Por medio de la presente hago constar que soy autor y titular de la obra
denominada
, en los sucesivo LA OBRA, en virtud de lo cual autorizo a el Instituto
Tecnológico y de Estudios Superiores de Monterrey (EL INSTITUTO) para que
efectúe la divulgación, publicación, comunicación pública, distribución,
distribución pública y reproducción, así como la digitalización de la misma, con
fines académicos o propios al objeto de EL INSTITUTO, dentro del círculo de la
comunidad del Tecnológico de Monterrey.
El Instituto se compromete a respetar en todo momento mi autoría y a
otorgarme el crédito correspondiente en todas las actividades mencionadas
anteriormente de la obra.
De la misma manera, manifiesto que el contenido académico, literario, la
edición y en general cualquier parte de LA OBRA son de mi entera
responsabilidad, por lo que deslindo a EL INSTITUTO por cualquier violación a
los derechos de autor y/o propiedad intelectual y/o cualquier responsabilidad
relacionada con la OBRA que cometa el suscrito frente a terceros.
Control Inteligente de un Aeroplano a Escala-Edición Única
Title
Control Inteligente de un Aeroplano a Escala-Edición
Única
Authors
Raymundo Magaña Gómez
Affiliation
Tecnológico de Monterrey, Campus Monterrey
Issue Date
2009-05-01
Item type
Tesis
Rights
Open Access
Downloaded
19-Jan-2017 00:24:18
INSTITUTO TECNOLÓGICO Y DE ESTUDIOS
SUPERIORES DE MONTERREY
CAMPUS MONTERREY
PROGRAMA DE GRADUADOS EN MECÁTRONICA Y
TECNOLOGÍAS DE INFORMACIÓN
TECNOLÓGICO
DE MONTERREY
®
CONTROL INTELIGENTE DE UN AEROPLANO A ESCALA
TESIS
PRESENTADA COMO REQUISITO PARCIAL
P A R A OBTENER EL GRADO ACADÉMICO DE:
MAESTRO EN CIENCIAS
CON ESPECIALIDAD EN AUTOMATIZACIÓN
POR:
RAYMUNDO MAGAÑA GÓMEZ
C A M P U S M O N T E R R E Y
P R O G R A M A DE GRADUADOS EN MECATRÓNICA Y TECNOLOGÍAS DE INFORMACIÓN
CONTROL INTELIGENTE DE UN AEROPLANO A ESCALA
TESIS
PRESENTADA C O M O REQUISITO PARCIAL PARA OBTENER EL G R A D O ACADÉMICO DE:
M A E S T R O EN CIENCIAS CON ESPECIALIDAD EN AUTOMATIZACIÓN
POR:
RAYMUNDO MAGAÑA GÓMEZ
M O N T E R R E Y , NUEVO LEÓN, MÉXICO M A Y O 2009
TECNOLÓGICO
I N S T I T U T O T E C N O L Ó G I C O Y D E E S T U D I O S S U P E R I O R E S D E M O N T E R R E Y C A M P U S M O N T E R R E Y
D I V I S I Ó N D E M E C A T R Ó N I C A Y T E C N O L O G Í A S D E I N F O R M A C I Ó N P R O G R A M A D E G R A D U A D O S E N M E C A T R Ó N I C A Y T E C N O L O G Í A S
D E I N F O R M A C I Ó N
Los miembros del comité de tesis recomendamos que la presente tesis del Ing. Raymundo Magaña Gómez sea aceptada como requisito parcial para obtener el grado académico de Maestro en Ciencias con Especialidad en Automatización.
Dr. Arturo Galván
Sinodal
C o m i t é de Tesis:
Dr. Rogelio Soto Asesor
Dr. Ricardo Ramírez Co-Asesor
Dr. Joaquín Acevedo Mascarúa Director de Investigación y Posgrado
Escuela de Ingeniería
POR:
RAYMUNDO MAGAÑA GÓMEZ
TESIS
Presentada al Programa de Graduados en Mecatrónica y
Tecnologías de Información
Este trabajo es requisito parcial para obtener el grado de Maestro
en Ciencias con Especialidad en Automatización
I N S T I T U T O TECNOLÓGICO Y D E ESTUDIOS
SUPERIORES DE M O N T E R R E Y
A g r a d e c i m i e n t o s
A mi familia, que siempre está conmigo cuando la necesito. Por tener confianza en mi y en mis proyectos.
A mi asesor de tesis el Dr. Soto por haberme dado la oportunidad de trabajar en este proyecto, por apoyarme durante toda mi maestría y por impulsarme a aprender.
A mis sinodales, el Dr. Ricardo Ramírez y el Dr. Arturo Galván, por guiarme de forma constructiva durante el desarrollo de mi tesis.
A mis amigos, Martha, Pedro, Enrique, Isaías, Javier, Jesús y Rocío, por su amistad que me ayudó en los tiempos más difíciles y por su apoyo incondicional.
A Luis Carlos y Daniel, por compartir conmigo la frustración de muchos proyectos y ayudarme a poner en perspectiva el conocimiento adquirido en este tiempo.
A mis compañeros que compartieron conmigo las desveladas y los proyectos. Por todos los buenos tiempos que pasamos juntos trabajando en el laboratorio.
II
Dedicatoria
A mis padres, que me apoyaron en todo y me dieron la oportunidad de cumplir mis sueños. Porque gracias a su ejemplo y cariño logré llegar a mi meta.
Resumen
Esta investigación es realizada como requisito para la obtención del grado Maestro en Ciencias con especialidad en Automatización y como resultado de la misma se pretende obten-er un controlador de altura, por medio del control del ángulo de cabeceo (pitch) de un aobten-ero- aero-plano en miniatura o a escala utilizando tres técnicas en forma conjunta, las cuales son lógica difusa (LD), redes neuronales (RN) y algoritmos genéticos ( A G ) . El diseño de controladores óptimos, robustos y seguros para aeroplanos puede ser un problema complejo de resolver de-bido a la cantidad de variables del sistema y a su no-linealidad, por lo que se requiere de personal muy capacitado y de tiempos de desarrollo prolongados.
