INSTITUTO POLITÉCNICO NACIONAL
Q
QUUEEPPAARRAAOOBBTTEENNEERREELLTTÍÍTTUULLOODDEE::
I
INNGGEENNIIEERROOEELLEECCTTRRIICCIISSTTAA
P
PRREESSEENNTTAA::
LAURA LETICIA JUÁREZ CALTZONTZIN
M
MÉÉXXIICCOO,,DD..FF.. 22000088
DETERMINACIÓN DE LOS PARÁMETROS
DINÁMICOS DE MÁQUINAS SÍNCRONAS
POR MEDIO DE UN PROGRAMA
DE COMPUTADORA DIGITAL
E
Determinación de los parámetros dinámicos de máquinas síncronas por medio de un programa de computadora digital
D
EDICATORIA
A mis amigos
Por ser parte de mis proyectos y cómplices en mis sueños. A Rubén y Pamela por ser mi familia por elección y compañía sin condición. A Minoru, por que la vida sencillamente no da explicaciones: gracias. Los quiero mucho.
A mis familiares
Por que su presencia es y será siempre motivo de superación continua. Gracias por ser parte de mi vida, mi educación y mi formación profesional.
A Daniel
Por ser mi inspiración, por permanecer asiduamente, por ser razón, causa y pretexto para echar un vistazo en el tiempo.
A Marisol y Gustavo
Gracias por enseñarme lo más importante: a disfrutar de la vida y hacer de mis pasos siempre un andar ligero, nunca terminaré de agradecer a Dios por darme la posibilidad de llamarlos Hermanos. Los amo.
A mis padres
Determinación de los parámetros dinámicos de máquinas síncronas por medio de un programa de computadora digital
A
GRADECIMIENTOS
Al Instituto Politécnico Nacional
Por ser la institución vanguardista que es y haberme brindado la maravillosa oportunidad de incursionar en el interminable mundo del conocimiento.
A mis profesores
Por todo el conocimiento transmitido durante los años de la carrera, por el invaluable apoyo, esfuerzo y dedicación, pero sobre todo por las lecciones de vida que no estaban incluidas en la tira de materias.
Al M. en C. Tomás Ignacio Asiaín Olivares
Por las aportaciones hechas a este trabajo, por las críticas y comentarios siempre orientados a obtener buenos resultados. Sin su ayuda no se habría materializado este trabajo.
Muy especialmente al Dr. Daniel Ruiz Vega
Determinación de los parámetros dinámicos de máquinas síncronas por medio de un programa de computadora digital
R
ESUMEN
El cálculo de los parámetros dinámicos de la máquina síncrona es importante y necesario para realizar diversos estudios de sistemas eléctricos de potencia en los contextos de planeación, planeación de la operación y de la operación en tiempo real. La obtención de modelos que representen de manera fiel a las máquinas síncronas que forman al sistema de potencia es un punto frecuentemente estudiado a fin de que los resultados de los estudios de simulación de sistemas de potencia reflejen el funcionamiento del sistema real.
En el desarrollo de esta tesis, se presenta la implementación de un programa de computadora digital en Matlab® versión 7.0.0.19920 R14, para obtener los parámetros dinámicos necesarios para modelos en estudios de estabilidad, flujos de potencia y cortocircuito, basandose principalmente en la metodología de la norma internacional IEEE 115-1995.
La razón de generar una herramienta computacional para determinar los parámetros dinámicos de la máquina radica en el hecho de permitir analizar diversas máquinas en poco tiempo y de tener distintas opciones para analizar los resultados. Como en muchas otras aplicaciones, el programa realiza de manera más exacta y confiable las tareas repetitivas y demandantes en tiempo computacional, pero una parte fundamenteal para que los resultados del análisis sean válidos la proporciona el conocimiento y la experiencia del usuario.
Determinación de los parámetros dinámicos de máquinas síncronas por medio de un programa de computadora digital
C
ONTENIDO
Página
DEDICATORIA... V
AGRADECIMIENTOS ... VII
RESUMEN... IX
CONTENIDO ... XI
LISTA DE FIGURAS ...XIII
LISTA DE TABLAS ...XVII
CAPITULO 1: INTRODUCCION ... 1
1.1INTRODUCCION... 1
1.2ANTECEDENTES... 1
1.3OBJETIVO... 2
1.4JUSTIFICACION... 2
1.5LIMITACIONES Y ALCANCES... 2
1.6APORTACIONES... 3
1.7ESTRUCTURA DE LA TESIS... 3
CAPÍTULO 2: LA MÁQUINA SÍNCRONA... 5
2.1INTRODUCCION... 5
2.2TIPOS PRINCIPALES DE MAQUINAS SINCRONAS... 5
2.3MICRO MAQUINAS SINCRONAS DE LABORATORIO... 10
2.4MODELOS DINAMICOS DE LAS MAQUINAS SINCRONAS DE ACUERDO A SU ESTRUCTURA... 11
CAPITULO 3: PRUEBAS PARA DETERMINAR LOS PARAMETROS DE LA MAQUINA SINCRONA... 15
3.1INTRODUCCION... 15
3.2COMPONENTES DE CD DE LA CORRIENTE DE CORTOCIRCUITO... 17
3.2.1 Conceptos fundamentales de las constantes de tiempo ... 19
3.3COMPONENTES DE CA DE LA CORRIENTE DE CORTOCIRCUITO... 21
3.4EXPRESION ANALITICA PARA EL CALCULO DE LA CORRIENTE DE CORTOCIRCUITO... 22
3.5PRUEBA DE LABORATORIO... 25
CAPITULO 4: PROGRAMA DE COMPUTADORA DIGITAL ... 27
4.1INTRODUCCION... 27
4.2ESTRUCTURA DEL PROGRAMA... 27
4.3DIAGRAMAS DE FLUJO DEL PROGRAMA... 32
CAPITULO 5: APLICACION DE LA METODOLOGIA Y ANALISIS DE RESULTADOS ... 45
5.1INTRODUCCION... 45
5.2MAQUINA DE POLOS LISOS A TENSION REDUCIDA... 46
5.2.1 Parámetros de la máquina síncrona de polos lisos a tensión reducida con el criterio de la norma IEC ... 51
5.2.2 Parámetros de la máquina de polos lisos a tensión reducida con el criterio de la norma IEEE ... 55
5.3MAQUINA DE POLOS SALIENTES A TENSION REDUCIDA... 58
Página
5.4MAQUINA DE POLOS LISOS A TENSION PLENA... 67
5.4.1 Parámetros de la máquina de polos lisos a tensión plena con el criterio de la norma IEC... 71
5.4.2 Parámetros de la máquina de polos lisos a tensión plena con el criterio de la norma IEEE ... 74
5.5MAQUINA DE POLOS SALIENTES A TENSION PLENA... 76
5.5.1 Parámetros de la máquina de polos salientes a tensión plena con el criterio de la norma IEC ... 81
5.5.2 Parámetros de la máquina de polos salientes a tensión plena con el criterio de la norma IEEE... 83
5.6DISCUSION DE RESULTADOS... 86
CAPITULO 6: CONCLUSIONES ... 89
6.1CONCLUSIONES... 89
6.2APORTACIONES... 89
6.3RECOMENDACIONES PARA TRABAJOS FUTUROS... 90
REFERENCIAS ... 91
Determinación de los parámetros dinámicos de máquinas síncronas por medio de un programa de computadora digital
L
ISTA DE
F
IGURAS
Página
FIGURA 2.1:MAQUINA DE POLOS SALIENTES (ADAPTADA DE [GARDUÑO 2005]). ... 6
FIGURA 2.2:MAQUINA DE POLOS LISOS (ADAPTADA DE [GARDUÑO 2005]). ... 6
