Fundamentación de un modelo para una Red wi fi en una Aplicación Específica del Grupo de Investigación Roma
78
0
0
Texto completo
(2) FUNDAMENTACIÓN DE UN MODELO PARA UNA RED WI-FI EN UNA APLICACIÓN ESPECÍFICA DEL GRUPO DE INVESTIGACIÓN ROMA. Proponentes: CIELO ESPERANZA DÁVILA NEIDA JOHANA CHÁVEZ GONZÁLEZ Código: 20142373037 20142373051. Director del proyecto: ING. GUSTAVO ADOLFO HIGUERA CASTRO. UNIVERSIDAD DISTRITAL “FRANCISCO JOSÉ DE CALDAS” TESIS PARA OPTAR POR EL TÍTULO DE INGENIERO EN TELECOMUNICACIONES FACULTAD TECNOLÓGICA 2017. 2.
(3) AGRADECIMIENTOS. “A mi familia, gracias por el apoyo, la colaboración, la paciencia y el cariño en la culminación de este proyecto, logro que jamás hubiese sido posible sin ustedes y es en definitiva para ustedes que busco mejorar cada día” Cielo Esperanza Dávila. “A mi familia, especialmente a mi madre y a mi hija gracias por su comprensión y apoyo que hicieron posible este sueño de ser ingeniera, a nuestro tutor el Ingeniero Gustavo Adolfo Higuera Castro por su colaboración durante el desarrollo del proyecto y a todos aquellos que hicieron parte de este proceso educativo” Neida Johana Chávez González. 3.
(4) CONTENIDO 1. INTRODUCCIÓN ............................................................................................................... 8 2. PLANTEAMIENTO DEL PROBLEMA ............................................................................ 9 3. OBJETIVOS...................................................................................................................... 10 3.1. General ...................................................................................................................... 10 3.2. Específicos ................................................................................................................ 10 4.. MARCO TEÓRICO .................................................................................................. 11 4.1. Conceptos Generales Fundamentar ..................................................................... 11 4.2. Modelo ..................................................................................................... 11 4.2.2. Ventajas ................................................................................................ 12 4.2.3. Desventajas .......................................................................................... 12 4.2.3. Etapas ................................................................................................... 12 4.3. WiFi .......................................................................................................... 13 4.3.1 Versiones 802.11 .................................................................................... 13 4.3.2 Tipos de dispositivos WIFI ...................................................................... 15 4.3.3 Arquitectura. ........................................................................................... 15 4.3.4 Limitaciones tecnológicas 802.11 ........................................................... 16 4.3.5 Estándares Wi-Fi .................................................................................... 16 4.3.5.1 Aspectos tecnológicos de 802.11b ....................................................... 17 4.3.5.2 Aspectos tecnológicos de 802.11a ....................................................... 17 4.3.5.3 Aspectos tecnológicos de 802.11g ....................................................... 17 4.3.5.4 Aspectos tecnológicos de 802.11n ....................................................... 17 4.3.6 WEP ....................................................................................................... 18 4.3.7 WPA (Wi-Fi Protected Access, también conocido como TKIP) ............... 18 4.4. Topologías ................................................................................................ 19 4.4.1 Red ad hoc ............................................................................................. 19 4.4.2 MESH: .................................................................................................... 19. 5.. ESTUDIO DE ORDEN TÉCNICO: ........................................................................ 21. 5.1 Establecer las topologías de red adecuadas para las plataformas LEGO, con ayuda de la tecnología WI-FI. .................................................................................... 21. 4.
(5) 5.2 Implementar una red de comunicación robótica cooperativa, soportada en aplicaciones anteriormente realizadas en el grupo de investigación. .......................... 28 5.3 Especificar las diferentes características de comportamiento de la tecnología WIFI, para futuras aplicaciones en el grupo. ................................................................... 34 6.. TECNOLOGÍAS DE LA INFORMACIÓN.............................................................. 38. 6.1. Comportamiento de la tecnología WiFi ................................................................. 40. 7.. PROCEDIMIENTO ................................................................................................... 43. 8.. RESULTADOS OBTENIDOS ................................................................................. 56. 8.1. Construcción del escenario: ................................................................................... 59. 9.. CONCLUSIONES..................................................................................................... 75. 10.. REFERENCIAS BIBLIOGRÁFICAS ...................................................................... 76. 5.
(6) LISTA DE TABLA. Tabla 1. Versiones [14] ....................................................................................................... 14 Tabla 2 Topologías ventajas y desventajas .................................................................... 28 Tabla 3 Tecnologías de la información ............................................................................. 40 Tabla 4 Tecnologías para implementar ............................................................................ 42 Tabla 5 Topologías Implementadas ................................................................................. 57 Tabla 6 Condiciones de Interfaz ........................................................................................ 61 Tabla 7 Combinación de condiciones ............................................................................... 61 Tabla 8 Datos obtenidos topología anillo ......................................................................... 65 Tabla 9 Datos obtenidos topología árbol .......................................................................... 66 Tabla 10 Análisis de tiempo vs distancia.......................................................................... 66 Tabla 11 Distancia a 1 metro ............................................................................................. 67 Tabla 12 Distancia a 2 metros ........................................................................................... 68 Tabla 13 Distancia a 3 metros ........................................................................................... 69 Tabla 14 Distancia a 4 metros ........................................................................................... 70 Tabla 15 Promedio de datos a 1 metro ........................................................................... 71 Tabla 16 Promedio de datos a 2 metros ........................................................................ 71 Tabla 17 Promedio de datos a 3 metros ......................................................................... 72 Tabla 18 Promedio de datos a 4 metros ......................................................................... 72 Tabla 19 Promedio Total ..................................................................................................... 72. 6.
(7) LISTA DE ILUSTRACIONES. Ilustración 1 Desarrollo por el método de prototipos [8]. ............................................... 11 Ilustración 2 Etapas de un modelo [12] ............................................................................ 13 Ilustración 3 Topología punto a punto [20] ....................................................................... 22 Ilustración 4 Topología bus [20] ......................................................................................... 22 Ilustración 5 Topología estrella [20] .................................................................................. 23 Ilustración 6 Topología anillo [20] ...................................................................................... 23 Ilustración 7 Topología en malla [20] ................................................................................ 24 Ilustración 8 Topología árbol [20] ...................................................................................... 24 Ilustración 9 Topología cadena margarita [20] ................................................................ 25 Ilustración 10 Red Anillo [20] .............................................................................................. 34 Ilustración 11. Metodología................................................................................................. 44 Ilustración 12 Diagrama Movimiento del lego .................................................................. 46 Ilustración 13. Programación LEGO.................................................................................. 47 Ilustración 14 Modulo ESP8266 [39]. ................................................................................ 49 Ilustración 15 Código para el módulo ESP8266 de la interfaz..................................... 50 Ilustración 16 Código para el Arduino de la interfaz ....................................................... 51 Ilustración 17 Código Arduino lego 1 ................................................................................ 52 Ilustración 18 Código módulo ESP8266 lego 1 ............................................................... 53 Ilustración 19 Código Arduino lego 2 ................................................................................ 54 Ilustración 20 Código módulo ESP8266 lego 2 ............................................................... 55 Ilustración 21 Robot Lego 1 ................................................................................................ 57 Ilustración 22 Robot Lego 2 ................................................................................................ 58 Ilustración 23 Construcción del escenario........................................................................ 59 Ilustración 24 Interfaz .......................................................................................................... 60 Ilustración 25 Redes Implementadas ................................................................................ 62 Ilustración 26 Distancias de pruebas ................................................................................ 63 Ilustración 27 Ping módulo de la interfaz.......................................................................... 64 Ilustración 28 Ping módulo de lego 1 ................................................................................ 64 Ilustración 29 Ping módulo lego 2 ..................................................................................... 65 Ilustración 30 Distancia Vs Tiempo ................................................................................... 67 Ilustración 31 Distancia a 1 metro ..................................................................................... 68 Ilustración 32 Distancia a 2 metros ................................................................................... 69 Ilustración 33 Distancia a 3 metros ................................................................................... 69 Ilustración 34 Distancia a 4 metros ................................................................................... 70 Ilustración 35 Promedio Total de Perdidas ...................................................................... 73. 7.
