DISEÑO Y SIMULACIÓN DE UN GRIPPER PARA LA MANIPULACIÓN DE RECIPIENTES EN LA FMS HAS – 200
NEILY YANETH GONZÁLEZ GARCÍA 20132374102 WILLIAM ALFONSO GARZÓN ORTIZ 20092074028
DIRECTOR: ING. JOHN ALEJANDRO FORERO CASALLAS M.SC.
UNIVERSIDAD DISTRITAL – FRANCISCO JOSÉ DE CALDAS FACULTAD TECNOLÓGICA
DISEÑO Y SIMULACIÓN DE UN GRIPPER PARA LA MANIPULACIÓN DE RECIPIENTES EN LA FMS HAS – 200
NEILY YANETH GONZÁLEZ GARCÍA 20132374102 WILLIAM ALFONSO GARZÓN ORTIZ 20092074028
DIRECTOR: ING. JOHN ALEJANDRO FORERO CASALLAS M.SC.
TRABAJO PARA OPTAR AL TÍTULO DE TECNÓLOGO MECÁNICO
PRESENTADO A:
PROYECTO CURRICULAR DE TECNOLOGÍA MECÁNICA
UNIVERSIDAD DISTRITAL – FRANCISCO JOSÉ DE CALDAS FACULTAD TECNOLÓGICA
Nota de aceptación.
____________________________________ ____________________________________ ____________________________________ ____________________________________ ____________________________________ ____________________________________ ____________________________________ ____________________________________
_______________________________________ JURADO.
_____________________________________ Ing. John Alejandro Forero Cazallas M.Sc.
TABLA DE CONTENIDO
Pág.
RESUMEN ... 12
INTRODUCCIÓN. ... 15
1 PLANTEAMIENTO DEL PROBLEMA ... 17
1.1 JUSTIFICACIÓN... 19
2 OBJETIVOS ... 20
3 CONCEPTOS, APLICACIONES Y VARIABLES A TENER EN CUENTA EN EL DISEÑO DE GRIPPERS. ... 21
3.1. APLICACIONES DE LOS GRIPPERS ... 21
3.2 TENDONES ARTIFICIALES ... 23
3.3 INDUSTRIAS EN GRIPPERS ... 25
3.4 ROBÓTICA INDUSTRIAL... 29
3.5 CINEMÁTICA DE GRIPERS. ... 33
4 ANÁLISIS DE DATOS, FÓRMULAS Y TIPOS DE GRIPPERS PARA LA SELECCIÓN DE DISEÑO. ... 36
4.1 Tipos de grippers y elección del tipo de grippers o pinzas ... 36
4.1.1 Grippers de superficie única ... 36
4.1.2 Grippers magnéticos ... 36
4.1.4 Grippers de sujeción... 39
4.1.5 Grippers flexibles ... 41
4.2 Resistencia de materiales ... 42
4.4 ACCIONAMIENTOS FINALES ... 44
4.5 TIPOS DE MOVIMIENTO ... 47
4.5.1. Rotación pura ... 47
4.5.2 Traslación pura ... 47
4.5.3. Movimiento complejo ... 47
4.6 Eslabones y cadenas cinemáticas... 47
4.6.1 Eslabón ... 47
4.6.2. Cadena cinemática ... 48
4.6.3 Grados de libertad ... 48
4.7 PROGRAMA DE DISEÑO NX DE SIEMENS® ... 50
4.7.1 Mechatronics Concept Designer de Siemens PLM ... 50
5 MODELADO DE LOS PROTOTIPOS DE GRIPPER PROPUESTOS EN LA PLATAFORMA NX DE SIEMENS® ... 51
5.1 Variables y parámetros necesarios para el modelado de los grippers. ... 51
5.2 Modelado de los grippers en plataforma NX de Siemens® ... 57
5.3 Ensamble ... 60
5.4 Diseñador de conceptos mecatrónicos para la simulación. ... 63
6 EVALUACIÓN DE LOS PROTOTIPOS DE GRIPPER SELECCIONADOS Y MODELADOS EN LA PLATAFORMA NX DE SIEMENS®. ... 68
6.1 Evaluación de las características de cada diseño con ayuda de la herramienta simulación avanzada. ... 68
6.2 Evaluación de las características de cada diseño con ayuda de la simulación con Diseñador de Conceptos Mecatrónicos. ... 75
7 ANÁLISIS DE RESULTADOS, FICHA TECNICA Y DETALLES DEL PROTOTIPO DE GRIPPER DEFINITIVO. ... 79
7.2 Planos ... 83
7.3 Proceso de fabricación ... 86
7.4 Ficha técnica. ... 87
8 INFORME PRESUPUESTAL. ... 89
9 CONCLUSIONES... 90
INDICE DE TABLAS
Pág. Tabla 1 . Características Robot Mitsubishi RV-M1 ... 44 Tabla 2 matriz QDF, evaluación de características de diseño de los prototipos de
INDICE DE FIGURAS
Pág.
FIGURA 1. Fase generatriz y de estructura del Nitinol. ... 24
FIGURA 2. Presentación industrial de un “ Adaptive robot gripper 2-FINGER 85”. .... 26
FIGURA 3. Emulación brazo humano con manipulador robótico. ... 30
FIGURA 4. Representación gráfica de los movimientos lineales de la configuración cartesiana. ... 31
FIGURA 5. Representación gráfica de los movimientos producidos en la configuración cilíndrica. ... 32
FIGURA 6. Representación gráfica de los movimientos producidos en la configuración polar o esférica. ... 32
FIGURA 7. Representación gráfica de los movimientos producidos en la configuración angular. ... 33
FIGURA 8. Representación de la cinemática directa de un robot manipulador con el método de Denavit Hartenberg ... 34
FIGURA 9. Representación el sistema de referencia fijo arbitrariamente escogido en un dedo robótico. ... 35
FIGURA 10. Representación de un imán permanent (1. Non magnetic material; 2. Permanent magnet; 3. Ferromagnetic housing; 4. Object). ... 37
FIGURA 11. Representación de los diferentes tipos de ventosas. ... 38
FIGURA 12. Presentación industrial de los grippers de dos y tres mandíbulas. ... 40
FIGURA 13. Representación de pinzas de dedos múltiples. ... 41
FIGURA 14. Manipulador robótico Mitsubishi Movemaster RV M1. ... 43
FIGURA 15. Posicionamiento de puntos del robot dentro de su área de trabajo. ... 43
FIGURA 16. Clasificación de accionamientos finales automatizados. ... 45
FIGURA 17. Secuencias de trabajo de los actuadores. ... 46
FIGURA 18. Representación de mecanismo de cadena abierta y cerrada de un robot industrial. ... 49
FIGURA 19. Representación de recipientes contendores FMS HAS 200 ... 52
FIGURA 20. Representación de recipientes contendores al momento de la disposición de los cilindros sobre la plataforma de paletizado FMS HAS 200 ... 54
Figura 21. Montaje ensayo de laboratorio medición de fuerza necesaria para destapado de recipiente FMS HAS 200. ... 55
Figura 22. Montaje ensayo de laboratorio medición de fuerza necesaria para destapado de recipiente FMS HAS 200. ... 55
FIGURA 23. Plano dimensiones de robot Mitsubishi Movemaster RM-V1 ... 57
FIGURA 25. Ventana de entorno modelado en NX de Siemens® opción croquis ... 58
FIGURA 26. Herramientas geométricas 2D en NX de Siemens®, ... 59
FIGURA 27. Herramientas geométricas 3D en NX de Siemens® ... 59
FIGURA 28. Pieza modelada y extruida en NX de Siemens® ... 60
FIGURA 29. Entorno de ensamble en la plataforma de NX de Siemens® ... 61
FIGURA 30. Entorno de ensamble para agregar componentes o piezas en la plataforma de NX de Siemens® ... 62
FIGURA 31. Entorno de ensamble para poner restricciones de componentes o piezas y organizar el ensamble en la plataforma de NX de Siemens®, ... 63
FIGURA 32. Entorno de diseñador de conceptos mecatrónicos para simulaciones del ensamble en la plataforma de NX de Siemens®, ... 64
FIGURA 33. Opción de cuerpo rígido de diseñador de conceptos mecatrónicos para simulaciones del ensamble en la plataforma de NX de Siemens®, ... 65
FIGURA 34. Opción de juntas de diseñador de conceptos mecatrónicos para simulaciones del ensamble en la plataforma de NX de Siemens®. ... 66
FIGURA 35. Opción de control de posición de diseñador de conceptos mecatrónicos para simulaciones del ensamble en la plataforma de NX de Siemens® ... 67
FIGURA 36. Análisis de carga del gripper ... 70
FIGURA 37. Análisis de comportamiento de acuerdo al exceso de carga del gripper 1. 71 FIGURA 38. Tabla de propiedades mecánicas del ABS. ... 72
FIGURA 39. Gráfica del comportamiento del análisis de carga del gripper 1 ... 73
FIGURA 40. Análisis de fuerza pinza gripper 2 ... 74
FIGURA 41. Gráfica de análisis de fuerza de la pinza gripper 2 ... 74
FIGURA 42 Opción de cuerpo rígido para dar la posición y orientación a cada eslabón. ... 76
FIGURA 43 corrección de estas fallas y agarre de contenedores. ... 77
FIGURA 44 cuadro de dialogo variables requeridas para cálculo de velocidad del sistema. ... 77
FIGURA 45 Editor de secuencias para generar operaciones de movimientos del gripper y del Robot Mitsubishi. ... 78
FIGURA 46 acople del gripper con el brazo Mitsubishi RV-1 ... 80
FIGURA 47 Ensamble del gripper 2 con el brazo manipulador robot Mitsubishi RV-1 . 81 Figura 48. Brazo derecho e izquierdo del gripper 1 (mm) ... 84
FIGURA 49. Dimensiones generales de la carcasa o base del gripper 1. ... 84
INDICE DE ECUACIONES.
