INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA SECCION DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN
“Diseño y Construcción de un Transductor Acústico
Electromagnético”
Tesis que para obtener el Grado de:
Maestro en Ciencias en Ingeniería Electrónica
Presenta
Ing. Nathalia Rivera Rodríguez
Directores de Tesis: Dr. José Hiram Espina Hernández
Dr. Suren Stolik Isakina
Para Emiliano, mi hijo...
A Clemencia y Rusvel, mis padres...
Resumen
Esta tesis esta relacionada con la generación de ondas ultrasónicas utilizando un transduc-tor acústico electromagnético (EMAT, por sus siglas en Inglés), para medir espesores en placas de Aluminio. Se ha utilizado un EMAT que permite generar ondas ultrasónicas transversales a la superficie. El transductor EMAT está formado por dos elementos esenciales, la bobina de excitación-detección y los imanes permanentes. La bobina de excitación-detección del EMAT tiene un radio exterior de aproximadamente 7,42 mm, un radio interior de 3,22 mm, un espesor de 0,7mm, y fue construida utilizando alambre de cobre calibre 21. La bobina se excita a una frecuencia de 400 kHz con una corriente pico de 6 A. La excitación de la bobina del EMAT se realiza con el generador RF COMDEL 5000/PLL. Se realizó la caracterización del generador RF la que nos permitió conocer las características de funcionamiento del generador cuando se controla de forma remota a través de la interfaz analógica que tiene incorporada el mismo. Los imanes permanentes son de NdFeB Grado 35 que generan un campo magnético estático en su superficie de 1,17 T. Sobre los imanes permanentes se colocó una placa de acero para ce-rrar las líneas de flujo magnético. La bobina de excitación-detección detecta la onda acústica generada una vez que rebota de la parte inferior de la placa a la superficie. Se estudiaron tres placas de aluminio con espesor de 3,8,2,4,y 1,2 cm. Se realizaron mediciones fijando el cabe-zal de excitación-detección sobre la placa de prueba adquiriendo la señal EMAT y evaluando la señal después de deshabilitar la excitación. El parámetro principal extraído de las señales en el tiempo registradas en cada caso es el tiempo de relajación tn que se obtuvo a partir de
las mediciones y que depende del espesor de la placa. La diferencia△tn entre el tiempo de
Abstract
This thesis is related to the generation of ultrasonic waves using an Electromagnetic Acoustic Transducer (EMAT) to measure the thickness of aluminium plates. We have used the EMAT to generate transverse ultrasonic waves on the surface of aluminium plates. The EMAT is formed by the detection coil and two permanent magnets. The excitation-detection coil of the EMAT has an outer radius of about 7,42 mm, an inner radius of 3,22 mm,
thickness of 0,7mm, and was built using 21 gauge copper wire. The coil is energized with a
sinusoidal current, having a peak value of 6 A, at a frequency of 400 kHz. The excitation of the EMAT’s coil is performed using the COMDEL 5000/PLL RF generator. The characteri-zation of the RF generator was necessary in order to know the performance characteristics of the generator, which can be controlled remotely via a built-in analog interface. The
perma-nent magnets are of NdFeB (Grade 35), which produce a static magnetic field of 1,17 T at
the surface. A steel plate is placed above the permanent magnets to close the magnetic flux lines. The excitation-detection coil detects the generated sound wave once it bounce back at the bottom of the plate. Three plates of aluminum with thickness of 3,8,2,4 and 1,2 cm were studied. Measurements were performed by putting the EMAT probe at the surface of the test plate and the EMAT signal is acquired during the turn-off time of the RF generator. The main extracted parameter from the signals in the time domain is the relaxation time tn, which was
obtained from measurements. It is demonstrated that tndepends on the thickness of the plate.
The difference (△tn) between the relaxation time when measuring the aluminium plates and
Acrónimos y Abreviaturas
A: Ampere, unidad de corriente AC: Corriente alterna
AWG: Siglas en inglés American wire gauger, definiendo el calibre del alambre
B: Densidad de flujo magnético
e
B: Densidad de flujo magnético (variante)
B: Densidad de flujo magnético estático Br: Remanencia
cm: Centímetros, definiendo unidades de distancia d: Distancia
DC: Corriente directa De: Diámetro exterior
Di: Diámetro interior
E: Intensidad de campo eléctrico e: carga del electrón
EMAT: Transductor Acústico Electromagnético, por sus siglas en inglés END: Evaluación No Destructiva, por sus siglas en inglés
FE: Elemento Finito, por sus siglas en inglés
F: Fuerza de Lorentz f: Frecuencia
G: Módulo elástico Transversal en el material
H: Intensidad de campo magnético
H: Henry, unidad de inductancia Hz: Hertz, unidades de frecuencia I: corriente eléctrica
J: Densidad de corriente
Je: Densidad de corriente inducida
M: Magnetización
mm: Milímetros, definiendo unidades de distancia N: Densidad de los iones
NdFeB: Simbolo químico de Neodimio-Hierro-Boro Np: Número de vueltas del primario (transformador)
SNR: siglas del inglés signal-to-noise ratio, definiendo la relación señal a ruido p: función periódica
Pa: Pascales, unidad de Presión
PPM: Imán Permanente Periódico, por sus siglas en inglés R: Radio
RF: Radiofrecuencia
T: Tesla, unidad de densidad de flujo magnético tn: Tiempo de relajación del apagado del generador RF u: Vector de desplazamiento
ve: Velocidad media del electrón
vi: Velocidad de los iones
V: Volts, unidades de voltaje
V: Velocidad
Vs: Velocidad de la onda transversal W: Watts, unidades de potencia Z: Impedancia eléctrica
δ: Profundidad de penetración de las corrientes de remolino
µ0: Permeabilidad magnética en el espacio libre
µr: Permeabilidad relativa
σ: Conductividad eléctrica
σs: Estrés
ρ: Densidad de masa del material
λ: Longitud de onda
ω: Frecuencia angular
Índice general
Introducción 1
1. Estado del Arte y Revisión Bibliográfica 4
1.1. La evaluación no destructiva de materiales por ultrasonido . . . 4
1.2. El EMAT . . . 5
1.3. Historia del desarrollo del EMAT . . . 5
1.4. Operación básica del EMAT . . . 7
1.5. Ventajas y limitaciones de los EMATs . . . 8
1.6. Clasificación de los EMATs . . . 9
1.7. Mecanismo de generación de la onda acústica por fuerza de Lorentz . . . 12
1.7.1. La fuerza de Lorentz . . . 13
1.7.2. El mecanismo de recepción . . . 14
1.8. Ondas acústicas para las propiedades ultrasónicas de los materiales . . . 14
1.8.1. Longitud de onda y frecuencia . . . 15
1.8.1.1. La onda ultrasónica . . . 16
1.8.2. Relación entre las propiedades mecánicas y la propagación de ondas . 16 1.9. Pasos para la construcción de un EMAT . . . 17