FIGURA 2.3:DEVANADO DE ARMADURA (ADAPTADA DE [GARDUÑO 2005]).... 7
FIGURA 2.4:CARCAZA TIPO CERRADA (ADAPTADA DE [GARDUÑO 2005]). ... 7
FIGURA 2.5:CARCAZA TIPO ABIERTA (ADAPTADA DE [GARDUÑO 2005])... 8
FIGURA 2.6:FLECHA (ADAPTADA DE [GARDUÑO 2005]). ... 8
FIGURA 2.7:MICROMAQUINAS DEL SIMULADOR EXPERIMENTAL CON SU PRIMO MOTOR (ADAPTADA DE [MEJÍA Y TRINIDAD,2007]). ... 10
FIGURA 2.8:REPRESENTACION DE LA MAQUINA SINCRONA PARA DESARROLLO MATEMATICO.EL ACOPLAMIENTO ENTRE LOS DEVANADOS DE FASE Y LOS CIRCUITOS DEL ROTOR NO SE MUESTRA A FIN DE EVITAR CONFUSIONES (ADAPTADA DE [PAVELLA Y MURTHY,1994]). ... 12
FIGURA 3.1:CORRIENTES DE CORTOCIRCUITO EN LAS FASES Y EL CAMPO DE UN GENERADOR SINCRONO EN VACIO (ADAPTADO DE KIMBARK,1956]). ... 15
FIGURA 3.2:COMPONENTES DE LA CORRIENTE DE CORTO CIRCUITO DE FASE DE LA MÁQUINA SÍNCRONA EN VACÍO (ADAPTADA DE [DE METZ-NOBLAT ET AL.,2000])... 16
FIGURA 3.3:CIRCUITO BÁSICO PARA DEMOSTRAR EL TEOREMA DE LOS ENLACES DE FLUJO CONSTANTES (ADAPTADO DE [KIMBARK,1956]). ... 18
FIGURA 3.4:COMPONENTES DE CD DE LAS CORRIENTES DE LA FIGURA 3.1. A)COMPONENTES DE CD EN EL TIEMPO.B)VALORES INICIALES DE LAS COMPONENTES (SOBRE EL EJE REAL).ADAPTADO DE [KIMBARK,1956]. ... 18
FIGURA 3.5:CAIDA EXPONENCIAL DE LA CORRIENTE (ADAPTADA DE [KIMBARK,1956]). ... 20
FIGURA 3.6:GRAFICA EXPONENCIAL EN ESCALA SEMILOGARITMICA (ADAPTADA DE [KIMBARK,1956]). ... 20
FIGURA 3.7:GRAFICA EXPONENCIAL EN ESCALA SEMILOGARITMICA (ADAPTADA DE [KIMBARK,1956]). ... 21
FIGURA 3.8:FLUJO MAGNETICO DE LA MAQUINA SINCRONA PARA LA CORRIENTE DE SUBTRANSITORIA DE CORTOCIRCUITO. A)REACTANCIA SUBTRANSITORIA EN EL EJE DIRECTO (X”D) Y B)REACTANCIA SUBTRANSITORIA EN EL EJE EN CUADRATURA (X”Q)(ADAPTADA DE [KIMBARK,1956])... 24
FIGURA 3.9:FLUJO MAGNETICO DE LA MAQUINA SINCRONA PARA LA CORRIENTE TRANSITORIA DE CORTOCIRCUITO. A)REACTANCIA TRANSITORIA EN EL EJE DIRECTO (X’D ) Y B)REACTANCIA TRANSITORIA EN EL EJE EN CUADRATURA (X’Q) (ADAPTADA DE [KIMBARK,1956]). ... 24
FIGURA 3.10:FLUJO MAGNETICO DE LA MAQUINA SINCRONA PARA LA CORRIENTE DE CORTOCIRCUITO PERMANENTE. A)REACTANCIA SINCRONA EN EL EJE DIRECTO (XD ) Y B)REACTANCIA SINCRONA EN EL EJE EN CUADRATURA (XQ) (ADAPTADA DE [KIMBARK,1956]). ... 24
FIGURA 3.11:DIAGRAMA FISICO DE CONEXIONES PARA LAS PRUEBAS DE CORTOCIRCUITO REPENTINO APLICADO A LAS DOS MICROMAQUINAS DEL SIMULADOR [MEJIA Y TRINIDAD,2007]. ... 25
FIGURA 4.1:DATOS PARA EL ANALISIS AUTOMATICO (ADAPTADA DE [KAMWA Y OTROS,1995]). ... 28
FIGURA 4.2:ESTADO TRANSITORIO (ADAPTADA DE [KAMWA Y OTROS,1995]). ... 29
FIGURA 4.3:ESTADO SUBTRANSITORIO (ADAPTADA DE [KAMWA Y OTROS,1995]). ... 30
FIGURA 4.4:COMPONENTE DE CD(ADAPTADA DE [KAMWA Y OTROS,1995]). ... 31
FIGURA 4.5:DIAGRAMA DE FLUJO DEL FUNCIONAMIENTO DEL PROGRAMA. ... 33
FIGURA 4.6:DIAGRAMA DE FLUJO DEL PROGRAMA PRINCIPAL. ... 35
FIGURA 4.7:DIAGRAMA DE FLUJO DE LA SUBRUTINA “MAX_MIN”. ... 36
FIGURA 4.8:DIAGRAMA DE FLUJO DE LA SUBRUTINA “SINCRO”. ... 37
FIGURA 4.9A):DIAGRAMA DE FLUJO DE LA SUBRUTINA “MODELOS”. ... 39
FIGURA 4.9B):DIAGRAMA DE FLUJO DE LA SUBRUTINA “MODELOS”CONTINUACION). ... 40
FIGURA 4.10:DIAGRAMA DE FLUJO DE LA SUBRUTINA “COMPDIR”... 41
FIGURA 4.11:DIAGRAMA DE FLUJO DE LA SUBRUTINA “VALIDA”... 42
FIGURA 5.1:CORRIENTES MEDIDAS EN EL LABORATORIO.MAQUINA SINCRONA DE POLOS LISOS, PRUEBA DE CORTOCIRCUITO REPENTINO EN VACIO A TENSION REDUCIDA. ... 47
FIGURA 5.2:ENVOLVENTE DE LA FASE A.MAQUINA SINCRONA DE POLOS LISOS A TENSION REDUCIDA... 48
Página
FIGURA 5.5:COMPARACION DE LAS ENVOLVENTES DE FASE.MAQUINA DE POLOS LISOS A TENSION
REDUCIDA. ... 49
FIGURA 5.6:ENVOLVENTE PROMEDIO DE LAS TRES FASES.MAQUINA SINCRONA DE POLOS LISOS A
TENSION REDUCIDA. ... 50
FIGURA 5.7:COMPONENTES DE CD DE LAS TRES FASES.MAQUINA SINCRONA DE POLOS LISOS A TENSION
REDUCIDA. ... 50
FIGURA 5.8:MODELO LINEAL SUBTRANSITORIO.MAQUINA DE POLOS LISOS A TENSION REDUCIDA.
NORMA IEC. ... 52
FIGURA 5.9:MODELO LINEAL TRANSITORIO.MAQUINA DE POLOS LISOS A TENSION REDUCIDA.NORMA
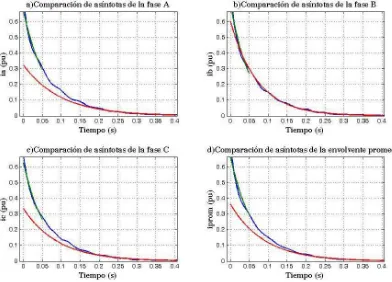
IEC. ... 52 FIGURA 5.10:COMPARACION DE ASINTOTAS EN EL TIEMPO (PRIMER METODO DE VALIDACION).
MAQUINA SINCRONA DE POLOS LISOS A TENSION REDUCIDA.NORMA IEC. ... 53
FIGURA 5.11:MODELO LINEAL DE LA COMPONENTE DE CD.MAQUINA DE POLOS LISOS A TENSION
REDUCIDA. NORMA IEC. ... 53
FIGURA 5.12:GRAFICA DE LA CORRIENTE CALCULADA A PARTIR DE LOS PARAMETROS.MAQUINA
SINCRONA DE POLOS LISOS A TENSION REDUCIDA.NORMA IEC. ... 54
FIGURA 5.13:COMPARACION ENTRE LA CORRIENTE MEDIDA Y LA CALCULADA (SEGUNDO METODO DE
VALIDACION).MAQUINA SINCRONA DE POLOS LISOS A TENSION REDUCIDA.NORMA IEC. ... 54
FIGURA 5.14:MODELO LINEAL SUBTRANSITORIO.MAQUINA DE POLOS LISOS A TENSION REDUCIDA.
NORMA IEEE. ... 56
FIGURA 5.15:MODELO LINEAL TRANSITORIO.MAQUINA DE POLOS LISOS A TENSION REDUCIDA.NORMA
IEEE. ... 56 FIGURA 5.16:COMPARACION DE ASINTOTAS EN EL TIEMPO (PRIMER METODO DE VALIDACION).
MAQUINA SINCRONA DE POLOS LISOS A TENSION REDUCIDA.NORMA IEEE. ... 57
FIGURA 5.17:MODELO LINEAL DE LA COMPONENTE DE CD.MAQUINA DE POLOS LISOS A TENSION
REDUCIDA. NORMA IEEE. ... 57
FIGURA 5.18:CORRIENTES MEDIDAS EN EL LABORATORIO.MAQUINA SINCRONA DE POLOS SALIENTES A
TENSION REDUCIDA. ... 59
FIGURA 5.19:ENVOLVENTE SIMETRICA DE LA FASE A.MAQUINA SINCRONA DE POLOS SALIENTES A
TENSION REDUCIDA. ... 59
FIGURA 5.20:ENVOLVENTE SIMETRICA DE LA FASE B.MAQUINA SINCRONA DE POLOS SALIENTES A
TENSION REDUCIDA. ... 60
FIGURA 5.21:ENVOLVENTE SIMETRICA DE LA FASE C.MAQUINA SINCRONA DE POLOS SALIENTES A
TENSION REDUCIDA. ... 60
FIGURA 5.22:COMPARACION DE LAS ENVOLVENTES SIMETRICAS DE FASE.MAQUINA SINCRONA DE
POLOS SALIENTES A TENSION REDUCIDA... 61
FIGURA 5.23:ENVOLVENTE PROMEDIO DE LAS TRES FASES.MAQUINA SINCRONA DE POLOS SALIENTES A
TENSION REDUCIDA. ... 61
FIGURA 5.24:COMPONENTES DE CD DE LAS TRES FASES.MAQUINA DE POLOS SALIENTES A TENSION
REDUCIDA. ... 62
FIGURA 5.25:MODELO LINEAL SUBTRANSITORIO.MAQUINA DE POLOS SALIENTES A TENSION REDUCIDA.
NORMA IEC. ... 63
FIGURA 5.26:MODELO LINEAL TRANSITORIO.MAQUINA DE POLOS SALIENTES A TENSION REDUCIDA.
NORMA IEC. ... 63
FIGURA 5.27:COMPARACION DE ASINTOTAS EN EL TIEMPO (PRIMER METODO DE VALIDACION).
