DESARROLLO DE UN SISTEMA DE CONTROL POR MEDIO DE SENSORES MIOELÉCTRICOS PARA UNA PRÓTESIS DE BRAZO TRANSRADIAL
JOHN EDINSON BERMEO CALDERÓN
UNIVERSIDAD SANTO TOMÁS FACULTAD DE INGENIERÍA MECÁNICA
DIVISIÓN DE INGENIERÍAS BOGOTÁ
DESARROLLO DE UN SISTEMA DE CONTROL POR MEDIO DE SENSORES MIOELÉCTRICOS PARA UNA PRÓTESIS DE BRAZO TRANSRADIAL
JOHN EDINSON BERMEO CALDERÓN
Proyecto de Trabajo de Grado en la modalidad de Solución a un problema de Ingeniería para optar al título de Ingeniero Mecánico
DIRECTOR
ING. JESÚS DAVID VILLARREAL LÓPEZ CODIRECTOR
ING. EDUARD GALVIS RESTREPO
UNIVERSIDAD SANTO TOMÁS FACULTAD DE INGENIERÍA MECÁNICA
DIVISIÓN DE INGENIERÍAS BOGOTÁ
Nota de aceptación:
Firma del presidente del jurado
Firma del jurado
DEDICATORIA
AGRADECIMIENTOS
En primer lugar, agradezco a la Universidad Santo Tomás, institución que contribuyo en mi desarrollo como persona y ayudo a descubrir mi potencial como ingeniero en servicio de la humanidad y del mundo. Al semillero HED y en especial al ingeniero Marco Velasco por su apoyo y acompañamiento durante el proceso de aprendizaje quien me brindó su apoyo durante el desarrollo de este proyecto.
TABLA DE CONTENIDO
1 INTRODUCCIÓN 10
2 OBJETIVOS 12
2.1 OBJETIVO GENERAL 12
2.2 OBJETIVOS ESPECÍFICOS 12
3 MARCO TEÓRICO 13
3.1 PRÓTESIS MIOELÉCTRICAS 13
3.2 TIPOS DE CONTROL MIOELÉCTRICO 13
3.2.1 CONTROL DE TIPO ENCENDIDO / APAGADO (ON/OFF) 13
3.2.2 CONTROL MEDIANTE MÁQUINAS DE ESTADO Y CONTROL PROPORCIONAL 14
3.2.3 CONTROL MEDIANTE RECONOCIMIENTO DE PATRONES 14
3.3 ESTADO DEL ARTE 14
3.4 SEÑALES MIOELÉCTRICAS 16
4 DETERMINACIÓN DE LOS PARÁMETROS DE LA PRÓTESIS 18
4.1 DESCRIPCIÓN DE LOS TIPOS DE MOVIMIENTOS PRESENTES EN LA MANO HUMANA Y
DEFINICIÓN DE LOS MOVIMIENTOS DEL PROTOTIPO 18
4.1.1 La mano humana 18
4.1.2 Prototipo de prótesis 23
4.2 GENERACIÓN DE MODELO CAD DEL PROTOTIPO 27
4.3 GENERACIÓN DEL PROTOTIPO DE PRÓTESIS DE BRAZO TRANSRADIAL Y OBTENCIÓN DE
LAS PROPIEDADES FÍSICAS DEL PROTOTIPO 28
4.3.1 Masa 28
4.3.2 Momento de Inercia 28
4.3.3 Centro de masa 29
4.4 PROCESAMIENTO DEL MODELO EN MATLAB®-SIMULINK™ (SIMMECHANICS) 30
4.4.1 Generalidades de Matlab® 30
4.4.2 Generalidades de Simulink™ 31
4.4.3 Generalidades de SimMechanics 31
4.4.4 Importación del modelo CAD a Simulink™ 32
4.4.5 Modelo de la prótesis en Simulink 34
5.1 ECUACIONES DE EULER-LAGRANGE 36
5.2 DETERMINACIÓN DE LOS PARÁMETROS PARA EL MODELO DINÁMICO 38
5.3 DETERMINACIÓN DEL MODELO DINÁMICO PARA UN DEDO DEL PROTOTIPO 39
6 DISEÑO DEL SISTEMA DE INSTRUMENTACIÓN Y ADQUISICIÓN DE DATOS 45
6.1 CONTROL DE POSICIÓN 45
6.2 CONTROL PROPORCIONAL-DERIVATIVO 46
6.3 SIMULACIÓN NUMÉRICA DE CONTROL PROPORCIONAL 47
6.4 SIMULACIÓN NUMÉRICA DE CONTROL PROPORCIONAL DERIVATIVO 52
6.5 SISTEMA DE ADQUISICIÓN DE LAS SEÑALES MIOELÉCTRICAS 54
6.5.1 Myo™ Gesture Control Armband 55
6.5.2 Adquisición de datos 58
6.5.3 Desarrollo experimental 64
7 RESULTADOS 67
7.1 RESULTADOS DE LA SIMULACIÓN NUMÉRICA DEL CONTROL PROPORCIONAL DERIVATIVO 67
7.1.1 Errores de posición 68
7.1.2 Pares aplicados 68
7.1.3 Velocidad Angular 69
7.1.4 Posición de las articulaciones 70
7.2 RESULTADOS DESARROLLO EXPERIMENTAL 71
7.2.1 Resultados obtenidos para el dedo Pulgar 72
7.2.2 Resultados obtenidos para el dedo Índice, Medio y Anular 72
7.2.3 Resultados obtenidos para el dedo Meñique 74
8 CONCLUSIONES Y TRABAJO FUTURO 76
8.1 CONCLUSIONES 76
8.2 TRABAJO FUTURO 77
9 BIBLIOGRAFÍA 78
LISTA DE FIGURAS
Figura 1. Niveles de detección de electromiografía 17
Figura 2. Estructura ósea de la mano humana. 19
Figura 3. Movimientos presentes en la mano humana. 20
Figura 4. Rangos de movimiento de las articulaciones interfalángicas. 21
Figura 5. Prototipo de prótesis de mano. 23
Figura 6. Disposición de las articulaciones en la prótesis 24 Figura 7. Ensamble definitivo del prototipo de prótesis en SolidWorks. 27 Figura 8. Caja de diálogo herramienta de propiedades físicas utilizada para las propiedades de los
eslabones del prototipo. 29
Figura 9. Entorno de simulación y visualización de Simulink™ para el prototipo. 32 Figura 10. Visualización del ensamblaje de la prótesis en Simulink™. (a) Diagrama de bloques del modelo en Simulink™ en desorden. (b) Diagrama de bloques del modelo en Simulink™ en orden.
