INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA
MECANICA Y ELÉCTRICA
DISEÑO DE UNA INTERFAZ GRÁFICA PARA EL
CONTROL DE UNA BANDA TRANSPORTADORA
DIDÁCTICA
TESIS
QUE PARA OBTENER EL TITULO DE
INGENIERO EN CONTROL Y AUTOMATIZACION
PRESENTA
ALEJANDRO GALLEGOS MARES
ASESORES:
DEDICATORIAS
Cuando se culmina una meta tan grande, es importante saber reconocer y agradecer a todas aquellas personas que hicieron que un trabajo como éste, pudiera ser culminado. Éste trabajo está hecho con todo mi esfuerzo, trabajo y dedicación.
A mi madre
Tú me enseñaste la importancia del honor y el cumplir siempre tu palabra, con tu amabilidad y comprensión forjaste lo que soy ahora, te estoy muy agradecido, que sin tu guía y consejos no estaría donde estoy ahora. Gracias por todo siempre te recordare.
A mi padre
Quien siempre estuvo apoyándome y me enseño a nunca darme por vencido, que todo lo bueno de la vida se consigue con esfuerzo y que para todo problema siempre existe una solución.
A mi hermana Gabriela
Gracias por que siempre he podido contar con tu comprensión y apoyo, aun en los momentos más difíciles.
A mi hermana Violeta
Por brindarme tú ayuda, regaños y consejos que me ayudaron para poder continuar mi camino.
Agradezco tener una familia tan amorosa, donde todos siempre tuvieron cálidas palabras de apoyo, los quiero y admiro mucho.
A la chica Z
Porque fuiste paz en tiempos de caos, por enseñarme que el primero en que debo confiar es en mí y que es inútil compararme con otras personas ya que todos nacemos para ser diferentes.
A la doctora Esther
Por su amabilidad y enorme paciencia para apoyarme en la culminación de este trabajo, simplemente no sé cómo hizo para soportarme.
Al maestro Guilibaldo
Por ser un maestro tan recto y disciplinado, si hubiera más maestros como usted, habría mejores ingenieros.
A mis compañeros de la ESIME Mora, Iván, Rivas y Eduardo
Que sin su apoyo en el momento justo, este trabajo no hubiera estado a tiempo, gracias.
Sinceramente,
Capítulo 1
Índice
Relación de figuras ... IV
Relación de tablas ... VII
Resumen ... VIII
Introducción ... IX
Capítulo 1 Antecedentes de la interfaz ... 1
Capítulo 2 Fundamentos teóricos para el desarrollo de la interfaz gráfica ... 8
2.1 Metodología para el diseño de una interfaz ... 8
2.2 Programas especializados para el diseño de la interfaz ... 10
2.2.1 Visual basic 6.0® ... 11
2.2.2 Características de visual basic® ... 11
2.2.3 Conceptos importantes en visual basic 6.0® ... 12
2.2.4 Plataforma de visual basic 6.0® ... 12
2.2.5 Elementos de visual basic 6.0®. ... 13
2.2.6 Acceso al puerto serial a través de visual basic® ... 16
2.3 Tipos de transmisión de datos ... 18
2.3.1 Tipos de comunicaciones seriales ... 18
2.3.2 Principio de funcionamiento de la comunicación serial... 20
2.3.3 El protocolo RS-232 ... 21
2.4 Interface pic (RBS001) ... 25
2.5 Convertidor de niveles MAX232 ... 26
2.6 Convertidor USB a serial ... 27
2.7 Tarjeta de trasmisión y adquisición de datos ... 28
Capítulo 1
2.9 Banda transportadora ... 31
Capítulo 3 Diseño de la interfaz gráfica para el control de la banda transportadora. ... 35
3.1 Revisión y agrupación de los elementos individuales de la banda de transporte .. 36
3.2 Diseño de la fuente de tensión y cálculos de corriente. ... 42
3.2.1 Red eléctrica. ... 43
3.2.2 Transformadores... 44
3.2.3 Fusible. ... 44
3.2.4 Rectificador. ... 45
3.2.5 Filtro. ... 46
3.2.6 Regulador de tensión. ... 48
3.3 Diseño de la tarjeta para la recepción y emisión de datos. ... 51
3.3.1 Circuito de convertidor de recepción de datos ... 51
3.3.2 Sistema de control por medio del Interface pic ... 51
3.3.3 Etapa de potencia ... 53
3.3.4 Configuración de sensores ... 53
3.4 Diseño y programación de la interfaz gráfica ... 53
3.4.1 Puerto de comunicación ... 55
3.4.2 Modo de control ... 55
3.4.3 Habilitación de sensores ... 55
3.4.4 Habilitación y control de accionamientos ... 56
3.4.5 Control de estaciones ... 56
3.4.6 Estatus de proceso ... 56
Capítulo 1
3.4.8 Paro de emergencia ... 57
3.4.9 Control de velocidad ... 57
3.4.10 Botón de salida ... 58
3.5 Programación de la interfaz gráfica en visual basic®... 62
Capítulo 4 Resultados ... 64
4.1 Interfaz ... 64
4.1.1 Control de Velocidad ... 66
4.1.2 Paro de emergencia ... 67
4.1.3Alertas ... 68
4.2 Programación ... 68
4.3 Sensores ... 68
4.4 Tarjeta de adquisición de datos ... 69
4.5 Estimación económica ... 69
4.5.3 Fuente de alimentación... 69
4.5.2 Tarjeta de control y adquisición de datos ... 72
4.5.3 Sensores y accionamientos ... 73
4.5.4 Herramientas utilizadas ... 73
4.5.4 Costo de ingeniería ... 75
Análisis de resultados ... 76
Conclusiones ... 77
Recomendaciones para trabajos futuros ... 78
Referencias ... 79
Capítulo 1
Relación de figuras
Figura Título Página
2.1 Vista previa de la plataforma gráfica de visual basic® ... 13
2.2 Vista de la ventana de proyectos. ... 13
2.3 Vista de una forma de visual basic®. ... 14
2.4 Vista de la ventana módulo. ... 14
2.5 Proyecto de visual basic® manejando un control. ... 15
2.6 Otros comandos para el desarrollo de la interfaz. ... 15
2.7 Ventana de propiedades del control MSCOMM. ... 16
2.8 Transmisión asíncrona ... 19
2.9 Transmisión síncrona ... 20
2.10 Diagrama a bloques del interface pic al puerto serial. ... 25
2.11 Operación típica del circuito integrado MAX232. ... 26
2.12 Convertidor USB – Serial RS232 ... 27
2.13 Configuración de comunicación RS232 por medio del MAX232. ... 28
2.14 Representación de la señal de datos de la computadora al interface pic. ... 29
2.15 Representación gráfica de un sistema de potencia (puente H). ... 29
2.16 Configuración básica para la detección de un sensor infrarrojo. ... 30
2.17 Accionamientos montados en la banda transportadora. ... 32
2.18 Sensores montados en la banda transportadora. ... 34
3.1 Rueda plástica. ... 36
3.2 Pieza metálica de ensamble. ... 36
3.3 Ensamble completo. ... 36
Capítulo 1
3.5 Estación 2-Armado. ... 38
3.6 Estación 3-Clasificación. ... 39
3.7 Estación 4-Acomodo. ... 40
3.8 Estación 5-Rechazo. ... 41
3.9 Estructura básica de una fuente lineal. ... 42
3.10 Graficas de corriente alterna, antes y después de ser rectificada... 45
3.11 Graficas de la tensión antes y después de pasar por el filtro. ... 47
3.12 Diagrama eléctrico de conexión para cada regulador. ... 49
3.13 Diagrama eléctrico de la fuente para la parte de control. ... 49
3.14 Diagrama eléctrico de la fuente de alimentación. ... 50
3.15 Conexión del MAX232 con el puerto serial DB9 ... 51
3.16 Diagrama a bloques del interface pic. ... 52
3.17 Captura de la interfaz gráfica... 54
3.18 Captura puerto de comunicación. ... 55
3.19 Captura modo de control. ... 55
3.20 Captura habilitación de sensores. ... 55
3.21 Captura habilitación y control de accionamientos. ... 56
3.22 Captura control de estaciones. ... 56
3.23 Captura estatus de proceso ... 56
3.24 Captura gráfica de la banda a operar. ... 57
3.25 Captura del paro de emergencia. ... 57
3.26 Captura de la estación de control de velocidad de la cinta transportadora. ... 57
3.27 Botón de salida del programa. ... 58
Capítulo 1
3.30 Diagrama de flujo d la estación 2. ... 60
3.31 Diagrama de flujo de la estación 3. ... 61
4.1 Interfaz gráfica trabajando en modo automático. ... 64
4.2 Interfaz gráfica trabajando en modo semiautomático... 65
4.3 Interfaz gráfica trabajando en modo manual. ... 66
4.4 Velocidad de motores 1 y 2 a nivel bajo. ... 66
4.5 Paro de emergencia en estado inicial. ... 67
