ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA UNIDAD PROFE“IONAL ADOLFO LÓPEZ MATEO“
“CORRECCIÓN DEL FACTOR DE POTENCIA EN SISTEMAS
RECTIFICADORES/INVERSORES CON PRUEBAS DE
LABORATORIO
”
T E S I S
QUE PARA OBTENER EL TÍTULO DE:
INGENIERO ELECTRICISTA
PRESENTA:
ALEJANDRO VILLEGAS ORTEGA
ASESORES:
M. EN C. JACOB EFRAÍN DÍAZ LAVARIEGA M. EN C. MANUEL GARCÍA LÓPEZ M. EN C. JOSÉ ANTONIO CASTILLO JIMÉNEZ
ESCUELA SUPE RIOR DE INGENIERÍA MECÁNICA Y ELECTRICA U NIDA D P ROFESIONAL "ADOLFO LÓPEZ MATEOS"
TEMA D E T E SIS
INGENIERO ELECTRICISTA
QUE PARA OBTENER EL TITIJLO DE
TESIS Y EXAMEN ORAL INDIVIDUAL
POR LA OPCIÓN DE TITULACIÓN
ALEJANDRO VILLEGAS ORTEGA
DEBERA(N) DESARROLLA R
"CORRECCIÓN DEL FACTOR DE POTENCIA EN SISTEMAS RECTIFICADORES/INVERSORES CON PRUEBAS DE LABORATORIO"
CORREGIR EL FACTOR DE POTENCIA Y ATENUAR LA CONTAMINACIÓN ARMÓNICA DE UN SISTEMA QUE CONTIENE UN RECTIFICADORlINVERSOR (CARGA NO LINEAL) PARA EL CONTROL DE VELOCIDAD DE UN MOTOR JAULA DE ARDILLA, EN EL LABORA TORIO.
セ@ INTRODUCCIÓN.
セ@ GENERALIDADES PARA LA CORRECCIÓN DEL FACTOR DE POTENCIA.
セ@ CORRECCIÓN DEL FACTOR DE POTENCIA EN FORMA CONVENCIONAL. セ@ GENERALIDADES DE LOS CONVERTIDORES DE POTENCIA
セ@ CORRECCIÓN DEL FACTOR DE POTENCIA EN UN SISTEMA NO LINEAL.
M.
セ@ CONCLUSIONES
MÉXICO D.F., A 21 DE MAYO DEL 2013
ASESORES
i
ÍNDICE
CAPÍTULO 1 INTRODUCCIÓN ... 1
1.1. Alcance ... 1
1.2. Descripción del problema ... 2
1.3. Justificación ... 2
1.4. Objetivo general ... 2
1.4.1. Objetivos particulares ... 2
1.5. Definiciones Generales ... 3
1.6. Estado del arte ... 4
1.7. Estructura de la tesis ... 5
CAPÍTULO 2 GENERALIDADES PARA LA CORRECCIÓN DEL FACTOR DE POTENCIA ... 7
2.1. Introducción ... 7
2.2. Tipos de cargas ... 7
2.3. Relación del factor de potencia y los tipos de cargas ... 9
2.3.1. Cargas resistivas ... 9
2.3.2. Cargas inductivas ... 10
2.3.3. Cargas capacitivas ... 10
2.4. Distorsión armónica ... 11
2.4.1. Características de la distorsión armónica ... 12
2.4.2. Representación de la distorsión armónica ... 12
2.4.3. Medidas de la distorsión de tensión y corriente ... 17
2.5. Potencias en un sistema eléctrico ... 20
2.5.1. Potencia activa (P) ... 20
2.5.2. Potencia reactiva (Q) ... 21
2.5.3. Potencia aparente (S) ... 21
2.5.4. El triángulo de potencias ... 22
ii
CAPÍTULO 3 CORRECCIÓN DEL FACTOR DE POTENCIA EN FORMA
CONVENCIONAL ... 26
3.1. Introducción ... 26
3.2. Corrección del factor de potencia ... 26
3.3. Impacto de una carga dinámica sobre el sistema ... 28
3.4. Pruebas de rendimiento al motor trifásico ... 29
3.5. Corrección del factor de potencia al motor trifásico bajo prueba ... 32
3.6. Estudio armónico preliminar en la compensación del factor de potencia de la carga dinámica ... 35
CAPÍTULO 4 GENERALIDADES DE LOS CONVERTIDORES DE POTENCIA ... 37
4.1. Introducción ... 37
4.2. Operación y características de rendimiento en rectificadores ... 39
4.2.1. Rectificador monofásico de puente completo ... 39
4.2.2. Rectificador trifásico de seis pulsos ... 42
4.3. Operación y características de rendimiento del inversor trifásico. ... 45
4.3.1. Control de disparo por ancho de pulsos (PWM) ... 48
CAPÍTULO 5 CORRECCIÓN DEL FACTOR DE POTENCIA EN UN SISTEMA NO LINEAL ... 51
5.1. Consideraciones preliminares ... 51
5.2. Corrección del factor de potencia del sistema en estudio ... 54
5.2.1. Descripción de la prueba ... 54
5.2.2. Motor sin control de velocidad ... 54
5.2.3. Motor con carga no lineal ... 55
5.3. Desarrollo de la prueba ... 57
5.4. Resultados de las pruebas ... 57
5.4.1. Sistema sin carga no lineal ... 58
5.4.2. Sistema con carga no lineal ... 67
5.5. Selección del banco de capacitores y diseño del filtro ... 78
5.6. Resultados de la prueba con la corrección del factor de potencia y la implementación del filtro ... 81
CAPÍTULO 6 CONCLUSIONES ... 87
iii
ÍNDICE DE FIGURAS
Capítulo 2Generalidades para la corrección del factor de potencia
Fig. 2.1 Curvas v-i de cargas lineales y no lineales ... 7
Fig. 2.2 Tensión y corriente en una carga resistiva ... 10
Fig. 2.3 Tensión y corriente en una carga inductiva ... 10
Fig. 2.4 Tensión y corriente en una carga capacitiva ... 11
Fig. 2.5 Forma de onda de la corriente de fase en un rectificador de seis pulsos ... 14
Fig. 2.6 Fundamental y 5ª armónica ... 15
Fig. 2.7 Fundamental, 5ª, 7ª y 11ª armónica ... 16
Fig. 2.8 Fundamental hasta la 17ª armónica ... 16
Fig. 2.9 Fundamental hasta la 23ª armónica ... 17
Fig. 2.10 Potencia activa y tensión en elemento resistivo ... 20
Fig. 2.11 Potencia reactiva capacitiva e inductiva ... 21
Fig. 2.12 Vector resultante de la suma entre P y Q ... 22
Fig. 2.13 Triángulo de potencias ... 22
Fig. 2.14 Pirámide de potencias ... 24
Capítulo 3 Corrección del factor de potencia en forma convencional Fig. 3.1 Triángulo de potencia de corrección del factor de potencia... 27
Fig. 3.2 Sumatoria fasorial de corrientes ... 27
Fig. 3.3 Diagrama eléctrico de conexión ... 29
Fig. 3.4 Conexión física del circuito bajo prueba ... 30
iv
Fig. 3.6 Módulo de carga capacitiva 3x105 vars ... 32
Fig. 3.7 Diagrama de conexión para la corrección del factor de potencia ... 33
Fig. 3.8 Efectos en la corriente de la corrección del factor de potencia ... 34
Fig. 3.9 Distorsión armónica de corriente y tensión ... 35
Capítulo 4 Generalidades de los convertidores de potencia Fig. 4.1 Diagrama de convertidores para la alimentación de un motor de CA ... 37
Fig. 4.2 Diagrama a bloques del suministro de energía con carga no lineal ... 38
Fig. 4.3 Rectificador monofásico de puente de diodos ... 40
Fig. 4.4 Rectificador trifásico de puente completo ... 43
Fig. 4.5 Inversor monofásico ... 45
Fig. 4.6 Corriente para una carga altamente inductiva ... 46
Fig. 4.7 Inversor trifásico ... 46
Fig. 4.8 Señales de control y comparación para modulación por ancho de pulso ... 48
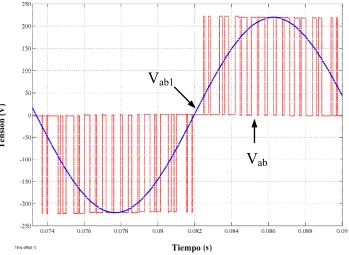
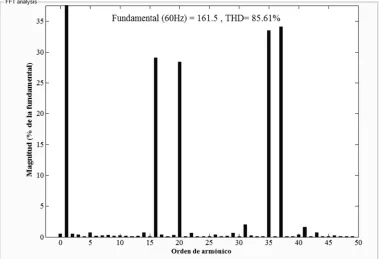
Fig. 4.9 Tensión de línea y su componente fundamental en la salida del inversor ... 49
Fig. 4.10 Espectro de armónicas de la tensión de línea ... 50
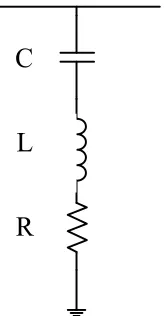
Capítulo 5 Corrección del factor de potencia en un sistema no lineal Fig. 5.1 Filtro sintonizado simple ... 51
Fig. 5.2 Diagrama eléctrico del sistema sin carga no lineal ... 54
Fig. 5.3 Diagrama eléctrico del sistema con variador de velocidad ... 55
Fig. 5.4 Esquema de conexión del sistema bajo prueba ... 55
Fig. 5. 5 Conexión física del diagrama de la Fig. 5.4 ... 56
v
Fig. 5.7 Tensión en el motor al vacío sin carga no lineal ... 59
Fig. 5.8 Tensión y corriente motor al vacío sin carga no lineal ... 60
Fig. 5.9 Corriente en el motor carga nominal sin carga no lineal ... 61
Fig. 5.10 Tensión en el motor carga nominal sin carga no lineal ... 62