1.9.1. La bobina de excitación . . . 17
1.9.2. Los imanes permanentes . . . 18
1.9.3. El acoplamiento de Impedancia . . . 19
1.9.3.1. Redes de Acoplamiento . . . 19
1.9.3.2. Relación de voltaje de subida . . . 21
1.9.3.3. Transformadores . . . 21
1.10. Instrumentación utilizada con EMATs . . . 22
2. Sistema Experimental 24 2.1. Introducción . . . 24
2.2. El cabezal de excitación-detección EMAT . . . 24
2.2.1. Principio físico de la configuración del EMAT propuesto . . . 25
2.2.2. La bobina de excitación del EMAT . . . 27
2.2.3. Los imanes permanentes del EMAT . . . 28
2.3.1. Control remoto por la interfaz analógica . . . 29
2.4. El sistema de medición . . . 33
2.5. Principio de medición . . . 36
2.6. Características del material de prueba . . . 37
2.7. Resultados del capítulo . . . 37
3. Diseño y caracterización del cabezal EMAT 39 3.1. Introducción . . . 39
3.2. Medición de la impedancia de la bobina de excitación-detección . . . 39
3.2.1. Simulación eléctrica de la bobina de excitación-detección . . . 40
3.3. Medición de la impedancia del cabezal de excitación-detección EMAT . . . . 41
3.4. Acoplamiento de impedancia . . . 42
3.5. Simulación del EMAT . . . 42
3.5.1. Solución numérica con las ecuaciones correspondientes . . . 43
3.5.2. Simulación de la onda acústica generada por el EMAT . . . 44
3.6. Resultados del capítulo . . . 47
4. Medición de espesores en placas de Aluminio 49 4.1. Introducción . . . 49
4.2. Descripción fenomenológica de las mediciones con el EMAT . . . 49
4.3. Mediciones de la señal EMAT y análisis en el dominio del tiempo . . . 50
4.4. Análisis en el dominio de la frecuencia . . . 56
4.5. Resultados del capítulo . . . 61
Conclusiones 62
Trabajo a Futuro 63
Anexo A 64
Anexo B 69
Anexo C 75
Anexo D 85
Publicación 89
Bibliografía 90
Índice de Figuras
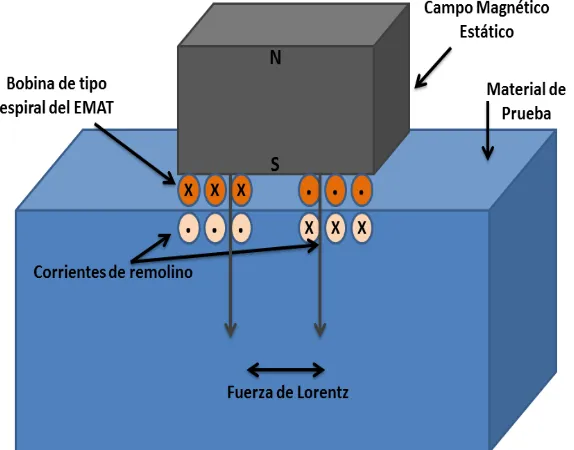
1.1. Fuerza de Lorentz: una corriente de excitación provoca una densidad de co-rrientes de remolino en la muestra. La presencia de una densidad de flujo mag-nético estático genera la Fuerza de Lorentz sobre las cargas en movimiento en
el material. . . 7
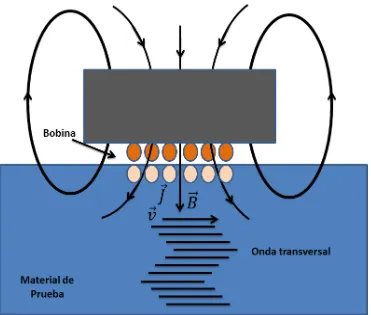
1.2. EMAT que genera ondas transversales en el material de prueba. Las lineas de flujo del campo magnético estático son normales a la muestra. . . 10
1.3. EMAT que genera ondas longitudinales en la muestra. Las líneas del flujo magnético estático son paralelas a la muestra. . . 11
1.4. Representación de una onda transversal pasando a lo largo de la dirección-x. El desplazamiento perpendicular de la dirección que viaja es a(x). . . 17
1.5. Red de acoplamiento en serie. . . 19
1.6. Conversión de la forma paralela a serie. . . 20
1.7. Sistema Experimental EMAT tomado de [34]. . . 22
1.8. Sistema experimental EMAT tomado de [35]. . . 23
2.1. Esquema del cabezal de excitación EMAT: 1) Placa de acero, 2) y 3) Imanes permanentes de NdFeB, 4) Bobina de excitación para la generación de las corrientes de remolino en la placa de aluminio y 5) Muestra de aluminio. . . . 25
2.2. Principo Físico del EMAT de la configuración propuesta. . . 26
2.3. Voltaje de salida en función de la potencia para ZL=50Ω. . . 29
2.4. Corriente de salida en función de la potencia para ZL=50Ω. . . 30
2.5. Conector de interfaz analógca para en control remoto del generador RF. Se muestran las tres señales utilizadas. . . 31
2.6. Señal de salida del generador de RF (Vsal) junto con la señal de control ENABLE IN RF. Se muestran los tiempos de activación tAG y de estabili-zación tEGdel Generador de RF. . . 32
2.7. Señal de salida del generador de RF (Vsal) junto con la señal de control ENABLE IN RF. Se muestra el tiempo de apagado tApG del generador de RF. . . 32
2.8. Señal de salida del generador de RF cuando se le conecta una ZL=50Ω. . . 33
2.9. Diagrama de bloques del sistema experimental EMAT. . . 34
2.10. Señales de disparo y control de las mediciones con el sistema experimental
utilizado. . . 34
2.12. Sistema experimental de medición EMAT. . . 35
3.1. Gráfica del módulo de la impedancia con respecto a la frecuencia de la bobina de excitación-detección . . . 39
3.2. Circuito equivalente de la bobina de excitación-detección. . . 40
3.3. Simulación eléctrica de la bobina de excitación-detección en el programa si-mulink. a) Parte real y b) parte imaginaria de la bobina de excitación-detección. 40 3.4. Impedancia del cabezal EMAT obtenida con el analizador de redes HEWLET 4195A. . . 41
3.5. Desplazamiento total de la onda acústica en el aluminio. . . 43
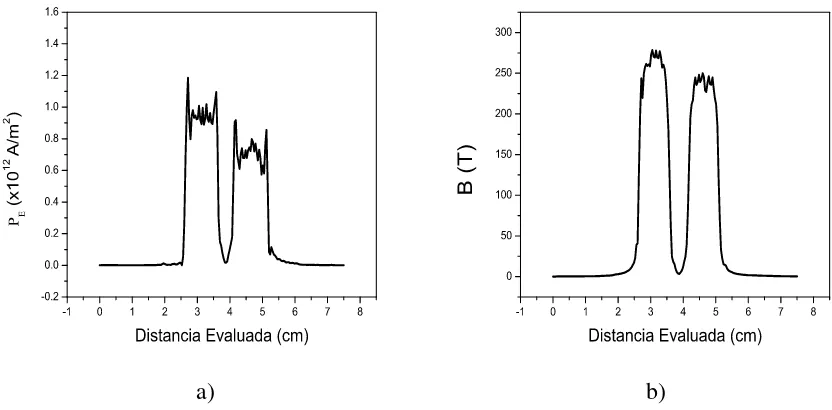
3.6. a) Densidad de corriente total en la placa de Aluminio y b) Densidad de flujo Magnético. . . 44
3.7. a) Campo Eléctrico inducido y b) Campo Magnético inducido. . . 44
3.8. a) Componente de la Fuerza de Lorentz en el plano X y b) en el plano Y. . . . 45
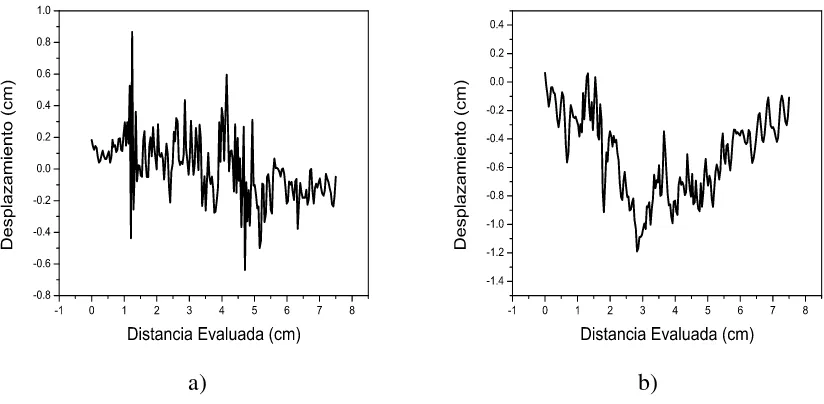
3.9. a) Desplazamiento de la onda acústica en el aluminio en el plano X y b) Des-plazamiento de la onda acústica en el aluminio en el plano Y. . . 45
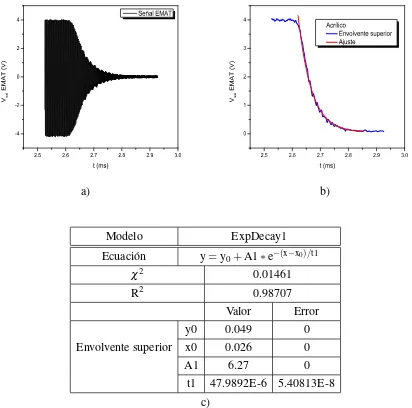
4.1. a) Señal del EMAT en el tiempo de la placa de Acrílico, b) Envolvente su-perior y ajuste utilizando la ecuación 4.1 realizado para obtener el tiempo de relajación en la placa de acrílico; c) Valores de los parámetros del ajuste. . . 50
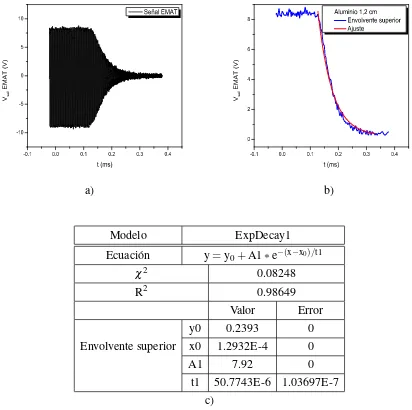
4.2. a) Señal EMAT en el tiempo de la placa de 1.2 cm de espesor; b) Envolvente y ajuste realizado utilizando la ecuación 4.1 para obtener el tiempo de relajación en la placa de aluminio; c) Valores de los parámetros obtenidos del ajuste. . . 51
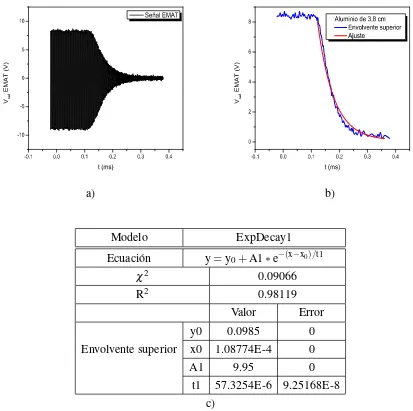
4.3. a) Señal EMAT en el tiempo de la placa de 3.8 cm de espesor; b) Envolvente y ajuste realizado utilizando la ecuación 4.1 para obtener el tiempo de relajación en la placa de aluminio; c) Valores de los parámetros obtenidos del ajuste. . . 52
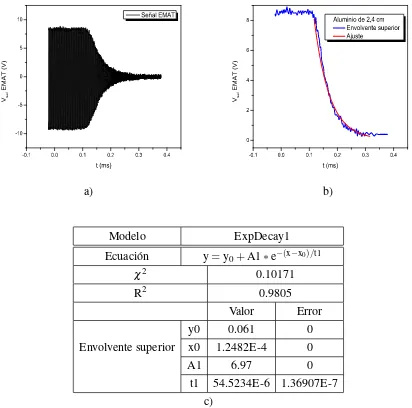
4.4. a) Señal EMAT en el tiempo de la placa de 2.4 cm de espesor; b) Envolvente y ajuste realizado utilizando la ecuación 4.1 para obtener el tiempo de relajación en la placa de aluminio; c) Valores de los parámetros obtenidos del ajuste. . . 53
4.5. Respuesta del tiempo de relajación dependiendo de la placa analizada. . . 54
4.6. Análisis en frecuencia de la placa de 1.2 cm. . . 56
4.7. Análisis en frecuencia de la placa de 2.4 cm. . . 57
4.8. Análisis en frecuencia de la placa de 3.8 cm. . . 58
B-1. Propagación de la onda acústica en el material para un instante de tiempo de 0,25 µs . . . . . . 69
B-2. Propagación de la onda acústica en el material para un instante de tiempo . . . 70
B-3. Propagación de la onda acústica en el material para un instante de tiempo . . . 71 de 1,75 µs . . . .