4.6 Aviso de activación del paro de emergencia. ... 67
4.7 Alerta de conexión no finalizada. ... 68
4.8 Sensor Infrarrojo OPB704. ... 69
Capítulo 1
Relación de tablas
Tabla Título Pagina
1.1 Interfaces gráficas a través de los años. ... 2
2.1 Función de los pines del conector DB9. ... 22
2.2 Función de los pines del conector DB25. ... 22
2.3 Accionamientos montados en la banda transportadora. ... 31
2.4 Sensores montados en la banda transportadora. ... 33
3.1 Tabla de verdad de la estación 1. ... 38
3.2 Tabla de verdad de la estación 2. ... 39
3.3 Tabla de verdad de la estación 3. ... 40
3.4 Tabla de verdad de la estación 4. ... 41
3.5 Tabla de verdad de la estación 5. ... 42
3.6 Descripción de consumo de los accionamientos. ... 43
3.7 Tabla de propiedades físicas de cables AWG, dependiendo el calibre. ... 43
4.1 Costo de materiales para la fuente de alimentación parte de control. ... 70
4.2 Costo de materiales para la fuente de alimentación parte de potencia. ... 71
4.3 Costo de materiales de las tarjetas de control para la interfaz gráfica. ... 72
4.4 Costos de sensores y accionamientos. ... 73
4.5 Costos de sensores y accionamientos. ... 74
Capítulo 1
Resumen
En este trabajo de tesis se diseñó e implementó una interfaz gráfica para el control y automatización de los accionamientos de una banda didáctica ICT1 [1] de la marca BYTRONIC®, localizada en los laboratorios de pesados I en el aula A05 de ESIME Zacatenco. Esto con el fin de reparar sus componentes actuales y mejorar la interacción con este equipo, para ser utilizada como apoyo didáctico en las diferentes asignaturas que se imparten en la Ingeniería de Control y Automatización en la ESIME Unidad Adolfo López Mateos.
Se estudió el concepto de la interfaz gráfica, además del estado del arte sobre varios tipos de interfaces existentes. Se mencionan los conceptos para el desarrollo de la interfaz, utilizando Visual Basic® como la plataforma para desarrollar el programa de la interfaz gráfica y los comandos que fueron necesarios para programarla. Los componentes electrónicos para el desarrollo de la tarjeta de adquisición de datos y controladora de los accionamientos de la banda, además de la comunicación RS-232 a utilizarse para un correcto manejo de la información entre la interfaz gráfica y la tarjeta de control, así como de los componentes con los que cuenta la banda de transporte.
Se obtuvo una interfaz gráfica capaz de controlar la banda de transporte didáctica marca BYTRONIC®, dándole más modos de operación, para que de esta forma pueda ser de ayuda como un material auxiliar didáctico en las instituciones de educación media y superior, iniciando por la reactivación de la que se encuentra en ESIME Zacatenco en los laboratorios de ICA.
Capítulo 1
Introducción
En las instituciones de educación la correcta compresión de los temas de estudio de una asignatura no siempre depende de la habilidad del profesor para expresarse, ni de las habilidades del estudiante al momento de recibir la clase, muchas veces depende de los dispositivos didácticos que permiten ejemplificar y poner en práctica lo estudiado en clase, material con el que no siempre se cuenta en la mayoría de instituciones educativas desde nivel medio superior hasta nivel superior. Otro de los problemas es no contar con lugares especializados donde estos materiales didácticos se pueden adquirir, además que la propia institución no cuenta con la suficiente solvencia económica para adquirirlos. En ocasiones se cuenta con algunos dispositivos donados por alguna institución o empresa privada, pero por el uso que se ha dado a estos se encuentran dañados o por la carencia del programa de control, los vuelve obsoletos para su propósito específico que es ser un apoyo en la fase enseñanza-aprendizaje.
Se desarrollo una interfaz gráfica para controlar la banda transportadora de una forma óptima, que sea de fácil manejo y adquisición por parte de las instancias educativas.
Que sea accesible en cuanto a uso, mantenimiento, programación y costo, y a la vez pueda ser empleada como un material auxiliar didáctico en las instituciones de educación básica a superior, iniciando por la reactivación de la que se encuentra en los laboratorios de ESIME Zacatenco, para así utilizarla en las diferentes asignaturas que se imparten en la ingeniería de Control y Automatización en la ESIME unidad Adolfo López Mateos.
Este trabajo de tesis tiene como objetivo el desarrollo de una interfaz gráfica para el control y automatización de los accionamientos de una banda didáctica marca BYTRONIC®, localizada en los laboratorios de pesados I en el aula A05 de ESIME Zacatenco, esto con el fin de optimizar sus componentes actuales y mejorar la interacción con ésta, para ser utilizada como apoyo didáctico.
Para cumplir el objetivo, este trabajo de investigación se encuentra divido en 4 capítulos, como a continuación se mencionan.
Capítulo 1
computadora personal hasta nuestros días. También se presentan las diferentes interfaces gráficas, así como los sistemas operativos que existen y en los distintos ámbitos que se desarrollan y utilizan.
En el capítulo dos se trataran y conceptos fundamentales para el desarrollo de la interfaz gráfica, los cuales parten desde la forma de planear el desarrollo de la programación y su correcta documentación, los comandos específicos en visual basic® para establecer la comunicación por la hyper-terminal de la computadora por medio del protocolo RS-232 con el interface pic RBS001 que controla la banda transportadora, como es que funciona y se configura esto, la descripción breve del interface pic como controlador de los accionamiento de la banda transportadora y el convertidor de tensión MAX-232 para hacer posible la conexión física del puerto serial (DB9) de la computadora con los pines del interface pic, así como de especificar con que elementos dispone la banda transportadora y la ubicación de cada uno de éstos en ella.
Capítulo 1
Capítulo 1
Antecedentes de la interfaz
El concepto de interfaz se ha definido, según el ámbito de conocimientos, desde varios puntos de vista: en la electrónica y las telecomunicaciones, se ha definido como “puerto a
través del que se envían o reciben señales desde un sistema o subsistemas hacia otros”.
A su vez que la definición de interfaz gráfica en el diccionario de la Real Academia Española dice que visto desde la informática que:
Interfaz. Conexión física y funcional entre dos aparatos o sistemas independientes [2].
Gráfica. Dicho de una descripción, de una operación o de una demostración que se
representa por medio de figuras o signos [3].
Interfaz gráfica de usuario, el concepto supone un tipo específico de interfaz que usa metáforas visuales y signos gráficos como paradigmas interactivos entre la persona y la computadora.
La invención de la interfaz gráfica de usuario y su reciente uso, hace carecer de una verdadera reflexión sobre su naturaleza y posibles interpretaciones. Ésta se desarrolló con el objeto de proporcionar un entorno visual sencillo para permitir la comunicación con el sistema operativo de una máquina o computadora, y se ha ido actualizando y mejorando continuamente con todas las aportaciones que se han realizado desde 1973 hasta los días actuales, cuando Xerox Alto® desarrollado por Xerox PARC®, fue el primer computador personal, así como el primero que utilizó la metáfora de escritorio y una interfaz gráfica de usuario.
