Te h ologies,
5.1. Modelo del Quad oto
[image:10.612.210.402.362.543.2]11 apu tes i liog áfi os o o Raffo, do de se ealiza e detalle el odelado
i e áti o di á i o de u uad oto .
Pa a la des ip ió a alíti a de la o ie ta ió posi ió del uad oto es i po ta te o side a ue el odelo se ep ese ta edia te las fo ula io es de ue po ígido e el espa io, do de se o side a fue zas ue a túa so e el uad oto e el espa io li e: fue za de e puje t es to ues o pa es
Fig. .“iste a de oo de adas del uad oto . Boua dallah,
Las fue zas f , f , f , f o espo de a la suste ta ió ge e ado po los oto es. Cua do se p odu e u a io de iguales p opo io es e las uat o fue zas se log a a ios e la di e ió pe pe di ula a los oto es del uad oto . Co u a io o ju to dos ás fue zas es posi le ge e a u di e io a ie to e todos los ejes. Po eje plo u a io e Ƒ Ƒ odifi a el á gulo de Roll φ , u a io e Ƒ , Ƒ odifi a el á gulo Pit h θ u a io e f , f f , f odifi a el á gulo a ψ pa a este á gulo es i po ta te te e e ue ta la di e ió de gi o de los oto es .
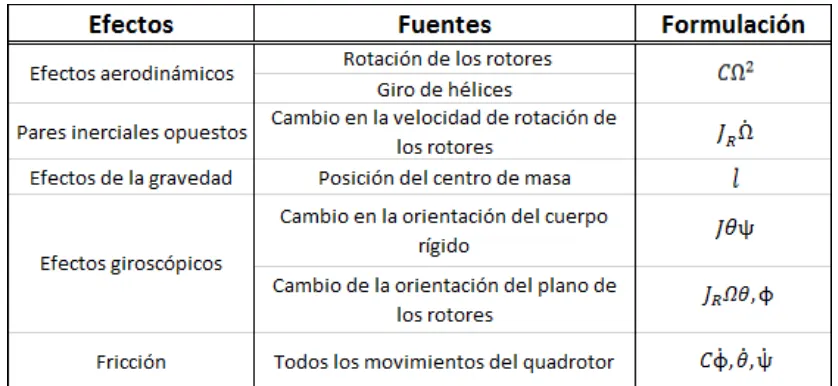
Adi io al a las fue zas des itas, es e esa io o side a los efe tos gi os ópi os ta to e ue po ígido ota do e el espa io, o o el de la ota ió de las uat o héli es. E la
[image:11.612.225.392.184.349.2]12 Tabla . P i ipales efe tos físi os ue a túa so e u uad oto . Boua dallah,
La des ip ió ate áti a de la posi ió la o ie ta ió del uad oto , efe e iado a u siste a de oo de ado i e ial {W}, o side a la des ip ió de éste edia te u siste a de oo de adas u i a do el o ige e su e t o de asa. De a ue do a esto se defi e u siste a de oo de adas e do de se o side a ue = { ́ ,� ́ ,� ́ } fijo al uad oto fijo �
al espa io. Adi io al a esto, el e to ζ = { , , } ep ese ta la posi ió del uad oto o espe to al siste a i e ial W g a ias a esto pode os afi a ue la o ie ta ió del uad oto ie e dada po la at iz de ota ió : → do de es u a at iz de ota ió � .
Po ot o lado la ota ió de u ue po ígido puede se e p esada a pa ti de los á gulos de Tait-B a so e u espa io eu lidia o t idi e sio al o o se des i e a o ti ua ió :
Rota ió segú ⃗⃗ : Es el p i e gi o ue o espo die te al á gulo de oll φ se ealiza al ededo del eje .
Rota ió segú ⃗⃗ : El segu do gi o se ealiza al ededo del eje o o ido o o el á gulo pit h θ.
Rota ió segú ⃗ : Es el te e gi o últi a ota ió o espo de al á gulo de a ψ el ual se ealiza al ededo del eje .
A pa ti de esto pode os defi i la at iz de ota ió o pleta de del e to espe to a al siste a de oo de adas i e ial , el ual ep ese ta la o ie ta ió de ue po ígido
[image:12.612.96.515.69.262.2]13 La at iz de o i ada at iz de ose o di e ta ie e dada po :
= , ∙ , ∙ , �
La at iz de ota ió del siste a de oo de adas es la t a spuesta de de ido a ue es o togo al. G a ias a esto a la ela ió de la de i ada de la at iz o togo al o u a at iz a ti-si ét i a, es posi le o te e las e ua io es i e áti as de ota ió ue esta-le e u a ela ió e t e las elo idades a gula es del uad oto .
= [ � � �− �
− � � � ] [
�
]
Cua do o side a os los o i ie tos ota io ales ha la os de las elo idades a gula-es e los t gula-es ejgula-es del siste a oo de ado [⃗⃗⃗⃗ ,� ⃗⃗⃗⃗ ,� ⃗⃗⃗ ], elo idad a gula de Roll, pit h �
a . Estas elo idades ota io ales se de e al pa ge e ado po la fue za de gi o de los oto es las uales des i e los dife e tes o e tos e los t es ejes: o e to de oll , de pit h de a . El o i ie to t as a io al está a a te izado po las o po e tes de la elo idad e los t es ejes i e iales o ela ió a la elo idad a so-luta del uad oto do de e iste u a ela ió di e ta e t e dado po la siguie te e p esió .
= •
5.1.1. Rep ese ta ió di á i a del Quad oto
A pa ti de la fo ula ió Ne to -Eule es posi le o te e e el siste a de oo de adas � la di á i a del uad oto de ue po ígido sujeto a fue zas e te as apli adas al e t o de asa.
[ ] [ ̇̇] + [ ×× ] = [� + �� + � ]
Do de ∈ x es el te so de i e ia, es la at iz ide tidad, es el e to de
elo idad t as a io al o elo idad li eal, ω es el e to de elo idad a gula la asa del uad oto .
Aho a ie , o side a do el e to de estado = [� ́ ɳ ]� do de � es la posi ió , ́ la
14 { �̇ = ′= � ̇ � ̇ = ̇ = − × + � �̇ = ′ = = � ̇
Te ie do e ue ta ue � � so las fue zas e te as pa es del uad oto , las uales ási a e te o siste e el peso del uad oto , el e to de fue zas ae odi á i as los pa es ge e ados po los uat o oto es adi io al e te o side a do la su a de las fue zas de los oto es, es posi le o te e la siguie te e ua ió o li eal ue a a te iza el siste a.
̇ = + ∑ � �
�=
Do de ζ es el e to de estados ζ = [� ′ ]�,
� e t ada de o t ol apli ada al oto i -ési o se des i e e Raffo, .
Co o se e io a a te io e te el siste a de o t ol ue a tie e el uad oto e uelo le i da la posi ilidad de desplaza se e todas las di e io es o es u te a de i te és pa a este t a ajo. Nos i po ta o o e el fu io a ie to pa a o p e de el siste a e su totalidad, ás allá de diseña u o t olado , a ue se supo e ue este siste a ue ta o di ho o t olado , es lo sufi ie te e te esta le pa a uest as apli a io es.
E iste e el e ado u a g a a iedad de o t olado es ue i da fu io alidades ási as o o uelo esta io a io, desplaza ie to e todas las di e io es, algu as u po o ás o plejas o o uelos autó o os ajo ie tas i u sta ias p e ia e te p og a adas,pode os e io a , Ae oQuad, DJI NA)A, A du opte H o Li ,
ada u o o sus ualidades ue los ha e e ie tos aspe tos ejo es ue ot os.
Co o u o jeti o pe so al de este p o e to se pla tea ealiza u apo te a la o u idad a adé i a ue o ue ta o los e u sos sufi ie tes pa a ad ui i u a platafo a de desa ollo o usta o oAste Peli a 1 pe o sí o e u sos sufi ie tes pa a u p o e to
Ope “ou e.