MAQUINA SINCRONA DE POLOS SALIENTES A TENSION REDUCIDA.NORMA IEC. ... 64
FIGURA 5.28:MODELO LINEAL DE LA COMPONENTE DE CD.MAQUINA SINCRONA DE POLOS SALIENTES A
TENSION REDUCIDA.NORMA IEC... 64
FIGURA 5.29:MODELO LINEAL SUBTRANSITORIO.MAQUINA SINCRONA DE POLOS SALIENTES A TENSION
REDUCIDA.NORMA IEEE. ... 65
FIGURA 5.30:MODELO LINEAL TRANSITORIO.MAQUINA SINCRONA DE POLOS SALIENTES A TENSION
REDUCIDA. NORMA IEEE. ... 66
FIGURA 5.31:COMPARACION DE ASINTOTAS EN EL TIEMPO (PRIMER METODO DE VALIDACION).
Determinación de los parámetros dinámicos de máquinas síncronas por medio de un programa de computadora digital
Página
FIGURA 5.32:MODELO LINEAL DE LA COMPONENTE DE CD.MAQUINA SINCRONA DE POLOS SALIENTES A
TENSION REDUCIDA.NORMA IEEE... 67
FIGURA 5.33:CORRIENTES MEDIDAS EN EL LABORATORIO.MAQUINA SINCRONA DE POLOS LISOS A
TENSION PLENA. ... 68
FIGURA 5.34:ENVOLVENTE SIMETRICA DE LA FASE A.MAQUINA SINCRONA DE POLOS LISOS A TENSION
PLENA... 68
FIGURA 5.35:ENVOLVENTE SIMETRICA DE LA FASE B.MAQUINA SINCRONA DE POLOS LISOS A TENSION
PLENA... 69
FIGURA 5.36:ENVOLVENTE SIMETRICA DE LA FASE C.MAQUINA SINCRONA DE POLOS LISOS A TENSION
PLENA... 69
FIGURA 5.37:COMPARACION DE LAS ENVOLVENTES SIMETRICAS DE FASE.MAQUINA SINCRONA DE
POLOS LISOS A TENSION PLENA. ... 70
FIGURA 5.38:ENVOLVENTE SIMETRICA PROMEDIO DE LAS TRES FASES.MAQUINA SINCRONA DE POLOS
LISOS A TENSION PLENA... 70
FIGURA 5.39:COMPONENTES DE CD DE LAS TRES FASES.MAQUINA DE POLOS LISOS A TENSION PLENA... 71
FIGURA 5.40:MODELO LINEAL SUBTRANSITORIO.MAQUINA SINCRONA DE POLOS LISOS A TENSION
PLENA. NORMA IEC. ... 72
FIGURA 5.41:MODELO LINEAL TRANSITORIO.MAQUINA SINCRONA DE POLOS LISOS A TENSION PLENA.
NORMA IEC. ... 72
FIGURA 5.42:COMPARACION DE ASINTOTAS EN EL TIEMPO (PRIMER METODO DE VALIDACION).
MAQUINA SINCRONA DE POLOS LISOS A TENSION PLENA.NORMA IEC. ... 73
FIGURA 5.43:MODELO LINEAL DE LA COMPONENTE DE CD.MAQUINA SINCRONA DE POLOS LISOS A
TENSION PLENA. ... 73
NORMA IEC... 73
FIGURA 5.44:MODELO LINEAL SUBTRANSITORIO.MAQUINA DE POLOS LISOS, PRUEBA A TENSION PLENA.
NORMA IEEE. ... 74
FIGURA 5.45:MODELO LINEAL TRANSITORIO.MAQUINA DE POLOS LISOS, PRUEBA A TENSION PLENA.
NORMA IEEE. ... 75
FIGURA 5.46:COMPARACION DE ASINTOTAS EN EL TIEMPO (PRIMER METODO DE VALIDACION).
MAQUINA DE POLOS LISOS, PRUEBA A TENSION PLENA.NORMA IEEE. ... 75
FIGURA 5.47:MODELO LINEAL DE LA COMPONENTE DE CD.MAQUINA SINCRONA DE POLOS LISOS A
TENSION PLENA. ... 76
NORMA IEEE... 76
FIGURA 5.48:CORRIENTES MEDIDAS EN EL LABORATORIO.MAQUINA SINCRONA DE POLOS SALIENTES A
TENSION PLENA. ... 77
FIGURA 5.49:ENVOLVENTE SIMETRICA DE LA FASE A.MAQUINA SINCRONA DE POLOS SALIENTES A
TENSION PLENA. ... 78
FIGURA 5.50:ENVOLVENTE SIMETRICA DE LA FASE B.MAQUINA SINCRONA DE POLOS SALIENTES A
TENSION PLENA. ... 78
FIGURA 5.51:ENVOLVENTE SIMETRICA DE LA FASE C.MAQUINA SINCRONA DE POLOS SALIENTES A
TENSION PLENA. ... 79
FIGURA 5.52:COMPARACION DE LAS ENVOLVENTES SIMETRICAS DE FASE.MAQUINA SINCRONA DE
POLOS SALIENTES A TENSION PLENA... 79
FIGURA 5.53:ENVOLVENTE SIMETRICA PROMEDIO DE LAS TRES FASES.MAQUINA SINCRONA DE POLOS
SALIENTES A TENSION PLENA... 80
FIGURA 5.54:COMPONENTES DE CD DE LAS TRES FASES.MAQUINA SINCRONA DE POLOS SALIENTES A
TENSION PLENA. ... 80
FIGURA 5.55:MODELO LINEAL SUBTRANSITORIO.MAQUINA SINCRONA DE POLOS SALIENTES A TENSION
PLENA. NORMA IEC. ... 81
FIGURA 5.56:MODELO LINEAL TRANSITORIO.MAQUINA SINCRONA DE POLOS SALIENTES A TENSION
PLENA. NORMA IEC. ... 82
FIGURA 5.57:COMPARACION DE ASINTOTAS EN EL TIEMPO (PRIMER METODO DE VALIDACION).
Página
FIGURA 5.58:MODELO LINEAL DE LA COMPONENTE DE CD.MAQUINA SINCRONA DE POLOS SALIENTES A
TENSION PLENA.NORMA IEC. ... 83
FIGURA 5.59:MODELO LINEAL SUBTRANSITORIO.MAQUINA DE POLOS SALIENTES, PRUEBA A TENSION
PLENA. NORMA IEEE. ... 84
FIGURA 5.60:MODELO LINEAL TRANSITORIO.MAQUINA DE POLOS SALIENTES, PRUEBA A TENSION
PLENA. NORMA IEEE. ... 84
FIGURA 5.61:COMPARACION DE ASINTOTAS EN EL TIEMPO (PRIMER METODO DE VALIDACION).
MAQUINA DE POLOS LISOS, PRUEBA A TENSION PLENA.NORMA IEEE. ... 85
FIGURA 5.62:MODELO LINEAL DE LA COMPONENTE DE CD.MAQUINA SINCRONA DE POLOS LISOS A
Determinación de los parámetros dinámicos de máquinas síncronas por medio de un programa de computadora digital
L
ISTA DE
T
ABLAS
Página
TABLA 2.1DATOS DE PLACA DE LOS GENERADORES [MEJIA Y TRINIDAD,2007]... 11 TABLA 3.1:PARAMETROS DINAMICOS ESTANDAR DE LAS MAQUINAS SINCRONAS Y SU RELACION CON
LOS DEVANADOS DEL MODELO*. ... 23
TABLA 5.1:PARAMETROS EN P.U. DE LA M.S. DE POLOS LISOS A TENSION REDUCIDA CON LA NORMA
IEC. ... 55 TABLA 5.2:PARAMETROS EN P.U. DE LA M.S. DE POLOS LISOS A TENSION REDUCIDA CON LA NORMA
IEEE. ... 58 TABLA 5.3:PARAMETROS EN P.U. DE LA M.S. DE POLOS SALIENTES A TENSION REDUCIDA CON LA
NORMA IEC... 62
TABLA 5.4:PARAMETROS EN P.U. DE LA M.S. DE POLOS SALIENTES A TENSION REDUCIDA CON LA
NORMA IEEE... 65
TABLA 5.5:PARAMETROS EN P.U. DE LA M.S. DE POLOS LISOS A TENSION PLENA CON LA NORMA IEC. ... 74
TABLA 5.6:PARAMETROS EN P.U. DE LA M.S. DE POLOS LISOS A TENSION PLENA CON LA NORMA IEEE. ... 76
TABLA 5.7:PARAMETROS EN P.U. DE LA M.S. DE POLOS SALIENTES A TENSION PLENA CON LA NORMA
IEC. ... 83 TABLA 5.8:PARAMETROS EN P.U. DE LA M.S. DE POLOS SALIENTES A TENSION PLENA CON LA NORMA
IEEE. ... 86 TABLA 5.9:COMPARACION DE LOS PARAMETROS EN P.U. DE LA MAQUINA SINCRONA DE POLOS LISOS
CONSIDERANDO LA APLICACION DE DIFERENTES NORMAS Y CON LOS RESULTADOS DE [MEJIA Y
TRINIDAD,2007]. ... 87 TABLA 5.10:COMPARACION DE LOS PARAMETROS EN P.U. DE LA MAQUINA SINCRONA DE POLOS
SALIENTES CONSIDERANDO LA APLICACION DE DIFERENTES NORMAS Y CON LOS RESULTADOS DE
C
APÍTULO
1:
I
NTRODUCCIÓN
1.1 INTRODUCCIÓN
Para el desarrollo de este trabajo se tomó como referencia la norma internacional IEEE 115-1995 [IEEE, 1995] y los procedimientos que en ella están indicados para implementar un programa de computadora digital capaz de determinar los parámetros dinámicos de la máquina síncrona. Conviene mostrar, previamente al desarrollo del problema en sí, un panorama general que justifique la necesidad de obtener dichos parámetros y para tal fin a continuación se destacan algunos de los aspectos más importantes referentes al Sistema Eléctrico de Potencia y a los parámetros de la máquina síncrona.