(8) 1. INTRODUCCIÓN Las comunicaciones en la actualidad abarcan un gran ámbito de tecnologías, proveedores y dispositivos que permiten una mayor eficiencia y caracterización en el comportamiento de estas, en esta oportunidad se desarrollara un modelo de comunicación soportado con la tecnología Wi-Fi, que genere una comunicación estable entre los robots Lego Mindstorm NXT, en una implementación específica previamente desarrollada en el Grupo de Investigación en Robótica Móvil Autónoma (ROMA), que simule un comportamiento cooperativo en la cual se puede evidenciar el trabajo en equipo de una manera coordinada, por medio de varios robots. Además, generan una comparación de topologías de red con Wi-Fi que conlleve a estudios posteriores y aplicaciones futuras con base a este, soportando que cualquier tipo de comunicación sobre los legos y no solo limitándose a los componentes propios de cada kit.. 8.
(9) 2. PLANTEAMIENTO DEL PROBLEMA. En el grupo de investigación ROMA desde hace ya varios años se ha realizado una serie de proyectos que permiten un enfoque bastante didáctico y productivo para aplicaciones como robótica cooperativa, precisamente por esa razón el avance en esa rama ha sido bastante, pero uno de los primordiales inconvenientes ha sido la comunicación de los sensores utilizados con los diferentes controles, además de la comunicación entre los mismos legos para generar un mejor comportamiento cooperativo. Por esta razón se propone el desarrollo y fundamentación de un modelo de red basado en tecnología Wi-Fi que permita el avance de la línea de investigación en sensores remotos, además de obtener una serie de módulos que faciliten y mejoren todas las aplicaciones ya hechas en el grupo. Para delimitar un poco y no abarcar una serie de factores que impidan una buena ejecución se pretende el uso de únicamente los robots realizados en la plataforma Lego Mindstorm NXT, y una aplicación específica realizada con anterioridad en ROMA.. 9.
(10) 3. OBJETIVOS. 3.1. General Fundamentar un modelo para una red WI-FI en una aplicación específica soportada en el kit LEGO MINDSTORN NXT dentro del grupo de investigación ROMA, que permita establecer la mejor topología y desempeño de la misma.. 3.2. Específicos 1. Establecer las topologías de red adecuadas para las plataformas LEGO, con la ayuda de la tecnología WI-FI. 2. Implementar una red de comunicación robótica cooperativa, soportada en aplicaciones anteriormente realizadas en el grupo de investigación. 3. Especificar las diferentes características de comportamiento de la tecnología WIFI, para futuras aplicaciones en el grupo.. 10.
(11) 4. MARCO TEÓRICO 4.1. Conceptos Generales Fundamentar El termino fundamentar como se indicó en el título del proyecto, es tener una base para construir algo sobre ella [1], establecer los fundamentos de cierta cosa [2]. Establecer, asegurar y hacer firme una cosa [3]. 4.2. Modelo Un modelo es un esquema teórico de un sistema o realidad compleja que se elabora para facilitar su compresión y estudio. Cada una de las modalidades, tipos o categorías que existen de algo [4]. Modelo es una representación o prototipo del sistema a desarrollar que, a diferencia de un modelo de simulación, incorpora componentes del producto real [5]. Existen muchas clases de modelos como los modelos en forma de cascada o ciclo de vida clásico, de análisis estructurado, método de prototipos y el modelo en espiral [6]. Para la elaboración del proyecto se tendrá en cuenta el modelo del método de prototipos (ilustración 1) el cual se debe desarrollar en corto tiempo y con bajo presupuesto [7]. El método de desarrollo de prototipos suele elegirse cuando se presentan alguna o varias situaciones, un prototipo es, entonces, una aplicación ya desarrollada que funciona y que sirve para probar ideas y suposiciones relacionadas con el sistema que se quiere implementar [8].. Ilustración 1 Desarrollo por el método de prototipos [8]. 11.
(12) Una ventaja de este modelo es que se obtiene una rápida realimentación del usuario, ya que las actividades de especificación, desarrollo y pruebas se ejecutan en cada iteración. 4.2.1. Razones para usar este modelo Las razones para usar un prototipo es cuando el modelo de fases análisis diseño - instrumentación es inapropiado, es decir cuando el sistema se puede realizar solamente con esta metodología [9].. 4.2.2. Ventajas La construcción de prototipos se puede utilizar como un modelo del proceso independiente, se emplea más comúnmente como una técnica susceptible de implementarse dentro del contexto de cualquiera de los modelos del proceso expuestos [10]. 4.2.3. Desventajas Puede existir una mala interpretación que pueden hacer los usuarios del prototipo, al cual pueden confundir con el sistema terminado [11]. 4.2.3. Etapas En la ilustración 2 se observa las etapas de cómo realizar un modelo: . Recolección y refinamiento de requisitos. Modelado o diseño rápido. Construcción del Prototipo Evaluación del prototipo por el cliente Refinamiento del prototipo Entrega del desarrollo final o producto de ingeniería [12]. 12.
(13) Ilustración 2 Etapas de un modelo [12] 4.3. WiFi WiFi es una tecnología inalámbrica utilizada para conectar e intercambiar información entre dispositivos electrónicos sin necesidad de conectarlos mediante el uso de cables físicos, se usa el término Wi-Fi (WirelessFidelity o fidelidad sin cables) para designar a todas las soluciones informáticas que utilizan tecnología inalámbrica 802.11. Es el estándar más utilizado para conectar ordenadores a distancia. Estrictamente la palabra Wi-Fi hace referencia a todos los dispositivos electrónicos diseñados para establecer una comunicación inalámbrica y que han sido certificados por la organización WiFi Alliance [13] 4.3.1 Versiones 802.11. Poseen características diferentes como la frecuencia que usan, el ancho de banda, la velocidad y el alcance. Una característica importante que tenía el estándar 802.11G es que todos los dispositivos que cumplían dicho estándar respondían a las mismas características técnicas. Todos utilizaban la misma banda de frecuencias, el mismo ancho de banda por canal, el mismo tipo de modulación, la misma banda de guarda; sin embargo, con la publicación del nuevo estándar 802.11N las cosas iban a cambiar en cuanto a simplicidad. Este nuevo estándar añade algunas características respecto a su antecesor 802.11G que pueden mejorar sustancialmente el rendimiento de las redes inalámbricas. Hasta la versión anterior, la 802.11G, todos los dispositivos Wi13.
(14) Fi tenían las mismas características, con lo cual el rendimiento era más o menos parecido en condiciones óptimas, con un tope máximo teórico para todos los dispositivos de 54 Mbps [14] El estándar 802.11N define sin embargo varias configuraciones de funcionamiento, cada una de las cuales ofrecen prestaciones diferentes. Por lo que se creó el esquema de modulación y codificación MCS (Modulation and CodingScheme). El esquema de modulación y codificación define el valor de algunos parámetros de la transmisión que influyen directamente en la velocidad máxima alcanzada, esta norma IEEE 802.11N define hasta 77 MCS, es decir, 77 modos de operación diferentes y cada uno de ellos ofrece hasta cuatro velocidades máximas teóricas, dependiendo del ancho del canal utilizado y del intervalo de guarda [15]. En la tabla 1 se observan las características principales de las versiones del estándar 802.11.. Estándar. Velocidad (teórica). Velocidad (práctica). 802.11. 2 Mbps. 1 Mbps. 802.11a. 54 Mbps. 22 Mbps. 5,4 Ghz. 1999. 802.11b. 11 Mbps. 6 Mbps. 2,4 Ghz. 1999. 802.11g. 54 Mbps. 22 Mbps. 2,4 Ghz 20 MHz 2003. 802.11n. 600 Mbps. 100 Mbps 2,4 Ghz 40 MHz 2009 y 5,4 Ghz. Banda. Año. 1997. 802.11ac 6.93 Gbps 100 Mbps 5,4 Ghz. Tabla 1. Versiones [14]. 14. Ancho de banda. 80 o hasta 160 MHz. 2012.