Pág.
Ecuación esfuerzo; ecuación 1………42
Ecuaciones de esfuerzo máximo; ecuación 2………42
Momento de flexión elástico; ecuación 3………..42
Ecuación Gruebler; ecuación 4……….49
Ecuación Kutzbash; ecuación 5………49
LISTA DE ANEXOS
ANEXO 1 Video “funcionamiento gripper1”.
ANEXO 2 Video “funcionamiento gripper2”.
ANEXO 3 Planos de gripper 1
12 RESUMEN
En este proyecto se realizó el modelado y simulación de prototipos de gripper para el brazo robótico industrial Mitsubishi Movemaster RV-M1 que opera en la FMS HAS – 200, de la Universidad Distrital – Francisco José de Caldas, Facultad Tecnológica, con ayuda del programa de diseño NX de Siemens®, los grippers fueron simulados siguiendo el proceso de diseño y teniendo en cuenta las características dimensionales del brazo robótico, para posteriormente realizar el modelado de los mismos, además se realizó un estudio de las plataformas con las que cuenta el programa NX de Siemens®.
Al momento de reconocer los componentes que integran el programa de NX de Siemens® se dio inicio al modelado de los diseños preliminares, posteriormente se inició con los ensambles para cada diseño y de esta manera se verificaron las dimensiones que ya se habían estipulado.
Luego de tener el ensamble se usó la aplicación de “diseñador de elementos mecatrónicos” o “Mechatronics Concept Designer” de la plataforma de NX de Siemens®, para la realización de las respectivas simulaciones, ya que, con ayuda de esta herramienta se puedo simular los procesos completos, puesto que en esta se pudo crear y validar conceptos mecatrónicos, definir secuencias de operación, evaluar el tiempo de operación, llevar el movimiento al diseño asistido por computadora, generar una lista de sensores y actuadores ,además de enlaces lógicos de eventos con señales y se identificaron y especificaron detalles críticos, generando de esta manera los movimientos específicos del procesos de los grippers que se simularon, adicionalmente se tuvo en cuenta el tipo de junta y los parámetros de velocidad y posición de cada uno para la respectiva simulación.
13
técnica del prototipo que cumplió de la mejor manera con dichas características, y por último se realizó un informe presupuestal de éste.
ABSTRACT
In this project modeling and simulation of gripper prototypes for the industrial robotic arm Mitsubishi Movemaster RV-M1 operating in the FMS HAS - 200, of the District University - Francisco José de Caldas, Technological Faculty, with the help of the program of NX design of Siemens®, the grippers were simulated following the design process and taking into account the dimensional characteristics of the robotic arm, to later perform the modeling of the same, in addition a study of the platforms with which the NX program was carried out of Siemens®.
At the moment of recognizing the components that make up the Siemens® NX program, modeling of the preliminary designs began, then the assemblies were started for each design and in this way the dimensions that had already been stipulated were verified.
After having the assembly, the application of "Mechatronic element designer" or "Mechatronics Concept Designer" of the NX platform of Siemens® was used for the realization of the respective simulations, since, with the help of this tool, we can simulate the complete processes, since in this it was possible to create and validate mechatronic concepts, define sequences of operation, evaluate the operation time, take the movement to the computer-aided design, generate a list of sensors and actuators, as well as logical links of events with signals and critical details were identified and specified, thus generating the specific movements of the grippers processes that were simulated, in addition, the type of meeting and the velocity and position parameters of each one were taken into account for the respective simulation.
14
15
INTRODUCCIÓN.
En el presente trabajo se mostrarán los diseños de prototipos de grippers para el brazo robótico industrial Mitsubishi Movemaster RV-M1 que opera en la FMS HAS – 200, de la Universidad Distrital – Francisco José de Caldas, Facultad Tecnológica, los grippers son diseñados con el fin de suplir las necesidades de los procesos de producción en la industria y de esta manera generar desarrollo y competitividad a nivel industrial.
En los documentos tomados como referencia, se exponen estudios relacionados con el desarrollo y la evolución de grippers, avance cinemático de grippers, servomotores, materiales de movimiento y prototipos que se han hecho de éstos elementos y de las múltiples funciones que cumplen a nivel industrial, es decir del diseño en general de grippers. Información que es fundamental para el análisis del diseño de los prototipos que se realizaron con ayuda del programa NX de Siemens®, también se muestra el estudio de las características fundamentales de dichos elementos que sirven como mecanismos de agarre y se asemejan a la anatomía de las extremidades superiores del cuerpo humano, por lo que en los diseños fue necesario tener en cuenta los grados de libertad, la configuración y la cinemática directa e inversa para que realizara los movimientos requeridos y que cumpliera a cabalidad con las especificaciones establecidas.
16
17
1 PLANTEAMIENTO DEL PROBLEMA
En la actualidad es de gran importancia tener el control en cuanto a los tiempos de producción de los procesos, es por ello que se ha venido automatizando de manera paulatina las cadenas de producción, para esto se han implementado diferentes tipos de “máquinas inteligentes” que brindan la facilidad de mejorar y de cumplir con ciertos estándares de calidad en los procesos industriales.
Con los conocimientos adquiridos a lo largo del desarrollo de la carrera y gracias a las bases de datos con las que cuenta la Universidad Distrital - Francisco José de Caldas, es posible hacer un estudio de algunos softwares especializados directamente en áreas de gran importancia de nuestro perfil profesional como lo son: diseño y manufactura de sólidos, simulación y control de mecanizados, además del desarrollo de análisis de fenómenos en entornos reales, lo cual es de gran ayuda, porque de esta manera se obtienen profesionales mejor capacitados, actualizados y competitivos en el ámbito laboral.
En la Facultad Tecnológica de la Universidad Distrital - Francisco José de Caldas, en uno de los laboratorios del programa de Tecnología en Gestión de la Producción Industrial, encontramos la celda de manufactura flexible HAS – 200 “que permite trabajar en modo autónomo integrado en función de la sección realizada en el selector l/ll del panel de control situado en el frontal de la estación”1. Esta FMS (por sus siglas
en inglés: flexible manufacturing systems) cuenta con 11 estaciones las cuales se encargan de:
Estación 1. Control y visualización: esta estación se encarga de suministrar al sistema los recipientes vacíos.