B-4. Propagación de la onda acústica en el material para un instante de tiempo
. . . 72
B-5. Propagación de la onda acústica en el material para un instante de tiempo
. . . 73
C-1. Se muestra la señal en el tiempo, la envolvente superior y el ajuste realizado, y
la tabla con los valores de los parámetros de ajuste de una de las mediciones
en la placa de acrílico. . . 76 C-2. Se muestra la señal en el tiempo, la envolvente superior y el ajuste realizado, y
la tabla con los valores de los parámetros de ajuste de una de las mediciones
en la placa de acrílico. . . 77
C-3. Se muestra la señal en el tiempo, la envolvente superior y el ajuste realizado, y
la tabla con los valores de los parámetros de ajuste de una de las mediciones
en la placa de aluminio de 1.2 cm. . . 78
C-4. Se muestra la señal en el tiempo, la envolvente superior y el ajuste realizado, y
la tabla con los valores de los parámetros de ajuste de una de las mediciones
en la placa de aluminio de 1.2 cm. . . 79 C-5. Se muestra la señal en el tiempo, la envolvente superior y el ajuste realizado, y
la tabla con los valores de los parámetros de ajuste de una de las mediciones
en la placa de aluminio de 2.4 cm. . . 80
C-6. Se muestra la señal en el tiempo, la envolvente superior y el ajuste realizado, y
la tabla con los valores de los parámetros de ajuste de una de las mediciones
en la placa de aluminio de 2.4 cm. . . 81
C-7. Se muestra la señal en el tiempo, la envolvente superior y el ajuste realizado, y
la tabla con los valores de los parámetros de ajuste de una de las mediciones
en la placa de aluminio de 3.8 cm. . . 82 C-8. Se muestra la señal en el tiempo, la envolvente superior y el ajuste realizado, y
la tabla con los valores de los parámetros de ajuste de una de las mediciones
en la placa de aluminio de 3.8 cm. . . 83 de 8,25 µs . . . .
Índice de Tablas
2.1. Dimensiones físicas de la bobina de excitación y detección. . . 26
2.2. Características físicas de los imanes utilizados en la construcción del EMAT. 27
2.3. Especificaciones eléctricas del generador RF CLF5000/PLL. . . 28
2.4. Correspondencia lineal del SETPOINT y la potencia entregada a la salida del
generador de RF. . . 30
2.5. Valores obtenidos para los tiempo característicos t AG, tEG y tApGdel generador RF.. . . 32
4.1. Valores obtenidos de los tiempos de relajación tnpara cada una de las
medi-ciones de las placas de aluminio y el acrílico como material de referencia. . . 52
4.2. ∆tnobtenidos a partir de los tiempos de relajación tnpara cada placa de
prue-ba. . . 54
4.3. Espesor estimado a partir del tiempo ∆t¯n y la Vs de la onda generada en el
aluminio. . . 55
4.4. Valores de la posición y amplitud de los picos en el espectro de amplitud con
ventana Hamming. . . 59 4.5. Valores de la posición y amplitud de los picos en la densidad espectral Pwelch. 60
A-1. Voltaje mínimo de salida del generador RF con una carga resistiva de 50 Ω. . 64
A-2. Corriente mínima de salida del generador RF con una carga resistiva de 50 Ω. 65 A-3. Valores de la impedancia de la bobina de excitación-detección sin el EMAT. . 66
Introducción
Los sistemas de evaluación no destructiva utilizando principios electromagnéticos de de-tección se introducen en la industria en la década de los 50s y 60s del siglo pasado iniciando así un nuevo campo de investigación en el estudio de materiales y en el desarrollo de técnicas de instrumentación electrónica.
En la actualidad existe un gran número de técnicas de evaluación no destructiva (END) de materiales que incluyen ultrasonido, radiografías, líquidos penetrantes, mediciones de ruido magnético Barkhausen, detección de pérdidas de flujo magnético y corrientes de remolino. Como resultado, los procedimientos END y la instrumentación asociada a ellos se han desa-rrollado a lo largo de los últimos años gracias al incremento del número de investigaciones en esta área y a los avances tecnológicos en el área de sensores y transductores de ultrasonido.
Una de las tecnologías utilizadas para la generación de ultrasonido son los transductores acústicos electromagnéticos. Este es un dispositivo que permite generar y detectar ondas acús-ticas en metales, con la ventaja de que no requiere de contacto con la superficie del elemento a inspeccionar y de la utilización del gel de acoplamiento como en el caso de los transductores piezoeléctricos.
Justificación
co-mo científicas. Este trabajo desarrolla por primera vez, en el Laboratorio de Evaluación No Destructiva Electromagnética (LENDE), línea de investigación de electromagnetismo apli-cado, un transductor acústico electromagnético para la medición de espesores en placas de aluminio.
Objetivos
El presente trabajo de tesis presenta un sistema de medición para un transductor acústico electromagnético, que permite detectar el espesor en placas de Aluminio. El objetivo general
de este trabajo es:Desarrollar un transductor acústico electromagnético para medir
espe-sores de placas de Aluminio.
Para darle cumplimiento al objetivo general se plantearon los siguientes objetivos especí-ficos:
1. Diseñar el cabezal de excitación-detección EMAT.
2. Implementar el sistema de excitación-detección del transductor.
3. Simular el funcionamiento del EMAT
4. Realizar mediciones de espesores en placas de aluminio.
Estructura de la tesis
La tesis está estructurada en resumen, justificación, introducción, cuatro capítulos, conclu-siones y trabajo a futuro. El primer capítulo hace referencia a los fundamentos básicos de un transductor acústico electromagnético introduciendo al lector en la temática y presentando una síntesis de las investigaciones acerca de los EMATs. El segundo capítulo está relacionado con el primer y segundo objetivo específico, presenta el diseño del cabezal y de sus componentes además de las partes implementadas del sistema de medición propuesto y la descripción de cada etapa. El capítulo tres le da cumplimiento al tercer objetivo específico, por medio del cual se conoce si el cabezal EMAT genera la onda acústica a partir de los componentes pro-puestos. El capítulo cuatro está en correspondencia con el último y más importante objetivo específico de este trabajo. A través de los resultados obtenidos en este capítulo se demuestra la aplicabilidad del sistema de medición como un método de evaluación no destructiva. En este capítulo se demuestra que el tiempo de relajación tnes diferente para cada espesor de las
placas de aluminio analizadas y por medio del parámetro△tn obtenido se puede realizar el
Capítulo 1
Estado del Arte y Revisión Bibliográfica
1.1. La evaluación no destructiva de materiales por
ultraso-nido
La necesidad de una detección temprana de los defectos en los componentes críticos em-pleados en la industria del petroleo y gas, la generación de energía, y la aeroespacial, es de vital importancia no solo para evitar las fallas de dichos componentes si no también con la finalidad de alargar la vida útil de los mismos. Es fácil de entender que una falla de cualquier componente utilizado en una de las aplicaciones mencionadas anteriormente no solo causa graves daños económicos, si no también puede provocar pérdidas fatales de seres humanos. La capacidad para detectar y localizar el tamaño de un defecto en los componentes permite tomar acciones para garantizar la seguridad de su funcionamiento y la estimación del tiempo de vida, reduciendo muchas veces los costos de mantenimiento y el reemplazo innecesario de partes y/o componentes estructurales.
implica que los transductores piezoeléctricos no son convenientes en una serie de situaciones como por ejemplo, mediciones a altas temperaturas o para el análisis de muestras en movi-miento [1, 3, 4]. Además, la desventaja más importante radica en que la onda elástica no solo se propaga en el material bajo prueba, también en el transductor y el gel de acoplamiento. Esto supone una gran desventaja cuando se requiere hacer mediciones ultrasónicas precisas o cuando se requiere hacer estudios de las propiedaes elásticas e inelásticas de los materiales[5]. El transductor piezoeléctrico recibe tanto los ecos reflejados dentro del material como aque-llos que surjen de las interfaces del sistema transductor - material. Está demostrado que el transductor piezoeléctrico distorsiona las señales reflejadas [5].
La generación de ondas ultrasónicas por métodos sin contacto permiten obtener resultados superiores para la medición precisa de transitorios temporales y para realizar mediciones de atenuación de la onda acústica en el material. Para este tipo de casos se utilizan tecnologías basadas en láser para la generación de la onda ultrasónica, con transductores acoplados por el aire o transductores acústicos electromagnéticos (EMATs) [2, 5, 6, 7].
