Levantamiento con RPAS del Predio Aguas Claras en el Municipio de Villavieja Huila
54
0
0
Texto completo
(2) Levantamiento con el Sistema de Aeronave Piloteada Remotamente (RPAS) del predio Aguas Claras en el Municipio Villavieja – HUILA. María Alejandra Guzmán Tunaroza Paula María Rincón González. Cód. 20132031048 Cód. 20132031027. Proyecto presentado en la modalidad de Monografía como requisito parcial para optar al título de Tecnólogo en Topografía. Director: Carlos Alfredo Rodríguez Rojas Ingeniero Topográfico. Universidad Distrital Francisco José de Caldas Facultad de Medio Ambiente y Recursos Naturales Tecnología en Topografía Bogotá D.C. 2017.
(3) Nota de aceptación: Acuerdo 29 de 1998. Reglamento estudiantil.. El comité de la Universidad Distrital Francisco José de Caldas aprueba el trabajo de grado titulado “LEVANTAMIENTO CON DRON DEL PREDIO AGUAS CLARAS EN EL MUNICIPIO VILLAVIEJA – HUILA”. ”. Lo anterior, en cumplimiento de los requisitos para obtener el título de Tecnólogos en Topografía.. Firma Director de proyecto Carlos Alfredo Rodríguez Rojas. Firma del Revisor. Firma Revisora de proyecto Janneth Pardo Pinzón.
(4) Bogotá D.C. 2017 Art. 117 "Ni la universidad ni el jurado serán responsables de las ideas expuestas por los estudiantes en el trabajo de grado".
(5) AGRADECIMIENTOS. Gracias a la Universidad Distrital por habernos proporcionado las herramientas para formarnos en ella, gracias a todos nuestros compañeros que fueron participes de la práctica de Geodesia Posicional de los períodos académicos 2016-3, 2017-1 y 2017-3, por la colaboración, la disposición, ya sea de manera directa o indirecta, gracias a todos, fueron los responsables de realizar este proyecto, que el día de hoy culmina de forma exitosa, y nos lleva un paso más a culminación de carrera universitaria. Gracias a nuestros padres, que fueron nuestro mayor apoyo y promotores durante todo el proceso, gracias a Dios, que fue nuestro principal apoyo y motivación para cada día. Este es un momento muy especial espero que contribuya o aporte con futuras investigaciones, también a los profesores quienes invirtieron su tiempo para guiarnos en este proceso..
(6) Resumen Se requiere la actualización cartográfica del predio Aguas Claras en el Departamento del Huila, municipio Villavieja por medio de la creación de un Ortomosaico obtenidas con tecnología RPAS (Remotely Piloted Aircraft), para delimitar el lindero del predio que cuenta con un área de 266 Ha. y obtener un Modelo Digital de Elevación de la zona y la digitalización de la misma según normas y parámetros establecidos por el IGAC y el (INCODER) ahora llamado Agencia Nacional de Tierras , esto referenciado por medio de posicionamiento GPS, ubicando 9 puntos de control distribuidos en el predio. El artículo 104 de la ley 1753 de 2015, plan nacional de desarrollo 2014 – 2018, “todos por un nuevo país”, estableció que el gobierno nacional promoverá la implementación de un catastro nacional con enfoque multipropósito, “…entendido como aquel que dispone información predial para contribuir a la seguridad jurídica del derecho de propiedad inmueble, al fortalecimiento de los fiscos locales, al ordenamiento territorial y a la planeación social y económica.”, siguiendo las normas técnicas del IGAC se requiere la validación del predio Aguas Claras en el Departamento del Huila, municipio de Villavieja, en la inspección san Alfonso. Los beneficios de realizar este tipo de Levantamiento están definidos por la variable tiempo y calidad que facilita y detalla la representación y precisión en los resultados, gracias a su tecnología con la que se obtienen mayor cantidad de datos del terreno, en comparación a otros métodos topográficos. Para obtener más información geográfica del predio más allá de la otorgada por catastro, y con ayuda de sus directivos, docentes y estudiantes encamina el proyecto de grado a realizar trabajos que permitan la recolección de información del estado actual de este predio, para que publique la información al público en general.. Palabras Claves: Ortofotografías, posicionamiento GPS, RPAS, PhotoScan, Leica Geo Office, kmz, Lindero..
(7) Abstract It is required the cartographic update of the property Aguas Claras in department of Huila, municipality Villavieja by means of creating of a Ortomosaic obtained with RPAS technology (Remotely Piloted Aircraft) in order to delimit the property boundary which has an area of 266 Ha, and to obtain a digital model of elevation of the zone and the digitalization of the same one according to the norms and parameters established by IGAC and INCODER actually named National Land Agency, this referenced by means of GPS positioning located 9 control points distributed on the property. Article 104 of law 1750 of 2015, national development plan 2014-2018 “all for a new country” established that the national government will promote the implementation of a land registry with focus multipurpose, “…understood as the one that provides property information to contribute to the legal security of property rights, strengthening of local tax authorities, landuse planning and social and economical planning”. Following the technical rules of IGAC is required the validation of the property Aguas Claras in department of Huila, municipality Villavieja in the village of San Alfonso. The benefits of making this kind of lifting are defined by the variable time and quality which facilitate and detail the representation and precision in the results, thanks to its technology with which more data is obtained from the ground in comparison with other topographical methods. To obtain more geographical information of the property beyond the one given by national land registry and with help of its managers, teachers and students, leads the graduation project to make works that allow the collection of information on the current status of this property, thus, the information is published to the public in general.. Key words: Orthophotos, GPS positioning, RPAS, PhotoScan, Leica Geo Office, kmz, boundary..
(8) Tabla de Contenido 1. Introducción ......................................................................................................... 12 2. Objetivos .............................................................................................................. 13 2.1. Objetivo General ...................................................................................... 13. 2.2. Objetivos Específicos ............................................................................... 13. 3. Marco Teórico ...................................................................................................... 14 3.1. Levantamiento Topográfico ...................................................................... 14. 3.1.1. Levantamiento Topográfico con fines Catastrales .................................. 14. 3.1.2. Procedimiento en Oficina ........................................................................ 14. 3.1.3. Procedimiento en Campo para Levantamientos Catastrales .................. 14. 3.2. Sistema de Posicionamiento Global (GPS) .............................................. 15. 3.2.1. Funcionamiento ...................................................................................... 15. 3.2.2. Posicionamiento con GPS ...................................................................... 16. 3.2.3. Estático Rápido....................................................................................... 16. 3.2.4. Sistema de Proyección ........................................................................... 16. 3.3. Tecnología RPAS (Remotely Piloted Aircraft System) ............................. 16. 3.3.1. Reglamentación en Colombia para el uso de la tecnología RPAS ......... 17. 3.4. Equipos Topográficos .............................................................................. 17. 3.4.1. GPS Topográfico de alta Precisión TOPCON HIPER LITE+ .................. 17. 3.5. Dron eBee ................................................................................................ 17. 3.5.1. Productos de eBee: ................................................................................ 18. 3.5.2. Agencia Nacional de Tierras (INCODER) ............................................... 18. 4. Metodología ......................................................................................................... 19 4.1. Planeación del Proyecto .......................................................................... 20. 4.1.1. Plano INCORA de 1993 .......................................................................... 20. 4.1.2. Antecedentes del Predio proporcionados por el IGAC ........................... 20. 4.1.3. Ubicación de los Puntos de Control de Terreno ..................................... 21.