La historia de la interfaz gráfica ha estado marcada en su evolución por dos factores decisivos: la investigación y el negocio. La guerra de los interfaces desde una perspectiva semi-cognitiva, es tan importante como la de sistemas operativos que operan en los sistemas informáticos actuales hace ya algunos años: poseer la interfaz, es de algún modo, tener una herramienta poderosa de control sobre las personas que la utilizan. Es definir los modelos de interacción, los signos que intervendrán y por lo tanto tendrán que ser
aprendidos por el “usuario”. Es una herramienta para limitar o dirigir las posibilidades de
Capítulo 1
Apple® o Microsoft®, Be® o Xerox®, han dominado el territorio de la interfaz demandándose unas a otras.
En la tabla 1.1, se puede apreciar la cronología de los sistemas operativos más importantes de los últimos años a nivel internacional, así como una breve descripción de ellos.
Tabla 1.1 Interfaces gráficas a través de los años.
Sistema operativo Descripción
Windows 95®
Este sistema operativo significa el inicio de Microsoft® en el mercado de los programas informáticos. Este consigue integrar en Windows 95, el sistema operativo MS-DOS con una interfaz gráfica de forma coherente. Windows 95 tiene una clara orientación a redes, por lo que se integra con el programa Internet Explorer, que sustituirá al gestor de archivos dispuesto anteriormente.
Beos®
El sistema Operativo Beos, fue desarrollado por la empresa Be Incorporated, en el año 1995, diseñado principalmente para trabajar de forma eficiente sobre aplicaciones multimedia en la plataforma BeBox, con una orientación que haría buen uso de su entorno gráfico. Incluye una barra de tareas en forma de menú, situada en la parte superior derecha, la cual incluye el logo del sistema operativo, botones especiales representando las aplicaciones activas minimizadas, y un área especial para mostrar la hora, y el uso del proceso por parte del sistema.
KDE®
El proyecto KDE (K - Desktop Environment) nació en el año 1996, dentro del contexto del software libre, de mano del desarrollador alemán Matthias Ettrich. El sistema de ventanas KDE (K desktop Environment) es lanzado en su primera versión dos años más tarde. El objetivo del proyecto es desarrollar un interfaz gráfico que opere sobre sistemas operativos Unix, especialmente GNU/LINUX y que posibilite un método de interacción amigable con la computadora similar a los que ofrecen Windows o Mac OS en otras plataformas.
Al contrario de lo que ocurre en la interfaz de Windows, KDE activa en el escritorio las aplicaciones bajo una sola pulsación de ratón, y no dos, como es habitual en otras plataformas. Esto hace del interfaz más coherente con los modelos de interacción provenientes del Web, los cuales están basados en hipervínculos, normalmente activados con una sola pulsación.
GNOME®
Capítulo 1
MAC OS X®
El sistema operativo MAC OS X fue lanzado con las computadoras Apple Macintosh en el año 2001, y su arquitectura está basada en tecnología Unix al contrario de sus versiones anteriores. MAC OS X, no sólo cambia su arquitectura interna, sino además renuncia a toda la iconografía desarrollada hasta el momento para introducir un nuevo entorno gráfico denominado “Aqua”, el cual e inspira en las formas sinuosas del agua del mar.
El menú superior clásico de acceso global, donde se posiciona en forma de menú textual las variables más importantes sobre archivos y procesos del sistema, es una de las pocas cosas que mantiene la interfaz de MAC OS X respecto a sus versiones anteriores.
Windows XP®
El sistema operativo Windows XP® fue lanzado por Microsoft® en el año 2001 y pertenece a la familia de sistemas operativos NT desarrollados con la intención de disponer de una alternativa de sistema operativo capaz de competir en calidad con los sistemas Unix, muy superiores a los primeros Windows en su arquitectura.
Ahora incluye además procesos automatizados, para actuar con “inteligencia” en
algunas áreas de la interfaz gráfica como ocurre en la barra de tareas, aglutinando bajo un mismo icono varias ventanas abiertas de la misma aplicación, ahorrando espacio, pero volviendo del mismo modo más complejo la interacción con la información.
Windows Vista®
Es una versión de Microsoft Windows®, línea de sistemas operativos desarrollada por Microsoft®. Esta versión se enfoca para ser utilizada en equipos de escritorio en hogares y oficinas, equipos portátiles, tablet PC y equipos media center.
El proceso de desarrollo terminó el 8 de noviembre de 2006 y en los siguientes tres meses fue entregado a los fabricantes de equipos y programas, clientes de negocios y canales de distribución. El 30 de enero de 2007 fue lanzado mundialmente y fue puesto a disposición para ser comprado y descargado desde el sitio web de Microsoft.
Windows Seven®
Windows 7® es la versión más reciente de Microsoft Windows®, línea de sistemas operativos producida por Microsoft Corporation. Esta versión está diseñada para uso en computadora, incluyendo equipos de escritorio en hogares y oficinas, equipos portátiles, tablet computadora, netbooks y equipos media center. El desarrollo de Windows 7 se completó el 22 de julio de 2009, siendo entonces confirmada su fecha de venta oficial para el 22 de octubre de 2009 junto a su equivalente para servidores Windows Server 2008 R2.3. Teniendo actualizaciones de software actualmente hasta el 2011.
GNU/Linux
El proyecto GNU, se inició en 1983 por Richard Stallman; tiene como objetivo el desarrollo de un sistema operativo Unix completo y compuesto enteramente de software libre. La historia del núcleo Linux está fuertemente vinculada a la del proyecto GNU. En 1991 Linus Torvalds empezó a trabajar en un reemplazo no comercial para MINIX9 que más adelante acabaría siendo Linux. Donde su última versión estable es el Kernel: 3.0.4 liberado en agosto del 2011.
Android Es un sistema operativo basado en el núcleo Linux diseñado originalmente para dispositivos móviles, tales como teléfonos inteligentes, pero que posteriormente se
Capítulo 1
reproductores MP3, netbook, computadora, televisores, lectores de e-book, liberado el 23 de septiembre de 2008, y su última versión 4.0 (Ice Cream Sandwich) en el 2011.
Además de los sistemas operativos también hay interfaces gráficas diseñadas a aplicaciones como lo es FANUC CNC® que desarrollan y producen sistemas de CNC para máquinas herramienta y otras aplicaciones. Hasta la fecha, se han vendido más de 2,2 millones de sistemas de control de CNC en todo el mundo, haciendo de FANUC CNC el número 1 mundial en sistemas de control de CNC. La familia de productos de CNC comprende tanto sistemas de control para máquinas de nivel básico, como para aplicaciones complejas [4]. Labview® es un entorno de programación gráfica usado por miles de ingenieros e investigadores para desarrollar sistemas sofisticados de medida, pruebas y control usando íconos gráficos e intuitivos y cables que parecen un diagrama de flujo. Ofrece una integración con miles de dispositivos de equipo y brinda cientos de bibliotecas integradas para análisis avanzado y visualización de datos, todo para crear instrumentación virtual. La plataforma Labview® es escalable a través de múltiples objetivos y sistemas operativos, desde su introducción en 1986 [5].
Las interfaces gráficas son un tema que también se desarrolla en el ámbito nacional, que permiten una interacción usuario máquina de forma fácil e intuitiva, razón por la cual es una herramienta llamativa para desarrollar una variedad basta de aplicaciones las cuales pueden ir desde el ámbito industrial, comercial hasta el escolar, permitiendo al usuario una manipulación y control tanto del programa como de las aplicaciones físicas incorporadas a las diversas aplicaciones que puede tener una interfaz gráfica de usuario.
Entre estas se tienen principalmente las de uso en la ingeniería teniendo mayor auge en las áreas electrónicas, mecánicas y robótica, aunque también se han encontrado aplicaciones que van desde modelos de simulación en arquitectura hasta de simulación en geometría analítica.
Capítulo 1
como electrónica, mecánica, análisis matemático, programación. Esta necesita de diversos elementos para su control, considerando lo anterior se han desarrollado interfaces gráficas que permitan la fácil manipulación de diversos elementos en robótica, tales como brazos robóticos.