Fig. 5.11 Tensión y corriente en motor carga nominal ... 63
Fig. 5.12 Tensión en el motor con corrección del factor de potencia ... 64
Fig. 5.13 Corriente en el motor con corrección del factor de potencia ... 65
Fig. 5.14 Tensión y corriente en el motor compensado... 66
Fig. 5.15 Tensión en el motor al vacío alimentado por inversor ... 67
Fig. 5.16 Corriente de línea en el motor al vacío alimentado por inversor ... 68
Fig. 5.17 Tensión y corriente del motor al vacío con carga no lineal ... 69
Fig. 5.18 Tensión del motor con carga nominal con carga no lineal ... 70
Fig. 5.19 Corriente en el motor con carga nominal con carga no lineal ... 71
Fig. 5.20 Tensión y corriente en el motor carga nominal con carga no lineal ... 72
Fig. 5.21 Tensión y corriente en el sistema con carga no lineal ... 73
Fig. 5.22 Espectro de armónicos con carga no lineal ... 74
Fig. 5.23 Formas de onda de tensión y corriente con motor al vacío con carga no lineal .... 75
Fig. 5.24 Espectro de armónicas para el motor en vacío ... 76
Fig. 5.25 Forma de onda de tensión y corriente motor carga nominal con carga no lineal .. 77
Fig. 5.26 Espectro de armónicas motor con carga nominal y carga no lineal ... 78
Fig. 5.27 Diagrama eléctrico del sistema bajo prueba con carga no lineal y filtrado ... 79
vi Fig. 5.29 Formas de onda de tensión y corriente motor al vacío con carga no lineal ... 83
Fig. 5.30 Tensión y corriente en la fuente con carga nominal y carga no lineal ... 84
Fig. 5.31 Comparación del factor de potencia en diferentes condiciones del sistema ... 86
Apéndice A
Fig. A.1 Espectro de armónicos relevantes de tensión antes de realizar la corrección del FP ... 91
Fig. A.2 Espectro de armónicos relevantes de corriente antes de realizar la corrección del FP ... 92
Fig. A.3 Espectro de armónicos relevantes de tensión con la corrección del factor de potencia ... 92
vii
ÍNDICE DE TABLAS
Capítulo 3 Corrección del factor de potencia en forma convencional
Tabla 3.1 Mediciones directas de las variables observadas ... 30
Tabla 3.2 Mediciones indirectas de las variables observadas ... 31
Tabla 3.3 Valores de medición directa para la corrección del factor de potencia ... 34
Capítulo 5 Corrección del factor de potencia en un sistema no lineal Tabla 5.1 THDi en el motor al vacío sin carga no lineal ... 58
Tabla 5.2 THDi en el motor al vacío sin carga no lineal ... 59
Tabla 5.3 Potencias en el motor al vacío sin carga no lineal ... 60
Tabla 5.4 THDi en el motor al vacío sin carga no lineal ... 61
Tabla 5.5 THDv en el motor al vacío sin carga no lineal ... 62
Tabla 5.6 Potencias en el motor con carga nominal ... 63
Tabla 5.7 THDv en el motor compensado sin carga no lineal ... 64
Tabla 5.8 THDi en el motor compensado sin carga no lineal ... 65
Tabla 5.9 Potencias en el motor con carga nominal ... 66
Tabla 5.10 THDv en el motor al vacío con carga no lineal ... 67
Tabla 5.11 THDi en el motor al vacío con carga no lineal ... 69
Tabla 5.12 Potencias en el motor al vacío con carga no lineal ... 69
Tabla 5.13THDv en el motor con carga nominal con carga no lineal ... 70
Tabla 5.14 THDi en el motor con carga nominal con carga no lineal ... 71
Tabla 5.15 Potencias en el motor con carga nominal con carga no lineal ... 72
viii
Tabla 5.17 Potencias con el motor al vacío con carga no lineal ... 76
Tabla 5.18 Potencias con el motor a carga nominal con carga no lineal ... 77
Tabla 5.19 Valores de los elementos del filtro ... 81
Tabla 5.20 Tabla comparativa de armónicos sin motor... 82
Tabla 5.21 Tabla comparativa de armónicos con motor al vacío ... 83
Tabla 5.22 Tabla comparativa de armónicos motor carga nominal carga no lineal ... 84
1 En los diferentes sistemas eléctricos de potencia se afrontan problemas sobre eficiencia y
estabilidad de la red debido al uso creciente de equipos informáticos y de la Electrónica de
Potencia; lo cual ha dado origen a cargas que presentan un comportamiento no-lineal en su
condición normal de operación. Uno de los factores que afectan la red eléctrica es el factor
de potencia de la carga. Mediante los procesos rectificadores de los que hace uso la
Electrónica de Potencia el factor de potencia se modifica debido a la distorsión de onda de la
corriente que se produce, derivando en una exigencia de más corriente de la fuente, además
de introducir armónicos y las consecuencias que estos tienen a todos los equipos y elementos
en los sistemas eléctricos de potencia.
La mejora del factor de potencia ayuda a disminuir las capacidades térmicas de los
transformadores y conductores, reduce las pérdidas de la línea y las caídas de tensión.
Consecuentemente, las compañías suministradoras incentivan este esfuerzo debido a que al
mejorar el factor de potencia no sólo se reduce la demanda de energía eléctrica, sino que
también ayuda a postergar inversiones de crecimiento de capacidad en subestaciones y
centrales de generación. Este trabajo propone analizar el impacto que tienen hacia la red los
arreglos de rectificación y arreglos de inversores así como analizar el funcionamiento de los
circuitos y/o módulos orientados a corregir el factor de potencia.
1.1.Alcance
El presente estudio analiza un problema en las redes de eléctricas de utilización, que es el
aprovechamiento de la energía eléctrica y que afecta directamente el dimensionamiento y el
funcionamiento de los equipos de un sistema eléctrico. Este análisis se lleva a cabo en un
sistema que contiene un variador de velocidad para un motor trifásico constituido por un
sistema rectificador/inversor; el comportamiento de este sistema representa, en buena
medida, la contaminación introducida frecuentemente a la red por dispositivos que hacen uso
de la electrónica de potencia. En este trabajo se presenta un estudio que describe, analiza, y
corrige la distorsión que una carga no lineal agrega a la frecuencia fundamental del sistema
2
1.2.Descripción del problema
El problema fundamental del factor de potencia radica en el hecho de que las compañías
suministradoras proveen a los usuarios con volt-amperes (potencia aparente), pero les cobran
por los watts (potencia real) consumidos. El factor de potencia por debajo de 1.0 requiere que
la compañía suministradora genere más energía que el mínimo de volt-amperes necesarios
para proveer la potencia real. Esto incrementa la generación y los costos de transmisión. Por
otro lado, los componentes del sistema como generadores, conductores, transformadores y
equipo de maniobra se incrementarían en tamaño (costo) para llevar la corriente adicional.
Además, el comportamiento de cargas no lineales en condiciones nominales añade armónicos
que deterioran aún más el factor de potencia, debido a la distorsión en las formas de onda de
tensión y de corriente [1].