(9) 4.1.4. Planeación del Vuelo .............................................................................. 22. 4.1.5. Estación Permanente y Vértices ubicadas en el Predio ......................... 24. 4.2. Trabajo de Campo ................................................................................... 24. 4.2.1. Visita de la Zona y Reconocimiento del Punto de Amarre ...................... 24. 4.2.2. Posicionamiento Punto de Amarre ......................................................... 27. 4.2.3. Materialización de Puntos de Control ..................................................... 27. 4.2.4. Posicionamiento con GPS ...................................................................... 28. 4.2.5. Ejecución del Vuelo ................................................................................ 29. 4.3. Trabajo de Oficina .................................................................................... 30. 4.3.1. Geo- Etiquetado de las Fotografías ........................................................ 30. 4.3.2. Procesamientos de datos tomados en Campo ....................................... 31. 4.3.3. Procesamiento en Agisoft PhotoScan .................................................... 34. 4.3.4. Vectorización del Predio ......................................................................... 38. 4.3.5. Filtrado de los Puntos del Terreno .......................................................... 39. 5. Resultados ........................................................................................................... 41 5.1. Levantamiento con GPS .......................................................................... 41. 5.2. Modelo Digital de Terreno ........................................................................ 41. 5.3. Ortomosaico ............................................................................................. 42. 5.3.1. Coordenadas de Puntos de Control........................................................ 43. 5.4. Producto FotoIndice ................................................................................. 43. 5.5. Cartografía Digital .................................................................................... 44. 6. Análisis de Resultados......................................................................................... 46 6.1. Puntos de Lindero .................................................................................... 46. 6.2. Actualización de la Información del Lindero ............................................. 46. 6.3. Características de la Vectorización .......................................................... 47. 6.4. Perfil ......................................................................................................... 48. 7. Conclusiones ....................................................................................................... 49.
(10) 8. Recomendaciones ............................................................................................... 50 9. Glosario ............................................................................................................... 51 10.. Bibliografía........................................................................................................ 52. 11.. Anexos ............................................................................................................. 54. Índice de Figuras Figura 1 GPS HiperLite+ .......................................................................................................... 17 Figura 2 eBee SenseFly .............................................................................................................. 18 Figura 3 Metodología Levantamiento del predio Aguas Claras con RPAS .............................. 19 Figura 4 Plano predio Aguas Claras de 1993 ........................................................................... 20 Figura 5 Shape de Catastro del Predio definido por el IGAC ................................................... 21 Figura 6 Ubicación de los GCP dentro del Predio .................................................................... 22 Figura 7 Planeación Vuelos ....................................................................................................... 22 Figura 8 Estación Permanente TCAO........................................................................................ 24 Figura 9 Vértices del Predio Aguas Claras ............................................................................... 25 Figura 10 Vértice Aguas Claras 2015........................................................................................ 25 Figura 11 Vértice Señal de Azimut ............................................................................................. 26 Figura 12 Posicionamiento del Vértice Base ............................................................................. 27 Figura 13 Localización y Materialización de GCP ................................................................... 28 Figura 14 Posicionamientos de GCPs y Puntos de Lindero ...................................................... 28 Figura 15 Ejecución del Vuelo ................................................................................................... 29 Figura 16 Vuelo 1 Geo-Etiquetado ............................................................................................ 30 Figura 17 Vuelo 2 Geo-Etiquetado ............................................................................................ 30 Figura 18 Línea de vuelo y ubicación de las Fotografías.......................................................... 31 Figura 19 GCP ajustados en Leica Geo Office .......................................................................... 31 Figura 20 Puntos del Lindero Post-Procesados ........................................................................ 32 Figura 21 Cálculo de Velocidades ............................................................................................. 32 Figura 22 Transformación de coordenadas a Planas Cartesianas ........................................... 34 Figura 23 Orientación de las Fotografías en PhotoScan .......................................................... 34 Figura 24 Cambio de Coordenadas de las imágenes en PhotoScan ......................................... 35 Figura 25 Nube densa de Puntos en PhotoScan ........................................................................ 35 Figura 26 Modelo Digital de Elevación creado por PhotoScan ................................................ 36 Figura 27 Ortomosaico editado en PhotoScan .......................................................................... 36 Figura 28 Geodatabase CVC ..................................................................................................... 38 Figura 29 Vectorización del Predio sobre el Ortomosaico ....................................................... 38 Figura 30 División de Bloques Nube de Puntos Densa ............................................................ 39 Figura 31 Parámetros secciones MicroStation .......................................................................... 40 Figura 32 Clasificación terreno ................................................................................................. 40 Figura 33 Modelo Digital de Elevaciones de los Puntos Filtrados ........................................... 41 Figura 34 Modelo Digital de Elevaciones ................................................................................. 42.
(11) Figura 35 Ortomosaico .............................................................................................................. 42 Figura 36 Fotoíndice en Google Earth ...................................................................................... 43 Figura 37 Plano Delimitación del Lindero Levantado en Campo ............................................. 44 Figura 38 Plano Comparativo de los Linderos del Área de Estudio ......................................... 45 Figura 39 Plano Vectorización del Predio................................................................................. 45 Figura 40 Imagen Raster de Elevación ...................................................................................... 48 Índice de Tablas. Tabla 1 Características del Predio ............................................................................................ 20 Tabla 2 Características Simulación de Vuelo ............................................................................ 23 Tabla 3 Coordenadas Vértice Aguas Claras 2015 ..................................................................... 26 Tabla 4 Coordenadas Vértice Señal de Azimut .......................................................................... 26 Tabla 5 Características generales del vuelo .............................................................................. 29 Tabla 6 Sistema Local San Alfonso Huila .................................................................................. 33 Tabla 7 Coordenadas Cartesianas de los Puntos de Control .................................................... 43 Tabla 8 Estadística descriptiva de la precisión de los puntos Postprocesados ......................... 46 Tabla 9 Áreas de los diferentes polígonos del lindero del predio .............................................. 47 Tabla 10 Descripción Características de la Vectorización ....................................................... 47.
(12) 12. 1. Introducción Algunos de los avances más importantes que permiten la captura de la información terrestre, corresponde a el desarrollo de la fotografía aérea y la obtención de imágenes satelitales, estas han presentado un gran progreso tecnológico en los últimos años los cuales han contribuido en gran medida a que las técnicas de trabajo en cartografía estén en constante evolución. La implementación del vehículo aéreo no tripulado (RPAS) más conocido como dron, para Colombia (Aeronave Pilotada a Distancia), dentro de un trabajo topográfico juega un papel muy importante ya que este es uno de los diversos medios para obtener fotografías aéreas y posteriormente obtener ortofotografías que sirven como complemento a información tomada en campo por medio de un levantamiento topográfico. Este sistema permite obtener mediciones con mayor rapidez y de manera más económica. Según especificaciones dictaminadas por el IGAC, el levantamiento se realiza a partir de ortofotos que permiten la fotoidentificación en campo de los linderos y vértices de los predios, se determinan las coordenadas de los mismos una vez realizada su digitalización. La digitalización de la información predial se puede realizar en campo con el apoyo de herramientas de captura digital de información en campo (tipo GIS), o en oficina mediante la digitalización sobre pantalla. En cualquiera de los dos casos se recomienda llevar una copia análoga de la ortofotografía de forma que los reconocedores puedan observar el conjunto de predios y los detalles arcifinios de ubicación en ella. Si la digitalización se hace en campo el fotoidentificador realiza el delineado de linderos en el instrumento digital, caso contrario delineará los detalles sobre la ortofoto en papel, para su posterior digitalización usando software especializado. Este método se debe complementar con la determinación de puntos con GNSS, colocados en campo. Por último, con el post proceso de puntos de Control, el Ortomosaico y el Modelo digital de terreno se realizará el plano del Predio en AutoCAD. Este último proceso debe cumplir parámetros determinados por el INCODER actualmente llamado Agencia Nacional de Tierras..
(13) 13. 2. Objetivos 2.1. Objetivo General. Obtener la cartografía del predio Aguas Claras por medio del vuelo con tecnología RPAS de aproximadamente 266 Hectáreas ubicado en el Municipio de Villavieja en el Departamento del Huila. 2.2. Objetivos Específicos. Obtener las coordenadas del lindero mediante posicionamientos con GPS. Generar el Ortomosaico de las imágenes RGB obtenidas del vuelo con tecnología RPAS. Vectorizar la cartografía digital del predio Aguas Claras. Comparar el método utilizado en este proyecto (Tecnología RPAS) para la obtención de datos y los métodos convencionales en topografía..