35
Figura 11. Robot manipulador de 3 grados de libertad. 40
Figura 12. Diagrama de bloques del control PD más compensación de la gravedad. 47 Figura 13. Implementación del modelo dinámico para el meñique de la prótesis en Matlab®. 49 Figura 14. Implementación del algoritmo de control proporcional derivativo más compensación de la
gravedad en Matlab® 50
Figura 15. Implementación del Script que soluciona las ecuaciones del modelo dinámico para el
dedo meñique y simulación del control PD 52
Figura 16. Representación del diagrama de bloques del dedo meñique en Simulink™ 53 Figura 17. Bloque de control implementado e interior del bloque de control 54
Figura 18. Myo™ Gesture Control Armband 56
Figura 19. Características de la Myo™. 57
Figura 20. Músculos anteriores y laterales del antebrazo (plano superficial) y Músculos laterales y plano profundo de los músculos posteriores del antebrazo. 59
Figura 21. Ubicación de la Myo™. 61
Figura 22. Visualización de la interfaz de usuario por defecto en el paquete MyoMex. 63 Figura 23. Interfaz de usuario desarrollada para la fase experimental. 64 Figura 24. De izquierda a derecha: posición de reposo, movimiento del pulgar, movimiento del índice, movimiento del dedo medio, movimiento del anular y movimiento del meñique. 65 Figura 25. Representación de la señal tratada, para el caso de una de las tomas experimentales
LISTA DE TABLAS
LISTA DE GRÁFICAS
LISTA DE ANEXOS
Anexo 1. Códigos de la simulación numérica en Matlab para cada dedo. 81 Anexo 2. Diagramas de bloques de control en Simulink™ para cada dedo y para el ensamble. 81 Anexo 3. Interfaces de usuario y archivos necesarios para la conexión del MyoMex. 81
Anexo 4. Archivos de Excel y tomas experimentales. 81
1 INTRODUCCIÓN
En la actualidad el hombre tiende a realizar tareas que demandan estar en constante movimiento, dichas tareas en su gran mayoría incluyen el uso de las extremidades superiores. Sin embargo, para una persona que posea una amputación en dichas extremidades se evidencia una reducción en la calidad de vida. Esto debido a la incapacidad de realizar tareas específicas de manera normal. Además, desencadena un impacto psicológico en la persona que posee dicha problemática (Cossio et al. 2012). El número de personas discapacitadas en Colombia debido a la pérdida total o parcial de sus extremidades es considerable. Según el DANE (Departamento Administrativo Nacional de Estadística), en el año 2005, los discapacitados representan casi el 6,27% del total de la población. De estos, aproximadamente 381.724 colombianos no tienen la capacidad de usar sus brazos y piernas y cerca de 758.000 más no tienen la posibilidad de caminar (Gómez 2008). Adicionalmente a esto, enfermedades vasculares y la diabetes son causantes de un gran número de amputaciones en el mundo. Se calcula que en el mundo hay más de 170 millones de personas que sufren diabetes y se prevé que esta cifra se duplique para el año 2030 («OMS | Día Mundial de la Diabetes: muchas de las amputaciones que acarrea la enfermedad se podrían evitar» 2013)-(Mathers y Loncar 2006).
2 OBJETIVOS
2.1 OBJETIVO GENERAL
Desarrollar un sistema de control por medio de sensores mioeléctricos para una prótesis de brazo transradial.
2.2 OBJETIVOS ESPECÍFICOS
Simular el prototipo de prótesis de brazo transradial para determinar la cinemática del sistema.
Adaptar un sistema de instrumentación para la lectura de las señales provenientes de los músculos.
3 MARCO TEÓRICO
Para la implementación de sistemas de control mioeléctrico para prótesis de brazo transradial se deben tener en cuenta los siguientes aspectos.
3.1 PRÓTESIS MIOELÉCTRICAS
Las prótesis mioeléctricas son controladas por medio de un sensor que se denomina sensor mioeléctrico, el cual capta las señales emitidas por los músculos para su accionamiento. Hoy en día este tipo de prótesis son las que más alto grado de rehabilitación brindan, además cuenta con gran capacidad de fuerza y velocidad a la hora de accionamiento (UNAM [sin fecha]). El factor estético en este tipo de prótesis es bastante favorable debido a la flexibilidad en su manufactura.
3.2 TIPOS DE CONTROL MIOELÉCTRICO
Los avances tecnológicos por los que transcurrió el control mioeléctrico fueron significativos (Brazeiro, Petraccia y Valdés 2015). Las técnicas más utilizadas para el control de prótesis mioeléctricas son:
Control de tipo encendido apagado (on/off) mediante umbrales con velocidad de movimiento constante.
Control mediante máquinas de estados y control proporcional con posibilidad de variación del grado de contracción muscular (Brazeiro, Petraccia y Valdés 2015).
Control mediante el reconocimiento de patrones.
3.2.1 CONTROL DE TIPO ENCENDIDO / APAGADO (ON/OFF)
El control de dos posiciones o de encendido y apagado es relativamente simple y barato, razón por la cual su uso es extendido en sistemas de control tanto industriales como domésticos.
accionamiento se realiza una comparación de la intensidad de las señales con un parámetro de intensidad determinado, el cual se denomina umbral (Asghari Oskoei y Hu 2007).
3.2.2 CONTROL MEDIANTE MÁQUINAS DE ESTADO Y CONTROL
PROPORCIONAL
Las máquinas de estados finitos se componen de una cantidad finita de posibles estados y de transiciones de estado. Sus salidas son además una cantidad finita de comandos predefinidos (Asghari Oskoei y Hu 2007). Para la aplicación al control de prótesis mioeléctricas, los estados representan comandos de movimiento de la prótesis, la única desventaja es que estas máquinas requieren ser entrenadas antes de ser utilizadas (Brazeiro, Petraccia y Valdés 2015).
3.2.3 CONTROL MEDIANTE RECONOCIMIENTO DE PATRONES
Esta estrategia es la ideal para el desarrollo de prótesis con varios grados de libertad debido a que la sola medida de la intensidad de la señal mioeléctrica no basta, sino también la identificación de cuál de los grados de libertad de la prótesis es el que desea accionar el usuario. Para desempeñar esta tarea es necesario que se desarrolle una etapa de clasificación donde se identifiquen estas señales y se le asignen los movimientos deseados (Brazeiro, Petraccia y Valdés 2015). Es en este tipo de clasificaciones donde se tiene aplicación el uso de control mediante reconocimiento de patrones.
En la actualidad las técnicas más utilizadas para el reconocimiento de patrones son: las redes neuronales, la lógica difusa y el enfoque probabilístico.
3.3 ESTADO DEL ARTE
En 2005 se evidencia que el estudio de este tipo de prótesis ha avanzado en gran medida. Mostrando de forma directa prototipos que cuentan con varios grados de libertad además se ve evidenciado el amplio uso de sensores (SEMG), implementados para el control de movimiento de estas (Huang et al. 2006). En 2012 se ve reflejado otro gran adelanto en el área de captura de datos de los sensores (SEMG), donde se muestra un método de control para prótesis mioeléctricas, haciendo énfasis en la adquisición y tratamiento de dichas señales para su posterior modelamiento en software de análisis de señales (Dalley, Varol y Goldfarb 2011). Seguidamente en 2014 se desarrolla un trabajo de investigación basado en el desarrollo de una prótesis que posea seis grados de libertad, para este caso se ve una gran evolución en el mecanismo de accionamiento de la prótesis, el cual está basado en el uso de pequeños engranajes los cuales se encargan de transmitir el movimiento desde los motores ubicados en la base de la prótesis (Jiang et al. 2014). En 2015 se desarrolla una prótesis de seis grados de libertad con gran capacidad de carga y además fue desarrollada bajo el concepto de OpenSource el cual busca que el conocimiento adquirido luego del desarrollo de estos dispositivos sea sin ánimo de lucro, el aporte más importante suministrado por dicha investigación fue la incursión de prototipos mecánicos mucho más elaborados además con la incursión de la tecnología aditiva para la fabricación de dichos dispositivos (Krausz, Rorrer y Weir 2015).
sensores aparte de los mioeléctricos, debido a que el fin del InMoov Project es el desarrollo de un androide de tamaño real (Langevin 2012a).
En lo anterior, se observa que hay diferentes formas de creación de una prótesis de brazo, lo que también se evidencia es que la implementación del control para dichos dispositivos genera un costo bastante elevado para estas. Por lo tanto, se aprecia la necesidad que se implemente un sistema de control mioeléctrico para una prótesis de brazo transradial, pero además que posea amplias características de movimiento y que pueda ser distribuido a bajo costo (Ocampo, Henao y Lorena 2010).
3.4 SEÑALES MIOELÉCTRICAS
Figura 1. Niveles de detección de electromiografía
Fuente:(Morán Medina 2016)
Teniendo la información mostrada en (Morán Medina 2016), el registro a nivel de una sola fibra muscular es análogo al registro de una sola célula, y es posible realizar un registro intracelular o extracelular. El potencial extracelular es conocido como potencial de acción única abreviado SFAP por sus siglas en ingles.
