RESUMEN
En el presente trabajo se muestra el desarrollo de un vehículo de pruebas que será parte
de un sistema de estacionamiento automático mediante visión robótica, el cual permitiría a
un vehículo real estacionarse sin la asistencia de un conductor en su interior.
La visión robótica del sistema mencionado no es parte del trabajo realizado, por lo cual se
simulará su funcionamiento mediante el ingreso de los parámetros requeridos para el
estacionamiento del vehículo, directamente desde una computadora. Esta etapa de visión
robótica está actualmente siendo desarrollada como trabajo tesis por una alumna de la
Maestría de Procesamiento Digital de Señales de la PUCP.
Para el presente trabajo se introducirán manualmente los datos que nos proporcionaría la
etapa de visión robótica al programa de computadora. Este se encargará de generar los
cálculos de la trayectoria que seguirá el vehículo de pruebas para estacionarse. Con ello
se generarán las instrucciones que serán enviadas hacia el vehículo mediante un
protocolo de comunicaciones inalámbrico. Finalmente el sistema electrónico
implementado controlará el servomotor y el motor con caja reductora encargados de la
dirección y del desplazamiento respectivamente. Un codificador incremental detectará el
desplazamiento del vehículo garantizando así que el vehículo logre la trayectoria deseada.
De ser implementado el sistema en un vehículo real, el proyecto plantea lograr con ello
optimizar el espacio utilizado por los vehículos en las zonas de parqueo. Además también
disminuir el tiempo que toma el aparcamiento del vehículo y reducir el riesgo de choque
CAPÍTULO 1: PROBLEMÁTICA DEL ESTACIONAMIENTO
1.1 Introducción
Actualmente en el mundo se estima que hay alrededor de 600 millones de autos;
número que se incrementa rápidamente debido a la producción de vehículos que se
realiza en países como China, Corea y otros mercados emergentes[1]. En nuestro
país también se puede observar un incremento en el parque automotor especialmente
en los últimos años. (Ver anexo 1)
De igual manera, la problemática de sobrepoblación y la falta de espacio en las
ciudades requiere de soluciones que permitan optimizar el espacio de parqueo
utilizado por los vehículos.
El desarrollo de un sistema autónomo para el estacionamiento en paralelo de
vehículos permitiría reducir el espacio utilizado por estos, ya que dicho sistema
utilizaría la cantidad óptima de espacio necesaria para realizar la maniobra,
ejecutándola además de forma rápida y segura.
1.2 Problemas Comunes
Los hechos antes mencionados conllevan a una serie de situaciones que determinan
la problemática a la cual el presente proyecto apunta como alternativa de solución.
Entre estas tenemos:
1.2.1 Exceso de vehículos
Al estar una zona de estacionamiento sobrepoblada de vehículos, estos intentarán
de tránsito. Esto acarrea el incremento del riesgo de choque o ralladuras de los
vehículos al intentar estacionarse. [2]
1.2.2 Riesgo del peatón.
Al haber sobrepoblación vehicular en la zona de parqueo de vehículos, es común
que estos se encuentren obstruyendo el paso y la señalización para peatones
obligando a estos últimos a que transiten por lo la zona de paso de vehículos,
incrementando el riesgo de un accidente que involucre la integridad física del
peatón. [2]
1.2.3 Congestión
La reducción del espacio de parqueo conlleva a que el conductor requiera de
mayor habilidad para efectuar el estacionamiento del vehículo y que también el
tiempo para lograrlo sea mayor. Esto significa que, en el caso de estacionarse en
una avenida transitada por otros vehículos, obstruirá la vía y producirá congestión
vehicular.
1.2.4 Habilidad del conductor
El estacionamiento del vehículo es uno de los procesos más complejos en cuanto
al dominio del manejo del auto se refiere. Especialmente el modo de
estacionamiento en paralelo demanda gran habilidad del conductor del vehículo,
ya que requiere la generación de varios cálculos espaciales por parte del
CAPÍTULO 2: ESTACIONAMIENTO AUTONOMO (SELF PARKING)
2.1 Estado del arte
2.1.1 Presentación del asunto de estudio
Dado los avances tecnológicos en cuanto a sensores, reconocimiento de
imágenes, y volumen de procesamiento de datos, en la actualidad el mercado
automotor intenta dar valor agregado a sus vehículos, no solo en cuanto a
potencia y rendimiento se refiere, sino también en seguridad y confort.
La implementación de la tecnología de estacionamiento autónomo se ha venido
desarrollando desde hace varios años y por varias empresas dedicadas al rubro de
fabricación de vehículos, de manera que podemos encontrar este sistema
instalado ya en varios modelos de autos comerciales de distintas marcas.
En la actualidad existen vehículos comerciales los cuales poseen el sistema de
estacionamiento autónomo que se menciona en este documento.
Entre estos vehículos tenemos:
Marca Ford modelos Focus, Escape, Explorer y Flex
marca Lincoln modelos MKS y MKT
Lexus LS460
Toyota Prius Five
BMW 3-Series
Mercedes-Benz C-Class, CLS-Class Coupe y M-Class SUV
El sistema de estacionamiento autónomo implementado en estos vehículos utiliza
una serie de sonares (sensores ultrasónicos) en la parte anterior y posterior del
vehículo. Estos sensores detectan la presencia de obstáculos así como el
acercamiento de otros vehículos. Estos sensores están conectados a una
computadora central que realiza los cálculos y la toma de decisiones para efectuar
el estacionamiento del vehículo. Adicionalmente el equipo cuenta con actuadores
eléctricos que mueven la mecánica de dirección del auto así como también, en
algunos casos, controlan el avance de este.
El sistema también está respaldado por una cámara que presenta una imagen de
la zona en la que el vehículo se va a estacionar, la cual es vista por el conductor
del vehículo a través de una pantalla que sirve también de interface
Humano-Máquina mediante la cual el conductor ejecuta el ingreso de las instrucciones
necesarias y ratifica la viabilidad del estacionamiento en la zona designada.
2.1.2 Estado de la Investigación
Los sistemas que asisten al conductor, en el control del vehículo para ser
estacionado, fueron inicialmente desarrollados en mediados de la década de 1990.
Pero no fue hasta el 2003 que Toyota produce en masa en un vehículo comercial
con este sistema (Toyota Prius) Luego, compañías como BMW, Mercedes y Ford
incluyeron sistemas similares a algunos de sus vehículos a finales de la primera
década del 2000.
Estos sistemas típicamente utilizan un arreglo de radares para encontrar espacios
de parqueo en diagonal, perpendicular o paralelo. El sistema toma el control de las
ruedas de dirección para llevar al vehículo hacia el espacio vacante mientras que
dadas al conductor por alguna interface humano – máquina (usualmente una
pantalla). El sistema se comunica entre sí mediante protocolo CAN. [3]
Un paper presentado por Massaki Wada, Kang Sup Yoon y Hideki Hashimoto
muestra un complejo sistema que utiliza varios sensores que captan datos de
fuentes externas del vehículo y lo transmiten de forma inalámbrica hacia tres
diferentes microcontroladores. Uno encargado del parqueo del vehículo en sí. Otro
de la administración de la zona de parqueo y el tercero encargado de la interface
humano – maquina.
CAPÍTULO 3: DESARROLLO DEL VEHÍCULO DE PRUEBAS
3.1 Introducción
En el presente capítulo se exponen los datos y criterios utilizados para el diseño del
sistema que permita el control de un vehículo de pruebas que va a ser enlazado a una PC
para su respectivo control. Se abordan además las características mecánicas más
resaltantes del vehículo que son necesarias para el funcionamiento de este proyecto así
como el diseño de la electrónica y algoritmos de funcionamiento.
3.2 Objetivos
3.2.1 Objetivo General
Diseñar e implementar un sistema que permita a una PC comunicarse y controlar a un
vehículo se pruebas de forma inalámbrica y que este pueda ejecutar las instrucciones
recibidas de la PC en tiempo real.
Adicionalmente la mecánica de movimiento del auto debe ser lo más parecida posible a
un automóvil real.
3.2.2 Objetivos Específicos
Desarrollar un sistema que pueda controlar la tracción y la dirección del vehículo de pruebas.
El sistema diseñado deberá ser capaz de comunicarse con una PC de forma inalámbrica.