(14) 14. 3. Marco Teórico 3.1. Levantamiento Topográfico. La topografía es un conjunto de principios y procedimientos que tienen por objeto la representación gráfica de una parte de la superficie terrestre, esta representación tiene lugar sobre superficies planas, limitándose a pequeñas extensiones de terreno. (José Roberto Martínez Mejía, 2009) Para realizar un levantamiento topográfico es necesario primero, conocer la finalidad del levantamiento, segundo, seleccionar el método y elegir los instrumentos, tercero, realizar el trabajo de campo, por último, elaborar cálculos a partir de los datos de campo y el respectivo plano. (Luis E. BiI León, 1987) 3.1.1 Levantamiento Topográfico con fines Catastrales Para cumplir con el aspecto físico del catastro se deben realizar los levantamientos topográficos con propósitos catastrales tanto de los terrenos como las construcciones existentes, que contenga como información de importancia, las coordenadas, distancias de los lados de los inmuebles, entre otros. (Instituto Geográfico de Venezuela Simón Bolívar & Ministerio del Poder Popular para el Ambiente, 2011) 3.1.2 Procedimiento en Oficina La recopilación de información básica tanto técnica como logística constituye la primera fase en esta etapa de planificación; en cuanto a la información técnica, esta incluye la recopilación de cartas topográficas, planos, ortofotos, inventario de la red geodésica del país a una escala adecuada que cubra la zona de trabajo; así como tener en cuenta las especificaciones del proyecto, así como las tolerancias permitidas. (Raquel Pachas L., 2009) 3.1.3 Procedimiento en Campo para Levantamientos Catastrales • Realizar un reconocimiento de la zona e inmueble a levantar, ubicando además los puntos de apoyo para el levantamiento. • Ubicar en el inmueble la ubicación o distribución de nuevos puntos de apoyo para el levantamiento, considerando las distancias, accesos a los vértices o linderos, construcciones. • Instalar el equipo y prepararlo para las observaciones o mediciones. Anotando las alturas del instrumento. • Iniciar las mediciones. • Controlar y verificar errores en los resultados..
(15) 15. • Dibujo y cálculo de áreas. (Instituto Geográfico de Venezuela Simón Bolívar & Ministerio del Poder Popular para el Ambiente, 2011) 3.2. Sistema de Posicionamiento Global (GPS). Sistema compuesto por una red de 24 satélites operativos orbitando alrededor de la Tierra y unos receptores GPS (que son los instrumentos que realmente llevamos encima) que permiten determinar nuestra posición en cualquier lugar de nuestro planeta, dicho sistema está apoyado por unas estaciones de control terrestres, coordinado todo por un centro de Control. («Uso de Sistema de Posicionamiento Global», s. f.) 3.2.1 Funcionamiento Los receptores GPS (un receptor GPS solo recibe señales, no envía ningún tipo de ellas) reciben, a través de su antena, las señales de radio enviadas por los satélites y las procesan, de tal manera, que van recibiendo los datos de la posición en el espacio de cada uno de los satélites, el tiempo exacto en UTC (Universal Time Coordinated) de cuando fue enviada esa información, información de las órbitas y de los otros satélites de la red. («Uso de Sistema de Posicionamiento Global», s. f.) De esta manera el receptor GPS va recibiendo las señales de los satélites por orden de intensidad y cuando capta al menos 3 de ellos entonces puede conocer la distancia a cada uno de los mismos (ya que conoce la posición y el tiempo que ha tardado la señal en propagarse a la velocidad de la luz). («Uso de Sistema de Posicionamiento Global», s. f.) Los satélites transmiten la información en dos frecuencias: • Frecuencia portadora L1, a 1575.42 MHz., transmite los códigos C/A y P. • Frecuencia portadora L2, a 1227.60 MHz., transmite información militar modulada en código P. (Raul Moreno Chiroque & Cesar Giron Salazar, 2011) Y calcula la propia posición en la Tierra mediante un cálculo parecido a la triangulación (se consideran más factores y parámetros). La constelación de satélites ha sido diseñada para poder ver en circunstancias normales como mínimo 4 satélites en cualquier lugar del mundo, por lo que la señal de un cuarto satélite permite tener más precisión en los cálculos y saber también la altitud. («Uso de Sistema de Posicionamiento Global», s. f.) La medición con GPS es un método diferencial, el cual consiste en observar y calcular una línea base entre dos receptores. Cuando estos dos receptores observan el mismo conjunto de satélites en forma simultánea, los efectos atmosféricos se anulan en gran parte. Por lo tanto, entre más corta sea la línea base, mayor será la probabilidad de que la transmisión de señales a los dos receptores resulte en condiciones atmosféricas idénticas. (Leyca Geosystem, s. f.).
(16) 16. 3.2.2 Posicionamiento con GPS Una estación de referencia de operación continúa CORS (Continuously Operation Reference Station), es un equipo GPS o GNSS, compuesto por receptor, antena y accesorios, protegido y ubicado en un punto que, emplazado con precisión, rastrea Y almacena datos sin interrupciones. Puede equiparse para radiodifundir correcciones de tiempo real diferencia. Se almacenan grupos de datos diariamente para uno en procesamiento GPS y estos datos pueden ser descargados por la web, incrementa la eficacia del GPS en Geodesia y Cartografía. Debe incluirse y formar parte en una red de geodesia nacional. Opera de forma continua con un intervalo de registro estándar (por ejemplo 15 y 30 segundos), en forma automática en la descarga de datos, conversión al formato RINEX y puesta en un servido que puede ser descargado por cualquier usuario. (Juan Sebastián Cardozo Rojas & Jeniffer Alexandra Arenas Acosta, 2016) 3.2.3 Estático Rápido Los levantamientos Estático Rápidos se caracterizan por tiempos de observación cortos. Para este tipo de mediciones es particularmente importante que las condiciones atmosféricas sean las mismas en las dos estaciones. Por lo anterior, en todos los levantamientos GPS, en particular los efectuados con el método Estático Rápido, es conveniente que la longitud de las líneas base sea lo más corta posible. Un tiempo de observación demasiado corto, una geometría desfavorable de los satélites (GDOP) o las perturbaciones atmosféricas fuertes pueden en efecto producir resultados que exceden las especificaciones, aunque las ambigüedades hayan sido resueltas por el programa de postproceso. (Leyca Geosystem, s. f.) 3.2.4 Sistema de Proyección La mayoría de los proyectos requieren la transformación de coordenadas WGS84, obtenidas a partir de levantamientos con GPS, a un sistema local de coordenadas, es decir a coordenadas planas de la proyección local basada en el elipsoide local. (Leyca Geosystem, s. f.) 3.3. Tecnología RPAS (Remotely Piloted Aircraft System). RPA se refiere a la aeronave en sí misma o comúnmente denominado Dron, mientras que RPAS se refiere a todo el conjunto de componentes y dispositivos necesarios, y también complementarios, para operarla. («Drones: RPA y RPAS», 2014) Aunque inicialmente fueron creados para fines militares, debido a que no se exponía la vida de los militares y se podían realizar operaciones eficaces y silenciosas, en la actualidad su campo de acción es amplio, ya que tienen usos como Topografía aérea, Cartografía aérea, catastro, Vigilancia policial, Monitoreo de líneas de energía, oleoductos y gaseoductos,.