18
Estación 2, 3 y 4. Estas estaciones son las encargadas de llenar y pesar los recipientes, cada estación cuenta con 1 color diferente (amarillo, azul y rojo)
Estación 5 y 6. Estas estaciones se usan para medir la cantidad de materia prima de cada recipiente, la estación 5 mide con enconder lineal y la estación 6 mide con potenciómetro.
Estación 7. Esta estación es la encargada de sellar los recipientes y etiquetarlos de acuerdo a su correspondiente producto.
Estación 8 y 9. Estas estaciones se encargan del almacenamiento de los recipientes de forma horizontal y vertical.
Estación 10. Esta estación se encarga de paletizar el producto final.
Estación 11. Esta estación es la encargada de separar automáticamente las perlas de colores mezcladas y adicionalmente almacenar la materia prima (recipientes, tapas y perlas de diferentes colores).
El funcionamiento de la HAS – 200 es el de simular una planta de producción donde se pueden realizar varios procesos dependiendo lo requerido en el momento, esta es una máquina automatizada, pero, se podría generar una mayor autonomía si se instala un brazo y una pinza robótica (gripper) en la estación 11, ya que en la actualidad ésta no cuenta con dicho elemento, esto genera que la separación de las materias primas se realice manualmente, trayendo como consecuencia pérdidas de autonomía.
19 1.1 JUSTIFICACIÓN
La necesidad que se tiene de automatizar por completo los procesos de producción ha llevado a que la robótica sea implementada como solución para la optimización de calidad y eficiencia de dichos procesos, teniendo gran éxito a lo largo de su uso, puesto que, ha generado excelentes resultados, por esta razón han ido apareciendo una gran variedad de opciones basadas en esta área, entre ellas y la que más nos interesa es la implementación y fabricación de grippers, estos grippers nos dan la oportunidad de convertir procesos largos y tediosos en procesos cortos y simples.
20
2 OBJETIVOS
3.1 Objetivo general
Diseñar y simular un gripper para la manipulación de recipientes en la FMS HAS – 200, con ayuda del programa de diseño NX de Siemens®.
3.2 Objetivos específicos
• Investigar los conceptos y variables necesarios para la construcción de un gripper.
• Analizar los datos y fórmulas existentes, para las propuestas de los diferentes prototipos de grippers.
• Modelar los diferentes prototipos propuestos en la plataforma NX de Siemens®.
• Evaluar las características de cada diseño, para la selección del prototipo adecuado, mediante las herramientas de simulación de la plataforma NX de Siemens®.
• Crear una ficha técnica del diseño del prototipo seleccionado.
21
3 CONCEPTOS, APLICACIONES Y VARIABLES A TENER EN CUENTA EN EL DISEÑO DE GRIPPERS.
3.1. APLICACIONES DE LOS GRIPPERS
Se han hecho robots que son utilizados para realizar tareas de campo importantes como la manipulación de material peligroso, inspección en plantas nucleares y la exploración espacial, entre otras. Es importante realizar diseños que tengan arquitectura abierta o que sean modulares con el fin de que estos sean de fácil adaptación. En nuestro diario vivir, la mano humana es el órgano principal para la recepción y reacción a los estímulos táctiles, los cuales son la guía de nuestro repertorio de funciones manuales, sin embargo, la integración de una colección de sensaciones análogas en una plataforma robótica propone un gran desafío tecnológico, para el cual el uso de software de simulación para el diseño mecánico y el uso de herramientas matemáticas ayuda con el desarrollo de una determinada estructura o de un determinado sistema; Banks, Maeno, Cunha, indican que dentro de la estructura mecánica que se implementa en el diseño de grippers los actuadores rotatorios son uno de los componentes más importantes usados para la generación de movimiento, los cuales junto con un buen diseño mecánico trata de reproducir la acción de la mano humana y la muñeca. Según Oscar F, Siamanca; Pedro León, y otros2 el antropomorfismo es uno de los factores principales que se deben observar en proyectos de prótesis para los miembros superiores o en el desarrollo de grippers que semejen lo más exactamente posible a la mano humana, y, en consecuencia, la reproducción de los movimientos y las formas naturales de los dedos llegan a ser muy importantes. Un gran problema constructivo se relaciona con la manera del cómo será
22
desarrollada y fabricada la transmisión de los movimientos para las articulaciones, Doersam, Mason.
Wilkinson, implementó un mecanismo que utiliza un tejido artificial como tendón extensor y el cual junto con los músculos emula bastante bien un dedo humano y su funcionamiento. Las implementaciones del tendón extensor son poco usadas debido a su complejidad y la dificultad para realizar el control. Este trabajo proporciona una comprensión de la funcionalidad del mecanismo del tendón extensor para que se puedan extraer las características cruciales que necesitan ser imitadas para construir una mano artificial.
Banks y Pollard describen que la mano humana puede servir como paradigma para una interfaz robótica con el ambiente, así, su morfología ha mantenido activo el interés por las investigaciones en manipuladores y en particular en los efectores finales de tipo gripper, donde su funcionalidad sigue siendo una referencia para la realización de nuevos diseños. Uno de los desafíos de esta línea de investigación es una emulación de anatomía humana, lo que a menudo puede resultar embarazoso y complicado de llevar a cabo, la fabricación y mando de un solo dedo robótico inspirado por la anatomía humana, debe ser un buen inicio para el diseño de un efector final apropiado para un robot humanoide.
23
flexión/extensión cómo un tendón, aplicado esto en un dedo mecánico puede perfeccionarse para la capacidad de transmisión de fuerza equivalente al dedo del índice humano.
3.2 TENDONES ARTIFICIALES
En cuanto a tendones artificiales podemos decir que para su fabricación se usan generalmente materiales inteligentes que se definen como capaces de recordar su forma y capaces de volver a esa forma después de ser deformados, el efecto que se puede producir por cambio térmico magnético, siendo capaces de repetir el proceso infinidad de veces sin deteriorarse.
• NITINOL
Se trata de una aleación de níquel y titanio en proporciones casi equi-molares y que tiene propiedades de memoria de forma excelentes. Esta aleación particular, tiene además muy buenas propiedades eléctricas y mecánicas, resistencia a la fatiga, y resistencia a la corrosión.
El NiTi presenta todas las propiedades típicas en las Aleaciones con memoria de forma o SMA (por sus siglas en inglés: shape memory alloy):
• Transformación martensítica termoelástica. • Memoria de forma simple.
• Memoria de forma doble. • Superelasticidad.
• Pseudoelasticidad.
• Capacidad de amortiguamiento.
24
En este tipo de transformación tenemos una fase de alta temperatura llamada austenita, también conocida como fase generatriz y de estructura cúbica. Si enfriamos el material, su estructura cambia y pasa a una estructura de laminillas, sumamente entretejidas y dispuestas en cortes alternados, llamada martensita, como se puede ver en la figura 1. La estructura cortada en forma alternativa, es decir, en cortes opuestos consecutivos, conserva la forma general del cristal.
FIGURA 1. Fase generatriz y de estructura del Nitinol.
Fuente: https://www.seas.es/blog/diseno_mecanico/materiales-con-memoria-de-forma-elnitinol/
Cuando este material se encuentra en frío, o por debajo de su temperatura de transformación, según el estudio de Arnedo Agustin 3 tiene un límite elástico muy bajo y se puede deformar con bastante facilidad en cualquier forma nueva, que se mantendrá. Sin embargo, cuando el material se calienta por encima de su temperatura de transformación experimenta un cambio en la estructura de cristal que hace que se vuelva a su forma original. Si la aleación se encuentra con cualquier resistencia durante esta transformación, puede generar fuerzas muy grandes. Este fenómeno ofrece un mecanismo único para el accionamiento remoto.