1.3.Justificación
De acuerdo con el problema mencionado en la sección anterior, los ingenieros electricistas
deben estudiar los fenómenos que afectan la calidad de la energía que deterioran, como
consecuencia, la eficiencia de los sistemas eléctricos de utilización. Así, es de vital
importancia que se estudien y evolucionen las medidas preventivas necesarias, se conozcan
los criterios que caractericen y mejoren de la señal distorsionada, para evaluar debidamente
la contaminación armónica presente y proponer soluciones para limitar las perturbaciones
armónicas
1.4.Objetivo general
Corregir el factor de potencia y atenuar la contaminación armónica de un sistema que contiene un rectificador/inversor (carga no lineal) para el control de velocidad de un
motor jaula de ardilla, en el laboratorio.
1.4.1. Objetivos particulares
Análisis del sistema para determinar el factor de potencia generado por la carga del
3
Determinación de la capacidad de un banco de capacitores para compensar el sistema sin rectificador-inversor.
Realizar pruebas en laboratorio para determinar la presencia y magnitud de
contaminación armónica en el sistema estudiado.
Análisis de filtros pasivo para la atenuación de contaminación armónica.
Implementar el filtro para la atenuación de la contaminación armónica en el sistema funcionando con el rectificador-inversor.
Analizar los resultados obtenidos de las pruebas realizadas.
1.5.Definiciones Generales
Electrónica de Potencia. Se define como las aplicaciones de la electrónica de estado sólido
para el control y la conversión de la energía eléctrica.
Carga no lineal. Se define como una carga que en estado permanente manifiesta señales de
tensión o corriente no sinusoidales. Y que a su vez la relación de tensión-corriente no es
representada por una recta.
Frecuencia Fundamental. Es la frecuencia normalizada para el suministro en general. En los
sistemas de diseño americano la frecuencia de oscilación es de 60 Hz.
Componente Fundamental. Es la onda de tensión o de corriente sinusoidal componente de la
onda distorsionada cuya frecuencia es igual a la fundamental.
Componente Armónica. Se define como la onda de tensión o de corriente sinusoidal con
frecuencia múltiplo entero de la frecuencia fundamental. Se trata de un fenómeno de
distorsión de la forma de onda de tensión y de corriente en estado estable.
Elementos lineales y no lineales. En el dominio de la frecuencia, el comportamiento de los
elementos lineales se describe mediante relaciones algebraicas lineales. Esto significa que
una enésima armónica de tensión el elemento lineal responde con una armónica de corriente
4 varía linealmente con la frecuencia. En cambio, los elementos no lineales se describen
mediante ecuaciones no lineales que ligan las tensiones y corrientes armónicas consideradas.
Diodo de potencia. Es un dispositivo de unión pn con dos terminales, que permite el paso de
corriente sólo en un sentido (ánodo a cátodo).
Rectificador de diodo. Un circuito rectificador de diodo convierte la tensión de corriente
alterna (ca) en una tensión fija de corriente directa.
Potencia Activa. Se denota por la letra P, representa la capacidad de un circuito para realizar
un proceso de transformación de la energía eléctrica en trabajo. Cuando se habla de demanda
o consumo eléctrico, es esta potencia la que se utiliza para determinar dicho consumo.
Potencia Reactiva. Esta potencia no tiene carácter de ser realmente consumida, debido a que
su valor medio es nulo, por lo que no produce trabajo útil. Sin embargo su existencia
determina la existencia de bobinas o capacitores en los circuitos. Se denota con la letra Q
Potencia Aparente. Es la suma fasorial de la potencia activa y reactiva en un circuito eléctrico
de corriente alterna. Esta potencia no es la realmente consumida o útil, salvo cuando el factor
de potencia es la unidad. Se le designa con la letra S.
Factor de Potencia. Es la relación que existe entre la potencia real y la potencia aparente,
representa un dato cualitativo acerca de la potencia entregada en el circuito con la que
realmente se consume.
1.6.Estado del arte
La historia de la Electrónica de Potencia se inicia en 1900 con la introducción del rectificador
de arco de mercurio. Después se introdujeron en forma gradual el rectificador de tanque
metálico, el de tubo al vacío controlado por la rejilla, el ignitrón, fanotrón y tiratrón. Estos
dispositivos se utilizaban para el control de los sistemas de potencia hasta la década de 1950
[2].
La primera revolución electrónica, en 1956, fue establecida con la invención del transistor de
5 disparo o tiristor (SCR). La segunda revolución se dio en 1958, con la introducción del tiristor
comercial por General Electric. Antes de la aparición de los semiconductores de potencia, las
fuentes principales de distorsión en la forma de onda fueron los hornos de arco eléctrico, el
efecto acumulado de las lámparas fluorescentes, y con menor presencia las máquinas
eléctricas y transformadores [2]. Con el creciente uso de dispositivos cuyo funcionamiento
se basa en la aplicación de semiconductores de potencia, el problema de contaminación
armónica es un problema de creciente importancia que necesita soluciones con una alta
relación costo beneficio [3].
En 1992 se presentó un artículo titulado “Un acercamiento unificado al diseño de los circuitos
para corregir el factor de potencia resonantes” el cual establece que para evitar una corriente
discontinua a la entrada del rectificador ocasionada por la alta capacitancia de filtro, se utilice
un reactor entre la salida del rectificador y la entrada del convertidor; a su vez establece
algoritmos y simulaciones para sintonizar en tiempo real el inductor para la corrección del
factor de potencia [4].
En 2001 Gunther, E. W. [5] señala las características fundamentales en sistemas eléctricos
de potencia donde interactúan componentes armónicas de diferentes fuentes llamadas
inter-armónicas; en 2009 Gómez Morales [6] realiza un análisis enfocado a un problema práctico
de corrección de factor de potencia de forma tradicional y con cargas no lineales, este estudio
propone una relación de costos y la forma de implementar el banco de capacitores y el filtro
para compensar la potencia reactiva.
1.7.Estructura de la tesis
En el capítulo 1 se presenta el alcance, descripción del problema, justificación, objetivo
general y particulares de la tesis, definiciones generales así como antecedentes en cuanto a
investigaciones relevantes que ayudan al desarrollo de este estudio.
El capítulo 2 establece las consideraciones teóricas necesarias para llevar a cabo la corrección
del factor de potencia en forma convencional. Se explica desde los tipos de cargas y como se
6 sus causas y formas de analizar las ondas contaminadas mediante la descomposición
mediante la serie de Fourier.
El capítulo 3 representa la descripción de la prueba llevada a cabo en laboratorio para la
corrección del factor de potencia en un sistema convencional, representado por un motor
trifásico tipo jaula de ardilla. Mediante mediciones y cálculos se determinaron las
condiciones previas a la corrección del factor de potencia en la carga, para determinar los
reactivos necesarios para la compensación a un factor de potencia cercano a la unidad.
También se muestra un análisis preliminar de armónicos en la carga al introducir el banco de
capacitores.
En el capítulo 4 se mencionan los convertidores que se utilizarán en la prueba de corrección
de factor de potencia en un sistema no lineal, entre ellos están el rectificador monofásico y
el inversor trifásico que alimenta la carga. Se muestran sus parámetros de rendimiento que
después serán determinados mediante las pruebas en laboratorio.
El capítulo 5 se muestra el procedimiento y los resultados realizados para compensar el factor
de potencia en un sistema no lineal. Lo anterior se realiza mediante la incorporación de un
banco de capacitores como se realizó en la prueba del capítulo 3, pero ahora se añade un filtro
pasivo para evitar la resonancia entre el elemento capacitivo y la inductancia de la fuente y
la carga. También se calculan los filtros necesarios para la eliminación de los armónicos más
7
2.1.Introducción
En este capítulo se analizan los métodos para la corrección del factor de potencia. La
aplicación de un método u otro dependerá del tipo de cargas que tenga el sistema; en forma
general existen filtros activos y filtros pasivos para lograr la corrección; sin embargo, el uso
de los mismos dependerá de factores diversos como un análisis del comportamiento de las
señales armónicas en el sistema (en caso de existir) o una posible resonancia de los
capacitores con el sistema, hasta factores como los económicos que dependerán también en
la decisión final sobre qué método de corrección se elegirá.
2.2.Tipos de cargas
Una carga es un elemento que consume energía eléctrica, existen dos tipos de cargas de forma
general: Cargas lineales y Cargas no lineales. Una carga lineal es aquella en donde la tensión
[image:17.612.165.447.419.643.2]y la corriente que pasan por ella se comportan proporcionalmente.
