Instituto Politécnico
Nacional
S
ECCIÓN DEE
STUDIOS DEP
OSGRADO EI
NVESTIGACIÓNE
SCUELAS
UPERIOR DEI
NGENIERÍAM
ECÁNICA YE
LÉCTRICAU
NIDADZ
ACATENCOD
ISEÑO
M
ECÁNICO DE UN
E
XOESQUELETO PARA
R
EHABILITACIÓN
DE
M
IEMBRO
S
UPERIOR
QUE PARA OBTENER EL GRADO DE
MAESTRO EN CIENCIAS EN INGENIERÍA
MECÁNICA
Asesores:
Dr. Guillermo Urriolagoitia Sosa
Dr. Guillermo Manuel Urriolagoitia Calderón
P R E S E N T A:Resumen
Los exoesqueletos se clasifican en diversas categorías, el desarrollo del presente trabajo se basa en los enfocados a un segmento del cuerpo (miembro superior) y en la de finalidad que se le va dar (rehabilitación). Actualmente existen varios diseños e investigaciones en esta área, pero un número importante de estos son para población anglosajona o de países europeos, con los cuales un número mínimo de la población mexicana coincide, esto se debe principalmente a que la población mexicana es más baja de estatura por lo cual la longitud de las extremidades disminuye.
En el presente trabajo se realiza el diseño de un exoesqueleto para rehabilitación de miembro superior enfocados a la población mexicana, para ello se realiza un estudio de la historia y evolución de los exoesqueletos de rehabilitación hasta llegar a abordar los sistemas más recientes en este aspecto.
Posteriormente se analiza la biomecánica del miembro superior con la finalidad de entender y comprender como se realizan los movimientos desde un punto de vista mecánico y así poder realizar una analogía para posteriormente plasmarla en un mecanismo capaz de reproducir esos movimientos.
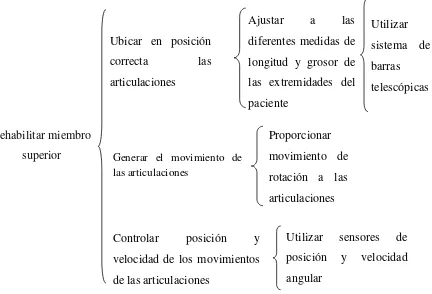
Una vez analizado los movimientos, se procede a realizar el diseño conceptual del dispositivo, basado en la herramienta de diseño Blitz QFD, para ello primero se recopilan todos los parámetros que debe tener el exoesqueleto, se agrupan primero de acuerdo a la función que van a desarrollar y luego por la prioridad que tiene cada uno de ellos, terminado eso se procede a realizar una lluvia de ideas para cumplir cada una de las funciones que se obtienen de realizar el análisis funcional del dispositivo, se aplican los filtros indicados en la metodología obteniendo como resultado un diseño que cumple con las características deseadas.
Posteriormente se analiza el diseño tanto en rangos de funcionalidad como estructurales para que sea capaz de soportar el trabajo al cual será sometido, para ello se ocupa la cinemática del manipulador y se realizan los análisis mediante un programa de elemento finito.
Abstract
The exoskeletons can be divided into different categories, the development of this work is based on the classification focusing on a segment of the body (upper limb) and the purpose of that is going to give (rehabilitation). Currently there are several designs and researches in this area, but a significant number of these are for USA population or European countries, with which a minimum number of matches Mexican population, this is due primarily that Mexican population is lower height so their limb length decreases.
The present paper is focused in the mechanical design of an upper limb rehabilitation exoskeleton for the Mexican population, for it, this start with a study of the history and evolution of the exoskeletons of rehabilitation to reach newer systems addresses this aspect.
Then the biomechanics of the upper limb is analyzed in order to understand and comprehend how the movements are performed from a mechanical point of view so we can make an analogy to then translate it into a mechanism able to reproduce those movements.
After analyzing the movements, we proceed to perform the conceptual design of the device based on Blitz QFD design tool, for it is first collected all parameters that the exoskeleton must have, are grouped first according to the function that will develop and then the priority of each, that will be done to make brainstorming to meet each of the functions that are obtained to perform the device functional analysis, the filter applies that the methodology specified and obtaining as result a design which meets desired characteristics.
Subsequently, the design is analyzed both as structural functionality ranges to be capable of supporting the work which will be subjected, for it use the kinematics of the manipulator and analysis are performed by a finite element software.
