IGNACIO ELIZALDE MARTÍNEZ ENERO – JUNIO 2012 22
Capitulo II
CALCULO VECTORIAL
2.1 Cálculo vectorial
El cálculo vectorial se utiliza para el análisis de problemas de ingeniería ya que provee de las herramientas necesarias para describir las variaciones espaciales como desplazamiento, velocidad y aceleración que experimentan las partículas o elementos materiales que se mueven a lo largo de una trayectoria así como también proporciona los elementos para analizar funciones que dependen de más de una variable independiente que aparecen frecuentemente en ingeniería en problemas asociados con optimización entre otras aplicaciones a las ciencias e ingeniería.
2.1.1 Funciones vectoriales de una y varias variables.
Funciones vectoriales de una variable
Una función escalar (o una función de una variable) es una expresión matemática cuyo variable independiente es un escalar y su variable dependiente es un escalar y su regla de correspondencia es: regla
f
: .Una función vectorial de variable real tiene como regla de correspondencia
f
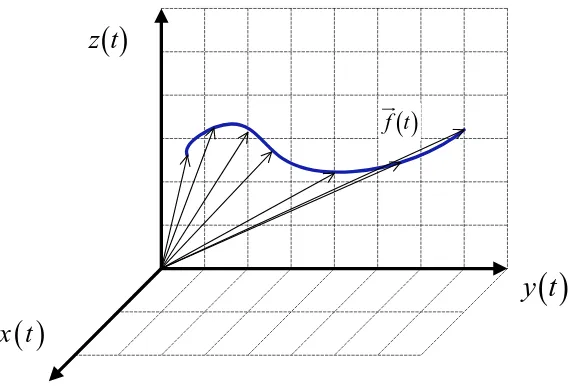
: n, es decir tiene como dominio números reales y como imagen vectores. Por ejemplo, considerando las coordenadas del espacio, la siguiente es una función vectorial:
f t =
x
t ,y
t ,z
t , donde t es un parámetro comprendido en el intervaloa t b
.La representación de la función vectorial en el espacio euclidiano se muestra en la siguiente figura:
x t
y t
z t
f t
[image:1.612.189.475.462.656.2]IGNACIO ELIZALDE MARTÍNEZ ENERO – JUNIO 2012 23
cos
, e
,
f t
t s n t t
, o de forma alternativa:
cos
e
f t
t i s n t j t k
,
,
f t
t t
21
t
Grafica de funciones vectoriales.
La gráfica de una función vectorial en el plano o en el espacio se origina uniendo un conjunto de puntos. Dicho gráfico recibe el nombre de gráfico de línea para distinguirlo de los gráficos de superficie que se verán más adelante.
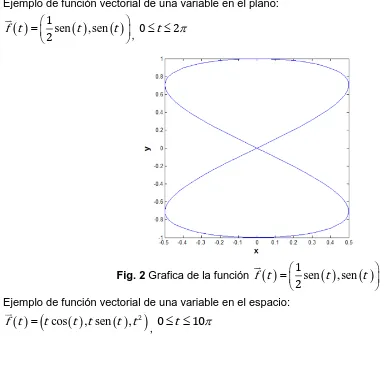
Ejemplo de función vectorial de una variable en el plano:
sen
,sen
f t
t
t
1
2
,0
t
2
Fig. 2 Grafica de la función
f t
sen
t
,sen
t
1 2
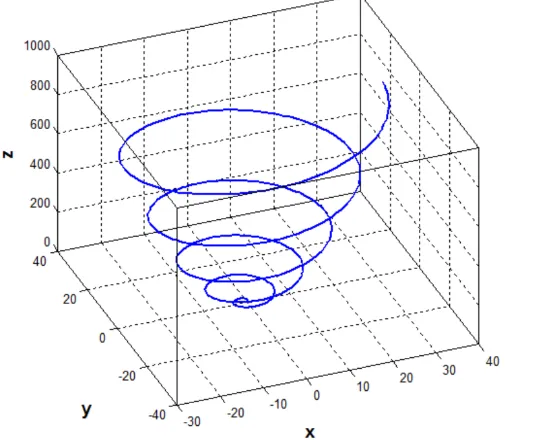
Ejemplo de función vectorial de una variable en el espacio:
cos
, sen
,
f t
t
t t
t t
2 [image:2.612.82.468.227.604.2]IGNACIO ELIZALDE MARTÍNEZ ENERO – JUNIO 2012 24
Fig. 3 Grafica de la función
f t
t
cos
t t
, sen
t t
, 2
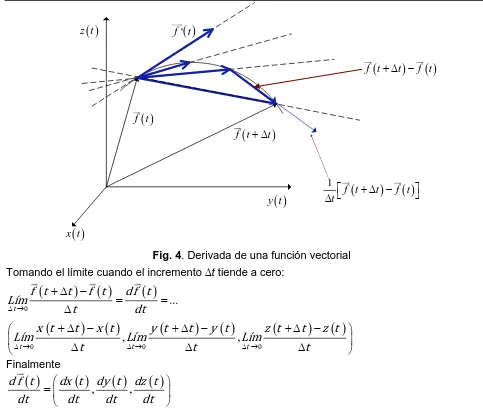
.2.1.2 Cálculo diferencial de funciones vectoriales.