(15) 4.3.2 Tipos de dispositivos WIFI 4.3.2.1 MCS WiFi: Utiliza una técnica llamada SDM (Spatial División Multiplexing, Multiplexación por división espacial) para las transmisiones inalámbricas que permite conseguir varios flujos de información sobre el mismo rango de frecuencias. El estándar Wi-Fi N admite entre 1 y 4 flujos simultáneos [16] Por tanto, el MCS máximo utilizado en una comunicación WiFi N, en condiciones de distancia, obstáculos, interferencias óptimas, viene marcado por el dispositivo con el MCS más bajo [17]. 4.3.2.2 Velocidad de Modulación: Se suele especificar con dos cifras. La primera indica el número de bits de información por símbolo (unidad mínima de señal modulada que contiene información) y el segundo indica el número total de bits enviados en un símbolo. Estos bits extra del segundo parámetro son bits de redundancia para la detección de errores [18]. 4.3.2.3 Tipo de Modulación: La modulación es el proceso por el cual se genera una señal que se adapta al medio de transmisión. En el caso de Wi-Fi la señal modulada es una señal analógica que contiene información digital. El parámetro que define el rendimiento de un tipo de modulación concreto es el número de bits por símbolo. La modulación más básica es la BPSK y la más avanzada es la 64QAM. Las modulaciones más avanzadas permiten transmitir más bits por unidad de tiempo pero son más sensibles a interferencias y desvanecimientos de la señal [19]. 4.3.3 Arquitectura. Los elementos que forman una red WIFI son los siguientes: Punto de Acceso (AP): Es el dispositivo que gestiona la información transmitida y la hace llegar al destino además proporciona la unión entre la red WIFI y la red fija. . Antena: Elementos que envían al aire señales en forma de ondas electromagnéticas que contienen la información dirigida en el dispositivo de destino; y a la vez captan del aire las señales de las cuales se extraerá la información que llega de otro dispositivo [20].. 15.
(16) . Dispositivo Externo WIFI: La tarjeta WIFI, es una tarjeta de red de área local (CHAL), permite la conexión de un terminal de usuario en una red 802.11, hay diferentes tarjetas para cada sub estándar o también hay mixtas [21].. 4.3.4 Limitaciones tecnológicas 802.11 Independientemente de la banda de frecuencia en que trabajan, todos los estándares de la subfamilia 802.11 comparten algunas limitaciones. Alcance: Aunque comercialmente se habla típicamente de un alcance de hasta 100 metros, depende, de la ubicación y de la presencia de obstáculos en el camino entre el punto de acceso y el terminal, y de las condiciones meteorológicas e interferencias [22]. Anchura de banda: Debido al efecto de los protocolos necesarios para transportar la información de usuario sobre el canal aéreo, la velocidad útil es mucho menor. Es por eso que a veces se cuenta con una conexión con el punto de acceso de 11 Mbps, otros en 5 Mbps, en 2 Mbps o, incluso, en 1 Mbps [23]. Calidad de servicio: La consecuencia es que Wi-Fi es poco adecuado para transportar tráfico exigente en términos de calidad, como VoIP, no tanto para que no funcione adecuadamente, sino porque no se puede garantizar cuándo y en qué condiciones funcionará [24]. Seguridad: En un principio, las redes Wi-Fi no presentaban mecanismos de seguridad muy sofisticados. De hecho, la falta de seguridad de estas redes, es uno de los principales retos para mejorar a futuro [25]. Movilidad: Popularmente, se considera que las redes Wi-Fi son móviles, ya que no hay que conectarse a una ubicación fija para acceder a los servicios que ofrecen; estrictamente hablando, eso se considera itinerancia, y no movilidad. También en este aspecto el estándar presenta deficiencias que pueden hacer que se pierda brevemente la conexión e incluso se requiera volver a conectarse manualmente [26]. 4.3.5 Estándares Wi-Fi Los estándares del IEEE no se configuran nunca de manera cerrada, es decir que se van mejorando a medida que avanzan las investigaciones en el campo, por eso a lo largo del tiempo van apareciendo nuevos sub estándares que implementan mejoras o variantes sobre algún aspecto. La nomenclatura que. 16.
(17) se sigue en estos casos consiste en ir añadiendo letras minúsculas detrás del número 802.11, que es el del estándar principal [27].. 4.3.5.1 Aspectos tecnológicos de 802.11b Este estándar define la creación de redes sin hilos a la frecuencia de 2.4 GHz, con una topología de modulación que permite alcanzar velocidades de transmisión "en el aire" de hasta en 11 Mbps, cosa que supone una velocidad efectiva para los usuarios de aproximadamente 5.5 Mbps. Hasta hace poco era la tecnología más extendida, pero ahora ha sido sustituida por 802.11g, que ofrece las mismas ventajas (banda de uso libre, simplicidad de funcionamiento), pero con más anchura de lado y además es compatible con b, lo cual permite mezclar dispositivos de ambos tipos en la misma red [28]. 4.3.5.2 Aspectos tecnológicos de 802.11a Este estándar define la creación de redes sin hilos a la frecuencia de 5 GHz. La información de un usuario se transmite modulando digitalmente una señal de la banda de 5 GHz con los datos del usuario. La modulación que se utiliza en este estándar se difiere de la 802.11b y es especialmente útil en entornos donde pueden aparecer grandes interferencias, por ejemplo, en transmisiones móviles en trenes. En cambio, es incompatible con 802.11b, ya que trabaja en otra frecuencia. El estándar 802.11a permite alcanzar velocidades de transmisión máximas de hasta 54 Mbps, cosa que supone una velocidad efectiva de aproximadamente 36 Mbps [29]. 4.3.5.3 Aspectos tecnológicos de 802.11g Este estándar mejora el 802.11b, ya que trabaja igualmente a la frecuencia de 2.4 GHz, pero varía la modulación hasta alcanzar igualmente velocidades de transmisión máximas de hasta 54 Mbps con una velocidad efectiva de aproximadamente 36 Mbps, tiene capacidad de trabajar conjuntamente con el equipamiento 802.11b, permitiendo mantener el equipamiento anterior y migrar lentamente al nuevo estándar [30].. 4.3.5.4 Aspectos tecnológicos de 802.11n La gran innovación del 802.11n es el uso de una antena en cada punto de acceso y en cada terminal, de manera que se puedan aprovechar los "rebotes" y combinarlos para obtener una mejor señal. Al mismo tiempo, se puede enviar más de una señal a la vez (diversas antenas). Combinando ambos efectos, se 17.
(18) consigue una transmisión más eficaz y más robusta, y en definitiva, más anchura de lado para el usuario. Esta técnica se llama MIMO (Múltiple-input, Múltiple-output). La manera de conseguir las anchuras de lado es juntando dos canales "normales" para una única comunicación. Evidentemente, si bien la velocidad es el doble, la capacidad total de la celda se reduce a la mitad [31].. 4.3.6 WEP Es un sistema de cifrado estándar propuesto por el comité 802.11, que comprime y cifra los datos que se transmiten a través de las ondas de radio. La clave está fija y es la misma para todos los usuarios de una red. WEP es soportado por la mayoría de fabricantes de productos Wi-Fi, sus principales características son: Autenticación Abierta: Mecanismo que permite que cualquier dispositivo pueda obtener acceso a la red y los datos se transmiten sin ningún tipo de cifrado [32]. Autenticación de clave compartida: Es un mecanismo de autenticación que utiliza la clave WEP de la red para autenticar al cliente (el cliente cifra con la clave de red y lo devuelve al punto de acceso si este proceso se resuelve satisfactoriamente, se inicia el mismo proceso en sentido inverso). Este sistema es vulnerable, ya que es sencillo obtener la clave de cifrado y el algoritmo no se considera seguro [16]. Autenticación por dirección MAC: Es un mecanismo de autenticación basado en listas de control de acceso que contienen las direcciones físicas de los equipos (direcciones MAC7). Este sistema también es vulnerable ya que es sencillo capturar las direcciones permitidas por un punto de acceso concreto [33]. 4.3.7 WPA (Wi-Fi Protected Access, también conocido como TKIP) Sistema de cifrado creado para eliminar las principales debilidades de seguridad de las redes sin hilos y de WEP. Se trata de un paso intermedio para sistemas que todavía no son totalmente compatibles con 802.11i, ya que se puede implementar con una sencilla actualización del software de los productos b y gr. Lo cual realiza un proceso de encriptación más fuerte que WEP, pero las claves de cifrado son estáticas [27].. 18.