Desarrollar un programa para microcontrolador que asegure el control del sistema Desarrollar un protocolo de comunicaciones que permita el transmisión de datos
de manera confiable
3.3 CONSIDERACIONES MECÁNICAS
Cuando un vehículo gira, cada una de sus partes describe un movimiento circular
concéntrico y con un radio de giro igual a la distancia que hay entre ese punto y el
centro de giro. Esto determina que cada punto describa en el giro una longitud
diferente para un mismo ángulo recorrido lo cual, para las ruedas, se traduce en una
velocidad de giro distinta para cada una.
Por ello son determinantes para un vehículo, y especialmente para nuestro proyecto,
contar con sistemas mecánicos que permitan que las ruedas no pierdan la sujeción
con el suelo en ningún momento, Es decir, que ninguna de las ruedas resbale por el
suelo, para que los resultados que obtengamos sean consistentes.
En la figura 3-1 se observan los componentes de velocidad de las ruedas V1, V2, V3 y
V4 en base al radio de giro del vehículo al tomar una curva. Estos componentes son
proporcionales a su distancia con respecto al centro de giro “O”: R1, R2, R3 y R4
respectivamente.
Nótese además que el ángulo de viraje de la rueda interna al giro (Avi) es mayor a la
externa (Ave) dado que debe desplazarse describiendo un radio de giro menor.
Figura 3-1: Componentes de velocidad de las ruedas al momento del giro[5].
3.3.1 Sistema Ackerman para la Dirección del Vehículo
El sistema de dirección Ackerman es utilizado en casi todos los vehículos
fabricados en la actualidad. Este sistema permite a las ruedas girar en ángulos
diferentes, de manera que cada rueda sea perpendicular al radio de giro al cual,
cada una es sometida durante la maniobra de giro del vehículo. De esta forma las
ruedas no pierden tracción durante el giro, además que se minimiza el desgaste
producido en ellas.
Como la figura 3-1 lo muestra, cuando un vehículo gira, la rueda delantera exterior
al giro realiza una curva de radio mayor a la rueda delantera interior al giro, por lo
tanto ambas ruedas no deberían tener el mismo ángulo durante la maniobra. El
sistema Ackerman permite a las ruedas tener el ángulo correcto durante el giro, es
3.3.2 La Transmisión Diferencial
El sistema de transmisión de un vehículo se encarga de transferir la energía
mecánica desde el motor hacia las ruedas. En el caso específico de un vehículo de
cuatro ruedas, durante la maniobra de giro del vehículo, las ruedas asociadas al
lado de mayor radio de curvatura (lado del auto opuesto al sentido de giro)
presentarán una mayor velocidad que las ruedas del lado asociado al menor radio.
Debido a esto, el sistema de tracción debe ser capaz de permitir a las ruedas girar
a diferentes velocidades manteniendo la velocidad del vehículo contante. El
sistema de tracción diferencial hace esto posible.
Existen varios tipos de sistemas de tracción diferencial. Entre estos tenemos[7]:
- Libre
- De deslizamiento limitado
- De deslizamiento controlado
Los dos últimos tipos mencionados, a excepción del diferencial de tipo libre, tienen
la capacidad de funcionar correctamente durante la pérdida de tracción de una de
las ruedas conectadas al diferencial, volviéndolos también por este motivo más
complejos y costosos.
Dado que para el caso del estacionamiento del vehículo no se contempla pérdida
de tracción en ninguna de las ruedas, seleccionamos para el caso del vehículo de
pruebas (Figura 3-7), el uso de un diferencial del tipo libre.
El diferencial de tipo libre consta básicamente de “La Corona” que es el engranaje
que recibe la fuerza del motor. (pasando antes por la caja de cambios). Luego esta
mueve unos engranajes más pequeños llamados “satélites” los cuales van a
transmitir la potencia hacia “Los Planetarios”, que son engranajes unidos a los ejes
de las ruedas. Son los “satélites” los que además permiten a las ruedas girar a
En la Figura 3-2 se presenta el esquema de un diferencial tipo libre en el cual se
puede observar que, al no girar los “satélites”, los ejes van a girar al unísono con
“la corona”, de esta forma ambos ejes giran a la misma velocidad. Esto ocurre
cuando el vehículo está avanzando en línea recta.
Por otro lado, en la figura 3-3 se observa que al girar los “satélites”, los
“planetarios” giran uno opuesto con respecto al otro, lo que se traduce en una
diferencia en la velocidad de giro de los planetarios cuando estos son movidos por
la corona, produciendo así la diferencia de velocidades de la ruedas que es
necesaria cuando el vehículo está realizando una curva.
Figura 3-2:
Funcionamiento del diferencial cuando ambas ruedas giran a la misma velocidad[8].3.4 CARACTERÍSTICAS DEL VEHÍCULO SELECCIONADO
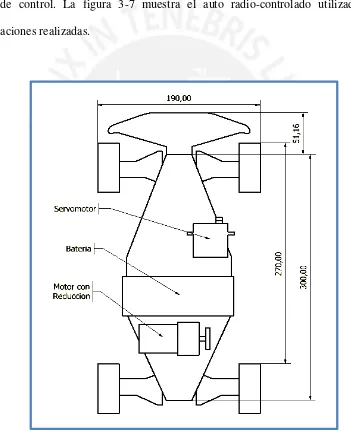
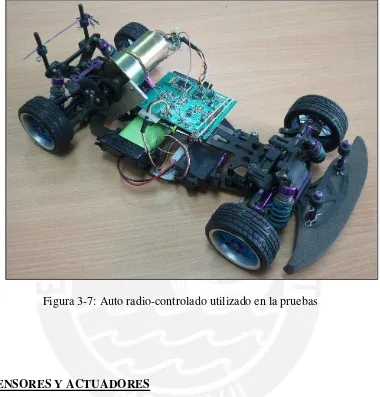
[image:13.595.127.478.272.706.2]Para el desarrollo del sistema se escogió un modelo de auto a escala radio-controlado, el
cual, para que cumpla con los requerimientos del proyecto, se le retiró el motor y el circuito
de control inalámbrico que traía originalmente. Siendo luego reemplazados por un motor
con caja reductora y codificador, el cual fue acoplado al vehículo y conectado a la nueva
tarjeta de control. La figura 3-7 muestra el auto radio-controlado utilizado con las
modificaciones realizadas.
Figura 3-5: Detalle del sistema de dirección tipo Ackerman
Figura 3-7: Auto radio-controlado utilizado en la pruebas
3.5
SENSORES Y ACTUADORES
Para lograr el control general del vehículo se requiere el uso de actuadores y sensores
que permitan el control tanto de la tracción como de la dirección. De esta manera se
asegura el correcto posicionamiento del vehículo.
Para ello se le instalaron los siguientes sensores y actuadores:
Servomotor
3.5.1 El Servomotor
Tomando en cuenta la mecánica involucrada en el chasis, para el movimiento de
las ruedas que permiten la maniobra de giro, se requiere de un dispositivo que
pueda girar un ángulo mayor a 100° y que posea control en la posición (ángulo) de
[image:16.595.149.471.249.500.2]giro.
Figura 3-8: Mecanismo de dirección movido por el servomotor
El servomotor es un sistema mecánico eléctrico controlado a través de un lazo de
realimentación. Es decir, el sistema de control realiza una medición ya sea de
velocidad o de posición para hacer efectivo el control sobre este mecanismo.
El servomotor utilizado en este proyecto es de la marca Futaba modelo S9402. El
cual es un servomotor que funciona con una alimentación de 5V y es utilizado
generalmente en modelos a escala radio-controlados.
En la figura 3-9 podemos observar la señal enviada hacia el servo para su control,
mientras que en la parte derecha de la imagen vemos las respectivas posiciones del
servo para esas señales.
Figura 3-9: Señales de control del servomotor Futaba [9]
La Tabla 3-1 muestra las características del servomotor marca Futaba modelo
[image:17.595.123.524.210.507.2]S9402 y la figura 3-10 muestra la imagen del mismo.