En el registro a nivel de una sola unidad motora, el electrodo interior registra una señal compuesta, que representa la integración espacial de la actividad simultanea de todas las fibras inervadas por el axón de la motoneurona y sus ramas. A esta señal se le denomina ―potencial de acción de la unidad motora‖ abreviado MUAP por sus siglas en ingles.
4 DETERMINACIÓN DE LOS PARÁMETROS DE LA PRÓTESIS
El prototipo seleccionado para este proyecto es el de InMoov, el cual hace parte de una iniciativa liderada por Gael Langevin, quien es un diseñador y escultor que desde el año 2012 busca la creación de un prototipo de androide que pueda ser accionado de manera remota. Es desde esta iniciativa de donde se obtuvo el modelo del prototipo que para fines de investigación e innovación tiene licencia OpenSource (Langevin 2012b).
El prototipo que se estudiará en la siguiente sección tiene la capacidad de realizar 6 grados de libertad (5 de flexión en los dedos y 1 de rotación en la muñeca). Dicho accionamiento se produce mediante el uso de servomotores dispuestos en el cuerpo de la prótesis que adicionalmente están conectados mediante cables inelásticos con los dedos para así realizar el movimiento deseado. El modelado del prototipo fue desarrollado con el fin de realizar la simulación que posteriormente será elaborada con el fin de verificar los resultados obtenidos mediante la implementación del control para el movimiento de los dedos.
4.1 DESCRIPCIÓN DE LOS TIPOS DE MOVIMIENTOS PRESENTES EN LA
MANO HUMANA Y DEFINICIÓN DE LOS MOVIMIENTOS DEL
PROTOTIPO
4.1.1 La mano humana
La mano humana es el extremo terminal de las extremidades superiores. Cumple en el ser humano funciones complejas como es el caso de órgano sensitivo debido a la gran cantidad de terminaciones nerviosas presentes en esta (Alejandro et al. 2011). Además, de la realización de múltiples movimientos y acciones necesarias desempeñadas con el fin de la supervivencia o la misma relación con el entorno que rodea al individuo (Quinayás-Burgos et al. 2010).
.
con la muñeca a través de la palma. La mano humana cuenta con veinte grados de libertad (GDL) los cuales están accionados por cerca de cuarenta músculos (Cobos et al. 2008; Rouviére y Delmas 2005). La estructura ósea de la mano humana se encuentra en la Figura 2.
Figura 2. Estructura ósea de la mano humana.
Fuente: (Rouviére y Delmas 2005).
Con la intención de enunciar los movimientos que se presentan en la mano humana para la realización de tareas como agarre o manipulación de objetos, es necesario mostrar la estructura básica de la mano. Cada uno de los dedos está compuesto por tres falanges (Distal, media y proximal), con la excepción del pulgar que solo posee dos (Distal y proximal) (Rouviére y Delmas 2005).
perpendicular al plano de dicha palma. La flexión es el movimiento de alejamiento de la palma. Los dedos 2,3 y 4 se flexionan hacia el hueso navicular. En el quinto dedo la extensión involucra todas las falanges. Abducción se realiza mediante el alejamiento de la palma a lo largo de su propio plano. La flexión es de 90º en la articulación metacarpofalángica. Los movimientos enunciados anteriormente se aprecian en la Figura 3.
Figura 3. Movimientos presentes en la mano humana.
Fuente: (Cailliet 2006).
En base a la información presente en (Rouviére y Delmas 2005; Cobos et al. 2008; Cailliet 2006) se muestran las articulaciones presentes en la mano y sus respectivos grados de libertad:
Articulación carpo-metacarpal (CMC), la cual presenta 1 GDL para el movimiento de flexión – extensión.
Articulación metacarpofalángica (MCF), la cual presenta 2 GDLs para los movimientos de aducción – abducción y flexión – extensión.
Articulación interfalángica distal (IFD), la cual presenta 1 GDL para el movimiento de flexión – extensión.
Articulación trapeciometacarpiana (TMC), la cual presenta 2 GDLs presentes en el pulgar e involucrados en los movimientos de aducción – abducción y flexión – extensión.
Articulación interfalángica (IF), con 1GDL para movimientos de flexión – extensión.
La Figura 4 muestra la ubicación de las articulaciones presentes en los dedos meñique, anular, medio e índice. Donde se muestra a groso modo los rangos de movimiento de cada articulación para los movimientos de flexión – extensión.
Figura 4. Rangos de movimiento de las articulaciones interfalángicas.
Fuente: (Cailliet 2006).
Tabla 1. Restricciones estáticas presentes en las articulaciones en la mano humana.
ARTICULACIÓN FLEXIÓN EXTENSIÓN ABDUCCIÓN
- ADUCCIÓN Pulgar
Trapeciometacarpiana (TMC) 50º - 90º 15º 45º-60º
Metacarpofalángica (MCF) 75º - 80º 0º 0º
Interfalángica (IF) 75º - 80º 5º - 10º 0º Índice
Carpo-Metacarpal (CMC) 5º 0º 0º
Metacarpofalángica (MCF) 90º 30º - 40º 60º
Interfalángica Proximal (IFP) 110º 0º 0º
Interfalángica Distal (IFD) 80º - 90º 5º 0º Medio
Carpo-Metacarpal (CMC) 5º 0º 0º
Metacarpofalángica (MCF) 90º 30º - 40º 60º
Interfalángica Proximal (IFP) 110º 0º 0º
Interfalángica Distal (IFD) 80º - 90º 5º 0º Anular
Carpo-Metacarpal (CMC) 10º 0º 0º
Metacarpofalángica (MCF) 90º 30º - 40º 45º
Interfalángica Proximal (IFP) 120º 0º 0º
Interfalángica Distal (IFD) 80º - 90º 5º 0º Meñique
Carpo-Metacarpal (CMC) 15º 0º 0º
Metacarpofalángica (MCF) 90º 30º - 40º 50º
Interfalángica Proximal (IFP) 135º 0º 0º
Fuente: (Cobos et al. 2008).
4.1.2 Prototipo de prótesis
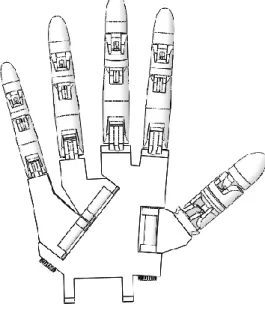
El prototipo se encuentra compuesto por 2 partes: la palma y los dedos. Los dedos están compuestos por tres falanges a excepción del pulgar que está compuesto únicamente por dos, la palma la componen 3 piezas las cuales simulan en parte a los huesos metacarpianos, dando así una aproximación a lo que ya se había mencionado sobre la mano humana. En la Figura 5 se muestra el prototipo de prótesis de mano que se analiza en el presente trabajo.
Figura 5. Prototipo de prótesis de mano.
Fuente: Autor
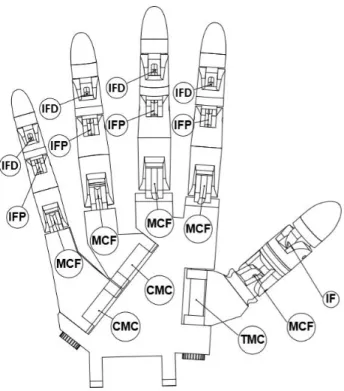
Articulación carpo-metacarpal (CMC), la cual se encuentra presente en los dedos meñique y anular cuenta con 1GDL únicamente para flexión – extensión.
Articulación metacarpofalángica (MCF), la cual se encuentra presente en todos los dedos, cuenta con 1 GDL únicamente para flexión – extensión.
Articulación interfalángica proximal (IFP), la cual se encuentra presente en todos los dedos a excepción del pulgar, cuenta únicamente con 1 GDL para flexión – extensión.
Articulación interfalángica distal (IFD), la cual se encuentra presente en todos los dedos a excepción del pulgar, cuenta únicamente con 1 GDL para flexión – extensión.