Índice general
1. Introducción 1
1.1. Motivación de la investigación 1 1.2. Definición del Problema 3 1.3. Plataforma de desarrollo: VANT 5
1.4. Esquema de la tesis 6 1.5. Contribuciones 6
2. Antecedentes 8
2.1. Dinámica del aeroplano 8 2.1.1. Marco de referencia 9 2.1.2. Sistemas de ecuaciones 11 2.1.3. Dinámica longitudinal 12 2.1.4. Fuerzas de Elevación y Arrastre 14
2.1.5. Coeficientes de Elevación y Arrastre 15
2.2. Modelos de turbulencia de viento 18 2.2.1. Modelo de Von Kármán 20 2.2.2. Modelo de viento cortante 21
2.3. Control Difuso 22 2.4. Redes neuronales 24
2.4.1. Fundamentos de redes neuronales 25 2.4.2. Redes neuronales basadas en la función base radial 26
2.5. Algoritmos genéticos 27 2.6. Trabajos relacionados 29
2.6.1. Controladores Difusos y Neuro-Difusos sintonizados con AG 29
3. Diseño y Sintonización del Controlador 32
3.1. Introducción 32 3.2. Lazo interno de control 33
3.2.1. Controlador Neuro-Difuso basado en FBR 33
3.2.2. Sintonización del controlador 37 3.2.3. Función de desempeño 40 3.3. Lazo de control de altura 41
4. Resultados y Conclusiones 42
4.1. Características de vuelo 42 4.1.1. Especificaciones de periodo corto 42
4.2. Resultados de las pruebas al controlador neuro-difuso 44 4.2.1. Seguimiento de referencia del controlador neuro-difuso sin perturbaciones 44
4.2.2. Seguimiento de referencia del controlador neuro-difuso con perturbaciones 45
4.3. Pruebas del controlador PID de altura 46 4.3.1. Seguimiento de referencia del controlador PID de altura sin perturbaciones 47
4.3.2. Seguimiento de referencia del controlador PID de altura con
perturba-ciones 47 4.4. Conclusiones y trabajo futuro 48
4.4.1. Sistema de control 48 4.4.2. Técnica de sintonización 49 4.4.3. Modelo del aeroplano 49
4.5. Trabajo a futuro 50
Bibliografía 52 A . Figuras del capítulo 4: Controlador NeuroDifuso 55
Í N D I C E G E N E R A L VI D . Parámetros del controlador neurodifuso 77
E. Controlador NeuroDifuso en Matlab Simulink (Función S) 80
2.1. Nomenclatura para los marcos de referencia 9
2.2. Números de Reynolds utilizados 16
2.3. Valor de la constante Z0 22
3.1. Parámetros del controlador Neuro-Difuso basado en FBR 37
3.2. Cromosoma utilizado en el AG 38 3.3. Sintonización del PID del lazo de altura 41
4.1. Clases de aeroplanos según el estándar MIL-F-8785C 43 4.2. Fases de vuelo según el estándar MIL-F-8785C 43 4.3. Nivel de las características de vuelo según el estándar MIL-F-8785C 43
4.4. Límites de la relación de amortiguación del modo de periodo corto 44 4.5. Valores de IAE para las pruebas de controlador neuro-difuso 46 4.6. Valores de IAE para las pruebas de controlador PID de altura 48
C.l. Parámetros del VANT 76
Índice de figuras
1.1. Altura del centro de gravedad 3
2.1. Ejes del marco de referencia de la aeronave y los ángulos aerodinámicos . . . 9
2.2. Marcos de referencia utilizados 10
2.3. Superficies de control 11 2.4. Diagrama de cuerpo libre del aeroplano 13
2.5. Curva de a contra CLW 17
2.6. Curva de CLW contra CDW 17
2.7. Curva de a contra CDW 18
2.8. Curva de a contra CLE contra Se 19
2.9. Curva de a contra CDE contra Se 19
2.10. Estructura de un controlador de lógica difusa 23
2.11. Función en la capa oculta de la red neuronal 27
3.1. Lazo de control de altura implementado 32 3.2. Diagrama representativo del modelo a implementarse 34
3.3. Controlador neuro-difuso basado en funciones de base radial 35 3.4. Controlador neuro-difuso de ángulo de cabeceo con 2 variables de entrada . . 36
3.5. Tasa de mutación e intercambio de genes 39
A . l . Respuesta al escalón del ángulo de cabeceo 9 55
A.2. Variable manipulada, la ampliación de esta y la altura de la respuesta al escalón
de θ 56 A.3. Respuesta al escalón del ángulo de cabeceo 9 cuando la planta tiene error de
modelación 57
A.4. Variable manipulada y altura de la respuesta al escalón de 9 cuando la planta
tiene error de modelación 58 A.5. Seguimiento de una señal senoidal como referencia de 9 59
A.6. Variable manipulada y altura del seguimiento de una señal senoidal como
ref-erencia de 8 60
A.7. Respuesta al escalón del ángulo de cabeceo 9 cuando la planta tiene
pertur-bación de viento 61 A.8. Variable manipulada y altura de la respuesta al escalón de 9 cuando la planta
tiene perturbación de viento 62 A.9. Seguimiento de una señal senoidal como referencia de 9 cuando la planta tiene
perturbación de viento 63 A. 10.Variable manipulada y altura del seguimiento de una señal senoidal como
ref-erencia de 9 cuando la planta tiene perturbación de viento 64 A.11.Respuesta al escalón del ángulo de cabeceo 9 cuando la planta tiene
pertur-bación de viento y se incluye la modelación del actuador 65 A.12.Variable manipulada y altura de la respuesta al escalón de 9 cuando la planta
tiene perturbación de viento y se incluye la modelación del actuador 66
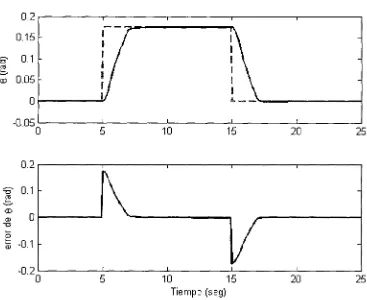
B.l. Respuesta al escalón de Ze 67
B.2. 9 y el error de 9 de la respuesta al escalón de Ze 68
B.3. Variable manipulada de la respuesta al escalón de Ze 68
B.4. Controlador de Ze en seguimiento de una señal senoidal 69
B.5. 9 y el error de 9 del seguimiento realizado por el controlador Ze de una señal
senoidal 70 B.6. Variable manipulada del seguimiento realizado por el controlador Ze de una
señal senoidal 70 B.7. Respuesta al escalón de la altura Ze cuando la planta sufre de perturbación de
viento 71
B.8. θ y el error de θ de la respuesta al escalón de θ cuando ˇa planta sufre de
Í N D I C E D E F I G U R A S x
B.9. Variable manipulada de la respuesta al escalón de 9 cuando la planta sufre de
perturbación de viento 73 B.10.Controlador de Ze en seguimiento de una señal senoidal cuando la planta tiene
perturbación de viento 74
B.11.θ y el error de θ del seguimiento realizado por el controlador Ze de una señal
senoidal cuando la planta tiene perturbación de viento 75 B.12.Variable manipulada del seguimiento realizado por el controlador Ze de una
señal senoidal cuando la planta tiene perturbación de viento 75
D.l. Funciones de membresía del error 77 D.2. Funciones de membresía de la derivada del error 78
D.3. Funciones de membresía de la velocidad 78 D.4. Sub-controlador para función de membresía de velocidad 1 78
Capítulo
1.1. Motivación de la investigación
El desarrollo de vehículos aéreos no tripulados (UAV por sus siglas en inglés) ha au-mentado considerablemente en los últimos años gracias al esfuerzo en el desarrollo de nuevas técnicas de inteligencia computacional (IC). Para el correcto funcionamiento de los vehículos aéreos no tripulados es necesaria la implementación de controladores robustos de múltiples entradas y múltiples salidas MIMO que puedan seguir los valores de los parámetros que con-trola el sistema de navegación, sin importar los cambios que se presentan en los diferentes rangos de operación.
Debido a la complejidad y a la cantidad de variables del modelo de una aeronave, in-cluso en los modelos linealizados, la solución al problema de control no tiene una respuesta óptima, robusta y de fácil implementación en cualquier plataforma. Adicionalmente, la im-plementación técnica de controladores basados en técnicas de control tradicionales presenta en muchos casos un esfuerzo computacional muy grande que no permite el control en tiempo real cuando se desea implementar en los microprocesadores de plataformas aéreas de pequeña escala.