(19) 4.3.8 WPA2 Utiliza un nuevo sistema de cifrado AES, considerado actualmente el más seguro en cualquier tipo de red, la clave cambia en cada sesión y es diferente para cada usuario. No obstante, el problema continua siendo el cómo conseguir la primera clave, nombrada llave maestra, que se utilizará para la autentificación inicial, y que permitirá conseguir todas las claves subsiguientes. El estándar aconseja IPSec, donde el 802.11i es el paso que lleva las redes sin hilos al mismo estándar de seguridad que las redes fijas [27].. 4.4. Topologías 4.4.1 Red ad hoc En una red inalámbrica ad hoc, la seguridad es un problema fundamental. No se puede confiar en el medio, por lo que se debe usar la criptografía, lo que conlleva a confiar en las claves criptográficas usadas [34]. Las redes ad hoc han sido mayormente usadas en el sector militar, donde establecen una comunicación ad hoc que es a menudo una necesidad.. 4.4.2 MESH: Es una red inalámbrica, descentralizada, punto a punto, compuesta de nodos independientes que se comunican entre sí, siendo estos nodos computadores de escritorio, portátiles, dispositivos móviles como tabletas, Smartphone u otras unidades que soportan el estándar IEEE 802.11 La movilidad de estos nodos la ubican dentro la categoría MANET (Mobile ad hoc network). En este tipo de redes cada nodo propaga la señal haciendo que aumente la cobertura de la red, formando así un cloud mesh [35]. Las redes Mesh maximizan la conectividad eliminando nodos ocultos y facilitar el despliegue mediante la existencia de rutas alternativas, un terminal que no cuente con una buena calidad de enlace con la estación base puede optar por comunicarse directamente con otro terminal que sí cuente con buena conectividad con la estación base; sin embargo calidad de servicio (QoS) es muy baja y no proporcionan grandes capacidades [34]. (NM) Nodo Mesh: Es el responsable de establecer los paths de comunicaciones con el resto de los nodos de la red y mantener las comunicaciones. 19.
(20) . (AP) Capa de Servicio: La funcionalidad de los Nodos Mesh, que permiten crear y gestionar una capa de servicio a los usuarios y sus características, (encriptación, VLAN, tipo de protocolo, etc.). (GT) Gateway: Permite el acceso a la red externa [36]. 20.
(21) 5. ESTUDIO DE ORDEN TÉCNICO: 5.1 Establecer las topologías de red adecuadas para plataformas LEGO, con ayuda de la tecnología WI-FI.. las. Existen muchas topologías para plasmar como son topologías de bus, estrella, malla, entre otras. Las cuales se pueden efectuar con la tecnología WiFi. Las topologías de red permiten la conexión entre segmentos de red remotos, donde estos segmentos pueden pertenecer a edificios diferentes y todo esto para conseguir una conexión donde se utilizan los denominados Wireless Bridges que son puentes de red donde se permite la interconexión de redes de computadoras que operan en la capa 2 (nivel de enlace de datos) del modelo OSI; estos dispositivos pueden ser utilizados en configuraciones punto a punto así como punto multipunto, consiguiéndose alcances de decenas de kilómetros mediante antenas direccionales, en campo abierto y con visión directa. Algunas ventajas de estos puentes son su precio bajo, aísla los dominios de colisión al segmentar la red y no se necesita configuración previa. Pero también se tienen algunas desventajas como son que no se limita el número de reenvíos mediante broadcast, el procesamiento y el almacenamiento introduce retardos y si la red es compleja puede presentar problemas. Actualmente se reconocen 8 topologías básicas que son: . Punto a punto En bus En estrella En anillo En malla En árbol Topología hibrida Cadena margarita. A continuación una breve explicación de cada una de las topologías.. 21.
(22) Topología punto a punto:. Ilustración 3 Topología punto a punto [20]. Las redes punto a punto (ilustración 3) son aquellas que responden a un tipo de arquitectura de red en las que cada canal de datos se usa para comunicar únicamente dos nodos, estos dispositivos actúan como socios entre ellos. Son fáciles de instalar y de operar pero a medida que crecen se vuelven difíciles de manejar, si los dispositivos aumentan decrece la eficiencia de la red.. Topología de bus:. Ilustración 4 Topología bus [20]. Red cuya topología se caracteriza por tener un único canal de comunicaciones obsérvese la ilustración 4, donde es llamado bus troncal o backbone se conecta en los diferentes dispositivos o demás nodos. La ventaja de esta topología es la facilidad de implementación y el crecimiento y simplicidad de arquitectura y la principal desventaja es la longitud de canal limitada que es un problema usual en donde se degrada de la red.. 22.
(23) Topología de estrella:. Ilustración 5 Topología estrella [20]. Es la forma física en que todas las estaciones eran conectadas a un solo nodo central, obsérvese la ilustración 5. Una de las ventajas de esta topología es que permite la comunicación de los demás nodos y se presentan diferentes formas para prevenir problemas en la red y el mantenimiento de las redes es muy económico. Las desventajas que se generan en este tipo de redes que si el hub falla la red no tiene comunicación es decir que si el nodo central falla toda la red se desconecta.. Topología en anillo:. Ilustración 6 Topología anillo [20]. 23.
(24) Esta topología como su nombre lo dice, se compone de un sólo anillo y la principal ventaja que se tiene es la simplicidad en la red y la facilidad en la implementación, obsérvese la ilustración 6. Pero también la desventaja que se tiene es que el canal usualmente degrada la red. Topología en malla:. Ilustración 7 Topología en malla [20]. Esta topología es donde cada nodo está conectado a todos los nodos de esta manera es posible llevar los mensajes de un nodo a otro por diferentes caminos, obsérvese la ilustración 7. Ofrece una redundancia y fiabilidad superior, pero de baja eficiencia de las conexiones y enlaces debido a la existencia de enlaces redundantes. Topología en árbol:. Ilustración 8 Topología árbol [20] Es muy parecida a la red en estrella, pero no tiene un nodo central. Tenemos varios hub o switch, cada uno transmitiendo datos a una red en estrella, obsérvese la ilustración 8. La principal desventaja es que requiere varios hub y gran cantidad de cable, por lo que resulta más costoso, pero al no estar 24.
(25) centralizado, se evita el problema de la interferencia de señales y una mejor jerarquía de la red en otras palabras es un cable de ramificaciones. El cableado es de punto a punto para segmentos individuales pero la desventaja es que cada segmento viene determinada por el tipo de cable si se viene abajo el segmento falla. Topología en hibrida: También llamada topología mixta, es la más común y frecuente, se deriva de la unión de varias topologías de red como por ejemplo bus-estrella, su implementación se debe a la complejidad de la solución de red, o también por el aumento del número de dispositivos por este motivo se hace necesario establecer este tipo de red. Aunque se observa una buena garantía de funcionamiento, es confiable, flexible y efectiva pero el costo es muy elevado debido a su administración y mantenimiento. Topología cadena margarita:. Ilustración 9 Topología cadena margarita [20]. Es llamada también Daisy Chain a un cableado usado en ingeniería eléctrica y electrónica, esta red se puede utilizar en fuentes de potencia, señales analógicas, datos digitales o en una combinación de estas, obsérvese la ilustración 9. Su infraestructura es una sucesión de enlaces tal que un dispositivo A es conectado a un dispositivo B, el mismo dispositivo B conectado a un dispositivo C y así sucesivamente.. A continuación se observa la tabla 2, con un cuadro comparativo de las topologías de red que se pueden implementar con sus ventajas y desventajas.. 25.
(26) Topología Punto a punto. Ventajas. Desventajas. Se utilizan en redes de largo No son muy seguras. alcance. Todos los servidores Fáciles de configurar e instalar. pueden actuar como cliente y como servidor. Menor complejidad. No son escalables. El costo es menor ya que no necesita dispositivos de red ni Reducen tu servidores dedicados. rendimiento. Comparten los recursos de una computadora.. En bus. Facilidad de implementación. Crecimiento y simplicidad.. Longitudes limitadas.. de. canal. El canal usualmente Es una red que no ocupa mucho degrada la señal. espacio. Límite de equipos dependiendo de la calidad de la señal. El desempeño de la red disminuye a medida que la red crece. Altas pérdidas en la transmisión debido a las colisiones entre mensajes. En estrella. Si se rompe un cable la otra parte El costo es elevado de la red sigue su debido a que se funcionamiento. requiere un cable para cada equipo. Es sencilla de reparar. Si el nodo central falla El repetidor permite fácilmente toda la red se añadir equipos. desconecta. Mantenimiento es económico.. En anillo. Simplicidad de arquitectura.. 26. Si se presenta un fallo la red queda aislada..