Los simuladores de laboratorio se han desarrollado desde principios del siglo pasado y continuamente han sido perfeccionados y mejorados. Los primeros eran los llamados “Analizadores de Red” (1930-1950) y en ellos el sistema estaba representado en su forma más simple y únicamente reproducían el comportamiento estático de la red de transmisión del sistema. En los años subsecuentes se han desarrollado otro tipo de simuladores y con la llegada de las llamadas “micromáquinas” el análisis de los sistemas de potencia se vió ampliado de gran manera con el uso máquinas de unos cuantos HP’s para reproducir el comportamiento de máquinas reales con la única desventaja del elevado costo. Para lograr los propósitos de éste trabajo se utilizó el Simulador Experimental del laboratorio Pesados II de la ESIME Zacatenco lo que representa un ventaja importante ya que el uso de éste tipo de simuladores permite en gran medida mejorar y desarrollar equipos de medición, control y protección y nuevas técnicas para resolver problemas en el sistema [Ruiz et al., 2007].
1.2 ANTECEDENTES
Determinación de los parámetros dinámicos de máquinas síncronas por medio de un programa de computadora digital
previos al presente [Asiaín, 1991, García, 2007, Mejía y Trinidad, 2007] y que sirvieron de referencia y punto de partida al presente trabajo.
1.3 OBJETIVO
Desarrollar un programa de computadora digital para obtener los parámetros dinámicos de la máquina síncrona a partir de pruebas de corto circuito con la máquina en vacío.
1.4 JUSTIFICACIÓN
Este trabajo surge ante la necesidad de conocer los parámetros dinámicos de máquinas síncronas. Tiene como fin realizar el cálculo de parámetros de una manera más rápida y sencilla por medio de un programa de computadora digital, reduciendo considerablemente, de esta manera, el tiempo de análisis de los resultados de las pruebas aplicadas a las máquinas síncronas.
Las máquinas síncronas son una parte primordial del Sistema Eléctrico de Potencia y por lo tanto es importante tener disponibles parámetros que permitan conocer su funcionamiento. La razón principal para conocer los parámetros dinámicos de una máquina síncrona radica en el hecho de que son necesarios para realizar estudios de corto circuito y estabilidad veraces y útiles en el ajuste de protecciones y en la toma de decisiones ante contingencias y situaciones propias del SEP.
Determinar de manera adecuada y exacta los parámetros de las máquinas síncronas es, actualmente, un problema de interés tanto en las grandes compañías eléctricas nacionales e internacionales (como Comisión Federal de Electricidad) como en industrias que cuentan con generadores para satisfacer una parte o la totalidad de su carga. Con el fin de probar el programa de computadora y poder verificar los resultados experimentalmente, en este trabajo se realiza el cálculo de parámetros de las micromáquinas del Simulador Experimental del Sistema Eléctrico de Potencia de los Laboratorios Pesados II de la Escuela Superior de Ingeniería Mecánica y Eléctrica Zacatenco.
1.5 LIMITACIONES Y ALCANCES
Los parámetros se determinaron en base a las normas IEEE 115 , IEC 34-4 [IEEE, 1995, IEC, 1995] y el artículo [Kamwa y otros, 1995] por lo que todos los procedimientos están basados en dichos documentos y aplicados a las micromáquinas del Simulador Experimental mencionado, de tal manera que los resultados obtenidos son aplicables únicamente a dichas máquinas y están sujetos a las condiciones de prueba de dicho laboratorio y al equipo instalado.
Capítulo 1:Introducción
de una máquina real, por lo que los procedimientos del presente trabajo podrían ser utilizados para analizar máquinas de mucha más capacidad y el programa para computadora digital implementado permite un análisis mucho más simplificado, rápido y flexible para el usuario además de presentar la posibilidad de ser modificado en un futuro para otras aplicaciones o para ampliar su capacidad de análisis.
1.6 APORTACIONES
La aportación principal de este documento es el desarrollo de una nueva herramienta computacional para la obtención de los parámetros de la máquina síncrona, la cual brinda la oportunidad de analizar nuevas máquinas de una manera más rápida y sencilla, por medio de una interfase más amigable y flexible al tratarse de un programa sencillo escrito en un ambiente de computadora (MATLAB®) con el que en gran medida el usuario está familiarizado.
1.7 ESTRUCTURA DE LA TESIS
• En el capítulo uno se presentan el objetivo de ésta tesis, las razones por las que se llevó a cabo el trabajo, y los alcances, limitaciones y aportaciones.
• En el capítulo dos se hace una breve descripción general de la construcción de la Máquina Síncrona y en particular de las micromáquinas del simulador experimental de laboratorio.
• En el capítulo tres se presenta la teoría de los parámetros dinámicos de la Máquina Síncrona y su relación con las corrientes de corto circuito, así como las pruebas pertinentes para obtenerlos.
• En el capítulo cuatro se aborda el principal problema planteado: la implementación del programa de computadora digital. Se hace una breve descripción de la estructura del programa en base a las normas establecidas y de la operación del programa implementado.
• En el capítulo cinco se presentan las pruebas realizadas a las diferentes máquinas, los resultados obtenidos, el análisis de dichas pruebas y una breve discusión de los resultados y su validación.
CAPÍTULO 2:
LA MÁQUINA SÍNCRONA
2.1 INTRODUCCIÓN
Definición.
El generador síncrono es una máquina utilizada para convertir potencia mecánica en potencia eléctrica.
Su principio de funcionamiento se basa en la ley de Faraday que establece de la manera más general que si existe un movimiento entre un campo magnético y un conductor dentro de él, se inducirá una fuerza electromotriz en dicho conductor.
dt d N
E=(−) φ (2.1)
Los generadores síncronos se nombran de esta manera debido a que la frecuencia eléctrica producida está entrelazada o sincronizada con la tasa mecánica de rotación del generador.
2.2 TIPOS PRINCIPALES DE MÁQUINAS SÍNCRONAS
Construcción.
Las partes constitutivas del generador son: • Inductor
• Inducido • Carcaza • Flecha o eje • Anillos rozantes • Escobillas • Tapas laterales • Rodamientos
Brevemente se describen las partes constitutivas del generador. Inductor
Determinación de los parámetros dinámicos de máquinas síncronas por medio de un programa de computadora digital
sea el caso; la mayoría de los generadores en alta tensión son de campo móvil por lo que bien puede ser el rotor de la máquina.
Básicamente el devanado de campo o rotor es un gran electroimán y lo constituyen las bobinas y su respectivo núcleo que se montan: alrededor del núcleo cuando el generador es de polos salientes (generalmente son hidrogeneradores de baja velocidad para plantas hidroeléctricas y son máquinas de rotores de dos o cuatro polos) o bien, en las ranuras hechas en el núcleo si el generador es de polos lisos (generalmente son los turbogeneradores de alta velocidad para plantas termoeléctricas y se construyen de mas de cuatro polos).
El rotor se construye con láminas delgadas agrupadas para reducir las pérdidas por corrientes parásitas.
Para excitar las bobinas del inductor es necesaria una fuente externa de corriente directa llamada excitatriz. Existen diferentes esquemas de excitación del generador síncrono y se mencionan las dos más comunes:
• Suministrar potencia de corriente directa desde una fuente externa por medio de anillos rozantes y escobillas.
• Suministrar potencia de corriente directa desde una fuente montada en el eje del propio generador.
(a)Rotor de polos salientes . (b) Circuito magnético del rotor de polos salientes Figura 2.1: Máquina de polos salientes (adaptada de [Garduño 2005]).
Capítulo 2: La Máquina Síncrona
Inducido
Comúnmente llamado devanado de armadura, es la parte fija del generador por lo que se puede denominar estator. Está constituido por un núcleo y bobinas, es decir, es el devanado en le que se induce la f.e.m. principal por efecto de la acción del campo magnético del inducido. El núcleo del estator está formado por laminaciones de acero al silicio con el fin de evitar inducción formación de corrientes parásitas y para disminuir las pérdidas por histéresis.
El estator se construye normalmente con devanados preformados en doble capa; el devanado es distribuido y encordado para reducir el contenido de armónicas de los voltajes y corrientes de salida.
Figura 2.3: Devanado de armadura (adaptada de [Garduño 2005]).
Carcaza:
Es el soporte mecánico generalmente de fierro moldeado de dos o más segmentos según el tamaño de la máquina. Puede ser del tipo cerrada o abierta.
Determinación de los parámetros dinámicos de máquinas síncronas por medio de un programa de computadora digital
Figura 2.5: Carcaza tipo abierta (adaptada de [Garduño 2005]).
Flecha:
Es el eje de la máquina construido de acero forjado, hueco para máquinas de gran velocidad.
Figura 2.6: Flecha (adaptada de [Garduño 2005]). Anillos rozantes:
Son anillos metálicos que circundan el eje de la máquina pero se encuentran aislados de él. Un extremo del devanado del rotor dc está unido a cada uno de los anillos rozantes colocados sobre el eje de la máquina.
Escobillas:
Son bloques de carbón grafitado que conducen la electricidad fácilmente y son de muy baja fricción, van montadas sobre los anillos rozantes.