Agradecimientos
A Dios
Por haberme permitido llegar a esta etapa de mi vida.
A mis padres Dulía y Francisco
Por haberme ayudado a sobreponer de las dificultades que se me presentaron al inicio de mi camino en la vida, por sus consejos y regaños que me han forjado trayéndome hasta este punto, y sobre todo por siempre haberme apoyado en cada decisión que he tomado.
A mis hermanos Fátima y Gabriel:
Por haber ayudado en muchos momentos, por soportar mis enojos, mis desvaríos, mis momentos de egocentrismo.
Así como un agradecimiento a mis demás familiares que de alguna u otra forma me ayudaron a conseguir esta meta.
A mis amigos
Por estar siempre que los necesite, por sus consejos ya fueran para la escuela o para la vida diaria, por los momentos de alegría y también de tristeza o enojo, las desveladas, las fiestas, por todo lo que he vivido con ustedes, a los que llevo conociendo ya hace varios años, así como a los nuevos que conocí en esta etapa.
A los doctores del área de Biomecánica
Gracias a sus enseñanzas, pláticas y consejos, he podido llegar a la meta de graduarme de la Maestría ya que de alguna u otra forma han ayudado a moldear este camino que hoy concluye en lo académico, así como a los profesores de las otras áreas con los cuales tuve clases, que me han sido de gran utilidad para poder llevar a buen término esta tesis.
Al INSTITUTO POLITECNICO NACIONAL, del cual me he graduado por tercer nivel, pasando por nivel Técnico, Licenciatura y ahora Maestría, considerándome orgullosamente politécnico por convicción y no por circunstancia.
Índice General
Resumen i
Abstract ii
Índice General iv
Índice de Figuras ix
Índice de Tablas xiii
Objetivo general xiv
Justificación xiv
Introducción xv
Capítulo I.- Estado del Arte 1
I.1.- Introducción 2
I.2.- Exoesqueletos 2
I.2.1.- Antecedentes generales 3
I.2.2.- Clasificación 4
I.3.- Rehabilitación 7
I.3.1.- Definición 7
I.3.2.- Antecedentes 9
I.3.3.- Rehabilitación en México 10
I.4.- Exoesqueletos desarrollados para miembro superior 12 I.4.1.- Exoesqueleto de 4 GDL de la Universidad de Saga 12
I.4.2.- CADEN-7: Exoesqueleto7 GDL 13
I.4.3.- Exoesqueleto de 7 GDL “Soft-Actuaded” 14
I.4.4.- ARMin Robot 14
I.4.5.- MAHI 15
I.4.6.- W-EXOS: Wrist Axes Offset (Desplazamiento de ejes de la muñeca) 16 I.4.7.- ASSIST: órtesis de soporte activo (Active Support Splint) 16 I.4.8.- Exoesqueleto para Movimientos de mano y dedos 17 I.4.9.- NEUROexos: Exoesqueleto Neurorobótico (Neurobotics
exoskeleton) 17
I.4.10.- Exoesqueleto para asistencia del movimiento del codo 18 I.4.11.- Interacción háptica con ambiente virtual utilizando un exoesqueleto
del brazo
19
I.4.13.- Exoesqueleto mecatrónicos para rehabilitación motora 19 I.4.14.- Exoesqueleto para la articulación del hombro 20 I.4.15.- IROS: Sistema Inteligente (Intelligent Rehabilitative Orthotic
System)
21
I.4.16.- RUPERT: Robot asistente para terapia de rehabilitación de
extremidad superior (Robotic assisted upper extremity repetitive therapy) 21
I.5.- Planteamiento del problema 22
I.6.- Sumario 23
I.7.- Referencias. 23
Capítulo II.- Marco teórico 27
II.1.- Introducción 28
II.2.- Procedimientos de rehabilitación. 28
II.3.- Mecánica del manipulador 29
II.3.1.- Grados de libertad y tipos de articulaciones. 29
II.3.2.- Cinemática del manipulador 30
II.4.-Sistemas de impulsión y actuación. 35
II.4.1.-Motores eléctricos 35
II.4.1.1- Servomotores 35
II.4.2.- Sensores 36
II.5.- Metodología de diseño 38