Articulación trapeciometacarpiana (TMC), la cual se encuentra presente únicamente en el pulgar y cuenta con 1 GDL para flexión – extensión.
Articulación interfalángica (IF), la cual se encuentra presente únicamente en el pulgar y cuenta con 1 GDL para flexión – extensión.
En la Figura 6 se muestra como están dispuestas las articulaciones en el prototipo de prótesis.
Fuente: Autor
Los rangos de movimientos presentes en la prótesis como se mencionó con anterioridad en la mano humana hacen referencia a los ángulos de las articulaciones del modelo, con la diferencia que en el caso de la prótesis esta carece de movimientos de extensión, abducción y aducción debido a que en su diseño no se consideró que la prótesis presentara estos movimientos, para así facilitar la generación de su modelo dinámico y el posterior control. En la Tabla 2 se muestra las restricciones estáticas presentes en la prótesis.
Tabla 2. Restricciones estáticas presentes en la prótesis de mano
ARTICULACIÓN FLEXIÓN
Índice
Carpo-Metacarpal (CMC) 0º Metacarpofalángica (MCF) 73º Interfalángica Proximal (IFP) 67º Interfalángica Distal (IFD) 60º
ARTICULACIÓN FLEXIÓN Carpo-Metacarpal (CMC) 0º Metacarpofalángica (MCF) 68º Interfalángica Proximal (IFP) 67º Interfalángica Distal (IFD) 60º
Anular
Carpo-Metacarpal (CMC) 10º Metacarpofalángica (MCF) 82º Interfalángica Proximal (IFP) 70º Interfalángica Distal (IFD) 60º
Meñique
Carpo-Metacarpal (CMC) 10º Metacarpofalángica (MCF) 82º Interfalángica Proximal (IFP) 70º Interfalángica Distal (IFD) 60º
Trapeciometacarpiana (TMC) 78º Metacarpofalángica (MCF) 63º Interfalángica (IF) 52º
Fuente: Autor
4.2 GENERACIÓN DE MODELO CAD DEL PROTOTIPO
Para la generación del modelo CAD (Computer Aided Design) se utilizó las herramientas de exportación y generación de modelos del software SolidWorks, con el cual se prepararon los modelos de cada uno de los dedos de tal manera que quedasen en formato STEP, el cual es un formato de intercambio estándar que se utiliza para representar datos tridimensionales en un formato que pueda ser reconocido por diferentes programas. Inicialmente, en la iniciativa de InMoov dichos archivos se encuentran en formato STL, el cual un formato de archivo informático de diseño asistido por computadora (CAD) que define geometría de objetos 3D, excluyendo información como color, texturas o propiedades físicas que sí incluyen otros formatos CAD. Los archivos STL fueron utilizados para realizarse la impresión 3D de las piezas de la prótesis. Debido a esto se tuvo que realizar en algunas piezas una reconstrucción, la cual fue realizada mediante el uso de la herramienta de diagnóstico de importación donde se realizaron las correcciones necesarias en las caras y aristas que el mismo programa detectaba que poseían errores para la generación de las operaciones de construcción del modelo. En la Figura 7 se puede apreciar el entorno de SolidWorks™ y el ensamble definitivo del prototipo.
Figura 7. Ensamble definitivo del prototipo de prótesis en SolidWorks.
De la Figura 7 cabe mencionar que, para efectos de simulación, la parte del antebrazo de la prótesis será excluida debido a que esta no tiene influencia sobre el movimiento de los dedos y el control aplicado sobre estos. La construcción del prototipo de prótesis fue realizada en el módulo de ensamblaje de SolidWorks™, haciendo uso de ―relaciones de posición‖ para así generar las restricciones necesarias y de esta forma tener el prototipo listo para su simulación.
4.3 GENERACIÓN DEL PROTOTIPO DE PRÓTESIS DE BRAZO
TRANSRADIAL Y OBTENCIÓN DE LAS PROPIEDADES FÍSICAS DEL
PROTOTIPO
El prototipo que se utilizó fue posteriormente adecuado para efectos de la simulación. Dicha adecuación consistía en la definición del sistema coordenado absoluto de todo el prototipo y la definición del eje Z+ como el eje de rotación de las articulaciones en cada uno de los dedos del prototipo.
Para la obtención de las propiedades físicas y geométricas del prototipo que posteriormente serán utilizadas para la implementación de manera analítica y simulada del control de cada una de las articulaciones presentes en los dedos se hizo uso de las herramientas que proporciona SolidWorks™.
4.3.1 Masa
Para la masa se tuvo en cuenta que la prótesis va a ser fabricada mediante el proceso de impresión 3D y dicho material involucrado será el ABS. Las propiedades mecánicas y físicas del ABS fueron obtenidas del módulo de material de SolidWorks™.
4.3.2 Momento de Inercia
depende del eje de rotación determinado debido a que solo se realizan rotaciones respecto a dicho eje.
4.3.3 Centro de masa
Se determina con el fin de ser utilizado en la formulación dinámica del prototipo. Dicha propiedad sirva para obtener la energía potencial del sistema la cual está implícita en el modelo dinámico.
Las propiedades anteriormente mencionadas fueron obtenidas mediante el uso de la herramienta de propiedades físicas, la cual está dentro del módulo de ensamble de SolidWorks™, un vistazo de la herramienta se puede apreciar en la Figura 8.
Figura 8. Caja de diálogo herramienta de propiedades físicas utilizada para las propiedades
Fuente: Autor
4.4 PROCESAMIENTO DEL MODELO EN MATLAB®-SIMULINK™
(SIMMECHANICS)
4.4.1 Generalidades de Matlab®
Matlab® abreviado del inglés (MATrix LABoratory) es un programa orientado al cálculo con matrices empleadas en muchos de los algoritmos que resuelven problemas de matemática aplicada en ingeniería. Matlab® ofrece un entorno interactivo mediante una ventana en la que se pueden introducir ordenes en modo de texto y en la que aparecen los resultados. Los gráficos se muestran en ventanas independientes.
4.4.2 Generalidades de Simulink™
Simulink™ es un software de interfaz gráfica que permite modelar, simular y analizar sistemas dinámicos. Lo que permite elaborar un modelo en primera parte y luego observar como este se comporta (Toinga 2012). Además, Simulink™ tiene la capacidad de construir desde cero o con modelos ya existentes; sean sistemas lineales o no lineales, permitiendo implementar sistemas de control a los modelos. Dentro de las áreas en las que se puede usar el entorno Simulink™ se encuentran la tecnología aeroespacial y de defensa, la automatización, las comunicaciones, la electrónica y el procesamiento de señales y medicina e instrumentación.
4.4.3 Generalidades de SimMechanics
Figura 9. Entorno de simulación y visualización de Simulink™ para el prototipo.
Fuente: Autor
4.4.4 Importación del modelo CAD a Simulink™
4.4.4.1 Pasos para instalación del Plugin de conexión de SolidWorks™-Simulink™
Antes de empezar es necesario tener una licencia valida de Matlab® y tener uno de los software CAD soportados entre los que se encuentran: Autodesk Inventor™, PTC Creo™ y SolidWorks™. Matlab® y el software CAD seleccionado deben poseer la misma arquitectura en el sistema operativo (por ejemplo, Windows 64-bit). Adicionalmente, la información para la instalación del Plugin fue obtenida de la página oficial de Matlab®.
Paso 1: Obtener los archivos de instalación.
1. Ir a la página de descarga Simscape Multibody Link.
2. Seguir las instrucciones en la página de descarga.
3. Guarde el archivo Zip y el archivo de Matlab® en una carpeta determinada. Seleccione la versión de los archivos de tal manera que coincidan con la versión de Matlab® y la arquitectura del sistema operativo, para el caso del presente trabajo la versión es R2016a y Win64. No es necesario extraer el archivo Zip.