(17) 17. Fumigaciones, Minería, agricultura, geología, medio ambiente y usos militares, entre otros. (Gema Sánchez Jiménez, Manuel Mulero Valenzuela, & Erich Saumeth Cadavid, 2013) 3.3.1 Reglamentación en Colombia para el uso de la tecnología RPAS El 8 de septiembre del 2015 la aeronáutica civil emitió la circular reglamentaria N°002 que da las pautas para el proceso de reglamentación definitivas de las aeronaves pilotadas a distancia (RPAS con fines diferentes a recreativos y deportivos). («Reglamentación de drones o RPAS en Colombia (oficial Aerocivil)», 2015) 3.4. Equipos Topográficos. 3.4.1 GPS Topográfico de alta Precisión TOPCON HIPER LITE+ El Equipo GPS utilizado para trabajos de topografía de precisión marca Topcon utilizado para realizar el trabajo de campo en el predio Aguas Claras se muestra en la siguiente figura. Figura 1 GPS HiperLite+. Fuente Propia. (2016). Noviembre de 2016. San Alfonso, Huila.. 3.5. Dron eBee. El paquete del eBee contiene todo lo que necesita para comenzar a cartografiar: una cámara RGB de alta resolución, baterías, un modem de radio y nuestro el software de planificación y control de vuelo eMotion. Después solo tendrá que procesar y analizar las imágenes del eBee con un software profesional como el Pix4Dmapper o Agisoft PhotoScan. (eBee SenseFly, 2017).
(18) 18. Figura 2 eBee SenseFly. Fuente Propia. (2016). Noviembre de 2016. San Alfonso, Huila.. 3.5.1 Productos de eBee: El gestor de datos de eMotion pre-procesa, geo etiqueta y organiza sus imágenes de vuelo. Puede transformar las imágenes aéreas de alta resolución del eBee en un orto mosaico georreferenciado (también conocido como orto fotografía), en formato(s): geoTIFF, teselas KML (png/kml) Ejemplos de aplicación: Mapas base, mediciones en 2D, catastros, planificación urbana, de infraestructuras o de transportes, ingeniería forestal, marketing. Muestra una superficie continua que incluye la parte superior de objetos y estructuras como árboles y edificios (incluye también la tierra desnuda cuando nada la oculta), en formato(s) geoTIFF. Constan de millones de puntos individuales, cada uno de los cuales tiene asignadas coordenadas X, Y, Z y un valor RGB, Formato(s): las, laz, ply, ASCII. (SenseFly Company, s. f.) 3.5.2 Agencia Nacional de Tierras (INCODER) En el 2003 el INCODER actualmente llamado Agencia Nacional de Tierras heredó los fondos acumulados de varias entidades liquidadas y adquirió la responsabilidad de conservarlos, salvaguardarlos y organizarlos. Por esta razón la entidad tiene la obligación de entregar archivos no solo de su gestión de los últimos trece años, sino de entidades liquidadas que le precedieron. Precisó que en su archivo reposa información que data desde 1963 hasta 2010 y que contiene la “documentación producida en la gestión y resultado de las funciones asignadas a las siguientes entidades: Instituto Colombiano de Desarrollo Rural INCORA, Fondo de Cofinanciación para la Inversión Rural DRI, Instituto Nacional de Pesca y Acuicultura INPA, Instituto de Hidrología, Meteorología y Adecuación de Tierras, HIMAT, Instituto Nacional de Adecuación de Tierras INAT, Unidad Nacional de Tierras Rurales UNAT y el Instituto Colombiano de Desarrollo Rural INCODER”… “la gestión del INCODER en materia de archivos logró centralizar la totalidad de archivos rurales en la ciudad de Bogotá garantizando trazabilidad, seguridad y conservación de los mismos que frente al panorama actual se convertirán en la base de las políticas rurales del país”. (Gloria Stella Ortiz Delgado, 2017).
(19) 19. 4. Metodología Con motivo de cumplir con el objetivo general para la producir la ortofotografía, se propone una metodología que permita garantizar el resultado conforme a la necesidad del proyecto, sustentando esta metodología en los resultados obtenidos de pruebas realizadas con las fotografías aéreas tomadas sobre la línea de vuelo hecha con el polígono obtenido del IGAC el cual nos define el lindero del predio. Con fin de evaluar las zonas de estudio, se desarrollaron una serie de actividades en donde el trabajo realizado en campo define los resultados desarrollados en oficina.. La planeación del proceso en campo y la colaboración de las personas que conocen el terreno es clave para obtener resultados más rigurosos, debido al extenso terreno y zonas de difícil acceso. El proceso en oficina está encaminado a dar resultados a los objetivos del proyecto y supervisado por profesores con conocimiento en todos los aspectos referentes al postproceso de información. Figura 3 Metodología Levantamiento del predio Aguas Claras con RPAS. Fuente Propia. (2016). Bogotá D.C..
(20) 20. 4.1. Planeación del Proyecto. Para llevar a cabo el Levantamiento Topográfico del predio se requiere información que permita conocer las características generales del predio, para ello se reunieron los datos existentes que se presentan a continuación. 4.1.1 Plano INCORA de 1993 El plano de 1993 generado por el Incora fue entregado por el dueño del predio, escaneado y digitalizado. Figura 4 Plano predio Aguas Claras de 1993. Fuente INCORA. (1993). 4.1.2 Antecedentes del Predio proporcionados por el IGAC Tabla 1 Características del Predio. CARACTERÍSTICAS. DESCRIPCIÓN. DEPARTAMENTO. 41 – HUILA. MUNICIPIO. 872 – VILLAVIEJA. CÓDIGO PREDIAL NUEVO. 418720002000000070001000000000. CÓDIGO PREDIAL ANTERIOR. 41872000200070001000. MATRÍCULA INMOBILIARIA. 200-107580. DESTINO ECONÓMICO. Agropecuario. DIRECCIÓN. EL AREPAL. ÁREA DE TERRENO. 266 Ha, 7599 m2.
(21) 21. ÁREA CONSTRUIDA. 120 m2. Información general del predio obtenida de la dependencia de catastro de la página Web del Instituto Geográfico Agustín Codazzi.. El lindero del predio según catastro se obtuvo en formato .shp, en la Figura 4 se observa la forma definida de este. Figura 5 Shape de Catastro del Predio definido por el IGAC. Fuente Gobla mapper. (2016). 4.1.2.1 Colindancia Al occidente colinda con el predio SAN LUIS DE AHORCADOS Y MIRAFLORES, su respectiva matrícula inmobiliaria es 200-0015439, que cuenta con un área de 202 Ha o 1904 m2. Al sur limita con el predio LAS ARCINIEGAS Y EL BALSO de matrícula inmobiliaria 206-6864, con un área de 106 Ha o 8750 m2. Al oriente colinda con el Río Cabrera. Y al norte colinda con el predio EL AZAFRAN, con su matrícula inmobiliaria 20066462 y un área de 47 Ha o 7999 m2. 4.1.3 Ubicación de los Puntos de Control de Terreno Tomando como base el shape del predio según Catastro Nacional, se procedió a subir el kmz en Google Earth para así determinar el límite del proyecto y definir la ubicación de los puntos de control de terreno teniendo en cuenta los sitios en los que está más despejado de vegetación y queden distribuidos abarcando el terreno uniformemente..
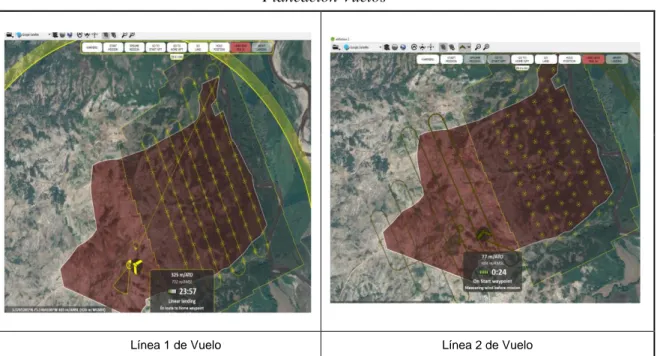
(22) 22. Figura 6 Ubicación de los GCP dentro del Predio. Fuente Google Earth. (2016). 4.1.4 Planeación del Vuelo En el software eMotion 2 se cargó el Kml del predio y se generaron dos rutas de vuelo según la forma irregular del lindero del predio. Figura 7 Planeación Vuelos. Línea 1 de Vuelo. Línea 2 de Vuelo. Fuente eMotion 2. (2017).