8 Por otra parte, en una carga no lineal, como un diodo, su característica v-i no es constante,
ambos ejemplos se pueden observar en la Fig. 2.1 a) y 2.1 b).
Otro aspecto de las cargas no lineales es que al exigir una tensión senoidal consumen
corrientes no senoidales contrario al comportamiento de una carga lineal que requiere de
igual forma una corriente senoidal.
Las cargas o dispositivos no lineales se enumeran a continuación [7]:
Tipos tradicionales (clásicos):
o Transformadores.
o Máquinas rotatorias.
o Hornos de arco.
Tipos modernos (electrónica de potencia):
o Luminarias fluorescentes.
o Controles electrónicos y fuentes de alimentación de modo conmutado
ampliamente utilizadas actualmente en la industria y en el equipo electrónico de oficinas.
o Dispositivos controlados por tiristores que incluyen:
Rectificadores.
Inversores.
Compensadores estáticos de potencia reactiva.
Variador de frecuencia.
Transmisión en HVDC.
La familia de tiristores incluye:
Tiristores de bloqueo inverso o rectificadores controlados.
Tiristores bidireccionales conocidos como triacs.
9
Tiristores de conducción inversa.
Tiristores de bloqueo inverso.
SCR’s activados por luz.
SCR’s asimétricos.
Tiristores estáticos inductivos.
Tiristores de encendido y apagado por compuerta.
Los rectificadores AC/DC son utilizados en:
Variadores de velocidad en motores DC.
Fuentes de alimentación reguladas.
Cargadores de baterías.
Transmisión HVDC.
2.3.Relación del factor de potencia y los tipos de cargas
De forma general se pueden diferenciar tres tipos de cargas eléctricas en la red eléctricas por
las cuales circulan una corriente expresada en amperes (A) y una tensión que se expresa en
volts (V).
2.3.1. Cargas resistivas
Son aquellas cargas eléctricas que representan una resistencia eléctrica que es denominada
con la letra R y se expresa en ohms (Ω). Este tipo de carga puede ser encontrada en
dispositivos eléctricos que transforman la energía de totalmente en calor y luz, al no generar
campos magnéticos ni eléctricos en su operación sólo consumen energía activa denotada por
la letra P y expresada en watts (W). Dada su constitución puramente resistiva muestran una
relación tensión-corriente lineal y se encuentran en fase, a su vez que su factor de potencia
es unitario, debido a que la potencia aparente es la misma que la potencia activa, por lo tanto
10 Como se observa en la Fig. 2.2 la tensión y corriente se encuentran en fase.
Fig. 2.2 Tensión y corriente en una carga resistiva
2.3.2. Cargas inductivas
Estas cargas se pueden encontrar en cualquier dispositivo o equipo que contenga bobinas, se
produce un atraso de la corriente respecto a la tensión debido a una fuerza contra
electromotriz originada por la inductancia y que tiene una dirección contraria a la corriente
de la fuente. Debido a este desfasamiento entre tensión y corriente el factor de potencia en
este tipo de cargas es menor a la unidad. Como se muestra en la Fig. 2.3 en un circuito
puramente inductivo la corriente se encuentra atrasada 90° con respecto a la tensión (algunos
equipos que representan cargas inductivas son motores, balastros, o transformadores; estos
equipos además de consumir energía activa consumen energía reactiva denotada con la letra
Q y sus unidades son los volts-amperes reactivos [var])
Fig. 2.3 Tensión y corriente en una carga inductiva
2.3.3. Cargas capacitivas
Las cargas capacitivas son representadas por capacitores que se componen de dos placas
conductoras separadas por un dieléctrico, lo cual, al aplicar una tensión V ocasiona que se
11 descarga al energía almacenada al circuito, lo cual es de gran utilidad en varias aplicaciones
una de ellas es como filtro para la tensión a la salida de rectificadores como se verá más
adelante. Como se puede apreciar en la Fig. 2.4 la corriente se encuentra adelantada 90° con
respecto a la tensión. En un circuito puramente capacitivo no existe consumo de energía a
pesar de que exista corriente circulando, esto significa que es un elemento puramente
reactivo. En este tipo de cargas existe un dieléctrico que separa a los conductores ocasionando
que el ángulo del factor de potencia se incremente.
Fig. 2.4 Tensión y corriente en una carga capacitiva
2.4.Distorsión armónica
Cuando la tensión o la corriente de un sistema eléctrico tienen deformaciones con respecto a
la forma de onda senoidal, se dice que la señal esta distorsionada.
Esta distorsión puede ser ocasionada por:
Fenómenos transitorios tales como arranque de motores, conmutación de capacitores,
descargas atmosféricas o fallas por cortocircuito entre otras.
Condiciones permanentes que están relacionadas con armónicas de estado estable. En
los sistemas eléctricos es común encontrara señales de tensión o de corriente con
cierta distorsión armónica que cuando es baja, no afecta la operación de equipos y
dispositivos. Existen normas que regulan los máximos de distorsión armónica
12
2.4.1. Características de la distorsión armónica
Cuando la señal de tensión o corriente medida en cualquier punto de un sistema eléctrico se
encuentra distorsionada, con relación a la onda senoidal que de forma ideal debería ser vista,
se considera que se trata de una señal contaminada con componentes armónicas.
Para que las deformaciones en una señal sean consideradas como distorsión armónica se
deben cumplir las siguientes condiciones:
Que la señal tenga valores definidos dentro del intervalo, lo que implica que la energía contenida es finita.
Que la señal sea periódica, teniendo la misma forma de onda en cada ciclo de la señal
de tensión o corriente.
Permanente, que la distorsión se presente en cualquier instante de tiempo, es decir,
que la distorsión no sea pasajera.
2.4.2. Representación de la distorsión armónica
La serie de Fourier representa una forma efectiva para analizar la distorsión armónica, se
basa en la descomposición de una onda distorsionada en sus componentes con frecuencia de
múltiplo entero de la fundamental.
En forma general y de acuerdo con [3] este concepto proviene del teorema de Fourier y define
que, bajo ciertas condiciones analíticas, una función periódica cualquiera puede considerarse
integrada por una suma de funciones senoidales, incluyendo un término constante en caso de
asimetría respecto al eje de las abscisas, siendo la primera armónica, denominada también
señal fundamental, del mismo periodo y frecuencia que la función original, y el resto serán
funciones senoidales cuyas frecuencias son múltiplos de la fundamental. Estas componentes
13 La definición de la serie de Fourier se muestra en las ecuaciones 2.1 y 2.2.
cos sen (2.1)
sin (2.2)
donde:
Es una función periódica de frecuencia , frecuencia angular
y periodo ⁄ ⁄
sin Representa a la componente fundamental.
sin Representa la n-ésima armónica de amplitud , frecuencia y
fase
El cálculo de los coeficientes se realiza con las expresiones de la ecuación 2.3 a 2.5 [7]:
, (2.3)
cos cos (2.4)
sen sen (2.5)
Para simplificar el cálculo de los coeficientes de la serie de Fourier existen reglas de simetría
las cuales establecen que las ondas simétricas pares caracterizadas por dan
como resultado que la serie de Fourier no contenga los términos senoidales, por otra parte,
para ondas con simetría impar caracterizadas por los términos cosenoidales
no forman parte de la serie de Fourier [7]. Para el caso de simetría de media onda en donde
se cumple que ⁄ se tiene un componente dc igual a cero y la cancelación
de las armónicas pares (2, 4, 6,…). La característica anterior produce que para los sistemas
eléctricos de potencia, como el caso analizado en este estudio, los armónicos pares no se
consideran ya que siempre se manejan señales de tensión y de corriente que cumplen con la
14 Mediante Matlab se muestra y calculan los coeficientes de la serie de Fourier para una onda
cuadrada con magnitud unitaria mostrada en la Fig. 2.5 de amplitud unitaria, este tipo de
onda es característica de la corriente de fase en los convertidores de seis pulsos con
transformador estrella-estrella [7]. Aplicando las reglas de simetría se puede notar que se
trata de una señal impar por lo tanto no se tiene coeficiente . Tampoco se tiene componente
dc ni armónicas pares debido a la simetría de media onda.
Fig. 2.5 Forma de onda de la corriente de fase en un rectificador de seis pulsos
Calculando el coeficiente :
sin
/
/ sin
/
/
(2.6)
cos cos cos cos
√ , , , … , , , , …
15
sin
√ sin sin sin
sin sin ∓ . . .