La lógica difusa tiene la capacidad de manejar información imprecisa a través de vari-ables ling٧ísticas, como lo menciona Zadeh [31]. Esta habilidad puede ser complementada con
1
Introducción
1.1. Motivación de la investigación 2
otras técnicas que tienen la capacidad de aprender para desarrollar controladores inteligentes que busquen los parámetros que obtienen el mejor desempeño posible de la planta. Las redes neuronales de capas múltiples son utilizadas para la aproximación funciones en aplicaciones como identificación y predicción de sistemas dinámicos no-lineales, control e identificación de patrones. La implementación en sistemas físicos de este tipo de redes neuronales es difícil debido a la lenta convergencia del algoritmo de retropropagación que se utiliza comúnmente. Una alternativa propuesta por Powell et al. [20] es la función base radial (RBF), ya que tiene una velocidad de convergencia rápida en comparación con el algoritmo de retropropagación, debido a que una función arbitraria puede ser aproximada por la combinación lineal de fun-ciones base factorizables sintonizadas localmente. Debido a la similitud computacional de los sistemas difusos y las redes neuronales de función base radial, esta combinación ha sido uti-lizada como base para muchos sistemas difusos adaptivos, como el propuesto por Katayama et al. [9].
Otra técnica de inteligencia computacional que ha sido utilizada con mucho éxito es la de los algoritmos genéticos. Esta técnica se basa en la supervivencia darwiniana del más apto en la evolución natural, como lo mencionan Davis [2] y Goldberg [5]. Esta técnica ha probado ser efectiva en espacios de búsqueda complejos, que pueden ser multi-modales y altamente no lineales.
Los sistemas de control para aeronaves son en la mayoría de los casos difíciles de diseñar debido a la cantidad de variables del sistema, a su no linealidad y complejidad matemática, como menciona Franklin et al. [4]. Es de especial importancia el control de la altura en un aeroplano debido a las características que requiere el sistema de control. En la figura 1.1 se muestra el plano X - Z , en donde se puede observar la variable de, interés para el problema de control, la altura del centro de gravedad Ze, la cual está referenciada al marco de referencia
[image:21.612.187.419.300.553.2]de la tierra plana.
Figura 1.1: Altura del centro de gravedad respecto al marco de referencia, la variable de interés para el problema de control
1.2. Definición del Problema 4
necesarias normalmente para obtener resultados óptimos. En comparación con otras variables a controlar, la altura no requiere de características dinámicas específicas para la comodidad del piloto, ya que el propósito del controlador de altura es sustituir al piloto en la tarea de mantener la altura deseada.
La utilización de técnicas convencionales de control, como la retroalimentación y es-timación de estados, requiere de esfuerzos computacionales grandes para la obtención de resultados satisfactorios en el control, por lo tanto, la utilización de un controlador inteligente que pueda trabajar con estas características y que además sea sencillo de sintonizar es de-seable. Debido a las muchas aplicaciones comerciales, privadas y militares de las aeronaves no tripuladas, el desarrollo de controladores eficientes que puedan ser implementados con un bajo costo es altamente relevante en la actualidad.
Los controladores difusos han demostrado ser de utilidad en aplicaciones no lineales y de alta complejidad matemática, como lo indica Nguyen et al. [17], pero desgraciadamente en muchos casos se requiere mucho tiempo para su sintonización, el cual sobrepasa la mayoría de las veces el tiempo que toma desarrollar un controlador convencional. Teo Lian et al. [11] men-ciona en su trabajo que para eliminar esta limitante de los controladores difusos se pueden utilizar redes neuronales y / o algoritmos genéticos que permitan encontrar los parámetros óptimos del controlador en periodos cortos de tiempo, facilitando así su implementación.
Debido a que la sintonización de los parámetros del controlador neuro-difuso en forma simultánea requiere de un gran esfuerzo computacional, este proceso se realiza fuera de línea. Una vez sintonizado el controlador, el poder computacional requerido para su implementación es mucho menor debido a la similitud computacional y estructural de los sistemas difusos y las redes neuronales basadas en la función base radial [11].
es-directo de la altura puede ser inestable. Esto se debe a que si no se cuida el ángulo de el-evación, las acciones de control de un controlador de altura pueden llevar a la aeronave a sobrepasar su ángulo de ataque máximo. El modelo propuesto fue desarrollado con la ayuda de diferentes paquetes de modelación, como Matlab y Simulink.
Para lograr los objetivos de investigación de esta tesis fue necesario seguir una metodología definida, la cual se puede dividir en las siguientes áreas:
• Investigación bibliográfica sobre los controladores difusos [13] [31], los neuro-difusos basa-dos en redes neuronales de función base radial (RBF) [17] [11] [23] y sobre los algoritmos genéticos y su implementación en la sintonización de controladores neuro-difusos [19] [11].
• Investigación del modelo matemático no-lineal del aeroplano, así como de las considera-ciones necesarias para realizar la simulación de un avión a escala. En este punto es de particular interés el estudio de los aeroplanos tipo Cessna.
• Obtención de una función de desempeño para la evaluación de la evolución de los parámetros obtenidos por el algoritmo genético.
• Desarrollo y simulación del sistema propuesto en Simulink.
• Comparación del desempeño del controlador propuesto contra un controlador conven-cional.
1
.3.
Plataforma de desarrollo: V A N T
El VANT (Vehículo Aéreo No-Tripulado) es una plataforma de pruebas desarrollada en el ITESM como parte de la investigación de vehículos no tripulados del instituto. En la actu-alidad se trabaja con la 3era versión de esta plataforma de pruebas, la cual está basada en el aeroplano Kadett Sr., el cual está disponible comercialmente.
El VANT cuenta con un procesador AMD Geode LX800 como unidad de procesamiento
1.4. Esquema de la tesis 6
respecto a plataformas de pruebas que utilizan microcontroladores y acelerómetros indepen-dientes para el procesamiento y sensado. El objetivo principal del proyecto es crear una flota de aeronaves no tripuladas que permitan aplicar prácticamente las teorías desarrolladas por los investigadores de otros temas relacionados, como la cooperación de múltiples vehículos no tripulados.
1.4. Esquema de la tesis
El capítulo 2 presenta la teoría fundamental sobre la cual se construye este trabajo. Primeramente se introduce el modelo de la dinámica longitudinal desacoplada del aeroplano. En esta sección se presentan las condiciones de la simplificación mencionada y su rango de validez. En las secciones posteriores se presenta la teoría de sistemas difusos y de las redes neuronales, las cuales son unidas para formar un controlador neuro-difuso, el cual se discute en el siguiente capítulo. La tercera técnica de inteligencia computacional presentada en el capítulo es la de los algoritmos genéticos, los cuales son utilizados en este trabajo para sin-tonizar el controlador y así reducir el tiempo de desarrollo del sistema de control. Por último se discuten los trabajos relacionados a esta tesis, tanto en el campo aeroespacial, como en el área de inteligencia computacional.
En el capítulo 3 se plantea la solución al problema de control y se describe el fun-cionamiento del controlador implementado para resolver dicho problema. También se cubren los métodos utilizados para la sintonización del controlador de múltiples entradas. Por últi-mo, en el capítulo 4 se describen las pruebas realizadas, así como el modelo de perturbación utilizado y los parámetros de desempeño obtenidos del lazo de control, los cuales son com-parados con el estándar MIL-F-8785C [27].
1.5. Contribuciones
los parámetros del estándar MILF8785C por medio de un controlador neurodifuso.
