DESPLAZAMIENTO DE ROBOTS MÓVILES EN FORMA DE CONVOY
DISPLACEMENT OF MOBILE ROBOTS IN THE FORM OF A CONVOY
Brayan H. Ramirez Willson I. Moreno**
Resumen: Este proyecto presenta un sistema de tres plataformas móviles (un maestro y dos
esclavos) construidas con LEGO MINDSTORMS NXT 2.0. Que se desplazan en forma de
convoy sin alguna ruta establecida. Por medio del robot maestro se definen un par de
coordenadas donde, calcula la dirección y orientación para acercarse al punto final,
manteniendo una comunicación Bluetooth que establece en tiempo real cual esclavo está
dentro o fuera del convoy que implementa sistemas de percepción y actuación la formación
evade un obstáculo que está definido dentro de un entorno controlado. Dando como
resultado la generación de la formación en convoy en varios recorridos.
Palabras clave: comunicación bluetooth, convoy, LabVIEW, LEGO NXT, robótica.
Abstract: This project presents a system of three mobile platforms (one master and two
slaves) built with LEGO MINDSTORMS NXT 2.0. That they move in the form of a convoy
without any established route, through the implementation of perception and action systems
allow them to approach a final point with in a controlled environment, maintaining a bluetooth
communication, where the master robot establishes in real time which slave is inside or
outside the formation. In this way, demonstrate alternatives for the development of formations
in groups of robots through a dependency.
Keywords: Bluetooth communication, convoy, LabVIEW, LEGO NXT, robotics.
Estudiante Tecnología Electrónica. Universidad Distrital Francisco José de Caldas Correo electrónico e-mail:
**ingeniero en control electrónico. Universidad Distrital Francisco José de Caldas, Magister en electrónica y
1 Introducción
En la última década, se ha despertado un gran interés por controlar los vehículos robóticos
de manera similar a un convoy, donde cada vehículo sigue el camino recorrido por el
automóvil anterior a una distancia de separación deseada. Este escenario es muy útil en el
caso de convoyes militares, convoyes de vehículos comerciales o en el transporte público
urbano. [1], [2]
Por ende, este proyecto esta direccionado a demostrar la capacidad de formación en convoy
de tres plataformas móviles (un maestro y dos esclavos) construidas con el kit de LEGO
MINDSTORMS NXT 2.0, que realizan varios recorridos sin alguna ruta establecida, evitando
un obstáculo ubicado dentro de un entorno controlado tratando de llegar a un punto final. A
su vez establecen una comunicación Bluetooth en tiempo real por medio del robot maestro
conociendo si los esclavos están dentro o no de la formación.
Siendo presentado mediante evidencias experimentales realizados para observar su
velocidad, rango, error promedio, desviación estándar y error acumulativo, de esta forma,
comparar los datos simulados con los resultados reales.
2 Descripción
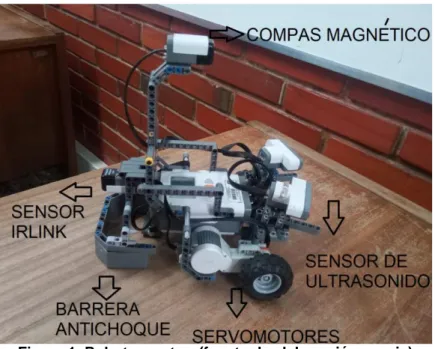
Robot maestro: Este se caracteriza por dirigir la formación en convoy hasta el punto final
por medio de un sensor compas magnético que envía datos para orientar al robot, una
barrera anti choqué para que el robot esclavo no colisione contra este, un sensor IRLINK
para enviar señales infrarrojas, un par de motores para desplazarse y dos sensores de
Figura 1. Robot maestro. (fuente de elaboración propia)
Robots esclavos: estos se caracterizan por incorporarse o salir de la formación, utilizando
dos sensores IR SEEKER en su parte delantera para percibir señales infrarrojas, un sensor
ultrasonido para evitar colisiones contra el robot que este delante y dos servomotores para
desplazarse, donde el esclavo 1 se diferencia por tener un sensor IR LINK en su parte
trasera para enviar señales infrarrojas y una barrera anti choqué, como se muestra en la
figura 2.