(2.7)
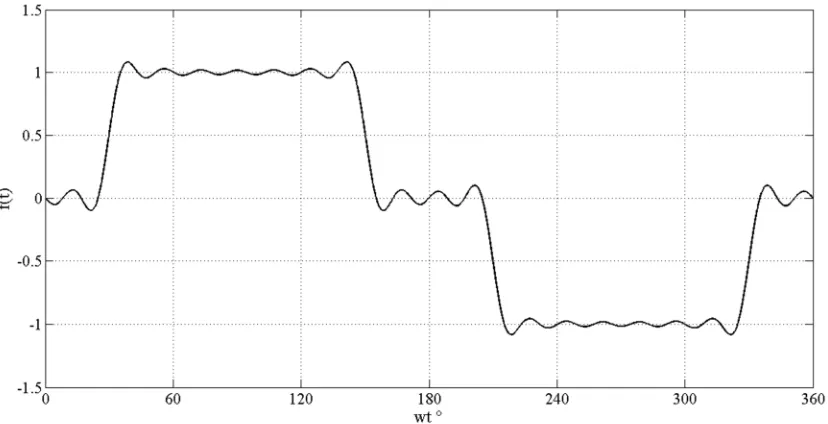
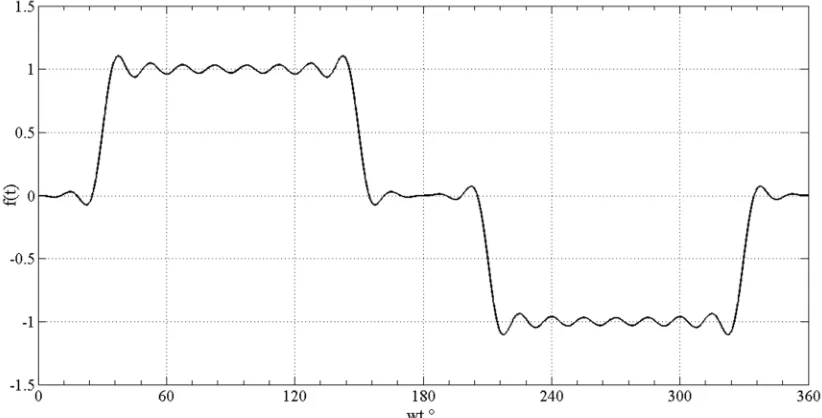
De la Fig. 2.6 a la Fig. 2.9 se construye la función mediante sus componentes armónicas
desde la fundamental hasta la 19ª armónica [9].
16
Fig. 2.7 Fundamental, 5ª, 7ª y 11ª armónica
[image:26.612.100.514.413.625.2]17
Fig. 2.9 Fundamental hasta la 23ª armónica
En las Figuras 2.6 a 2.9 se suman las componentes armónicas obtenidas hasta la 23ª
componente, es importante notar cómo entre más componentes armónicas son añadidas, la
función se ajusta mejor a la función original de la Fig. 2.5.
2.4.3. Medidas de la distorsión de tensión y corriente
Para cuantificar la distorsión existente en una señal, de acuerdo con [2], es preciso definir
parámetros que determinen su magnitud y contar con equipos de medición adecuados. En
esta sección se presentan las expresiones necesarias para efectuar los cálculos relacionados
con la distorsión armónica.
2.4.3.1.Medidas de la distorsión de tensión y corriente
Los valores eficaces o rms (raíz cuadrática media por root mean square) se pueden expresar
cuando las mediciones de tensión o corriente que se realicen al circuito o elementos del
mismo se repiten con un periodo T en estado permanente.
Es representado, de acuerdo a la ecuación 2.8 para tensión como corriente:
18 Cuando se suman señales de tensión o corriente de diferentes frecuencias para obtener su
resultante se utilizan las expresiones mostradas a continuación.
La corriente y tensión eficaz se calculan utilizando las ecuaciones 2.9 y 2.10.
(2.9)
(2.10)
2.4.3.2.Cofactor de distorsión
Es la relación entre el contenido armónico de la señal y su valor eficaz (rms). Su valor se
ubica entre 0% y 100%. Es el índice más ampliamente usado en Europa [10].
Con una distorsión baja, el Cd cambia notoriamente, por eso se recomienda su uso cuando se desea conocer el contenido armónico de una señal como se muestra en la ecuación 2.11.
% (2.11)
2.4.3.3.Distorsión armónica total (THD)
Es la relación entre el contenido armónico de la señal y la primera armónica o fundamental.
Su valor se ubica entre 0% e infinito [3].
Es el parámetro de medición de distorsión más conocido, por lo que es recomendable para
medir la distorsión en parámetros individuales (corriente y tensión). Al igual que el cofactor
de distorsión, es útil cuando se trabaja con equipos que deben responder sólo a la señal
19 La ecuación 2.12 muestra cómo determinar esta relación
% (2.12)
El THD también es conocido como factor armónico (HF de harmonic factor) y en el caso de
la corriente se define como lo muestra la ecuación 2.13:
(2.13)
2.4.3.4.Distorsión de demanda total
Es la relación entre la corriente armónica y la demanda máxima de la corriente de carga.
Cuando se efectúan mediciones relacionadas con armónicas en los sistemas eléctricos, es
común encontrar niveles de THD altos en condiciones de baja carga que no afectan la
operación de los equipos ya que la energía distorsionante que fluye también es baja. Para
evaluar estas condiciones se define el TDD que es el parámetro de referencia que establece
los límites aceptables de distorsión en corriente en la norma IEEE 519 [10]. Se calcula como
lo muestra la ecuación 2.14.
% (2.14)
donde:
Ih = Magnitud de la armónica h individual
h = Orden de armónico
20
2.5.Potencias en un sistema eléctrico
2.5.1. Potencia activa (P)
De acuerdo con [11] la potencia activa es la potencia que representa la capacidad de un
circuito para realizar un proceso de transformación de la energía eléctrica en trabajo, se debe
a la componente de la corriente que se encuentra en fase con la tensión. Los diferentes
equipos eléctricos convierten la energía eléctrica en otro tipo de energía, tales como
mecánica, lumínica, térmica, química, etc. Por lo tanto, esta potencia es la que realmente se
consume por el equipo. Cuando se menciona la demanda eléctrica, precisamente se está
hablando de esta energía.
Se designa con la letra P, y se calcula como el producto de la tensión por la corriente y el
factor de potencia o cos ; este producto se define por el triángulo de potencias, y debido a
que esta potencia sólo considera los elementos resistivos el cos , la impedancia se
puede representar sólo por R, por lo tanto se calcula como lo muestra la ecuación 2.15.
cos ∙ ∙ cos ∙ ∙ cos ∙ (2.15)
Donde:
Z = Impedancia (Ω)
V = Tensión (V)
I = Corriente (A)
R = Resistencia (Ω)
Las unidades de la potencia activa son los watts designados por la letra W. Debido a que esta
potencia se origina debido a elementos resistivos, se representa por un vector a cero grados
como se puede observar en la Fig. 2.10.
21
2.5.2. Potencia reactiva (Q)
Esta potencia tiene carácter de no ser consumida a diferencia de la real o activa, y sólo
aparecerá en el sistema cuando existan bobinas o capacitores en los circuitos que generan
campos magnéticos y campos eléctricos. Se origina la componente de corriente en adelanto
o retraso de 90° con respecto a la tensión. Debido a que la potencia reactiva (Q) tiene un
valor medio nulo, no produce trabajo útil.
La potencia reactiva se define por la ecuación 2.16.
sin ∙ ∙ sin ∙ ∙ sin ∙ sin (2.16)
donde:
S = Potencia aparente o total (kVA o MVA)
Sus unidades están dadas en var, kvar o Mvar. Lo que ratifica que esta potencia es debida
[image:31.612.263.357.421.499.2]solamente a los elementos reactivos, que a su vez pueden ser del tipo inductivo QL y de tipo capacitivo QC. Tales características se observan en la Fig. 2.11.
Fig. 2.11 Potencia reactiva capacitiva e inductiva
2.5.3. Potencia aparente (S)
La potencia aparente también llamada potencia total o potencia compleja, se representa en
un circuito eléctrico como el resultado se sumar fasorialmente la potencia activa y la potencia
reactiva. Dicho diagrama se muestra en la Fig. 2.12.
Esta potencia no es realmente la consumida o útil, salvo cuando el factor de potencia (cos φ) es igual a la unidad, de otra forma esta potencia indica que la red de alimentación no sólo ha
22 los elementos reactivos como bobinas y condensadores. Es designada con la letra S. La
expresión para calcular la potencia aparente se muestra en la ecuación 2.17:
∙ (2.17)
Las unidades de S están dadas generalmente en VA, kVA o MVA y se puede notar en la Fig.