(23) 23. Las características de la simulación del vuelo se presentan en la siguiente tabla: Tabla 2 Características Simulación de Vuelo Características. Resultados. Posición. N 3.37907413° W 75.1433126°. Radio Área de Trabajo. 2000 m. Altura de trabajo. 400 m/ATO. GSD. 12 cm/px. Traslapo Longitudinal. 75%. Traslapo Transversal. 70%. Datos de Vuelo Número de Vuelos. 2. Tiempo de Vuelo. 2x00:26:30. Máximo Tiempo de Vuelo. 30 min. Distancia Total de Vuelo. 37.3 km. Cobertura Total de Terreno. 235.4 ha. Número de Líneas de Vuelo. 17. Espaciado de Líneas de Vuelo. 144 m. Altitud media de la Línea de Vuelo sobre los datos de Elevación. 355 m (12.4 cm/px). Altitud Máxima de la Línea de Vuelo sobre los datos de Elevación. 387 m (13.5 cm/px). Altitud Mínima de la Línea de Vuelo sobre los datos de Elevación. 318 m (11.1 cm/px). Datos de Cámara Tipo de Cámara. S110 RGB. Número Total de Fotos. 192. Cobertura de una sola Imagen. 480x360 m. Distancia entre Fotos. 90 m. Número de Waypoints. 21. Información obtenida en la simulación de Vuelo realizada en eMotion 2. Trabajo de Campo..
(24) 24. 4.1.5 Estación Permanente y Vértices ubicadas en el Predio Una de la Estaciones Permanentes que conforma la Red Nacional Activa de Estaciones Permanentes Geodésicas Satelitales GPS con propósitos geodinámicos (INGEOMINAS, 2009), está ubicada dentro del predio, denominada TCOA90. Figura 8 Estación Permanente TCAO90. Fuente propia. (Mayo de 2016). San Alfonso, Huila.. Desde esta estación fueron posicionados los vértices Aguas Claras 2015 y Señal de Azimut con posicionamiento de primer orden. Las coordenadas de los vértices fueron determinadas por INGEOMINAS. 4.2. Trabajo de Campo. 4.2.1 Visita de la Zona y Reconocimiento del Punto de Amarre Con el fin de adquirir información previa para la ejecución del trabajo de campo, se realizó la visita de la zona el 24 de noviembre de 2016, localizando el vértice de amarre, información que fue suministrada por el Ing. Carlos Rodríguez para el trabajo en campo. En la caminata por el predio se observó las características del predio y la cerca que delimita la mayor parte del lindero..
(25) 25. 4.2.1.1 Vértices de Amarre Se utilizó como base para ejecutar el levantamiento topográfico los vértices ubicados dentro del predio. Figura 9 Vértices del Predio Aguas Claras. Fuente Goorgle Earth Pro. (2017). Figura 10 Vértice Aguas Claras 2015. Fuente propia (Noviembre del 2017). San Alfonso, Huila..
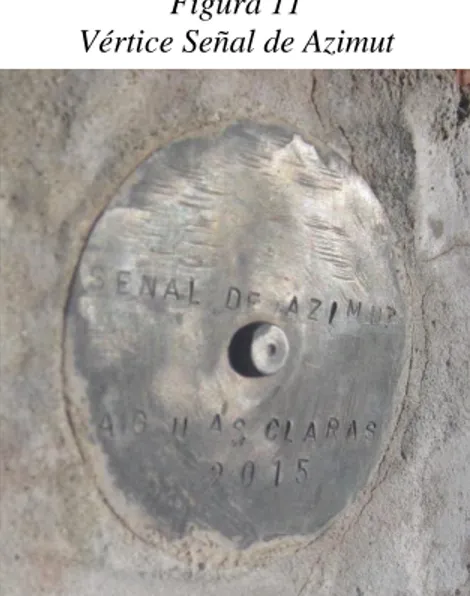
(26) 26. Tabla 3 Coordenadas Vértice Aguas Claras 2015. Información Vértice Materializado Latitude. 3°22’49.20275”. Longitude. 75°8’42.26436”. Ellipsoidale Height. 431.347. Geoidal Height. 411.76. Coordenadas Geográficas del vértice ubicado dentro del predio, Época 2016, 6. ITRF 84. Proyección MAGNA SIRGAS. Dátum WGS84.. Figura 11 Vértice Señal de Azimut. Fuente propia (Mayo del 2017). San Alfonso, Huila.. Tabla 4 Coordenadas Vértice Señal de Azimut. Información Vértice Materializado Latitude. 3°22’37.57218’’. Longitude. 75°8’48.53583’’. Ellipsoidale Height. 432.237. Geoidal Height. 412.654. Coordenadas Geográficas del vértice ubicado dentro del predio, Época 2016, 6. ITRF 84. Proyección MAGNA SIRGAS. Dátum WGS84..
(27) 27. 4.2.2 Posicionamiento Punto de Amarre El posicionamiento del vértice Señal de Azimut se realizó los días 21 y 22 de mayo con GPS Hiperlite+ y GR5 marca Topcon de doble frecuencia, se posicionó 4 horas y 35 minutos y 5 horas respectivamente, tiempo correspondiente a la duración que se tuvo mientras se leían los vectores hacia cada punto de lindero. Para complementar datos del lindero, se vuelve a posicionar el 1 y 2 de diciembre puntos cerca al río que faltaban, tomando como base el vértice Aguas Claras 2015. Figura 12 Posicionamiento del Vértice Base. Fuente propia. (Noviembre del 2016). San Alfonso, Huila.. 4.2.3 Materialización de Puntos de Control El día 21 de mayo de 2017, con las coordenadas obtenidas de Google Earth de los Puntos de Control se localizaron y se materializaron 9 puntos con ayuda de Navegadores Garmin Oregon 650..
(28) 28. Figura 13 Localización y Materialización de GCP. Materialización GCP. Punto de control (GCP) N° 1. Punto de control (GCP) N° 2. Fuente propia. (Mayo de 2017). San Alfonso, Huila.. 4.2.4 Posicionamiento con GPS El levantamiento del lindero se realizó con equipos GPS Hiperlite+ y GR5 por el método Estático rápido, el tiempo de grabación de cada punto fue de 5 minutos, posicionando también los puntos de control de 10 a 15 minutos para la georreferenciación posterior del Ortomosaico; adicionalmente se tomaron puntos por los caminos transitados de alrededor de un minuto. Figura 14 Posicionamientos de GCPs y Puntos de Lindero. Posicionamiento GCP. Punto de Lindero.. Punto de Lindero..
(29) 29. Fuente propia. (Mayo de 2017). San Alfonso, Huila.. 4.2.5 Ejecución del Vuelo El vuelo se realizó el día 22 de mayo del 2017 con el Dron eBee, que gracias a su diseño puede cubrir áreas de gran tamaño en un solo vuelo con un muy bajo GSD (eBee SenseFly, 2017). Debido al clima lluvioso se interrumpió la línea de vuelo, dividiendo está en dos. Del primer vuelo se obtuvieron 46 fotografías y del segundo 53. Figura 15 Ejecución del Vuelo. Dron eBee. Piloto. Fuente propia. (Mayo de 2017). San Alfonso, Huila.. Las características generales que determinaron parámetros del vuelo se pueden evidenciar en la siguiente tabla: Tabla 5 Características generales del vuelo. Características. Resultados. Altura de Vuelo. Alrededor de los 480m/ATO. Recubrimiento Longitudinal. 70%. Recubrimiento Transversal. 70%. GSD (Tamaño de píxel). 12 cm/px. Información obtenida gracias a los parámetros definidos en campo por el software eMotion 2..
(30) 30. 4.3. Trabajo de Oficina. 4.3.1 Geo- Etiquetado de las Fotografías El proceso de Geo-Etiquetado de las imágenes se hace en el software eMotion 2 disponiendo de dos archivos, la caja negra del vuelo y el log, cuando se cargan en el programa se visualiza la línea de vuelo y la posición de las imágenes y se descargan cuatro tipos de archivos (entre ellos un. kml) y cada imagen con coordenadas geográficas. Figura 16 Vuelo 1 Geo-Etiquetado. Fuente eMotion 2. (2017).. Figura 17 Vuelo 2 Geo-Etiquetado.