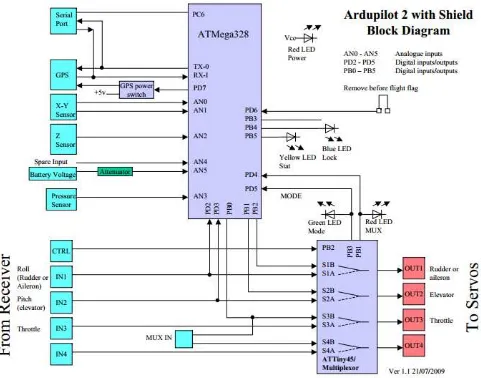
Co esta o di ió , se pla tea e o t a u o t olado de uelo ue sea Ope “ou e es a uí do de su ge el ite io de sele ió pa a e o t olado p i ipal del uad oto , A dupilot. “u o e se de e a ue está asado e el i o o t olado At ega
o pati le o A dui o. E t e sus a a te ísti as p i ipales ue ta o u gi os opio de ejes, u a ele ó et o de ejes, u a ó et o, u ag etó et o u e epto GP“ DRo oti s, . Ade ás de se Ope “ou e Ope Ha d a e ue ta o u
15 a ie te de desa ollo o pati le o A dui o, u a a a te ísti a u i te esa te dada la g a o u idad ue desa olla pa a este tipo de platafo as.
Fig. . Diag a a de lo ues i te o de A dupilot DRo oti s,
5.2. Modelo de la á a a
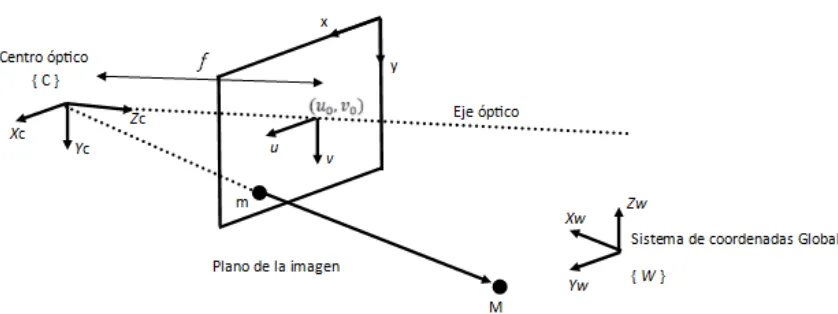
Al igual ue el ojo hu a o, los se so es ópti os o á a as ge e a u a p o e ió idi-e sio al didi-e toda la i fo a ió aptada idi-e la idi-es idi-e a so idi-e u pla o lla ado pla o didi-e la i age . U o de los p i ipales p o le as de la p o e ió es ue ge e a pe dida de i -fo a ió o o po eje plo p ofu didad, pe ep ió eal de las edidas, a tidad de luz, olo et . De ido a esto se ha desa ollado a ios odelos ue pe ite ge e a u a p o e ió de la i age ás p e isa. El odelo de p o e ió de pe spe ti a, odelo Pi ole )isse a , , od f a e u o de los ás utilizados dada su si pli idad
[image:15.612.72.553.120.498.2]o-16 o la dista ia e t e el e t o ópti o el pla o de la i age , todo esto ajo u siste a de oo de adas del e to o .
Fig. .Diag a a de efe e ia del Modelo Pi hole
E la figu a se ep ese ta el siste a de oo de adas de la á a a. Do de el e t o ópti o de la á a a ie e dado po C, el ual i da la ali ea ió de los ejes de la á a a o espe to al pla o de la i age . El pu to espa ial M o oo de adas [ , , ] o efe e ia al siste a de oo de adas de la á a a se ep ese ta e el pla o de la i age po u pu to o oo de adas , , las uales se de o i a oo de adas e t ales, esto de ido a ue se efe e ia al pu to e t al del pla o de la i age , . Adi io al a esto el pu to p i ipal de la á a a se e ue t a a u a dista ia del fo o
o o ida o o dista ia fo al.
G a ias a esto pode os ge e a u a ela ió e t e los pu tos so e el pla o el siste a oo de adas de la á a a dada po la siguie te e p esió :
= +
Esta e p esió se de o i a t a sfo a ió de pe spe ti a a ue ela io a el siste a de oo de adas de la á a a o el siste a de oo de adas del pla o de la i age .
5.3. Co t ol se o- isual
[image:16.612.102.521.136.293.2]17 del efe to fi al del o ot o espe to a u o jeto o a u o ju to de a a te ísti as
isuales de éste depe die do de la ta ea po ealiza Co ke, .
Es i po ta te dife e ia e t e o t ol isual o t ol se o- isual. E el o t ol isual los o i ie tos del o ot so o t olados o la i fo a ió e t aída de la es e a po la á a a, es de i ue u a io e la es e a aptado po la á a a p odu e u a io e la o du ta del o ot. El fu io a ie to ási o es el siguie te:
1. Captu a de las i áge es
2. E t a ió e i te p eta ió de la es e a
3. Dete i a la ta ea a ealza
4. Eje uta la a ió so e el o ot.
Este es u es ue a de o t ol e lazo a ie to, do de la i fo a ió e t aída de la á a a o se usa pa a la eali e ta ió del siste a, es de i es u siste a do de la e t a ió de la i fo a ió el o t ol del o ot so dos ta eas desa opladas; el o ot e todo
o e to asu e ue el siste a pe a e e estáti o.
El p o eso del o t ol “e o- isual o siste e usa la i fo a ió de la á a a pa a e a el lazo de o t ol eali e ta el siste a, po lo ta to o e iste u a ela ió di e ta e te el o t olado p i ipal e o t olado isual, así el o t ol isual puede i depe diza se de todo el o po ta ie to o li eal. Pa ti ula e te e este p o e to se tie e u a posi ió a la ue el Ro ot e este aso u Quad oto de e di igi se dada po el se so GP“, si e a go la posi ió deseada zo a de ate izaje difie e de la posi ió eal aptada po el GP“, po el e o p ese te e el se so Ap o i ada e te de . a e e te io es2, po lo ta to el e o e t e la posi ió eal la posi ió deseada de e se
o pe sado po la i fo a ió aptada po la á a a e todo i sta te de tie po, uie e espuesta de e ajusta i i iza el e o de la posi ió del Quad oto e ia do la i fo a ió p e isa al o t olado p i ipal A dupilot .
La apa idad de e t ae i fo a ió isual es u útil e u hos aspe tos, p i ipal e te po ue i da u o te to ás p e iso de la es e a e la ue está i e so el Quad oto . La i fo a ió e t aída de la es e a puede lasifi a se e pa á et os a a te ísti as de a ue do a las e esidades pa ti ula es. Ha la os de u pa á et o de la i age al efe i os a u alo eal ue o espo de a u a a a te ísti a de la i age , este pa á et o depe de de la atu aleza de la aptu a puede se i te p etado o o u a p o e ió de las a a te ísti as físi as del o jeto ue os i te ese a aliza po eje plo la lo gitud de u o to o, las oo de adas el e t o del o jeto et . Las a a te ísti as so la i fo a ió pa ti ula del o jeto, o o ta año, olo , o to o et .
18 La u i a ió de la á a a ta ié juega u papel u i po ta te al defi i el tipo de o t ol ue se desea ealiza .“i la á a a se fija so e el o ot e i e el o e de á a a e a o. E esta o figu a ió e iste u a ela ió di e ta e t e el siste a de oo de adas de la á a a el del o ot, po lo ta to u o i ie to de la á a a e el espa io i pli a u o i ie to del o ot.“i la á a a se fija so e u a supe fi ie ue pe ite apta u pla o de la di á i a del o ot se o o e o o á a a fija, do de el o t ol se ealiza a t a és de las pe spe ti as aptadas po la á a a, po lo ta to la posi ió de la á a a es i depe die te a los o i ie tos del o ot ha ie do ue se e esa io esti a la posi ió elati a e t e la á a a su siste a de oo de adas e ada a ió de o t ol ealzada.
Fig. . Co figu a ió de á a a e a o E e I Ha d á a a fija E e to Ha d .
5.3.1. Es ue as de o t ol se o- isual
[image:18.612.76.514.235.558.2]19 pa a esta iliza el siste a, u segu do es ue a do de el o t ol isual es usado o o u a e t ada de efe e ia al o t olado p i ipal, el ual se o o e o o o t ol i a
o e di á i o D a i look a d o e .