De las cuales se han desarrollado investigaciones a nivel nacional como las presentadas a continuación:
Desarrollo de software aplicado a la geometría analítica a nivel medio superior, Presentada por el Ing. en computación José de Jesús Sánchez Herrera. De la Facultad de Ingeniería Electromecánica, de la de la Universidad de Colima. El trabajo muestra el desarrollo de un software de aplicación, para el apoyo de los programas educativos de Geometría Analítica a nivel medio superior, de las universidades de Guadalajara y de Colima [6].
Diseño de una interfaz gráfica que reproduzca algunos movimientos de una mano robótica presentada por Alberto Ibarra Domínguez Ing. en Comunicaciones y Electrónica por la Facultad de Ingeniería Mecánica, Eléctrica y Electrónica de la Universidad de Guanajuato, el desarrollo consistió en la creación de una aplicación con módulos que fueran capaces de lograr la representación de un prototipo físico robótico mediante los parámetros de Denavit-Hartenberg y a través de la actualización de éstos parámetros una animación fuera generada, la cual correspondiera a los valores reales obtenidos por la tarjeta de adquisición de datos [7].
Capítulo 1
Aunque también se han desarrollado interfaces para el ámbito educacional y social. Otra aplicación que se le ha dado a las interfaces gráficas es la que se presenta en el trabajo de investigación de Daniel Albarrán Alvarado de la Universidad Autónoma Metropolitana Azcapotzalco, quien diseñó una interfaz gráfica de usuario para la reducción de analfabetismo digital en población mexicana de 25 a 45 años. A través del diseño de interfaces gráficas de usuario en plataformas open source, a partir del análisis de objetos tecnológicos y digitales ya afianzados como lenguajes de interacción humano-computadora [9].
Dentro del Instituto Politécnico Nacional se tiene un amplio desarrollo sobre interfaces gráficas dirigidas a diferentes ámbitos, como los referidos a continuación:
Ambiente visual de simulación y análisis de redes de colas que presentó el Ing. Juan Manuel Horta Mendoza del Centro de Investigación en Computación del IPN, donde este trabajo presenta un ambiente visual de simulación y análisis de redes de colas llamado “QSim”, el cual permite al usuario modelar una red de manera rápida y fácil para después simular y obtener resultados de desempeño. La aplicación está basada en un simulador de eventos discretos programado en el lenguaje de programación Java. Además se incluye un generador de código listo para simularse, a partir de un archivo descriptor de una red de colas en XML y una interfaz de usuario amigable. La interfaz de usuario permite modelar de manera visual una red de colas y se incluye un módulo de graficación además de un módulo de análisis estadístico para dar más información de los resultados obtenidos [10].
Desarrollo de un sistema gráfico para análisis, diseño y monitoreo de tareas de tiempo real que presento Miguel Ángel Fajardo Ortiz del Centro de Investigación y de Estudios Avanzados del IPN, donde el objetivo principal de este trabajo de tesis es desarrollar una herramienta de simulación que permita verificar, validar, y monitorear un conjunto de tareas concurrentes de tiempo real, mediante una interfaz gráfica [11].
Capítulo 1
Capítulo 2
Capítulo 2
Fundamentos teóricos para el desarrollo de
la interfaz gráfica
Antes de programar la interfaz gráfica se necesita hacer un diseño y conocer algunos antecedentes teóricos específicos, los cuales serán vistos en este capítulo, en el cual se mostrará todo lo necesario para desarrollar la interfaz de control además de los componentes que integran la banda de transporte.
En el capítulo se trataran los temas y conceptos fundamentales para el desarrollo de la interfaz gráfica, los cuales parten desde la forma de planear el desarrollo de la programación y su correcta documentación.
Los comandos específicos en visual basic® para establecer la comunicación por la hyper-terminal de la computadora por medio del protocolo RS-232 con el “interface pic RBS001”
el cual es un microcontrolador PIC16F870 con un programa de direccionamiento de datos, como es que funciona el protocolo RS232, la forma de operación del “interface pic” y su
descripción breve al ser utilizado como controlador de los accionamientos y de recolección de los estados de los sensores de la banda transportadora.
El convertidor de tensión MAX232 para hacer posible la conexión física del puerto serial (DB9) de la computadora con los pines del “interfacepic” o en su defecto si no se cuenta
con un puerto serial, la forma de conectarlo por medio de una tarjeta convertidora de usb a serial, así como de especificar con que elementos dispone la banda transportadora y la ubicación de cada uno de éstos en ella.
2.1 Metodología para el diseño de una interfaz
En el proceso de diseño de una interfaz de usuario se pueden distinguir cuatro fases o pasos fundamentales [13]:
1. Reunir y analizar la información del usuario. 2. Diseñar la interfaz de usuario.
Capítulo 2
1) Reunir y analizar la información del usuario.
Es decir concretar a través de técnicas de recolección de información, qué tipo de usuarios van a utilizar el programa, qué tareas van a realizar los usuarios y cómo las van a realizar, qué exigen los usuarios del programa, en qué entorno se desenvuelven los usuarios (físico, social, cultural).
2) Diseñar la interfaz de usuario.
Es importante dedicar tiempo y recursos a esta fase, antes de entrar en la codificación. En esta fase se definen los objetivos de utilidad del programa, las tareas del usuario, los objetos y acciones de la interfaz, los iconos, vistas y representaciones visuales de los objetos, los menús de los objetos y ventanas. Todos los elementos visuales se pueden hacer primero a mano y luego refinar con las herramientas adecuadas.
3) Construir la interfaz de usuario.
Es interesante realizar un prototipo previo, una primera versión del programa que se realice rápidamente y permita visualizar el producto para poderlo probar antes de codificarlo definitivamente.
4) Validar la interfaz de usuario.
Se deben realizar pruebas de utilidad del producto, a ser posible con los propios usuarios finales del mismo.
Dentro de la metodología para el diseño de la interfaz también se tienen los estilos de programación los cuales se entiende por ser los métodos que existen para mejorar la calidad de los programas de computación [13].
1) El programa debe funcionar.
La característica más simple e importante de un programa es que funcione. 2) El programa no debe tener dificultades.
Capítulo 2
3) El programa debe estar bien documentado.
La documentación es necesaria para ayudar a comprender o a utilizar un programa. La documentación puede realizarse de dos formas: la documentación externa, que incluye
diagramas de flujo, descripciones de los algoritmos, etc., y la documentación interna, o
comentarios en el propio programa. La documentación externa está dirigida tanto a los usuarios del programa como al propio programador. A los usuarios del programa, para su correcta manipulación; y al programador, porque los detalles se olvidan y el programa generalmente sufre modificaciones a lo largo del tiempo. La documentación interna está dirigida principalmente al programador.
4) El programa debe ser eficiente.
Que un programa sea fácil de leer y de comprender son prerrequisitos importantes para su mantenimiento y modificación.
2.2 Programas especializados para el diseño de la interfaz
Para realizar la interface que trabaje entre el usuario y la banda de transporte se necesita de un lenguaje de programación, por lo tanto se buscó entre varias opciones, tales como:
JAVA®: se caracteriza por ser un lenguaje simple en programación orientada a objetos, para ambientes tales como Internet, además de tener una arquitectura neutral, esto es, que puede trabajar en cualquier otra plataforma, ya que genera un código independiente.
C: es un lenguaje pequeño, sencillo y no está especializado en ningún tipo de aplicación, es de fácil entendimiento para los usuarios.
MATLAB®: integra la programación y visualización en un ambiente muy
amigable para los usuarios donde los problemas y soluciones son expresadas en notación matemática.
VISUAL BASIC® (VB): Visual Basic 6.0® y sus herramientas ofrecen una
Capítulo 2
que los programas realizados con dichas herramientas no pierden el estilo que Windows brinda al usuario.