Tabla 3-1: Características del servomotor S9402 [10]
Tamaño 1.6 x 0.8 x 1.5" (1-5/8 x 13/16 x 1-1/2") (41 x 20 x 38mm)
Peso 1.9oz (1-15/16oz) (55 grams)
Torque 6.4 kg-cm @ 4.8V - 8.0 kg-cm @ 6V
Velocidad de giro 12 sec/60° @ 4.8V - .10 sec/60° @ 6V
Figura 3-10: Servo marca Futaba, modelo S9402 [10]
3.5.2 El Motor DC con caja reductora
Para la selección del motor con caja reductora debemos tener en cuenta la aceleración y
la velocidad máxima que esperamos del vehículo.
La velocidad del vehículo define las RPM (Revoluciones por minuto) del motor con
reducción. Para el caso del estacionamiento de un vehículo real, este difícilmente supera
los 10Km/h durante la maniobra de estacionamiento. Para el caso del vehículo utilizado
(escala 1:10) esto representaría unos 27.8 cm/seg.
Las ruedas utilizadas por el vehículo tienen 6 cm de diámetro por lo que su perímetro es
de 18.85 cm. Esto significa que para que el vehículo tenga la velocidad mencionada, las
ruedas deben de girar a 1.47 vueltas/seg.
Finalmente dado que el mecanismo de transmisión del vehículo tiene una reducción de
3.3 : 1 desde el motor con reducción hacia las ruedas, la velocidad de giro del motor con
reducción es de 4.87 vueltas/seg. Aproximadamente.
Para el caso de la aceleración se considera que el vehículo pueda llegar a su velocidad de
Dado que la masa del vehículo es de 1350g, para lograr la aceleración requerida
(F = M.A) necesitamos un empuje de 40500 g.cm/seg^2 lo cual se traduce en 41.33
gramos – fuerza.
Ya que la rueda del vehículo tiene un radio de 3cm, el torque en el eje de la rueda
necesario para acelerar el vehículo resulta 124g/cm.
Despreciando el momento de inercia de las ruedas y de los engranajes debido a su poca
masa (Ambos son fabricados en plástico) y a que la reducción mecánica de la transmisión
incrementa el torque en el eje de las ruedas, calculamos el torque del motor con reducción
en 37.56 g/cm. Para cumplir con los requerimientos especificados.
Según los requerimientos se escogen en la marca MAXON MOTOR los siguientes
componentes:
Motor:
A-max 16 Ø16 mm, Precious Metal Brushes CLL, 1.2 Watt, CE approved,
with terminals
Part number 110054
Reductor:
Gearhead GS 16 A Ø16 mm, 0.015 - 0.04 Nm
Part number 144410
(Ver detalles en anexos)
A pesar de ello, por cuestiones de costo y tiempo, se implementó el prototipo con
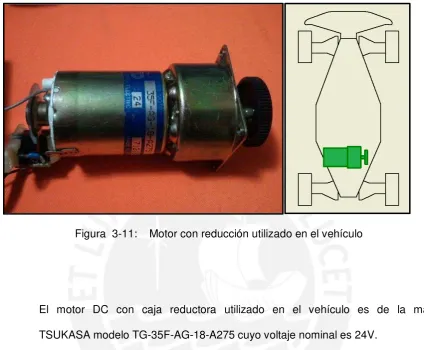
Figura 3-11: Motor con reducción utilizado en el vehículo
El motor DC con caja reductora utilizado en el vehículo es de la marca
TSUKASA modelo TG-35F-AG-18-A275 cuyo voltaje nominal es 24V.
Así mismo su consumo sin carga es de 120 mA y su velocidad de giro sin carga es
de 7400 RPM.
La reducción de la caja tiene una relación de 1:20
El eje del motor DC lleva acoplado un codificador incremental óptico y, tomando en
cuenta que el codificador incremental nos permite una resolución de 100 pasos
por vuelta y que tenemos una reducción de 1:20, en teoría, podríamos obtener 100
3.5.3 El Codificador Incremental
Al haber hecho la selección del motor con reductor de la marca MAXON MOTOR,
para cumplir con el requerimiento de control de velocidad en la tracción del
vehículo, se requiere la detección del desplazamiento del motor por parte de algún
sensor.
Dentro de los requerimientos que se deben de cumplir para la selección del sensor
se encuentran la resolución del sensor y que éste sea acoplable al eje del motor.
En la selección de la resolución nos valemos de la precisión del reductor.
Según hoja de datos el eje de salida del reductor presenta un juego promedio de
un grado por lo que, al ser su reducción de 12 a 1, significa que el eje de entrada
del reductor se puede mover 12 grados sin que se aprecie movimiento en el eje de
salida. Por tal motivo la resolución máxima que el sistema mecánico permite medir
en el codificador incremental es de 30 pasos por vuelta.
Tomando esto en cuenta se escoge de la marca MAXON MOTOR el codificador
incremental óptico:
Encoder MR, Typ M, 32 Counts per turn, 2 Channels
Part number 201935
(Ver detalles en anexos)
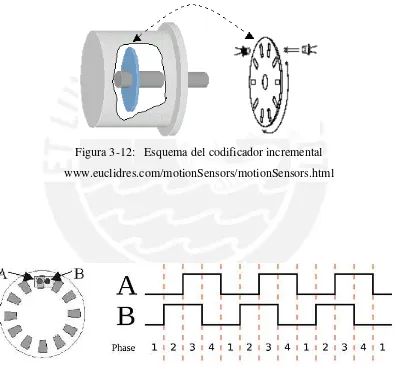
El codificador incremental óptico es el dispositivo que va a permitir al sistema
saber cuánto se ha desplazado el móvil. Su funcionamiento se basa en la
interrupción de un haz de luz por un disco ranurado adosado al eje del motor
encargado de la locomoción del vehículo. Internamente consta de un diodo emisor
de luz y dos fotoreceptores los cuales se encuentran es desfase frente al haz de
dos sensores den como resultado una señal similar a la que se muestra en la
figura 3-13. Basta una de las señales para saber el desplazamiento del disco ya
que, sabiendo de antemano cuantas ranuras tiene el disco, podemos contar los
pulsos y calcular cuántas vueltas ha dado este. La segunda señal es utilizada en
[image:22.595.112.507.253.621.2]conjunto con la primera para saber en qué dirección gira el disco.
Figura 3-12: Esquema del codificador incremental
www.euclidres.com/motionSensors/motionSensors.html
Figura 3-13: Señales de salida del codificador incremental[11].
3.6 EL SISTEMA ELECTRÓNICO DE CONTROL
Los requerimientos del sistema electrónico de control son:
Control de la posición del servomotor
Alimentación del servomotor
Control de la velocidad del motor con reducción
Control de la dirección de giro del motor con reducción
Detección del codificador incremental.
Comunicación con la PC
Indicadores visuales
Posibilidad de reprogramación
Funcionamiento a baterías
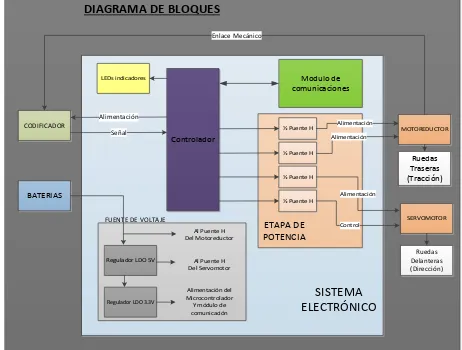
La figura 3-14 muestra el esquema en el que está organizado el circuito electrónico de
Controlador
Modulo de comunicaciones
LEDs indicadores
Regulador LDO 5V
Regulador LDO 3.3V FUENTE DE VOLTAJE BATERIAS
½ Puente H
½ Puente H
½ Puente H
½ Puente H
MOTOREDUCTOR SERVOMOTOR Alimentación Alimentación Alimentación Control CODIFICADOR Alimentación Señal
Al Puente H Del Servomotor
Alimentación del Microcontrolador Y módulo de comunicación
ETAPA DE POTENCIA
Al Puente H Del Motoreductor
DIAGRAMA DE BLOQUES
[image:24.595.86.548.109.459.2]SISTEMA
ELECTRÓNICO
Enlace Mecánico Ruedas Traseras (Tracción) Ruedas Delanteras (Dirección)Figura 3-14: Diagrama de bloques del sistema electrónico
El sistema electrónico de control consta básicamente de cuatro bloques:
Microcontrolador
Módulo de comunicaciones
Puentes H
Sistema de alimentación
El sistema de control está administrado por un microcontrolador. El cual hace uso de
un módulo de comunicaciones vía protocolo BlueTooth para la recepción y transmisión
de datos hacia la PC. La etapa de potencia está conformada por 4 mitades de puente
reductora que genera la tracción que da movimiento al vehículo y las otras dos
controlan y alimentan al servo-motor que da dirección a las ruedas delanteras.