Paso 2: Ejecutar la función de instalación.
1. Ejecutar Matlab® como administrador.
2. Agregue los archivos de instalación en la ruta de Matlab®.
Es posible hacerlo dando click en addpath en Matlab® en command window. Reemplace el nombre de la carpeta con el nombre de la carpeta donde se guardaron los archivos de instalación.
3. En el command window, ingresar ‗install_addon(‗smlink.r2016a.win64.zip‘).
Paso 3: Registre Matlab® como un servidor de automatización (Automation Server)
conexión, se debe registrar Matlab® como un automation server. Esto es posible hacerlo de dos maneras:
Mientras Matlab® se está ejecutando como administrador: en command window, imgrese regmatlabserver.
En MS-DOS mientras se ejecuta como administrador: en símbolo del sistema, ingrese Matlab –regserver.
Paso 4: Habilitar el Simscape Multibody Link Plugin.
1. En MATLAB command window, ingresar smlink_linksw.
2. Iniciar SolidWorks™.
3. En el menú de herramientas, seleccionar complementos.
4. En el cuadro de diálogo de complementos, seleccione la casilla de verificación de Simscape Multibody Link en la barra de menú de SolidWorks™ cuando este inicie o habrá un ensamblaje CAD.
4.4.5 Modelo de la prótesis en Simulink
Figura 10. Visualización del ensamblaje de la prótesis en Simulink™. (a) Diagrama de bloques del modelo en Simulink™ en desorden. (b) Diagrama de bloques del modelo en
Simulink™ en orden.
(a) (b)
5 MODELO DINÁMICO PARA EL PROTOTIPO
La dinámica es la rama de la física que estudia la relación entre las fuerzas que actúan sobre un sistema y el movimiento que en él se origina. El modelo dinámico de un robot manipulador permite explicar y comprender una amplia gama de fenómenos físicos propios de su estructura mecánica. Dichos fenómenos son los efectos inerciales, fuerzas centrípetas y de Coriolis, la acción del par gravitacional y los efectos de fricción. Como se puede ver, un robot manipulador es un sistema mecánico bastante complejo.
Por su parte, la mecánica analítica es una herramienta bastante útil para la formulación de modelos matemáticos de sistemas mecánicos(Craig 1977). La descripción analítica del comportamiento dinámico de un robot manipulador requiere del uso de ecuaciones diferenciales, por su naturaleza no lineal, multivariable y acoplada(Reyes Cortés 2011b). Debido a esto el uso de ecuaciones diferenciales no lineales es ampliamente utilizado para la descripción del estudio y el análisis de los fenómenos del robot, y la construcción del modelo dinámico(Rico Mandujano 2011; F. Avilés et al. 2014; Loaiza 2012; Hernández et al. 2008b; Ouyang et al. 2018).
Los métodos que hacen uso de ecuaciones diferenciales para la descripción de sistemas mecánicos como los robots manipuladores son principalmente dos: el método de Newton-Euler y el método de Euler-Lagrange. El primero es un método de ―balance de fuerzas‖ dinámicas y el segundo es un método de ―balance de energías‖ de la dinámica (Craig 1977). Uno de los métodos más utilizados para la obtención del método dinámico de un robot manipulador está basado en las ecuaciones de movimiento de Euler-Lagrange(Reyes Cortés 2011b).
5.1 ECUACIONES DE EULER-LAGRANGE
La energía total del sistema del robot se obtiene mediante la suma de la energía cinética ̇ y de la energía potencial :
̇ ̇ [1]
Donde ̇ representan los vectores de posición y de velocidad articular, respectivamente. Se puede observar que la energía cinética ̇ tiene dependencia de la posición y de la velocidad articular, mientras que está relacionada con el campo conservativo de la gravedad, por lo tanto, depende únicamente de la posición.
El ̇ de un robot manipulador de n grados de libertad se define como la diferencia entre la energía cinética ̇ y la energía potencial :
̇ ̇ [2]
Las ecuaciones de Euler-Lagrange de un robot manipulador de n libertad están dadas por.
[ ̇
̇ ] ̇
̇ [3]
Donde [ ] representa el vector de posiciones articulares o coordenadas generalizadas, ̇ [ ̇ ̇ ̇ ] es el vector de velocidades articulares, [ ] es el vector de pares aplicados, donde el n-ésimo par se encuentra asociado con la n-ésima coordenada generalizada , y ̇ es el vector de fuerzas o pares de fricción que depende de la velocidad articular ̇ y de la fricción estática que se encuentra presente en las articulaciones; representa el tiempo, es el número de grados de libertad.
La energía cinética tiene una estructura matemática cuadrática bien definida en función de la velocidad articular:
Aquí es la matriz de inercia del manipulador, y es una matriz definida positiva (por lo tanto, simétrica). La energía potencial no tiene una forma específica. Sin embargo, tiene una dependencia exclusivamente del vector de posición .
Con esta forma del lagrangiano, las ecuaciones de movimiento de Euler-Lagrange pueden escribirse en forma compacta como:
̇ ̇ ̇[ ̇ ̇] ̇ ̇ * ̇ ̇ + ̈ ̇ ̇ ̇ [ ̇ ̇] [5]
Lo anterior permite plantear un modelo dinámico de un robot manipulador que proporciona una descripción completa de la relación entre los pares aplicados a los servomotores y el movimiento de la estructura mecánica. Con la formulación de Euler-Lagrange las ecuaciones de movimiento pueden ser obtenidas de manera sistemática, independientemente del sistema de referencia coordenado. Así, la ecuación [5] para un robot de n grados de libertad adquiere la siguiente forma:
̈ ̇ ̇ [ ̇ ̇] ̇ [6]
5.2 DETERMINACIÓN DE LOS PARÁMETROS PARA EL MODELO
DINÁMICO
El modelo dinámico de un robot manipulador de n grados de libertad está dado por la ecuación [6], que en su forma compacta y con la notación más ampliamente utilizada en el área de robótica se encuentra descrito de la forma:
Aquí se tiene que:
,es el vector de coordenadas o posiciones articulares. ̇ , es el vector de velocidades articulares.
̈ , es el vector de aceleraciones articulares.
, es la matriz de inercia, la cual es simétrica y definida positiva. ̇ , es la matriz de fuerzas centrípetas y de Coriolis.
̇ ̇ ̇ [ ̇ ̇] [8]
, es el vector de fuerzas o pares gravitacionales obtenido como el gradiente de la energía potencial, es decir:
[9]
Debido a la acción de la gravedad.
̇ , es el vector de pares de fricción que incluye la fricción viscosa, de Coulomb y estática de cada articulación del robot.
5.3 DETERMINACIÓN DEL MODELO DINÁMICO PARA UN DEDO DEL
PROTOTIPO
Para efectos de ejemplificar la obtención del modelo dinámico en un robot manipulador de 3 grados de libertad se mostrará a continuación la determinación del modelo dinámico de uno de los dedos del prototipo (meñique).
Figura 11. Robot manipulador de 3 grados de libertad.
Fuente: Autor
El significado de los símbolos que se presentan en la Figura 11 se encuentra en la Tabla 3. La cual se desarrolló con el fin de mostrar las características para cada eslabón calculando los valores de cada termino, teniendo en cuenta la información mostrada en la sección 4.3, para proceder con la determinación del modelo dinámico.
Tabla 3. Parámetros del robot de 3 grados de libertad.