25 3.3 INDUSTRIAS EN GRIPPERS
Antes de comenzar con el diseño de grippers, es necesario revisar trabajos actuales relacionados con agarre de objetos basados en los estudios de Giuseppe Carbone4 y G. Fuster. A. Maria5 los grippers se clasificarán en tres principales grupos: industriales, aficionados o de ocio y otros.
3.3.1 Grippers industriales.
• Grippers de robot adaptable
Usados en aplicaciones industriales, tienen dos o tres dedos con dos grados de libertad, son compatibles con todos los principales fabricantes industriales y le permiten manipular una gran variedad de objetos. Están diseñados para facilitar la expulsión de piezas y el asiento de parte. Algunas de las aplicaciones son máquinas tending, robots colaborativos y montaje.
• Grippers de dos dedos 2-FINGER 85 (3)
Aunque puede captar una gran variedad de objetos, es perfecto para elementos con dos caras paralelas o Cilíndricos que utilizan su modo abarcador debido a sus dos grados de libertad. Como se puede observar en la figura 2.
4 Giuseppe Carbone, ‘CLASIFICACION DE MECANISMOS EN PINZAS INDUSTRIALES DE DOS DEDOS’, 7.5400 (2003), 59–75.
26
FIGURA 2. Presentación industrial de un “ Adaptive robot gripper 2-FINGER 85”.
Fuente: Anna Maria and Gil Fuster, ‘Gripper Design and Development for A Modular Robot’, 2015.
• 2-FINGER 200 (3)
Con una carrera de 200 mm y una carga útil de 23 kg, esta pinza Robot sellada y programable puede manejar una amplia variedad de piezas. Las principales diferencias con la anterior es que también puede captar objetos desde dentro de un agujero y los objetos pueden ser mucho más pesados.
• 3-FINGER (3)
Proporciona capacidades similares a las de los robots y tiene confiabilidad en entornos no estructurados. Se utiliza en diversas aplicaciones industriales. Está diseñado para tareas avanzadas de manipulación.
• Grippers neumáticos 6
AGI pinzas neumáticas tienen una amplia gama de tamaños, estilos de mandíbula y fuerzas de agarre para casi cualquier aplicación industrial. Los tres tipos principales de pinzas neumáticas son pinzas paralelas, pinzas angulares y unidades personalizadas tales como máquinas de ensamblaje de juntas teóricas. Estos productos se utilizan en
27
diversas industrias como el aeroespacial, automotriz, electrodomésticos, sistemas de Oring industriales automatizados, electrónica, médica y de embalaje.
• Gripper paralelo compacto de perfil bajo
Es ideal para el manejo de piezas pequeñas. Tiene carrera larga y peso ligero diseñado para aplicaciones robóticas donde el peso es un problema.
• Gripper paralelo de mordaza simple - Una mordaza fija
Está hecho para su uso en espacios reducidos que necesitan grandes cargas útiles. Es ideal para situaciones en las que la posición cero de una mandíbula es necesaria. Esta pinza tiene un diseño de cojinete de ranura en T que se soporta la longitud del cuerpo para llevar cargas pesadas.
• Pinza de doble movimiento
Está diseñado para facilitar la expulsión de piezas y el asiento de parte, cuenta con un sello automatizado y ensamblaje de junta tórica para pequeñas y grandes aplicaciones de junta tórica o de recogida y asiento.
3.3.2 Grippers por Hobby u ocio • Gripper Bioloid
28 • Modelo simple
Una pinza se puede montar fácilmente con dos marcos de metal y un solo servo. En este caso, una de las tramas está directamente fijada a la caja del servo y sólo la segunda está en movimiento. Es útil principalmente para objetos grandes.
• AX-12 Doble Grifo Robótico.
Este diseño de pinza de brazo robótico es ideal para numerosas tareas de manipulación de brazos robóticos que se pueden aplicar a todo tipo de formas. Los dos servos pueden moverse sincrónicamente con un grado de libertad o independientemente con dos grados de libertad.
• Lego Mindstorms® gripper
Lego Mindstorms® es un kit que contiene software y hardware para crear robots personalizables y programables. Incluyen una computadora de ladrillo inteligente que controla el sistema, algunos sensores modulares, motores y partes de Lego para crear los sistemas mecánicos. Su aplicación es principalmente educativa. Hay dos versiones: NXT es la primera y la segunda es EV3 con las mismas características, pero más potente y con mayor variedad de sensores.
• NXT simple gripper
Con algunas piezas Lego, algunos engranajes y un solo motor, se puede montar una pinza angular sin grandes dificultades.
• NXT crane
29 3.3.3 Otros
• Universal gripper
La pinza robótica universal se basa en el atascamiento del material granular. Los dedos individuales son reemplazados por una sola masa de material granular que, cuando se presiona sobre un objeto objetivo, fluye alrededor de él y se ajusta a su forma. Tras la aplicación de un vacío, el material granular se contrae y se endurece rápidamente para pellizcar y sujetar el objeto sin requerir retroalimentación sensorial.
• Makeblock robot gripper
Está hecho de un PVC pesado pero ligero y tiene material antideslizante adicional en el interior de dos dedos. Viene con cuatro orificios de rosca M4 estándar en la parte inferior para facilitar el montaje a cualquier otro robot.
3.4 ROBÓTICA INDUSTRIAL
30
FIGURA 3. Emulación brazo humano con manipulador robótico.
Fuente: «Control y Robótica». Julio de 2017: http://www.portaleso.com/usuarios/Toni/web_robot_3/robot_indice.html.
Según Martínez, Jáquez y Rivera7 La robótica industrial surge a partir de la unión de la mecánica articulada y sistemas electrónicos de control incorporando una computadora. Esto permite la integración del control y la programación para realizar movimientos precisos sobre el robot y la memorización de secuencias como, por ejemplo, el descargar una pieza de la matriz debido a que el ambiente de fundición no es apropiado para los trabajadores por sus altas temperaturas. Por esta razón los robots industriales ofrecen adaptación a diversos trabajos y medios de trabajo. Actualmente, los robots son utilizados en la industria manufacturera para:
• Transporte y transferencia de materiales y piezas.
• Operación y procesamiento.
• Montaje y control de calidad.
Los robots industriales en su configuración básica esta conformados por un brazo compuesto por articulaciones como uniones entre ellos. En la última unión se dispone
31
de una garra o herramienta de trabajo. Según Carranza8 debido a que el área de trabajo de los robots es limitada para la realización de diferentes trabajos, se dispone de diferentes configuraciones para la accesibilidad a posiciones determinadas de trabajo. La mayoría de robots disponen de cuatro configuraciones básicas: configuración cartesiana, configuración cilíndrica, configuración polar o esférica y configuración angular.
3.4.1 Configuración cartesiana
La configuración cartesiana, posee tres movimientos lineales, su nombre proviene de las coordenadas cartesianas. De los movimientos que realiza el robot, 18 los realiza de modo rectilíneo, es decir en las coordenadas XYZ, como se ve en la figura 4. Se le denominan movimientos de desplazamiento X, altura Y, y alcance del brazo Z.
FIGURA 4. Representación gráfica de los movimientos lineales de la configuración cartesiana.
Fuente: http://www.portaleso.com/web_robot_3/robot_indice.html. Octubre 2017. 3.4.2 Configuración cilíndrica.
Este tipo de configuración cilíndrica posee una articulación de revolución y dos prismáticas. Para este tipo de configuración en comparación en la mostrada en la figura 8, se reemplaza la primera articulación prismática por una articulación de
32
revolución, los puntos a alcanzar son especificados con coordenadas cilíndricas, es decir, ángulo α, altura ρ y radio Z, como se indica en la figura 5.
FIGURA 5. Representación gráfica de los movimientos producidos en la configuración cilíndrica.
Fuente: http://www.portaleso.com/web_robot_3/robot_indice.html. Octubre 2017 3.4.3 Configuración polar o esférica.