Entorno controlado: Se caracteriza por tener dos secciones, la primera con un tamaño de
180cm x 270cm, de color blanco, marcado con líneas negras a su alrededor demostrando
sus límites y la segunda con medidas de 153cm x 160 cm, donde los sensores infrarrojos no
se ven afectados por altos niveles de luz solar, luz blanca o en la obscuridad en donde se
realizan las pruebas en la mañana y tarde siendo el mejor tiempo para que la formación de
convoy trate de completar el recorrido, como se muestra en la figura 3.
Figura 3: Entorno controlado (fuente de elaboración propia)
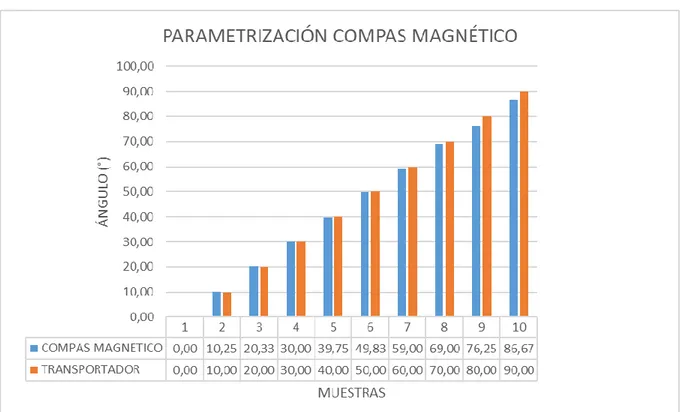
Compas magnético: Este sensor se caracteriza por enviar información al robot maestro
para determinar el ángulo en el que se encuentra, en la figura 4 se puede observar la
Figura 4. Parametrización del sensor compas magnético. (fuente de elaboración propia)
Se realiza un promedio de 11 muestras para 10 ángulos diferentes, los datos del sensor (Cm)
se identifican en la barra izquierda y se comparan con los del transportador (T) en la barra
derecha. Como resultado, la suma de errores (1) de los ángulos es 8%.
(1)
Sensor de ultrasonido: Su función es poder enviar información de distancia para cada robot
y de esta forma evitar colisiones, este sensor detecta objetos de 0 a 255 cm de distancia con
una precisión aproximada de 3 cm. Esto significa que, si hay un objeto a 40 cm, el sensor
puede verlo desde 37 hasta 43 cm, siendo este su margen de error. [3]
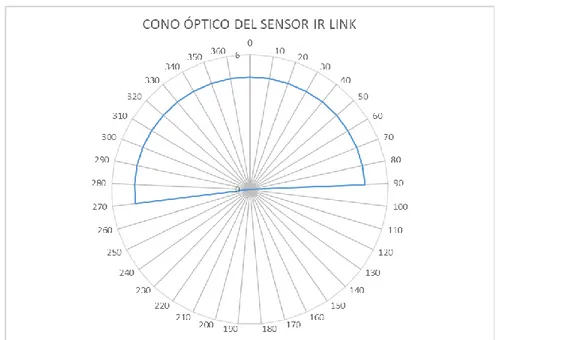
Sensor IRLINK: Es utilizado en los robot maestro y esclavo 1 para emitir señales infrarrojas
y de esta forma poder comunicarlos para realizar la formación en convoy, en la figura 5 se
Figura 5. Parametrizacion sensor IR LINK. (fuente de elaboración propia)
Se realizan varias muestras del sensor IRLINK en angulos desde -100° hasta 110°, donde se
observa la detección del sensor IR SEEKER en un valor lógico, y de esta forma conocer el
rango aproximado para conservar la formación en convoy.