1.2. El EMAT
Un EMAT es un dispositivo que permite generar y detectar ondas ultrasónicas en metales. En principio, este dispositivo consiste en un imán permanente o un electroimán para garan-tizar un campo magnético estático y una bobina plana que al ser excitada induce corrientes variantes en el tiempo en la superficie del material. La generación y la detección de las on-das ultrasónicas se obtiene a través de una interacción entre los campos electromagnéticos y el campo elástico en la superficie del material bajo prueba. El EMAT transfiere la energía electromagnética en energía mecánica, y viceversa. Esto ocurre estando el EMAT separado de la superficie del material en unos pocos milímetros. La geometría del EMAT puede selec-cionarse para detectar determinados modos de ondas elásticas en dependencia del mecanismo de acoplamiento empleado. Los modos de acoplamiento pueden ser por fuerza de Lorentz, por la fuerza magnetostrictiva o ambos, dependiendo si se está inspeccionando un metal no ferromagnético o ferromagnético. Con los EMAT se pueden lograr varios modos de propaga-ción de ondas, lo que puede explotarse para satisfacer un amplio rango de demandas. Esta es precisamente una de las principales ventajas del EMAT sobre los otros métodos de generación de ondas ultrasónicas sin contacto.
1.3. Historia del desarrollo del EMAT
que más tarde se conoció como la fuerza de Lorentz en las ecuaciones del electromagnetismo [8], mientras que Joule ya había reportado en 1847 sobre el efecto magnetostrictivo [9]. Sin embargo, sólo un siglo más tarde, con los avances científicos y tecnológicos, se propusieron los primeros EMATs para fines de evaluación no destructiva de materiales. La generación de la onda acústica con EMATs se produce cuando un campo magnético estático, una corriente variante en el tiempo y un objeto de metal se encuentran próximos entre sí.
Un transductor acústico electromagnético es un dispositivo para la generación y recepción de ultrasonido utilizando mecanismos electromagnéticos que no requiere de medio de acopla-miento alguno. El EMAT es utilizado como un método de ensayos no destructivos generando la onda acústica directamente dentro del material de prueba. Este transductor es ideal para generar diferentes tipos de ondas: horizontales, transversales, superficiales y tipo Lamb. Los EMATs se pueden utilizar para la medición de espesores, la detección de defectos, la caracte-rización de las propiedades del material, entre otros. Según las necesidades de aplicación, los EMATs se excitan con una señal de onda continua, un pulso o una ráfaga.
El inicio de los estudios del EMAT fue dado cuando se analizó el comportamiento de las heliconias (ondas electromagnéticas de baja frecuencia) por Grimes y Buchsbaum en los años sesenta del siglo pasado [10]. Después de este trabajo, Gaerttner demostró la generación de ultrasonido debido a fuerzas magnéticas [11]. En 1973, Dobbs inició una investigación sobre las ondas ultrasónicas generadas por mecanismos electromagnéticos. Llegó a la conclusión de que las fuerzas eran debidas al efecto de Lorentz y propuso que este fenómeno podría ser útil para fines de ensayos no destructivos de materiales [12].
En el mismo año (1973), Thompson [13] describió la generación de ondas Rayleigh y Lamb en placas de metal, utilizando una configuración del EMAT con una bobina de tipo meandro. Este autor presentó un modelo analítico que incluye el mecanismo por fuerza de Lorentz y estudió la dependencia de la separación entre el transductor y la superficie del material en la señal generada. Más tarde, Thompson [14] estudió el mecanismo de magnetos-tricción y verificó la eficiencia de este mecanismo en diferentes materiales ferromagnéticos. En particular, estudió la dependencia de la amplitud de la señal con el campo magnético aplicado, encontrando que la magnetostricción es dominante con respecto al mecanismo por fuerza de Lorentz y por fuerza de Magnetización cuando los campos magnéticos son bajos y el campo estático se encuentra paralelo a la superficie del material ferromagnético. En 1978 , Thompson [15] presentó las ecuaciones que rigen el funcionamiento del EMAT, incluyen-do un tercer mecanismo de transducción, la fuerza de magnetización, que se demostró ser de menor importancia en comparación con los otros dos mecanismos. Otro logro importante de Thompson junto con Vasile en esos años fue la propuesta de un nuevo tipo de EMAT : el EMAT con imanes permanentes periódicos [16].
simulaciones FE del mecanismo de fuerza de Lorentz para mostrar que la orientación del campo magnético estático puede ser elegido de tal manera que esta fuerza se maximice, para mejorar la amplitud de la señal [17].
Otro avance reciente es el modelado de la bobina del EMAT. Shapoorabadi y colabora-dores [18] en la Universidad de Toronto fueron los primeros en modelar el efecto pelicular (skin depth) en una bobina, incluyendo este efecto en un modelo por elementos finitos. En trabajos previos a este se suponía una distribución uniforme de la densidad de corriente en la sección transversal de la bobina, lo que descuida la tendencia de la corriente a concentrarse en la superficie del conductor. Estos autores demostraron que el efecto pelicular no es un fe-nómeno despreciable y que es una de las causas principales de las grandes diferencias entre algunos modelos ya propuestos y los datos experimentales [19]. Esta aportación fué validada experimentalmente de una manera cuantitativa por un modelo de elemento finito unicamente para el mecanismo de fuerza de Lorentz [20].
1.4. Operación básica del EMAT
Un EMAT está compuesto principalmente por una bobina plana alimentada con una co-rriente alterna y un imán o electroimán que proporciona un campo magnético estático. Cuando el transductor está cerca de una muestra (material conductor), se inducen corrientes de remo-lino alternas con una densidad de corrienteJ˜e. La interacción deJ˜e con la densidad de flujo
magnético ˜Bque proporciona el imán da como resultado una fuerza magnética también alterna
[image:21.595.166.453.485.710.2]sobre las cargas de la muestra, vea la figura 1.1. De acuerdo a la ecuación de Lorentz:
˜F=J˜eטB (1.1)
Debido a esta fuerza alterna resultante se generan ondas acústicas que viajan en el mate-rial. Esta fuerza hace que la generación de ondas ultrasónicas en el sólido pueda ser explotado para su aplicación en la evaluación no destructiva electromagnética de estructuras metálicas.
Desde el punto de vista microscópico, el campo eléctricoEinducido por la corriente de
con-ducción ejerce una fuerza de Coulomb−eEen los electrones de la muestra y los acelera a una velocidad media−eEτ/m. En presencia de una densidad de flujo magnéticoB. Los electrones
experimentan la fuerza de Lorentz eve×B, siendo e la carga del electrón y ve su velocidad
media. Para oscilaciones armónicas mucho más lentas que la frecuencia media de colisión en-tre el electrón y el ión 1/τ, la fuerza inercial de los electrones puede despreciarse y la ecuación de movimiento se reduce a:
ne(mve)/τ =−nee(E+ve×B) (1.2)
donde ne es la densidad de los electrones y m es la masa del electrón. Los electrones ceden
parte de su cantidad de movimiento lineal a los iones del material debido a las colisiones, y la fuerza que actúa sobre los iones se puede escribir como:
F=NZe(E+vi×B) +ne(mve)/τ (1.3)
donde N , Ze, yvi son la densidad , la carga , y la velocidad de los iones, respectivamente.
Utilizando la ecuación (1.2) en (1.3) se puede demostrar que [21]:
F=−neeve×B (1.4)
donde NZe=nee y que la velocidad de los iones es insignificante en comparación con la
de los electrones. Esto reduce a la ecuación 1.3 al término −neeve , siendo este término la
densidad de corrientes de remolino.
La fuerza de Lorentz tiene efecto en cualquier metal conductor. Si la muestra es ferro-magnética existe otro mecanismo que contribuye a la generación de las ondas elásticas: la magnetostricción [21]. Este mecanismo no se presenta en este trabajo porque está fuera del alcance del mismo.
1.5. Ventajas y limitaciones de los EMATs
embargo, este pequeño espacio es suficiente para dar una gran ventaja sobre los transductores piezoeléctricos en algunas aplicaciones como son pruebas de objetos a altas temperaturas y cuando las muestras están en movimiento. El EMAT no requiere contacto ni uso de algún líquido como medio de acoplamiento lo que simplifica la operación y minimiza la necesidad de preparación de la superficie. La geometría de la bobina y del imán, así como su posición permite la excitación y detección de patrones de ondas que son difíciles de generar por otros métodos. Los EMATs se han utilizado para generar y detectar ondas longitudinales, transver-sales o de corte, horizontales, etc.
La relación señal a ruido S/N suele ser pobre si el transductor no está bien diseñado. Otro problema importante de los EMATs es que su rendimiento puede variar con las propiedades electromagnéticas de la muestra: un transductor funcionando perfectamente en un metal pue-de entregar señales con una menor relación S/N cuando se utiliza en otro material. Apue-demás, los principios en que se basan los EMATs para generar y detectar ondas ultrasónicas implica que solo se puede lograr en materiales conductores tanto ferromagnéticos como no ferromag-néticos [5].
El método EMAR (Electromagnetic Acoustic Resonance) es una combinación del EMAT y mediciones de resonancia. Es el mejor método de mecanismo de amplificación para me-diciones de velocidades precisas y de atenuación. En resonancia, un gran número de señales recibidas se superponen de manera coherente, dando una mayor relación S/N y respuesta es-pectral aguda. La resonancia es ideal para las pruebas de ultrasonido pero solo puede ser utilizada en transductores sin contacto. Los transductores de contacto absorben una gran parte de la energía de la onda elástica y alteran los ángulos de fase de las señales en cada reflexión. Por otra parte, la técnica de contacto presenta deficiencias para las mediciones de atenuación. La absorción de energía en los transductores de contacto provoca grandes pérdidas y la ate-nuación de la onda en el material. La separación es imposible. Sin embargo, el EMAT es libre de estos problemas. El EMAT y la técnica de resonancia es una buena combinación para la caracterización de los materiales [5].