(27) Facilidad de implementación.. El canal degrada la señal.. El sistema provee un acceso equitativo entre todas las Difícil de diagnosticar y computadoras. reparar los problemas.. El rendimiento no decae cuando Si se envía un paquete muchos usuarios utilizan la red. o un mensaje este puede ser visto por las Arquitectura muy sólida. estaciones intermedias. Facilidad para la fluidez de datos. La transmisión de datos es más lenta que en las otras topologías. En malla. Ofrece una redundancia fiabilidad superior. Son ruteables.. y Es de baja eficiencia de las conexiones y enlaces debido a la existencia de enlaces redundantes. El costo de la red aumenta si se implementa en forma alámbrica.. En árbol. El cableado es de punto a punto Se requiere varios hub y para segmentos individuales. gran cantidad de cable. Facilidad de problemas.. resolución. de Es costosa. La medida de cada segmento viene determinada por el tipo de cable utilizado. Si se cae el segmento principal toda la red falla. Es más configurar.. Topología hibrida. Unión de varios segmentos de El costo red. elevado.. 27. difícil es. de muy.
(28) Su implementación se debe a la Obliga a invertir en un complejidad de la red. equipo adicional para lograr la conectividad deseada. Cadena margarita. Es una sucesión de enlaces.. En la actualidad no se conoce ninguna Se utiliza en ingeniería eléctrica desventaja de esta y electrónica. topología. Se puede utilizar en fuentes de potencia, señales analógicas y datos digitales. Tabla 2 Topologías ventajas y desventajas. Finalmente se analizan las siguientes topologías que se pueden implementar en el proyecto, como son la topología punto a punto, topología bus, topología anillo y topología en malla; se consideran estas topologías debido a que son fáciles de implementar, los costos son económicos, la arquitectura es muy simple, además como es pequeña la red el canal no degrada la señal. 5.2 Implementar una red de comunicación robótica cooperativa, soportada en aplicaciones anteriormente realizadas en el grupo de investigación. Para el desarrollo de este objetivo se realizó una investigación minuciosa de todos los proyectos ejecutados con robots legos, donde se implementa la robótica cooperativa y además cambiar la comunicación que tenía implementada hasta llegar a la comunicación WiFi. A continuación se relaciona algunos de los proyectos que se tuvieron presentes para la elaboración de la plataforma final, entre ellos se analizó los siguientes: Diseño e implementación de un sistema para el desplazamiento en forma de convoy de plataformas móviles Mindstorms NXT 2.0 de lego: Este proyecto fue desarrollado por Christian Mancipe Bernal, para optar al título de Tecnólogo en electrónica. Con este proyecto se buscó el desarrollo de sistemas móviles autónomos y a su vez que respondan a funciones de tipo cooperativo, el objetivo de este proyecto era la interacción de tres legos. 28.
(29) mediante un desplazamiento controlado para así simular una caravana o convoy, en el que cada robot realiza un recorrido de manera controlada. Como objetivo general del proyecto se tenía: Diseñar e implementar un sistema cooperativo para el desplazamiento de vehículos que cumpla una ruta determinada en un entorno conocido y controlado cumpliendo con funciones de convoy utilizando plataformas móviles basadas en Mindstorms NXT 2.0 de Lego. Básicamente el funcionamiento de la plataforma es la siguiente: los robots recorren el camino asignado para cada uno gracias al uso de sensores y actuadores presentes en cada robot y así mismo estos sensores ayudan o permiten obtener medidas del escenario, para así mismo llegar a realizar la ejecución de una tarea donde existiera una cooperación, de ahí que los robots se programaron de tal forma que cada uno de ellos realiza una actividad complementaria y secuencial. La comunicación utilizada entre ellos fue la transmisión de señales de tipo infrarrojo que permitió a los legos cumplir con los requerimientos de trabajo en equipo y cooperación donde la comunicación entre los dispositivos hace que los legos interactúen entre si y trabajen como un equipo. Después de la elaboración de este proyecto surgieron muchas conclusiones donde cada uno de los robots permiten generar soluciones eficientes que pueden llegar a optimizar un proceso; esta cooperación se observa en el momento que el convoy se desplaza, lo cual hace de él un sistema centralizado, en cierta medida esto porque los robots esclavos depende 100% del maestro. DESARROLLO DE COOPERACIÓN PASIVA E IMPLEMENTACIÓN EN PLATAFORMAS MÓVILES LEGO: El proyecto fue desarrollado por Juan Camilo Araque Álvarez y Sindy Lorena Espinosa Torres, para optar al título de Tecnólogos en Electrónica. El objetivo general fue: Diseñar e implementar un sistema de cooperación pasiva por medio de dos plataformas móviles tipo Lego Mindstorms NXT, dentro de un ambiente conocido. Este tipo de proyecto representa una parte de la robótica cooperativa pasiva y busco diseñar sistemas de varios robots capaces de resolver problemas conjuntamente; de tal manera que dicha implementación puede llevar consigo 29.
(30) distintos tipos de control (centralizado o distribuido) utilizando el control distribuido y cada móvil tiene su propio control y envía mensajes del uno al otro. Se desarrolló e implementó dos plataformas autónomas multi-maestro para trabajo cooperativo, aplicada a detección, ubicación y transporte de piezas en un entorno estructurado conocido y un área especificada donde se utilizaron las herramientas que proveen el kit lego Mindstorms NXT 2.0. Se trabaja con dos robots maestros porque no debe haber ningún tipo de comunicación entre los dos y segundo porque cada uno debe ser totalmente autónomo para la ejecución de las órdenes. Utilizaron sensores de ultrasonido que se encargaba de detectar las piezas que se encontraban en el entorno o espacio que los robots manejaban. Otro sensor que se utilizó fue el de color, que permitía verificar si lo que detectaba el sensor de ultrasonido era una caja o era otro robot. También se manejó otros sensores como son el de luz y el sensor magnético. El entorno utilizado fue construido en madera triple de 1.50mt cada lado, nuevamente de color negro al igual que el anterior proyecto, esto para facilitar el reconocimiento del área y los obstáculos. Para realizar la programación se elige el programa gráfico de lego NXT ya que este programa es sencillo de manejar y se encuentra de manera fácil los drivers de los sensores utilizados; es decir, es la ventana de aplicación del programa LabView. De esta forma la robótica se ha convertido en una disciplina de suma importancia para la sociedad, en especial para la industria electrónica ya que dicha disciplina pretende que ciertos procesos o actividades que el hombre debe realizar con demasiado esfuerzo y en los cuales gasta mucho tiempo para su ejecución, puedan ser reemplazados por sistemas autómatas, los cuales puedan realizar esas mismas actividades en un menor tiempo posible. Por este motivo decidieron implementar un proyecto de desarrollo de cooperación pasiva implementada en plataformas móviles LEGO, consultando, diseñando y construyendo dos autónomas que trabajen en un espacio conocido sin que exista comunicación directa entre ellos y al mismo tiempo se encarguen de la organización del espacio conocido. Estos autómatas transportan diferentes figuras hasta un área común, posiblemente se genere interferencia entre los robots y en lugar de cooperar lo que realizan 30.