El uso de las escobillas y anillos rozantes para la excitación del generador síncrono generan complicaciones debido al mantenimiento constante que demandan aunque son comúnmente utilizados en la excitación de máquinas pequeñas por cuestiones de costo.
En máquinas síncronas de gran tamaño se utilizan excitadores sin escobillas para suministrar corriente directa al devanado de campo, que son generadores de corriente alterna pequeños montados sobre el eje del rotor cuya salida trifásica es rectificada por medio de un rectificador montado también sobre el eje del generador y se incluye en el circuito principal de campo dc.
Capítulo 2: La Máquina Síncrona
Controlando la pequeña corriente de campo del generador excitador es posible ajustar la corriente de excitación del generador principal sin utilizar anillos rozantes ni escobillas.
El sistema de excitación de un generador síncrono tiene como función: • Suministrar corriente directa al devanado de campo del generador. • Controlar las tensiones de forma rápida y automática.
• Contribuir a la estabilidad de la máquina.
• Proveer la distribución apropiada de potencia entre los generadores conectados en paralelo.
Los sistemas de excitación están constituidos por un generador dc, o uno de ca más un rectificador, y un regulador de tensión; el regulador de tensión es un dispositivo de control que regula la excitación y la producción de reactivos, la función del regulador de tensión es llevar al generador a la tensión adecuada para su sincronización.
Anteriormente se mencionaron las formas más comunes de excitación de un generador síncrono y, dependiendo de la complejidad del esquema y del sistema en que se encuentre el generador, sus conexiones pueden ser:
• Por medio de barras comunes con excitatrices accionadas por motores alimentados desde las barras principales.
• Por medio de barras comunes con excitatrices directamente acopladas a los generadores principales.
• Con excitatrices individuales directamente acopladas al generador principal.
• Con excitatrices individuales accionadas por motores alimentados por generadores auxiliares.
Determinación de los parámetros dinámicos de máquinas síncronas por medio de un programa de computadora digital
2.3 MICRO MÁQUINAS SÍNCRONAS DE LABORATORIO
Las micromáquinas síncronas de laboratorio son máquinas específicas diseñadas a “escala” con el fin de reproducir el comportamiento de una máquina de mucho mayor capacidad como puede ser un generador síncrono de una planta de generación real de gran capacidad; esto quiere decir que las micromáquinas guardan una relación de similaridad con respecto a las máquinas de mayor capacidad, lo que se refleja en una proporción entre las relaciones de los parámetros ambas máquinas. A partir de esto se deduce que al obtener los parámetros de una micromáquina síncrona de laboratorio se tiene una referencia para simular, de manera similar, la operación de una máquina real, razón por la cual es de gran ayuda contar con un simulador experimental para realizar este tipo de pruebas a fin de tomar las decisiones adecuadas en un caso real.
El Simulador Experimental del Sistema Eléctrico de Potencia de los Laboratorios Pesados II la Escuela Superior de Ingeniería Mecánica y Eléctrica Zacatenco es un proyecto de importantes dimensiones y cuenta con modelos físicos de elementos de transmisión (líneas y transformadores) y cargas eléctricas estáticas de impedancia constante (resistivas, capacitivas e inductivas) además de contar con dos micromáquinas: una de polos lisos y una de polos salientes adquiridos por la ESIME en el año de 1971 en coordinación con la UNESCO y diseñado por ALSTHOM de París, Francia, y que actualmente están destinadas para investigación de fenómenos dinámicos del grupo de investigación de la SEPI-ESIME, dichas micromáquinas son equipo escasamente diseñado en la actualidad, además de costoso[Ruiz et al., 2007].
En la figura 2.9 se muestran las micromáquinas del Simulador Experimental del Sistema Eléctrico de Potencia mencionadas [Ruiz et al., 2007] y en la Tabla 2.1 los datos originales de placa [Mejía y Trinidad, 2007]. En la actualidad las máquinas se operan a 60 Hz.
1628 105,99
160 645 160
217.5 447.5
445
37.5 370 37.5 625 305 320 245 674 Ø 5 00 288.3 665.5 14 4 25 6 400 685
ARREGLO DE POLOS CON TERMINALES
M20A. ESP
VER COTA FINAL DE REFERENCIA
4 trans Ø 20 ZOCLO No25250
REO444+R51 DISC OS DE IN ER C IA
Bornes de conexión
del estator B
ornes de conexion del rotor
Peso 4 5 0 kg
Capítulo 2: La Máquina Síncrona
Los datos de placa de las micromáquinas del laboratorio son:
Tabla 2.1 Datos de placa de los generadores [Mejía y Trinidad, 2007].
Parámetro Máquina de polos lisos Máquina de polos salientes
Tipo M20AT1 M20AT1
Núm. 146883 146884
Tensión 190/250 V 190/250 V
Velocidad 1500 r.p.m. 1500 r.p.m.
F. P. 0.8 0.8
Frecuencia 50 Hz 50 Hz
Servicio S1 S1
Excitación Separada 120V C.D. Separada 120V C.D.
2.4 MODELOS DINÁMICOS DE LAS MÁQUINAS SÍNCRONAS DE ACUERDO A SU ESTRUCTURA
Físicamente, un generador síncrono trifásico, consiste en tres devanados de fase en el estator (miembro fijo) y un devanado de campo en el rotor (miembro rotatorio) y hay también un buen número de devanados de amortiguamiento en el rotor y conectados todos juntos por anillos continuos o segmentos. Los devanados de fase están distribuidos de manera espaciada en las ranuras del estator y separados uno del otro 120º eléctricos. Basándose en la construcción del rotor, se pueden tener máquinas de polos salientes o de polos lisos. En máquinas de rotor cilíndrico, el cuerpo del rotor es de acero forjado con ranuras uniformemente espaciadas situadas en la periferia, sin embargo, en las de polos salientes el cuerpo del rotor está formado por polos laminados salientes circundados por el devanado de campo.
El eje magnético del devanado de campo es mínimo, sin embargo, el eje de simetría de un polo del campo, o eje polar, se define como el eje directo y se abrevia como eje d. El eje de simetría entre dos polos es conocido como eje interpolar y está situado a 90º del eje interpolar y es llamado también eje de cuadratura y se abrevia como eje q. El devanado de campo es excitado con corriente directa con lo que se establece el flujo principal en el devanado de campo a lo largo del eje d. Este flujo es responsable de inducir la f.e.m en los devanados del estator a 90º eléctricos. Así, el voltaje de la máquina es primeramente inducido a lo largo del eje q. La fig. 2.10 describe esquemáticamente una máquina trifásica desde el punto de vista de la teoría de circuitos. El devanado de campo se muestra situado en el eje d mientras que un número de devanados equivalentes del rotor están situados tanto en el eje d como en el eje q y reflejan el efecto de las corrientes inducidas en las barras de amortiguamiento y en el cuerpo sólido del rotor.
Determinación de los parámetros dinámicos de máquinas síncronas por medio de un programa de computadora digital
Cada devanado de fase tiene una resistencia “r”, se a sume que es la misma para las tres fases. Las tres fases y el devanado de campo se identifican con los subíndices a, b, c y fd respectivamente. Los devanados del estator están acoplados magnéticamente uno a otro así como cada circuito del rotor en ambos, el eje-q y el eje-q. [Pavella y Murthy, 1994].
Figura 2.8: Representación de la máquina síncrona para desarrollo matemático. El acoplamiento entre los devanados de fase y los circuitos del rotor no se muestra a fin de evitar confusiones
(Adaptada de [Pavella y Murthy, 1994]).
Capítulo 2: La Máquina Síncrona
[Dandeno, 1983], ya que el rotor de este tipo de máquinas es sólido y durante el período transitorio circulan en el corrientes que pueden ser representadas en el modelo por "n" circuitos equivalentes del rotor en ambos ejes directo y en cuadratura.
Actualmente, se considera que un modelo que representa el devanado de campo en el eje directo y dos devanados de amortiguamiento, uno en el eje directo y otro en el eje en cuadratura, es adecuado para representar a un generador de polos salientes con el rotor laminado [IEEE, 1991, Ruiz y Olguín, 1995, Ruiz, 1996]. Esto se debe a que este tipo de generadores son construidos usualmente con barras de cobre localizadas en las caras polares. Estas barras de amortiguamiento están conectadas con anillos continuos y, por lo tanto, forman un circuito de amortiguamiento de jaula de ardilla que es efectivo en ambos ejes (directo y en cuadratura). Dado que este devanado es el único circuito físico presente en el eje en cuadratura, un solo devanado de amortiguamiento en el eje q lo describe adecuadamente. Este modelo es conocido como modelo 2.1 ya que representa dos circuitos equivalentes en el eje d y un circuito equivalente en el eje q del rotor.
En el caso de las máquinas de polos lisos, un modelo 2.2 puede describir por lo general la inductancia operacional en los ejes directo y cuadratura de manera adecuada para estudios de estabilidad transitoria, cuando en el rotor no existan barras conductoras bajo las cuñas de las ranuras, y cuando la región de la cara polar se encuentra sin cuñas o barras de amortiguamiento [IEEE, 1991].
Modelos más complejos en el eje q como el modelo 2.3 o el modelo 3.3 son recomendados para estudiar el amortiguamiento del sistema o fenómenos como la resonancia subsíncrona en generadores en los que el rotor está ranurado longitudinalmente y en estas ranuras tiene cuñas de acero de baja conductividad o cuñas de material conductor, en el caso de máquinas sujetas a la resonancia subsíncrona. Este tipo de modelos tiene un mejor ajuste que el modelo 2.2 de la impedancia operacional en el eje q, incluyendo el ángulo de fase, en el rango de 0.1 Hz a 10 Hz [IEEE, 1991].