1.6. Clasificación de los EMATs
Figura 1.2: EMAT que genera ondas transversales en el material de prueba. Las lineas de flujo del campo magnético estático son normales a la muestra.
viajan en la dirección normal a la superficie de la muestra. Sin embargo, cuando el transduc-tor se emplea en un material ferromagnético, la situación cambia: en este caso la fuerza de magnetización tiende a anular la componente normal de la fuerza de Lorentz [22, 23, 24], por lo que la generación de ondas longitudinales es extremadamente ineficiente.
Un EMAT como el de la Figura 1.3 genera ondas longitudinales, ya que las líneas de flujo del campo magnético estático son tangenciales a la superficie de la muestra [6, 7]. Se generan ondas longitudinales si el área sensible de la bobina es normal al campo magnético estático y paralela a la superficie de la muestra.
Los EMATs con Imanes Permanentes Periódicos (PPM, por sus siglas en inglés)[6, 16] están diseñados con una serie de imanes con sus polaridades invertidas, todos normales a la superficie de la muestra. Entre la matriz y la muestra, la corriente de excitación circula por una bobina cuyos devanados quedan rectos y paralelos entre sí. De esta manera se inducen fuerzas paralelas a la superficie, alternando con una periodicidad igual al doble del ancho de los imanes. Las ondas resultantes son transversales. La longitud de onda está determinada por el ancho de los imanes de la matriz, por lo que para longitudes de onda pequeñas se requieren imanes delgados. Desafortunadamente, los imanes cuyo ancho es inferior a 1mm suelen generar pequeños campos magnéticos, por lo que, en el caso de las ondas transversales, el transductor funciona eficientemente solo por debajo de una frecuencia límite determinada, aproximadamente 1 MHz.
ferro-Figura 1.3: EMAT que genera ondas longitudinales en la muestra. Las líneas del flujo magné-tico estámagné-tico son paralelas a la muestra.
magnéticos1 que basan su funcionamiento en la fuerza de Magnetostricción [25, 43], donde
se tiene una bobina de tipo serpenteo que se coloca en un campo magnético tangencial. Da-do que el efecto por Fuerza de Lorentz no es el principio de transducción más importante, el transductor funciona incluso cuando el campo magnético y los alambres de la bobina son paralelos. Esto se debe a que el campo magnético estático y el campo variante en el tiempo, debido a la corriente de conducción, son perpendiculares entre sí causando solo un cambio en la dirección del campo magnético total y no en su magnitud.
Los EMATs son capaces de generar y detectar ondas elásticas en una sólido por medio de tres fenómenos electromagnéticos diferentes [5, 7, 26]. El mecanismo por fuerza de Lorentz actúa sobre cualquier material conductor, tanto ferromagnético como no ferromagnético. Esta fuerza surge debido a la interacción de la densidad de flujo magnético producida por el imán con las corrientes de remolino en el sólido que son inducidas por la corriente alterna a través de la bobina del transductor. Por otro lado, los dos mecanismos restantes, el mecanismo por fuerza de Magnetización y por Magnetostricción únicamente operan en materiales ferromag-néticos. En este trabajo se desarrolla un EMAT para materiales paramagnéticos conductores, por lo que únicamente se presentará con mayor detenimiento el mecanismo de transducción por fuerza de Lorentz.
1Los materiales ferromagnéticos son sustancias que al aplicarles un campo magnético externo, sus dominios
1.7. Mecanismo de generación de la onda acústica por
fuer-za de Lorentz
La generación de las ondas elásticas en los EMATs pueden describirse por las ecuaciones de Maxwell [5, 22, 27]:
∇×E=−∂B
∂t, (1.5)
∇×H=J+∂D
∂t, (1.6)
y
∇·B=0, (1.7)
∇·D=ρq, (1.8)
y las relaciones constitutivas:
Je=σE, (1.9)
B=µ0(H+M), (1.10)
donde E y D son la intensidad de campo eléctrico y la densidad del campo eléctrico,
res-pectivamente;J es la densidad de corriente, B yH son la densidad de flujo magnético y la
intensidad de campo magnético,Mes la magnetización, µ0y σ es la permeabilidad
magné-tica en el espacio libre y la conductividad eléctrica, yρq es la densidad de carga. El término
∂D
∂t conocido como corrientes de desplazamiento, no se considera en nuestro caso, ya que su
contribución es despreciable para frecuencias inferiores a 100 MHz. La solución a este con-junto de ecuaciones se puede utilizar para calcular las fuerzas dinámicas~f que actúan sobre el material:
F=fL+fM (1.11)
donde fL y fM son la fuerza de Lorentz y la fuerza de Magnetización, respectivamente; se
definen como:
F=Je×B (1.12)
fM=∇H·µ0M (1.13)
donde Je es la densidad de las corrientes de remolino inducidas en la muestra y ∇H es el
gradiente del campo magnético. Este conjunto de interacciones se consideran como una fuerza externa en un medio isotrópico elástico continuo, para realizar el cálculo del campo acústico [18, 28]:
ˆ
µ∇×∇×u−(λˆ +2 ˆµ)∇∇·u+ρ∂
2u
donde ˆµy ˆλ son constantes2, u es el vector de desplazamiento,ρ es la densidad de masa del material. La solución de las ecuaciones (1.5) a (1.10) permite el cálculo de la fuerza externa en la ecuación (1.14) utilizando las ecuaciones (1.11) a (1.13).
1.7.1. La fuerza de Lorentz
La densidad de corriente dinámicaJen la bobina, induce una densidad de corrientes de re-molinoJeen el material conductor, circulando en sentido contrario a la I original, según la ley de inducción de Faraday. La corriente inducida se encuentra principalmente en la superficie de la muestra, que puede calcularse por el parámetro llamado “profundidad de penetración”. Para
una onda electromagnética plana y sinusoidal de frecuenciaf, que incide sobre un material
homogéneo con conductividadσ y permeabilidadµ0µr,δ es definida como [27]:
δ =p 1
πfσ µ0µr
(1.15)
Las corrientes de remolino tienen asociado una densidad de flujo magnéticoBe que interactúa
con la densidad de flujo magnético estático B del imán permanente, dando como resultado
una densidad de flujo magnético resultante :
B=B+Be (1.16)
El total de la fuerza de Lorentz es la siguiente:
fL=f′L+f′′L=Je×(B+Be) (1.17)
Si la corriente generada es sinusoidal, con frecuenciaf (o frecuencia angularω =2πf), tanto
las corrientes de remolino como la densidad de flujo magnético dinámico serán armónicos,
oscilando a la misma frecuencia, mientras que el campo magnético estáticoBproducido por
el imán se mantiene constante:
JeB∼sen(wt) (1.18)
B=constante (1.19)
La ecuación 1.17 implica que la contribución a la fuerza de Lorentz resultante debido al imán
permanente oscila con la misma frecuenciaf que la corriente de conducción, mientras que la
componente debido al campo auto-inducido tiene una frecuencia doble, 2f:
f′
L∼sen(ωt) (1.20)
f′′
L∼sen(ωt)·sen(ωt)∼cos(2ωt) (1.21)
En los casos más prácticos, la densidad de flujo magnético estático es mucho más grande que la densidad de flujo dinámica. Sin embargo, si la corriente de conducción es extremadamente grande (más de 100 A), el transductor puede funcionar sin la ayuda de un imán permanente o un electroimán [5, 29, 30].
1.7.2. El mecanismo de recepción
Los mismos principios físicos que permiten a los EMATs generar ondas elásticas pueden ser explotados para obtener una señal eléctrica a partir de una onda mecánica que viaja cerca del transductor. Una variación del desplazamiento en el tiempo en un medio conductor, en presencia de una densidad de flujo magnético estático ¯Bda como resultado un campo eléctrico inducido:
E∼ ∂u
∂t ×B¯ (1.22)
Este campo produce un lazo de corriente en el material conductor y el campo magnético variable resultante es inducido en la bobina del transductor, por lo que se obtiene un voltaje inducido en la bobina proporcional a la velocidad de la onda [5].
1.8. Ondas acústicas para las propiedades ultrasónicas de
los materiales
Los tipos de ondas que pueden ser generados en los materiales son de dos formas: las ondas transversales en el cual el desplazamiento es perpendicular a la dirección en que viaja la onda, y las longitudinales en las cuales el desplazamiento en el material es a lo largo de la dirección en que viaja la onda.