Eslabón Significado Notación Valor
1
Meñique Falange 1 (MNF1)
Masa del eslabón 1
Longitud del eslabón 1
Inercia del eslabón 1 Centro de masa del eslabón
Posición articular del eslabón
1
2
Meñique Falange 2 (MNF2)
Masa del eslabón 2
Longitud del eslabón 2
Inercia del eslabón 2
Centro de masa del eslabón
2
Posición articular del eslabón
2
3
Meñique Falange 3 (MNF3)
Masa del eslabón 3
Longitud del eslabón 3
Inercia del eslabón 3
Centro de masa del eslabón
3
Posición articular del eslabón
3
Fuente: Autor
Luego del cálculo de los parámetros involucrados en el modelo dinámico, se procede a la determinación de este a partir de la siguiente metodología:
Paso 1: modelo de cinemática directa con respecto al centro de masa de cada eslabón:
Eslabón 1
[ ] [
] [10]
Eslabón 2
Eslabón 3
[ ] [
] [12]
Paso 2: la cinemática diferencial permite la obtención de la velocidad lineal con respecto al centro de masa de cada eslabón:
Eslabón 1
[ ] [
] [
] ̇ [13]
Eslabón 2 [ ] [ ] [ ] [ ̇
̇ ] [14]
Eslabón 3 [ ] [ ] [ ] [ ̇ ̇ ̇ ] [15]
La rapidez lineal del centro de masa de cada eslabón se calcula de la siguiente forma: ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ( ) ̇ ̇ ̇ ̇ ̇ (
) ̇ ̇ ̇ [16]
̇ ⁄ ⁄ ( [∑ ̇] ) ̇ ⁄ ̇ + ⁄ ̇ ̇ + ⁄ ̇ ̇ ̇ ̇ ⁄ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇
̇ ̇ ̇ ̇ [17]
La energía potencial del centro de masa para cada uno de los eslabones se expresa de la siguiente manera:
∑
Donde representa la ubicación del centro de masa respecto al origen en .
[18]
Se obtiene el lagrangiano el cual está dado por la siguiente expresión:
̇ ̇ ̇ ⁄ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ ̇ [19]
Paso 4: se aplican las ecuaciones de movimiento de Euler-Lagrange para así obtener las ecuaciones que definen los pares generalizados aplicados en cada articulación:
̈ ̇ ̇
Para efectos de simplicidad del modelo dinámico se considera que las articulaciones carecen de fricción, debido a que las articulaciones se consideran lisas. Por ende, el término ̇ se omite en la obtención del modelo dinámico del prototipo de dedo de 3 grados de libertad.
Eslabón 1
̈
̈ ̈ ̇
̇ ̇ ̇ ̇ ̇ ̇ ̇
[20]
Eslabón 2
̈ ̈
̈ ̇
̇ ̇ ̇
[21]
Eslabón 3
̈ ̈ ̈ ̇
̇ ̇ [22]
6 DISEÑO DEL SISTEMA DE INSTRUMENTACIÓN Y ADQUISICIÓN DE
DATOS
El control automático ha desempeñado un papel importante en el avance de la ingeniería y la ciencia. Se ha convertido en una parte importante e integral en los sistemas de vehículos espaciales, en los sistemas robóticos, en los procesos modernos de fabricación y en cualquier operación industrial que requiera el control de temperatura, presión, humedad, flujo, etc. Por lo anterior, es deseable que la mayoría de ingenieros y científicos estén familiarizados con la teoría y la práctica del control automático (Ogata 2013).
6.1 CONTROL DE POSICIÓN
El problema del control de posición o regulación consiste en mover el extremo final del robot manipulador hacia una posición deseada constante , independientemente de su posición inicial . Los puntos intermedios entre la posición inicial y la referencia deseada no son controlados como tal, forman parte de la etapa transitoria de la respuesta del robot incluyendo la señal de error ̃ definida como la diferencia entre la posición deseada y la posición actual del robot ̃ . El punto final es la posición clave para la cual se realiza el control (Reyes Cortés 2012).
El objetivo del problema de control de posición es encontrar una ley de control que proporcione los pares aplicados a las articulaciones o servomotores del robot, de tal forma que la posición actual del robot y la velocidad articular de movimiento ̇ tiendan asintóticamente hacia la posición deseada y a una velocidad cero, respectivamente, sin importar las condiciones iniciales. El objetivo del control de posición se ve reflejado en la siguiente ecuación:
[ ̇ ] [ ] [23]
deseado cambiará su valor, por lo que el robot se moverá hacia el siguiente punto. El punto anterior deseado representa la posición inicial y el extremo final se estará posicionando en la siguiente coordenada. Así sucesivamente, el robot describe una curva compuesta de puntos cercanos entre sí. Esta forma de control se denomina control punto a punto (Reyes Cortés 2011a, 2012). Es importante aclarar que en el control punto a punto no se controla la velocidad de movimiento, para el control de dicha variable se hace uso del control de trayectoria, donde el error de posición y el error de velocidad son controlados de forma simultánea.
6.2 CONTROL PROPORCIONAL-DERIVATIVO
El algoritmo de control proporcional-derivativo (PD) es uno de los esquemas de control más simple y popular que se puede usar en robots manipuladores (Reyes Cortés 2012; Hernández et al. 2008a; Ouyang et al. 2018). El controlador PD con compensación de la gravedad fue propuesto por Takegaki y Arimoto en el año 1981, para robots que solo cuentan con articulaciones rotativas. Entre las principales ventajas de este control se encuentra que el equilibrio deseado es globalmente asintóticamente estable si la ganancia proporcional es lo suficientemente grande.
El control proporcional-derivativo más compensación de la gravedad se encuentra expresado por la siguiente ecuación:
̃ ̇ [24]
Donde ̃ es el vector de error de posición que se define como la diferencia entre la posición deseada y la posición actual del robot ; es la ganancia proporcional la cual una matriz definida positiva, es la ganancia derivativa la cual es una matriz definida positiva.
Figura 12. Diagrama de bloques del control PD más compensación de la gravedad.
Fuente:(Reyes Cortés 2011a)
La posición articular del robot se retroalimenta para generar una señal de error de posición ̃ . La velocidad de movimiento ̇ se emplea para la inyección de amortiguamiento. Como se enuncia en (Reyes Cortés 2011a) se aprecia que el signo menos de la acción de control derivativa sirve para contrarrestar la energía del control proporcional.
6.3 SIMULACIÓN NUMÉRICA DE CONTROL PROPORCIONAL
Figura 13. Implementación del modelo dinámico para el meñique de la prótesis en Matlab®.
Fuente: Autor
respectivamente: ⁄ ⁄ ; mientras que las ganancias derivativas han sido seleccionadas con un factor de amortiguamiento del 20% del valor de las ganancias proporcional por ende las ganancias derivativa
quedaron de la siguiente manera:
⁄ ⁄ ; los valores de posición deseados fueron: [ ] , teniendo así los valores necesarios para la implementación del algoritmo de control proporcional derivativo. El algoritmo de control proporcional implementado en Matlab® se puede apreciar en la Figura 14.
Figura 14. Implementación del algoritmo de control proporcional derivativo más
Fuente: Autor
Para la solución del modelo dinámico y la simulación del control proporcional derivativo del modelo propuesto del dedo meñique de la prótesis se implementó un Script de Matlab® para la realización de dicha tarea (programa menique3gdl_simu.m ver anexo). Para la solución de las ecuaciones diferenciales presentes en el modelo dinámico se utilizó la función ode45 de Matlab®, con condiciones iniciales de posición y velocidad de; [ ] y ̇ [ ] ⁄ . La función ode45 funciona mediante solución numérica lo
Figura 15. Implementación del Script que soluciona las ecuaciones del modelo dinámico
para el dedo meñique y simulación del control PD
Fuente: Autor
Teniendo ya implementados los algoritmos que solucionan e implementan el control PD en el dedo meñique se procede la realización de la sintonización de los valores de las ganancias proporcional y derivativa para lograr los resultados esperados. Los resultados obtenidos de la implementación de los algoritmos se presentan posteriormente en el capítulo de resultados y se realiza una comparación con la implementación del control PD en Simulink™.
Para mayor detalle de la información contenida en las figuras Figura 13, Figura 14 y Figura 15, ver el apartado de Anexos donde se encuentra contenida dicha información.