Capítulo
Antecedentes
En este capítulo se introducen las ecuaciones que representan la dinámica del aeroplano, así como la teoría fundamental sobre las técnicas de inteligencia computacional utilizadas en el presente trabajo. En la sección 2.1 se presentan las ecuaciones del modelo dinámico longitu dinal desacoplado para un aeroplano, y posteriormente se presenta las ecuaciones y tablas de datos requeridas para calcular las fuerzas de arrastre y elevación en las alas y elevadores. Los conceptos de lógica difusa, redes neuronales y algoritmos genéticos son discutidos en la sec ción 2.2, 2.3 y 2.4 respectivamente. La combinación de la lógica difusa y las redes neuronales en un controlador neurodifuso es presentada en la sección 2.5. Por último, se mencionan los diferentes esfuerzos que han sido realizados en trabajos de investigación similares al presente.
2.1. Dinámica del aeroplano
El análisis de la dinámica de vuelo de un aeroplano se puede dividir en dos apartados, la dinámica longitudinal y la lateral. En las ecuaciones de la dinámica longitudinal se analiza la traslación en el eje geográficamente vertical, el ángulo de elevación y su derivada, mientras que las ecuaciones de la dinámica lateral permiten obtener las rotaciones respecto a los ejes Y y Z y el ángulo de deslizamiento lateral.
Un sistema de ecuaciones para representar la dinámica de un aeroplano puede ser repre sentado en diferentes marcos de referencia, lo que afecta las variables observadas y la repre sentación del sistema. Para establecer el marco de referencia adecuado es necesario observar las variables de interés en la simulación, lo que nos permite seleccionar un sistema de refer encia que no requiera transformaciones adicionales para el cálculo de las variables a controlar.
En la literatura se encuentran diferentes subíndices y superíndices para indicar los mar cos de referencia, por este motivo se presenta la tabla 2.1 con el resumen de la nomenclatura de referencia comúnmente utilizada. Adicionalmente, en la figura 2.1 se presenta la definición de los ejes del marco de referencia que se encuentran sobre el cuerpo del aeroplano y los ángulos aerodinámicos, lo cual permite observar el marco de referencia más apropiado para la simulación de este sistema.
s Marco de referencia de estabilidad
w Marco de referencia del viento relativo
b Marco de referencia del cuerpo de la aeronave e Marco de referencia de la tierra
Cuadro 2.1: Nomenclatura para los marcos de referencia
2.1. Dinámica del aeroplano 10 Como se puede observar en la figura 2.1 el marco de referencia más apropiado para el trabajo en cuestión es el del cuerpo de la aeronave. Adicionalmente se requiere un marco de referencia basado en tierra para poder calcular la trayectoria del aeroplano y así formar un sistema de control que siga una trayectoria deseada. El marco de referencia de cuerpo fijo uti liza los ejes del cuerpo del avión como referencia, las variables Xf, y Z\ˇ para posición, además de U y w para indicar la velocidad en los ejes x y z respectivamente. El sistema de referencia a tierra, llamado marco de referencia de tierra plana, utiliza las variables Xe y Ze para represen
tar el desplazamiento en los ejes de la tierra. En este marco de referencia Ue y we representan
las velocidades en x y z. La figura 2.2 muestra los marcos de referencia a utilizarse, además de definir los ángulos aerodinámicos correspondientes en base a estos sistemas de coordenadas.
Una vez definidos los marcos de referencia con los que se trabajará es necesario establecer las ecuaciones que permiten la conversión entre estos sistemas, ya que las ecuaciones de la dinámica longitudinal tienen referencia al marco de cuerpo fijo, mientras que las variables de trayectoria están en el sistema de coordenadas de tierra plana. Las ecuaciones 2.1 permiten hacer la conversión entre los marcos de referencia.
Figura 2.2: Marcos de referencia utilizados
UE = ˇ7cos(0) + wsin(0)
WE = U sin(6>) — u;cos(#)
La combinación de los modelos de fuerza aerodinámica y de momentos nos permiten obtener un modelo de aeronave para simulaciones y análisis. Para simplificar lo anterior se utilizan las ecuaciones de movimiento que suponen una tierra
plana.
Esta suposición es posi ble debido al rango de velocidades que puede alcanzar el VANT y por lo tanto no es necesario incluir la curvatura de la tierra en el sistema de ecuaciones.La figura 2.3 muestra la posición de las superficies de control en una aeronave conven cional de ala fija, como lo es el VANT, el cual se simula en este trabajo. Como variable manipulada para controlar el ángulo de cabeceo y consecuentemente la altura se utiliza la superficie del elevador. Las demás superficies de control se mantienen en valores constantes respecto a la condición de vuelo especificada.
Al seleccionar el sistema de ecuaciones para la simulación del VANT se tomaron en cuenta las características de la aeronave, las condiciones de vuelo a simularse y los datos disponibles sobre el prototipo a simularse. De entre los sistemas de ecuaciones nolineales
[image:29.612.152.430.374.597.2]2.1. Dinámica del aeroplano 12 para simulación de aeronaves se pueden distinguir dos grupos principales, los de 6 grados de libertad y los de 3 grados de libertad. Los sistemas de ecuaciones de 6 grados de libertad representan los movimientos longitudinal y lateral acoplados, mientras que los sistemas de 3 grados de libertad desacoplan las dinámicas bajo ciertas condiciones específicas, lo que per mite trabajar con menos parámetros de simulación.
El objetivo de este trabajo es controlar la altura (Ze) y el ángulo de cabeceo 9, en condi
ciones de vuelo que permiten desacoplar la dinámica longitudinal de la lateral, por lo tanto se justifica la utilización de un modelo de 3 grados de libertad.
Para justificar la selección del modelo del aeroplano de 3 grados de libertad se requieren las siguientes suposiciones,
• El ángulo de alabeo (f> es 0, y por lo tanto 9 = q
• (3 es despreciable
• El vuelo se realiza con las alas niveladas
• La ecuación del momento de cabeceo no está acoplada con las ecuaciones de los mo-mentos de alabeo y guiñada, y por lo tanto lyyq = M
2 . 1 . 3 . D i n á m i c a longitudinal
Para modelar el aeronave se requiere de una suma de fuerzas en los ejes de interés y una suma de momentos. En la figura 2.4 se observa el diagrama de cuerpo libre y las fuerzas que influyen la dinámica del sistema [25] [21] [29],
Del diagrama de cuerpo libre se pueden obtener las sumatorias de fuerzas en los ejes x y z respectivamente,
mil = Fx — mqw — mgsm(9) (2.2)
Figura 2.4: Diagrama de cuerpo libre del aeroplano
Donde m es la masa del avión, Fx es la suma de fuerzas empuje y de arrastre sobre las
alas y los elevadores, 9 es el ángulo de cabeceo, q es la velocidad angular y Fz es la sumatoria
de fuerzas de elevación. Para completar el sistema de ecuaciones se requiere de la ecuación de momento la cual se muestra a continuación,
En donde M es la sumatoria de momentos en el centro de gravedad e Jyy es el momento de inercia del avión respecto al eje Y. Para completar la modelación se requiere definir Fx,
Fz y M, por lo que se presentan en el siguiente grupo de ecuaciones.
FX = T D W D E (2.5)
(2.6)
M = XWLW + XELLE (2.7)
Las ecuaciones de Fx, Fz y M son introducidas en 2.2, 2.3 y 2.4 respectivamente para
obtener el sistema de ecuaciones de 3 grados de libertad.
2.1. Dinámica del aeroplano 14
(
TDwDE)
— qw — gs\n{6) (2.8)x =
mz
(
—Lw
— LEm
)
+ qU + gcos(9) (2.9)e
—Ly/Xw
+ LEXELIYY
(2.10)
En este modelo se realiza la suposición de que solamente las alas y los elevadores influyen en la dinámica del sistema.