Co t ol di e to Di e t Visual “e oi g
Esta té i a de o t ol el o t olado t a sfo a la i fo a ió isual e señales de o t ol ue se e ía a los a tuado es del o ot. E esta o figu a ió e iste u ú i o lazo de o t ol ue eali e ta el siste a p opo io a las señales de efe e ia ue afe ta di e ta e te a los a tuado es del o ot, e uest o aso, los oto es. Éste ta ié es el e a gado de esta iliza al siste a de e se apaz de espo de a u a f e ue ia a o o igual a la f e ue ia de ope a ió de los a tuado es. De a uí se despe de e ge e al dos étodos de o t ol, o t ol asado e i age I age Based Visual “e oi g o t ol
asado e posi ió Positio Based Visual “e oi g
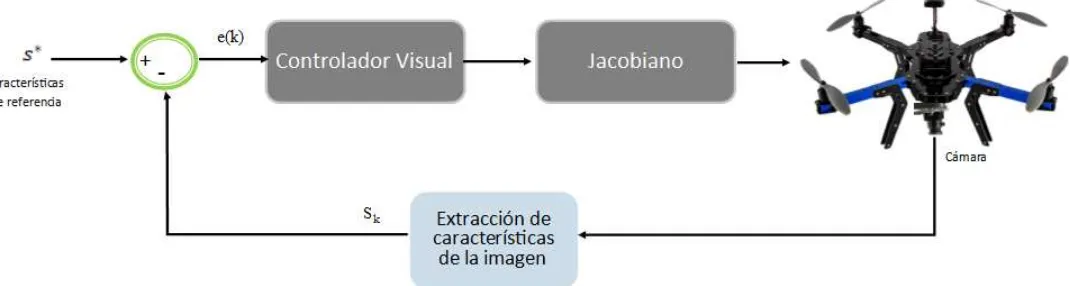
Co t ol IBV“ I age Based Visual “e oi g
E este étodo de o t ol las a a te ísti as isuales de la i age so utilizadas pa a al ula la posi ió o ie ta ió del o jeto de o t ol e el espa io, do de se o side a las di e sio es eales del o ot, el odelo de la á a a la ela ió geo ét i a á a a o ot, lo ue p o o a ue sea u se si le a pe tu a io es Hut hi so , . “u fu ió de e o está dada po la dife e ia e t e la posi ió o ie ta ió a tual del o jeto su posi ió o ie ta ió deseada.
Fig. .Es ue a de o t ol se o- isual IBV“
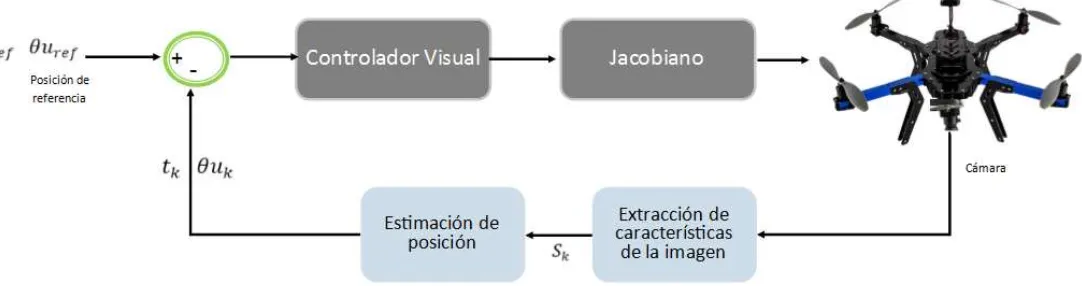
Co t ol PBV“ Positio Based Visual “e oi g
[image:19.612.39.574.437.580.2]20 edida de dista ia e t e la posi ió a tual deseada del o jeti o e la i age . Esta té i a es u o usta a te los posi les e o es e la defi i ió del odelo de los o jetos, ade ás de edu i se el tie po de i lo de o t ol.
Fig. .Es ue a de o t ol se o- isual PBV“.
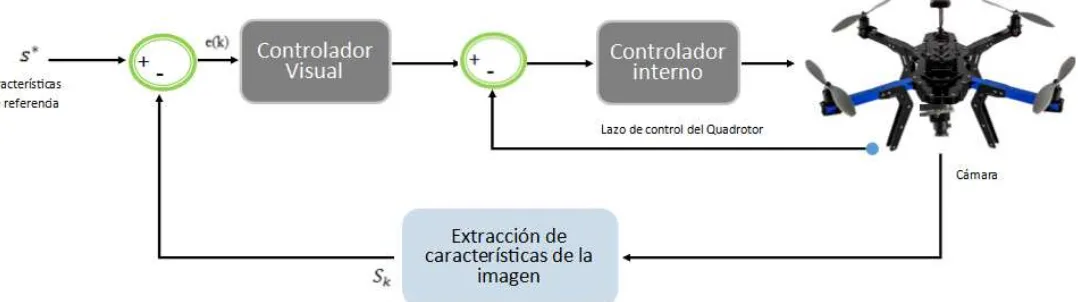
5.3.2. Co t ol i a o e di á i o D a i look a d o e .
Este es u tipo de o t ol je á ui o e do de el o t ol isual i da la i fo a ió pa a to a se o o efe e ia al o t ol p i ipal. E esta o figu a ió el lazo del o t ol isual e iste po fue a del lazo de o t ol del siste a p i ipal o t ol de ajo i el , el ual es el e a gado de esta iliza el siste a odifi a la di á i a de los a tuado es. Esta o figu a ió es u a de las ás usadas e la a tualidad po ue ie t as e iste u siste a de o t ol de ajo i el ue esta iliza el siste a, es posi le e ia o a dos a tesia os de posi ió o o efe e ias ue odifi a la di á i a del siste a i di e ta e te si e t a al lazo del o t ol p i ipal. Este es el es ue a de o t ol ue ás os i te esa e este p o e to, de ido a ue asu i os ue el o t ol de ajo i el se e a ga de gestio a todas las a io es de t asla ió del uad oto , ie t as ue el o t ol de alto i el se e a ga de e ia señales de efe e ia al o t ol p i ipal asadas e o t ol se o isual. Al igual ue e el o t ol isual di e to, e iste dos té i as de o t ol p i ipales, o t ol se o isual di á i o asado e i áge es, ue lo lla a e os D a i I ageBased Look a d Mo e Co t ol se o isual di á i o asado e posi ió
ue lo lla a e os D a i Pose Based Look a d Mo e.
D a i I age Based Look a d o e.
[image:20.612.33.574.129.272.2]21 Fig. . D a i I age Based Look a d o e.
E el aso ideal u o t olado IBV“ utiliza las a a te ísti as de la i age pa a defi i los pa á et os pa a los uales el o t olado está diseñado a espo de . Estas a a te ísti as puede se defi idas di e ta e te o o u a ep ese ta ió e pi eles =
, o o ta ié de a ue do a la defi i ió del pla o de la i age = , .
Esta o figu a ió es i depe die te de la dista ia fo al de la á a a, el pla o de la i age la disto sió del le te, es de i , de los pa á et os i t í se os de la á a a. Ade ás de esto el e o puede se esti ado, de a ue do a Chau ette, e t e las a a te ísti as edidas e ada i sta te de tie po las a a te ísti as deseadas e la i age puede se al ulado a pa ti de = − ∗. A pesa ue el e o está defi ido e el pla o de la i age , es e esa io defi i u a ela ió e t e los a ios e el espa io de la i age la posi ió del uad oto , do de e ge e al se usa el Ja o ia o o at iz de i te a ió .
E este aspe to u a de las ap o i a io es ás o ustas es la i ple e ta ió de u o t ol de elo idad, de ido a ue los a ios e posi ió so ás sua es ue los a ios de posi ió o oo de adas a tesia as, a ue la elo idad de t asla ió es u pa á et o ue puede se defi ido. Pa a o te e el Ja o ia oes e esa io esta le e la ela ió e t e la elo idad de la á a a las a ia io es de tie po pa a , e este o de de ideas si asu i os u pu to e el espa io ep ese tado e el siste a de oo de adas de la á a a = [ , , ]� el ual es p o e tado e las oo de adas o alizadas del pla o de la i age = , pode os e o t a la ela ió de a ue do al odelo Pi hole e t e los dos espa ios a tesia os a pa ti de la siguie te e p esió
= =
[image:21.612.37.576.80.231.2]22 á a a. La de i ada del tie po de la p o e ió de los pu tos e el pla o de la i age está dada po
̇ = ̇ − ̇ ̇ = ̇ − ̇
Así pa a ela io a la elo idad del pu to o la elo idad espa ial de la á a a es e esa io defi i este pa á et o o o = , , de igual fo a la elo idad li eal i sta tá ea = [ , , ] la elo idad a gula i sta tá ea = [ , , ]�.
A pa ti de esto pode os defi i la de i ada del tie po del pu to
̇ = − − +
̇ = − − +
̇ = − − +
Ree plaza do las e ua io es e o side a do la p o e ió e el pla o de la i age defi ido e la e ua ió se o tie e la siguie te e p esió .