Sensor IRSEEKER: Detecta fuentes infrarrojas como las procedentes del sensor IR LINK,
los mandos de la TV, los propios mandos PF, etc. Muestra la dirección desde donde se emite
la señal. [4], [5] En la figura 6 se muestra la parametrización del sensor IR SEEKER.
Se realizarón varias muestras del sensor IR SEEKER en ángulos desde -90° hasta 90°,
donde se observa su detección en un valor lógico, y de esta forma conocer el rango
aproximado para mantener la formación en convoy.
Servomotores: Proporcionan al robot la capacidad de moverse. Controla los movimientos,
ya que disponen de un sensor de rotación que mide en precisión de un grado. [6]
Ladrillo NXT: Es el cerebro de los robots que por medio de la lectura de los sensores ejecuta
toma las decisiones para que estos ejecuten los movimientos que harán dentro del entorno
controlado, manteniendo una comunicación Bluetooth con 3 dispositivos en tiempo real. [7]
3. Metodología y resultados
La generación de la formación en convoy en donde cada robot sigue el camino recorrido por
el anterior a una distancia de separación deseada, [8] relaciona dos problemas
fundamentales; el primero consiste en garantizar que el robot maestro evada obstáculos y se
aproxime al punto final a partir de los parámetros físicos del robot. [9], [10] El segundo
consiste mantener una comunicación bluetooth en tiempo real para establecer cual robot está
dentro o fuera de la formación con ordenes establecidas por el maestro, de esta manera se
muestra la importancia que tiene el robot maestro dentro de la formación en convoy.
Las plataformas móviles fueron desarrolladas basadas en la configuración diferencial, en
donde los movimientos en un plano están dados por la ecuación (2). Este vector define la
ubicación en un espacio 2D que representan la dirección y orientación de la plataforma,
mostrado en la figura 7.
Figura 7. Esquema de una plataforma diferencial en el espacio.[9]
Una primera aproximación para el modelo cinemático de las plataformas diferenciales, es
tomando como base los estudios realizados por diversos autores, donde se utilizan las
siguientes ecuaciones.[9], [11], [12]
(3)
(4)
Donde es la velocidad angular, la velocidad lineal, y son las velocidades de las
llantas teniendo en cuenta algunos aspectos físicos de la plataforma móvil, siendo el eje de
tracción (15 cm), el radio de cada rueda (2.6 cm) y la medida registrada por cada encoder de
los servomotores NXT. Así se determina una expresión general con las variables
anteriormente mencionadas, siendo la distancia lineal de cada motor, dependiendo de
que es el ángulo proporcionado por cada encoder generando la siguiente ecuación. [11]
(5)
Utilizando la nueva ecuación se presenta el desplazamiento total de la plataforma en una
expresión general de forma vectorial aplicando todas las constantes proporcionadas por la
(6)
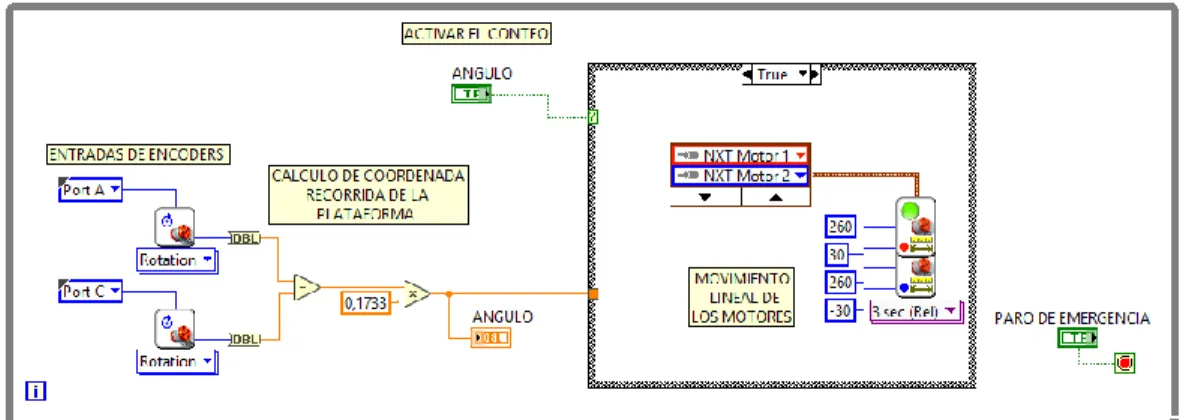
Al calcular, se obtuvo una constante física (0.0226) la cual se implementó para el algoritmo
de distancia lineal recorrida por la plataforma maestro, implementado en LabVIEW®
realizando un movimiento en línea recta con un pwm al 30% como se muestra en la figura 8.