La amplitud de la onda es una función del tiempo y la posición, y puede ser representada de muchas formas equivalentes: con una función sinusoidal, con un coseno, o como una ecuación diferencial de segundo orden en la cual la aceleración es proporcional al desplazamiento. Una onda que se propaga dentro de un material, para este caso unidimensional tiene la forma general:
y(x,t) =A·p(kx+2πvt) (1.23)
donde y es el desplazamiento, A es la amplitud de la onda, p es una función periódica, x es la distancia a lo largo de la dirección de propagación, t es el tiempo, v es la frecuencia de la onda, y k es el vector de onda, (el recíproco de la longitud de ondaλ), el cual describe que
En el caso más simple, p es una función sinusoidal:
y(x,t) =A·cos(kx+2πvt) (1.24)
siendo las primeras y segundas derivadas en el tiempo:
∂y
∂t =−2πA·sin(kx+2πvt) (1.25)
∂2y
∂t2 =−(2πv) 2A
·cos(kx+2πvt) (1.26)
y las derivadas con respecto a la distancia:
∂y
∂x=−kA·sin(kx+2πvt) (1.27)
∂2y
∂x2 =−k2A·cos(kx+2πvt) (1.28)
A partir de las ecuaciones 1.24 a 1.28 se deduce que:
∂2y
∂x2 =
k2
(2πv)2
∂2y
∂t2 (1.29)
y con k=2π/λ yfλ =Vse obtiene que:
∂2y ∂x2 =
1 V2
∂2y
∂t2 (1.30)
dondeVes la velocidad. La ecuación 1.30 es la que se conoce como la ecuación de la onda,
con movimiento armónico simple.
1.8.1. Longitud de onda y frecuencia
Aunque la velocidadVde las ondas ultrasónicas en los materiales no cambia mucho con
respecto a la frecuencia, la longitud de ondaλ es inversamente proporcional a la frecuencia
f,
V=fλ (1.31)
1.8.1.1. La onda ultrasónica
Una vez que las ecuaciones electromagnéticas se resolvieron para cierta geometría y con determinados parámetros físicos, y la fuerza del cuerpo dinámico se calculó, es necesario calcular la fuerza que se aplica en el aluminio para predecir el campo ultrasónico generado por el transductor. La ecuación que rige, en el caso de un medio elástico, isotrópico es la ecuación de Navier [1, 28]. Generalmente, la solución de esta ecuación requiere el uso de métodos numéricos. Sin embargo, algunos métodos permiten soluciones aproximadas para casos especiales. Un método utilizado por varios autores se aprovecha del hecho de que todas las fuerzas dinámicas generadas por los EMATs se encuentran en una pequeña porción de la muestra, es decir, dentro de una profundidad comparable a la profundidad de penetración [7, 28, 31]. Dado que la profundidad de penetración es generalmente mucho menor que la
longitud de onda (por ejemplo, en el aluminio para las ondas de corte (SH), conf =2 MHz,
δ ∼=3,35 nm mientras que λ ∼=1,50 mm), la fuerza generada en la muestra permite que se generen las ondas en la superficie. Este método permite la aplicación de soluciones clásicas del campo ultrasónico, tal como el modelo “cuerpo-resorte”[32]. Hay que señalar que lo descrito descuida cualquier acoplamiento mutuo, es decir, el campo magnético generado por la onda acústica inducida no se tiene en cuenta durante el proceso de generación de la onda.
1.8.2. Relación entre las propiedades mecánicas y la propagación de
on-das
Una onda es una respuesta (desplazamiento) de una material a un estrés (una carga pe-riódica), donde el módulo elástico está relacionado con la velocidad de propagación de las ondas. En el caso de las ondas transversales, el desplazamiento es ortogonal a la dirección de propagación de la onda. En sólidos, estas se conocen como ondas de corte.
Consideramos una onda transversal como se muestra en la Figura 1.4. La deformación
transversale⊥ en una sección elemental del material por donde pasa una onda transversal se
escribe como:
e⊥= ∂a
∂x (1.32)
El módulo elástico se define como:
G= σ
s
⊥
e⊥ (1.33)
La diferenciación de esta ecuación da
∂ σ⊥s
∂x =G
∂e⊥
∂x =G
∂2a
∂x2, (1.34)
y el estrésσ⊥s es fuerza/área, por lo tanto,∂ σ⊥s
Figura 1.4: Representación de una onda transversal pasando a lo largo de la dirección-x. El desplazamiento perpendicular de la dirección que viaja es a(x).
por el volumen
∂ σ⊥s
∂x =ρ
∂2a
∂t2 (1.35)
Por lo tanto, haciendo referencia a la ecuación 1.30 , la velocidad de las ondas transversales es
Vs=
s
G
ρ (1.36)
dondeρes la densidad de masa del material de prueba expresada en Kg/m3y G es el módulo
de elasticidad expresado en GPa. Por lo que la velocidad de una vibración mecánica transver-sal depende sólo del módulo de corte elástico y de la densidad del material. Esto significa que la medición de la velocidad de la onda se puede utilizar para determinar el módulo elástico suponiendo que se conoce la densidad [1].
1.9. Pasos para la construcción de un EMAT
1.9.1. La bobina de excitación
geo-metría se utiliza por lo general para los EMATs de ondas volumétricas (esto quiere decir que la onda viaja dentro del material de prueba de forma perpendicular). La segunda geometría es para EMATs de ondas superficiales como: las ondas de corte, las ondas tipo Rayleigh, las ondas tipos Lamb, etc [5].
1.9.2. Los imanes permanentes
Muchas configuraciones de EMATs utilizan imanes permanentes porque estos pueden aplicar campos magnéticos suficientemente altos con estructuras compactas sin tener que uti-lizar una fuente de alimentación. Las desventajas de utiuti-lizar imanes permanentes es la intensi-dad de campo no controlada y que son intolerantes a altas temperaturas debido a su
temperatu-ra de Curie3bajas. La mayoría de EMATs utilizan imanes de NdFeB sinterizados. Estos
ima-nes poseen la mayor remanencia Br(∼1,4T)y el mayor producto[BH]max(∼47 MGOe)entre
los imanes disponibles comercialmente. Debido a que los imanes permanentes de NdFeB tienen una temperatura de Curie baja (80°C), no se pueden utilizar en aplicaciones a altas temperaturas. Por lo tanto, las aplicaciones a alta temperatura necesitan de sistemas de enfria-miento. Una alternativa a los imanes de NdFeB es utilizar imanes de SmCo, ya que tienen una temperatura de Curie mayor (entre 250 y 300 C) pero con un producto[BH]max<30 MGOe.
Estos imanes permanentes son conductores y en ellos se evidencia el fenómeno magneto-elástico: la magnetostricción. La bobina del EMAT provoca campos dinámicos no sólo en la muestra, sino también en los imanes, y se pueden producir ondas acústicas de gran amplitud dentro de los imanes por las interacciones entre el campo magnético o la magnetostricción dentro de los imanes y los campos dinámicos provocados por la bobina. Esto perturba las señales procedentes de la muestra. Al arañar la superficie de los imanes se puede reducir es-ta influencia de manera apreciable, ya que las ondas acústicas en los imanes se encuentran dispersas al azar en las reflexiones y se anulan rápidamente.
También se puede utilizar un electroimán, que puede controlar la fuerza del campo mag-nético de polarización y puede utilizarse a temperaturas elevadas con aislante térmico y/o un sistema de refrigeración. Existe un campo mucho mayor con los electroimanes, pero esto implica que las bobinas se calienten. El pulso de corriente, en la bobina del electro imán al sincronizarse a la corriente de la bobina de excitación EMAT, puede ser utilizado para mi-nimizar el calentamiento Joule. Después de todo, los EMATs con electroimanes ocupan un mayor espacio que aquellos con imanes permanentes [5].
3La temperatura de Curie de un material ferromagnético es aquella en la que el material pasa a un estado
1.9.3. El acoplamiento de Impedancia
1.9.3.1. Redes de Acoplamiento
Normalmente existen una gran diferencia entre la impedancia del EMAT y la impedancia del equipo con el que se excita la bobina del EMAT por lo que se requiere entonces maxi-mizar la transferencia de energía en la transducción. Probablemente la red de acoplamiento LC de mayor utilidad para los transductores es la red tipo L. Esta red está conformada por dos elementos reactivos(Xa) y (Xb). Esto requiere que se conozca la impedancia tanto del
transductor asi como también la impedancia de salida del equipo de excitación.
La impedancia del transductor debe ser medida o estimada. En ocasiones se debe tener cuidado cuando se utiliza un medidor de impedancia para medir el transductor. Las lecturas pueden verse afectadas por la carga acústica del transductor, así como por el cable conectado a la misma. Si el transductor está conectado a una muestra durante la medición, en la muestra puede haber efectos resonantes que son altamente sensibles a la frecuencia y echan a perder la fiabilidad de las mediciones. La forma más usual de representar las impedancias en esta red es utilizando la forma en serie, vea Figura 1.5.
Figura 1.5: Red de acoplamiento en serie.
La impedancia de salida de la fuente es, por lo tanto, dada por:
Zi=Ri+jXi (1.37)
y la impedancia de la carga (transductor) por:
Zo=Ro+jXo (1.38)
donde j= (−1)1/2
Las ecuaciones que se utilizan para la obtención de las impedancias correspondientes son:
Xa= − R
2 i +X2i
QRi+Xi (1.39)
Figura 1.6: Conversión de la forma paralela a serie.
Donde Q está definida por:
Q=±
v u u u u u t Ri
1+Xi Ri
2
Ro −1
(1.41)
Si la impedancia del transductor se da en forma paralela, se puede convertir a la forma serie utilizando las ecuaciones (1.42)y (1.43). En la Figura 1.6 se representa la conversión de una impedancia en paralelo a serie.
Rs=Rp 1
1+XRpp2
(1.42)
Xs=Xp
R
p Xp
2
1+XRpp2
(1.43)
Las conversiones de serie a paralelo son dadas por las ecuaciones (1.44) y (1.45), vea la Figura 1.6.