Dado el vector
f t
x t y t z t
, ,
, si se incrementa la variable en un t, el vector evaluado en el valor incrementado (ver Fig. 4) es:
,
,
f t
t
x t
t y t
t z t
t
Restando de la ecuación incrementada la ecuación original,
,
,
, ,
f t
t
f t
x t
t y t
t z t
t
x t y t z t
,
,
f t
t
f t
x t
t
x t y t
t
y t z t
t
z t
Dividiendo por el incremento,
, ,
f t
t
f t
x t
t
x t
y t
t
y t z t
t
z t
t
t
t
t
[image:3.612.205.484.81.301.2]IGNACIO ELIZALDE MARTÍNEZ ENERO – JUNIO 2012 25
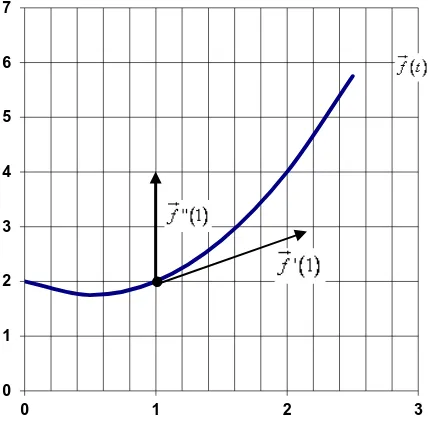
f t t
f t
f t t f t
'f t
y t
z t
x t
1
t f t t f t
Fig. 4. Derivada de una función vectorial Tomando el límite cuando el incremento t tiende a cero:
... t
f t
t
f t
d f t
Lím
t
dt
0
,
,
t t t
x t
t
x t
y t
t
y t
z t
t
z t
Lím
Lím
Lím
t
t
t
0 0 0
Finalmente
, ,
d f t
dx t dy t dz t
dt
dt
dt
dt
Es decir, la derivada de una función vectorial de variable real es otro vector cuyas componentes son las derivadas de los componentes de la función vectorial.
Velocidad
Sea
f t
f t f t f t
1
, 2 , 3
una función que describe la posición de una partícula, entonces su velocidad está dada por
'
' '
' , ,
v t
f t
f t f t f t
1 2 3 ; la rapidez está dada por la magnitud de la velocidad:
'
'
'
v t
f t
1 2f t
2 2f t
3 2Aceleración
''
'' ''
'' , ,
a t
f t
f t f t f t
1 2 3 , cuya magnitud se calcula con: [image:4.612.79.562.75.484.2]IGNACIO ELIZALDE MARTÍNEZ ENERO – JUNIO 2012 26 Recta tangente a una trayectoria.
La recta tangente a una trayectoria se calcula como:
'
l t
f t
0 f t
0t t
0Reglas de derivación de funciones vectoriales de variable real: Sean
a t b t
, funciones vectoriales y
una función escalar:1) Regla de la suma algebraica
'
'
d
a t
b t
a t
b t
dt
2) Multiplicación por una función escalar
'
'
d
t b t
t b t
t b t
dt
3) Producto escalar
'
'
d
a t b t
a t b t
a t b t
dt
4) Producto vectorial
'
'
d
a t
b t
a t
b t
a t
b t
dt
5) Regla de la cadena o derivación de funciones compuestas
'
'
d
a
t
a
t
t
dt
Geometría diferencial
Vector tangente unitario, vector normal unitario, vector binormal El vector tangente unitario se define como:
'
'
f t
T t
f t
Mientras que el vector unitario es:
'
'
T t
N t
T t
El vector binormal es el producto vectorial del vector tangente y el vector normal:
B t
T t X N t
IGNACIO ELIZALDE MARTÍNEZ ENERO – JUNIO 2012 27
'
/
/
'
T t
dT
dT dt
dS
dS dt
f t
, o bien,
'
''
'
f t X f t
f t
3Mientras que el radio de curvatura se define como el recíproco de la curvatura:
1
Problemas de aplicación de velocidad y aceleración.