La configuración polar emplea: dos articulaciones de revolución y una prismática, específicamente un ángulo de rotación de la base, un ángulo de elevación y una extensión lineal del brazo. La configuración esférica emplea coordenadas polares (α, β, ρ) como se muestra en la figura 6.
FIGURA 6. Representación gráfica de los movimientos producidos en la configuración polar o esférica.
33 3.4.4 Configuración angular.
La configuración angular es una estructura con tres articulaciones de revolución, la articulación de la base es de movimiento rotacional y las otras dos de movimiento angular (α, β, ɤ) como se muestra en la figura 7. Estos tipos de robot se parecen al brazo humano, con una cintura, el hombro, el codo, la muñeca.
FIGURA 7. Representación gráfica de los movimientos producidos en la configuración angular.
Fuente: http://www.portaleso.com/web_robot_3/robot_indice.html. Octubre 2017 3.5 CINEMÁTICA DE GRIPERS.
Basados en el estudio realizado por Sánchez9 la cinemática estudia los movimientos de los cuerpos independientes de las causas que lo producen. Para esto es necesario calcular la cinemática directa, inversa y el modelado dinámico de dedos antropomórficos.
3.5.1 Cinemática Directa
La cinemática directa de un robot manipulador describe la relación entre el movimiento de las articulaciones del manipulador y el movimiento resultante del cuerpo rígido el cual forma el robot. Un manipulador está compuesto por vínculos
34
seriales que están entrelazados por medio de una articulación prismática o rotacional que viene desde la base hasta el efector final del manipulador.
Calcular la posición y orientación del efector final en términos de las variables de las articulaciones se llama cinemática directa. Con el fin de tener cinemática directa para un mecanismo robótico de una manera sistemática, se debe utilizar un adecuado modelo cinemático. Denavit Hartenberg es un método que usa cuatro parámetros y es el más común para describir la cinemática de un manipulador como se muestra en la figura8.
FIGURA 8. Representación de la cinemática directa de un robot manipulador con el método de Denavit Hartenberg
Fuente: Daniel Humberto and Sánchez Calderón, ‘Consideraciones Anatómicas En El Diseño de Una Mano Artificial’, 2016.
35
de trasformación homogénea que relaciona el sistema con un sistema de referencia fijo arbitrariamente escogido como se muestra en la figura 9.
FIGURA 9. Representación el sistema de referencia fijo arbitrariamente escogido en un dedo robótico.
Fuente: Daniel Humberto and Sánchez Calderón, ‘Consideraciones Anatómicas En El Diseño de Una Mano Artificial’, 2016.
3.5.2 Cinemática Inversa
En la cinemática inversa el objetivo del problema es encontrar los valores que debe adoptar las articulaciones para que su efector final se posicione en la localización específica. El dedo antropomórfico se compone de 3 eslabones conectados por articulaciones de revolución.
36
4 ANÁLISIS DE DATOS, FÓRMULAS Y TIPOS DE GRIPPERS PARA LA SELECCIÓN DE DISEÑO.
4.1 Tipos de grippers y elección del tipo de grippers o pinzas
Este artículo publicado valora la pinza robótica como una de las partes más importantes de un sistema robótico. La pinza o gripper es el dispositivo entre el robot y la pieza de trabajo. La selección del gripper en un sistema robótico es por lo tanto muy importante. Hay muchos tipos diferentes de grippers y una gran variedad de factores a considerar. Según Karokh10 los tipos más comunes de grippers son: gripper de mandíbula, gripper de vacío y magnético, los tipos de grippers también se pueden clasificar en tres grupos principales: grippers de superficie única, grippers de sujeción y grippers flexibles. Para decidir qué tipo de gripper es más adecuado es necesario tener en cuenta las diferentes técnicas de agarre de cada tipo.
4.1.1 Grippers de superficie única
Cuando sólo está disponible una superficie del componente, estos tipos de pinzas son útiles para agarrar objetos ligeros, pesados y componentes planos que son difíciles de manejar por otros medios. Estos tipos de grippers agarran los componentes por fuerza de tracción en lugar de fuerza de empuje, comunes para las pinzas robóticas.
4.1.2 Grippers magnéticos
Hay dos tipos de grippers magnéticos que son de imanes permanentes y de electroimanes. Este tipo de grippers sólo son aptos para recoger objetos ferrosos y son muy fáciles de controlar para funciones de recoger y soltar. Un imán permanente es un objeto que está hecho de un material magnetizado, Los imanes permanentes requieren un mecanismo para liberar el objeto sujetado como se muestra en la figura 10.
37
Además de los imanes permanentes, un campo magnético puede ser generado eléctricamente, el campo magnético es generado por un alambre herido en una bobina, cuando la electricidad está pasando a través del cable, el campo magnético se activa y el campo desaparece cuando la electricidad se ha ido. Los elevadores electromagnéticos se utilizan a menudo para recoger varios restos de hierro y acero, son comunes en las industrias manufactureras. Algunos objetos pueden ser magnetizados al momento de ser recogidos con electroimanes, pero este problema se puede reducir conectando los electroimanes a la corriente alterna. Los grippers electromagnéticos pueden recoger y liberar objetos en pocos segundos lo cual es beneficioso cuando el tiempo importa. Otros beneficios de los grippers electromagnéticos son que pueden ser dimensionadas para fuerzas muy grandes.
FIGURA 10. Representación de un imán permanent (1. Non magnetic material; 2. Permanent magnet; 3. Ferromagnetic housing; 4. Object).
Fuente: Gareth J.Monkman, Stefan Hesse, Ralf Steinmann, Henrik Schunk (2007). Robot Grippers, Wiley-VCH, Weinheim (ISBN 0-13-033030-2). Página 204 4.1.3 Grippers de vacío
Los grippers de vacío se convierten en ventosas, las ventosas están hechas de goma. La succión se conecta a través de tubos con dispositivos de baja presión para recoger artículos, liberando elementos de aire cuando se bombea hacia fuera en las ventosas. La presión puede ser creada con los siguientes dispositivos:
38 • Eyectores
• Fuelle de succión • Cilindros neumáticos
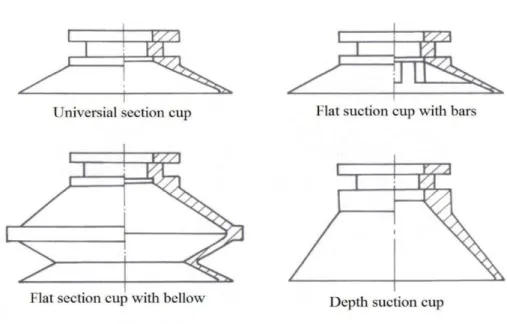
Los grippers de vacío utilizan ventosas como dispositivos de recogida. Hay diferentes tipos de ventosas y los vasos están generalmente hechos de poliuretano o caucho y pueden ser utilizados a temperaturas entre -50 y 200 ° C. La ventosa se puede clasificar en cuatro tipos diferentes: Ventosas universales, ventosas planas con barras, ventosas con fuelle y las ventosas de profundidad como se muestra en la figura 11.
FIGURA 11. Representación de los diferentes tipos de ventosas.
Fuente: Gunnar S Bolmsjö (2006). Industriell robotteknik, Studentlitteratur, Lund (ISBN 91-44-285124) pag. 204.
39
Las ventosas planas con barras son adecuadas para artículos planos o flexibles que necesitan asistencia cuando levantando estos tipos de ventosas proporcionan un pequeño movimiento bajo carga y área en la que actúa la depresión, esto reduce el desgaste de la ventosa plana con barras, conduciendo a un movimiento más rápido y más seguro.
Las ventosas con fuelle se usan generalmente para superficies curvadas, por ejemplo, cuando la separación es necesaria o cuando un objeto más pequeño está siendo agarrado y necesita un movimiento más corto. Este tipo de ventosas se pueden utilizar en varias áreas, pero permiten una gran cantidad de movimiento al agarrar y baja estabilidad con baja presión.
La ventosa de profundidad se puede utilizar para superficies que son muy irregulares y curvadas o cuando un artículo necesita ser levantado sobre un borde.