Adicionalmente también el sistema cuenta con reguladores de voltaje para la
alimentación adecuada de los diversos componentes y LEDs indicadores que permiten
saber el estado de diferentes procesos que realiza el microcontrolador.
Para permitir la autonomía del sistema, este es alimentado por baterías.
Las figuras 3-15 y 3-16 muestran ambas caras de la tarjeta electrónica implementada
[image:25.595.115.551.268.722.2]para el proyecto y que es descrita en el diagrama de bloques visto en la figura 3-14.
Figura 3-15: Lado superior de la tarjeta electrónica
A continuación se detallan las características de los módulos que conforman el
sistema electrónico de proyecto.
3.6.1 El microcontrolador
Para el control del sistema tenemos los siguientes requerimientos:
- 8 líneas IO para el control de las 4 mitades de puente H
- 5 líneas IO para señalización con LEDs
- 3 líneas IO para el control y lectura del codificador incremental
- 1 puerto USART para la comunicación con el módulo BlueTooth
- 1 registro contador de 16 bits
- 1 registro temporizador de 8 bits
- Funcionamiento con 3.3V (para compatibilidad con el módulo de comunicación)
- Oscilador interno
- Bajo Costo
Al realizar la búsqueda de microcontroladores con las características
mencionadas, llegamos a tres propuestas:
Modelo Fabricante Costo $ Vendedor
16f722A Microchip 1.52 X 10un. DigiKey
MSP430F2101IPWR
NationalSemiconductor.
1.55 X 10un.
DigiKeyAtmega8A-AU Atmel 1.1 X 5un. Ebay Seleccionado
Adicionalmente, a diferencia de los no seleccionados, el costo de Ebay incluye costos
Teniendo en cuenta estos requerimientos se escoge finalmente de la empresa ATMEL
[image:27.595.163.443.181.389.2]el microcontrolador Atmega8A-AU (Figura 3-17)
Figura 3-17: Microcontrolador ATMEGA8 16AU
3.6.2
Funcionamiento del programa del microcontrolador
Para la administración del sistema que va a controlar el vehículo de pruebas, el
microcontrolador realiza una serie de tareas que se pueden dividir en tres bloques:
Control del motor DC y detección del codificador incremental.
El microcontrolador, para controlar el motor DC con caja reductora, lo hace
a través de un arreglo de puente H. Permitiendo con ello el giro del motor
en ambos sentidos (avance y retroceso del vehículo). El microcontrolador
recibe las señales del codificador incremental para así medir y el avance y
dirección del vehículo ya que el codificador brinda información tanto de las
revoluciones del motor como del sentido de giro de este. En esta etapa el
microcontrolador hace uso de un contador interno capaz de realizar
cuentas de 16 bits mediante una señal externa que es dada por el
Desplazarce?
Inicio
Dirección? Encendido de motor hacia atrás Encendido de motor hacia adelante Control de Velocidad Control de Velocidad Detección de desplazamiento Detección de desplazamiento Llega a destino? Llega a destino? Fin Si Retroceder Avanzar No No Si SiAlgoritmo de
control del motor
con recucción
Figura 3-18: Diagrama del Flujo del Algoritmo de control del motor con reducción
El control del servomotor que maneja la dirección del vehículo
Como ya se ha mencionado anteriormente en el acápite 2.2.2, el
servomotor requiere de una señal modulada en ancho de pulso (PWM) con
una frecuencia constante. Para ello se hace uso de un temporizador interno
de interrupción, nos proporciona la duración de cada pulso, controlando
así a la señal PWM enviada hacia el servo-motor
Salida Servo = 1 Interrupción Temporizador
Secuencia = 0? Secuencia = 1?
Reprograma temporizador Timer = 1ms + Delta
Secuencia = 1
Salida Servo = 0
Reprograma temporizador Timer = 1ms - Delta
Secuencia = 2
Fin Interrupción
Reprograma temporizador Timer = 1ms
mSeg = 18?
mSeg = mSeg + 1
mSeg = 0
Secuencia = 0
Si No Si No No Si Inicio Se programa Interrupción por temporizador Timer = 1 ms
Indicador de fase de programa Secuencia = 0
Contador de milisegundos mSeg = 0
Fin
Rutina de inicialización
Rutina de
Interrupción
Algoritmo de control del Servo Motor
Figura 3.19: Diagrama del Flujo del Algoritmo de control del Servo Motor
Comunicación con la PC
En la comunicación con la PC, el sistema está a la espera de las órdenes
que esta le envíe. Cada uno de los datos enviados por la PC debe de
iniciar con la cabecera “F9 F5” la cual valida los siguientes datos que van a
ser tomados por el microcontrolador como una instrucción de control.
Por cada instrucción de control que recibe, el programa principal lo
Una vez realizada cada maniobra, el microcontrolador envía la instrucción
“A1” hacia la PC con lo cual confirma que la instrucción fue realizada con
éxito.
Interrupción USART
Se reenvía Dato
Sec = 0? Sec = 1?
Dato = F9? Dato = F5?
Sec = 1 Sec = 2
1er Nibble de Dato = 1?
1er Nibble de Dato = 2?
1er Nibble de Dato = 7?
1er Nibble Data1 = 2do Nibble de Dato
2do Nibble Data1 = 2do Nibble de Dato
2do Nibble Data4 = 2do Nibble de Dato
No No Si
Si Si Si No Si Si Si
Fin Rutina de Interrupción
No
Sec = 0
1er Nibble de Dato = 3?
1er Nibble Data2 = 2do Nibble de Dato
Si
No
No
No No
Algoritmo de recepción
de datos de la PC
Figura 3-20: Diagrama del Flujo del Algoritmo de recepción de datos desde la PC
3.6.3 El módulo de transmisión con protocolo Bluetooth
Para la comunicación del vehículo con la PC se utiliza un módulo de
comunicaciones (transceptor) que funciona como interface entre protocolos
BlueTooth y UART (Figura 3-21) y que no requiere conexión de componentes
El protocolo BlueTooth trabaja en frecuencias de 2,4 GHz, transmitiendo hasta
24Mbits/s (en las versiones 3 y 4).
Los dispositivos BlueTooth se caracterizan por su bajo costo, Bajo Consumo y
corto alcance de transmisión. [12]
Este protocolo (BlueTooth) fue escogido además debido a la gran difusión que
tiene especialmente en dispositivos portátiles como laptops y teléfonos celulares,
otorgando gran flexibilidad para el control del sistema, y permitiendo así, la
reducción en el costo de implementación del sistema de comunicaciones ya que, al
contar la PC con un módulo integrado, sólo se requiere de un módulo adicional en
el vehículo para completar el sistema de comunicaciones.
El módulo utilizado funciona con 3.3V y es configurable para diferentes
velocidades de transmisión. Es bastante simple de utilizar pues emula una
conexión serial a través de un puerto COM en la computadora.
Figura 3-22: Esquema de conexión del módulo de transmisión BlueTooth
3.6.4 Módulo de puentes H
Un puente H utiliza como etapa de potencia MOSFETs en arreglos de pares
complementarios. El componente utilizado es el FDS8958A que es un circuito
integrado que consta de dos MOSFET. Uno de canal P y el otro de canal N.
Q1: Canal N
7.0A, 30V RDS(on) = 0.028
@ VGS = 10V
RDS(on) = 0.040
@ VGS = 4.5V
Q2: Canal P
-5A, -30V RDS(on) = 0.052
@ VGS = -10V
[image:32.595.108.494.98.433.2]RDS(on) = 0.080
@ V
GS = -4.5VFigura 3-23: Esquema del FDS8958A
Para asegurar adecuada velocidad de conmutación de los MOSFET en la
con componentes activos (transistores BJT) los cuales trabajan en las regiones de
corte y saturación comandados por el microcontrolador.