6.4 SIMULACIÓN NUMÉRICA DE CONTROL PROPORCIONAL DERIVATIVO
utilizando el complemento de Simmechanics de Simulink™ para la implementación de los sensores y las condiciones iniciales que gobiernan la dinámica del sistema. La representación del diagrama de bloques para el meñique se muestra en la Figura 16.
Figura 16. Representación del diagrama de bloques del dedo meñique en Simulink™
Fuente: Autor
Figura 17. Bloque de control implementado e interior del bloque de control
Fuente: Autor
En la Figura 17 se aprecia la implementación del control PD para la articulación MCF_Mn del meñique. Adicionalmente, se observan los bloques que representan el torque aplicado sobre la articulación para la realización del movimiento y el bloque de condiciones iniciales de posición y velocidad que alimentan de forma directa el bloque de la articulación. Como se mencionó con anterioridad, la implementación del control PD se basa en el diagrama de bloques presentado en la Figura 12. Para la retroalimentación de la posición y el uso de la velocidad se utilizaron bloques que cumplen la función de sensores de posición y velocidad angular, los cuales hacen parte del complemento de Simmechanics. A partir de estos se construyó el diagrama de bloques que se muestra en la Figura 17. Cabe resaltar que los valores utilizados en las ganancias proporcional y derivativa fueron los mismos que se utilizaron en la implementación de Matlab®.
6.5 SISTEMA DE ADQUISICIÓN DE LAS SEÑALES MIOELÉCTRICAS
técnicas se muestra a continuación y fueron obtenidas de (ThalmicLabs 2018; Morán Medina 2016).
6.5.1 Myo™ Gesture Control Armband
A continuación, se realizará una breve descripción del dispositivo Myo™ Gesture Control Armband, el cual fue utilizado para la recolección de la señal de electromiografía (EMG). A más de la descripción del procedimiento que lleva a cabo el dispositivo al momento de detectar alguna señal, los elementos que componen el dispositivo, los usos principales, dicha información fue recolectada de (ThalmicLabs 2018; Morán Medina 2016).
El Myo™ Gesture Control Armband es un dispositivo portátil capaz de leer la actividad muscular del antebrazo (Figura 18), tiene la capacidad de otorgar control sin contacto con diferentes dispositivos mediante gestos y movimientos de la mano. En términos generales es un dispositivo de electromiografía (EMG) que incluye un conjunto se sensores y un procesador conectado al conjunto de sensores EMG. Según la información presentada en (Morán Medina 2016) el procesador y el conjunto de sensores EMG realizan el siguiente procedimiento:
Detecta la actividad muscular de un usuario del dispositivo EMG portátil, por medio del conjunto de sensores EMG, en que la actividad muscular corresponde a un gesto realizado por el usuario.
En respuesta a la detección de la actividad muscular del usuario, proporciona un conjunto de señales desde el conjunto de sensores EMG al procesador.
Determina un conjunto de características del conjunto de señales.
Realiza una serie de evaluaciones, mediante el análisis del árbol de decisiones, en las cuales están implicadas todas las características de la señal EMG.
Identifica el gesto realizado por el usuario, basado en parte de la puntuación de probabilidad de al menos un gesto en la biblioteca de gestos.
Figura 18. Myo™ Gesture Control Armband
Fuente: (ThalmicLabs 2018)
El dispositivo cuenta con 8 canales EMG y un IMU de 9 ejes (unidad de medición inercial), el cual es un dispositivo que mide velocidad, orientación y fuerzas gravitacionales, por medio de acelerómetros y giroscopios. Los datos EMG se transmiten a 200 Hz, mientras los datos del IMU lo hacen a 50 Hz. Esas velocidades no pueden ser modificadas. Entre los usos más comunes de la Myo™ destacan: el uso en presentaciones, control de ratón y teclado; además, tiene la particularidad de usarse para aplicaciones como Spotify, Netflix, YouTube entre otras. Una de las aplicaciones más particulares es el uso en videojuegos y en otros dispositivos como drones como los parrot y en robots como el Sphero (ThalmicLabs 2018).
Figura 19. Características de la Myo™.
Fuente: (ThalmicLabs 2018; Morán Medina 2016)
6.5.1.1 Especificaciones técnicas
A continuación, se muestran algunas de las características de software y hardware de la Myo™ Gesture Control Armband(ThalmicLabs 2018).
El dispositivo incluye una versión de la Myo™ Gesture Control Armband, un cable Micro-USB para recargar y encender el dispositivo, un adaptador de Bluetooth® para conexión con el computador. Además, de 10 clips que facilitan la adaptabilidad de dispositivo a cualquier grosor de antebrazo.
El dispositivo tiene un peso de 93 gramos.
El espesor de la Myo™ es de aproximadamente 1.143 cm (0.45 pulgadas).
Hardware:
Sensores EMG de acero inoxidable de grado médico.
Sensor IMU de nueve ejes altamente sensibles con giroscopio de tres ejes, acelerómetro de tres ejes y magnetómetro de tres ejes. Posee dos indicadores LED.
Procesador ARM Cortex M4.
Retroalimentación háptica: Vibraciones cortas, medias y largas.
Batería recargable de ion de litio. Además, otorga la autonomía de un día de uso completo de una sola carga.
6.5.2 Adquisición de datos
Figura 20. Músculos anteriores y laterales del antebrazo (plano superficial) y Músculos
laterales y plano profundo de los músculos posteriores del antebrazo.
Fuente: (Rouviére y Delmas 2005)
Los músculos del antebrazo se dividen en tres grupos: anterior, lateral y posterior, para el caso de los músculos involucrados en el movimiento de los dedos de la mano, y se tomarán los músculos de los grupos anterior y posterior y un musculo lateral.
Músculos del grupo anterior:
proximal, la falange proximal sobre el hueso metacarpiano y la mano sobre el antebrazo.
Músculos lumbricales: son los encargados de flexionar la falange proximal y extienden las otras dos.
Músculo flexor largo del pulgar: flexiona la falange distal sobre la proximal y ésta sobre el primer hueso metacarpiano.
Músculo flexor superficial de los dedos: flexiona la falange media sobre la falange proximal, esta última sobre el hueso metacarpiano y la mano sobre el antebrazo.
Músculo lateral:
Músculo supinador: imprime al antebrazo un movimiento de rotación que desplaza el dedo pulgar lateralmente y la palma de la mano anteriormente. Músculos del grupo posterior:
Músculo abductor largo del pulgar: desplaza el dedo pulgar lateral y anteriormente.
Musculo extensor corto del pulgar: es extensor y abductor del dedo pulgar y de su metacarpiano.
Musculo extensor largo del pulgar: extiende la falange distal sobre la falange proximal, la falange proximal sobre el primer metacarpiano y éste sobre el carpo.
Músculo extensor del índice: extiende el índice.
Músculo extensor de los dedos: extiende las falanges media y distal sobre la proximal, la falange proximal sobre el metacarpo, y este sobre el antebrazo.
Figura 21. Ubicación de la Myo™.
Fuente: Autor
El dispositivo Myo™ band posee 8 canales de señal correspondientes a los 8 sensores SEMG, los cuales toman las señales de manera simultánea, para el seguimiento y posterior tratamiento de las señales se conectó el dispositivo con Matlab®, con el que se generó un registro de las señales para cada uno de los canales. A partir, de una interfaz de código abierto disponible en internet; los pasos para la conexión de Myo™ con Matlab® se muestra a continuación:
1. Se descarga de la página web GitHub, el paquete MyoMex, desarrollado por Mark Tomaszewski y está disponible en https://github.com/mark-toma/MyoMex, el cual, en conjunto con el paquete de Windows SDK, permite el flujo de información entre la Myo™ y Matlab®.