2 . 1 . 4 . Fuerzas de Elevación y Arrastre
Para determinar si es necesario utilizar un modelo complejo basado en lecturas de un túnel de viento de los coeficientes relacionados con las fuerzas de elevación y arrastre se analizan las condiciones de vuelo y el tipo de maniobras que se simularán con un modelo determinado [25]. La mayoría de las aeronaves están restringidas a condiciones de vuelo con ángulos de ataque y números Mach pequeńos. Gracias a los simuladores de perfiles aerodinámi cos disponibles, se pueden modelar con gran precisión las fuerzas de elevación y arrastre que se tienen en el modelo ( L w , LE, DW y DE, en donde los subíndices indican si la fuerza se encuentra en las alas w o en el elevador E) •
El valor de las fuerzas de arrastre y levantamiento es función de la velocidad de vuelo, la densidad del aire, la superficie alar y los coeficientes de arrastre y elevación, / ( p o o Voo, S,C)
[24]. Las aeronaves propulsadas por motores a reacción sufren de deformaciones en su super ficie alar S causadas por esfuerzo generado por la fricción del aire sobre la superficie de la aeronave, pero ya que la velocidad máxima que alcanza el VANT no es suficiente para que este fenómeno sea considerable, la variación de la superficie alar S se considera despreciable en este trabajo. Debido a que la variación de la densidad es muy pequeńa, es posible tomarla como constante. La densidad del aire se puede tomar a un valor constante de 1.1 ^ / m 3 t^L
Debido a que los coeficientes de arrastre y levantamiento dependen del perfil del ala, de la densidad del aire, del número de Reynolds, de la velocidad Mach y del ángulo de ataque, se requiere caracterizar sus valores con curvas obtenidas de datos de un túnel de viento o con ayuda de un programa de simulación de perfiles aerodinámicos. De forma general, la función de un coeficiente de arrastre o elevación se puede representar de la siguiente forma,
Ce = f (Re, Ai, p, a, Se) (2.18)
Cw — f (Re, M, p , a) (2.19)
En este trabajo se utiliza un número de Reynolds, poo y Mach constante, mientras que a y 5e son variables. El número Mach se calcula en base a la velocidad del sonido, la
Dw = \pooVlSwCDW (2.11)
DE = \pooVlSECDE (2.12)
Ł w = ^POOV^SWCLW (213)
L Ł = ^ o c V ż ^ CLŁ (2.14)
estas ecuaciones se pueden sustituir en 2.8, 2.9 y 2.10, obteniendo como resultado,
ż = (hp°°v2,s
wc
Lw
I f a O ^ j
+ í Ł / +^
c o g ( 0 ) ( 2 J 6 )y = (í ••!•')
i y y
2.1. Dinámica del aeroplano 16 cual se puede aproximar con Vs = 1 2 2 4 ^ p . Si se toma el valor de = 1 2 0 ^ p , entonces
M = p?^ = « 0 , 1 . El número de Reynolds se calcula utilizando la fórmula,
Re = V x (2.20)
v
en donde V es la velocidad relativa en m/seg, i" es la longitud del cuerpo sólido e n m y i )
2
es la viscosidad cinemática del aire en — . La viscosidad cinemática del aire se puede asumir
seg r
constante y equivalente a 15 x 1 0 ~6
^ debajo de los 12,000 pies. Utilizando la fórmula 2.20, y los datos de la aeronave se obtuvieron los números de Reynolds para el ala principal y el elevador. Los resultados aparecen en la tabla 2.2.
Superficie Número de Reynolds ( ^ ) 2 Ala principal 811,000
Elevador 684,000
Cuadro 2.2: Números de Reynolds utilizados
Coeficientes del ala principal
Debido a que estos coeficientes sólo dependen del ángulo de ataque, es muy sencillo obtener sus curvas de caracterización. Para obtener las curvas de Ci y Cq se utilizó el pro grama Java Foil de Hepperle [7], el cual se encuentra disponible en línea y ha sido probado extensamente en la universidad de Stuttgart para validar los resultados que provee. El pro grama utiliza el método de análisis de capa límite y de flujo potencial para caracterizar los perfiles que son evaluados. Java Foil permite obtener gráficas de a contra C ż y Cp respec tivamente, las cuales pueden ser utilizadas en los modelos de simulación. El perfil analizado es el NACA2412 con un porcentaje de curvatura del 2 % , ya que corresponde con el perfil de ala que tiene el VANT. El resultado del análisis del perfil se muestra en las figuras 2.5 y 2.6.
2.2. Modelos de turbulencia de viento 18
Figura 2.7: Curva de a contra CDW
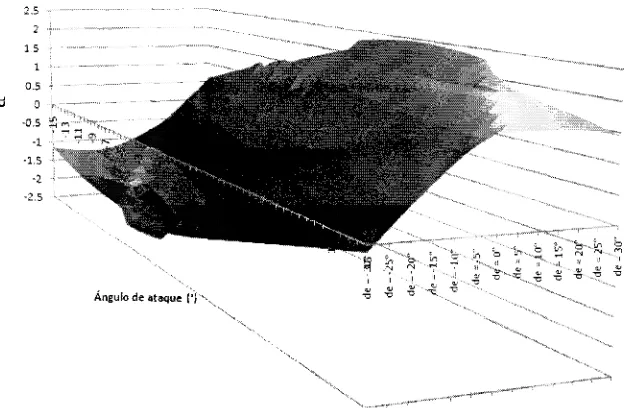
Coeficientes del elevador
La obtención de las curvas de CL y Crj para el elevador son más difíciles de obtener debido a que dependen del a y de la deflexión del elevador Se, y por lo tanto son curvas tridi
mensionales. Para resolver esta situación se calcularon los datos de la superficie del elevador en intervalos de 5o
desde 30° de deflexión hasta 30°. Los datos resultantes se integraron en una curva de tres dimensiones, lo cual permite observar el comportamiento de CLE y CDE en las figuras 2.8 y 2.9 respectivamente. Estos datos se ingresaron en un bloque de interpolación de 2 entradas para simular el comportamiento de los coeficientes aerodinámicos en el modelo dinámico del aeroplano.
2.2. Modelos de turbulencia de viento
Figura 2.9: Curva de a contra CDE contra 5e
[image:37.612.138.450.106.310.2]2.2. Modelos de turbulencia de viento 20
2.2.1.
Modelo de Von Kármán
La turbulencia de este modelo es generada pasando una seńal de ruido blanco de banda limitada a través de los filtros indicados en los estándares militares. Las funciones de las com ponentes espectrales de las velocidades $u( u ; ) ,
$q(u>)
y se observan en las ecuaciones2.21, 2.22 y 2.23 respectivamente [14].
* « H = ^ g- (2.21)
[l + (1,339L„Ł) ]
VLW 1 +
a2
wLw 1 + | ( 1 , 3 3 9 LW^ ) 2
^{UJ) • — ^ (2.23)
[l + ( 1 , 3 3 9 ^ ) ]
Donde au y aw representan las intensidades de turbulencia, L es la escala de la turbu
lencia, b es la longitud del ala, íl es la frecuencia espacial, V la velocidad relativa y a; la frecuencia circular, la cual se obtiene multiplicando V por íl.
El estándar militar indica que se debe de debe de pasar una seńal de ruido blanco con varianza unitaria a través de los siguientes filtros, los cuales son válidos para frecuencias in feriores a 50 rad.