[image:33.595.96.506.179.466.2]
Figura 3-24: Diagrama del controlador de un MOSFET
En la figura 3-24 se muestra el circuito esquemático del controlador de MOSFET.
Este circuito es utilizado indistintamente tanto para los MOSFET canal P como los
de canal N.
El voltaje de entrada del controlador de MOSFET es 3.3V. Puede controlar voltajes
de salida hacia el Gate del MOSFET entre 5V y 12V, según su voltaje de
alimentación y alcanza frecuencias de conmutación de hasta 500KHz
Nótese la presencia de capacitores asociados a las bases de los BJT. Estos son
utilizados para contrarrestar el efecto Miller durante la conmutación del transistor y
así poder lograr la velocidad adecuada.
3.7DESARROLLO DEL ALGORITMO DE PARQUEO
Para el desarrollo del algoritmo se tomó en cuenta el modelo dinámico del vehículo y
la metodología para el estacionamiento en paralelo.
3.7.1 Modelo dinámico del vehículo
Sea el punto “O” el centro de curvatura del giro del vehículo cuya proyección de la
distancia “l” medida entre el punto medio de sus ejes “R” y “F” intersecta el origen
de coordenadas.
Además sea el ángulo generado entre la proyección de “l” y el ángulo de
[image:34.595.141.473.335.612.2]desviación de las ruedas delanteras. (Figura 3-25)
Figura 3-25: Modelo del vehículo
nemos entonces que el modelo dinámico [14],[15],[16] del vehículo es el siguiente:
̇
……….(1)
̇
………..(3)
Donde es la velocidad en la dirección en la que avanza el vehículo.
3.7.2Metodología para el Estacionamiento en Paralelo
Durante la maniobra de giro, cada punto del vehículo describe un arco de círculo.
Tomando en cuenta esto, para el siguiente estudio se requiere como datos
únicamente las circunferencias externas e internas que genera el vehículo. Es
decir, tomando en cuenta la figura 3-26 equivaldría a los arcos producidos por los
puntos “A” e “I” de la representación del vehículo cuando este gira hacia la
[image:35.595.90.540.333.653.2]derecha.
Para el análisis del movimiento del vehículo en la zona de parqueo se observa primero
como el vehículo sale del estacionamiento y cuál sería su posición final para luego partir
desde ese mismo punto y definir la mecánica del estacionamiento del vehículo tomando
en cuenta los movimientos que realizó.
Analizando la figura 3-26, inicialmente el vehículo aparcado realiza un giro hacia la
izquierda de modo que el punto “B” del auto, no toque el obstáculo que tiene delante.
Luego al girar hacia la derecha, para que el vehículo quede paralelo a la vía, se debe
tener en cuenta al círculo de menor radio generado por el vehículo, es decir al círculo
[image:36.595.157.458.329.683.2]producido por el punto próximo a “I” que corresponde a la rueda trasera derecha.
Entonces, considerando que, el radio de curvatura del vehículo “R” es la distancia del
centro del círculo, descrito por la trayectoria del vehículo al punto medio del eje trasero de
este. Además considerando “a” al ancho del carro y “b” la distancia comprendida entre las
ruedas delanteras y traseras (figura 3-27).
En la figura 3-28 se muestra el modelo de giro del vehículo. En adelante consideraremos
[image:37.595.187.405.276.554.2]a “L” como la distancia entre los puntos “F” y “A” y a “W” como el ancho del obstáculo ̅̅̅̅
Figura 3-28: Modelo de giro[17].
Podemos calcular la distancia mínima que debe tener el vehículo de pruebas hasta el
primer obstáculo[17]. Asumiendo que ambos son del mismo ancho y que la maniobra
contempla salir sin la necesidad de retroceder en el intento.
Definimos (de la figura 3-27):
√ es el radio de la circunferencia descrita por el punto “A”
Entonces la distancia mínima entre las ruedas traceras del vehiculo y el objeto de
adelante. Que corresponde a ̅̅̅̅ es:
√ …..……….….(4)
Entonces el espacio mínimo para estacionarse es:
√ + ̅̅̅̅ ………..……….(5)
además
√ Cos(α) = R + a/2 - W ………..………..(6)
Donde “α” es el angulo del arco correspondiente a la posicion del vehiculo cuando está a
punto de salir de la zona de estacionamiento (cuando el punto “B” esté mas cerca al
obstaculo en la fig 2-16).
También observamos que para diferentes posiciones finales del vehículo, en la que este
queda nuevamente en paralelo a la acera, se debe de cumplir que el arco recorrido en
sentido horario debe ser igual al recorrido en sentido antihorario.
De esta forma el vehículo queda a
(2R)Sen(β) ………..….………..(7)
delante y
(2R)Cos(β) ……….……….………...………(8)
Donde β es el ángulo del arco recorrido por el vehículo.
Para la descripción del algoritmo utilizado, definimos previamente:
Vehículo: El vehículo de Pruebas descrito en este trabajo.
Obstáculo: Vehículo obstáculo que quedará delante del vehículo de pruebas luego de
la maniobra de parqueo.
Tomando en cuenta lo definido, describimos el algoritmo de parqueo utilizado de la
siguiente manera:
- En base al tamaño del obstáculo, con la ecuación (4) se define la distancia final
entre el obstáculo y el vehículo, obteniendo así la posición final del vehículo.
- Al detenerse el vehículo cerca de la zona de parqueo se mide la distancia lateral
entre este y el obstáculo.
- Con la distancia hallada anteriormente y mediante la ecuación (7) calculamos el
arco del desplazamiento del vehículo.
- Con el arco hallado se calcula con la ecuación (8) el desplazamiento horizontal del
vehículo.
- Se desplaza al vehículo (movimiento horizontal) de forma que se encuentre a una
distancia igual a la hallada en la ecuación (8) de la posición final para asegurar que
luego de la maniobra el vehículo quedará en la posición final deseada.
- Luego de posicionar al vehículo en el lugar correspondiente al inicio de la
maniobra de parqueo, procedemos a ejecutar la maniobra sabiendo de antemano
que este llegará finalmente a la posición deseada.
Para el funcionamiento del algoritmo se asume que el vehículo de pruebas se encuentra
El programa de control requiere el ingreso de la distancia lateral del vehículo al obstáculo
(dato d1) y la distancia paralela al vehículo medida entre la rueda trasera y el inicio del
obstáculo (dato d2). Estos datos serían los obtenidos por el sistema de visión robótica
ubicado sobre el vehículo, en la zona de parqueo.
El siguiente diagrama de flujo muestra el algoritmo de estacionamiento en paralelo
utilizado:
Se reciben los datos del sistema de visión d1 y d2
INICIO
Se usa d1 para calcular la posición
final del móvil
Con la posición final se calcula la posición inicial para
el d1 recibido
Se retrocede usando dato d2 y
posición inicial deseada ¿Móvil está antes
o después de la posición inicial?
Se avanza usando dato d2 y posición inicial deseada
Despues
Se Ejecutan rutinas de movimientos pre-calculados que llevan el móvil a la posición final
deseada Se calcula longitud
de arco de maniobras de giro
FIN
Algoritmo general del
proceso
[image:40.595.97.557.277.647.2]Antes
CAPÍTULO 4: PRUEBAS EXPERIMENTALES
Para la realización de las pruebas experimentales, fue necesaria la generación de un
programa de interface para el ingreso e interpretación de datos
4.1 Programa de interface
El programa, que fue realizado con el lenguaje de programación Visual Basic 6.0,
cuenta con un bloque de control del puerto serial, en el cual se establecen el número
de puerto de comunicaciones y la velocidad de transmisión.
Para las pruebas de funcionamiento, se ingresan los valores de distancia del vehículo
de pruebas con respecto al vehículo obstáculo tanto perpendicular como
horizontalmente. La figura 4-1 muestra los parametros d1 y d2.
El parámetro d1 es la distancia perpendicular entre los vehículos
El parámetro d2 es la distancia horizontal entre el centro de la rueda posterior del
vehículo y el inicio del vehículo obstáculo.