[11]
Figura 8. Algoritmo de distancia lineal para la plataforma maestro, implementado en LabVIEW®. [11]
Como se observa en la figura 9, los valores adecuados para realizar el movimiento, son los
que están dentro del rango de 10 cm. Ya que presentan menor error promedio siendo del
0,46% y desviación estándar de 0,23%. Por tanto, su error acumulativo es mínimo dentro del
sistema, permitiendo que la llegada al punto final sea el más cercano a la coordenada
Figura 9. Error promedio y desviación estándar del movimiento lineal
A partir de (3) se puede modelar el desplazamiento angular de la plataforma, de esta forma
determinar la orientación final y sentido de giro, asociando el centro de gravedad,
representado en (7) donde es el eje de tracción de las ruedas.
(7)
Al calcular, se obtuvo una constante física (0.1733) la cual se utilizó en el algoritmo, ángulo
recorrido por la plataforma maestro, implementado en LabVIEW® realizando un movimiento
angular con un pwm al 30% como se representa en la siguiente figura. [11]
Como se puede observar en la figura 11, los valores adecuados para realizar el movimiento,
son los que están cercanos a 60°. Ya que presentan menor error promedio de 0,76% y
desviación estándar de 0,38%. Se tienen que evitar pequeños giros dentro del recorrido ya
que generan errores acumulativos en la trayectoria del robot.
Figura 11. Error promedio y desviación estándar del movimiento angular
Con base a los procesos realizados para validar los movimientos lineales y angulares, en la
ecuación (8) se presenta el modelo cinemático en una matriz para la plataforma maestro
donde φ relaciona el ángulo del compás magnético puesto que garantiza la orientación final
de la coordenada establecida. [11]
(8)
Por medio de las pruebas realizadas, se observó que el comportamiento del robot maestro es
apropiado para los ángulos de 0° a 90° ya que el sensor compas magnético se mantiene
estable en este rango. Al tener en cuenta este comportamiento se implementó un algoritmo
que calcula la posición actual y final de la plataforma, tomando en cuenta que este algoritmo
la trayectoria. De esta forma se realizan 32 recorridos, donde se toman 10 muestras por cada
uno y de esta forma observar el recorrido que este realizó, como se muestra en la figura 10.
Figura 12. Recorrido de robot maestro coordenada x = 130, y = 190. (fuente de elaboración propia)
En la figura 13 se puede observar el error sistemático del movimiento del robot que se
genera por los errores odómetricos como fricción al que se someten las ruedas a causa del
polvo y el error del sensor compas magnético, siendo comparados los datos reales y los
Figura 13. Error acumulativo robot maestro. (fuente de elaboración propia)
Al observar estos recorridos se obtienen diferentes ubicaciones finales del robot maestro,
mostrando los puntos teóricos que representan los cálculos realizados por el algoritmo y los
prácticos que representan la ubicación final del robot, de esta forma comparar los resultados,
como se muestra en la figura 13.
Al calcular la precisión, rango y desviación estándar se clasificaron 16 recorridos que
obtuvieron errores menores al 20% para que la plataforma cumpla con el objetivo de
aproximarse al punto final. Se implementa un algoritmo para evadir obstáculos donde por
medio de dos sensores de ultrasonido se determinó un rango de lectura para distancias
mayores a 10cm y menores a 30cm. Al detectar el obstáculo la plataforma gira 90° y avanza
20cm, por medio del algoritmo movimiento lineal y angular del robot maestro, se reestablece
la posición final.