H
u{s)
=
)UlJLA
v)
(2 24)1 + 1 , 3 5 7 ^ + 0,1987 ^ ) s2
H ÁS
) = t — r t v r •H
^ s
) (2
2 5
)
<W* • Ą ( 1
+ 2 , 7 4 7 8 ^ s + 0,3398 (ty) s2
Hw(s) = ^ 2 T~ (
226)
l + 2,9958^fs + 1,9754 ( ^ f ) s2 +
Lw — 762m. Cuando se está por debajo de 305 m de altura se requiere calcular la escala de
las turbulencias con las ecuaciones 2.27 y 2.28. En el intermedio entre 305 y 610 m se debe de interpolar linealmente entre los dos valores.
Lu = ° '
3
° m
04 (2.27)
(0,177 + 0,00025/i)0
'4 V
Lw = 0,3048/i (2.28)
En donde h representa la altura. La intensidad de turbulencia es otro valor que se debe de calcular para este modelo de turbulencia. Las ecuaciones 2.29 y 2.30 contienen las fórmulas necesarias para este cálculo.
ow = 0,1W20 (2.29)
ŁJL =
l
(2 30)ow (0,177 + 0,00025/i)
0'4
2 . 2 . 2 . M o d e l o de viento cortante
En la atmósfera se generan diferencias en la dirección y velocidad del viento entre dis tancias relativamente pequeńas debido al movimiento de las masas de aire. Este fenómeno es considerado como un evento meteorológico de microescala a pesar de estar relacionado con los eventos de macroescala que suceden en la atmósfera [10]. Es importante agregar este fenómeno a la simulación para agregar más realismo a la simulación y observar posibles prob lemas en el control de la aeronave bajo situaciones reales.
2.3. Control Difuso 22
(2.31)
Categoría según el estándar MILF8785C Valor de la constante ZQ
A y B 2
C 0.15
Cuadro 2.3: Valor de la constante ZQ
2.3. Control Difuso
En contraste con las técnicas de control convencional, los controladores de lógica difusa (FLC por sus siglas en inglés) son utilizados en situaciones donde el proceso no se puede definir de forma precisa, pero si puede ser controlado por un operador humano con un am plio conocimiento del mismo. La idea básica detrás de un controlador FLC es incorporar el conocimiento de un operador humano experto en el diseńo del controlador de un proceso. Este controlador tiene una relación entradasalida descrita por una serie de reglas (SIENTONCES) que involucran variables lingüísticas en lugar de un modelo dinámico complejo.
En la figura 2.10 se presenta el modelo típico de la implementación de un FLC. El con trolador se compone de cuatro elementos principales; fusificador, máquina de inferencia, base de reglas difusas y defusificador. La salida del FLC es la manipulación que el controlador realiza sobre la planta para llevarla a un estado deseado.
El fusificador evalúa subjetivamente los datos de entrada para obtener un valor subjetivo
Fusificador Máquina de inferencia
Base d s reglas
Defasificador Proceso
Figura 2.10: Estructura de un controlador de lógica difusa
función A, ˇj,A(X), es igual a 1 en XQ y cero en todos los demás puntos.
Las reglas difusas son un grupo de reglas SIENTONCES en las cuales los términos involucrados son variables lingüísticas. Este conjunto de reglas de control representa la relación entradasalida del sistema. La forma canónica de una regla difusa de control para un sistema con múltiples entradas y una salida (MISO por sus siglas en inglés) es la siguiente,
Rl
: IF
x
isAi
AND y is Bu THEN z = d (2.32) en donde x, ..., y y z son variables lingüísticas que representan las variables de estado del proceso y la variable de control respectivamente. Adicionalmente, i ż , . . . , Bˇ y Cˇ son los valores lingüísticos de las variables lingüísticas antes mencionadas.La base del FLC para emular las decisiones humanas en el marco de la lógica difusa es la máquina de inferencia. El modus ponens generalizado, que se presenta en la siguiente ecuación, es aplicado en el razonamiento difuso de los FLC.
Premisa 1: IF x is A, THEN y is B
Premisa 2: x is A'
2.4. Redes neuronales 24 en donde A, A', B y B' son conjuntos difusos en los conjuntos universales U, U, V y
V respectivamente. De manera general se puede decir que una regla de control difusa puede ser expresada como una implicación difusa de la forma R = A —> B. La respuesta del modus
ponens generalizado presentado anteriormente puede ser obtenida según la siguiente ecuación,
B' = A' o R = A' o {A>B) (2.34)
Existen varios operadores de composición que pueden ser utilizados para resolver la ecuación anterior, pero generalmente se utilizan el maxmin o el maxproduct debido a que son simples de calcular.
El proceso de defusificación realiza la correspondencia de un espacio de acciones de control difusas definidas en un universo de discurso a un espacio de acciones de control nítidas. Este proceso es necesario debido a que la mayoría de los procesos requiere de una acción de control nítida para realizar el control. Las estrategias de defusificación son muy variadas y dependen de las características que requiera el usuario del sistema. Los métodos de defusificación de centro de área y medio del máximo (COA y M O M por sus siglas en inglés) son presentados a continuación debido a que son utilizados con frecuencia [12].
ZCOA — ~ ™ 7TT7T" {żáo)
m ^
Z*MOM = ™ {2.36)
- II i
3 = 1
Para obtener un control óptimo del proceso en el cual se implementa un FLC es necesario seleccionar cuidadosamente las variables de entrada y salida del controlador. Generalmente se utilizan variables como el error, la derivada del error y la integral del error como variables de entrada para el sistema de control.
2.4. Redes neuronales
basadas en la función base radial (RBFN por sus siglas en inglés) se presentan las funciones de activación y de salida de los nodos ocultos de la RBFN.
2 . 4 . 1 . Fundamentos de redes neuronales
Las redes neuronales (RN) son sistemas de procesamiento de información que tienen la habilidad de aprender, recordar y generalizar basándose en patrones de entrenamiento o datos. Este tipo de sistemas están construidos intencionalmente con principios organizacionales que son similares a los de un cerebro humano. Las RN tienen un gran número de elementos de procesamiento altamente conectados, que generalmente trabajan en paralelo. En el compor tamiento colectivo de las RN es donde se pueden observar las capacidades de aprender y generalizar en base a información [12].
Los modelos de RN están compuestos de tres elementos principales; Modelos de las neuronas, modelos de la estructura e interconexión y las reglas de entrenamiento o aprendizaje para actualizar los pesos en las conexiones de las neuronas. Los elementos de procesamiento (EP) realizan la tarea de cómputo en dos partes, entrada y salida. Se puede representar el cómputo de integración de la entrada en el modelo general de la función / que se muestra a continuación,
m
fi = neti = w
ijx
j ~ d
i (2.37)
3 = 1
El segundo cómputo realizado por el EP es el valor de activación de la salida basado en la entrada neta. Este cálculo se basa en la junción de activación o función de transferencia
a
( / ) > que comúnmente es representada con alguna de las siguientes funciones,
if / > 0
(2.38) de lo contrario
, 1 if / > 0
a(f) = s g n ( / ) = { ~ (2.39)
2.4. Recles neuronales 26
1 i f / > l
«(/) = /
if 0 < / < 0 (2.40) 0 if / < 0Las RN están formadas por EP altamente interconectados, de forma que todas las salidas están conectadas a través de pesos a otros EP o a sí mismos. Estas interconexiones pueden ser realizadas con retraso o sin este. Existen dos parámetros principales en la estructura de la
RN, los cuales son; Número de capas y tipo de salida (retroalimentada o directa). El último elemento importante de las RN son las reglas de aprendizaje, las cuales se pueden clasificar en base lo que estas aprenden. Las reglas pueden aprender los parámetros o la estructura. Las reglas utilizadas comúnmente son las de aprendizaje de parámetros [12].