2.12 que el vector S da información tanto de la potencia activa como reactiva así como su
ángulo de desfasamiento, estos datos son muy importantes debido a que dan rasgos
característicos del flujo de potencia en el sistema a analizar.
Fig. 2.12 Vector resultante de la suma entre P y Q
2.5.4. El triángulo de potencias
El triángulo de potencias es ampliamente utilizado debido a que mediante la simple
representación de un triángulo rectángulo es posible observar a las tres potencias descritas
anteriormente. Cómo se observa en la Fig. 2.13, la suma de la potencia reactiva y activa dan
origen a un vector S que a su vez es la hipotenusa del triángulo rectángulo. Por otra parte el
triángulo de potencias establece la relación directa que existe entre las potencias en un
sistema debido a que al modificar una de estas magnitudes las otras dos potencias cambiarán
de magnitud.
Fig. 2.13 Triángulo de potencias
23 representa la relación existente entre la potencia real de trabajo y potencia total o aparente
consumida por la carga. La relación anterior se representa según la ecuación 2.18.
cos (2.18)
En la ecuación 2.19 se define a la potencia compleja como:
(2.19)
donde:
= Potencia reactiva inductiva (var)
El resultado de la ecuación 2.19 será un número fraccionario o 1 dependiendo del factor de
potencia del equipo o del sistema en forma general. Si el número resultante es menor que la
unidad representa un desfase de ciertos grados de la corriente respecto a la tensión.
El resultado ideal del factor de potencia es la unidad debido a que indicaría que la utilización
de la energía suministrada está siendo aprovechada en el circuito alimentado. En aquellos
circuitos puramente resistivos se tendrá un factor de potencia unitario debido a la ausencia
de elementos que demanden potencia reactiva, dando como resultado que la potencia real
este en fase con la tensión.
2.5.5. Potencia armónica
La expresiones de potencia anteriores son válidas mientras el sistema sea lineal, es decir que
no exista distorsión armónica fuera de los rangos establecidos por norma.
Las cargas no lineales son las que generan la distorsión armónica en la corriente, que al fluir
por el cableado y el transformador de distribución, producen la distorsión en la tensión.
Budeanu, en sus definiciones de potencia presentadas en [10] establece que para aquellos
sistemas en donde existe una distorsión en la tensión mínima y existe distorsión armónica en
corriente se utiliza la pirámide de potencias para considerar tanto los valores fundamentales
24 Para poder aplicar correctamente la pirámide de potencias, Fig. 2.14, se analizarán los
conceptos relacionados. De la misma forma en [10] se establece que las siguientes
expresiones así como la pirámide de potencias se aplican cuando se tiene una tensión senoidal
[image:34.612.246.377.173.325.2]y la corriente esta distorsionada:
Fig. 2.14 Pirámide de potencias
Potencia aparente
⋯ (2.20)
Potencia eficaz
cos (2.21)
Potencia reactiva
(2.22)
Potencia reactiva fundamental
sin (2.23)
Potencia distorsionante
25 Factor de potencia fundamental
cos (2.25)
Factor de potencia
26
3.1.Introducción
El factor de potencia ha sido importante en los sistemas eléctricos de utilización debido a que
como se dijo anteriormente este factor describe la forma en que la energía suministrada se
aprovecha. Actualmente, esta importancia se ha hecho más relevante debido al uso de cargas
no lineales, tales como aparatos electrónicos (televisiones de plasma, computadoras, ups,
entre otros) y rectificadores e inversores en mediana y alta potencia. Este tipo de cargas
disminuye la calidad de la energía en la fuente y en los puntos de consumo [7].
Es por tanto necesario un estudio continuo y actualizado del impacto que tienen estas cargas
y sus disturbios implícitos a la red. El análisis, diseño y mejora de dispositivos, que mediante
principios de ingeniería estimen estos impactos en la calidad de la energía, siempre serán
importantes. Este capítulo abordará en el análisis y la corrección del factor de potencia de
una carga dinámica en forma convencional así como una breve introducción a los sistemas
no lineales.
3.2.Corrección del factor de potencia
Se le denomina corrección del factor de potencia al proceso de introducir elementos reactivos
(comúnmente capacitivos) para llevar el factor de potencia a un valor cercano a la unidad,
estos elementos se conectan en paralelo con la carga, teniendo como objetivo disminuir el
ángulo entre S y P denominado θ. La consecuencia de la reducción en el ángulo entre la potencia real (P) y la potencia aparente (S) conlleva a que la utilización energética se
concentre en producir trabajo, caso contrario a un ángulo mayor entre S y P que significaría
que la energía se está utilizando en potencia reactiva (campos magnéticos de las bobinas o
27 En la Fig. 3.1 se muestran las potencias antes y después de un proceso de corrección de factor
de potencia.
Fig. 3.1 Triángulo de potencia de corrección del factor de potencia
En la Fig. 3.1, S1, θ1 y Q1 corresponden a los valores iniciales de potencia aparente, ángulo de factor de potencia y potencia reactiva del sistema, respectivamente. Mientras que S2, θ2 y Q2 son las magnitudes de los valores después de la corrección del factor de potencia mediante la adición de potencia reactiva capacitiva, QC. La magnitud de Q2 por lo tanto, es la diferencia entre Q1 y QC.
Fig. 3.2 Sumatoria fasorial de corrientes
También es importante analizar el efecto que tiene la adición de una corriente capacitiva al
28 consumida por el elemento reactivo capacitivo y la corriente demandada por la carga
inductiva, respectivamente [12].
Se puede notar que no sólo disminuye el ángulo original θ1 hasta θ2 sino que la magnitud del vector resultante I disminuye también; así mismo se puede notar que al aumentar la magnitud
de IC el ángulo entre V e I tiende a un valor cero, y por lo tanto un FP unitario. Se concluye entonces, que al existir una disminución de la corriente en el sistema, la energía consumida
por la carga es menor y por ende existe una menor demanda en la fuente.
3.3.Impacto de una carga dinámica sobre el sistema
La carga dinámica en este estudio es un motor (trifásico, jaula de ardilla) y se analiza el
comportamiento de su factor de potencia en diferentes condiciones de carga. Se observarán
las variables fundamentales (potencia activa, reactiva, factor de potencia, corriente y tensión
en terminales) que proveen información sobre el rendimiento del motor durante una prueba
de frenado electromagnético. La medición del factor de potencia se realizará tanto directa
como indirectamente en el circuito de la Fig. 3.3. Directamente utilizando un medidor de
factor de potencia e indirectamente, de acuerdo con [11], se utilizan dos wáttmetros para
medir la potencia en el sistema de alimentación eléctrico, que tiene carga balanceada.
El factor de potencia se calcula en función de las lecturas de los wáttmetros en la forma
siguiente [13]:
cos . cos .
cos . cos . (3.1)
tan √ (3.2)
29
Fig. 3.3 Diagrama eléctrico de conexión
En el diagrama el motor es conectado en delta con una tensión de línea de 230 V y una
corriente de línea nominal de 1.57 A, la conexión de los wáttmetros se realizan de manera
que las polaridades de las bobinas de potencial y de corriente coincidan con el diagrama de
manera que se pueda obtener el ángulo de desfasamiento, como se mostró en la ecuación 3.3.
3.4.Pruebas de rendimiento al motor trifásico
Se realizó una prueba de rendimiento al motor trifásico asíncrono jaula de ardilla, el cual se
conectó en delta de acuerdo al diagrama eléctrico de la Fig. 3.3. La corriente nominal del
motor, en conexión delta, es de 1.57 A con una tensión en terminales de 230 V, y una potencia
nominal de 370 W. Para realizar la prueba, se reguló la carga del motor mediante el freno
electromagnético para simular diferentes condiciones de carga; al variar la corriente de
excitación del freno electromagnético se desarrolla un par contrario al del motor, provocando
un aumento de carga.
En la Fig. 3.4 se pude observar la conexión física del circuito mostrado en la Fig. 3.3, que se
realizó en el laboratorio para llevar a cabo las mediciones previas y posteriores a la corrección
30
Fig. 3.4 Conexión física del circuito bajo prueba
Para el cálculo del ángulo θ se utiliza la ecuación 3.3 y se aplica la función coseno para obtener el factor de potencia en el motor. En la Tabla 3.1 se registran las mediciones directas
que indican el incremento del valor del factor de potencia en función de la corriente y tensión
nominales, una vez que estas dos variables aumentan, el factor de potencia mejora.