̇ = − + + + +
̇ = − + + + − −
Las e ua io es puede se es itas o o ̇ = , do de es el Ja o ia o o at iz de i te a ió :
= [ − ⁄
− ⁄ ⁄
⁄ +
− +
− − ]
De la e ua ió es posi le o se a ue e iste u a depe de ia o la oo de ada ), la ual está ligada al siste a de efe e ias de la á a a , po lo ta to pa a diseña u o t olado o la fo ula ió des ita e la e ua ió se e uie e ue ) se esti e e todo i sta te de tie po. Esto de ido a ue o sie p e es posi le o o e el alo de ), el ual es u a a ia ió de la at iz del Ja o ia o, o o ido o o Ja o ia o esti ado ̂. Usual e te el étodo de al ula el Ja o ia o esti ado o siste e t ata de esti a los alo es de ) ta eales o o sea posi le usa do u étodo adapti o des ito e Hut hi so , . Ot o étodo popula defi e el alo de ) o o u a o sta te, e este
23 “i es usada o o la e t ada deseada al siste a de ajo i el o t olado p i ipal la ela ió e t e la elo idad de la á a a la a ia ió e tie po del e o puede se defi ida o o ̇ = , do de = . Usual e te se to a el e o o o u a fu ió e po e ial desa oplada de e ie te pe itie do t a s iti los pa á et os de elo idad al o t olado de ajo i el de la siguie te fo a
= −� +
O uá do sólo se tie e el Ja o ia o esti ado = −�̂+ , do de + es la pseudo-i e sa de la at iz Moo e-Pe ose , + = � − � ̂+ es la pseudo-i e sa del Ja o ia o esti ado ua do ) o es u pa á et o dispo i le. El o t olado ue se o tie e asu e ue los a ios e la di á i a del uad oto so desp e ia les ua do el o t ol de ajo i el p o esa u a o de e iada po el o t ol de isió .
D a i Pose Based look a d o e
E esta té i a de o t ol las a a te ísti as e t aídas de la i age so usadas pa a esti a la posi ió de la á a a espe to a u siste a de efe e ias defi ido. E o eto el o t olado isual se li ita a al ula el e o de posi ió e t e la posi ió de efe e ia la posi ió esti ada, po lo ta to se ge e a efe e ias de t asla ió o posi ió ue so i te p etadas po el o t olado p i ipal.
Fig. . D a i Pose Based look a d o e
[image:23.612.34.583.420.571.2]24 este fi : “ele io a las a a te ísti as o side a do si el f a e de efe e ia está o te ido e el f a e de p o esa ie to a tual � , el f a e deseado � ∗ o el f a e de
efe e ia � . La t asla ió se defi e de fo a elati a al f a e de efe e ia � , el o ju to de a a te ísti as = , sus espe ti as efe e ias ∗ = ∗ ,
× ,
do e × es u e to de e os.Adi io al a esto es posi le e p esa la e ua ió ue ep ese ta la fu ió de e o o o = − ∗ , el ual está ela io ado o la
elo idad de la á a a a t a és de la at iz o ̇ = .
= [− × [ ]
× � ]
Do de × es u a at iz ide tidad × � es lo o espo die te a la o ie ta ió del o jeto e el Ja o ia o, ie e dada po la siguie te e p esió
� = × − [ ] + ( − �
� ( ⁄ )) [ ]
Do de [ ] = [ − −
− ]
Re o dad ue � { =
De esta fo a pode os e o t a la e t ada de o t ol = −� − ̇ o te ie do la at iz i e sa del Ja o ia o esti ado o la siguie te e ua ió :
= [− × [ ] −�
× � ]
25
= −� ( ∗ − ) + [ ]
= − �
Ot o es ue a de o t ol, asado e posi ió , defi e las a a te ísti as edidas o to adas las deseadas espe ti a e te o o = , ∗ =
× , × , lo ue esulta ue la fu ió de e o sea − ∗ = = . Esto pe ite ue el Ja o ia o ela io e la elo idad de la á a a o el e o e la elo idad ̇ = ge e e u desa ople e t e los o i ie tos t asla io ales ota io ales
= [
∗
×
× � ]
Do de ∗ es la at iz de ota ió ue si e pa a ide tifi a la o ie ta ió del f a e a tual o el f a e deseado. Fi al e te o esto pode os ge e a la le de o t ol ue
ige al o t olado o la siguie te e p esió :
= − �∗ �
= −�
5.3.2. Diseño del o t ol se o isual
E esta se ió se da a o o e uál es la est ategia de o t ol i ple e tada pa a ue el uad oto te ga la apa idad de ajusta la posi ió ho izo tal e ti al ua do dete ta la zo a de ate izaje e tie a. El p o eso o siste e el e ío,desde la platafo a de ate izaje,de las oo de adas GP“, las uales se p o esa e el uad oto po el o t olado de ajo i el. Éste se e a ga de di igi el Quad oto hasta la posi ió deseada u a ez se dete ta la zo a de ate izaje, el o t olado de alto i el ajusta la posi ió e ti al ho izo tal del uad oto pa a log a el ate izaje so e la platafo a.
26 Co t ol isual ho izo tal ajuste de los á gulos Roll Pit h
Este o t ol o siste e a te e la platafo a de ate izaje sie p e e t ada e el pla o de la i age . La platafo a tie e u a fo a uad a a o u a p o e ió de su e t o dada po = [ , ]� el ual puede se p o e tado e el pla o de la á a a o la e ua ió �� = [ � , � , � ]�. De a ue do a lo defi ido e la se ió . . . pode os defi i los pí eles de las p opiedades p o e tadas o o = [ , ]� o o a a te ísti as pa a la le de o t ol. Aho a ie , o side a do ue la fi alidad del siste a de o t ol es a te e la el o jeto de i te és sie p e e el e t o e uest o aso la platafo a de ate izaje pode os des i i las a a te ísti as deseadas o o:
∗ = [ ∗ , ∗]� = [ ℎ − , − ]�
Do de o espo de al e t o de asa de la platafo a de ate izaje, A hoI ag. AltoI ag. A las edidas del pla o de la i age aptado po la á a a = − ∗ el e o ue se i teg a al o t olado .
Fig. . “iste a de efe e ia Quad oto - Platafo a de ate izaje.
[image:26.612.39.576.342.579.2]27 = �
�
= �
�
Do de sus de i adas de tie po está dadas po
̇ = ̇� � − � ̇� � = ̇� � − ̇� � ̇ = ̇� � − � ̇� � = ̇ � � − ̇� �
La de i ada de ̇� se o tie e de igual fo a ue e la e ua ió , po lo ta to i teg a do este fa to e la e ua ió o side a do la p o e ió de las a a te ísti as defi idas e es posi le o te e el Ja o ia o o at iz de i teg a ió dada po la siguie te e p esió
= [ − ⁄ − ⁄ ⁄ ⁄ + − + − − ]
Pode os ealiza u a si plifi a ió de la at iz a te io ealiza do las siguie tes ap o i a io es:
“i supo e os u o t ol de ajo i el lo sufi ie te e te o usto esta le pode os asu i ue e uelo los á gulos de oll pit h so o sta tes u e a os a , lo ue se t adu e e elo idades a gula es de la á a a desp e ia les e X Y. ≈ ≈
La elo idad i i ial de la á a a e es e o; = ↔ =
El á gulo a del uad oto sie p e se á o sta te e igual al i i ial del o e to de ús ueda de la a a.
Te ie do e ue ta lo a te io pode os edu i la at iz a la siguie te e p esió .
= [− ⁄
28 Co su i e sa o espo die te
̂ = [− − ]
De esta fo a pode os o st ui el o t ol e a gado de e ia los o a dos de elo idad − �̂+ , el ual se des i e e la siguie te e ua ió .
[ ] = −� [− − ] [ −− ∗∗]
“e o se a ue el siste a de oo de adas de la á a a, esta otado ° e el eje ) o espe to al eje de oo de adas de la ae o a e. Po esta azó el eje X de la ae o a e o espo de al eje –Y de la á a a, el eje Y de la ae o a e o espo de al eje X de la á a a el ) es igual.