Se realizan varias pruebas donde la plataforma maestro evade un obstáculo, que es ubicado
de tal forma que pueda ser detectado por el robot. En la figura 14 se observa el recorrido que
realiza el robot maestro, eludiendo un obstáculo de forma heptagonal que se ubicó en ciertas
marcaciones dentro del entorno controlado para evitar colisiones y trate de llegar al punto
final.
Figura 14. Recorrido robot maestro coordenada x = 140, y = 150 con obstáculo. (fuente de elaboración propia)
Al obtener estos puntos finales se calcula, la precisión, rango y desviación estándar, donde
infrarroja, con el sensor IRLINK, donde se configura la velocidad y frecuencia de transmisión
para enlazar los demás robots.
Se elaboró un algoritmo que, por medio de dos sensores IRSEEKER indican la dirección del
sensor IRLINK manteniendo una distancia de 10 cm hasta 20 cm para evitar colisiones entre
las plataformas donde por medio de un PID los robots esclavos siguen al maestro, como se
muestra en la figura 15.
Figura 15. Formación en convoy dentro de entorno controlado. (fuente de elaboración propia)
Al realizar la formación en convoy se hacen 90 pruebas de velocidad para cada robot
tomando un tiempo y por medio de (9) se calculó la distancia que separan los robots
dentro de la formación.
Donde el robot maestro tiene un pwm en los motores del 30%, y los esclavos una velocidad
alta con un pwm de 65%, las cuales son apropiados para el desplazamiento del convoy
tratando de mantener una distancia de 10cm hasta 20cm como se muestra en la figura 15.
Figura 16. Prueba de velocidad del convoy en coordenada X = 100, Y = 200. (fuente de elaboración propia)
Al verificar que los robots mantienen una distancia entre ellos, se realiza un algoritmo que
envía datos desde el robot maestro hacia los esclavos utilizando una comunicación
Bluetooth, que define cual entra en la formación, después de esto se verifica el por medio del
Display de cada robot cual integra o no el convoy.
Durante el recorrido se puede definir cuál esclavo sale de la formación, enviando información
utilizando comunicación Bluetooth desde el robot maestro, de esta manera demostrar el
abandono de la formación por parte de los robots esclavos.
3.Conclusiones y Trabajos futuros
Se ensambló y programó un sistema de tres robots móviles tipo diferencial con el kit
Lego, los cuales con ayuda de sensores proporcionan información para que se
desplacen en forma de convoy dentro de un entorno controlado alcanzando un punto
final establecido, manteniendo una comunicación Bluetooth donde el maestro
Por medio las características físicas del robot maestro, se conoce su posición actual,
con un error sistemático del 6% aproximándose a un punto final con un error promedio
del 20% y dos esclavos que se desplazan en forma de convoy, utilizando una
comunicación infrarroja donde los sensores IR LINK e IR SEEKER mantengan su
comunicación con ángulos desde -90° a 90°.
Al realizar las pruebas dentro de un entorno controlado se determina que los sensores
infrarrojos no se ven afectados por la luz solar, luz blanca y obscuridad desde las 8 am
hasta las 5 pm, donde la formación de convoy trata de completar el recorrido evitando
un obstáculo posicionado en diferentes recorridos.
Al realizar la parametrización en varios sensores se determinó, el error sistemático
para el robot maestro y de esta forma conocer los puntos donde llegara al terminar el
recorrido, del mismo modo se conoce el ángulo que deben mantener los sensores
LINK e IR SEEKER para que cada robot mantenga su posición en la formación.
Al implementar la comunicación Bluetooth en tiempo real se conoce por medio del
robot maestro cual robot esclavo está dentro o fuera de la formación.