Tabla 3.1 Mediciones directas de las variables observadas
% carga
motor Pt (W) Pa (W) Pb (W) IL (A) VL (V) φ (grad) cosφ 25.0 114.0 161.0 -49.0 0.85 231.0 57.12 0.54 50.0 185.0 194.0 -12.0 0.90 231.0 55.07 0.57 75.0 277.5 240.0 37.0 1.03 231.0 48.91 0.66 100.0 370.0 287.0 82.0 1.19 231.0 42.70 0.73 125.0 462.5 330.0 129.0 1.37 231.0 36.68 0.80
Para el cálculo indirecto de las potencias en el motor se tiene:
(3.4)
tan (3.5)
31 Utilizando las ecuaciones de 3.3 a 3.6 se calculan indirectamente lo parámetros θ, P, Q y S, respectivamente; y los valores se registran en la Tabla 3.2, la cual muestra los resultados de
θ, P, Q y S para las diferentes condiciones de carga a las cuales se probó el motor.
Tabla 3.2 Mediciones indirectas de las variables observadas
φ (grad) cos(φ) P (W) Q (VAR) S (VA)
57.12 0.54 114.0 176.37 210.01 55.07 0.57 185.0 264.88 323.09 48.91 0.66 277.5 318.20 422.21 42.70 0.73 370.0 341.44 503.47 36.68 0.80 462.5 344.48 576.69
Se puede observar el triángulo de potencias para un 25% de carga y para una carga nominal
en la Fig. 3.5 a) y Fig. 3.5 b), respectivamente.
Fig. 3.5 Triángulos de potencias
La Fig. 3.5 muestra el cambio del ángulo del factor de potencia en el motor cuando se
modifican sus condiciones de carga, esto es, si la carga del motor es cercana a la nominal el
ángulo del factor de potencia tiende a disminuir Fig. 3.5 a). Por el contrario, el ángulo del
factor de potencia aumenta si la carga no es la nominal Fig. 3.5 b). Los resultados anteriores
indican que un sistema industrial, en el cual existen cargas dinámicas similares fuera de sus
valores nominales, se tendrá una demanda mayor de corriente y la corrección del factor de
32
3.5.Corrección del factor de potencia al motor trifásico bajo prueba
Para corregir el factor de potencia, es necesario introducir en el sistema bajo prueba un banco
de capacitores de un valor aproximado o igual al de la potencia reactiva consumida por el
motor que en su caso nominal es de 341.44 vars (como se registró en la Tabla 3.2), la carga
capacitiva utilizada en la prueba se muestra en la Fig. 3.6. Las ecuaciones 3.7 y 3.8 se utilizan
para calcular el valor del banco de capacitores necesarios para generar la potencia reactiva
capacitiva.
Fig. 3.6 Módulo de carga capacitiva 3x105 vars
(3.7)
(3.8)
Sustituyendo los valores experimentales de carga nominal en las ecuaciones 3.7 y 3.8:
. . Ω
. Ω .
Para un factor de potencia cercano a la unidad:
33 Para realizar la corrección del factor de potencia el banco de capacitores se conecta de la
misma forma que el motor, es decir, en delta. Para comenzar con la corrección del factor de
potencia convencional se conectó el módulo de carga mostrado en la Fig. 3.6 el cual es una
carga con características reactivas capacitivas de 0 a 103 vars capacitivos por fase, con una
tensión nominal en delta de 230 V.
La conexión en paralelo de los capacitores es mostrada en la Fig. 3.7.
Fig. 3.7 Diagrama de conexión para la corrección del factor de potencia
Para realizar las mediciones correspondientes se utilizó el medidor de calidad de la energía
FLUKE 43B. También con este equipo se obtuvieron las mediciones de potencia activa,
reactiva y aparente, y los espectros de Fourier de armónicos además del factor de potencia.
Posteriormente, en el circuito de la Fig. 3.7 se ajustaron las posiciones del banco de
capacitores (desde una posición 1 hasta una posición 6 que equivale a 264.86 vars) como lo
muestra la Tabla 3.3. Es importante notar que al compensar el factor de potencia, los vars del
sistema tienden a un valor de 9 vars, lo cual es benéfico para este sistema ya que el factor de
potencia es igual a 1.0 como se registra en la Tabla 3.3
En la Tabla 3.3 se registra que el factor de potencia aumentó desde 0.79 sin capacitores hasta
1.0 (reactivos capacitivos agregados 264.86 var) en el sexto paso del selector de magnitud
del banco de capacitores. El factor de potencia se mejoró con la carga capacitiva en la
34 Tabla 3.3 Valores de medición directa para la corrección del factor de potencia
Posición Potencia Reactiva Capacitiva (var) Corriente continua (A) Tensión (Vcd)
Potencia real (W)
Corriente de línea (A)
Tensión de línea (V) Factor de Potencia (FP) Potencia real (W) Potencia aparente (VA) Potencia reactiva (var)
0 0.0 0.04 88.0 360.0 1.13 231.0 0.79 365.0 471.0 289.0
1 44.14 0.04 88.0 379.0 1.07 232.0 0.86 383.0 445.0 229.0
2 88.29 0.04 88.0 360.0 1.0 232.0 0.94 362.0 414.0 199.0
3 132.43 0.04 88.0 364.0 0.93 232.0 0.94 371.0 396.0 138.0
4 176.57 0.04 88.0 368.0 0.9 233.0 0.96 370.0 386.0 112.0
5 220.71 0.04 88.0 370.0 0.87 233.0 0.99 372.0 374.0 41.0
6 264.86 0.04 88.0 370.0 0.87 232.0 1.0 372.0 372.0 9.0
Valores medidos con el módulo DL 30061
Valores medidos con el instrumento FLUKE 43B
Esto es, un factor de potencia alto contribuye a una disminución en la energía demandada al
sistema, reflejándose en la disminución de la corriente de línea consumida por el motor. Esto
se aprecia mejor en la , la cual demuestra, en primer lugar, la disminución de la corriente de
línea desde 1.13 hasta 0.87 amperes equivalente a una reducción del 23.01% y en segundo
lugar, el mejoramiento del factor de potencia del sistema.
35
3.6.Estudio armónico preliminar en la compensación del factor de potencia de la carga dinámica
Un aspecto importante a estudiar es la amplificación de armónicos por parte de los
capacitores que, a pesar de ser cargas que en estado estable operan linealmente, generan un
aumento de corriente cuando son alimentados con una tensión a frecuencia fundamental (y
que puede presentar componentes armónicos con frecuencias múltiplos de la fundamental).
El aumento de corriente se produce debido a que la reactancia se reduce con la frecuencia
por la relación inversa que se establece en la ecuación 3.9.
(3.9)
En el caso de la carga dinámica que se estudia en este trabajo se observó que al aumentar la
corriente se acentúan los armónicos ya existentes en el sistema.
Fig. 3.9 Distorsión armónica de corriente y tensión
En la Fig. 3.9 se muestra el concentrado de los resultados obtenidos en el Apéndice A, en la
cual se determinó que la distorsión armónica de la corriente pasa de un valor de 4.6% (sin
corrección del factor de potencia) a un 6.2% (con corrección del factor de potencia).
Esto demuestra que la corrección del factor de potencia, con bancos de capacitores en
36 Con este resultado se puede prever que la introducción de un rectificador-inversor la
distorsión armónica puede aumentar, ya que se podría generar un circuito resonante. Esto se
debe a que la reactancia capacitiva originada por el banco de capacitores en conjunto con la
reactancia inductiva del sistema más la reactancia inductiva de la red, provoca que a cierta
frecuencia fr el circuito se ponga en resonancia amplificando la corriente lo cual puede provocar un daño en el banco de capacitores y el equipo conectado al sistema, en este caso
el motor y la fuente de alimentación. De acuerdo con [12] el orden de armónica que
provocaría resonancia en el sistema está dado por la ecuación 3.10. Este análisis se hará con
mayor detalle posteriormente en la sección 5.1:
(3.10)
Donde fr es definido por [6] como:
(3.11)
Donde:
Potencia de corto circuito donde esta conectado el banco de capacitores
37
4.1.Introducción
Un convertidor, como su nombre lo indica es un dispositivo electrónico que se encarga de
convertir energía eléctrica de una tensión, corriente, frecuencia o forma de onda a otra. Un
convertidor común es el variador de velocidad en motores de corriente alterna, generalmente
motores jaula de ardilla escogidos debido a su construcción robusta y bajo costo de
mantenimiento. El variador de velocidad se compone principalmente de un rectificador y un
inversor, en ambos dispositivos electrónicos se produce distorsión en las formas de onda de
corriente y tensión. En la Fig. 4.1 se puede observar un diagrama a bloques de la
configuración del circuito del variador de velocidad con convertidores de modo conmutado.