Artículos con superficies rugosas (rugosidad superficial ≤ 5 μm para algunos tipos de ventosas) o elementos que están hechos de material poroso tendrán dificultad con las pinzas de vacío. Un artículo con agujeros, ranuras y huecos en las superficies no son recomendados al manejar con grippers de vacío, ya que el si el material es poroso o tiene agujeros en su superficie, será difícil aspirar el aire. En tales casos, la fuga de aire puede reducirse si se utilizan ventosas más pequeñas.
4.1.4 Grippers de sujeción
40
requieren grandes esfuerzos Se utiliza la técnica hidráulica. La técnica neumática es más común debido al bajo precio, peso bajo y facilidad de uso.
Grippers de dos y tres mandíbulas
Los grippers de dos mandíbulas es el tipo más simple de pinzas de mandíbula, las pinzas de dos mandíbulas constan de dos agarres, los dedos que aplican presión externamente o internamente sobre el objeto dependiendo del diseño de la mandíbula, de la forma y el tamaño del objeto los dedos de la mandíbula se pueden diseñar diferente para un movimiento preciso y seguro. Los grippers de dos mandíbulas se pueden usar para objetos grandes y pequeños. La mecánica para el movimiento de los dedos de la mandíbula puede incluir articulaciones, levas, piñones y actuadores, y como se ha descrito anteriormente, cilindros hidráulicos y neumáticos, cuando las formas se vuelven más complejas de las que puede manejar el gripper de dos mandíbulas, el gripper de tres mandíbulas es una opción, para objetos con formas más complejas. Los grippers de tres mandíbulas consisten en agarrar los dedos y aplicar presión como los grippers de dos mandíbulas. Los grippers de tres mandíbulas son más complejos y por lo tanto más caros que los grippers de dos mandíbulas. En la figura 12 se presenta los grippers de dos y tres mandíbulas.
FIGURA 12. Presentación industrial de los grippers de dos y tres mandíbulas.
41 4.1.5 Grippers flexibles
Los grippers flexibles según O. Carbone11 consisten en varios eslabones en cada dedo y dos o varios dedos, normalmente tienen una dirección individual, estos tipos de grippers pueden compararse con una mano humana. Los grippers flexibles están diseñados para manejar una serie de artículos diferentes, una Variedad de estos grippers han sido producidos por varias investigaciones. Los grippers de múltiples dedos, que se relacionan con los grippers flexibles, son como una pinza humana. Este tipo de agarre puede tomar el objeto con formas muy complejas debido a las articulaciones en los dedos que se pueden controlar individualmente. Los dedos en estos tipos de grippers se pueden simular después de la forma del objeto que será agarrado. Otros tipos de grippers flexibles son los grippers suaves y grippers de mandíbula ajustable. En la figura 13 se muestra un gripper de múltiples dedos.
FIGURA 13. Representación de pinzas de dedos múltiples.
Fuente: Yoshihiro Kusuda. High speed vision sensor and quick robotic hand enable a robot tocatch a ball (2017), 319-321. Pág. 321
42 4.2 Resistencia de materiales
Para ver si la herramienta de agarre puede hacer frente a las fuerzas, es necesario hacer cálculos para saber la tensión máxima del material de la herramienta de agarre. Estas fórmulas se han utilizado y están especificadas 12 para calcular tensiones máximas:
𝜎𝑚𝑎𝑥 = 𝐸𝑠𝑓𝑢𝑒𝑟𝑧𝑜 𝑚á𝑥𝑖𝑚𝑜 [𝜎𝑚𝑎𝑥] =𝑀𝑚𝑎𝑥 𝑊𝑏 . (2) (1) Dónde:
Mmax= Torque Máximo
Wb= momento de flexión elástico
𝑀𝑤𝑏 = ℎ𝑏
2
6
(3)
4.3 Manipulador Robótico RV-M113
El manipulador robótico Mitsubishi Movemaster RV- M1 es un sistema robótico que cuenta con cinco grados de libertad, como se muestra en la figura 14, con capacidad de carga de 1.2 Kg sin incluir el peso del efector final adaptado a él. El sistema que permite operar el robot, se encuentra constituido por:
• Brazo articulado. • Efector final (Original). • Teaching box.
• Controlador.
12 DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA INTEGRADO DE CLASIFICACIÓN Y CONTROL DE CALIDAD UTILIZANDO UN MANIPULADOR TIPO DELTA Y MANO ROBÓTICA ANTROPOMÓRFICA’, 2014.
43 • Cables de conexión.
• Computador con software para establecer comunicación con el robot.
FIGURA 14. Manipulador robótico Mitsubishi Movemaster RV M1.
Fuente: Manual del brazo de Robot Mitsubishi Movemaster RV M1. Septiembre de 2017.
Cada articulación puede rotar de forma limitada, para ofrecer al robot la posibilidad de posicionarse en puntos dentro de su volumen de trabajo (figura 15), como se puede observar a continuación.
FIGURA 15. Posicionamiento de puntos del robot dentro de su área de trabajo.
44
Las características técnicas del robot Mitsubishi RV-M1 se muestran a continuación en la tabla 1.
Tabla 1 . Características Robot Mitsubishi RV-M1
Fuente: Inventario Laboratorios de Tecnología Mecánica - Universidad Distrital- Francisco José de Caldas – Facultad Tecnológica.
4.4 ACCIONAMIENTOS FINALES
Los accionamientos finales según Leon14automatizados se pueden clasificar en dos grupos: las garras o pinzas no antropomórficas (figura 16) y las herramientas especializadas. Los robots industriales actuales emplean especialmente pinzas para mover objetos o realizar trabajos especializados, las garras son utilizadas para el capturar objetos por el área interna o externa, los mecanismos implementados para este tipo de manipuladores son diversos entre ellas las más utilizadas son:
• Mecanismos de manivela y guía de extensión. • Mecanismos de manivela y guía de retracción. • Mecanismos de dedos pivotantes mecanismos. • Mecanismos cuatro barras paralelas.
• Mecanismos de cuatro barras con piñón y cremallera.
14 Pedro Leon Simanca and Gabriel Calle T, ‘DEDOS PARA “GRIPPERS” ROBÓTICOS’, 2005, 97–102.
5 grados de libertad
5
Comandos de programación
63
Velocidad máxima
1 m/s
Posiciones 8 kb
629
Líneas de programación 16 kb
2048
Carga máxima
0,5 kg.
Programación
16 entradas; 16 salidas
45
• Mecanismos de cuatro barras con servo motor eléctrico.
FIGURA 16. Clasificación de accionamientos finales automatizados.
46
de un actuador es el elemento mecánico transformador de energía ya que es un mecanismo indispensable del mismo y es el encargado de transformar un determinado tipo de energía (eléctrica, neumática e hidráulica) en algún tipo de movimiento (Lineal o rotacional). Dependiendo del tipo de movimiento que el transformador de energía entrega es necesario que el actuador incorpore un sistema de transmisión de movimiento. Este se encarga tanto de cambiar el tipo de movimiento como de trasladar simplemente ese movimiento de un sitio a otro. Para analizar, el sistema de transformación de datos en eventos es el elemento que adquiere información exterior y la transforma de forma tal que se ven reflejadas como acciones que el actuador llevara a cabo Es importante aclarar que los datos que recibe el sistema de transformación de datos en eventos obtiene datos ya elaborados por un sistema central como un sistema de control o una unidad central de procesos.
FIGURA 17. Secuencias de trabajo de los actuadores.
47 4.5 TIPOS DE MOVIMIENTO
Según NORTON15 la clasificación y definición es la siguiente:
4.5.1. Rotación pura
Es la que ocurre cuando un cuerpo posee un punto (centro de rotación) que no tiene movimiento con respecto al marco de referencia “estacionario”. Todos los demás puntos del cuerpo describen arcos alrededor del centro. Una línea de referencia trazada en el cuerpo a través del centro cambia solo su orientación angular.