(31) 31. Fuente eMotion 2. (2017).. Se obtuvieron las imágenes georreferenciadas, listas para ver la posición de las fotografías en la línea de vuelo en que fueron tomadas en Google Earth. Figura 18 Línea de vuelo y ubicación de las Fotografías. Vuelo N° 1. Vuelo N° 2 Fuente Google Earth. (2017).. 4.3.2 Procesamientos de datos tomados en Campo En el software Leica Geo Office versión 8.3 se procesaron los Rinex de los GCP tomados en campo y se amarraron al vértice definido como Base con coordenadas conocidas. Figura 19 GCP ajustados en Leica Geo Office.
(32) 32. Fuente Leica Geo Oficce. (2017).. Luego se subieron los puntos del lindero y se procesaron amarrándose a la Base. Figura 20 Puntos del Lindero Post-Procesados. Fuente Leica Geo Oficce. (2017).. Con estas coordenadas se hallan las velocidades de cada punto en el programa Magna Pro3 y se calculan las coordenadas en la época de referencia 1995.4. Figura 21 Cálculo de Velocidades.
(33) 33. Fuente Magna Pro3. (2017).. Esto con el fin de trasformar las coordenadas a Planas Cartesianas basado en el sistema local de San Alfonso creado en el trabajo de grado “Actualización cartográfica del casco urbano de San Alfonso – Huila utilizando tecnología RPAS” (Castillo & Escobar, 2017) y así procesar el Ortomosaico. Tabla 6 Sistema Local San Alfonso Huila. Nombre. San Alfonso/Huila. Datúm. MAGNA SIRGAS. Latitud origen. 3°22’19’’ N. Longitud origen. 75°6’43’’ W. Falso Norte (m). 864683.213. Falso Este (m). 885038.836. Plano de Proyección (m). 396. Factor de Escala. 1.0006216640502. Este sistema local se encuentra aproximadamente a 4 Km del predio cumpliendo con los parámetros para transformación de coordenadas planas cartesianas Coordenadas Geográficas. Proyección Magna Sirgas. ITRF 84. Época 2016,87. Elipsoide de Referencia GRS80..
(34) 34. Figura 22 Transformación de coordenadas a Planas Cartesianas. Fuente Magna Pro3. (2017). 4.3.3 Procesamiento en Agisoft PhotoScan En el software PhotoScan primero se cargan las fotos Geo-etiquetadas con las coordenadas elipsoidales y se orientan. Figura 23 Orientación de las Fotografías en PhotoScan. Fuente Agisoft PhotoScan. (2017).. Dos imágenes, la número 81 y 84 que estaban muy nubladas no lograron esto, por lo que fueron eliminadas. Posterior a la orientación se descargaron la información de las cámaras (número de imagen, longitud, latitud, altura, cabeceo, alabeo, etc.) en archivo .txt para cambiar las coordenadas a planas cartesianas, y se vuelve a subir el archivo..
(35) 35. Figura 24 Cambio de Coordenadas de las imágenes en PhotoScan. Fuente Agisoft PhotoScan. (2017).. Se carga en un archivo .txt las coordenadas de los GCP y se crean inmediatamente los marcadores que ajustarán el Ortomosaico, cada marcador se filtra en las imágenes que contengan la cruz que define los puntos de control, y por último se optimiza para ver el error de ajuste en metros y pixeles. Se procede a realizar la nube de puntos densa en alta calidad, la malla, la textura, el modelo de teselas, el modelo digital de elevaciones y el Ortomosaico. Figura 25 Nube densa de Puntos en PhotoScan.
(36) 36. Fuente Agisoft PhotoScan. (2017).. Figura 26 Modelo Digital de Elevación creado por PhotoScan. Fuente Agisoft PhotoScan. (2017).. Al ver zonas nubladas en el Ortomosaico se debe editar, asignando imágenes que ayuden a ver claramente el terreno. Figura 27 Ortomosaico editado en PhotoScan. Fuente Agisoft PhotoScan. (2017)..
(37) 37. Se exporta el Ortomosaico en formato TIFF, para posteriormente recortarlo y vectorizarlo. En el Sofware Global Mapper se recortó el Ortomosaico con un buffer de 50 m desde el lindero del polígono suministrado por el IGAC..
(38) 38. 4.3.4 Vectorización del Predio En el software ArcGis se creó una Geodatabase con el nombre Aguas_claras_Huila, con el sistema local de referencia de San Alfonso donde se cargó el Ortomosaico recortado, para allí organizar y clasificar la información del terreno. La estructura de la Geodatabase fue la siguiente: Figura 28 Geodatabase CVC. Fuente ArcGIS 10.3. (2017).. Figura 29 Vectorización del Predio sobre el Ortomosaico. Fuente Agisoft PhotoScan. (2017)..
(39) 39. 4.3.5 Filtrado de los Puntos del Terreno La nube de puntos se divide en 5 bloques para lograr un mejor filtrado de puntos del terreno, ya que esta cuenta con alrededor de 21millones de puntos y en Microstation no genera el modelo completo del terreno porque es muy densa. Figura 30 División de Bloques Nube de Puntos Densa. Fuente Global Mapper 18. (2017). En el software MicroStation se creó un archivo DGN con el nombre CLASIFICACION_TERRENO donde se cargó la nube de puntos densa creada en PhotoScan de alta calidad, esta herramienta reclasifica los puntos LAS, según la altura desde la superficie del suelo creada utilizando retornos LIDAR terrestres la herramienta TSCAN para ajustar los puntos de terreno definiendo un grupo determinado (ground), la clasificación específica sobre el formato LAS, la cual se realiza por secciones cada 0.15m para obtener solo los puntos determinados como terreno descartando los puntos de vegetación alta y cuerpos de agua..
(40) 40. Figura 31 Parámetros secciones MicroStation. Fuente:MicroStation. (2017).. Una vez que la región reclasificada se considera satisfactoria, se puede guardar en formato LAS, admite la clasificación de cada punto según las especificaciones definidas incluidos en el rango de valores derivado de la altura especificada respecto al suelo. Figura 32 Clasificación terreno. Fuente MicroStation. (2017)..
(41) 41. Se compilan los bloques en ArcMap 10.3 en formato LAS visto como un DEM (Modelo Digital de Elevación), se crea el Raster que genera las curvas de nivel cada 2 m. Figura 33 Modelo Digital de Elevaciones de los Puntos Filtrados. Fuente ArcMap 10.3. (2017). 5. Resultados 5.1. Levantamiento con GPS. Ver resultados del postproceso de los puntos de lindero en Anexos 11.1 Reporte Coordenadas Leica Geo Office del Lindero 2016 y 11.2 Reporte Coordenadas Leica Geo Office del Lindero 2017, y resultados del postproceso de los puntos de control en anexo 11.3 Reporte Coordenadas Leica Geo Office de los Puntos de Control.. 5.2. Modelo Digital de Terreno. Del procesamiento se generó un modelo digital de terreno del predio en formato TIFF. El modelo digital de elevaciones es una imagen raster en la cual los pixeles contienen información de la cota del terreno, el modelo digital de elevaciones tiene los valores de cota del terreno y los elementos existentes en él, ya sean naturales o artificiales..
(42) 42. Figura 34 Modelo Digital de Elevaciones. Fuente PhotoScan. (2017).. 5.3. Ortomosaico. Como resultado del proceso fotogramétrico se generó el ortomosaico del predio georreferenciado en el sistema de coordenadas san Alfonso-Huila ajustado con 9 puntos de control. Ver anexo 11.6 Reporte proyecto photoScan. Figura 35 Ortomosaico. Fuente Global Mapper. (2017).