(31) es estropear el trabajo y esto fue uno de los principales conflictos a la hora de el desarrollo de estos autómatas y se implementó en el grupo de investigación ROMA a nivel de tecnología e innovación. DESARROLLO E IMPLEMENTACIÓN DE PLATAFORMAS MÓVILES PARA TRABAJO COOPERATIVO EN UN ENTORNO CONOCIDO: Este proyecto fue desarrollado por Edwin Andrés Beltrán González y Oscar Felipe Calderón Llanos; para optar al título de Tecnólogos en Electrónica. El objetivo fue Desarrollar e Implementar dos plataformas (robots) móviles para trabajo cooperativo, utilizando Robotics Invention System (R.I.S) 2.0 de Lego Mindstorms, aplicada al movimiento de objetos en un ambiente estructurado conocido que permite el posterior desarrollo de aplicaciones en el área de robótica cooperativa, dentro del grupo de investigación ROMA. Se comprueba nuevamente que la robótica cooperativa busca diseñar sistemas compuestos de varios robots capaces de resolver problemas conjuntamente, de tal manera que dicha implementación puede llevar consigo distintos tipos de control (centralizado o distribuido). El proceso de desarrollo e implementación de una plataforma autónoma multirobot para trabajo cooperativo, aplicada al movimiento de objetos en un entorno estructurado conocido, donde se utilizaron las herramientas que proveen el kit R.I.S.2.0 de Lego Mindstorms, donde se observa la importancia de la investigación y del estudio de la robótica cooperativa; mediante el avance de este proyecto se desarrolló este campo para poder estar a la vanguardia en el contexto mundial de la robótica. De ahí se empezó con el diseño y el desarrollo de cada una de las estructuras de los legos, donde responde a la constante necesidad de buscar nuevas áreas de aplicación para la robótica, dichas plataformas van desde simples modelos electromecánicos hasta sofisticados sistemas autónomos que responden a entornos poco estructurados con una mínima intervención humana, haciendo de estas plataformas potentes sistemas de planificación y actuación, basados en sistemas comunicativos. Una de las principales diferencias del proyecto que se realiza actualmente para el grupo de investigación ROMA, es el aspecto de la comunicación que se realiza e implementa en estos robots como es la utilización de puertos de transmisión infrarroja para la comunicación con el PC y con otros robots, donde. 31.
(32) funciona a una frecuencia de 37KHz, transmitiendo datos a una velocidad aproximada de 2.400 bps. La comunicación entre robots que implementan la robótica cooperativa es uno de los problemas más grandes que se enfrentan, teniendo en cuenta que cada robot está ejecutando una acción propia y debe estar pendiente de los demás robots. Mucha de las investigaciones aplicadas al campo de la inteligencia artificial y la robótica cooperativa están enfocadas en la creación de agentes inteligentes como un sólo sistema central de información y teniendo en cuenta que tienen que trabajar cooperativamente se abre una nueva puerta a la creación y desarrollo de robots multi-agente SMART (Sistema multi-agente robótico). Dado que el sistema se compone de más de un robot es necesario establecer un sistema de comunicación entre ellos. Esta comunicación permite, además, la cooperación de todos los agentes para lograr los objetivos comunes, más allá de que cada integrante del sistema posea sus propios objetivos individuales. Los protocolos de comunicación son los responsables de gobernar las secuencias de mensajes que son intercambiados por los robots, es decir, de cómo transcurren las conversaciones entre ellos. Los objetivos de los agentes y su interés por coordinar, competir o ignorar a los otros agentes de su entorno, y por estos motivos se condicionan los protocolos de interacción que utilizan. Finalmente al desarrollar este proyecto se llega a una conclusión muy importante en donde la robótica cooperativa se basa en la comunicación que es lo principal y lo más significativo para los robots de estas características de cooperación, la plataforma se empezó a implementar utilizando dos prototipos de los cuales se tenían sensores de luz y de contacto; suficientes para procesar información acerca de su entorno y permitiendo la planificación de acciones construyendo el área de trabajo en madera para facilitar el movimiento y de color negro para mejorar la visualización de los sensores y 2 objetos para llegar a ser trasladados por los robots de una manera cooperativa. El software de programación para los robots que se utilizó fue NQC (No completamente C) que es un lenguaje sencillo para programar varios productos del kit LEGO Mindstorms. Algunas de las características de NQC dependen del producto Mindstorms que se utilice. NQC se refiere a los. 32.
(33) diferentes bloques de los legos inteligentes como el destino y actualmente es compatible con el kit Robotics Invention System 2.0. Todos los destinos tienen un intérprete de código de bytes (proporcionado por LEGO) que puede ser utilizado para ejecutar programas. El compilador NQC convierte un programa fuente en LEGO bytecode, para este fin como software de programación se utilizó el Bricx Command Center versión 3.7 que soporta el lenguaje NQC. El trabajo cooperativo que se llegó a lograr fue el diseño de la plataforma para la aplicación de trabajo cooperativo de movimiento de objetos, sin embargo durante el desarrollo del proyecto se presentan dos situaciones, una en donde el robot maestro solicitaba ayuda al robot esclavo para mover el objeto (trabajo cooperativo) y otra en donde el robot maestro trasladaba el objeto solo (no cooperativismo). Finalmente se observa que el mejor proyecto para implementar es el: diseño e implementación de un sistema para el desplazamiento en forma de convoy de plataformas móviles Mindstorms NXT 2.0 de lego, en donde se buscó el diseño y desarrollo de sistemas móviles autónomos y a su vez que respondan a funciones de tipo cooperativo, donde lo que hacían los legos era recorrer un camino asignado, esto con ayuda de sensores y actuadores; de ahí que los legos se programaron de tal forma que cada uno de ellos realiza una actividad complementaria y secuencial. Para la parte de la comunicación esta se realiza por WiFi, donde se implementó con el módulo de arduino ESP8266. Como se puede ver existen diferentes topologías de red y por lo cual se realiza la configuración de dos topologías a implementar, de las cuales se tienen una red WiFi, con una red tipo anillo y tipo árbol. La red tipo anillo, ilustración 10; porque no depende de una infraestructura pre-existente, como routers (en redes cableadas) o de puntos de accesos en redes inalámbricas administradas. En lugar de ello, cada nodo participa en el encaminamiento mediante el reenvío de datos hacia otros nodos, de modo que la determinación de estos nodos hacia la información se hace dinámicamente sobre la base de conectividad de la red.. 33.
(34) Ilustración 10 Red Anillo [20]. Por otro lado, las redes tipo árbol se pueden ver como una combinación de varias topologías en estrella. Esta topología es similar al del bus, cuando el nodo trabaja en forma de difusión, pues la información se propaga hacia todas las estaciones, solo que en esta topología ella se extiende desde el nodo maestro a sus esclavos. Una desventaja de esta red es que a medida que crece la red esta se vuelve más difícil de implementar (mas cable al utilizar) y de configurar, ya que si se cae el nodo principal, se cae toda la red. Se realizó la implementación de estas redes ya que son fáciles de implementar y operar, debido a que son pocos nodos y por lo tanto la configuración es pequeña. 5.3 Especificar las diferentes características de comportamiento de la tecnología WIFI, para futuras aplicaciones en el grupo. La tecnología WiFi a la hora de integrarla en una red para uso doméstico o privado permite encontrar algunos beneficios o desventajas para él uso o destino final que se quiera dar la red; él cual nos proporciona tener acceso a una red o al Internet, pudiendo conectar Videoconsolas, Smartphone, video cámaras, impresoras, computadores de escritorio, portátiles y televisores. Al realizar montajes de redes, su uso facilita la conexión en los sitios en el que el cable no llega o tiene un difícil acceso que es la principal ventaja de internet. Primero que todo observe las ventajas que se tienen en una red WiFi como son:. 34.
(35) . . . Conectividad inalámbrica. Facilidad para crear una red mixta WiFi / Ethernet. Cero cables lo cual permite que al no estar conectado a ningún tipo de cable, se puede desplazar hacia cualquier dirección o lugar como por ejemplo de un habitación a la sala de su casa, además esto facilita la instalación. La norma recomendada para la conexión WiFi que tiene un mayor alcance es la 802.11ac que dispone de mayor protección frente a intrusiones u obstáculos que se tienen del medio y tiene una velocidad de 1.3 Gbps, la siguiente norma es la 802.11n que se puede implementar y que soporta todos los dispositivos de WiFi con tecnologías resientes y tiene una velocidad máxima teórica de 600 Mbps. La movilidad se destaca desde la comodidad que ofrece, que es muy superior a las redes cableadas porque cualquiera que tenga acceso a la red puede conectarse desde distintos puntos dentro de un rango suficientemente amplio, es decir que cualquier dispositivo se puede conectar, en cualquier lugar desde que se encuentre al alcance de la red, lo que admite el uso múltiple de la red por varios usuarios al mismo tiempo. Elección de varias señales libres o con seguridad. Flexibilidad Escalabilidad Casi la totalidad de los ordenadores portátiles o notebooks que salen al mercado cuentan ya con adaptador WiFi integrado.. Una vez configuradas, las redes WiFi permiten el acceso de múltiples ordenadores sin ningún problema ni gasto en infraestructura, lo contrario a la tecnología por cable y por otro lado WiFi Alliance asegura que la compatibilidad entre dispositivos con la marca WiFi es total, con lo que en cualquier parte del mundo se puede utilizar la tecnología WiFi con una compatibilidad total. Pero así mismo como tenemos ventajas también se tienen algunas desventajas como son: . Falla en la conexión, debido a que la señal puede bloquearse o presentar interferencias. Distancia limitada para la recepción de la señal.. 35.