Una de las principales restricciones en la elección del modelo de la máquina síncrona es la disponibilidad de los parámetros. Debido a que el modelo 2.2 es en general adecuado para estudios de estabilidad transitoria en los que el sistema tiene desviaciones pequeñas de la frecuencia a 60 Hz, y a que los datos de este modelo pueden ser obtenidos (aunque de manera indirecta) utilizando el procedimiento de prueba convencional [IEEE, 1995] o son proporcionados por el fabricante, en el presente trabajo se representan los turbogeneradores por un modelo de este tipo.
C
APÍTULO
3:
P
RUEBAS PARA
D
ETERMINAR LOS
P
ARÁMETROS
DE LA
M
ÁQUINA
S
ÍNCRONA
3.1 INTRODUCCIÓN
La gran mayoría de las fallas que ocurren en un sistema de potencia real son asimétricas. Sin embargo, el estudio de la falla trifásica simétrica es importante debido a que, si bien es rara su aparición, es mucho más severa desde el punto de vista de la estabilidad de sistemas eléctricos de potencia. Además en este estudio está basada la prueba de corto circuito del generador en vacío, la cual es un método bien establecido para obtener los parámetros dinámicos del mismo [IEEE, 1995].
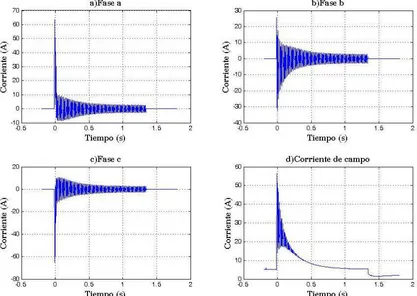
Al aplicar un cortocircuito trifásico a las terminales de un generador síncrono que gira en vacío a la velocidad nominal y tiene un voltaje terminal dado, se producen corrientes en las fases del generador y en el devanado de campo similares a las mostradas en la figura 3.1.
Determinación de los parámetros dinámicos de máquinas síncronas por medio de un programa de computadora digital
Como se puede observar en la figura 3.1, la respuesta de la máquina ante el cortocircuito es compleja. Las diferencias apreciables y el comportamiento en general de las corrientes de cortocircuito de fase se pueden explicar como una variación continua de la reactancia efectiva de la máquina en el tiempo vista desde la red. Determinar la expresión para una reactancia de este tipo es muy complicado.
El enfoque de estudio que se ha utilizado para analizar este problema complejo consiste en hacer una división del problema por períodos de tiempo, considerando que dentro de cada período se tiene una reactancia diferente que es constante. La corriente de corto circuito se ha dividido entonces en tres períodos básicos llamados subtransitorio, transitorio y permanente. Estos períodos están relacionados con los períodos de tiempo utilizados aún hoy en día para seleccionar interruptores (momentáneo, interruptivo y permanente), debido a que esta fue la primera aplicación de este análisis, y se ha observado que estas componentes existen de manera general en las corrientes de cortocircuito de sistemas de CA.
La descomposición de la corriente de cortocircuito de una fase en sus diferentes componentes básicos se muestra en la figura 3.2.
Capítulo 3: Pruebas para determinar los parámetros de la máquina síncrona
Se pueden observar en la figura 3.2 las siguientes características importantes de la corriente de cortocircuito y sus componentes:
• La corriente de cortocircuito está formada por una componente constante (la corriente de cortocircuito permanente) y tres componentes de corriente que decaen en el tiempo. Una componente es una corriente de CD, mientras que dos componentes son de CA.
• Para cada una de las componentes de corrientes de cortocircuito de CA se definen reactancias constantes permanente, transitoria y subtransitoria.
• La suma de las tres componentes de corriente de CA (permanente, transitoria y subtransitoria) es una corriente simétrica con respecto del eje de tiempo. Las importantes diferencias observadas entre las corrientes de fase de la figura 3.1 son debidas a la componente de CD.
• Los períodos de tiempo en los que decaen las componentes subtransitoria, transitoria y de CD están claramente establecidos y pueden ser determinados por constantes de tiempo específicas para cada componente. La constante de tiempo subtransitoria siempre es menor que la transitoria.
El uso de estas componentes para analizar las corrientes de cortocircuito ha sido comprobado teórica y prácticamente a través de los años. Las condiciones de operación de la máquina (velocidad constante del rotor) en este caso en particular permiten que sea aplicable el principio de superposición y que la respuesta sea la suma de las diferentes componentes [Adkins y Harley, 1975]. En la parte restante del este capítulo se describirán en más detalle cada uno de los conceptos antes mencionados y las pruebas de laboratorio necesarias para determinar los parámetros.
3.2 COMPONENTES DE CD DE LA CORRIENTE DE CORTOCIRCUITO
Como se ha mencionado en la sección anterior, y se puede observar en la figura 3.1, al aplicar un corto circuito trifásico a una máquina síncrona en vacío, se observa que la asimetría ocasionada porque la componente de CD es diferente para cada fase.
La componente de corriente directa se puede explicar por el teorema de los enlaces de flujo constantes que dice [Kimbark, 1956]:
“Los enlaces de flujo de cualquier circuito cerrado de resistencia y fuerza electromotriz finitas no puede cambiar instantáneamente”.
Determinación de los parámetros dinámicos de máquinas síncronas por medio de un programa de computadora digital
Figura 3.3: Circuito básico para demostrar el teorema de los enlaces de flujo constantes (Adaptado de [Kimbark, 1956]).
En la figura 3.3 circula inicialmente una corriente i en la bobina que está conectada a una batería con una tensión E. En condiciones iniciales, el brazo móvil del núcleo de la bobina está cerrado y todas las variables son constantes.
En un momento dado, uno de los extremos del brazo móvil se jala y se separa del núcleo magnético principal. Esta acción hace que se produzca un cambio importante en la inductancia. Como los enlaces de flujo no pueden cambiar de forma instantánea, la corriente experimenta un cambio en magnitud y dirección que compensa el cambio en la inductancia y hace que en el instante en que se cambia la inductancia del circuito, los enlaces de flujo del mismo sean constantes e iguales a los del circuito original. A partir de este cambio inicial, la corriente decae hasta su valor original.
En la figura 3.3 se muestra que si se deja que el brazo del núcleo se acerque nuevamente al núcleo magnético principal, la corriente tiene un comportamiento muy similar, pero de dirección opuesta al primer cambio, debido a que el cambio en la inductancia en este caso es de sentido opuesto.
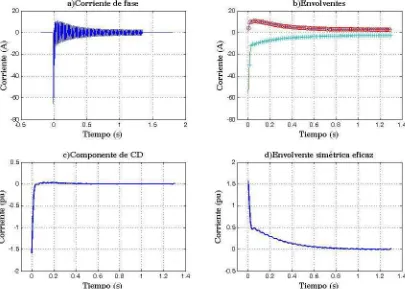
En la máquina síncrona, las diferencias en las componentes de CD de las fases se deben a que el valor de los enlaces de flujo en el momento de la falla es diferente para cada una de ellas [Kimbark, 1956]. En la figura 3.4 a) se muestran las componentes de CD y en la 3.4 b) sus valores iniciales para las corrientes de cortocircuito presentadas en la figura 3.1
a) b)
Capítulo 3: Pruebas para determinar los parámetros de la máquina síncrona
3.2.1 Conceptos fundamentales de las constantes de tiempo
A pesar de que el teorema de los enlaces de flujo constantes es útil para encontrar los valores iniciales de las corrientes transitorias, no indica la velocidad a la que decaen. En circuitos lineales con capacitancia cero, las corrientes transitorias consisten en componentes que decaen exponencialmente. La velocidad con que decae cada componente puede ser expresada en términos de constantes de tiempo.
( ) ( )
0 tTi t =i ε− (3.1)
Donde i(t) es la corriente transitoria en cualquier momento. i(0) es el valor de la corriente inicial i(t) en t = 0. T es la constante de tiempo.
El significado físico de la constante de tiempo es que en el tiempo t = T, la corriente transitoria cae desde su valor inicial hasta ε-1, es decir, 0.368 de su valor inicial. La velocidad a la que disminuye en cualquier momento es:
( )
( )
0 ( )t T
i
d i t
i t
dt T T
ε−
= − = − (3.2)
Si esta velocidad continua sin cambio alguno, la corriente podría caer hasta cero en un intervalo de tiempo T.
La constante de tiempo de una curva exponencial puede ser definida en cualquiera de las siguientes formas [Kimbark, 1956]:
• El tiempo en el que la variable disminuya a 0.368 de su valor inicial ó
• el tiempo en que la variable llegue a cero si continúa decayendo a su velocidad inicial. Ambas definiciones se pueden observar en la figura 3.5. Al tiempo T la curva ha disminuido al 0.368 de su valor inicial y al mismo tiempo la tangente a la curva, del punto inicial, interfecta al eje horizontal.
Para interpretar lo antes mencionado, cualquier punto de la curva puede ser tomado como punto inicial.
Determinación de los parámetros dinámicos de máquinas síncronas por medio de un programa de computadora digital
Figura 3.5: Caída exponencial de la corriente (Adaptada de [Kimbark, 1956]).
Figura 3.6: Gráfica exponencial en escala semilogarítmica (Adaptada de [Kimbark, 1956]).