2.2.1 Visual basic 6.0®
Se selecciona Visual Basic® como la plataforma de trabajo que ayudará en la construcción de la interfaz gráfica, pues ofrece facilidad en el manejo de sus herramientas, un uso mínimo de líneas de código, una gran cantidad de dispositivos gráficos que formarán una buena presentación y una buena relación con el puerto serial, elementos los cuales son de gran importancia para la interfaz que se quiere realizar.
2.2.2 Características de visual basic®
Visual Basic® es un ambiente gráfico de desarrollo de aplicaciones para el sistema
operativo Microsoft Windows®. Las aplicaciones creadas con Visual Basic® están basadas en objetos y son manejadas por eventos. Visual Basic® se deriva del lenguaje Basic, el cual es un lenguaje de programación estructurado. Sin embargo, Visual Basic® emplea un modelo de programación manejada por eventos [13].
Barra de título: muestra el nombre del proyecto y del formulario que se está
diseñando actualmente.
Barra de menús: agrupa los menús despegables que contienen todas las
operaciones que pueden llevarse a cabo con Visual Basic 6.0®.
Barra de herramientas estándar: contienen los botones que se utilizan con mayor
frecuencia cuando se trabaja con un proyecto. Simplifica la elección de opciones de los menús Archivo, Edición, Ver y Ejecutar; además, en el área derecha presenta la ubicación (coordenadas) y el tamaño del objeto seleccionado.
Ventana de formulario: es el área donde se diseña la interfaz gráfica, es decir, es
donde se inserta gráficos, como botones, imágenes, casilla de verificación, cuadros de listas, etc.
Cuadro de herramientas: presenta todos los controles necesarios para diseñar una
Capítulo 2
Ventana de proyecto: muestra los elementos involucrados en el proyecto, como
formularios, módulos, controles, etc. Cada elemento puede seleccionarse en forma independiente para su edición.
Ventana de posición del formulario: muestra la ubicación que tendrá el
formulario en la pantalla, cuando ejecute la aplicación. Esta ubicación puede cambiarse si se hace clic con el botón izquierdo del mouse.
Ventana propiedades: muestra todas las propiedades del control actualmente
seleccionado, en este caso muestra las propiedades del Form1, luego podemos ver que abajo dice "Form1 Form", lo que está en negrita es el nombre del objeto, y lo que le sigue es el tipo de objeto, en este caso es un Formulario (Form).
2.2.3 Conceptos importantes en visual basic 6.0®
En Visual Basic 6.0® se tiene dos conceptos fundamentales en los que se basa; donde uno es el objeto y otro el evento.
Objeto
Un objeto es una entidad que tiene asociado un conjunto de métodos, eventos y propiedades. Hay muchas clases de objetos, y por tanto, puede llegar a haber tantos métodos, eventos y propiedades distintas como objetos diferentes.
Ejemplo: Una caja de texto (TextBox) en la cual se puede escribir cualquier línea, es un objeto.
Evento
Un evento es una atención que realiza un programa, rutina, objeto o llamada para que nuestro programa lo trate. Un programa Visual Basic® es un POE (programa orientado a eventos) y todo lo que se hace en él está generado por medio de eventos.
2.2.4 Plataforma de visual basic 6.0®
La primera vista de nuestra interfaz en Visual Basic®, es muy simple, en la Figura 2.1 se
Capítulo 2
Figura 2.1 Vista previa de la plataforma gráfica de visual basic®
2.2.5 Elementos de visual basic 6.0®.
En visual basic se tienen múltiples elementos que simplificaran la programación de la interfaz gráfica, entre los más representativos se tiene:
[image:26.612.136.473.79.333.2]Proyecto: Es un programa que está formado por formas y módulos (Figura 2.2).
Capítulo 2
Forma: Son plantillas en las que se puede poner botones, imágenes, letreros, capturar
información, etc. (controles), como se muestra en la Figura 2.3.
Figura 2.3 Vista de una forma de visual basic®.
Módulo: Es código, instrucciones que se asignan a un evento. No es necesario que un
[image:27.612.156.457.123.329.2]proyecto tengo módulos, pero sí que tenga formas (Figura 2.4).
Figura 2.4 Vista de la ventana módulo.
Control: Es un objeto que permite diseñar sin programar, una interfaz gráfica (mecanismo
de comunicación entre el usuario y la aplicación) para una aplicación. Para realizar una aplicación, se crean ventanas, llamadas formas (formularios), y sobre ellas se dibujan otros objetos como cajas de texto, botones de órdenes, listas desplegables, etc. Cada objeto ya sea ventana o control, está ligado a un código que permanece inactivo hasta que se dé el evento que lo activa. Se puede programar un botón de órdenes (objeto que se puede pulsar) para que responda a un clic del ratón. La Figura 2.5 muestra un botón de Control, ya que es un
Capítulo 2
Figura 2.5 Proyecto de visual basic® manejando un control.
Otros comandos importantes a utilizar en la interfaz gráfica son como los descritos en la
Figura 2.6, ya que tienen una interacción directa con el usuario final.
[image:28.612.143.459.309.685.2]Capítulo 2
2.2.6 Acceso al puerto serial a través de visual basic®
Para acceder al puerto serial y así enviar datos utilizando una aplicación creada en Visual Basic®, se hace uso del control MS COMM, el cual trae incorporadas todas las funciones para configurar el puerto. Es con este control que el manejo del puerto serial se facilita enormemente. Las propiedades más importantes de este control son las siguientes:
ComPort: Activa y regresa el número del puerto serial (Comm1, Comm2).
PortOpen: Activa y regresa el acceso al puerto.
Input: Regresa los caracteres del buffer receptor.
Output: Escribe una cadena sobre el buffer Transmisor.
Settings: Activa y regresa la razón de Baudios, paridad, número de bits, bits de paro.
Para poder tener acceso a cualquier propiedad del puerto serial se utiliza la siguiente sintaxis:
Nombre del Control. Propiedad = Valor
En este caso el objeto es MS Comm1, por lo tanto si quisiera abrir el puerto, la instrucción sería:
MS Comm1.PortOpen = True
Sin embargo, para poder utilizar el puerto serial, primeramente, se debe colocar el control MS Comm1 en la forma y hacer clic con el botón derecho del mouse, para que puedan aparecer sus propiedades, tal y como lo muestra la Figura 2.7.
Capítulo 2
Como la computadora sobre la cual se está trabajando solamente tiene un puerto serial y este es el comm1, en la propiedad CommPort debe tener el número 1, como los Micro controladores envían y reciben la información a una velocidad de 1200 bps, 8 bits, sin paridad y 1 BIT de paro, en la propiedad Settings se debe configurar con la siguiente cadena: 1200, n ,8, 1, y como no se va a realizar ningún control sobre el flujo de la información la propiedad handshaking debe ser igual a 0.
El objeto MS Comm1 responde al siguiente evento On Comm, el cual genera una interrupción, indicando cuando hay comunicación o si algún error ha ocurrido en la transferencia de la información.
Para poder enviar una cadena de caracteres a través del puerto serial, lo único que se tiene que hacer es utilizar la propiedad output del objeto MS Comm, por ejemplo:
MS Comm1.Output = “Esto es una prueba”
Como se observa en la Figura 2.7., una vez configurado el puerto serial, con esta
instrucción se envía a través del puerto la cadena de caracteres. “Esto es una prueba”
Pasos para poder enviar datos a través del Puerto Serial:
Insertar el control MS Comm sobre la forma: Establecer las siguientes propiedades :
ComPort:
Settings:
Handshaking:
Abrir el puerto, si este ya está abierto por otra aplicación, entonces se debe cerrar esa aplicación, para después volverlo a abrir el puerto con una aplicación en Visual Basic®, esto se hace utilizando la siguiente instrucción:
MSComm1.Portopen = true
Definir el tamaño del buffer receptor, esto se hace con la propiedad InputLen
Capítulo 2
Enviar los datos que se desean.
Cuando la aplicación se termine se debe cerrar el puerto.