(36) . Facilidad de hackeo, ya que es muy vulnerable a los ataques de usuarios ajenos y esto se da por malas configuraciones en las opciones de seguridad del dispositivo ya sea un computador, un celular o una tableta. Por todos estos motivos es aconsejable tener los drivers del controlador WiFi actualizados.. La velocidad que alcanzan es baja en comparación con la de un cable de red, algunos fabricantes se basan en las diferentes normas que existen, pero que rara vez se cumplen sobre todo en las velocidades, todos estos dispositivos que tienen protocolo WiFi son examinados y ensayados en espacios óptimos para que cumplan con los estándares de calidad que exige la norma. Es posible que el sitio donde se utilizara el dispositivo tenga ruido o interferencias provocadas por un vecino o vecinos que utilicen la misma frecuencia de canal y otro motivo son las paredes de ladrillo u hormigón de los lugares donde vivimos, estos hechos ocasionaran que la velocidad disminuya y que absorban la señal. El Hardware de distintos fabricantes puede ocasionar fallos a la hora de configurar los dispositivos y también hay que señalar que esta tecnología no es compatible con otros tipos de conexiones sin cables como Bluetooth, GPRS, UMTS y otros.. Los routers o puntos WiFi los podemos encontrar de 1, 2 o 3 antenas. Al trabajar con la norma 802.11N que es la que nos da más seguridad y rendimiento, el fabricante añade una numeración detrás de la letra N que nos dice las características que posee. Estas nomenclaturas son las utilizadas por los routers y puntos de acceso: . . N150: Wireless a una velocidad de hasta 150Mbps en la banda de 2.4GHz. Tiene tan sólo una antena interna (One-stream). N300: Wireless a una velocidad de hasta 300Mbps en la banda de 2.4GHz, en algunas ocasiones hacen referencia a doble banda seleccionable (selección de una banda u otra, de tal forma que máximo hasta 300Mbps). Tiene dos antenas (Two-stream) y gracias a ellas conseguimos la velocidad (siempre y cuando usemos los 40MHz de ancho de canal). N450: Wireless a una velocidad de hasta 450Mbps en la banda de 2.4GHz, en algunas ocasiones hacen referencia a doble banda seleccionable (selección de una banda u otra, de tal forma que máximo hasta 450Mbps). Tiene tres antenas (Three-Stream) y gracias a ellas conseguimos la velocidad prometida teórica (siempre y cuando usemos los 40MHz de ancho de canal).. 36.
(37) . . . N600: Wireless con doble banda simultánea a una velocidad de hasta 300Mbps en cada banda de frecuencias (Two-stream). 300Mbps en 2.4GHz + 300Mbps en 5GHz = 600Mbps de rendimiento máximo inalámbrico. Tiene dos antenas por cada banda de frecuencias, y si las antenas son duales (emiten en ambas bandas simultáneamente), tiene dos amplificadores de señal para cada banda. Conseguiremos la velocidad siempre y cuando usemos los 40MHz de ancho de canal. N705: Wireless con doble banda simultánea a una velocidad de hasta 300Mbps en la banda de 2.4GHz (Two-Stream y dos antenas) y hasta 450Mbps en la banda de 5GHz (Three-Stream y tres antenas). Conseguiremos la velocidad siempre y cuando usemos los 40MHz de ancho de canal. N900: Wireless con doble banda simultánea a una velocidad de hasta 450Mbps en las dos bandas, es Three-Stream en las dos bandas de frecuencias y necesitaremos 3 antenas por cada banda .Conseguiremos la velocidad siempre y cuando usemos los 40MHz de ancho de canal.. Existen muchas aplicaciones para elaborar y realizar mejoras de los proyectos ya implementados con robos Lego NXT, como es el caso de uno de los proyectos denominado: Diseño e implementación de un sistema para el desplazamiento en forma de convoy de plataformas móviles Mindstorms NXT 2.0 Lego, en la cual se realiza la comunicación por vía Bluetooth y esta comunicación tiene un alcance muy pequeño; en cambio el alcance de la tecnología WiFi es muy amplio, de ahí la principal ventaja para la realización e implementación del proyecto.. 37.
(38) 6. TECNOLOGÍAS DE LA INFORMACIÓN. En la tabla 3, se observa una comparación de las diferentes tecnologías de la información: TECNOLOGÍA DEFINICIÓN. VENTAJAS. DESVENTAJAS. WIFI. •La comodidad que ofrecen es muy superior a las redes cableadas porque cualquiera que tenga acceso a la red puede conectarse desde distintos puntos dentro de un rango suficientemente amplio de espacio.. •Menor velocidad en comparación a una conexión con cables, debido a las interferencias y pérdidas de señal que el ambiente puede acarrear.. Es un mecanismo de conexión de los dispositivos electrónicos de forma inalámbrica. Los dispositivos habilitados con WiFi pueden conectarse a Internet a través de un punto de acceso de red inalámbrica. Dicho punto de acceso (o hotspot) tiene un alcance de unos 20 metros (65 pies) en interiores y al aire libre una distancia mayor.. •La WiFi Alliance Funcionan con asegura que la bandas de 2.4 y 5 compatibilidad GHz de radio. entre dispositivos con la marca WiFi es total, con lo que en cualquier parte del mundo podremos utilizar la tecnología WiFi con una compatibilidad total. Bluetooth. Bluetooth es una •Inalámbrico especificación industrial para Redes •Barato. 38. •Existen algunos programas capaces de capturar paquetes, trabajando con su tarjeta WiFi en modo promiscuo, de forma que puedan calcular la contraseña de la red y de esta forma acceder a ella.. •Velocidad de transmisión muy lenta para.
(39) Inalámbricas de Área Personal (WPAN) que posibilita la transmisión de voz y datos entre diferentes dispositivos mediante un enlace por radiofrecuencia en la banda ISM de los 2,4 GHz.. •Automático •Compatibilidad •Baja interferencia •Intercambio voz y datos. •Cuando es usado de inadecuadament e, podemos recibir mensajes y archivos indeseados.. Se denomina Bluetooth al protocolo de comunicaciones diseñado especialmente para dispositivos de bajo consumo, que requieren corto alcance de emisión y basados en transceptores de bajo costo.. Infrarrojo. Las redes por infrarrojos nos permiten la comunicación entre dos modos, usando una serie de leds infrarrojos para ello.. Se trata de emisores/receptores de las ondas infrarrojas entre ambos dispositivos, cada dispositivo necesita al otro para. 39. transferencia de archivos pesados (1 MB/seg).. •Limitado radio de acción entre los periféricos (30 pies entre ellos). •Limitación entre la cantidad de periféricos que podemos usar. •Gasta mucha energía de la batería, cuando está en el modo visible. •La tecnología infrarrojo cuenta con muchas características sumamente atractivas para utilizarse en WLAN).. •Es sumamente sensible a objetos móviles que interfieren y perturban la comunicación entre emisor y receptor.. •Ofrece una amplio ancho de banda que transmite señales a velocidades muy altas. •Las restricciones en la potencia de transmisión limitan la cobertura de estas redes a unas cuentas.
(40) realizar comunicación.. la (alcanza los 10 decenas Mbps). metros. •Tiene una longitud de onda cercana a la de la luz y se comporta como ésta (no puede atravesar objetos sólidos como paredes, por lo que es inherentemente seguro contra receptores no deseados).. de. •La luz solar directa, las lámparas incandescentes y otras fuentes de luz brillante pueden interferir seriamente la señal.. •Utiliza un protocolo simple y componentes sumamente económicos y de bajo consumo de potencia. Tabla 3 Tecnologías de la información. 6.1. Comportamiento de la tecnología WiFi. Para entender cómo se propagan nuestras ondas WiFi se usará una analogía que hará mucho más fácil entender ciertas cosas. Se conoce un típico ejemplo de las linternas donde una está ubicada en un sitio y la otra en otro punto, de esta manera se empezará a realizar señales esto se puede realizar en las horas de la noche, de esta forma se analiza que sin visión directa pocas señales se van a ver. En la tecnología WiFi pasa algo muy similar. Pero también si hay demasiada luz tampoco se observará la linterna del otro olas señales; de esta forma se puede catalogar la luz del sol como ruido, de ahí se comprende porque es tan importante la SNR (relación señal ruido).. 40.