Se puede demostrar que al aplicar logaritmos a la ecuación (3.1), esta se transforma en:
( )
( )
1 log(i t ) log( 0 )i tT −
= + (3.3)
La cual es la ecuación de una recta con ordenada al origen de la formay= +B mX, a partir de la cual se pueden calcular fácilmente los valores principales de (3.1) en función de su ordenada al origen B y su pendiente m como:
B = log(i(0)) = valor inicial de la corriente
Capítulo 3: Pruebas para determinar los parámetros de la máquina síncrona
3.3 COMPONENTES DE CA DE LA CORRIENTE DE CORTOCIRCUITO
Se puede observar en la figura 3.2 que si se elimina la componente de CD de cada una de las corrientes de cortocircuito de fase, las corrientes resultantes de CA son simétricas con respecto al eje de tiempo y están formadas por tres componentes principales: subtransitoria, transitoria y permanente. Es por esta razón que al determinar los parámetros de la máquina se elimina la componente de CD de la corriente original de corto circuito.
Después de que se obtiene la corriente de cortocircuito simétrica, su análisis requiere descomponer esta corriente en sus componentes principales. Esto se lleva a cabo trabajando con las envolventes de la corriente simétrica de CA. Las envolventes son gráficas que unen los puntos máximos (envolvente superior) y mínimos (envolvente inferior) de la corriente de falla. En particular se trabaja con la envolvente superior, la cual es similar a la presentada en la figura 3.7, obtenida para las corrientes de cortocircuito presentadas en la figura 3.1.
Figura 3.7: Gráfica exponencial en escala semilogarítmica (Adaptada de [Kimbark, 1956]).
Las componentes subtransitoria y transitoria decaen con el tiempo y en ellas se aplica el concepto de las constantes de tiempo presentado en § 3.2.1. La componente permanente, por el contrario, es constante. Las componentes de corriente de CA se pueden definir, a partir de la figura, de la siguiente forma:
' "
Total de CA s
I = + +I I I (3.4)
donde Is = corriente permanente de cortocircuito.
I’ = corriente transitoria de cortocircuito. I” = corriente subtransitoria de cortocircuito. Las cuales a su vez, están definidas como:
'
' 0
'
t T
I =I e− (3.5)
"
" 0
"
t T
I =I e− (3.6)
donde T' es la constante de tiempo transitoria.
"
T es la constante de tiempo subtransitoria.
' 0
I es el valor inicial de la componente transitoria de corriente.
" 0
Determinación de los parámetros dinámicos de máquinas síncronas por medio de un programa de computadora digital
Las constantes de tiempo transitoria y subtransitoria reflejan el grado de decaimiento en el tiempo de sus respectivas componentes de corriente. Los parámetros que se obtienen de la prueba se pueden explicar de manera más clara calculando la expresión de la corriente de cortocircuito a partir del modelo general de la máquina. Esto se presenta en la siguiente sección.
3.4 EXPRESIÓN ANALÍTICA PARA EL CÁLCULO DE LA CORRIENTE DE CORTOCIRCUITO
Como se mencionó en § 3.1, las condiciones de prueba permiten hacer simplificaciones importantes en el análisis. Al asumir que la velocidad del rotor durante la prueba es constante, las ecuaciones del modelo general de la máquina resultantes en este estudio son lineales, por lo que se pueden resolver por el principio de superposición y la transformación de Laplace [Adkins y Harley, 1975]. La expresión resultante de la corriente de cortocircuito para la corriente de fase “a” de una máquina es (las otras corrientes solamente se obtienen desfasando la presente 120 grados)[Adkins y Harley, 1975]:
(
)
' ''
0
1 1 1 1 1
cos ' '' ' d d t t T T a m
d d d d d
i U t
X X X ε X X ε ω λ
− −
⎡ ⎛ ⎞ ⎛ ⎞ ⎤
= ⎢ +⎜ − ⎟ +⎜ − ⎟ ⎥ +
⎝ ⎠ ⎝ ⎠
⎣ ⎦
corriente simétrica de CA
ε cosλ
'' 1 '' 1 2 a T t q d m X X U − ⎟ ⎟ ⎠ ⎞ ⎜ ⎜ ⎝ ⎛ +
− componente de CD
0
1 1
cos(2 )
2 '' ''
a t T m d q U t X X ε ω λ
−
⎛ ⎞
− ⎜⎜ − ⎟⎟ +
⎝ ⎠
componente de doble frecuencia (3.7)
donde Um es el voltaje en las terminales de la máquina antes del cortocircuito.
λ es el ángulo de defasamiento al inicio del cortocircuito. X”q es la reactancia síncrona en el eje en cuadratura1.
Los parámetros de la máquina obtenidos en la prueba son:
Xd, X’d, X”d: Reactancias síncrona, transitoria y subtransitoria en el eje directo.
T’d, T”d: Constantes de tiempo transitoria y subtransitoria de cortocircuito
en el eje directo.
Ta: Constante de tiempo de armadura.
Los ejes directo y cuadratura forman el marco de referencia en el que se expresa el modelo de la máquina, como se describió en § 2.4. Estos parámetros (reactancias y constantes de tiempo) son conocidos como el conjunto de parámetros estándar, debido a que pueden ser determinados por medio de la prueba convencional de cortocircuito.
1
Capítulo 3: Pruebas para determinar los parámetros de la máquina síncrona
En la ecuación (3.7) se pueden observar las expresiones necesarias para relacionar los valores de las mediciones con los parámetros de la máquina. Es importante mencionar que estas pruebas solamente permiten determinar un subconjunto de los parámetros dinámicos completos de la máquina. Esto se explica en la Tabla 3.1, en la cual se presentan el conjunto completo de parámetros dinámicos eléctricos de las máquinas síncronas de polos lisos y polos salientes, y se indican en negritas, los parámetros que pueden ser determinados con la prueba de cortocircuito.
Los parámetros de las máquinas síncronas se pueden relacionar, como se muestra en la Tabla 3.1, con los devanados que forman el modelo de la máquina síncrona. Esta característica de los parámetros se muestra en las figuras 3.8 a 3.10. En estas figuras se presenta que en los diferentes períodos de tiempo subtransitorio, transitorio y permanente, los enlaces de flujo de la máquina están relacionados con el efecto de un devanado en especial (ya sea físico o derivado del modelo, ver § 2.4).
De esta manera, las reactancias subtransitorias están relacionadas con el efecto de los devanados de amortiguamiento, las transitorias con el devanado de campo, mientras que las permanentes o síncronas con el devanado de armadura del estator.
Tabla 3.1: Parámetros dinámicos estándar de las máquinas síncronas y su relación con los devanados del modelo*.
1 2 3 4
Parámetro Máquina de polos lisos (modelo 22)
Máquina de polos salientes (modelo 2.1)
Devanado
Ta Si Si
Xd Si Si
Xq Si Si
Armadura
X’d Si Si
T’d Si Si
Campo (rotor)
X’’d Si Si
T’’d Si Si
Primer devanado de amortiguamiento en el eje directo
(rotor)
X’’q Si Si
T’’q Si Si
Primer devanado de amortiguamiento en el eje en
cuadratura (rotor)
X’q Si No
T’q Si No
Segundo devanado de amortiguamiento en el eje en
Determinación de los parámetros dinámicos de máquinas síncronas por medio de un programa de computadora digital
(a) X”d (b) X”q
Figura 3.8: Flujo magnético de la máquina síncrona para la corriente de subtransitoria de cortocircuito. a) Reactancia subtransitoria en el eje directo (X”d ) y b) Reactancia subtransitoria en el eje en cuadratura (X”q)
(Adaptada de [Kimbark, 1956]).
(a) X’d (b) X’q
Figura 3.9: Flujo magnético de la máquina síncrona para la corriente transitoria de cortocircuito. a) Reactancia transitoria en el eje directo (X’d ) y b) Reactancia transitoria en el eje en cuadratura (X’q)
(Adaptada de [Kimbark, 1956]).
(a) Xd (b) Xq
Figura 3.10: Flujo magnético de la máquina síncrona para la corriente de cortocircuito permanente. a) Reactancia síncrona en el eje directo (Xd ) y b) Reactancia síncrona en el eje en cuadratura (Xq)
Capítulo 3: Pruebas para determinar los parámetros de la máquina síncrona
3.5 PRUEBA DE LABORATORIO
El diagrama físico de conexiones de esta prueba es el mostrado en la figura 3.11. El procedimiento de prueba es el siguiente [IEEE, 1995, Mejía y Trinidad, 2007]:
• Se conecta a un interruptor normalmente abierto que pone las fases de la máquina en cortocircuito, un dispositivo de control que permite hacer el cierre de este dispositivo simultáneamente para cada fase. La descripción del dispositivo que controla la duración y aplicación del cortocircuito se hace en el Apéndice de [Mejía y Trinidad, 2007].
• Para registrar las corrientes de cortocircuito se conecta, por medio de transformadores de corriente (transductores), un canal del osciloscopio a cada una de las fases y al devanado de campo.
• El primo motor de CD del generador síncrono es controlado por un variador de velocidad (drive) de CD. Se arranca la máquina y se lleva a la velocidad síncrona. • Una vez que la máquina se encuentra a la velocidad síncrona se alimenta el devanado
de campo por medio de una fuente de CD hasta tener el 30 o 100 % de la tensión nominal entre fases.
• En el momento programado, se activa el controlador que aplica el cortocircuito trifásico a la máquina por el tiempo preestablecido.
Figura 3.11: Diagrama Físico de conexiones para las pruebas de Cortocircuito Repentino aplicado a las dos Micromáquinas del simulador [Mejía y Trinidad, 2007].