(43) 43. 5.3.1 Coordenadas de Puntos de Control Tabla 7 Coordenadas Cartesianas de los Puntos de Control. PUNTO. X/East(m). Y/North(m). z/altitud( m). Error(m). PC1. 865126,246. 881277,55. 420,433. 0.002296. PC2. 865345,256. 880635,961. 420,702. 0.004483. PC3. 865815,918. 880978,774. 423,252. 0.003355. PC4. 866358,071. 880976,756. 421,278. 0.001026. PC5. 866990,228. 882130,276. 386,946. 0.007783. PC6. 866456,493. 882451,066. 387,477. 0.015276. PC7. 865467,096. 882234,428. 406,979. 0.003813. PC8. 866005,697. 881826,213. 408,457. 0.003089. PC9. 866497,001. 881518,239. 409,303. 0.003262. Error total. 0.006380. Precisión de los marcadores ubicados como GCP en el predio, calculados por Agisoft PhotoScan.. 5.4. Producto FotoIndice. Para verificar el foto índice debe abrirse en la carpeta original en la cual fue creado, Recomendamos usas el software Google Earth para visualizar el archivo con extensión kml, allí se puede ver la fotografía tomada en el lugar exacto que tuvo lugar la línea de vuelo. Figura 36 Fotoíndice en Google Earth. Fuente Google Earth. (2017).
(44) 44. 5.5. Cartografía Digital. Al final se obtuvieron tres salidas graficas escala 1:5000 en el formato base proporcionado por INCODER (AGENCIA NACIONAL DE TIERRAS). Cabe aclarar que los formatos originales fueron modificados de acuerdo con las necesidades del proyecto y los objetos geográficos existentes, considerando que bajo las funciones de esta entidad está formalizar los títulos de predio rurales de Colombia. Figura 37 Plano Delimitación del Lindero Levantado en Campo. Fuente Propia. (2017).
(45) 45. Figura 38 Plano Comparativo de los Linderos del Área de Estudio. Fuente Propia. (2017). Figura 39 Plano Vectorización del Predio. Fuente propia. (2017). Los tres planos se pueden ver en los anexos 11.7 Plano Levantamiento Planimétrico predio Aguas Claras, 11.8 Plano Comparación de Lindero predio Aguas Claras y 11.9 Plano de Vectorización predio Aguas Claras..
(46) 46. 6. Análisis de Resultados 6.1. Puntos de Lindero. El error horizontal y vertical en posición de cada punto del lindero amarrado al vértice Señal de Azimut se encuentra entre 0.2 mm y 1.6 cm, en el siguiente análisis estadístico de los datos se puede evidenciar. Tabla 8 Estadística descriptiva de la precisión de los puntos Postprocesados. Estadística Media. Resultados 0.00147164. Error típico. 0.00016097. Mediana. 0.001. Moda. 0.0007. Desviación estándar. 0.00186332. Varianza de la muestra. 3.472E-06. Curtosis. 40.8568695. Coeficiente de asimetría. 5.80671199. Rango. 0.0162. Mínimo. 0.0002. Máximo. 0.0164. Suma. 0.1972. Cuenta. 134. Mayor (1). 0.0164. Menor (1). 0.0002. Nivel de confianza (95.0%). 0.00031839. Precisión en posición y altura de los resultados de los puntos del lindero calculados por Leica Geo Office.. 6.2. Actualización de la Información del Lindero. De la información que posee el IGAC, el plano obtenido del dueño del predio de 1993 y del levantamiento del lindero posicionado con GPS se analiza de la siguiente tabla:.
(47) 47. Tabla 9 Áreas de los diferentes polígonos del lindero del predio. Polígonos. Área (m2). Plano INCORA 1993. 2760604,54. Shape del IGAC. 2344265,518. Levantamiento con GPS. 2713913,308. Área calculada por AutoCAD Civil. Primero, la variación de 46692,232 m en el cálculo del área del plano de 1993 y el lindero actualmente levantado. Segundo, del Shape suministrado por el IGAC no es similar con los otros dos, esta muestra límites diferentes y un área menor en 416339.022 m2, como se puede observar en el anexo Plano linderos. 6.3. Características de la Vectorización. Dentro del predio encontramos las características del terreno, según la clasificación de la vectorización se muestra el área en la siguiente tabla. Tabla 10 Descripción Características de la Vectorización. Características de Terreno. Cantidad. Bosque. 875130.485 m2. Zonas Verdes. 543876.159 m2. Árboles. 129. Vía. 1300 m. Caminos. 7. Río. 3461 m. Cuencas. 12. Construcciones. 4. Fuente propia. (2017). La zona determinada como bosque constituye un 32% del total del terreno, y las zonas verdes abarcan el 20%, la otra mitad del terreno es suelo árido, el río colinda con el predio por el lado este en aproximadamente 3,5 km de longitud, y la vía limita por el lado oeste aproximadamente.
(48) 48. 1.3 km de longitud. Encontramos 7 caminos que rodean y cruzan el predio que utilizan para llegar al río y fincas vecinas. 6.4. Perfil. Según el DEM creado por la nube de puntos, el terreno muestra una altura geoidal desde los 378 a los 459 m. A continuación de muestra una clasificación modo RASTER. Figura 40 Imagen Raster de Elevación. Fuente ArcGIS 10.3. (2017).
(49) 49. 7. Conclusiones La precisión con que se levantó el lindero del predio tiene un error de posición horizontal y vertical de 2 cm como máximo. De 150 puntos tomados en campo 134 puntos definieron la delimitación del lindero del predio con ayuda del ortomosaico. El área calculada del lindero levantado fue de 271 Ha 3913m2 y su perímetro de 7655,313 m, en comparación con el Shape de catastro que es de 234 Ha 426 m2, mostró una diferencia de 36.965 Ha de terreno menor en cuanto al lindero actual y al plano realizado por el INCORA de 1993que presenta un área de 276 Ha 60 m2. Se considera que las 4 Hectáreas de más que cambia el lindero del plano de 1993 al actual son producto de la limitación del lindero por el borde del cuerpo de agua viendo que en el plano del INCORA no tomaron en cuenta la ronda del río. La ortografía se obtuvo por medio de 89 fotografías alineadas, donde dos de ellas fueron eliminadas por no cumplir con la calidad requerida para ser procesadas. Este se realizó con un GSD de 12.4 cm/ px, y se procesó con 9 puntos de control arrojando un error de 6 mm. La visualización de la ortofoto establece las características del terreno, presenta el 32% del área total del predio como bosque, un 20% como zonas verdes y el 48% restante es suelo árido, en el se observan 4 construcciones y 7 caminos que atraviesan el predio para comunicarse con fincas aledañas. Del levantamiento topográfico por medio de posicionamiento con GPS se estima 6 días de trabajo en campo, mientras que en métodos tradicionales podría estar entre 15 a 20 días. La precisión con la que se realiza la delimitación del lindero del predio es mayor por los equipos utilizados y cálculos posteriores que presentan precisiones al milímetro. Otra ventaja del levantamiento con RPAS es que la cantidad de personal se disminuye considerablemente, es mucho más práctico hacer un levantamiento con GPS que realizar una poligonal en un terreno tan extenso y de vegetación densa..
(50) 50. 8. Recomendaciones Realizar una validación de la información adquirida en campo, verificar que los datos no estén dañados o sean intranscendente. Comparar la información de procesamiento de imágenes en dos programas diferentes para llevar un control de calidad del proceso y resultados finales. Es importante que los puntos de control estén ubicados en zonas lo más despejadas posibles, que la superficie sea plana y horizontal para ser identificadas con mayor facilidad. El tamaño y la materialización implican su visibilidad y precisión en la ortofoto. No intentar remplazar la topografía convencional, aunque la obtención de datos con drones es mayor si se compara la cantidad de puntos que puede tomar un solo vuelo, con la obtenida de un levantamiento convencional, hay trabajos en los que se requiere precisión más que cantidad por eso este tipo de tecnología debe ser complementaria con la topografía clásica..