Calcule en cada caso la velocidad y la aceleración dadas las siguientes trayectorias en los puntos especificados:
Problema 1:
, tf t
t e
ent
1
Solución
Derivando:
f t
’
V t
1,e
t , donde v es la velocidad. Derivando ahora al vector velocidad:
’ , t
V t
a t
0e
, con a como la aceleración. Evaluando:
,V
1 1e
;
a
1 0,e
Problema 2:
,
f t
t t
2t
t
1
Solución
Derivando:
f t
’
V t
1 2,t
1
. Derivando ahora a v:V t
’
a t
0 2, Si se evalúan la velocidad y la aceleración:V
1 1 3, ,a
1 0 2,Problema 3:
cos
,
f t
t
2sen t
,t
/
4
Solución
Derivando:
f t
’
V t
sen t
, cos2
t
. Derivando ahora a v:
’ cos ,
V t
a t
t
2sen t
,
V
2 2
4 2 ;
a
,
2 2
4 2
Problema 4:
IGNACIO ELIZALDE MARTÍNEZ ENERO – JUNIO 2012 28
Solución
Derivando:
f t
’
V t
,
,cos
t
t
1
2
2
1
Derivando ahora a v:
’
,
,
V t
a t
sen t
t
3
1
0
4
1
Problema 5:
cos
, sen
,
f t
t
t t
t t
2Solución
Derivando:
f t
’
V t
cos
t
t
sen
t t
, cos
t
sen
t
,2t
La representación de la derivada en varios puntos de la curva se muestra a continuación:
Fig. 5. Representación de la función vectorial y su derivada. La aceleración es entonces:
f
’’
t
cos
t
2t
sen
t
, cos2
t
t
sen
t
,2
Problema 6: Dada la trayectoria en un plano de una partícula descrita por la función vectorial
,
f t
t t
2 t
2 , representar: la trayectoria, el vector velocidad y el vector aceleración en elinstante t=1
' ,
IGNACIO ELIZALDE MARTÍNEZ ENERO – JUNIO 2012 29
Fig. 6 Representación de la trayectoria, la velocidad y aceleración del problema 5.
Suponiendo que la partícula de la trayectoria anterior en el instante 1 sale por la tangente, en el instante t=2, ¿Cuál será su posición?
, ,
, ,
,
,
l t
1 2 1 1t
1 1 2 t
1t
1 1t
1 2 t
1 t t
1
,l
3 3 4Problema 7. Una partícula se mueve sobre una hipocicloide
3 3
cos
c t t isen t j
. Calcule la velocidad de la partícula en el instante
t
/ 4
. Muestre que la rapidez de la partícula en cualquier instante esc t
'
3
sen t
cos
t
Problema 8. La trayectoria de una partícula está dada por:
1 cos
cos
c t t sen t isen t t j
. Calcule la velocidad de la partícula en el instante
/ 4
t
. Muestre que la rapidez de la partícula en cualquier instante es independiente de t e igual a
'
2
c t
Halle: vector tangente unitario, normal y binormal dadas las siguientes funciones vectoriales.