Determinación de los parámetros dinámicos de máquinas síncronas por medio de un programa de computadora digital
Los resultados de las pruebas utilizados en el presenta trabajo fueron obtenidos en [Mejía y Trinidad, 2007]. Los detalles específicos de la realización de las pruebas se pueden consultar en ese trabajo de tesis, complementario al presente.
C
APÍTULO
4:
P
ROGRAMA DE
C
OMPUTADORA
D
IGITAL
4.1 INTRODUCCIÓN
El programa de computadora digital para el análisis del generador síncrono está basado en los procedimientos de prueba y métodos para determinar los parámetros dinámicos del generador indicados en la norma internacional IEEE Std 115-1995 [IEEE, 1995]. En este capítulo en particular se describe la metodología para la implementación de dicho programa y el funcionamiento del mismo.
4.2 ESTRUCTURA DEL PROGRAMA
Para poder implementar un programa digital para el análisis del comportamiento del generador síncrono se utilizará la metodología especificada para este caso en la norma IEEE 115-1995 [IEEE, 1995] y el artículo [Kamwa y otros, 1995] que dictan los siguientes pasos a seguir: 1. Búsqueda de los puntos pico correspondientes a las envolventes superior e inferior.
Usando un algoritmo simple para la búsqueda de puntos, se determinan los puntos pico de tiempo y corriente, (Ts,Is) y (Ti.Ii) de las envolventes superior (subíndice “s”) e inferior (subíndice “i”) para cada onda de corriente de fase. El tiempo y la corriente están dados en segundos y kA respectivamente.
2. Sincronización de la envolvente. Los puntos pico que componen las envolventes superior e inferior obtenidos en el paso anterior no tienen correspondencia entre sí para un mismo instante de tiempo, lo que hace simplemente imposible su adición o sustracción para hallar las componentes de CD de la curva de corriente original. Para resolver este problema, se pueden hacer cualquiera de las siguientes aproximaciones:
a) Ajustar cada envolvente a una función polinomial P = f(i) de orden superior. Si el mismo orden es ajustado para las dos envolventes, entonces se pueden realizar las operaciones algebraicas usando los modelos polinomiales superior e inferior Ps y
Pi obtenidos.
Determinación de los parámetros dinámicos de máquinas síncronas por medio de un programa de computadora digital
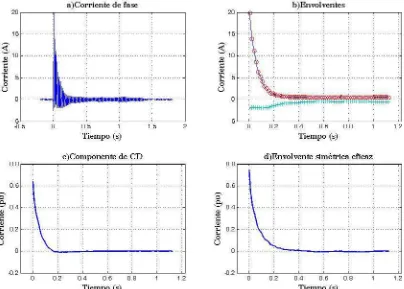
envolvente superior que se ajuste en el mismo tiempo con el punto existente en la envolvente inferior. Se procede de manera similar para los puntos faltantes de la envolvente inferior. Un ejemplo de los datos obtenidos para las envolventes, obtenidas por medio de interpolación por splines, se muestra en la figura 4.1.
Figura 4.1: Datos para el análisis automático (adaptada de [Kamwa y otros, 1995]).
___Envolventes superior e inferior ----Componente simétrica
-.-.-.-Componente de CD
3. Obtención de la componente de CD. Una vez que los puntos de las componentes superior e inferior han sido determinados para los mismos instantes de tiempo, la componente simétrica en p.u. de la corriente de cortocircuito se determina por:
[
]
n ss n i s I I I t I t I ti = − −
2 2 ) ( ) ( )
( (4.1)
y la componente de CD, también en p.u. por:
[
]
n i s dc I t I t I t i 2 2 ) ( ) ( )( = + (4.2)
Capítulo 4: Programa de Computadora Digital
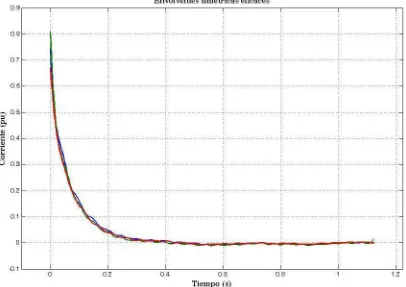
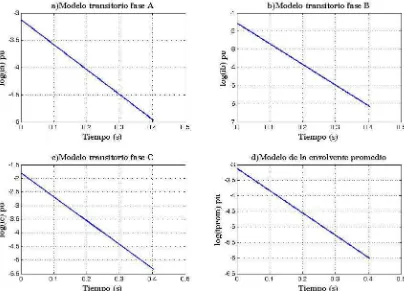
4. Modelo Transitorio Lineal. Se asume que después de N2 ciclos, los efectos subtransitorios y del devanado de armadura (la corriente de doble frecuencia) han desaparecido completamente o se han reducido a niveles insignificantes. Entonces la señal i(t) de N2 hasta N3 ciclos consiste solamente de una constante de tiempo que corresponde a los efectos transitorios. Se puede ajustar un modelo logarítmico lineal a estos datos utilizando la regresión lineal, cuando t está en el intervalo [N2:N3]:
' ' ) ( log 0 ) ( '
logΔi t i t = At+B (4.3)
Aplicando este modelo a los datos de la figura 4.1 Entre N2=10 (0.16 s) y N3=158 (2.63 s), se obtiene: A’=-0.6661 y B’=-0.5471. El ajuste de este modelo se ilustra en la figura 4.2.
Figura 4.2: Estado transitorio (adaptada de [Kamwa y otros, 1995]).
___Modelo oooPrueba
Los parámetros transitorios en p.u. y segundos se determinan por:
' 1 '
A
T d =− (4.4)
'
) 0 (
' eB
i = Δ (4.5) ⎥⎦ ⎤ ⎢⎣ ⎡Δ + = n ss n d I I i V V x ) 0 ( ' ' 0 (4.6)
Determinación de los parámetros dinámicos de máquinas síncronas por medio de un programa de computadora digital
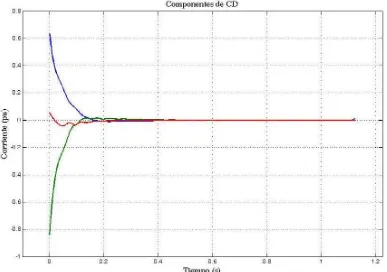
5. Modelo Subtransitorio Lineal. Ahora que se conoce bien el comportamiento transitorio determinado en el paso anterior, su efecto puede ser eliminado de los datos originales antes de continuar con el análisis:
) ' ' exp( ) ( ) ( ' ) ( ) (
'' t i t i t i t At B
i = −Δ = − +
Δ (4.7)
Asumiendo que los efectos subtransitorios predominan sobre los efectos de la armadura para los primeros N1 ciclos, un modelo con una sola constante de tiempo puede ser ajustado para Δi''(t), cuando t está en el intervalo [0:N1]:
'' '' ) ( ''
logΔi t = A t+B (4.8)
Para los datos de la figura 4.1, con N1 = 3, se obtienen A’’ = 13.9119 y B’’ = -0.0050. El resultado se muestra en la figura 4.3. Los parámetros subtransitorios están determinados por:
'' 1 ''
A
T d =− (4.9)
''
) 0 ( '' eB i =
Δ (4.10)
⎥⎦ ⎤ ⎢⎣ ⎡Δ +Δ + = n ss n d I I i i V V x ) 0 ( ' ) 0 ( '' ' 0 (4.11)
Figura 4.3: Estado Subtransitorio (adaptada de [Kamwa y otros, 1995]).
Capítulo 4: Programa de Computadora Digital
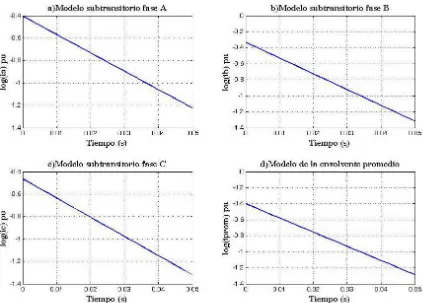
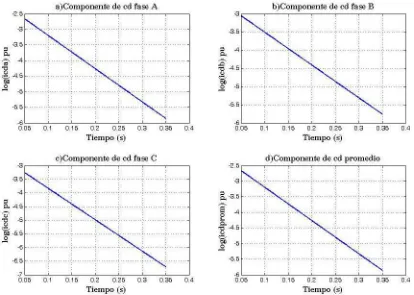
6. Modelo lineal de la componente de CD. Habiendo asumido que los efectos subtransitorios y transitorios predominan en los rangos [0:N1] y [N2:N3] de t respectivamente, se concluye que los efectos de la armadura, que determinan el comportamiento principal de la componente de CD, son más activos entre N1 y N2 ciclos. Entonces puede ser ajustado para idc(t) un modelo con una sola constante de tiempo en forma logarítmica lineal de la siguiente forma, cuando t está en el intervalo [N1:N2]:
cc cc
cc t A t B
i
abs( ( ))= +
log (4.12)
Para los datos de la figura 4.1, el análisis estadístico provee los valores Acc=-3.9532 y Bcc=-0.8961. Se puede observar en figura 4.4 que este modelo
exponencial se compara bastante bien con los datos originales en el intervalo [N1:N2]. Los parámetros en p.u. y segundos se determinan por:
cc a
A
T =− 1 (4.13)
) exp( )
0
( cc
dc B
i = (4.14)
Figura 4.4: Componente de CD (adaptada de [Kamwa y otros, 1995]).
___Modelo oooPrueba