4.5.2 Traslación pura
Este es el movimiento más simple que puede hacer un cuerpo rígido. Es un cuerpo que tiene un movimiento de traslación pura si un segmento considerado sobre el cuerpo se mueve en el espacio manteniéndose paralelo a sí mismo. Todos los puntos en el dispositivo describen trayectorias paralelas (curvas o rectas). Una línea de referencia trazada en el cuerpo cambia su posición lineal pero no su orientación o posición angular.
4.5.3. Movimiento complejo
En este se presenta una combinación simultánea de rotación y translación. Cualquier línea de referencia trazada en el cuerpo cambiara tanto su posición lineal como su orientación angular. Los puntos en el cuerpo recorrerán trayectorias no paralelas, y habrá, en todo instante, un centro de rotación, el cual cambiará continuamente de ubicación.
4.6 Eslabones y cadenas cinemáticas 4.6.1 Eslabón
Cuerpo rígido (supuesto) que posee por lo menos dos nodos que son puntos de unión con otros eslabones; el número de nodos le da el nombre al eslabón, por ejemplo: binario= dos nodos, terciario=tres nodos, cuaternario=cuatro nodos etc.
48 4.6.2. Cadena cinemática
Un ensamble de eslabones y juntas interconectados de modo que produzcan un movimiento controlado en respuesta a un movimiento suministrado.
Elementos que componen una cadena cinemática
Manivela: Eslabón que realiza una revolución competa y esta pivotada a la bancada.
Balancín: Es un eslabón que tiene rotación oscilatoria (de vaivén) y esta
pivotado a la bancada
Acoplador o biela: Es un eslabón que tiene movimiento complejo y no esta
pivotado a la bancada
Bancada: Es cualquier eslabón o eslabones que están fijos (inmóviles) con respecto al marco de referencia.
4.6.3 Grados de libertad
El número de grados de libertad de un sistema es el número de parámetros (mediciones) independientes que se requieren para definir de manera única su posición en el espacio en cualquier instante de tiempo.
A continuación, se presenta la determinación del grado de libertad:
Mecanismo cerrado. No tendrá nodos con apertura y puede tener uno o más grados de libertad, como se muestra en la figura 18 (b).
49
FIGURA 18. Representación de mecanismo de cadena abierta y cerrada de un robot industrial.
a) Mecanismo de cadena abierta b) Mecanismo de cadena cerrada
Fuente: Tomado de ROBERT, L, NORTON, Diseño De Maquinaria. Mc Graw Hill, México (2009) 4ta edición.
Diada. Es una cadena cinemática abierta de dos eslabones binarios y una junta.
Ecuación de Gruebler:
𝑀 = 3𝐿 − 2𝐽 − 3𝐺 (4)
M= Número de grados de libertad L: Número de eslabones
J: Número de juntas
G: Número e eslabones fijados Ecuación de Kutzbach
𝑀 = 3(𝐿 − 1) − 2𝐽1 − 𝐽2 (5)
M= Número de grados de libertad. L: Número de eslabones.
50
4.7 PROGRAMA DE DISEÑO NX DE SIEMENS®
SIEMENS NX CAM® 16proporciona una amplia variedad de funcionalidades, desde la programación sencilla de control numérico hasta el mecanizado de eje múltiple, lo que permite a los programadores de control numérico llevar a cabo muchas tareas utilizando un único sistema. Gracias a la flexibilidad de SIEMENS NX CAM, se pueden realizar fácilmente trabajos muy complejos.
SIEMENS NX CAM dispone de un sistema de pos-proceso totalmente integrado. Entre los varios niveles de validación del programa de control numérico se incluye la simulación controlada por códigos G, que elimina la necesidad de contar con paquetes de simulación independientes. SIEMENS NX incorpora avanzadas herramientas CAD que el programador de control numérico puede utilizar para cualquier cosa: desde modelar nuevas piezas hasta crear planos de configuración directamente a partir de los datos del modelo en 3D.
4.7.1 Mechatronics Concept Designer de Siemens PLM
Es un Software específicamente diseñado para acelerar el concepto diseño para máquinas herramientas, el software permite el modelado 3D y la simulación de conceptos con física multi-cuerpo y comportamiento relacionado con la automatización, generalmente encontrado en productos mecatrónicos. La solución admite un nuevo enfoque para el diseño funcional de la máquina. Es muy funcional ya que, la descomposición sirve como un lenguaje común entre disciplinas, permitiéndoles trabajar en paralelo desde las primeras etapas de desarrollo de productos, también permite la reutilización de diseños existentes. El Diseñador de conceptos de mecatrónicos permite acelerar el desarrollo de productos, lo que proporciona trabajar en paralelo, aprovechando técnicas innovadoras que ayudan a los diseñadores a satisfacer las demandas de máquinas.
51
5 MODELADO DE LOS PROTOTIPOS DE GRIPPER PROPUESTOS EN LA PLATAFORMA NX DE SIEMENS®
5.1 Variables y parámetros necesarios para el modelado de los grippers. Para iniciar con los diseños de los prototipos de cada gripper iniciamos realizando una matriz QDF por las siglas inglesas de Quality Function Deployment, como método o herramienta de diseño de productos que nos facilita tener en cuenta las características técnicas y operativas satisfactorias a tener en cuenta para cada gripper, además es una manera de realizar la comparación para sacar un ponderado y un valor cuantitativo de los parámetros que ya se habían establecido, y de esta manera darle el grado de importancia a cada parámetro que va a ser tenida en cuenta para el modelado de cada pinza.
Decidimos calificar el grado de importancia de 1 a 5 donde 1 es lo menos importante, 5 muy importante y 3 aceptable como se muestra a continuación en la tabla 2:
Tabla 2 matriz QDF, evaluación de características de diseño de los prototipos de gripper.
OBJETIVOS A B C D E F G H I TOTAL
A 3 5 3 3 4 3 3 3 27
B 5 5 5 5 5 5 5 5 40
C 3 3 4 4 4 3 4 4 29
D 5 3 5 3 4 4 4 4 32
E 5 4 5 5 5 5 5 4 38
F 3 3 4 4 3 3 4 3 27
G
5 4 5 4 4 4 4 4 34
H 5 3 4 4 3 4 3 3 29
I 4 3 4 4 4 4 4 5 32
A El gripper sea más ligero.
B Que permita realizar la función de destapar y voltear
el recipiente de perlas
C Sea de bajo costo.
D Mantenimiento fácil en cada uno de sus
52
E Sea un equipo seguro.
F Fabricación y ensamble fáciles.
G Tenga estabilidad.
H Fácil de instalar.
I Realizable en un tiempo mínimo de fabricación, ensamble y prueba
FUNDAMENTALES IMPORTANTES A TENER EN CUENTA
Fuente: elaboración propia, matriz QDF.
Por otro lado, otro aspecto que se tuvo en cuenta para realizar el análisis del diseño fueron las medidas del tarro que iba a manipular el gripper, para darle el dimensionamiento a la hora de ser modelado, los parámetros de apertura, cierre, velocidades.
Además, se realizó un estudio de los recipientes contenedores de la celda de manufactura que se encuentran fabricados en un material plástico (41mm X 41mm X 52mm) con cuatro diferentes tipos de etiqueta (figura 19). Cada etiqueta incorpora un código de barras que permite identificar al producto a lo largo del proceso y dentro de los cuales se va llenando con las perlas de colores de acuerdo a la configuración que le sea establecida.
53
Fuente: Tomado de Suarez Gaona, Diseño De Maquinaria.
54
FIGURA 20. Representación de recipientes contendores al momento de la disposición de los cilindros sobre la plataforma de paletizado FMS HAS 200
Fuente: Tomado de Suarez Gaona Andrés Felipe
http://repository.udistrital.edu.co/bitstream/11349/4800/1/SuarezGaonaAndresFeli pe2016.pdf.
55
Figura 21. Montaje ensayo de laboratorio medición de fuerza necesaria para destapado de recipiente FMS HAS 200.
Fuente: elaboración propia.