La figura 4-2 muestra la interface gráfica del programa de control. En ella, una vez
ingresados los parámetros d1 y d2 en sus respectivos espacios se presiona el botón
“Interpretar”. El programa calculará los parámetros que serán enviados hacia el
vehículo mostrándolos en el área denominada “Secuencia a Seguir”. Finalmente, al
presionar el botón “Ejecutar” estos parámetros serán enviados hacia el vehículo.
[image:42.595.90.531.279.575.2]Luego, el vehículo ejecutará de manera secuencial las instrucciones recibidas.
Figura 4-2: Interface gráfica del Programa de pruebas para la PC
4.2 Calibración y regulación del giro
Debido a la configuración del vehículo utilizado en las pruebas, el radio de giro en
sentido horario es diferente al del sentido antihorario en función a la cantidad de
de tal manera que el radio de giro en ambos sentidos sean iguales. Esta regulación se
realizó modificando valores de límite de movimiento del servo en el programa de la
computadora.
4.3 Calibración de la distancia de avance del vehículo
Se realizó la calibración del avance y su respectiva regulación para la concordancia
entre la distancia ingresada desde la computadora a manera de instrucción y la
distancia recorrida por el vehículo en la realidad. Esta se realizó haciendo recorrer al
móvil la distancia de un metro y constatar cuantos pasos generó el codificador
incremental para así, obtener la relación de pasos contados en el codificador por
centímetro de desplazamiento real.
4.4Pruebas experimentales
Para verificar el correcto funcionamiento del sistema se realizaron nueve pruebas que
fueron repetidas 10 veces.
Para las pruebas experimentales se consideró la combinación de los siguientes valores
(en centímetros) de d1 y d2:
d1 = 0, d1 = 5 y d1 = 10
d2 = 1, d2 = 10 y d2 = 20
La figura 4-3 muestra los valores a medir en las pruebas.
delta X :
Distancia paralela al vehículo desde el punto de estacionamiento
deseado hasta la rueda trasera derecha en centímetros.
delta Y1 :
Distancia perpendicular al vehículo medida desde el punto de
estacionamiento deseado hasta la rueda trasera derecha en
centímetros.
[image:44.595.111.532.132.560.2]delta Y2 :
Distancia perpendicular al vehículo medida desde el punto de
estacionamiento deseado hasta la rueda delantera derecha en
centímetros.
Figura 4-3: Mediciones realizadas en las pruebas (cm)
(La flecha indica la parte delantera del vehículo)
La posición final ideal del vehículo corresponde a los valores de delta X, delta Y1 y
delta Y2 igual a cero.
coordenadas y la rueda delantera derecha sobre el eje X.
Prueba 1
[image:45.595.47.562.138.668.2](d1=1cm, d2=0cm)
Tabla 4-1: Resultados de la prueba 1
d1=1, d2=0Prueba delta X(cm) deltaY1(cm) deltaY2(cm)
1 1 0.5 0.4
2 2 0.1 0.5
3 1.7 -0.3 0.3
4 1.4 0.2 0.3
5 0.7 0.2 0.1
6 1.5 -0.2 0.3
7 2.5 0 0.5
8 2 -0.2 0.2
9 1.3 -0.2 0.3
10 1.7 -0.3 0
Media 1.58 -0.02 0.29
Desv. Est. 0.50 0.25 0.15
Al graficar los datos de la tabla se obtiene:
Figura 4-4: Dispersión de resultados de la prueba 1
La figura 4-4 muestra la dispersión de la posición final de ambas ruedas laterales derechas.
El punto deseado para la rueda lateral derecha trasera es (0,0) y el punto deseado para la
rueda lateral derecha delantera es (27,0)
-0.5 -0.3 -0.1 0.1 0.3 0.5 0.7 0.9
-3 2 7 12 17 22 27 32
E rr or e n e je y
Error en eje x
d1=1, d2=0
R. Trasera
Prueba 2
[image:46.595.44.560.136.664.2](d1=1cm, d2=10cm)
Tabla 4-2: Resultados de la prueba 2
d1=1,d2=10
Prueba delta X(cm) deltaY1(cm) deltaY2(cm)
1 2.5 -0.4 0.2
2 1.3 0.2 0.4
3 2 0.1 0.4
4 2 -0.5 0
5 1.7 0.1 0.4
6 1.8 -0.3 0.1
7 1.7 -0.7 0
8 1.3 0.2 0.4
9 1.4 -0.2 0.2
10 2.5 -0.4 0.3
Media 1.82 -0.19 0.24
Desv. Est. 0.42 0.30 0.16
Al graficar los datos de la tabla se obtiene:
Figura 4-5: Dispersión de resultados de la prueba 2
La figura 4-5 muestra la dispersión de la posición final de ambas ruedas laterales derechas.
El punto deseado para la rueda lateral derecha trasera es (0,0) y el punto deseado para la
rueda lateral derecha delantera es (27,0)
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
-3 2 7 12 17 22 27 32
E rr or e n e je y
Error en eje x
d1=1, d2=10
R. Trasera
Prueba 3
[image:47.595.51.558.137.673.2](d1=1cm, d2=20cm)
Tabla 4-3: Resultados de la prueba 3
d1=1,d2=20
Prueba delta X(cm) deltaY1(cm) deltaY2(cm)
1 1.6 0.3 0.5
2 1.4 -0.2 0.3
3 1.7 -0.3 0.2
4 2.5 -0.7 0.1
5 2.7 -0.4 0.2
6 2.3 0.4 0.4
7 1.5 1.2 1
8 1.8 0.2 0.3
9 2.2 -0.3 0.2
10 2.5 0 0.6
Media 2.02 0.02 0.38
Desv. Est. 0.45 0.51 0.25
Al graficar los datos de la tabla se obtiene:
Figura 4-6: Dispersión de resultados de la prueba 3
La figura 4-6 muestra la dispersión de la posición final de ambas ruedas laterales derechas.
El punto deseado para la rueda lateral derecha trasera es (0,0) y el punto deseado para la
rueda lateral derecha delantera es (27,0)
-1 -0.5 0 0.5 1 1.5
-3 2 7 12 17 22 27 32
E rr or e n e je y
Error en eje x
d1=1, d2=20
R. Trasera
Prueba 4
[image:48.595.45.561.136.672.2](d1=5cm, d2=0cm)
Tabla 4-4: Resultados de la prueba 4
d1=5,d2=0
Prueba delta X(cm) deltaY1(cm) deltaY2(cm)
1 1.2 1.4 1.4
2 0.8 1 1.1
3 1.3 1.1 0.8
4 2.2 0.5 1.3
5 1.1 0.9 1.1
6 1.5 1.2 1.3
7 1.4 -0.2 0.9
8 1.4 -0.2 0.8
9 1.7 0.6 1.2
10 1 0.1 0.9
Media 1.36 0.64 1.08
Desv. Est. 0.39 0.58 0.22
Al graficar los datos de la tabla se obtiene:
Figura 4-7: Dispersión de resultados de la prueba 4
La figura 4-7 muestra la dispersión de la posición final de ambas ruedas laterales derechas.
El punto deseado para la rueda lateral derecha trasera es (0,0) y el punto deseado para la
rueda lateral derecha delantera es (27,0)
-0.5 0 0.5 1 1.5 2
-3 2 7 12 17 22 27 32
E rr or e n E je y
Error en eje x
d1=5, d2=0
R. Trasera
Prueba 5
[image:49.595.45.562.128.660.2](d1=5cm, d2=10cm)
Tabla 4-5: Resultados de la prueba 5
d1=5,d2=10
Prueba delta X(cm) deltaY1(cm) deltaY2(cm)
1 1.4 1.2 1
2 1.3 1.3 1
3 4.5 1.8 1.7
4 1.7 1.3 1.5
5 2 0.9 1.4
6 1.8 0.8 1.1
7 2 1.1 1.5
8 2.8 1.5 1.4
9 2 0 0.8
10 1.9 0.6 1.3
Media 2.14 1.05 1.27
Desv. Est. 0.92 0.51 0.28
Al graficar los datos de la tabla se obtiene:
Figura 4-8: Dispersión de resultados de la prueba 5
La figura 4-8 muestra la dispersión de la posición final de ambas ruedas laterales derechas.