Rp=Rs
" 1+ X s Rs 2# (1.44)
Xp=Xs
1+Xs Rs 2 X s Rs 2 (1.45)
Se debe tener en cuenta que este formalismo asume que el elemento de derivación del circuito de acoplamiento tipo “L” es en paralelo con el transmisor. Si uno intercambia los valores de
Zi por los de Zo y viceversa, se obtiene otra solución en la que el elemento de derivación
tenga características no deseadas por ejemplo que ésta se comporte como un filtro pasa alto [33].
1.9.3.2. Relación de voltaje de subida
Siempre es interesante conocer la tensión de subida o de bajada de la salida del equipo de excitación al transductor. Si la red de acoplamiento está diseñada correctamente, la potencia de salida del equipo de excitación con Z0=50Ωesta dada por:
Potencia= E
2 salida
50 (1.46)
La potencia aplicada al transductor está dada por:
Potencia=E
2
transductorRo [Zo]2
(1.47)
donde Esalida y Etransductor se refieren a los niveles de voltaje rms en la salida del equipo de
excitación y en los contactos del transductor, respectivamente. Cuando la ecuación (1.46) y (1.47) son equivalentes, la solución para la relación entre el transductor y el voltaje del transmisor (voltaje de subida) está dado por:
Etransductor
Esalida =
|Zo|
√50R
o (1.48)
donde |Zo| es la magnitud de la impedancia compleja del transductor [33].
1.9.3.3. Transformadores
Los transformadores convierten la fuente de potencia con un nivel de voltaje y corriente a otro nivel de voltaje y corriente. Para lograr la máxima transferencia de potencia desde la fuente a la carga (transductor), la impedancia de la carga debe coincidir con la impedancia ca-racterística del equipo de excitación. La impedancia de carga se transforma como el cuadrado de la relación tensión-transformación. La relación de la transformación de tensión se conoce
como N·N y proviene del número de vueltas en el devanado primario dividido por el número
de vueltas en el devanado secundario.
Los transformadores pueden configurarse en de bajada o de subida. Los términos de subida y bajada se refieren a la capacidad del transformador para cambiar la tensión o la corriente
que circula a través de él. En primera aproximación, la potencia V×I a la entrada de un
Figura 1.7: Sistema Experimental EMAT tomado de [34].
Se debe tomar en cuenta que el transformador como acoplador de impedancia sólo consi-dera la parte real de la impedancia. Si en la carga (transductor) existe una gran componente reactiva, el transformador no las eliminará. De hecho, un transformador puede aumentar la parte reactiva de la impedancia de carga. Esto da como resultado un componente reactivo en potencia que es reflejado al equipo de excitación del EMAT [37].
La fórmula para calcular esta transformación es:
Vs=Ns×Vp
Np (1.49)
1.10. Instrumentación utilizada con EMATs
La instrumentación utilizada en la mayoría de los experimentos reportados en la literatura de los EMAT se muestra en la Figura 1.7. El EMAT se excita con un generador de pulsos, capaz de suministrar ráfagas con voltajes de alrededor 100 Vpp y constituye el componente clave para la función del EMAT [34]. Pasa por una etapa de amplificación. Este amplificador de potencia debe ser capaz de entregar la potencia requerida, que se sintoniza a la frecuencia central aproximada de la señal transmitida. La señal con la que se excita el EMAT se conecta a un canal de un osciloscopio de almacenamiento digital. La mayoría de los experimentos reportados realizan las pruebas utilizando dos EMATs: el transmisor y el receptor. El EMAT receptor se conecta a una etapa de pre-amplificación y este a su vez a otro canal del osci-loscopio. El osciloscopio se activa a partir de una señal de temporización entregada por el generador de funciones que se sincroniza con la forma de la onda transmitida.
Figura 1.8: Sistema experimental EMAT tomado de [35].
Capítulo 2
Sistema Experimental
2.1. Introducción
Este capítulo está en correspondencia con los dos primeros objetivos específicos de este trabajo: diseñar y construir el cabezal de excitación y detección, e implementar el sistema de excitación y detección del EMAT. Se explica el funcionamiento de cada una de las etapas del sistema y los dispositivos que conforman el sistema. Además, se realiza la caracterización del control remoto del generador de radiofrecuencia (RF) modelo CLF5000/PLL. Esta caracteri-zación fue necesaria ya que se contactó a la compañía en México para solicitar información técnica sobre el generador y sólo proporcionó el manual de usuario donde sólo aparece una descripción muy general del mismo [36].
2.2. El cabezal de excitación-detección EMAT
Figura 2.1: Esquema del cabezal de excitación EMAT: 1) Placa de acero, 2) y 3) Imanes per-manentes de NdFeB, 4) Bobina de excitación para la generación de las corrientes de remolino en la placa de aluminio y 5) Muestra de aluminio.
2.2.1. Principio físico de la configuración del EMAT propuesto
el tiempo debida a la fuerza de Lorentz, genera un campo magnético variante en el tiempo donde las líneas del campo atraviesan la bobina y por lo tanto se induce una fem en la bobina que está asociada con la onda acústica generada en el material, vea figura 2.2f).
a) b)
c) d)
e) f)
2.2.2. La bobina de excitación del EMAT
Como se mencionó en el capitulo 1 de esta tesis, la bobina de excitación es el componente principal del EMAT, ya que la geometría determina el tipo de onda que se genera. La bobina de excitación-detección utilizada en el desarrollo de este trabajo se diseñó y construyó con las dimensiones físicas presentadas en la tabla 2.1 con alambre de cobre calibre 21 (AWG), esto debido a la corriente maxima que soporta el alambre. El alambre de cobre tiene una resistividad específica deρc=1,7×10−8Ω/m. El espacio entre la bobina y el material es de
1 mm. Esta separación se realiza con unas láminas de acrílico como se muestra en el figura 2.1.
Características
Radio Interior 3.22 mm
Radio Exterior 7.63 mm
Espesor de la bobina 0.735 mm
Número de vueltas 12
Diametro del alambre 0.735 mm
Número de capas 1
Resistencia 237 mΩ
Tabla 2.1: Dimensiones físicas de la bobina de excitación y detección .
Los valores de resistencia e inductancia de la bobina se midieron con un puente LCR Agilent 4284A a una frecuencia de 400 kHz. La bobina se encuentra justo debajo de los imanes como se muestra en la Figura 2.1.
La ley de Biot Savart establece que la densidad de flujo magnético B en un punto situado a una distancia z del centro de una espira de radio(R)por la cual circula una corriente(I), se calcula a partir de la ecuación [37]:
B= µ0IR
2
2(z2+R2)32 (T) (2.1)
El valor máximo de la densidad de flujo magnético (B) que se produce en el centro de la bobina excitadora cuando a través de ella circula una corriente de 6 A es de 78 mT.
2.2.3. Los imanes permanentes del EMAT
Los imanes permanentes del transductor acústico electromagnético utilizados en el desa-rrollo de este trabajo se eligieron considerando el tamaño de las muestras a analizar y consi-derando también que la densidad de flujo magnético mayor se concentra en el centro de los imanes. También se tomaron en cuenta las características físicas presentadas en la Tabla 2.2 . Los imanes son de NdFeB de grado 35. Las dimensiones de los imanes son de 25.40 x 25.40 x 12.70 mm.
Características de los imanes
Material NdFeB
Revestimiento Ni-Cu-Ni
Dirección de Magnetización Axial
Peso 62 gr
Br_max 11.7 a 12.1 kG
Temp. Max. de operación 80° C (176° F)
Tabla 2.2: Características físicas de los imanes utilizados en la construcción del EMAT .
2.3. Generador RF para la excitación del EMAT
El generador RF CLF5000/PLL de la marca COMDEL es un amplificador de potencia de baja frecuencia. La fuente de alimentación consiste en fuentes de alimentación de CD, siste-mas de control y los circuitos de control. La señal de radio frecuencia es generada localmente en el controlador del panel frontal de CLF. A partir de este montaje, la señal se divide de cuatro maneras y va a cuatro amplificadores de potencia (AP) LF1250. Las señales de control se obtienen a partir de la señal de salida a medida que pasa a través del monitor al conector de salida de RF. El panel frontal, que es el controlador CLF, permite que el usuario controle la generación de la señal desde el panel frontal o por el conector trasero dependiendo como sea el modo de operación. Supervisa las señales de control como la potencia de salida de RF, sensores de tensión, la señal del monitor y los interruptores de sobrecalentamiento.
El generador RF CLF5000/PLL funciona a una frecuencia central de 400±50 kHz. La
fuente de energía produce la máxima transferencia de potencia a una carga resistiva de 50Ωy está diseñado para soportar grandes desviaciones en la impedancia de carga. Las especifica-ciones eléctricas del Generador se muestran en la tabla 2.3.
Se realizó la caracterización del generador obteniendo la potencia mínima y máxima de salida con una carga de 50Ω, observando en las Figuras 2.3 y 2.4 la respuesta lineal del voltaje
Características
Frecuencia central 400 kHz
Rango de frecuencia ±50 kHz
Potencia de salida nominal 5 kW en 50Ωde carga en todo el rango de frecuencia
Impedancia de salida 50Ω
Tabla 2.3: Especificaciones eléctricas del generador RF CLF5000/PLL.
El generador produce una forma de onda sinusoidal continua, lo que puede convertirse en una desventaja para la excitación del cabezal, ya que la literatura reporta que se deben utilizar rafagas de pulsos para excitar el EMAT. Como puede observarse en la Figura 2.3 el voltaje mínimo para una carga resistiva de 50Ω es de 71 Vp y la corriente mínima es de 1,42 Ap,
estos valores mínimos deben tomarse en cuenta para excitar el cabezal EMAT debido a las características de la bobina de excitación-detección.