Problema 9
,f t
t t
2t
1
Solución
Derivando el vector posición y calculando su magnitud:
’ ,
f t
1 2t
,f t
’
1 4t
2; Entonces el vector tangente unitario es: 01 2 3 4 5 6 7
[image:8.612.223.437.88.299.2]IGNACIO ELIZALDE MARTÍNEZ ENERO – JUNIO 2012 30
,t
T t
t
2
1 2
1 4 ; Entonces evaluando el vector tangente unitario en el punto especificado:
,
T
1
1
1 2
5
Para el cálculo de el vector normal ahora se deriva el vector tangente unitario:
/
/’
d
,
,
d
T t
t
t
t
t
dt
dt
1 4
2 1 21 2
1 2
1 4
2 1 2;
/
/’
,
,
T t
1 4
t
2 1 20 2
1
1 2
t
1 4
t
2 3 28
t
2
,
,
’
t t
T t
t
t
2
2 30 2
1
1 2 8
2
1 4
1 4
o bien
j
i
j
’
t
t
t
T t
t
2 2 3 22 1 4
4
8
1 4
i+ j
’
t
T t
t
2 34
2
1 4
; Ahora se calcula la magnitud de la derivada del vector tangente unitario:
’
T t
t
t
2 2 2 3 21
4
2
1 4
’t
T t
t
2 3 24 4 1
1 4 ; Finalmente:
T t
’
t
2
2
t
21
2
2
1 4
1 4
Entonces el vector normal de acuerdo a su definición es:
i+ jt
t
N t
t
3 2 2 4 2 1 4 2 1 4,
N t
t
i+jt
2
2
1 4 ; Evaluando el vector normal en el punto especificado:
i+j
N
1
2
5
IGNACIO ELIZALDE MARTÍNEZ ENERO – JUNIO 2012 31
i
j
k
’
T t
N t
t
t
t
2 2
1
1
2
0
1 4
2
1 0
;
kB t
t
t
2 2 21 1 4
1 4
;
B t
k ; Entonces:
kB
1 Problema 10
,f t
t t
3t
1
Solución
’ ,
f t
1 3t
2
’
f t
1 2 3t
2 2 1 9t
4;
T t
,
t
t
2 41 3
1 9
;
,
T
1
1 3
10
/
/’
d
,
,
d
T t
t
t
t
t
dt
dt
1 9
4 1 21 3
2
1 3
21 9
4 1 2
/
/’
,
,
T t
1 9
t
4 1 20 6
t
1
1 3
t
21 9
t
4 3 236
t
32
,
,
’
t
t
t
T t
t
t
2 3
4 4 3
1 3
36
0 6
1
2
1 9
1 9
;
,
,
’
t
t
t
t
T t
t
4 2 3
3 4
0 6
1 9
1 3
18
1 9
j
i
’
t
t
T t
t
3 3 43
6
1 9
;
2’
T t
t
t
t
2 2 3 3 46
3
1 9
.
’
t
T t
t
t
2 4 3 46
1 9
1 9
;’
t
t
T t
t
t
2 2 4 46
6
1 9
1 9
i+ j
t
t
t
N t
t
t
3 3 4 43
6
1 9
6
1 9
;
N t
t
i+ jt
2 4 34 9 ;
i+ j
N
1 313
i
j
k
T t
N t
t
t
t
2 2 4 21
1
3
0
1 9
3
1
0
;
B t
t
k
t
4 4
1
1 9
IGNACIO ELIZALDE MARTÍNEZ ENERO – JUNIO 2012 32
Problema 11
t,
f t
e t
2t
1
Solución
’ t,
f t
e
2t
;f t
’
e
2t 4t
2
e t
tt,
T t
e
t
2 22
4
;
,
e
T
e
22
1
4
Derivando:
/
/’
td
t,
t,
d
tT t
e
t
e t
e t
e
t
dt
dt
2
4
2 1 22
2
2
4
2 1 2
/
/
’
t t,
t,
t tT t
e
2
4
t
2 1 2e
2
1
e t e
2
2
4
t
2 3 22
e
2
8
t
2
, simplificando:
,
,
’
t t t t
t
e
e
t
e t
e
t
T t
e
t
2 2 2
3
2 2
2
2
4
2
2
8
2
4
;
,
,
’
t t t t
t
e
e
t
e t e
t
T t
e
t
2 2 2
3
2 2
2
4
2
4
4
, desarrollando:
i
i
j
j
’
t t t t t t
t
e
e
t
e
e
t
e
t
t e
t
T t
e
t
2 2 2 2 2 2
3
2 2
4
4
2
4
2
4
4
, simplificando:
i
j
’
t t t t t
t
e e
t
e
t
e
t
te
t
T t
e
t
2 2 2 2 2 2 2
3
2 2
4
4
2
4
4
4
i
j
’
t t tte t
e
t
T t
e
t
2 3 2 24
1
2
1
4
;
i
j
’
t t te t
t
e
T t
e
t
3 2 22
1 2
4
.