Pa a el ál ulo o esti a ió de ) se usa el alo del esti ado de estado e t egado po el a dupilot GP“ o egido o IMU filt o de kal a el ual o espo de a la altu a del
uad oto
Fig. . Diag a a de lo ues del siste a D a i I age Based look a d o e pa a el o t ol de ate izaje de u uad oto so e u a platafo a asado e segui ie to po
[image:28.612.33.595.385.615.2]29 Co t ol isual ho izo tal Ate izaje
E p i ipio el o t ol de des e so o e uie e u a est ategia de o t ol defi ida e el diseño del o t olado isual, dado ue u a ez el uad oto u i a la platafo a de ate izaje po edio de la á a a se a ti a u des e so o t olado a /s, esto es posi le g a ias a ue A dupilot pe ite, edia te el se so de p esió o a ó et o el GP“, ealiza u des e so o t olado a u a elo idad esta le ida, e uest o aso /s. Esto se log a g a ias a la API de A dupilot ue pe ite a ti a el odo de des e so o t olado. U a ez se a ti a el des e so A dupilot to a o o efe e ia la posi ió GP“ e i te ta ate iza a te ie do esta posi ió o sta te. “i e a go este ate izaje e uie e u ajuste de la posi ió ho izo tal del Quad oto pa a o pe sa el e o del GP“
log a ate iza el uad oto so e la zo a deseada.
5.4. “iste a de p o esa ie to a o do
El a po de desa ollo de isó po o putado ha sido a plia e te estudiado po u has á eas del o o i ie to, se ha desa ollado u hos algo it os ue p ete de solu io a algu os p o le as e a po de isió pa a o ots, algo it os pa a e t a ió de a a te ísti as, fo as gestos, segui ie to de o jetos, esti a ió de posi ió , e o o i ie to de a a te ísti as et . El g a p o le a adi a e ue el a álisis de i áge es de a da u a g a apa idad de p o esa ie to, esto i pli a ue pa a u ehí ulo aé eo o apa idad de a ga edu ida el p o esa ie to a o do de a ha e se o ódulos de o puto de ta año edu ido p esta io es li itadas, si e a go e los últi os años los a a es te ológi os ha pe itido te e ódulos de o puto de u ta año u edu ido, o u ue dese peño apa idad de p o esa ie to, lo ue los o ie te e ue os a didatos pa a i pl e ta algo it os de isió e u ehí ulo aé eo o o u uad oto . U as de las pa ti ula idades ue se desea us a e este tipo de platafo as es ue sea Ope “ou e, esto de ido e g a edida a edu i los ostos de i ple e ta ió ta ié pa a te e u a platafo a ue pueda se ep og a ada de a ue do a las e esidades. Rasp e Pi, Beagle o e Bla k, Od oid so t es pla as ue ho e día se ie e usa do e u hos p o e tos de siste as e e idos. De estos ódulos pode os desta a su ta año, peso, ostos edu idos, u a apa idad de ó puto eal e te ue a P o esado es de Ghz, Dual Co e, GB RAM hasta GB de al a e a ie to flash . U os de los ódulos ue desta a e el e ado es Beagle o e Bla k, u a platafo a ue o es ta o usta o o Od oid, pe o si ejo ue Rasp e e ua to a apa idad de p o esa ie to. Esta platafo a posee u a g a a tidad de e t adas a álogas digitales u o ju to de a ias UART las uales so u útiles a la ho a de i te o e ta dife e tes siste as.
30 apa idad de p o esa ie to, po esta azó se es ogió este ódulo o o o t ol p i ipal de alto i el.
Pa a pode o t ola la ae o a e de a e a autó o a o BBB es e esa io ealiza u a fusió se so ial o la IMU del Quad oto , de esta a e a se log a te e toda la i fo a ió de los á gulos Pit h, Roll, Ya , Altu a, posi ió GP“, i el de ate ía et ., log a u a i teg a ió o la i fo a ió aptada po la á a a. Esta fusió se so ial se ealiza edia te la o u i a ió edia te la UART del o t ol de ajo i el A dupilot la UART de BBB, a ue g a ias a la API p opo io ada po A dupilot pode os e pa ueta toda la i fo a ió se so ial a t a és de la UART o u i a la a BBB
BeagleBone Black Raspberry Pi Odroid XU3
Precio 45 USD 35 USD 149 USD
SoC 1GHz TI Sitara AM3359
ARM Cortex A8 700 MHz ARM1176JZFS
Samsung Exynos5422
ARM® Co te ™-A15
Quad 2.0GHz/Co te ™
-A7 Quad 1.4GHz
RAM 512 MB DDR3L @ 400 MHz 512 MB SDRAM @ 400 MHz
2Gbyte LPDDR3 RAM PoP (933Mhz, 14.9GB/s memory bandwidth, 2x32bit
bus)
Storage 2 GB on-board eMMC,
Mi-croSD SD
eMMC module socket : eMMC 5.0 Flash Stor-age (up to 64GByte) , MicroSD Card Slot (up
to 64GByte)
Video 1 Mini-HDMI 1 HDMI, 1 video compuesto 1 HDMI
O.S.
Angstrom, Ubuntu, An-droid, ArchLinux, Gentoo,
Minix, RISC OS
Raspbian, Android, ArchLinux, FreeBSD, Fedora, RISC OS
Ubuntu 14.04 + OpenGL ES + OpenCL
on Kernel LTS 3.10, Android 4.4.2 con
Ker-nel LTS 3.10 Consumo
mA / V 210-460 mA @ 5V 150-350 mA @ 5V 1000mA @ 5V
GPIO 65 Pines I/O 8 Pines I/O 28 Pines I/O
Puertos
1 USB Host, 1 Mini-USB Cliente, 1 10/100 Mbps
Ethernet
2 USB Hosts, 1 Micro-USB Ali-mentación, 1 10/100 Mbps
Ethernet
1 USB 3.0 OTG, 4 USB 3.0 Host , 1 10/100
Mbps Ethernet
31
6.
ESPECIFICACIONESE esta se ió se des i e uáles so las a a te ísti as del siste a, a i el de ha d a e soft a e, pa ti ula e te el uad oto utilizado, el siste a de o t ol de ajo i el, el siste a de o t ol de alto i el ju to o los o po e tes isió la platafo a de ate izaje.
. . Ha d a e del uad oto
El uad oto usado e este p o e to se o o e o o A du opte , fue ad ui ido e la tie da de la e p esa DRo oti s, uie es so los eado es de A dupilot. Este uad oto
ue ta o las siguie tes a a te ísti as p i ipales.
Fig. .Quad oto A du opte X DRo oti s3.
oto es ushless out u e de K AC E“C ele t o i speed o t ol de A o fi a e “i o k, P oppelle s X push pull Chasis e alu i io “e so GP“ u- lo LEA- H GP“ o o pas a u a f e ue ia de Hz
Radio pa a tele et ía a Mhz
Bate ía de polí e o de litio de Ah Peso total . Kg, apa idad de a ga g
Fig. . Diag a a de e t adas salidas ge e al del siste a de uelo
[image:31.612.235.379.549.663.2]
32 . . Co t ol de ajo i el
Co o se des i e a te io e te se usó el o t olado de D o oti s lla ado A dupilot o APM, el ual es u siste a de o t ol pa a u uad oto asado e a dui o. Esto pe ite u a g a posi ilidad de adapta ió del o t ol a las a a te ísti as pa ti ula es de ada p o e to. E t e sus p i ipales a a te ísti as se e ue t a :
Fig. . Co t olado A dupilot APM . DRo oti s4
Co pati le o a dui o, Mi o o t olado At ega de At el Gi os opio a ele ó et o MPU- de ejes
Ba ó et o M“ - BA de alta esolu ió Co pas digital HMC L-TR de ejes
MB de al a e a ie to O -Boa d pa a logs de uelo, pue to U“B E t adas/“alidas digitales, “alidas PWM pa a oto es ushless Ca ales de e t ada pa a e epto odos de uelo5 usados
P oto olo de o u i a ió Ma li k
Fig. . Diag a a de e t adas salidas ge e al del siste a de uelo
4 3DRobotics Autopilot (3DRobotics, 2013)
5 Modo TAKEOFF: Despegue autónomo, Modo GUIDED: Desplazamiento mediante coordenadas GPS,
[image:32.612.197.411.177.316.2]33 6.3. Co t ol de alto i el
Co t ol P i ipal.
Basado e la pla a Beagle o e la k el o t olado de alto i el es apaz de ea u a ie te te desa ollo edia te la i ple e ta ió de u siste a ope ati o Li u asado e el ke el . . E t e sus p i ipales a a te ísti as se desta a .
Fig. . BeagleBo eBla j de Te as I st u e ts6
P o esado ARM Co te -A AM X a GHz o MB de e o ia RAM GB de al a e a ie to O - oa d pue to pa a ta jeta u“D
Li u Ke el . , Pue to U“B . odo lie te, Co e to de Red RJ- / “alida HDMI, UART, GPIO, pue to “PI, I C
Li e ías de isió Ope CV
P oto olo Ma li k pa a o u i a ió o A dupilot Co su o - A@ V Peso de g
Fig. . Diag a a e t adas salidas ge e al del siste a de o t ol asado e BBB
[image:33.612.132.479.468.654.2]
34 Cá ara a ordo
Fig. . Logite h HD P o U“B We a C
I te faz U“B . o o p esió e fo ato MJPEH H. Auto e fo ue, Le tes Ca l-)eiss
6.4. Platafo a de ate izaje
E esta se ió se da a o o e uáles so las a a te ísti as de la platafo a, ó o se defi e lo ue el siste a de isió de e dete ta o o platafo a de ate izaje.