Fig. 4.1 Diagrama de convertidores para la alimentación de un motor de CA
La razón de que se usen convertidores de modo conmutado reside en la característica de las
ondas de tensión y corriente que se presentan en el motor, debido a lo anterior el flujo de
potencia en cada convertidor oscilara desde la fuente a la carga y desde la carga a la fuente.
Como se muestra en la Fig. 4.1 los convertidores deben funcionar como inversores o como
rectificadores dependiendo del signo de las corriente y tensión, que a su vez, definen el
sentido de la potencia instantánea. Otro uso muy común con el arreglo de la Fig. 4.1 es el de
38 Como se mencionó anteriormente, los convertidores de electrónica de potencia son una causa
importante de las perturbaciones en los sistemas eléctricos de potencia, debido a su
funcionamiento provocan la distorsión de la forma de onda del suministro o fuente de
alimentación. Estos disturbios en la red se dan en forma de inyección de armónicos a la fuente
y también producen EMI (Electromagnetic Interference). Como se menciona en [3], en la
Fig. 4.2 se puede apreciar cómo afectan las corrientes armónicas al sistema de suministro en
el punto de acoplamiento común (PCC).
Fig. 4.2 Diagrama a bloques del suministro de energía con carga no lineal
En la Fig. 4.2 se puede notar que al existir una carga de electrónica de potencia la fuente tiene
que administrar corriente con alto contenido armónico; por otra parte se tiene que, debido a
la impedancia de la fuente de alimentación considerada en la Fig. 4.2 sólo como Ls la tensión en el punto común PCC se ve distorsionada provocando muy probablemente un mal
funcionamiento en las cargas conectadas a este punto de acoplamiento.
El factor de potencia se ve afectado a consecuencia de los armónicos producidos, esta
relación se puede apreciar claramente en la ecuación 4.1.
(4.1)
donde:
39 Is = Corriente rms total [A]
DPF = Factor de Potencia de Desplazamiento
El factor de potencia de desplazamiento está definido como:
cos (4.2)
donde:
θ1 = Es el ángulo de desplazamiento entre la componente de corriente de frecuencia fundamental respecto a la forma de onda de la tensión de entrada
De las ecuaciones 4.1 y 4.2 se observa que es necesario, para obtener un factor de potencia
elevado, tener un factor de potencia de desplazamiento alto y armónicos de la corriente bajos
para obtener una alta relación de corriente I1/ I
La ecuación 4.1 junto con la ecuación 4.2 es de gran importancia para entender la estrecha
relación que mantienen la distorsión armónica y el factor de potencia en un sistema en donde
existen comportamientos tanto de tensión como de corrientes no lineales.
4.2.Operación y características de rendimiento en rectificadores
Para el análisis que se hará posteriormente sobre la corrección del factor de potencia es
necesario conocer el rendimiento en un rectificador monofásico de onda completa y en un
rectificador trifásico; existen no controlados o controlados por la tensión de línea (diodos) y
controlados (tiristores, GTOs, MOSFETs, IGBTs) en esta sección se explicarán los no
controlados.
4.2.1. Rectificador monofásico de puente completo
La rectificación, como su nombre lo indica sirve para convertir energía eléctrica de una
tensión y corriente alterna a una continua lo cual se logra, en su forma monofásica con el
40 El funcionamiento del puente rectificador consiste en que los diodos superiores D1 y D3
comparten el mismo potencial en el cátodo, por lo tanto el diodo con el potencial más alto en
el ánodo conducirá; en el grupo inferior de diodos D2 y D4 tienen un punto común en el
ánodo por lo tanto el diodo que tenga en su cátodo el potencial más bajo conducirá.
Fig. 4.3 Rectificador monofásico de puente de diodos
De lo anterior se tiene que, al aplicar una tensión y corriente sinusoidal durante el semiciclo
positivo el diodo 1 y el diodo 2 serán los que conduzcan la corriente id; mientras que para el
semiciclo negativo los diodos 3 y 4 conducirán la corriente id. La tensión salida del
rectificador vd tendrá un rizado elevado por consiguiente se coloca un capacitor de un valor
alto para que se cargue a un valor cercano al valor pico de la tensión VS y realice un filtrado de la tensión de salida vd. De acuerdo con [2] se tienen los siguientes parámetros de
rendimiento en un rectificador monofásico de puente completo:
Cabe mencionar que, debido al capacitor a la salida del rectificador, este toma potencia del
lado de corriente alterna sólo por intervalos de tiempo pequeños, por lo tanto, la corriente de
salida demandada será pulsante y con un alto valor pico, consecuentemente, se tendrá una
corriente de entrada con alto contenido armónico y el factor de potencia será pobre alrededor
de 0.65 [14].
La tensión promedio de salida se calcula como se muestra en la ecuación 4.3:
sen
⁄
41 La corriente de entrada se expresa en la ecuación 4.4 como una serie de Fourier:
cos sen
, ,…
(4.4)
En donde el valor de corriente directa y las constantes se calculan con las ecuaciones 4.5, 4.6
y 4.7:
(4.5)
cos cos (4.6)
sen
sen
(4.7)
Sustituyendo los valores de an y bn en la ecuación 4.4 para la corriente de entrada se tiene:
sen sen sen
⋯ (4.8)
El valor rms de la componente fundamental de la corriente de entrada es:
√ . (4.9)
De la ecuación 2.8 para el factor armónico
.
⁄
. . % (4.10)
Para el cálculo del factor de potencia se observa que el ángulo de desplazamiento entre la
42 De acuerdo con la ecuación 4.11 se tiene que:
.
∙ . (4.11)
La eficiencia se calcula como muestra la ecuación 4.12
.
. % (4.12)
El factor de forma de define:
.
. . % (4.13)
El factor de rizo es:
. . . % (4.14)
4.2.2. Rectificador trifásico de seis pulsos
Los rectificadores trifásicos de seis pulsos ofrecen una salida de mayor calidad que un
rectificador monofásico con menores ondulaciones y mayor capacidad en el manejo de
potencia, en esta sección se explicarán sus parámetros y se compararán con los del
rectificador monofásico, es importante destacar que en el desarrollo de las pruebas en
laboratorio sólo se utilizará el rectificador monofásico, las consideraciones teóricas
mostradas a continuación sirven de referencia para entender las diferencias entre ambos
rectificadores.
El funcionamiento del rectificador de seis pulsos se basado en el mismo principio que el
rectificador monofásico, un diodo del grupo superior y del grupo inferior conducen la
corriente id tomando en cuenta que el diodo del grupo superior que tenga más potencial en su
ánodo conducirá y el diodo del grupo inferior que tenga menor potencial en el cátodo
43
Fig. 4.4 Rectificador trifásico de puente completo
A continuación se muestran los parámetros de rendimiento para éste tipo de rectificador de
acuerdo con [2].
La tensión promedio de salida es
/ √ cos
⁄
√
. (4.15)
Donde Vm es la tensión pico de fase. La tensión rms de salida es
/ cos
⁄
√ /
.
(4.16)
Para un rectificador con 6 pulsos por ciclo, las armónicas de la tensión de salida son: la 6ª,
12ª, 18ª y 24ª. La serie de Fourier para la tensión de salida v0 se expresa como
cos
, ,…
(4.17)
La eficiencia se calcula en la ecuación 4.18.
.
44 El factor de forma de define en la ecuación 4.19.
.
. . . % (4.19)
El factor de rizo se calcula según la ecuación 4.20.
. . % (4.20)
Para el cálculo del factor de potencia se calcula el valor rms de la corriente fundamental así
como el valor rms de la corriente de entrada como sigue:
√
. (4.21)
. (4.22)
cos cos (4.23)
cos .. . (4.24)
Las ecuaciones 4.11 y 4.24 muestran la eficiencia de un rectificador monofásico de puente
completo y uno trifásico de puente de seis pulsos que va de 0.90 en el monofásico a 0.9549
en el trifásico. Por otra parte el factor de desplazamiento en ambos casos se considera 1,
debido a la condición de que la carga sea puramente resistiva, la corriente se desfasa ciertos
grados cuando la carga es inductiva como en el caso a estudiar que se refiere al motor trifásico
jaula de ardilla. Por consiguiente se espera una disminución del factor de potencia
considerable a los establecidos en las ecuaciones 3.11 y 3.24. También cabe recalcar que los
cálculos anteriores se realizaron considerando diodos ideales, por lo tanto habrá una variación