2.3 Tipos de transmisión de datos
Para que la interfaz gráfica se comunique con el “interface pic” se tendrá que emplear la comunicación serial que es un tipo de transmisión de datos, que con la computadora será por medio del puerto serial. El puerto serial de las computadoras es conocido como puerto RS-232, la ventaja de este puerto es que gran parte de las computadoras traen al menos un puerto serial, este permite la comunicación entre otros dispositivos tales como otra computadora, el mouse, impresora y para nuestro caso con los microcontroladores, aunque hay algunas computadoras en las que ya no se utiliza y ha sido sustituido por puertos usb, en esa situación se utilizará un convertidor de usb a serial.
Para la transmisión de datos se pueden utilizar dos sistemas, como son la transmisión serie o la transmisión paralelo.
a) Transmisión serie
El tipo de transmisión serie se caracteriza por los siguientes aspectos:
Los datos son transmitidos bit a bit, utilizando una única línea de comunicación. Es la forma clásica de transmitir los datos a larga distancia.
Se utiliza cuando el volumen de información es relativamente pequeño.
b) Transmisión paralelo
La comunicación paralela transmite todos los bits de un dato de manera simultánea, por lo tanto la velocidad de transferencia es rápida, sin embargo tiene la desventaja de utilizar una gran cantidad de líneas, por lo tanto se vuelve más costoso y tiene las desventaja de atenuarse a grandes distancias, por la capacitancia entre conductores así como sus parámetros distribuidos.
2.3.1 Tipos de comunicaciones seriales
Capítulo 2
En la comunicación serial asíncrona, no son necesarios los pulsos de reloj. La duración de cada bit está determinada por la velocidad con la cual se realiza la transferencia de datos. La Figura 2.8 muestra la estructura de una carácter que se trasmite en forma serial
asíncrona.
Figura 2.8 Transmisión asíncrona
Normalmente cuando no se realiza ninguna transferencia de datos, la línea del transmisor se encuentra en estado alto. Para iniciar la transmisión de datos, el transmisor coloca esta línea en bajo durante determinado tiempo, lo cual se le conoce como bit de arranque (start bit) y a continuación empieza a transmitir con un intervalo de tiempo los bits correspondientes al dato, empezando siempre por el BIT menos significativo (LSB), y terminando con el BIT más significativo.
Si el receptor no está sincronizado con el transmisor, este desconoce cuándo se van a recibir los datos. Por lo tanto el transmisor y el receptor deberán tener los mismos parámetros de velocidad, paridad, número de bits del dato transmitido y de BIT de parada.
En los circuitos digitales, cuyas distancias son relativamente cortas, se pueden manejar transmisiones en niveles lógicos TTL (0-5V), pero cuando las distancias aumentan, estas señales tienden a distorsionarse debido al efecto capacitivo de los conductores y su resistencia eléctrica. El efecto se incrementa a medida que se incrementa la velocidad de la transmisión.
Capítulo 2
En la comunicación serial síncrona además de una línea sobre la cual se transmitirán los datos se necesita de una línea la cual contendrá los pulsos de reloj que indicaran cuando un datos es válido(Figura 2.9). Un ejemplo de este tipo de comunicación es la I2C.
Figura 2.9 Transmisión síncrona
2.3.2 Principio de funcionamiento de la comunicación serial.
El puerto serial es un dispositivo muy extendido y ya sean uno o dos puertos, con conector grande o pequeño, la mayoría de las computadoras lo incorporan actualmente. Debido a que el normalizado del puerto serial se mantiene desde hace muchos años, la institución de normalización americana (EIA) ha escrito la norma RS-232-C que regula el protocolo de la transmisión de datos, el cableado, las señales eléctricas y los conectores en los que debe basarse una conexión RS-232 [14].
La comunicación realizada con el puerto serial es una comunicación asíncrona. Para la sincronización de una comunicación se precisa siempre de un bit adicional a través del cual el emisor y el receptor intercambian la señal del pulso. Pero en la transmisión serial a través de un cable de dos líneas esto no es posible ya que ambas están ocupadas por los datos y la tierra. Por este motivo se intercalan antes y después de los datos de información de estado según el protocolo RS-232.
Capítulo 2
Bit de inicio.- cuando el receptor detecta el bit de inicio sabe que la transmisión a
comenzado y es a partir de entonces que debe leer la transmisión y entonces debe leer las señales de la línea a distancias concretas de tiempo, en función de la velocidad determinada.
Bit de parada.- indica la finalización de la transmisión de una palabra de datos. El
protocolo de transmisión de datos permite 1, 1.5 y 2 bits de parada.
Bit de paridad.- con este bit se pueden descubrir errores en la transmisión.
Se puede dar paridad par o impar. En la paridad par, por ejemplo, la palabra de datos a transmitir se completa con el bit de paridad de manera que el número de bits 1 enviados es par.
2.3.3 El protocolo RS-232
Consiste en un conector tipo DB-25 de 25 pines, aunque es normal encontrar la versión de 9 pines DB-9, más económico e incluso más extendido para cierto tipo de periféricos (como el ratón serie de la computadora). En cualquier caso, las computadoras no suelen emplear más de 9 pines en el conector DB-25. Las señales con las que trabaja este puerto serial son digitales, de +15V (0 lógico) y -15V (1 lógico), para la entrada y salida de datos, y a la inversa en las señales de control.
El estado de reposo en la entrada y salida de datos es -15V. Dependiendo de la velocidad de transmisión empleada, es posible tener cables de hasta 15 metros. Cada pin puede ser de entrada o de salida, teniendo una función específica cada uno de ellos. El número y función de cada pin se observa en las tablas 2.1 y 2.2.
Capítulo 2
Tabla 2.1 Función de los pines del conector DB9.
# Pin E/S Función Conector DB9
1 Tierra de Chasis
2 RXD E Recibir Datos
3 TXD S Transmitir Datos
4 DTR S Terminal de Datos Lista
5 SG Tierra de Señal
6 DSR E Equipo de Datos Listo
7 RTS S Solicitud de Envió
8 CTS E Libre para Envió
9 RI S Timbre
Telefónico
Tabla 2.2 Función de los pines del conector DB25.
# Pin E/S Función Conector DB9
1 Tierra de Chasis
2 TXD S Transmitir Datos
3 RXD E Recibir Datos
4 RTS S Solicitud de Envió
5 CTS E Libre para Envió
6 DSR E Equipo de Datos Listo
7 SG Tierra de Señal
8 CD/DCD E Detector de Portadora
15 TxC S Transmitir Reloj
17 RxC E Recibir reloj
20 DTR S Terminal de Datos Listo
22 RI S Timbre
Telefonico
Capítulo 2
2.3.3.1 Uso de las señales RS232
Cada uno de los pines del conector DB9 y DB25 tiene un número de pin específico tal como se muestra en las tablas 2.1 y 2.2 respectivamente, así como una función específica como se explica a continuación [14]:
Tierra de Chasis.- Se conecta internamente al chasis del dispositivo.
Recibe Datos (RXD).- Por esta pata entran los datos del dispositivo externo.
Transmite Datos (TXD).- Por esta pata salen los datos para ir al dispositivo
externo.
Terminal de Datos Listo (DTR).- Esta pata realiza el control maestro del
dispositivo externo. Cuando este pin esta en 1, el dispositivo externo no transmite ni recibe datos.
Tierra de señal.- Se ha dicho que los datos se envían como voltajes positivos (+) o
negativos (-). Pues bien, esta pata es la referencia de señal para esos voltajes.
Equipo de Datos Listo (DSR).- Por lo general, los dispositivos externos tienen esta
patita con un valor permanente de 0.
Solicita Permiso para Enviar Datos (RTS).- Esta parte del hardware se usa para
“estrecharse la mano” entre los dispositivos que se están comunicando. Si el
dispositivo externo está de acuerdo, pone un 0 en la patita que se llama Pista Libre para Enviar Datos (CTS).
Pista Libre para Enviar Datos (CTS).- Ésta es la otra mitad del hardware usado
para “estrecharse la mano”. El dispositivo externo pone esta pata en 0 cuando está
lista para recibir datos.
Timbre Telefónico (RI).- Esta patita se usa cuando un PLC está conectado a un
módem.