E p i ipio pa a ue el siste a de isió te ga fa ilidad de dete ta la platafo a se diseñó u a o di e sio es e ta gula es, ap o i ada e te de de la go po de a ho. La platafo a se e u e o u a lá i a oja se u i a e u e to o do de este olo te ga u ue o t aste o espe to al edio. La apa idad de e ia las oo de adas po GP“ se log a edia te el uso de u a ie te de desa ollo Li u o las li e ías de o u i a ió pa a APM lla adas Ma li k. De ido a ue este tipo de li ea ías es fu io al ajo u a ie te De ia , se usó u siste a e e ido o el ue se o ta a e el o e to de ealiza ió del p o e to, el ual es Rasp e Pi, ue ju to o u ódulo de e ep ió GP“ U“B u e la e ifi es apaz de e ia las oo de adas GP“ al uad oto .
Fig. . Co po e tes de la platafo a de ate izaje, Platafo a Li u Rasp e Pi7,
Modulo WIFI UWN 8 Módulo GP“ ND- “9
[image:34.612.237.371.102.169.2]
35 6.5. Diag a a ge e al del siste a
El siste a ge e al está o fo ado po su siste as, los uales i te a túa e t e sí pa a ealiza la a ió deseada. El siste a de e segui etapas p i ipales pa a log a el o jeti o pla teado.
[image:35.612.101.516.275.587.2]36 Fig. . Diag a a ge e al del siste a p opuesto
E la figu a se o se a u diag a a ge e al del siste a i ple e tado. El o t olado se o- isual e i e las oo de adas GP“ de la platafo a ó il edia te u e la e ifi, la i fo a ió p o esada po la á a a pa a e ia los o a dos de o t ol a A dupilot uie se e a ga de eje uta la a ió so e el uad oto . El p o eso ue des i e el siste a se di ide e etapas fu da e tales:
1. Etapa - Despegue:
Media te las fu io alidades de A dupilot se ealiza el despegue, el ual po defe to está pa a et izado pa a ele a al uad oto a u a altu a e t e
2. Etapa - Desplaza ie to:
[image:36.612.85.535.68.460.2]37 uad oto edia te la o e ió ifi. BeagleBo e Bla k i te p eta la i fo a ió GP“ a tie e el odo de uelo de A dupilot e GUIDED el ual pe ite al uad oto segui u a posi ió GP“ deseada. U a ez el uad oto se despla e hasta la platafo a se o lu e la etapa de desplaza ie to el o t olado isual to a el o t ol del uad oto .
3. Etapa - Segui ie to ópti o:
El o t olado isual está a ti o e todas las etapas des itas po el uad oto . Cua do se dete ta la platafo a e tie a se ha e u a io e el odo de uelo, de GUIDED a POSHOLD, el ual i te ta a te e al uad oto e u pu to fijo e el ai e. Este pu to fijo está dado po el pu to GP“ justo ua do se a ti a el odo PO“HOLD.
4. Etapa – Aterrizaje
U a ez el uad oto al a za la platafo a de ate izaje se p o ede a ealiza el ate izaje. E este p o eso el odo LAND se a ti a, el ual ge e a u desplaza ie to e ti al ha ia a ajo, a te ie do la posi ió GP“ desde do de fue a ti ado, a u a elo idad po defe to de /s.
38
7.
DESARROLLOSE el o te to de este p o e to es i po ta te i ple e ta dos e a is os de uelo. El p i e o o siste e e alua el o po ta ie to del uad oto ua do i te ta ate iza so e u a platafo a fija e tie a ie t as ue la segu da o siste e ate iza el uad oto so e la platafo a e o i ie to. Pa a a os asos, el es ue a de o t ol es el is o, a ue lo ue se pla tea e la se ió . es u siste a de o t ol isual apaz de e ia o a dos de elo idad al uad oto pa a log a e t a la platafo a e el e t o de la i age ate iza , esto ha e posi le a ue el o t ol sea apaz de e t a sie p e la platafo a a pesa de ue ésta se esté o ie do.
. . “iste a de o t ol de uelo
E el siste a de o t ol de uelo fue e esa io ealiza algu os ajustes a i el de ha d a e soft a e pa a pode u ifi a lo o el o t olado isual. Pa a esto, o o se e io a a te io e te, se hizo uso de los pue tos se iales UART de ada u o de los dispositi os pa a ealiza la o u i a ió e t e ellos. “e i te o e ta o la UART de tele et ía de A dupilot o la UART de BeagleBo e Bla k, g a ias a esto es posi le t a s iti i fo a ió desde ha ia el o t olado de uelo. Adi io al a lo a te io fue e esa io i ple e ta u e a is o ue pe ita i te p eta toda la i fo a ió efe e te a se so es, IMU, GP“ et . desde el o t olado de uelo. Pa a esto se usó el p oto olo MAVLi k Mi o Ae ialVehi le Li k , el ual o siste e u a se ie de i st u io es ue puede se i te p etados eje utados po u a g a a iedad de
o t olado es de uelo. “e e o ie da al le to di igi se a la pági a ofi ial Meie , pa a te e u a efe e ia ás a plia del p oto olo. G a ias a este p oto olo fue posi le i ple e ta u a uti a e BBB ue pe ita lee la i fo a ió e i ida a t a és de la UART de odifi a la o MAVLi k.
A dupilot posee g a a iedad de odos de uelo, ue pe ite a uad oto espo de de dife e tes a e as. E este p o e to se hizo uso de t es odos de uelo p i ipal e te.
Modo TakeOff: E este odo el o t olado ge e a u despegue o t olado, asado e la posi ió GP“ de pa tida, es de i , A dupilot to a o o efe e ia la posi ió GP“ a tes de despegue e i te ta a te e esta posi ió hasta al a za u a altu a p edete i ada po el usua io. U a e taja de este uelo es ue tie e la apa idad de a ti a de fo a pa alela el u odo de segui ie to GP“ lla ado GUIDED ie t as el uad oto despega.
Modo Guided: E este odo A dupilot es apaz de i te p eta u a posi ió GP“ e iada po u siste a e te o di igi el uad oto hasta di ha posi ió .
39 e uelo, esto uie e de i ue se ajusta o sta te e te los á gulos de Roll, Pit h, Ya la p opulsió de los oto es o o ida o o Th ottle. “e puede o side a ue este odo o o uelo esta io a io de t o de todos los es ue as de o t ol pla teados se supo e
ue el uad oto se a tie e esta le so e u pu to del espa io.
Modo La d: E este odo el o t olado de uelo to a o o efe e ia la posi ió GP“ ua do el odo se a ti a e i te ta ealiza u ate izaje a /s. Po ot o lado o e iste u odo de uelo ue pe ita ealiza u despegue o t olado hasta u a altu a i di ada, si e a go puede ealiza se g a ias al p oto olo MAVLi k. Pa a este aso lo p i e o es a ti a el odo PosHold e tie a, poste io e te e ia u o a do pa a i e e ta la pote ia de los oto es o la a uda de BBB o ito ea la altu a del uad oto . U a ez se al a e la altu a deseada se a tie e la pote ia de los oto es esta le se deja ue el o t ol de uelo a te ga al uad oto g a ias al odo PosHold.
G a ias a los odos des itos a te io e te, se defi e el algo it o ue el o t ol de uelo ue de e lle a a a o el uad oto pa a ealiza el ate izaje so e u a platafo a e tie a.
[image:39.612.95.490.331.649.2]40 E la figu a se des i e el p o eso i ple e tado e el o t ol de uelo pa a ealiza el ate izaje so e la platafo a. E p i ipio el o t ol i i ializa la ali a ió de se so es e i fo a ua do el p o eso o lu e, u a ez he ho esto se a ti a el odo PosHold se au e ta g adual e te la señal ue o t ola la pote ia e los oto es a t a és de MAVLi k. A tes de despega se to a o o efe e ia la altu a de despegue pa a te e u a efe e ia al o e to de ate iza , es de i pa a sa e uá do el uad oto ha ate izado ate iza si altu a fi al es ap o i ada e te igual a altu a fi al . La e ep ió de oo de adas GP“, p o e ie tes de la platafo a e tie a se a tie e a ti a hasta ue el uad oto dete ta la platafo a. U a ez esta posi ió es al a zada el siste a de isió ha dete tado la platafo a se p o ede a a ti a el des e so edia te el odo La d.