(51) 51. 9. Glosario En el presente glosario se incluyen términos que están a lo largo del trabajo de grado, cada término se incorporó por su relevancia dentro de la temática del proyecto, por tal motivo se ha hecho una breve descripción de cada uno. El glosario está basado en el libro Calidad en la Producción Cartográfica del autor Francisco Javier Ariza López, (Ariza López, 2002) Actualización. Acción para corregir o reemplazar datos en un conjunto de datos Calidad. Conjunto de características de una entidad que le confieren su aptitud para satisfacer las necesidades explícitas y las implícitas. Confiabilidad. Probabilidad de que un producto determinado tenga la capacidad de realizar las funciones para las que fue creado de manera apropiada durante un tiempo predeterminado y bajo ciertas condiciones de uso Control de calidad. Actividades de carácter operativo utilizadas para cumplir los requisitos de calidad. Datos geográficos. Tipo de información que corresponde a fenómenos directa o indirectamente asociado con una ubicación relativa de la tierra, manejable por una computadora. Digitalizar. Convertir una información analógica en información codificada digitalmente. Edición. Procedimiento para: a) eliminación de errores en BDG, o para b) la codificación de los atributos de los datos geográficos. Error. Separación respecto a un valor teórico o real de una medida o atributo Exactitud. Grado de concordancia entre el resultado de un ensayo y el valor de referencia aceptado. Incertidumbre. Falta de certeza, nivel de error. Magnitud. Atributo de un fenómeno u objeto que puede ser distinguido cualitativamente y determinado cuantitativamente. Medición. Actividad cuya finalidad es determinar el valor de una magnitud. Precisión. Calidad relacionada al grado de refinamiento de los instrumentos de medida al que determina el grado de coherencia de sucesivas mediciones del mismo fenómeno. Producto. Resultado de las actividades o procesos..
(52) 52. 10.Bibliografía. Drones: RPA y RPAS. (2014, diciembre 5). Recuperado a partir de https://porunalenguacongruente.com/2014/12/05/drones-rpa-rpas/ eBee SenseFly. (2017, septiembre 7). Soluciones Espaciales para Infraestructura. Recuperado a partir de http://www.geospatial.com.co/2017-02-23-13-25-50/senseflydrones.html Gema Sánchez Jiménez, Manuel Mulero Valenzuela, & Erich Saumeth Cadavid. (2013, mayo). Vehículos aéreos no tripulados en Latinoamérica. IDS. Recuperado a partir de http://www.infodefensa.com/wpcontent/uploads/Vehiculos_aereos_no_tripulados_en_Latam.pdf Gloria Stella Ortiz Delgado. (2017, octubre 9). República de Colombia Corte Constitucional Auto 540 de 2017. Recuperado a partir de http://www.corteconstitucional.gov.co/T-02504/AUTOS%202016/Auto%20540%20del%209%20de%20octubre%202017%20Incoder.pdf INGEOMINAS. (2009, octubre 27). Dirección Técnica del Servicio Geológico. Recuperado a partir de https://spi.dnp.gov.co/App_Themes/SeguimientoProyectos/ResumenEjecutivo/GEORED.pdf Instituto Geográfico de Venezuela Simón Bolivar, & Ministerio del Poder Popular para el Ambiente. (2011). Levantamiento topográfico con fines catastrales. Recuperado a partir de http://www.igvsb.gob.ve/documentos/manuales/Manual_levantamiento.pdf José Roberto Martínez Mejía. (2009, diciembre). “Levantamiento topográfico basado en equipo GPS con comunicación inalámbrica y publicación de resultados en aplicativo WEB.” (Trabajo de Grado). UNIVERSIDAD DE EL SALVADOR, San Salvador. Recuperado a partir de http://ri.ues.edu.sv/3812/1/Levantamiento%20topogr%C3%A1fico%20basado%20en%20equi po%20GPS%20concomunicaci%C3%B3n%20inal%C3%A1mbrica%20y%20publicaci%C3% B3n%20de%20resultados%20en%20aplicativo%20WEB.pdf Juan Sebastián Cardozo Rojas, & Jeniffer Alexandra Arenas Acosta. (2016). Metodología Para LevantamientosTopográficos Planimétricos de predios Rurales (Tesis). Universidad Distrital Francisco José de Caldas, Bogotá D.C. Recuperado a partir de http://repository.udistrital.edu.co/bitstream/11349/3248/1/ArenasAcostaJenifferAlexandraCard ozoRojasJuanSebastian2016.pdf Leyca Geosystem. (s. f.). uía para mediciones en modo Estático y Estático Rápido. Recuperado a partir de http://www.utdallas.edu/~aiken/LEICA/Documentation/Spanish/StaticRapid_3_0es.pdf Luis E. BiI León. (1987). Levantamientos Topográlicos (Informe). Medellín: Facultad de Minas Universidad Nacional de Colombia Sede Medellín. Recuperado a partir de http://www.bdigital.unal.edu.co/9204/2/8292174.2002.pdf Raquel Pachas L. (2009). El Levantamiento Topográfico: Uso de GPS y Estación Total, VIII, 17. Recuperado a partir de http://www.saber.ula.ve/bitstream/123456789/30397/1/articulo3.pdf.
(53) 53. Raul Moreno Chiroque, & Cesar Giron Salazar. (2011, agosto). Levantamiento con GPS. Recuperado a partir de http://www.monografias.com/trabajos93/levantamientogps/levantamiento-gps.shtml#ixzz4yxzfgUYr Reglamentación de drones o RPAS en Colombia (oficial Aerocivil). (2015, septiembre 8). Recuperado a partir de https://www.compudemano.com/reglamentacion-oficial-de-drones-orpas-en-colombia/ SenseFly Company. (s. f.). eBee El dron de cartografía profesional. Recuperado a partir de https://www.sensefly.com/fileadmin/user_upload/sensefly/documents/brochures/eBee_es.pdf Uso de Sistema de Posicionamiento Global. (s. f.). Recuperado a partir de http://amazoniaforestal.blogspot.com.co/2011/10/uso-del-sistema-de-posicionamiento.html.
(54) 54. 11.Anexos 11.1Reporte Coordenadas Lindero Leica Geo Office del Lindero 2016 11.2 Reporte Coordenadas Lindero Leica Geo Office del Lindero 2017 11.2.1 Reporte Coordenadas Lindero Leica Geo Office del Lindero Diciembre 2017 11.3 Reporte Coordenadas Leica Geo Office de los Puntos de Control 11.4 Especificaciones Topcon HiperLite+ 11.5 Especificaciones eBee SenseFly 11.6 Reporte proyecto Agisoft PhotoScan 11.7 Plano Levantamiento Planimétrico predio Aguas Claras 11.8 Plano Comparación de Linderos predio Aguas Claras 11.9Plano de Vectorización predio Aguas Claras.
(55)
Figure


+6





Documento similar
Dando cumplimiento a las normas del reglamento de grados y titulos de la Universidad Cesar Vallejo, Facultad de Ciencias Medicas Escuela Academica Profesional de Enfermeria,
En este Master se ofrece a los alumnos instrumentos para analizar y comprender los problemas sociales de nuestros días, para conocer la pluralidad de sujetos y agentes receptores
En este Master se ofrece a los alumnos instrumentos para analizar y comprender los problemas sociales de nuestros días, para conocer la pluralidad de sujetos y agentes receptores
Proporcionar al alumno los conocimientos fundamentales de la Contabilidad Financiera como sistema de información, en sus diferentes ámbitos de valoración, registro y comunicación..
BLOQUE TEMÁTICO I: MARCO CONCEPTUAL DE LA AUDITORÍA FINANCIERA TEMA 1: Aspectos conceptuales de la Auditoría Financiera.. TEMA 2: El Proceso de Auditoría de Cuentas Anuales TEMA
El alumno de esta asignatura ha estudiado previamente durante este segundo ciclo Inteligencia Artificial e Ingeniería del Conocimiento como asignatura troncal de cuarto curso2.
El programa de esta asignatura se ha distribuido en tres Unidades Didácticas, cuyo contenido es el siguiente: en la primera Unidad Didáctica se aborda la clasificación general de
En su lugar, con la entrada en vigor del nuevo plan de estudios de la carrera en el curso 2002-2003, desde entonces existen dos asignaturas cuatri-mestrales denominadas Física I