(41) Por otro lado una de las funcionalidades más novedosas de Acrylic WiFi Professional es la existente en la pantalla Stations, desde donde es posible ver el comportamiento de dispositivos WiFi y mucha información relativa a su funcionamiento. Cuando se realiza una captura de tráfico en modo monitor se obtienen todos los paquetes de red wireless enviados por cada dispositivo. Mediante el análisis de este tráfico es posible saber de qué modo se está comportando un dispositivo WiFi detectado y se clasifica de la siguiente manera:. . Undefined Active: Se encuentra en esta categoría todo aquel dispositivo que ha sido visto enviando tráfico de red y la dirección MAC del dispositivo se ha visto como origen de un FrameWiFi.. . Undefined Passive: Se encuentra en esta categoría un dispositivo que no ha sido visto directamente, por no encontrarse al alcance, pero que se infiere su existencia dado que se ha visto la MAC como destino de un paquete WiFi. Es muy fácil que este asigne este estado cuando estamos viendo una MAC de un dispositivo que está en el otro extremo de la zona de cobertura de un punto de acceso WiFi.. . Access Point: Dispositivo que se encuentra propagando una red WiFi (SSID) en mensajes emitiendo redes inalámbricas con paquetes management de tipo Beacon.. . Connected: El dispositivo está conectado a una red WiFi (Access Point) y está intercambiando tráfico con el AP.. . Requesting: El dispositivo pregunta si existen redes WiFi disponibles. Este comportamiento también se puede encontrar en puntos de acceso con capacidades WIDS.. A continuación, se presenta una tabla 4, que compara las distintas tecnologías que se podían implementar para el desarrollo del proyecto:. 41.
(42) Como es la tecnología de Arduino y Xbee: TECNOLOGIA. VENTAJAS. DESVENTAJAS. Arduino. Fáciles de programar y trae el programador incorporado, además las librerías facilitan su programación.. Algunas librerías no las trae y por este motivo se retrasa la ejecución de los proyectos.. El hecho de que la Se consiguen replicas plataforma venga ya muy fáciles en ensamblada le quita Colombia. flexibilidad a los proyectos. Tiene una plataforma de código y hardware abierto. El costo es muy bajo. Se pueden utilizar en muchas aplicaciones. Xbee. No necesitan Los rangos de alcance configuración. son menores a 75 metros y pertenece a Comunicación punto a las redes WPAN punto, punto multipunto. Tasa de transferencia baja. Bajo costo. Sólo manipula textos La comunicación de los pequeños comparados módulos es con otras tecnologías. bidireccional. Tecnología inalámbrica. Tabla 4 Tecnologías para implementar. 42.
(43) 7. PROCEDIMIENTO El proyecto se inició con la implementación de una estructura robótica de legos; donde se tiene un maestro y un esclavo, cada uno con dos sensores de luz y un sensor de ultrasonido para los esclavos. Se destacan las siguientes etapas en el proyecto, ver ilustración 11. . Etapa de ensamble de los legos Etapa de modificación del proyecto (Diseño e implementación de un sistema para el desplazamiento en forma de convoy de plataformas móviles Mindstorms NXT 2.0 de lego) de robótica cooperativa. Etapa de comunicación I2C Etapa de comunicación WiFi. 43.
(44) Ilustración 11. Metodología En primer lugar se analizaron los proyectos realizados en el grupo de investigación ROMA basados en robótica cooperativa, de los cuales se escogió el proyecto denominado: Diseño e implementación de un sistema para el desplazamiento en forma de convoy de plataformas móviles Mindstorms NXT 2.0 de lego. La razón principal para escoger esta plataforma es que cumple con las condiciones iniciales para la elaboración de una red. 44.
(45) WiFi, donde se tienen tres legos, que realizan un desplazamiento controlado. Lo cual facilita la creación de la red. Una vez seleccionado el proyecto (Convoy); se empieza a ensamblar cada uno de los legos con dos ruedas normales en la parte delantera y una rueda loca en la parte de atrás, la cual facilita los movimientos del lego. El convoy consta de un lego maestro y dos esclavos, estos legos llevan dos sensores de luz que van ubicados en la parte de adelante del lego y hacia el piso, esto para detectar el color por donde pasa el lego ya que el sensor emite un valor de un rango de 0 a 255; es decir que el sensor al pasar por un color emite un reflejo diferente y el otro sensor a utilizar es, el de ultrasonido; este sensor ayuda a que los legos esclavos no se estrellen y se detengan cuando detecten un obstáculo a los 25 centímetros. Los otros componentes utilizados para el ensamblaje de los legos para cumplir con la red WiFi son: . Un Brick programable NXT Dos servomotores Un Sensor de ultrasonido (Esclavos) Dos sensores de luz Un módulo WIFI Una tarjeta procesadora ARDUINO. Las dimensiones de cada una de los legos son: . Peso: 698 Gr. Largo: 26 cm. Alto: 8 cm. Ancho: 20 cm.. Este es el diagrama de flujo del movimiento del lego, ilustración 12; donde se observa la explicación de los movimientos del lego:. 45.
(46) Ilustración 12 Diagrama Movimiento del lego. 46.
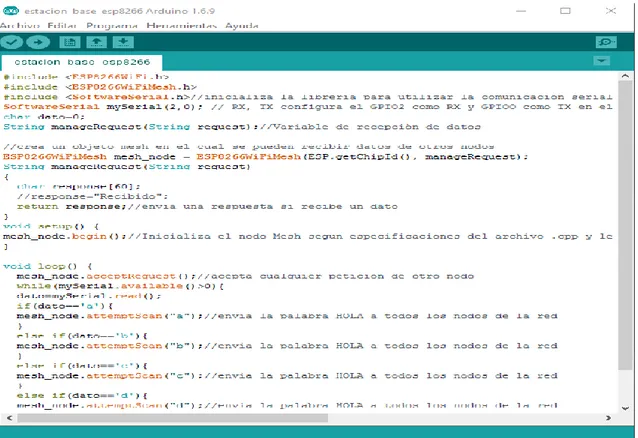
(47) Ilustración 13. Programación LEGO. En la Ilustración 13, se observa la programación de los sensores: Para el sensor de ultrasonido el código se basa simplemente en medir una distancia; donde la distancia es 30 centímetros, si esta distancia es menor el lego se detiene para evitar que se estrellen cuando el dato vuelve a ser mayor o igual a 30 el lego arranca Para realizar esta acción se tiene una condición de tipo Boolean (Permite almacenar datos enteros, reales que es d1= 30). El sensor de luz esta calibrado según el color blanco, negro o rojo de ahí que es un valor. 47.
Figure
![Ilustración 1 Desarrollo por el método de prototipos [8].](https://thumb-us.123doks.com/thumbv2/123dok_es/7296876.350020/11.918.266.693.750.1012/ilustración-desarrollo-método-prototipos.webp)



+7




Documento similar
En este proyecto se ha unificado el desarrollo de aplicaciones para dispositivos móviles S40 de Nokia con la tecnología NFC, dando como resultado la aplicación “Smart-Info UPCT”,
"No porque las dos, que vinieron de Valencia, no merecieran ese favor, pues eran entrambas de tan grande espíritu […] La razón porque no vió Coronas para ellas, sería
Cedulario se inicia a mediados del siglo XVIL, por sus propias cédulas puede advertirse que no estaba totalmente conquistada la Nueva Gali- cia, ya que a fines del siglo xvn y en
Missing estimates for total domestic participant spend were estimated using a similar approach of that used to calculate missing international estimates, with average shares applied
Habiendo organizado un movimiento revolucionario en Valencia a principios de 1929 y persistido en las reuniones conspirativo-constitucionalistas desde entonces —cierto que a aquellas
[r]
SECUNDARIA COMPRENDE LOS
[r]