2. Se descarga el paquete Windows SDK 0.9.0, el cual está disponible en la página oficial de Myo™.
https://developer.thalmic.com/login/?next=/downloads
compilador soportado es necesario en el command window de Matlab® ingresar mex –setup, en caso de presentar un error lo más recomendable es instalar un compilador que soporte, para el caso de este trabajo se configuro con el compilador MinGw-w64, el cual para la versión que se utilizó para este caso MatlabR2016a funciono de manera correcta.
Nota: en caso de no funcionar MinGw-w64, por favor consulte
https://la.mathworks.com/support/compilers.html, para más información para los compiladores soportados para diferentes versiones de Matlab®. 4. Luego es necesario en el command window de Matlab® y estando en la
ruta que contiene los archivos de MyoMex descargados anteriormente ejecute lo siguiente: install_myo_mex. Para guardar la ruta especificada de los archivos es necesario ejecutar install_myo_mex save.
5. Posteriormente se debe crear la ruta donde se desea guardar el fichero Windows SDK 0.9.0, lo cual se realiza de la siguiente manera: sdk_path = 'C:\myo-sdk-win-0.9.0', la ruta mostrada que contiene el fichero es opcional, el usuario puede ubicar la ruta donde desee.
6. Luego de esto es necesario que se construya el entorno de MyoMex para esto se ejecuta el siguiente comando: build_myo_mex(sdk_path), luego de estos pasos ya es posible establecer conexión entre Matlab® y Myo™, en caso de errores consulte el apartado 3 para verificar si el compilador se instaló de forma correcta.
Figura 22. Visualización de la interfaz de usuario por defecto en el paquete MyoMex.
Fuente: Autor
En la Figura 22, la interfaz de usuario muestra los diferentes datos que puede transmitir la Myo™, entre las que se encuentran la orientación, el giroscopio, el acelerómetro, una visualización de la posición del dispositivo, las señales EMG con sus 8 canales y una imagen del gesto que se esté presentando en el momento. Debido a que para el desarrollo del experimento es necesario el desarrollo de una GUI que pueda mostrar la actividad de los canales de señal EMG de forma individual y se puedan visualizar en forma simultánea.
Figura 23. Interfaz de usuario desarrollada para la fase experimental.
Fuente: Autor
En la Figura 23 se puede apreciar la interfaz de usuario que se desarrolló con la finalidad de tener una mayor percepción de la actividad de los sensores, mientras se ejecuta un movimiento determinado.
6.5.3 Desarrollo experimental
Para obtener las muestras de los movimientos de cada uno de los dedos y de esta manera establecer las características que puedan ser utilizadas para la generación de los parámetros utilizados para el posterior control de la prótesis se desarrolló la siguiente fase experimental:
2. El sujeto de prueba debe iniciar con una postura relajada del músculo esto indica que no deba ejercer ningún esfuerzo alguno, por lo que es necesario que este tenga el brazo extendido hacia abajo.
3. Ejecutar la interfaz de usuario mostrada en la Figura 23, para la inicialización del muestreo de las señales.
4. Mediante la orden de la persona encargada de ejecutar el programa, el sujeto de prueba desarrolla alguno de los movimientos mostrados en la Figura 24, por aproximadamente 5 segundos de forma repetida.
5. Pasados los 5 segundos de movimiento de los dedos según la figura, el sujeto de prueba debe volver al estado de reposo con el fin de estabilizar la lectura de las señales EMG.
6. Las lecturas obtenidas de los pasos 4 y 5, son tratadas de forma directa mientras se ejecuta la interfaz de usuario con el fin de realizar el tratamiento de la señal de forma simultánea.
7. Los resultados obtenidos del tratamiento de la señal son registrados en una hoja de Excel donde se establecerán las características del comportamiento de cada uno de los canales implicados en los movimientos.
Figura 24. De izquierda a derecha: posición de reposo, movimiento del pulgar, movimiento
del índice, movimiento del dedo medio, movimiento del anular y movimiento del meñique.
Luego de la toma de datos se procede con el tratamiento de la señal, el cual se hace mediante el uso de la transformada de Hilbert y del software Matlab®, haciendo uso del comando hilbert(), el cual genera una función que representa la envolvente de la señal que representa por así decirlo genera un área, para posteriormente calcular el área bajo la curva mediante el uso de la función rms(), con la que se determinara el área bajo la curva de cada uno de los canales de la señal EMG; en base a esto se utilizara este término para realizar la caracterización de la actividad de cada uno de los canales involucrados en los movimientos establecidos con anterioridad. En la Figura 25 se representa la señal, la envolvente y el valor del área bajo la curva para un canal determinado con el fin de hacer la demostración de la estrategia.
Figura 25. Representación de la señal tratada, para el caso de una de las tomas
experimentales del dedo medio para el canal EMG1.
7 RESULTADOS
7.1 RESULTADOS DE LA SIMULACIÓN NUMÉRICA DEL CONTROL
PROPORCIONAL DERIVATIVO
Teniendo en cuenta los algoritmos enunciados en la sección 6.3, se muestran a continuación los resultados obtenidos de la simulación numérica del control proporcional derivativo; resolviendo las ecuaciones del modelo dinámico que para este caso el dedo meñique del modelo de prótesis establecido. Las ganancias proporcional y derivativa fueron sintonizadas de forma tal que no se produzcan sobre impulsos, ni oscilaciones en el régimen transitorio, asi como una respuesta suave en estado estacionario. El valor de sintonía de las ganancias proporcional para las articulaciones presentes en el modelo del dedo meñique, son respectivamente: ⁄ ⁄ ; por otro lado los valores de sintonía de las ganancias derivativas fueron seleccionadas con un valor de ⁄ ⁄ .
7.1.1 Errores de posición ̃
La Gráfica 1 muestra el error de posición resultado de la solución numérica del control proporcional derivativo. Teniendo en cuenta que con la implementación del bloque de control se busca que el error de posición tienda a cero, mientras el tiempo tienda a infinito; dicha característica puede ser observada en la Gráfica 1. Además, se percibe un perfil suave, sin sobre impulsos, sin oscilaciones pronunciadas, con un tiempo de establecimiento aproximadamente de 1.35 segundos, lo cual representa una respuesta aceptable para el movimiento del dedo meñique.
Gráfica 1. Error de posición de las articulaciones en el meñique.
Fuente: Autor
7.1.2 Pares aplicados
cumpla con las características que demanda el sistema para su correcto funcionamiento, los valores de torque para cada una de las articulaciones fueron los siguientes: [ ] .
Gráfica 2. Pares aplicados sobre las articulaciones en el meñique.
Fuente: Autor
7.1.3 Velocidad Angular ̇
Gráfica 3. velocidad angular de las articulaciones en el meñique.
Fuente: Autor
7.1.4 Posición de las articulaciones
Gráfica 4. Posiciones articulares de las articulaciones en el meñique.
Fuente: Autor
7.2 RESULTADOS DESARROLLO EXPERIMENTAL
En la sección 6.5.3 se explicó el procedimiento experimental que se llevó a cabo para la determinación de los parámetros necesarios para la identificación de los movimientos de los dedos. Para la fase experimental se tomaron 10 registros por cada movimiento de los dedos, de esta manera es más sencillo establecer una tendencia par la identificación del movimiento.
7.2.1 Resultados obtenidos para el dedo Pulgar
Las señales generadas por el movimiento del dedo pulgar en términos generales fueron producidas por la acción de los músculos: flexor largo, supinador y el extensor largo y corto. Por ende, la Gráfica 5 posee características de baja intensidad debido a que en su mayoría los músculos involucrados en el movimiento son músculos internos y las señales no son demasiado fuertes en comparación con los músculos superficiales.
Gráfica 5. Actividad de la envolvente promediopara el dedo pulgar.
Fuente: Autor
Otra característica importante que cabe destacar es la presencia de alta actividad que se genera durante la flexión que para el caso de la gráfica es la presente en los canales 6 y 8, pero aun así la actividad es demasiado baja con respecto a la de los demás dedos.
7.2.2 Resultados obtenidos para el dedo Índice, Medio y Anular