Magnitud de la derivada del vector tangente unitario:
’
t t te t
T t
t
e
e
t
2 2 2 3 2 22
1
2
4
;
’
t tt
T t
e t
t
e
e
t
2 2 3 2 21
2
1
4
4
’
tt
T t
e t
e
t
2 2 21
2
1
4
;
IGNACIO ELIZALDE MARTÍNEZ ENERO – JUNIO 2012 33
i
j
t t
t t t
e t
t
e
e
t
N t
e t
e
t
3
2 2
2 2
2
1 2
4
2
1
4
;
i j t tt
e
N t
e
t
2 2
2
4 :
i
e
jN
e
2
2 1
4
Vector binormal:
tk
t t
i
j
k
T t
N t
e
t
e
t
t
e
2
2 2
1
2
0
4
2
0
;
B t
k;
B
1 kProblema 12
cos
,
,
f t
t sen t
3t
Solución
Derivando:
f t
’
sen t
,cos
t
,
3
Magnitud de la derivada:
’ cos
f t
sen t
2t
2 32,f t
’
sen t
2
cos2
t
3,f t
’
2
, cos
,
T t
1
sen t
t
3
2
La derivada del vector unitario es entonces:
’
cos
,
,
T t
1
t
sen t
0
2
Y su magnitud es:
’ cos
T t
t
sen t
2
2 2
1
2 ,
T t
’
1 2
/
Por lo tanto el vector normal unitario es:
cos
,
,
N t
t
sen t
0 y el vector unitario binormal es:
cos cos
i
j
k
T t
N t
sen t
t
t
sen t
1 3
2
0
;
cos
cos
T t
N t
1
3
sen t i
1
3
t j
1
sen t
2
2t k
2
2
2
i
cos
j k
B t
1
3
sen t
3
t
2
IGNACIO ELIZALDE MARTÍNEZ ENERO – JUNIO 2012 34 Sean y conjuntos abiertos. Sean y funciones tales que lleva en de la forma que está definida. Si se supone que es diferenciable en
y que es diferenciable en ( ). Entonces es diferenciable en y ( )( ) ( ) ( )
Primer caso especial de la regla de la cadena
Supóngase que es una trayectoria diferenciable y que . Sea ( ) ( ( )) ( ( ) ( ) ( )) con ( ) ( ( ) ( ) ( )), entonces:
O de forma más compacta:
( ( )) ( )
Segundo caso especial de la regla de la cadena
Sea y , entonces se puede escribir como: ( ) ( ( ) ( ) ( )) Y se define de la siguiente manera:
( ) ( ( ) ( ) ( )) Para esta función, la regla de la cadena es:
[
] [
]
[
]
Derivación implícita
La regla de la cadena expuesta con anterioridad se emplea para hallar la derivada de forma implícita. Por ejemplo, una ecuación de la forma
F x y
,
define ay
implícitamente como una función diferenciable dex
es decir,y f x
( )
, dondeF x f x
,
0 para todax
en el dominio def
. SiF
es diferenciable se aplica del primer caso de la regla de la cadena para derivar ambos lados deF x f x
,
0 con respecto ax
. Entonces:
F dx
F dy
x dx
y dx
0
Si
F
y
0
se puede despejardy
dx
de donde se obtiene:
x y
F
F
dy
x
F
dx
F
IGNACIO ELIZALDE MARTÍNEZ ENERO – JUNIO 2012 35
Problema 1 Sea:
z x
3
y
2, dondex
cos
t
y
y sen t
, halledz
zt
dz
z dx
z dy
zt
x dt
x dt
cos
dz
x sen t
y
t
zt
2
3
2
Problema 2 Obtener
F
y
F
r
t
dada la siguiente función:F x y
,
xy x
2, donde
cos ,
t t
x e
r
y e sen r
.
Usando segundo caso de la regla de la cadena:
;
F
F x
F y
F
F x
F y
r
x r
y r
t
x t
y t
Cálculo de las derivadas parciales:
F
y
x
x
2
t
x
e sen r
r
cos
t
x
e
r
t
F
x
y
tcos
y
e
r
r
t
y
e sen r
t
Sustituyendo
cos
cos
cos
t t t t t
F
e sen r
e
r
e sen r
e
r e
r
r
2
1
cos
cos
t t t
F
e sen r
e sen r
r
e
r
r
2 2
2
2 2 2Simplificando
cos
cos
t t
F
e
r
sen r
e sen r
r
r
2 2 2
2
2
cos
tF
e
r
sen r
r
2
2
2
Sustituyendo
cos
cos
cos
t t t t t
F
e sen r
e
r e
r
e
r e sen r
t
2
cos
cos
cos
t t t
F
e sen r
r
e
r
e sen r
r
t
2
2
2 2 2
cos
tF
e
sen r
r
t
2
2
2
1
Problema 3 Obtener
F
y
F
r
t
dada la siguiente función:F x y
,
x
cos
y
, donde ,x r t y t r
IGNACIO ELIZALDE MARTÍNEZ ENERO – JUNIO 2012 36
;
F
F x
F y
F
F x
F y
r
x r
y r
t
x t
y t
cos
F
y
x
x
t
r
x
r
t
t
2
F
xsen y
y
y
t
r
r
2
y
r
t
cos
F
t
y
t
xsen y
r
t
2
,cos
F
t
t r
rtsen t r
r
1
2
cos
F
y
r
xsen y
r
r
t
2
,cos
F
r
t r
r rt sen t r
r
t
2
Problema 4 Obtener
dy
dx
dada la siguiente funciónx
y
2 2
1 0
. Usando la derivación implícita:
xF
2
x
;
F
y
2
y
dy
x
x
dx
y
y
2
2
Problema 5 Usando la derivación implícita obtener R
df
dN
dada la siguiente función
10
1 1 2.51
2log
3.7 D/ R
f N f
. Sol.