2.3.3.2 Velocidad y control del puerto serial.
Capítulo 2
Para controlar al puerto serial, el CPU emplea direcciones de puertos de E/S y líneas de interrupción (IRQ). Las IRQ no están especificadas. Cada usuario debe elegirlas de acuerdo a las que tenga libres o el uso que vaya a hacer de los puertos seriales (por ejemplo, no importa compartir una misma IRQ en dos puertos siempre que no se usen conjuntamente, ya que en caso contrario puede haber problemas).
Mediante los puertos de E/S se pueden intercambiar datos, mientras que las IRQ producen una interrupción para indicar al CPU que ha ocurrido un evento (por ejemplo, que ha llegado un dato, o que ha cambiado el estado de algunas señales de entrada). El CPU debe responder a estas interrupciones lo más rápido posible, para que dé tiempo a recoger el dato antes de que el siguiente lo sobrescriba.
El RS-232 puede transmitir los datos en grupos de 5, 6, 7 u 8 bits, a unas velocidades determinadas (normalmente, 9600 bits por segundo o más). Después de la transmisión de los datos, le sigue un bit opcional de paridad (indica si el número de bits transmitidos es par o impar, para detectar fallos), y después 1 o 2 bits de Stop. Normalmente, el protocolo utilizado es 8N1 (que significa, 8 bits de datos, sin paridad y con 1 bit de Stop).
Una vez que ha comenzado la transmisión de un dato, los bits tienen que llegar uno detrás de otro a una velocidad constante y en determinados instantes de tiempo, por eso se dice que el RS-232 es asíncrono. Los pines que portan los datos son RXD y TXD. Las demás se encargan de otros trabajos: DTR indica que la computadora está encendida, DSR que el aparato conectado a dicho puerto está encendido, RTS que la computadora puede recibir datos (porque no está ocupado), CTS que el aparato conectado puede recibir datos, y DCD detecta que existe una comunicación, presencia de datos.
Capítulo 2
2.4 Interface pic (RBS001)
Es un circuito práctico que integra una serie de módulos para llevar a cabo una interfaz entre una computadora personal y cualquier aplicación que se le desee dar al RBS001 con el mundo exterior (figura 2.10). La comunicación se basa en el estándar de comunicación
serial RS-232 con una velocidad de 9600 baudios, 8 bits de datos, 1 bit de inicio y parada, y sin paridad; usando sencillos comandos para su control. No se necesitan características especiales, puede usarse una terminal virtual con el RB001. Cuenta con 9 puertos de salida digitales (compatibles con niveles TTL), 5 convertidores análogo-digitales (ADC), 1 módulo PWM (Pulse Width Modulation- Modulación por ancho de pulso) y 4 entradas digitales.
Capítulo 2
El interface pic en si es un microcontrolador 16f870 que tiene cargado el programa RBS001, el cual únicamente puede ser adquirido dentro de un microcontrolador al cual ya no se puede accesar para modificar la estructura del programa, es un circuito integrado ya programado que contiene todos los componentes necesarios para controlar el funcionamiento de una tarea determinada.
Para esto, el microcontrolador utiliza muy pocos componentes asociados. Un sistema con microcontrolador debe disponer de una memoria donde se almacena el programa que gobierna el funcionamiento del mismo que, una vez programado y configurado, sólo sirve para realizar la tarea asignada. La utilización de un microcontrolador en un circuito reduce notablemente el tamaño y número componentes y, en consecuencia, disminuye el número de averías, el volumen y peso de los equipos, entre otras ventajas.
2.5 Convertidor de niveles MAX232
Capítulo 2
El MAX232 convierte los niveles RS-232 (de +15 a -15 V) a voltajes TTL (0 a 5V) y viceversa requiriendo una alimentación de 5 V. Se muestra la configuración interna del MAX232, en la Figura 2.11 el chip contiene dos controladores TTL a RS232 y dos RS232
a TTL, necesita de cuatro condensadores externos de 1 µF para generar la tensión RS-232 internamente [15].
2.6
Convertidor USB a serialLas computadoras actualmente cuentan con puerto serial, sin embargo los dispositivos para el envío y recepción de datos han evolucionado, como por ejemplo, al puerto USB que maneja protocolos diferentes, así como su dispositivo de entrada. Por lo tanto, la falta de un puerto serial en una computadora actualmente hace que se busquen nuevas alternativas para formar la comunicación, una de ellas es un convertidor USB a serial como se muestra en la
figura 2.12, el cual hace un buen manejo de los protocolos para crear la compatibilidad.
El convertidor transforma el dispositivo de conexión USB al conector serial macho DB9, proporcionando dos puertos seriales a la computadora, pero sólo funciona uno a la vez, este dispositivo es muy usado en las nuevas laptops que no tienen un puerto serial, pero se quiere conectar un control de juegos, un scanner, una cámara digital, etc.
Capítulo 2
2.7 Tarjeta de trasmisión y adquisición de datos
La tarjeta de emisión y recepción de datos es la que hará la comunicación entre el programa interfaz y la banda, este constará de 4 partes principales:
1) Circuito convertidor de recepción de datos.- Convertirá la tensión recibida de
15 y -15V de la computadora por parte de la interfaz gráfica a voltajes TTL de 0 a 5V, que pueda entender el PIC16F877A, circuito en el cual el integrado principal será el MAX232, pero en caso de no contar con puerto serial este circuito será sustituido por un convertidor usb a serial. (Figura 2.13).
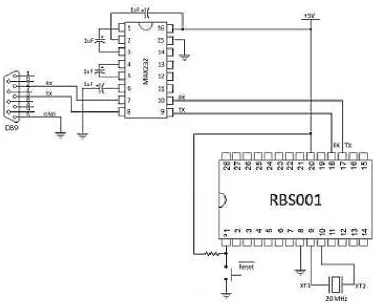
Figura 2.13 Configuración de comunicación RS232 por medio del MAX232.
2) Sistema de control por medio de la interfaz gráfica y el interface
pic.-Contará con el interface pic, el cual lo único que hará será ejecutar las órdenes de activación de la interfaz gráfica así como de enviar los estados de los sensores a la misma interfaz gráfica para ser evaluados (Figura 2.14).
Capítulo 2
Figura 2.14 Representación de la señal de datos de la computadora al interface pic.
3) Circuito de potencia.- Sera donde se tendra localizado la electrónica de potencia,
los transistores que activaran los accionamientos dependiendo la señales de control del PIC (Figura 2.15).
Capítulo 2
4) Circuito de sensores.- Aquí estarán conectados los sensores, los cuales por medio
de resistencias se configuraran para la detección apropiada de los elementos
(Figura 2.16), donde las señales de activación será cuando la señal de tensión que
manden sea de 0V.
Figura 2.16 Configuración básica para la detección de un sensor infrarrojo.
2.8 Hyper-terminal
La hyper-terminal es un programa que permite conectar dispositivos informáticos o computadoras. Sirve para enviar cualquier tipo de información o archivos pesados a través del puerto serie. Una de sus ventajas es que no necesita un equipo especial adicional para enviar información, solo necesita tener una conexión para modem, además funciona con mucha velocidad y envía la información en formato electrónico de forma directa.
Capítulo 2
2.9 Banda transportadora
A continuación se hace la descripción de la ubicación de los componentes (Tabla 2.3 y 2.4)
de la banda, la cual cuenta con 3 motores de corriente continua, 2 solenoides, 7 sensores infrarrojos y uno inductivo (figura 2.17 y 2.18), donde los sensores infrarrojos son
energizados a 5V mientras que los accionamientos y los sensores capacitivo e inductivo necesitan de 12V.
Tabla 2.3 Accionamientos montados en la banda transportadora.