Al realizar pruebas del algoritmo implementado en LabVIEW, se observó que la
formación toma las decisiones apropiadas para evitar obstáculos, mantener una
distancia entre los robots y conocer la posición actual del maestro.
Por medio de esta investigación se pueden generar diversos proyectos de grado que
pueden mejorar la aplicación de la robótica cooperativa como pueden ser:
La aplicación de evasión por campos magnéticos para el robot maestro, en donde este
evita varios obstáculos dentro de un espacio determinado y de esta forma tenga la
La implementación de otro tipo de plataforma robótica como los DANI 2.0, que se
encuentran en el grupo de investigación ROMA, los cuales son más robustas que los
utilizados en este trabajo, en cuanto a sensores, estructura, comunicación y
procesamiento, generando mayor precisión y estabilidad dentro de la formación
Generar una formación donde los esclavos puedan tomar la posición de maestro
cuando este último tenga algún problema de funcionamiento, dándole la posibilidad al
siguiente en la formación de dirigir el convoy y así garantizar la culminación de la
tarea.
Referencias
[1] B. Brumitt and M. Hebert, “Experiments in autonomous driving with concurrent goals
and multiple vehicles,” in Proceedings. 1998 IEEE International Conference on
Robotics and Automation (Cat. No.98CH36146), vol. 3, pp. 1895–1902.
[2] A. Botía, D. Gallardo, and M. I. Alfonso, “Comportamientos coordinados en formaciones
de robots usando percepción visual y comunicación punto a punto 1.”
[3] “Lego Mindstorms NXT en Español: El Sensor Ultrasónico (o de ultra sonido).” [Online].
Available:
http://rbtnxt.blogspot.com/2009/02/el-sensor-ultrasonico-o-de-ultra-sonido.html. [Accessed: 29-Jan-2019].
[4] “NXT IRLink Sensor.” [Online]. Available:
https://www.hitechnic.com/cgi-bin/commerce.cgi?key=NIL1046&preadd=action. [Accessed: 29-Jan-2019].
[5] “NXT IRSeeker V2.” [Online]. Available:
https://www.hitechnic.com/cgi-bin/commerce.cgi?preadd=action&key=NSK1042. [Accessed: 29-Jan-2019].
[6] “Tienda RO-BOTICA: Servo motor LEGO MINDSTORMS EV3.” [Online]. Available:
http://ro-botica.com/Producto/Servo-motor-LEGO-MINDSTORMS-EV3. [Accessed:
11-Nov-2017].
Available:
https://www.electricbricks.com/lego-education-mindstorms-nxt-9841-ladrillo-inteligente-nxt-lego-education-p-251.html. [Accessed: 09-Nov-2017].
[8] “Definición de convoy - Qué es, Significado y Concepto.” [Online]. Available:
https://definicion.de/convoy/. [Accessed: 23-Oct-2017].
[9] “(PDF) Modelamiento cinemático y odométrico de robots móviles: aspectos
matemáticos.” [Online]. Available:
https://www.researchgate.net/publication/233603982_Modelamiento_cinematico_y_odo
metrico_de_robots_moviles_aspectos_matematicos. [Accessed: 29-Jan-2019].
[10] “(PDF) Modelización de pequeños robots autónomos: un ejemplo.” [Online]. Available:
https://www.researchgate.net/publication/242644448_Modelizacao_de_pequenos_robo
ts_autonomos_um_exemplo. [Accessed: 01-Feb-2019].
[11] G. R. B. Bohórquez, M. R. P. Pereira, E. A. B. González, L. Y. L. Osorio, and J. E. C.
Ortiz, “Modelo cinemático de un robot móvil implementado con LEGO NXT para un
sistema de localización Indoor diseñado en LABVIEW,” Tecnura, vol. 16, pp. 23–33,
Oct. 2012.

![Figura 7. Esquema de una plataforma diferencial en el espacio.[9]](https://thumb-us.123doks.com/thumbv2/123dok_es/7264329.344973/8.918.289.652.83.416/figura-esquema-plataforma-diferencial-espacio.webp)