Geometría en el espacio pdf
Texto completo
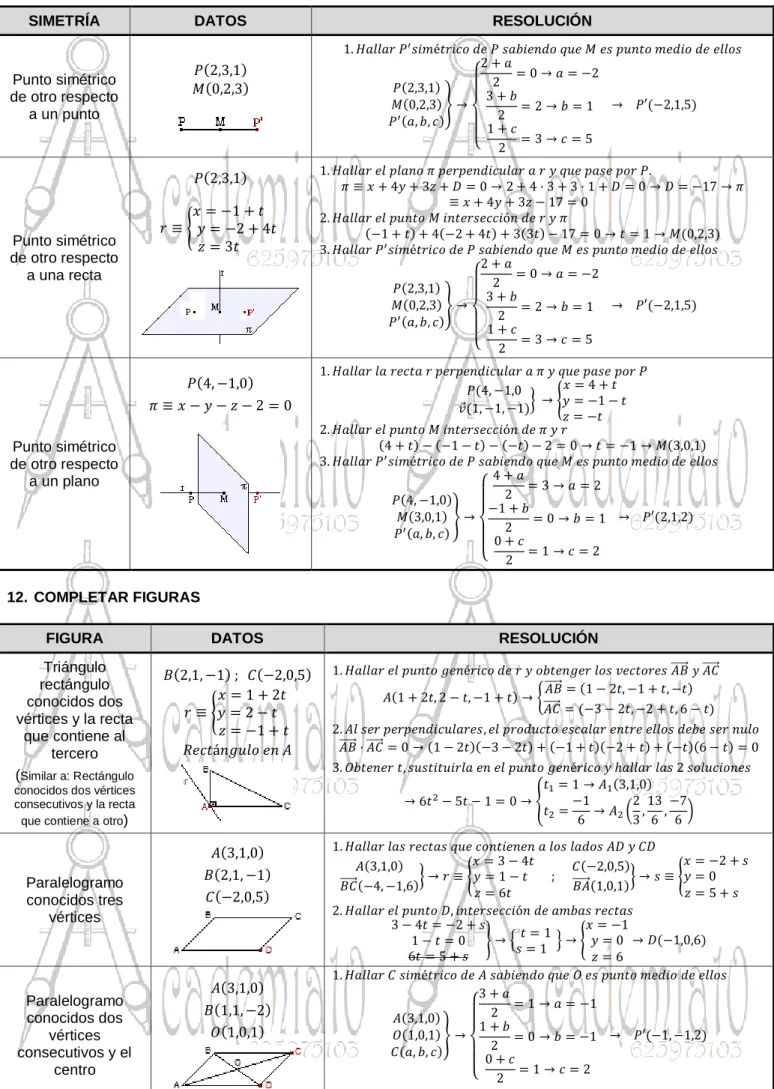
Figure
Documento similar
¿Cómo se traduce la incorporación de ésta en la idea de museo?; ¿Es útil un museo si no puede concebirse como un proyecto cultural colectivo?; ¿Cómo puede ayudar el procomún
Porcentaje de radiación solar interceptada (RSI; 0,35 - 2,5 µm) y de radiación fotosintéticamente activa interceptada (RFAI) a lo largo del ciclo de cultivo para las
“La unificación de la clasificación de empresas otorgada por las CC.AA.”, “La unificación de criterios en la acreditación de los servicios de prevención de riesgos
Volviendo a la jurisprudencia del Tribunal de Justicia, conviene recor- dar que, con el tiempo, este órgano se vio en la necesidad de determinar si los actos de los Estados
4.- Másteres del ámbito de la Biología Molecular y Biotecnología (9% de los títulos. Destaca el de Biotecnología Molecular de la UB con un 4% y se incluyen otros
Pero cuando vio a Mar sacar el fuego de bajo su ala, voló de vuelta a su tribu a contarles lo que había visto.... Justo antes de que el sol saliera, Tatkanna se despertó y comenzó
- Un curso formativo para los técnicos de laboratorio de la UPV sobre la prevención de los residuos en los laboratorios, que se llevará a cabo los días 23, 24, 25, 26 y 27
1. LAS GARANTÍAS CONSTITUCIONALES.—2. C) La reforma constitucional de 1994. D) Las tres etapas del amparo argentino. F) Las vías previas al amparo. H) La acción es judicial en