. . “iste a de o t ol isual
Este o t olado e t a a afe ta di e ta e te la e tapa e la ual el uad oto i i ia el des e so ha ia la platafo a de ate izaje. El o t olado isual a ti a el odo La d ua do la platafo a se dete ta. E este pu to el o t olado isual e ía o a do de elo idad e las oo de adas X Y asado e el siste a de efe e ias del uad oto pa a i te ta a te e e t ada la platafo a de ate izaje ás i fo a ió e la se ió
. . . E este aso el o t olado isual des i e el siguie te algo it o.
[image:40.612.177.440.360.684.2]41 7.3. Platafo a de ate izaje
Fi al e te la platafo a de ate izaje es la e a gada de guia al uad oto hasta el pu to do de de e des e de . Pa a esto se ge e a u a o e ió a t a és del p oto olo MAVLi k e t e Rasp e Pi A dupilot edia te u a ed WIFI. La platafo a ue ta o u se so GP“ ue pe ite dete ta su posi ió , la ual es t a sfo ada e pa uetes MAVLi k e iada al o t olado del uelo del uad oto A dupilot .
[image:41.612.242.348.196.480.2]42
8.
ANÁLISIS DE RESULTADOSE esta se ió se da a o o e el p o eso de p ue as lle ado a a o. P i ipal e te se e fo a e a aliza ué ta ue a esulta la o e ió de la posi ió GP“ del Quad oto ua do se usa el o t ol se o isual. Pa a esto se e ía desde la esta ió de tie a la oo de ada GP“ a la ual el Quad oto de e di igi se, u a ez u i ada, el o t ol de alto i el di ige el Quad oto hasta la posi ió deseada u i a do o la á a a la platafo a de olo ojo.
Fig. . Quad oto di igié dose ha ia la posi ió GP“ de la platafo a de ate izaje
[image:42.612.103.510.225.474.2]43 Fig. . Des ip ió de las etapas o fases de uelo u plidas po el uad oto .
E la figu a se o se a u a etapa de despegue, e la ue el uad oto to a altu a, seguida de u a etapa de desplaza ie to ha ia la posi ió GP“ de la platafo a, fi al e te las etapas de des e so ate izaje do de el o t ol se o isual ajusta la posi ió del uad oto pa a log a ate iza so e la platafo a.
[image:43.612.61.553.79.418.2]44 Fig. . G áfi o de los á gulos Roll Pit h desde el despegue hasta el ate izaje so e la platafo a. La des ip ió de los odos de uelo e la figu a de Roll des i e los estados
eje utados po el siste a de a ue do a los e e tos aptu ados po el o t olado se o isual. E la pa te i fe io se o se a las i áge es aptu adas po el siste a
[image:44.612.41.581.79.579.2]45 E la figu a se o se a el o po ta ie to de los á gulos de Roll Pit h ua do se eje uta u desplaza ie to guiado po GP“ hasta la platafo a, u a esta iliza ió del uad oto de la i age aptada u des e so o t olado. E p i e a i sta ia el uad oto despega desde su posi ió i i ial, eje uta la se ue ia ue pe ite se guiado po la platafo a de ate izaje uie e ía su oo de ada GP“, u a ez posi io ado so e la oo de ada dete tada la platafo a se a ti a el odo PosHold ue pe ite a te e el uad oto e u a posi ió esta le so e la platafo a. U a ez se dete ta la platafo a po u pe iodo de segu dos se da i i io al des e so, Modo La d, do de a edida ue el uad oto dis i u e su altu a, el o t ola se o isual i te ta a te e la platafo a e t ada pa a de esta fo a ealiza u ate izaje e itoso.
Fig. . Co po ta ie to de la altu a e todas las etapas del p o eso despegue
-ate izaje .
[image:45.612.59.562.272.501.2]46 lo ue puede llega a des o pe sa la altu a del uad oto ie t as se adapta a la pé dida. Poste io a esta des o pe sa ió el o t olado de ajo i el o pe sa la pé dida de altu a hasta ue el o t olado se o isual dete ta la a a da i i io al des e so ha ia la platafo a. “e puede o se a ue la altu a fi al es a o a la altu a i i ial, esto e o se ue ia de ue el uad oto ha ate izado so e la platafo a
[image:46.612.37.577.159.651.2]47 E la figu a se o se a ó o se afe ta las elo idades e los ejes ho izo tales e ada etapa del p o eso de ate izaje. Al i i ia el despegue la elo idad e au e ta o side a le e te, de ido a ue se da i i io al desplaza ie to ha ia la platafo a de ate izaje, a uí se o se a ue la elo idad e o se e afe tada o side a le e te, es de i el uad oto a tie e u desplaza ie to ap o i ada e te li eal ha ia la platafo a de ate izaje. Cua do se llega hasta la oo de ada GP“ de la platafo a se eje uta el odo PosHold pa a poste io e te da i i io a la se ue ia de ate izaje. Cua do se eje uta este odo se o se a ue la elo idad e se ajusta de u a a e a ás ag esi a ue la elo idad e , esto se de e a ue el o t ol IBV“ log a esta iliza la i age de la platafo a de ate izaje aptada po la á a a e el eje Y, pe o de e ajusta o sta te e te la posi ió e el eje X pa a a te e e t ada la i age . A edida ue se a e a al pu to de ate izaje, las elo idades se ajusta o e o i te sidad de ido a ue la i age de la platafo a tie e a esta sie p e e t ada. Fi al e te las el uad oto ate iza lle a do las elo idades e los ejes X Y a e o.
[image:47.612.47.554.306.656.2]48 E la figu a se o se a ue el uad oto ealiza u desplaza ie to ha ia la oo de ada GP“ e iada po la platafo a de ate izaje, justo ua do éste se posi io a so e ésta el o t olado IBV“ o ie za a ajusta la posi ió del uad oto pa a i te ta a te e la platafo a e t ada, esto se o se a e el o ju to de pu tos GP“ eje utados hasta o lui o el ate izaje. Pode os o se a ue ua do la platafo a de ate izaje es dete tada se da i i io al des e so la posi ió ep ese tada e la oo de ada de latitud se a tie e si a ios ag esi os ie t as ue e la lo gitud los, ajustes de la posi ió so ás e ide tes.
Al ealiza u a o pa a ió e t e la eje u ió de la p ue a o , si el o t olado IBV“ pode os e alua la o e ió dada po el o t olado a la posi ió GP“ del uad oto .
Fig. . Co pa a ió del posi io a ie to GP“ ealizado po el uad oto o si o t ol se o isual.
E la figu a se o se a ue e ause ia del o t ol se o isual el uad oto des i e u a t a e to ia egula hasta llega a la posi ió ue e ía la platafo a, u a ez llega a ella i i ia el des e so, do de se p ese ta u dese uili io de la posi ió a ue el Modo La d, o o se e pli a e la se ió , el A dupilot i te ta a te e la posi ió GP“ ue se dete tó justo ua do se a ti a el odo La d, de ido al e o e el GP“ la posi ió del uad oto o espe to a la platafo a se e afe tada, ie t as ue si el o t olado isual ajusta los á gulos Roll Pit h la t a e to ia des ita t ata de ap o i a se ás a ate iza e la platafo a. G a ias a esto se o se a ue el o t ol se o isual sí o ige la posi ió GP“ del uad oto , esto se e ide ia e la a tidad de oo de adas ue se o se a e la figu a o IB“V a ue o ti ua e te el o t olado isual, ajusta la posi ió del uad oto , lo ue se t adu e e ás oo de adas GP“ des itas po el
[image:48.612.25.589.254.449.2]49 Pa a ealiza u a alida ió ás p e isa del o po ta ie to del uad oto o IBV“ si IBV“ ealiza os u a o e sió de los datos lo gitudi ales latitudi ales a la es ala ét i a al ula la dista ia e t e la oo de ada GP“ del uad oto la oo de ada GP“ de la platafo a. Pa a ealiza este p o eso se usó la des ip ió pu li ada e Ve ess,
� � � = � �� ∗ � ∗
+ ∗ ∗ −
Fig. . E o e t e la dista ia e t e el uad oto la platafo a de ate izaje desde el despegue hasta el ate izaje usa do IBV“. E o Cuad áti o Medio EMC = ,
[image:49.612.37.583.252.499.2]50 Fig. . E o e t e la dista ia e t e el uad oto la platafo a de ate izaje desde el
despegue hasta el ate izaje si usa IBV“. E o Cuad áti o Medio EMC = ,
E este aso es ás e ide te ue la p ue a ealizada o el o t olado se o isual es ás efi ie te a ue log a i i iza el e o de posi ió e t e el uad oto la platafo a lo ue se t adu e e ate iza so e la platafo a, ie t as ue e la p ue a ealizada si IBV“ el e o se i i iza e p opo io es si ila es al de la Fig. si e a go el e o se esta iliza e u alo a o a e o, esto sig ifi a ue el uad oto se o log a ate iza so e la platafo a, lo ue os o fi a el efe ti o fu io a ie to del o t ol se o isual al o pe sa la posi ió GP“ e iada po la platafo a de ate izaje al
[image:50.612.45.541.76.305.2]51
9.