10 10
10.04 log e
3.7 / 2.51 5.02 log e
R R R
f df
dN N D N f f
Problema 6 Derive implícitamente para hallar
dy
dx
dada
2
2
y
x
y
x
C
Sol.
y
'
2
xy
xy
x
Problema 7 Obtener
F
y
F
r
t
dada la siguiente función:
,
F x y
xy y
2, donde
x e sen r
t
,y
e
t cos
r
IGNACIO ELIZALDE MARTÍNEZ ENERO – JUNIO 2012 37
cos
tF
e
r
sen r
r
2
2
2
y
F
e
tsen r
cos
r
t
2
2
2
1
Problema 8 Obtener
F
y
F
r
t
dada la siguiente función:F x y
,
y
tan
x
, donde ,r
t
x
y
t
r
R. Parcial
sec tan
F
r
r
r
rt
t
r t
t
2 3
1 1
2
Problema 9 Aplicando la regla de la cadena, transformar la siguiente ecuación diferencial a su forma adimensional:
z
d c
u
dc
kc
dy
dy
22 0Con las siguientes sustituciones:
;
;
z
uL
kL
c
z
Pe
R
f
y
u
c
L
0
Solución
dc
dc df d
dz df d dz
;z
d
d c f
dc
c
d
L
df
df
dz
dz
L
0
0
1
, por lo tanto,
dc
df
c
dz
L d
0
1
La segunda derivada de “c” respecto a “z” es:
d c
d
d
dz
dz dz
2
2 ;
d
d d
d
dz d dz
L d
1
Entonces,
c
d c
d f
dz
L d
2 2
0
2 2 2 Sustituyendo en la ecuación
z
c
d f
uc
df
kc f
L d
L d
2
0 0
0
2 2 ; dividiendo por “c0” y multiplicando por “L/u”
z
d f
df
kL
f
uL d
d
u
2
2 , sustituyendo los grupos de constantes, finalmente se obtiene:
d f
df
Rf
Pe d
d
2 2
IGNACIO ELIZALDE MARTÍNEZ ENERO – JUNIO 2012 38
Problema 10 Aplicando la regla de la cadena, transformar la siguiente ecuación diferencial a su forma adimensional:
A A A A
a r B A
C
C
C
C
u
D
D
k C
z
z
r
r
r
2 2
2 2
1
Use:
0
A A
C C f ;
R r
;L z
;A
L
R
; Pea
a
uL
D
, Per
r
uR
D
Sol.
Pe
aPe
r Bf
f
A
f
f
L k
f
u
2 2
2 2
1
1
2.1.4 Máximos y mínimos de funciones de 2 variables.
Campos escalares
Una función escalar que toma valores en los puntos del espacio se dice que es una función escalar de punto o un campo escalar.
A cada punto P(x,y,z), la función le hace corresponder un número (x,y,z); es una aplicación de R3 en R. Aunque no es necesario que esté expresada en función de las coordenadas cartesianas, será lo más habitual.