Figura 22. Montaje ensayo de laboratorio medición de fuerza necesaria para destapado de recipiente FMS HAS 200.
56
Tabla 3 Resultados de ensayo de laboratorio para determinar la fuerza requerida para destapar los contenedores de perlas de la FMS HAS – 200.
Fuente: elaboración propia
Teniendo en cuenta que la variación de temperatura del medio ambiente es un factor para el correcto funcionamiento del gripper, debido a que depende de redes neumáticas, se tomó una presión de diseño del sistema 1.2 veces la de operación mayor (fuerza de 6.5); que es el factor de seguridad, es decir para este caso será de 7.8 N que se aproximó a 8N.
Además de esto, antes de hacer los modelados se tuvo en cuenta el dimensionamiento del robot Mitsubishi MovemasterRV-M1, como se muestra en la figura 23, donde se puede observar las medidas generales del brazo y de la parte en la que va ensamblado el efector final o gripper.
NÚMERO DE TARROS FUERZA 1 [N] FUERZA 2 [N] FUERZA 3 [N] FUERZA 4[N] FUERZA 5[N]
TARRO 1 5 5.2 5 5.2 5.2
TARRO 2 4.5 4.5 5 5.5 6
TARRO 3 5.5 5.5 6 6 6
TARRO 4 6 6 6.5 6.5 6.3
TARRO 5 5.2 5.2 5.5 5.5 5.5
TARRO 6 6 6 5.6 5.6 5.7
PROMEDIO 5.367 5.400 5.600 5.717 5.783
TABLA DE FUEZA NECESARIA PARA DESTAPAR UN TARRO DE LA HAS-200
FUERZA A USAR TENIENDO EN CUENTA EL
RESULTADO EXPERIMENTAL ES DE 8 N PARA TENER LA CERTEZA DE QUE VA A FUNCIONAR
57
FIGURA 23. Plano dimensiones de robot Mitsubishi Movemaster RM-V1
Fuente: Tomado de Suarez Gaona Andrés Felipe http://repository.udistrital.edu.co/bitstream/11349/4800/1/SuarezGaonaAndresFeli pe2016.pdf.
5.2 Modelado de los grippers en plataforma NX de Siemens®
Con ayuda de la aplicación de modelado CAD que ofrece la plataforma de NX de Siemens® se modeló cada pieza necesaria para generar el ensamble del gripper, teniendo en cuenta para su dimensionamiento, las medidas de los recipientes que va a manipular, y las medidas del manipulador robótico.
58
FIGURA 24. Ventana de selección entorno modelado en NX de Siemens®,
Fuente: elaboración propia.
Posteriormente aparece el entorno de modelado, en el que el primer paso a seguir es elegir la opción croquis para seleccionar el plano de trabajo en el que se realiza la pieza como se muestra en la figura 25.
FIGURA 25. Ventana de entorno modelado en NX de Siemens® opción croquis
59
Teniendo este plano se puede seleccionar alguna de las herramientas del menú que ofrece el software NX para dibujar las geometrías de cada elemento en 2D, como se muestra en la figura 26.
FIGURA 26. Herramientas geométricas 2D en NX de Siemens®,
Fuente: elaboración propia.
Luego de tener las figuras en 2D se realiza el modelado 3D usando las herramientas de extrusión, revolución, agujero y redondeos que se muestran en la figura 27 y figura 28.
FIGURA 27. Herramientas geométricas 3D en NX de Siemens®
60
FIGURA 28. Pieza modelada y extruida en NX de Siemens®
Fuente: elaboración propia.
Se realizó el modelado de cada uno de los prototipos que se habían propuesto. Al momento de modelar y antes de realizar las simulaciones se descartaron varios de los prototipos porque no cumplían con los requisitos que habíamos planteado por medio de la matriz QDF, además de no tener la geometría pertinente, también se descartó una de éstas porque la propuesta estaba centrada en el ámbito neumático, en este caso se pensó usar una fuente de alimentación por medio de vacío, pero sería no funcional puesto que se requeriría en la red de alimentación neumática de la Universidad Distrital Francisco José de Caldas – Facultad Tecnológica una capacidad suficiente para generar el vacío necesario para llevar a cabo el destapado del recipiente (8 N de fuerza requeridos) y adicionalmente un dispositivo de sujeción por vacío de especificaciones muy elevadas, como se explicó en el numeral 4.1.3.
5.3 Ensamble
61
la máquina, primero se abre el programa NX de Siemens®, luego se va a archivo – nuevo y seleccionamos la opción de New → Assembly, se da el nombre del archivo y en la carpeta en que se guarda y posteriormente se da aceptar, como se observa en la figura 29.
FIGURA 29. Entorno de ensamble en la plataforma de NX de Siemens®
Fuente: elaboración propia.
62
FIGURA 30. Entorno de ensamble para agregar componentes o piezas en la plataforma de NX de Siemens®
Fuente: elaboración propia.
63
FIGURA 31. Entorno de ensamble para poner restricciones de componentes o piezas y organizar el ensamble en la plataforma de NX de Siemens®,
Fuente: elaboración propia.
5.4 Diseñador de conceptos mecatrónicos para la simulación.
Para realizar la simulación se usó la plataforma de NX de Siemens®, con la aplicación de Mechatronics Concept Designer o diseñador de conceptos mecatrónicos, en el cual se pudo realizar la simulación en 3D de conceptos con comportamientos físicos y automatizados.
64
FIGURA 32. Entorno de diseñador de conceptos mecatrónicos para simulaciones del ensamble en la plataforma de NX de Siemens®,
Fuente: elaboración propia.
65
FIGURA 33. Opción de cuerpo rígido de diseñador de conceptos mecatrónicos para simulaciones del ensamble en la plataforma de NX de Siemens®,
Fuente: elaboración propia.
66
FIGURA 34. Opción de juntas de diseñador de conceptos mecatrónicos para simulaciones del ensamble en la plataforma de NX de Siemens®.
Fuente: elaboración propia.
67
FIGURA 35. Opción de control de posición de diseñador de conceptos mecatrónicos para simulaciones del ensamble en la plataforma de NX de Siemens®
Fuente: elaboración propia.
Con la ayuda de Mechatronics Concept Designer se creó un diseño basado en funciones que emula las interacciones de colaboración del diseño, es muy importante tener en cuenta que el modelo sea funcional para proporcionar la estructura de soporte para los conceptos de diseño iniciales y brindar la capacidad de realizar evaluaciones de alternativas de diseño.
68
6 EVALUACIÓN DE LOS PROTOTIPOS DE GRIPPER
SELECCIONADOS Y MODELADOS EN LA PLATAFORMA NX DE SIEMENS®.
6.1 Evaluación de las características de cada diseño con ayuda de la herramienta simulación avanzada.
Para esto se realizó un estudio de fuerza con ayuda de la herramienta de simulación avanzada del programa NX de Siemens®, en donde se toman piezas individuales seleccionando como material plástico de prueba el Acrilonitrilo Butadieno Estireno (ABS por sus siglas en inglés), ya que si se quisiera prototipar en la impresora 3D que existe en la Universidad Distrital Francisco José de Caldas – Facultad Tecnológica se usaría este tipo de material; además los resultados de la simulación fueron tomados del Software de acuerdo a las variables de entrada, que son fuerza, dimensiones del tarro y masa, valores que ya se tienen.
Se escogieron dos pinzas, a las que se le realizaron la simulación puesto que cumplían en mayor parte con los requerimientos necesarios, una de estas (gripper2) está dada por un accionamiento neumático, con desplazamiento angular que tiene un uso para superficies lisas o poco porosas como nuestros contenedores, que están fabricados de material plástico, es de tipo angular puesto que permite mover los “dedos” de una manera radial de manera que estos rotan alrededor de un punto de giro, teniendo en cuenta que para que funcione de la mejor manera el gripper debe sujetar el contenedor por su centro de gravedad cerca a éste para que se anulen los momentos que se pudieran generar por el peso del contenedor.