Nomenclatura en
tarjeta Tipo Código Ubicación
Tensión y corriente
Motor 1 Cadena Moto reductor
CD
Rotalink D353012RG37-500
500:1 RATIO 12V DC I92
Final de la cadena de
transporte. 24V a 0.2A
Motor 2 Cinta Moto reductor
CD
Rotalink D353012RG37-500
500:1 RATIO 12V DC I92
Final de la cinta de
transporte. 24V a 0.2A
Solenoide 1 Solenoide Estándar de 12V Final de la cadena de
transporte. 24V a 1.3A
Solenoide 2 Solenoide Estándar de 12V Junto al infrarrojo 5. 24V a 1.3A
Solenoide 3 Solenoide Estándar de 12V Parte final de la cinta. 24V a 1.3A
Solenoide
rotacional Motor CD
Stock no. 343-313 35mm 45degs
12VDC
En la rampa 1 de descenso de la piezas
plásticas.
Capítulo 2
En la Tabla 2.3 y 2.17 se mostraron el tipo y ubicación de los accionamientos montados en
la banda transportadora. A continuación en la Tabla 2.4 y 2.18 se mostraran el tipo y
ubicación de cada uno de los sensores.
Tabla 2.4 Sensores montados en la banda transportadora.
Nomenclatura en
tarjeta Tipo Código Ubicación Tensión
Infrarrojo 1 sensor infrarrojo 2LOIF Sharp
Parte superior del solenoide 1 en la cadena de transporte.
12V
Infrarrojo 2 sensor infrarrojo QRD1114
A un lado del solenoide1 en la cadena de transporte.
5V
Infrarrojo 3 sensor infrarrojo QRD1114
En la parte de armado de la pieza, sensor justo antes del sensor
inductivo.
5V
Infrarrojo 4 sensor infrarrojo QRD1114 A un lado del sensor infrarrojo 5.
5V
Infrarrojo 5 sensor infrarrojo QRD1114 A un lado del sensor infrarrojo 5.
5V
Infrarrojo 6 sensor infrarrojo QRD1114 Junto al solenoide 2. 5V
Infrarrojo 7 sensor infrarrojo QRD1114 Arriba del motor de la cinta de transporte.
5V
Ind. sensor Sensor Inductivo
DJ5GE En la cinta de transporte antes del
sensor de barrera.
Sensor Ind
Sensor if-2
Sensor if-3
Sensor if-5
Sensor if-6
Sensor if-7
Sensor if-1
[image:47.792.55.747.71.527.2]Capítulo 3
Capítulo 3
Diseño de la interfaz gráfica para el control de la
banda transportadora.
En este capítulo se abordaran los cálculos, diagramas de flujo, diseño electrónico y de programación necesarios para la interfaz gráfica de control de la banda transportadora, empezando con la clasificación de los componentes que integran la misma.
La forma de operar el proyecto será por medio del programa de la interfaz gráfica, la cual recibirá las señales de los sensores y en base a ellos tomara las decisiones de control,
basándose en un control de “todo o nada” ya que la salida de los solenoides no es
proporcional.
La banda podrá ser activada solo con la interfaz gráfica, donde por medio del interface pic podrá adquirir las señales de los sensores y mandar la activación de los accionamientos correspondientes. El interface pic funciona como un direccionador de datos comunicando las órdenes de la interfaz y enviando los datos de entrada a la interfaz. Solo así en este modo de operación se tendrá una mayor variedad de opciones, ya que se podrá ver como se conforma cada una de las estaciones de trabajo en la banda (las cuales se explican en el tema 3.1), cambiar el modo de operación de la banda de las tres disponibles:
Modo automático: en el cual seguirá la secuencia específica de la banda.
Modo semiautomático: en el que se podrá activar o desactivar cada una de las
estaciones de trabajo a voluntad, con sus respectivos sensores y accionamientos.
Modo manual: en el que el usuario podrá activar o desactivar cada uno de los
accionamientos de forma manual, eliminado la dependencia de la activación por medio de los sensores y sirviendo como un modo de prueba para detectar fallas de algún componente al poder evaluar su respuesta de forma unitaria.
Capítulo 3
3.1 Revisión y agrupación de los elementos individuales de la banda
de transporte
[image:49.612.359.493.202.362.2]La banda de transporte consta de múltiples accionamientos y sensores, los cuales ahora se clasificaran en estaciones de trabajo, teniendo que la banda será suministrada con dos tipos de piezas; ruedas plásticas Figura 3.1 y piezas metálicas de ensamble Figura 3.2.
Figura 3.1 Rueda plástica. Figura 3.2 Pieza metálica de ensamble.
Considerando a la banda transportadora como un proceso completo de ensamble para lograr una pieza unida (Figura 3.3), se tendrá que cada estación de trabajo tendrá su propio
diagrama de flujo dentro de la interfaz gráfica, con sus respectivos accionamientos y sensores para realizar la acción correspondiente a la estación. Por tanto las estaciones se clasificaran en 5.
[image:49.612.110.264.223.358.2] [image:49.612.237.375.526.674.2]Capítulo 3
Estación 1.-Selección
Esta etapa inicia con la alimentación de material, sean piezas plásticas o metálicas, que llegan hasta la primera estación por el motor que mueve la cadena (Figura 3.4).
La primera estación (Figura 3.4) está conformada por los sensores infrarrojos 1 y 2, y del
solenoide 1. Estación que por medio de los sensores determinará si es una rueda de plástico o una pieza de metal la que llega al proceso. Esto lo logrará debido a las distintas alturas de las piezas que será detectada por el sensor infrarrojo 1, mientras que el sensor infrarrojo 2 solo detectará si hay o no una pieza cerca, y por medio del solenoide mandará las piezas plásticas a la estación de armado, a la vez de también llevar un registro de las piezas.
Figura 3.4 Estación 1-selección.
Después de esta estación hay dos rampas, donde la primera rampa conduce a la “Estación
2.-Armado” por la cual son enviadas las piezas plásticas, mientras que la segunda rampa
por donde son enviadas las piezas metálicas desciende a la cinta transportadora que a la vez pasa por debajo de la “Estación 2.-Armado” y conduce a la “Estación 3.- Clasificación”.
Capítulo 3
Tabla 3.1 Tabla de verdad de la estación 1.
Sensor infrarrojo 1 Sensor infrarrojo 2 Solenoide 1 Resultado
Desactivado Desactivado Desactivado No hay nada
Desactivado Activado Activado Pieza plástica
Activado Desactivado Desactivado No aplica
Activado Activado Desactivado Pieza metálica
Estación 2.-Armado
Esta estación es continuación de la estación de selección Figura 3.5. La segunda estación
está conformada por el sensor infrarrojo 3 y el solenoide rotacional. El cual por medio del sensor detecta si esta la pieza de plástico lista para el ensamble en caso de que no, el solenoide rotacional se activa dejando pasar otra pieza plástica, si es que hay una esperando.
Figura 3.5 Estación 2-Armado.
Capítulo 3
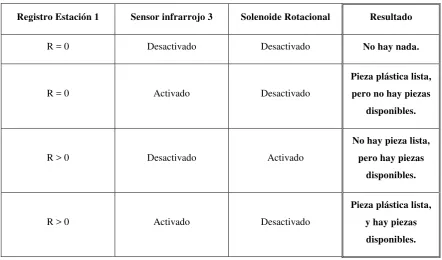
Tabla 3.2 Tabla de verdad de la estación 2.
Registro Estación 1 Sensor infrarrojo 3 Solenoide Rotacional Resultado
R = 0 Desactivado Desactivado No hay nada.
R = 0 Activado Desactivado
Pieza plástica lista, pero no hay piezas
disponibles.
R > 0 Desactivado Activado
No hay pieza lista, pero hay piezas
disponibles.
R > 0 Activado Desactivado
Pieza plástica lista, y hay piezas disponibles.
Estación 3.-Clasificación
Esta estación es la continuación después de la unión de las piezas metálicas con las de plástico. En caso de que la unión no hubiera sido satisfactoria esta sección lo clasificará ya que aunque no cuenta con un solo accionamiento, si cuenta con múltiples sensores, el sensor inductivo, el infrarrojo 4 y el infrarrojo 5 (Figura 3.6) con los cuales él será capaz de
determinar si lo que pasó por ella fue un ensamble o una pieza unitaria.