CONCLUSIONESE el desa ollo e i ple e ta ió del o t olado isual se o lu e ue es a e tado usa u las salidas de o t ol asadas e la elo idad de t a sla ió e los ejes, a ue esto ha e los o i ie tos t asla io ales sea sua es, de tal a e a ue la á a a o se ea afe tada o las i a io es ge e adas po el uad oto al desplaza se e el espa io.
U o de los pu tos a o side a e este p o e to si duda es la apa idad de p o esa ie to del o t olado isual a ue o stitu e u a li ita te u i po ta te. La apa idad de p o esa ie to a o do se defi e e u aspe to fu da e tal; FP“ F a es Po “egu do , esta a a te ísti a os da u a idea de ué ta ue o puede llega a se el o t olado isual. E t e a o sea la apa idad de p o esa ie to del o t olado isual, a o es la efi ie ia del algo it o i ple e tado a ue el o t olado puede p o esa las i áge es o a o fluidez espo de a los a ios aptados po la á a a o a o apidez. E las p ue as del o t olado isual se o se ó ue éste tie e u a espuesta de a FP“, u a elo idad de p o esa ie to a epta le pa a u a platafo a o o BBB, si e a go lo ideal e este tipo de o t olado es es te e la i fo a ió del e to o ta ápido o o sea posi le. Ta ié la á a a es u a li ita te, a ue la apa idad de ajusta se a las o di io es de lu i osidad edi e el F a eRate ue es apaz de p o esa .A pesa de la apa idad de p o esa ie to li itada, el o t olado espo de de a ue do a lo espe ado log a o t ola el uad oto de a e a p e isa ajo ópti as
o di io es de lu i osidad li atológi as.
El F a eRate afe ta al o e to de esta iliza la i age de la platafo a e el e t o del pla o, esto se e ide ia e los o ti uos a ios de posi ió de la Fig. o IBV“, a ue o u F a eRate supe io se pod ía o segui alo es e os dispe sos, lo ue se t adu e e o i ie tos ás sua es, a ue la dife e ia de posi ió e t e u f a e a tes u o después ha e ue el o t olado se o isual de a ajusta la posi ió del uad oto de a e a us a pa a a te e e t ada la platafo a.
“e o se a ue el o t olado se o isual, a uda a o egi la posi ió GP“ del siste a, si e a go, el esultado espe ado o es de a ue do a lo espe ado, a ue ua do o se usa el o t olado se o isual, la posi ió del Quad oto al ate iza , o espe to a la posi ió del uad oto al ate iza o a uda del o t olado se o isual so u e a as, lo ue os da a e te e te de ue e e te io es, el GP“ o es ta i p e iso, depe de de u has o di io es, li atológi as, uido p odu ido po ot os siste as o o a te as ue pueda afe ta el dese peño. Po lo ta to te ie do u a u ue espa io de p ue a, fue a de i te fe e ias ele t o ag éti as, el GP“ tie e u dese peño
52
10.
BIBLIOGRAFÍADRo oti s. de de . APM . set. O te ido de DRo oti s: http://sto e. d o oti s. o /p odu ts/ap - - -kit-
As e di g Te h ologies. de de . as te . O te ido de As e di g Te h ologies: http:// .as te .de/e /ua -uas-d o e-p odu ts/as te -hu i g i d/
Boua dallah, P. M. . Desig a d Co t ol of a I doo Mi o Quad oto . IEEE I t. Co f.
o Ro . a d Auto at., olu e págs. – . Ne O lea s, U“A: IEEE.
Chau ette, F. a. . Visual se o o t ol. I. asi ap oa hes. Ro oti s a d Aito atio
Magazi e , - .
Co ke, P. . Visual Co t ol of Ro ots: high pe fo a e isual se oi g. Aust alia: Resea h “tudies P ess LTDC“IRO. Di isio of Ma ufa tu i g Te h olog .
Glo alsat P odu ts. de de . O te ido de Glo alsat:
http:// .glo alsat. o .t /p odu ts
-page.php? e u= &gs_e _p odu t_id= &gs_e _p odu t_ t_id=
Hut hi so , “. H. . A tuto ial o isual se o o t ol. T a sa tio o Ro oti s a d
auto atio olu e , - .
H o Li , J. P. de de . Build ou o uad oto . O te ido de Ope -“ou e P oje ts o U a ed Ae ial Vehi les:
http:// i a dof . o / s/atta h e ts/a ti le/ / uild- ou -o - uad oto .pdf
I st u e ts, T. de de . eagle oa d. O te ido de BeagleBo e Bla k: http:// eagle oa d.o g/ la k
I á F. Mo d agó , P. C. . D O je t follo i g ased o isual i fo atio fo U a ed Ae ial Vehi les. The Lati A e i a Ro oti s Co petitio LARC . Bogotá, Colo ia.
José Luis, R. L. . Real-ti e lo alizatio of a UAV usi g Kal a filte a d a Wi eless “e so Net o k. Jou al of i tellige t & Ro oti “ ste , Vol. - .
K. E. We zel, A. M. . Auto ati Take Off, T a ki g a d La di g of a Mi iatu e UAV o a Mo i g Ca ie Vehi le. Jou al of I tellige t & Ro oti “ ste s Vol. , - .
Logi “uppl . de de . Wi eless adapte u . O te ido de logi suppl : http:// .logi suppl . o / o po e ts/ et o ki g/ i eless/u /
Loza o, R. ). . “ta ilizatio of a heli opte usi g opti al flo . Ele t i al E gi ee i g
53 págs. - . Me ida Cit : IEEE.
Meie , L. de de . QG ou dCo t ol. O te ido de Ma li k P oto ol: http:// g ou d o t ol.o g/ a li k/sta t
Mo d agó , I. . O - oa d isual o t ol algo ith s fo U a ed Ae ial Vehi les. Mad id, España: U i e sidad Polité i a de Mad id.
Moses Ba gu a, R. M. . No li ea D a i Modeli g fo High Pe fo a e Co t ol of a Quad oto . Vi to ia U i e sit of Welli gto . Ne )eala d: P o eedi gs of
Aust alasia Co fe e e o Ro oti s a d Auto atio .
Raffo, G. V. . Modelado o t ol de u heli ópte o uad oto . “e illa: U i e sidad de “e illa.
Rasp e Pi. de de . The asp e pi o g. O te ido de Rasp e Pi: http:// . asp e pi.o g/
Real, C. N. . Co t ol de u Quad oto edia te la platafo a A dui o. U i e sidad polité i a de Cataluña.
“a tos, M. . I tellige t fuzz o t olle of a uad oto . Mad id, “pai : Fa . de I f., U i . Co plute se.
“k z pietz, T. . U a ed Ai aft “ ste s fo Ci ilia Missio s. B a de u g I stitute fo “o iet a d “e u it .
u- lo . de de . u- lo . O te ido de P odu ts GP“ G HW: https:// .u -lo . o /i ages/do -loads/P odu t_Do s/LEA- _P odu t“u a _% GP“.G -HW
Ve ess, C. de de . pea so . Re upe ado el de de , de Latitude, Lo gitude a d G eat Ci les: http:// lue . logspot. o / / /e el-fo ula-to
-al ulate-dista e.ht l
54
11.
ANEXOSA e o . Código o t ol Visual
fromsubprocess import Popen, PIPE, STDOUT
from droneapi.lib import VehicleMode frompymavlink import mavutil
importAdafruit_BBIO.UART as UART import time
importos import cv2 import sys import serial
importnumpy as np
#---#
#---Functions---#
#---#
def delay(seconds):
global control5 globaltimesleep global entrada global ReffTime3
ok = 0
if control5 != 1:
if entrada == 0:
ReffTime3 = time.time() entrada = 0