El punto deseado para la rueda lateral derecha trasera es (0,0) y el punto deseado para la
rueda lateral derecha delantera es (27,0)
-0.5 0 0.5 1 1.5 2
-3 2 7 12 17 22 27 32
E rr or e n e je y
Error en eje x
d1=5, d2=10
R. Trasera
Prueba 6
[image:50.595.45.549.133.671.2](d1=5cm, d2=20cm)
Tabla 4-6: Resultados de la prueba 6
d1=5,d2=20
Prueba delta X(cm) deltaY1(cm) deltaY2(cm)
1 1.3 1.3 1.1
2 1.4 0.7 0.6
3 1.8 0.5 0.6
4 1.5 -0.3 0.5
5 2.2 -0.1 0.7
6 2.4 -0.6 0.3
7 2.8 -0.1 0.5
8 2 -0.2 0.6
9 2.1 -1.1 0
10 2.2 -1 0.2
Media 1.97 -0.09 0.51
Desv. Est. 0.47 0.75 0.30
Al graficar los datos de la tabla se obtiene:
Figura 4-9: Dispersión de resultados de la prueba 6
La figura 4-9 muestra la dispersión de la posición final de ambas ruedas laterales derechas.
El punto deseado para la rueda lateral derecha trasera es (0,0) y el punto deseado para la
rueda lateral derecha delantera es (27,0)
-1.5 -1 -0.5 0 0.5 1 1.5 2
-3 2 7 12 17 22 27 32
E rr or e n e je y
Error en eje x
d1=5, d2=20
R. Trasera
Prueba 7
[image:51.595.49.549.144.667.2](d1=10cm, d2=0cm)
Tabla 4-7: Resultados de la prueba 7
d1=10,d2=0
Prueba delta X(cm) deltaY1(cm) deltaY2(cm)
1 2.2 0.6 1.5
2 3.3 0.5 1.8
3 2.2 0.1 1.2
4 2.3 0.1 1.3
5 2.5 0.3 1.6
6 4 0 2
7 2.3 0.1 1.4
8 3 -0.3 1.5
9 2.5 -0.3 1.3
10 2.7 -0.4 1.2
Media 2.70 0.07 1.48
Desv. Est. 0.58 0.34 0.26
Al graficar los datos de la tabla se obtiene:
Figura 4-10: Dispersión de resultados de la prueba 7
La figura 4-10 muestra la dispersión de la posición final de ambas ruedas laterales derechas.
El punto deseado para la rueda lateral derecha trasera es (0,0) y el punto deseado para la
rueda lateral derecha delantera es (27,0)
-1 -0.5 0 0.5 1 1.5 2 2.5
-3 2 7 12 17 22 27 32
E rr or e n e je y
Error en eje x
d1=10, d2=0
R. Trasera
Prueba 8
(d1=10cm, d2=10cm)
Tabla 4-8: Resultados de la prueba 8
d1=10,d2=10
Prueba delta X(cm) deltaY1(cm) deltaY2(cm)
1 2.7 0.1 1.1
2 3.5 0.2 1.5
3 3.7 -0.2 1.3
4 3.7 -0.8 1
5 2.8 0 1.4
6 2.6 -0.6 1.1
7 3.8 -0.6 1.2
8 3 -0.4 1.2
9 4.3 -1 0.9
10 4 -0.6 1.3
Media 3.41 -0.39 1.20
Desv. Est. 0.59 0.40 0.18
[image:52.595.48.560.127.667.2]Al graficar los datos de la tabla se obtiene:
Figura 4-11: Dispersión de resultados de la prueba 8
La figura 4-11 muestra la dispersión de la posición final de ambas ruedas laterales derechas.
El punto deseado para la rueda lateral derecha trasera es (0,0) y el punto deseado para la
rueda lateral derecha delantera es (27,0)
-1.5 -1 -0.5 0 0.5 1 1.5 2
-3 2 7 12 17 22 27 32
E rr or e n e je y
Error en eje x
d1=10, d2=10
R. Trasera
Prueba 9
[image:53.595.45.559.130.659.2](d1=10cm, d2=20cm)
Tabla 4-9: Resultados de la prueba 9
d1=10,d2=20
Prueba delta X(cm) deltaY1(cm) deltaY2(cm)
1 2.5 0.8 1.6
2 1.5 1.5 1.9
3 2.5 0.4 1.9
4 2.7 -0.1 1.1
5 2.8 -0.6 1
6 2.3 -0.2 1.3
7 3.3 -0.8 0.9
8 2.3 -0.3 1.3
9 2.7 -0.3 1.6
10 2.9 -0.3 1.5
Media 2.55 0.01 1.41
Desv. Est. 0.47 0.70 0.35
Al graficar los datos de la tabla se obtiene:
Figura 4-12: Dispersión de resultados de la prueba 9
La figura 4-12 muestra la dispersión de la posición final de ambas ruedas laterales derechas.
El punto deseado para la rueda lateral derecha trasera es (0,0) y el punto deseado para la
rueda lateral derecha delantera es (27,0)
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2 2.5 3
-3 2 7 12 17 22 27 32
E rr or e n e je y
Error en eje x
d1=10, d2=20
R. Trasera
OBSERVACIONES
-
En las gráficas, el punto (0,0) corresponde al punto deseado al que debe de llegar el
vehículo. Los valores que se muestran son el error de posición resultante del
proceso de estacionamiento.
-
En las gráficas, los errores de ambas ruedas comparten la misma abscisa. Esto se
debe a que la diferencia entre las ordenadas es muy pequeña en comparación con la
longitud del vehículo que es una constante, por lo que se puede asumir que la
distancia entre ambas ruedas es constante en el eje X
-
Las medidas se tomaron con una regla milimetrada por lo cual el error en las
medidas es de ± 0.5 mm
-
Igualmente existe la misma incertidumbre de error en el punto de partida del
vehículo.
CONCLUSIONES
-
Se implementó un vehículo de pruebas en el cual se pudieron controlar la tracción y
la dirección logrando con ello controlar su desplazamiento.
-
El vehículo logró correctamente comunicarse con una PC me manera bidireccional
ejecutando correctamente las órdenes dadas por esta.
-
Se desarrolló un programa para microcontrolador que permite el control de la
dirección y de la tracción del vehículo de pruebas.
-
Se corroboró el correcto funcionamiento del vehículo de pruebas haciendo uso de
un programa desarrollado para PC.
-
En las pruebas pudo observar que el error en la posición final de parqueo se
incrementa conforme el punto de inicio de la maniobra se encuentre más alejado de
la posición final del vehículo. Esto se debe a que el sistema no considera ningún
tipo de realimentación con respecto a su entorno.
-
Los errores en las repeticiones para una prueba específica, tienen cierta tendencia a
un valor fijo. Mediante modificaciones al programa se podría aplicar un factor de
corrección y así minimizar ese error.
-
Al ser automatizada la maniobra de parqueo se disminuye el riesgo de choques o
ralladuras producidas por el vehículo que se estaciona.
-
Al ser el parqueo del vehículo administrado por un sistema autónomo, este puede
evitar que los vehículos estacionen en zonas restringidas como las señales
peatonales.
RECOMENDACIONES
-
Es recomendable para este tipo de proyecto utilizar una plataforma mecánica (chasis
de auto) de mejor diseño. Si bien la utilizada es bastante buena, existe en el vehículo
utilizado
alrededor de 1 cm de “juego” en las ruedas de tracción que no es
controlable por el motor. Asimismo el sistema Ackerman del vehículo no está
perfectamente alineado por lo que produce también cierto grado de incertidumbre en
las pruebas.
-
Para la implementación de este proyecto sobre un vehículo real se recomienda
utilizar un protocolo de comunicaciones muy robusto ya que una instrucción mal
recibida o interpretada podría ocasionar un accidente.
BIBLIOGRAFÍA
[1] Is there a worldwide parking problem? Chris Summers. BBC News
http://www.bbc.co.uk/news/magazine-17271118 consulta: 14 septiembre 2012
[2] Car Parking
Health and Safety Executive www.hse.gov.uk/pubns/wpt09.pdf Consulta: septiembre 2012
[3]Adnan Shaout, Dominic Colella, S. Awad
“Advanced Driver Assistance Systems - Past, present and future”
Computer Engineering Conference (ICENCO), 2011 Seventh International
Print ISBN: 978-1-4673-0730-7
[4] Wada, M.; Yoon, K.; Hashimoto, H.; Matsuda, S.; Masuda, H.; , "Development of advanced parking assistance system," Intelligent Transportation Systems, 1 999. Proceedings. 1 999 IEEE/IEEJ/JSAI International Conference on , vol., no., pp.7 1 6-72 I , 1 999.