Figura 2.3: Voltaje de salida en función de la potencia para ZL=50Ω.
2.3.1. Control remoto por la interfaz analógica
El amplificador RF de COMDEL, tiene un puerto de entrada/salida con un conector DB25 que funciona como una interfaz analógica remota. Los pines correspondientes a las salidas y entradas son los siguientes:
Figura 2.4: Corriente de salida en función de la potencia para ZL=50Ω.
Pines 24 (+) y 11 (-), RFL OUT: salida analógica lineal diferencial de 0-10 V que equivale a 0-5 kW de potencia de salida reflejada.
Pines 23 (+) y 10 (-), DEL PWR OUT: salida analógica lineal diferencial de 0-10 V (DC) que representa 0-5 kW de potencia de salida entregada.
Pines 22 (+) y 9 (-), SETPOINT IN: 0-10 V (DC) de entrada a la carga analógica dife-rencial para una respuesta lineal de 0-5 KW de potencia de salida entregada.
Pines 21 (colector) y 8 (emisor), MAX POWER LIMIT: salida digital con optoaco-plador que representa la condición de salida de potencia entregada por encima de 5.1 kW.
Pines 20 (colector) y 7 (emisor), OVERTEMP: salida digital con optoacoplador que representa la condición de evitar el sobrecalentamiento del generador. La salida de RF puede ser deshabilitado por medio de RF ENABLE IN.
Pines 19 (colector) y 6 (emisor), RF ENABLE OUT: salida digital con optoacoplador que representa que la salida de RF ha sido habilitada via RF ENABLE IN.
Pines 18 (cátodo) y 5 (ánodo), RF ENABLE IN: entrada digital con optoacoplador que habilita la salida de RF.
Pines 17 (ánodo) y 4 (cátodo), REMOTE SELECT: entrada digital con optoacoplador que habilita la operación remota.
Pines 15 (+) y 2 (RET), Aux 15 V (DC) de salida, 50 mA MAX.
Pines 14 y 1, INTERLOCK LOOP: para el control externo del generador AC. La co-rriente de cierre de 24 V (AC) es 350 mA continua (2 A pico).
Figura 2.5: Conector de interfaz analógca para en control remoto del generador RF. Se mues-tran las tres señales utilizadas.
En el control remoto utilizado en este trabajo unicamente se habilitan las entradas de interés, como se muestra en la Figura 2.5. En la figura se representa el puerto DB25 y los pines con los que se realiza el control remoto, activando en primer lugar los pines del REMOTE SELECT para activar el control a distancia. Posteriormente se activó RF ENABLE IN para que se habilite la salida RF del generador, y finalmente se activa el SETPOINT para obtener una respuesta lineal 0-5 KW de potencia entregada mediante un voltaje de entrada de 0-10 Vdc.
En la tabla 2.4 se encuentran los valores con la respuesta lineal del SETPOINT para que el generador RF entregue determinada potencia a su salida.
Voltaje (V) Potencia entregada (W)
0.1 50
1 500
10 5000
Tabla 2.4: Correspondencia lineal del SETPOINT y la potencia entregada a la salida del ge-nerador de RF.
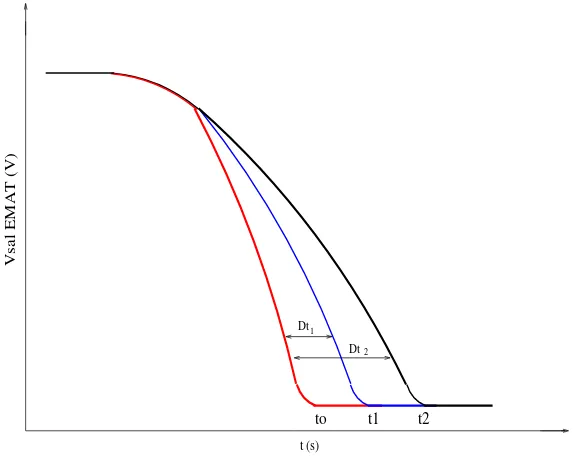
Cuando la salida RF se activa como se observa en la Figura 2.6, transcurre un lapso de
tiempo para que el generador entregue la potencia a su salida tAG. Además existe un tiempo
de estabilización tEGen el que se estabiliza la señal de excitación. De la misma forma cuando
la salida RF se desactiva transcurre un lapso de tiempo tApGen el que la señal se va relajando
Figura 2.6: Señal de salida del generador de RF (Vsal) junto con la señal de control ENABLE
IN RF. Se muestran los tiempos de activación tAG y de estabilización tEG del Generador de
RF.
Figura 2.7: Señal de salida del generador de RF (Vsal) junto con la señal de control ENABLE IN RF. Se muestra el tiempo de apagado tApGdel generador de RF.
En la tabla 2.5 se observan los tiempos de Activación ¯tAG, Estabilización ¯tEGy Apagado
¯tApG del Generador RF obtenidos de 10 mediciones para observar la repetibilidad de estas
t 1 2 3 4 5 6 7 8 9 10 M¯ ±σ (ms)
¯tAG 187 184 187 186 186 185 184 186 187 186 186±2
¯tEG 46 49 46 48 49 48 48 49 49 47 48±2
¯tApG 3 3 2.75 2.5 3 2.8 2.75 3 3 3 2,8±0,2
Tabla 2.5: Valores obtenidos para los tiempo característicos tAG, tEGy tApGdel generador RF.
2.5 2.6 2.7 2.8 2.9
-3 -2 -1 0 1 2 3 V sa l d e l G e n e r a d o r ( V ) t (ms) Carga Resistiva
Figura 2.8: Señal de salida del generador de RF cuando se le conecta una ZL=50Ω.
En la Figura 2.8 se muestra la forma en la que el generador se apaga. Se aprecia en esta fi-gura el tiempo de relajación para que deje de suministrar potencia despues de que se inhabilitó la entrada ENABLE IN RF.
2.4. El sistema de medición
La figura 2.9 muestra el diagrama de bloques del sistema de medición utilizado para las mediciones con el EMAT para detectar cambios de espesor en placas de aluminio. El expe-rimento se realiza fijando el cabezal de excitación sobre la placa de aluminio. La separación entre el cabezal y la superficie del material en el sistema de medición es de 0,1 mm. El área
activa del transductor es de 15,26 mm que corresponde a las dimensiones de la bobina. La
corriente de excitación del EMAT se obtiene del generador de RF (fuente de excitación de la bobina) que se utiliza para suministrar una corriente alterna de 6 A a la bobina de excitación, la cual genera un campo magnético variante en el tiempo.
El generador se excita a la carga con una onda sinusoidal de frecuencia de 400±50 kHz.
potencia que entrega el generador al transductor así como la duración de la señal de excita-ción. El circuito monoestable se construyó con el fin de analizar la parte de interés de la señal EMAT, que se encuentra después de los 3 ms del frente de caída de la señal RF. El circui-to monoestable permite activar con el flanco de caída de la señal externa el temporizador de 3 ms. Con el flanco de caída del temporizador del monoestable esta señal se activa el trigger del osciloscopio para realizar la adquisición de la señal en la parte de interés, que se encuentra en el tiempo de relajación del apagado del generador. El pulso externo del circuito monoes-table es la señal ENABLE IN RF, vea la Figura 2.10. El generador de funciones Tektronix AFG 3022 se utiliza para seleccionar la forma, amplitud, frecuencia y ancho del pulso de la señal ENABLE IN RF y que a su vez es el pulso externo de disparo del circuito monoestable 74LS221.
Figura 2.11: Transformador que reduce el voltaje del generador al cabezal EMAT.
Figura 2.10: Señales de disparo y control de las mediciones con el sistema experimental utili-zado.
El transformador se construyó para reducir el voltaje que entrega el generador RF a la bobina del EMAT. Considerando que la potencia mínima que entrega el generador RF es de 50W. El transformador se compone de un núcleo de ferrita sobre el cual se han enrrollado va-rias espiras de alambre de calibre 14 AWG. La corriente máxima permisible para este calibre es de 15 A. El devanado primario es la que recibe el voltaje del generador, tiene 23 vueltas y el devanado secundario es el que se conecta al EMAT, tiene 2.3 vueltas. La relación de trans-formación entre los devanados primario y secundario es de 10 : 1. La Figura 2.11 muestra el transformador contruido.
La integración del cabezal de excitación-detección del sistema de excitación del cabezal, de la sección electrónica para el cabezal y el osciloscopio Tektronix TDS 3032B para la ad-quisición de la señal EMAT como un todo, forman el sistema de medición EMAT que se utiliza para medir cambios de espesor en placas de Aluminio. En la figura 2.12 se muestran los equipos y los módulos desarrollados que conforman el sistema de Medición.
Figura 2.12: Sistema experimental de medición EMAT.
2.5. Principio de medición
Consideremos que el transductor EMAT se coloca sobre una placa de aluminio de espesor
d con una separación entre el transductor y la superficie del material de prueba menor a 1
mm. Para una excitación de tipo pulsada y sinusoidal se generan ondas ultrasónicas planas y
transversales que se propagan en el material con una longitud de ondaλ. Un pulso de onda
ultrasónica tendrá reflexiones repetidas en ambas superficies de la placa y éstas se recibirán por el transductor EMAT cada vez que alcance la superficie de la onda incidente. En caso que