La regla de correspondencia es: : n
f
Por ejemplo
z
1x y
IGNACIO ELIZALDE MARTÍNEZ ENERO – JUNIO 2012 39
Fig. 7 Gráfica de un plano
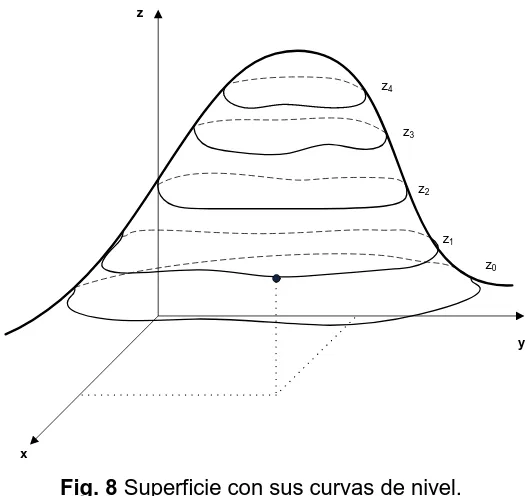
Conjuntos de nivel. Las curvas o conjuntos de nivel de una función de dos variables independientes o campo escalar son las curvas con ecuaciones
f x y
,
k
donde k es una constante. Por ejemplo, en la Figura 8 se muestra una superficie con algunas curvas de nivel (z
1,z
2, etc.)z0
z1
z2
z3
z4
x
y z
Fig. 8 Superficie con sus curvas de nivel.
[image:18.612.196.465.84.340.2] [image:18.612.200.466.411.659.2]IGNACIO ELIZALDE MARTÍNEZ ENERO – JUNIO 2012 40 Sea la función
f x y
,
x
2
y
2Algunas curvas de nivel son:
x
2y
21
,
x
y
2 2
4
Es decir, circunferencias cuyo radio es 1 y 2 unidades, respectivamente.
Secciones de una función de dos variables. Se originan en la intersección de los planos en la dirección
x z
,y z
con la función.Ejemplo.
Sea la función
f x y
,
x
2
y
2Sus secciones son:
,
f x
0x
2;
f
,y
y
2
0
, también
f x
,0
x
24;f
0,y
y
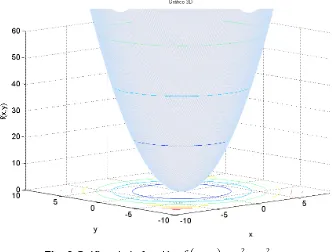
21Estas secciones corresponden a ecuaciones de parábolas. En efecto la función
f x y
,
es un paraboloide, como se observa en la siguiente Figura 9. Sus correspondientes curvas de nivel están proyectadas en el plano x-y.Fig. 9 Gráfica de la función
f x y
,
x
2
y
2.Y las parábolas
f x
,
x
2
0
y
f x
,
x
2
0 4
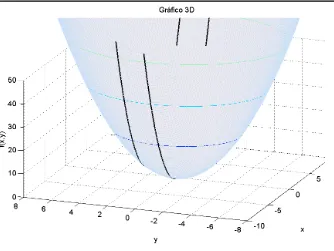
[image:19.612.171.503.338.590.2]IGNACIO ELIZALDE MARTÍNEZ ENERO – JUNIO 2012 41
Fig. 10 Secciones de la función
f x y
,
x
2
y
2.Las ecuaciones de algunas superficies importantes junto con sus secciones se muestran en la siguiente Tabla. También se han incluido las parametrizaciones más frecuentes de dichas curvas.
Superficie Ecuación Secciones Parametrización
Elipsoide
x
y
z
a
b
c
2 2 2
2 2 2
1
x
y
a
b
2 2
2 2
1
x
z
a
c
2 2
2 2
1
cos sen
x a
u
v
sen sen
y b
u
v
cosz c
v
u
0
2
v
0
Esfera
x
y
z
c
c
c
2 2 2
2 2 2
1
x
y
c
c
2 2
2 2
1
x
z
c
c
2 2
2 2
1
cos sen
x a
u
v
sen sen
y a
u
v
cosz a
v
u
0
2
v
0
Paraboloide
elíptico
z
x
y
c
a
b
2 2
2 2
z
x
c
a
2
2
z
y
c
b
2 2
cosx a v
u
seny b v
u
z c v
2u
0
2
IGNACIO ELIZALDE MARTÍNEZ ENERO – JUNIO 2012 42 Paraboloide
hiperbólico
z
x
y
c
a
b
2 2
2 2
z
x
c
a
2
2
z
y
c
b
2 2
x a u
y b v
z c u v
2 2< , <
u v
Cono
z
x
y
c
a
b
2 2 2
2 2 2
z
x
c
a
2 2
2 2
z
y
c
b
2 2 2 2
cosx a v
u
seny b v
u
z c v
u
0
2
v
Hiperboloide de una hoja
x
y
z
a
b
c
2 2 2
2 2 2
1
y
z
b
c
2 2
2 2
1
x
z
a
c
2 2
2 2
1
cos coshx a
u
v
sen coshy b
u
v
senhz c
v
u
0
2
v
Hiperboloide de dos hojas
x
y
z
a
b
c
2 2 2
2 2 2
1
y
z
b
c
2 2
2 2
1
x
z
a
c
2 2
2 2
1
cos senhx a
u
v
sen senhy b
u
v
coshz c
v
u
0
2
v
Cilindro
x
y
c
c
2 2
2 2
1
x
c
2 21
y
c
2 21
, cos
x u v
a
u
seny a
u
z v
En muchos casos es preferible utilizar las parametrizaciones de las ecuaciones para trazarlas de forma adecuada.