[5] www.autoescuela.tv/blog/el-radio-de-giro/
Consulta: septiembre 2012[6] Norris, William (1906).
"Steering". Modern Steam Road Wagons. Longmans. pp. 63–67. (ISBN:0715359096 / 0-7153-5909-6)
[7]Harald Naunheimer, Bernd Bertsche, Joachim Ryborz,
“Automotive Transmissions: Fundamentals, Selection, Design and Application”
Wolfgang Novak, ISBN: 978-3-642-16213-8 (Print) 978-3-642-16214-5 (Online), 2011
[8] http://conduser.com/ALISTAMIENTO12.htm Consulta: septiembre 2012
[9] http://www.robotplatform.com/knowledge/servo/servo_control_tutorial.html Consulta: septiembre 2012
[10] http://www.futaba-rc.com/servos/analog.html Consulta: septiembre 2012
[12] http://www.bluetooth.com/Pages/Bluetooth-Home.aspx Consulta: noviembre 2012
[13] http://www.oemblue.com/BTM45%20class1%20standard.html Consulta: noviembre 2012
[14] Tsung-hua Hsu, Jing-Fu Liu, Pen-Ning Yu, Wang-Shuan Lee and Jia-Sing Hsu
“Development of an Automatic Parking System for Vehicle”
Automotive Research and Testing Center, Changhua County, Taiwan, R.O.C., 3-5 Sept. 2008
E-ISBN : 978-1-4244-1849-7
[15] Amorn Vorashompoo, Benjamas Panomruttanarug, Kohji Higuchi
“Bidirectional best first based autonomous parallel parking system”
Conference: International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology - ECTI-CON , 2011
[16] Tzuu-Hseng S. Liand Shih-Jie Chang
“Autonomous Fuzzy Parking Controlof a Car-Like Mobile Robot”
IEEE Transactions on systems, man, and cybernetics—part a: systems and humans, vol. 33, no. 4, july 2003 451
[17] Simon R. Blackburn,
“The Geometry of Perfect Parking”
Royal Holloway, University of London
ANEXOS:
Anexo: 1: Parque vehicular estimado en el Perú
Fuente: Ministerio de Transportes y comunicaciones
CLASE DE VEHICUL
O
2003 R/ 2004 R/ 2005 R/ 2006 R/ 2007 R/ 2008 R/ 2009 2010 2011
TOTAL 1,342,288 1,361,403 1,440,017 1,473,530 1,534,303 1,640,970 1,732,834 1,849,690 1,979,865
AUTOMO
VIL 643,848 646,497 673,647 681,538 696,897 735,314 766,742 809,967 860,366
STATION
WAGON 197,700 209,908 227,338 237,562 250,979 261,441 274,566 285,300 289,649
CMTA.
PICK UP 155,251 155,951 165,875 168,756 176,111 187,940 196,833 210,988 228,321
CMTA.
RURAL 126,391 129,077 137,941 146,434 159,829 184,328 207,067 235,889 272,596
CMTA.
PANEL 23,515 24,930 26,850 28,177 29,684 32,498 34,172 36,184 37,847
OMNIBUS 46,198 45,851 47,788 47,873 48,542 49,882 51,563 54,389 56,704
CAMION 109,862 109,019 115,576 116,485 120,661 129,295 137,407 147,293 158,939
REMOLCAD
OR 17,107 17,282 17,602 18,319 20,872 24,890 26,457 28,679 30,779
consists of:
Gearhead GS 16 A Ø16 mm, 0.015 - 0.04 Nm
Part number 144410
A-max 16 Ø16 mm, Precious Metal Brushes CLL, 1.2 Watt, CE approved, with terminals
Part number 110054
Encoder MR, Typ M, 32 Counts per turn, 2 Channels
Part number 201935
Your Contact
maxon motor worldwide
http://www.maxonmotor.com:80/maxon/view/content/contact_page
E-Mail: [email protected]
Internet: http://www.maxonmotor.com:80
retail price:
1-4 units CHF 153.80 5-19 units CHF 134.90 20-49 units CHF 115.00
Artikelnummer 144410
General information
Gear Art GS
Outer diameter 12 mm
Gear variant A
Gearhead Data
Reduction 12 : 1
Reduction absolute 961/81
Max. motor shaft diameter 1 mm
Number of stages 2
Max. continuous torque 0.015 Nm
Intermittently permissible torque at gear output 0.1 Nm
Sense of rotation drive to output =
Max. efficiency 81 %
Weight 9 g
Average backlash no load 1 °
Mass inertia 0.0032 gcm²
Gearhead length (L1) 11.8 mm
Max. transferable continuous performance 1 W
Max. transferable short-time performance 7 W
Technical Data
Radial play max. 0.15 mm, 6 mm from flange
Axial play 0.02 - 0.12 mm
Max. radial load 2 N, 6.5 mm from flange
Max. axial load (dynamic) 2 N
Max. permissible force for press fits 30 N
Recommended input speed 8000 min-1
Max. short-time input speed 8000 min-1
Recommended temperature range -15...+100 °C
Extended temperature range -40...+100 °C
Number of autoclave cycles 0
Product
Artikelnummer 110054
Values at nominal voltage
Supply voltage 7.2 V
No load speed 9740 min-1
No load current 14.7 mA
Nominal speed 4200 min-1
Nominal torque (max. continuous torque) 2.17 mNm
Nominal current (max. continuous current) 0.327 A
Stall torque 3.86 mNm
Starting current 0.561 A
Max. efficiency 71 %
Characteristics
Terminal resistance 12.8
Terminal inductance 0.467 mH
Torque constant 6.88 mNm A-1
Speed constant 1390 min-1
V-1
Speed / torque gradient 2590 min-1
mNm-1
Mechanical time constant 23.3 ms
Rotor inertia 0.857 gcm²
Thermal data
Thermal resistance housing-ambient 29.8 KW-1
Thermal resistance winding-housing 5.5 KW-1
Thermal time constant winding 3.51 s
Thermal time constant motor 165 s
Ambient temperature -30...+65 °C
Max. permissible winding temperature +85 °C
Mechanical data
Bearer Type sleeve bearing
Max. permissible speed 11000 min-1
Axial play 0.05 - 0.15 mm
Radial play 0.012 mm
Max. axial load (dynamic) 0.8 N
Max. force for press fits (static) 35 N
(static, shaft supported) 280 N
Max. radial loading 1.4 N, 5 mm from flange
Other specifications
Number of pole pairs 1
Number of commutator segments 7
Direction of rotation Clockwise (CW)
Number of autoclave cycles 0
Product
Program A-max 16 EB
Encoder MR, Typ M, 32 Counts per turn, 2 Channels
Artikelnummer 201935
General information
Counts per turn 32
Number of channels 2
Line Driver No
Max. speed 15000 min-1
Technical Data
Supply voltage Vcc 2.7...5.5 V
Driver used logic TTL
Output current per channel 0...5 mA
Phase shift 90 °e
Phase shift, inaccuracy 45 °e
Index synchronized to AB No
Max. moment of interia of code wheel 0.1 gcm²
Operating temperature -25...+85 °C
Product
Program 32IMP 2K 32P TTL
Nov 27, 2012 / Subject to change Page 4 of 4
![Figura 3-1: Componentes de velocidad de las ruedas al momento del giro[5].](https://thumb-us.123doks.com/thumbv2/123dok_es/2412659.16313/10.595.128.495.101.466/figura-componentes-velocidad-ruedas-momento-giro.webp)


![Tabla 3-1: Características del servomotor S9402 [10]](https://thumb-us.123doks.com/thumbv2/123dok_es/2412659.16313/17.595.123.524.210.507/tabla-caracteristicas-servomotor-s.webp)
![Figura 3-10: Servo marca Futaba, modelo S9402 [10]](https://thumb-us.123doks.com/thumbv2/123dok_es/2412659.16313/18.595.100.504.155.414/figura-servo-marca-futaba-modelo-s.webp)