2.4.2. R e d e s neuronales basadas en la función base radial
Una función base radial es una función evaluada en el dominio real cuyo valor dependo únicamente de su distancia al origen, de forma que,
Las redes neuronales basadas en la función base radial (RBFN) son redes híbridas con la arquitectura del modelo instaroutstar y utilizan los esquemas de aprendizaje supervisado y nosupervisado. Este tipo de RN fue propuesto por Moody y Darken [15] en 1989. La RBFN está basada en el concepto de sintonización local y de la estructura receptiva de campo sobrepuesta que ha sido estudiada en la corteza del cerebro, en la corteza visual, etc. Los nodos ocultos de la RBFN tienen una función de activación gaussiana normalizada como la que se muestra a continuación, ya que las funciones gaussianas son una forma particular de
las funciones de base radial [12],
ż ( x ) = ż ( | | x | | ) (2.41)
de forma alternativa, el valor depende de otro valor c, llamado centro, tal que,
z
q
=
9g{x) = — Rq{x)exp —
\x— m
9|
2/2cr
r
2Y,
Rk{x)
E exp | x m f c | / 2 o |
c=l fc=i L J
(2.43)
La salida de la RBFN es la suma ponderada de la salida del nodo oculto,
Vi = «ż
Wii
Z(ˇ
+ (2.44)donde, aż(*) es la función de activación de salida y Q{ es el valor del umbral.
Utilizando el concepto de RBFN se puede construir un controlador neurodifuso, en el cual la base de reglas se substituye por funciones de peso w, las cuales determinan el valor nítido a la salida del controlador [11]. La figura 2.11 es un ejemplo de la función que se encuentra en la capa oculta de la red neuronal.
Valor de salida
Figura 2.11: Función en la capa oculta de la red neuronal
2.5. Algoritmos genéticos
2.5. Algoritmos genéticos 28 Los algoritmos genéticos pueden ser utilizados en cualquier situación en la que se re quiera de optimización, lo que quiere decir que se tiene un espacio de solución muy amplio pero se requiere encontrar la mejor solución. La mejor solución para un problema puede ser algo relativo a la aplicación o a las necesidades específicas, por lo que se tiene que encontrar una función de desempeńo que indique que tan bien se acopla una respuesta dada a las car acterísticas deseadas.
El algoritmo general para los AG es el mismo en muchos de los casos, y puede ser rep resentado de la siguiente forma [12];
START
• Generar población inicial
Se crea una población de cromosomas aleatoria para evitar que el algoritmo encuentre un máximo o mínimo local de la función evaluada.
• Asignar la función de desempeño a todos los individuos
Se evalúa la función de desempeńo para cada uno de los cromosomas de la población.
DO UNTIL
• Crear nuevos individuos
Se crean nuevos cromosomas por medio de la mutación, recombinación y reproducción. En el proceso de reproducción, los individuos más aptos tienen mayores probabilidades de tener más copias de ellos mismos en la siguiente generación. En la recombinación se intercambia información entre dos individuos seleccionados para generar nuevos in dividuos. El último proceso de creación de cromosomas es el de mutación, en el cual se altera aleatoriamente una fracción de la información de un individuo para crear uno nuevo [11] [12].
• Aplicar la función de desempeño
Se lleva a cabo el proceso de eliminación de los cromosomas no adecuados para dar lugar a los nuevos individuos. La evaluación se basa en el grado de satisfacción de la función de desempeńo.
• Evaluación del criterio de paro
Se verifica si la mejor solución fue encontrada, evaluando en el criterio establecido previamente.
LOOP
END
La razón por la que se desea crear un algoritmo que ajuste todos los parámetros si multáneamente es que de lo contrario se pueden encontrar máximos y mínimos locales, los cuales no representan una solución global óptima. Para la evaluación del desempeńo de los parámetros del controlador se requiere una función de evaluación, como se mencionó an teriormente. Esta función es dependiente de la aplicación y debe de ser desarrollada en la investigación a realizarse [11].
2.6. Trabajos relacionados
En este apartado se discuten los resultados de trabajos relacionados a este en el control longitudinal de aeronaves y en el campo de investigación utilizando las técnicas propuestas en este trabajo para la solución del problema de control.
2.6.1. Controladores Difusos y Neuro-Difusos sintonizados con algoritmos
genéticos
2.6. Trabajos relacionados 30 durante los primeros instantes, en los que no se tiene conocimiento previo de las característi cas de la planta. Autores como Soria [23] y Van der Spek et al. [28] han realizado trabajos en el control de procesos con sistemas neurodifusos, mientras que Pham y Karaboga [19] han utilizado las tres técnicas en conjunto para su investigación. Sin embargo, como se men cionó antes, ninguno de estos autores llevó su experimentación a una planta física.
Teo Lian et al. [11] implemento el control físico de nivel utilizando algoritmos genéticos para sintonizar un controlador neurodifuso en un sistema de dos tanques acoplados, pero esto fue realizado en condiciones de laboratorio y con un proceso que no presentaba un peligro inherente para sí mismo al realizarse las pruebas con este tipo de controladores.
2.6.2. Control longitudinal de aeronaves
Powell et al. [20] presenta el controlador con retroalimentación de estados de sexto orden para controlar las variables de interés en este trabajo. Adicionalmente propone controladores proporcionalesderivativos para realizar el control, pero sin la obtención de resultados satis factorios.
A pesar de la incapacidad de los controladores PID de trabajar en sistemas nolineales, como lo son los aeroplanos, se siguen desarrollando sistemas adicionales y mejoras para im plementar este tipo de controladores en aeronaves. Un ejemplo de esto es el trabajo de No et al. [18], en el cual utilizan un modelo linealizado de la dinámica desacoplada del aeroplano y controlan la velocidad, el ángulo de cabeceo y el ángulo de balanceo utilizando controladores PID. Adicionalmente, utilizaron compensadores de adelanto atraso para crear lazos internos que aseguraran la estabilidad del sistema.
Otros autores utilizan sistemas de aumento de estabilidad (SAS, por sus siglas en in
glés), como lo hace Ficola et. al [3]. En este trabajo se linealizan las ecuaciones de una
resultados obtenidos sólo pueden ser utilizados en un rango pequeńo de acción, en el cual el modelo dinámico del aeronave continúe siendo lineal.
Otra técnica comúnmente utilizada es el controlador í/oo, como el desarrollado por Turkoglu y Jafarov [26], en el cual comparan los resultados de utilizar un controlador PID convencional para controlar la altura del modelo linealizado de un avión no tripulado a escala contra el controlador de un grado de libertad. Como resultado de esta investigación se obtuvo un mejor desempeńo que el controlador convencional en la respuesta al escalón y en rechazo de perturbaciones.