Dado el conjunto de ecuaciones paramétricas
e cos cos
u
v
x
u
2 6 2 1 2
e sen cos
u
v
y
u
2 6 2 1 2
e sen e sen
u u
y
1 3v
6v
Cuyo intervalo para los parámetros es:
u
0
6
,v
0
2
Construir su gráfica.
IGNACIO ELIZALDE MARTÍNEZ ENERO – JUNIO 2012 43
Fig. 11 Grafica del “Unicornio”.
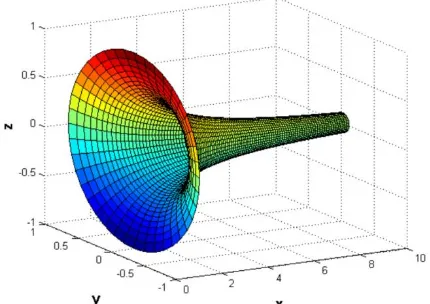
Grafique “La Trompeta de Gabriel” cuyas ecuaciones paramétricas son:
x u
cos
y
v
u
1
z
sen v
u
1
EL intervalo para los parámetros u y v son:
u
1
10
,
v
0
2
Fig. 12 Grafica del “la Trompeta de Gabriel”. Derivadas parciales
Una forma adicional de analizar una función de dos o más variables independientes además de sus secciones y curvas de nivel es a través de sus derivadas parciales.
[image:22.612.224.439.430.582.2]IGNACIO ELIZALDE MARTÍNEZ ENERO – JUNIO 2012 44 es decir,
g x
f x b
,
. Sig
tiene derivada en un puntoa
, entonces ésta recibe el nombre de derivada parcial def
con respecto de x en
a b
, y se denota porf a b
x
, , es decir:
, '
xf a b
g a
dondeg x
f x b
,
De forma similar la derivada parcial de
f
con respecto ay
en
a b
, , denotada porf a b
y
, se obtiene dejando aa
fija (x a
) y calculando la derivada ordinaria de la funciónh y
f a y
,
. Las notaciones utilizadas para designar las derivadas parciales son:Sea
z f x y
,
,
,
x x x
f x y
f
f x y
f
D f
x
x
,
,
y y y
f x y
f
f x y
f
D f
y
y
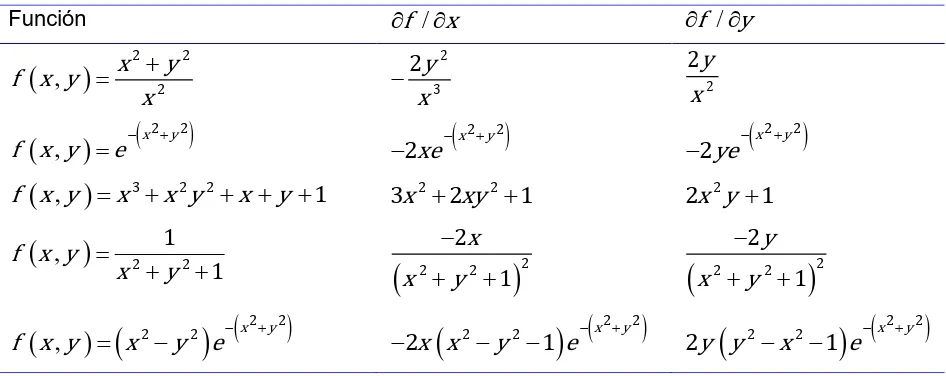
Para hallar la derivada parcial de una función de dos variables se usan las mismas reglas que para derivar funciones univariables ya que el resto de ellas se consideran fijas.
Interpretación geométrica de la derivada parcial de una función de dos variables
Una función de dos variables independientes representa una superficie y sus derivadas parciales
f
x
y
f
y
proporcionan las pendientes de las tangentes a las curvas que se generan entre losplanos x z y
y z
como se muestra en la Figura 13.
,
f x y
F x
F y
y
x