En el campo de la computación inteligente también existen algunos desarrollos impor tantes en el tema de control de aeronaves, como lo es el trabajo de Yan et al. [30], en el cual se utilizaron redes neuronales de mínima utilización de recursos (MRAN, por sus siglas en
inglés) para controlar el ángulo de cabeceo q y la velocidad por medio de la manipulación de
Capítulo
Diseńo y Sintonización del Controlador
3.1. Introducción
Al observar el problema de control de la altura de la aeronave es necesario analizar el comportamiento de las variables requeridas para mantener las condiciones de vuelo de la planta en cuestión. Un problema adicional que requiere atención especial es el aseguramiento de las condiciones de vuelo, ya que si el ángulo de cabeceo es mayor a un cierto límite, el avión se desplomaría. Por lo tanto es necesario utilizar dos lazos de control, uno interno que asegure las condiciones de vuelo y uno externo que mantenga la variable deseada en el valor de referencia. El lazo de control propuesto se observa en la figura 3.1.
Típicamente se utilizan controladores PID para realizar las funciones de control, pero debido a la no linealidad de la planta generalmente se requieren de adaptaciones basadas en la
Zd Controlador de lazo Externo
Controlador de lazo Interno
5e
Dinámica delS
i
J '
Controlador de lazo
Externo
J *
Controladorde lazo
Interno avión
e
z
Figura 3.1: Lazo de control de altura implementado
las, generalmente estos trabajan en condiciones limitadas, y no lo hacen con la nolinealidad del sistema.
Para resolver el problema de control del lazo interno se implemento un controlador neuro difuso basado en redes neuronales de función base radial con sintonización por medio de un algoritmo genético. Este tipo de RN tiene la característica de que sólo tiene una capa oculta, y adicionalmente cuenta con una velocidad de convergencia mayor que el algoritmo de retro propagación. Para el controlador del lazo externo se utiliza un PID convencional, ya que el controlador del lazo interno trabaja con las nolinealidades del sistema.
3.2. Lazo interno de control
La figura 3.2 muestra el diagrama base a utilizarse para la implementación del modelo propuesto. En la figura se observa como la población inicial de parámetros se genera en base a la entrada del usuario y a una función aleatoria. La población se introduce en el controlador neurodifuso y se simula el desempeńo de los parámetros utilizando un modelo del aeroplano. Los resultados de la simulación son evaluados por una función de desempeńo, la cual permite analizar el resultado obtenido. Si el resultado de la evaluación no es satisfactorio, se utilizan las técnicas descritas en el apartado de algoritmos genéticos para crear nuevos parámetros que son evaluados en base a la función de desempeńo, de igual forma que la población inicial. Cuando la evaluación de desempeńo produce el resultado deseado se guarda la información obtenida y se termina la secuencia.
3.2.1. Controlador NeuroDifuso basado en Funciones Base Radial
3.2. Lazo interno de control 34
f entrada del \ usuario
población inicial
aleatorización
f f
RBFFLC u modelov
J
mutación
evaluación de desempeño
guardar la información necesaria
si no Terminó? Terminó?
J
1 Figura 3.2: Diagrama representativo del modelo a implementarse del controlador difuso y la salida ponderada de los nodos ocultos respectivamente. Cuando se utilizan funciones de membresía gaussianas en el controlador difuso y en la red neuronal, ambos sistemas utilizan parámetros de centro y grosor para realizar el cálculo de grado de membresía a una regla en particular. Todas estas similitudes permiten integrar la red neuronal y el controlador difuso en un controlador difuso especial. Si se selecciona adecuadamente el centro y el grosor de la unidad de base radial, la red se puede utilizar como una base de reglas difusa. Cada una de las reglas del controlador difuso tradicional son procesadas en uno de los nodos de base radial, y por lo tanto la ec. (2.22) se puede reescribir de la siguiente forma:IF
(Cl,
l 5DÍż)
AND
(Cj
i n, £>j
in)
AND
(C*,
N,
D^
N)
THEN W i ˇ 1 AND
w
iˇm A N Dw
iiMen donde la acción de control es determinada por los pesos de conexión W{ m, los cuales son
Capa de entrada
Capa
oculta Capa de salida
o
o
x n
O
O
x N
O
Figura 3.3: Controlador neurodifuso basado en funciones de base radial
una regla determinada. La salida del controlador depende de los pesos que interconectan a los nodos de la capa oculta y los nodos de salida. La salida del controlador se calcula haciendo la normalización de los pesos del controlador según la siguiente ecuación:
en donde P es el número de unidades ocultas o reglas de control, u>im es el peso que
conecta la unidad local i con el nodo de salida m y /iż es la salida de la función base difusa de cada regla, la cual se calcula con la fórmula:
en donde T es el número de reglas difusas y | | « | | es el operador norma en cualquiera de sus formas. La salida del controlador es un valor nítido que puede ser aplicado directamente al sistema.
El sistema de control del lazo interno requiere de la observación de 3 variables princi pales, las cuales son el error del ángulo de cabeceo, la derivada del error del ángulo de cabeceo
[image:53.612.140.496.93.304.2]3.2. Lazo interno de control 36
Figura 3.4: Controlador neurodifuso de ángulo de cabeceo con 2 variables de entrada
y la velocidad del avión. La utilización de una tercer variable incrementa en gran medida la cantidad de reglas y funciones de membresía que deben de ser sintonizadas en el controlador, por lo que es necesario justificar su utilización. En la figura 3.4 se observa la simulación del lazo interno de control del ángulo de cabeceo utilizando un controlador neurodifuso con 2 variables de entrada, en el cual no se observa la velocidad. En el lado izquierdo se observa una simulación con velocidad inicial de 32 m / s , para la cual fue sintonizado el controlador, y del lado derecho se tienen los resultados de una simulación con velocidad inicial de 20 m/s. Como se puede observar en la figura, la respuesta a un cambio de referencia es diferente ya que las fuerzas que se generan en las alas y los elevadores dependen de la velocidad de la aeronave. Debido a que se debe de asegurar que el controlador cumpla con los requisitos del estándar MILF8785C [27], es necesario agregar la velocidad como variable de entrada del controlador, lo que permite mantener un comportamiento deseado en las diferentes condi ciones de operación. La tabla 3.1 contiene los parámetros del controlador neurodifuso basado en funciones de base radial utilizado para controlar el lazo interno del ángulo de cabeceo.
Número de entradas: 3 Número de funciones de membresía: 5
Variables de entrada: Error y derivada del error del ángulo de cabeceo y velocidad (U) Número de reglas: 125
Número total de parámetros: 155
Cuadro 3.1: Parámetros del controlador NeuroDifuso basado en F B R
ventaja de adicionar la velocidad de la aeronave como variable de entrada en el controlador. Para resolver este problema se realizó la sintonización de subcontroladores de 2 variables (er ror y derivada del error) en 5 velocidades diferentes. Una vez que se encuentran el ancho y la base de las funciones de membresía al sintonizar el primer subcontrolador, ya no es necesario buscar estos valores al sintonizar los siguientes subcontroladores y por lo tanto solo se deben de buscar los pesos de las funciones de salida o reglas. Los subcontroladores se optimizan individualmente utilizando un algoritmo genético para obtener resultados muy similares en los parámetros de respuesta al escalón a diferentes velocidades.
Una vez sintonizados los subcontroladores estos se integran para formar el controlador neurodifuso de 3 variables necesario para el lazo de control interno. Para crear el controlador neurodifuso se requiere seleccionar el ancho de las funciones de membresía de la tercera vari able (velocidad). Debido a que la sintonización de los subcontroladores se realizó a intervalos fijos entre 20 y 40 m / s , el valor del ancho de las funciones se seleccionó de forma que el cruce de dos funciones de membresía adyacentes se realizara en el 0.4 de valor de pertenencia de estas.