II.5.1.-Modelos descriptivos del diseño 39
II.5.2.-Modelos prescriptivos 41
II.6.-Diseño conceptual 41
II.7.- Diseño a detalle 42
II.7.1.- Cargas y ciclos de trabajo 42
II.7.2.- Validación por Análisis de Elemento Finito 43
II.8.- Procesos de manufactura 44
II.9.- Sumario 45
II.10.- Referencias 46
Capítulo III.- Biomecánica del miembro superior 48
III.2.1.- Huesos 51
III.2.2.- Músculos 52
III.3.- Anatomía del Brazo 55
III.3.1.- Huesos 55
III.3.2.- Músculos 55
III.4.- Anatomía del Codo 57
III.5.- Anatomía del Antebrazo 57
III.5.1.- Huesos 57
III.5.2.- Músculos 57
III.6.- Biomecánica del miembro superior 58
III.6.1.- Biomecánica del hombro 58
III.6.1.1.- Flexoextensión 60
III.6.1.2.- Aducción 60
III.6.1.3.- La abducción 61
III.6.1.4.- Flexoextensión horizontal 62
III.6.1.5.- Movimiento de circunducción 64
III.6.1.6.- Articulaciones del hombro 65
III.6.2.- Biomecánica del codo 67
III.6.2.1.- La amplitud de los movimientos del codo 67 III.6.2.2.- Las limitaciones de la flexoextensión 68
III.6.3.- Biomecánica del Antebrazo 70
III.7.- Cinemática del miembro superior 71
III.8.- Cinética del miembro superior 71
III.9.- Sumario 74
III.10.- Referencias 75
Capítulo IV.- Diseño Conceptual 77
IV.1.- Diseño conceptual del dispositivo 77
IV.1.1.- Parámetros de diseño 77
IV.1.2.- Análisis funcional 79
IV.1.3.- Generación de conceptos para satisfacer las necesidades 79
IV.1.4.- Aplicaciones de filtros 81
IV.2.- Diseño Mecánico 82
IV.2.1.- Sistema del antebrazo 82
IV.2.1.1.- Determinación de las fuerzas involucradas en el sistema del antebrazo
83
IV.2.2.- Sistema del brazo 86
IV.2.2.1.- Determinación de las fuerzas involucradas en el sistema del brazo
87
IV.2.3.- Sistema del hombro 88
IV.2.4.-Sistema base 91
IV.3.-Sumario 93
Capitulo V.- Análisis de la estructura bajo condiciones de trabajo 95
V.1.- Introducción 96
V.2.- Espacio de trabajo 96
V.2.1.- Flexión del antebrazo 96
V.2.2.- Flexo-extensión del hombro en el plano sagital 97 V.2.3.- Abducción del hombro en el plano coronal (frontal) 98 V.2.4.- Flexo-extensión horizontal del hombro respecto al eje vertical 99
V.2.5.- Movimientos combinados 100
V.3.- Análisis por elemento finito de la estructura 104
V.3.1.- Análisis de los ejes 106
V.3.2.-Analisis de la sección del antebrazo 108
V.3.3.- Análisis de la sección del brazo y antebrazo 109 V.3.4.- Análisis de la estructura para la flexo-extensión en el plano sagital 110 V.3.5.- Análisis de la estructura de abducción del hombro en el plano
coronal (frontal) 111
V.3.6.- Análisis de la sección superior del dispositivo 112
V.3.7.- Análisis de la base del dispositivo 113
V.4.- Análisis de resultados 114
V.5.- Sumario 115
Capítulo VI.- Manufactura 116
VI.1.- Introducción 117
VI.2.2.- Torneado 118
VI.3.-Roscado 118
VI.4.- Construcción del prototipo 119
VI.5.- Sumario 122
VI.6.- Referencias 122
Conclusiones 123
Trabajos futuros 126
A n e x o s 128
Anexo A.- Servomotores 129
Anexo B.- Rodamientos 130
Anexo C.- Columna telescópica 135
Anexo D.- Normas para tornillería 137
Anexo D.- Publicaciones derivadas 139
Índice de Figuras
Figura I.1.- Clasificación de las órtesis según su funcionamiento [I.2]. a) Pasivas. b) Activas. 2 Figura I.2.- Primer exoesqueleto activo creado en 1969 en el Instituto Mihailo Pupin [I.5] 3 Figura I.3.- Primer exoesqueleto activo de miembro superior [I.5] 4
Figura I.4.- Clasificación de los exosqueletos 8
Figura I.5.- Máquina de Levacher [I.16] 9
Figura I.6.- Exoesqueleto de 4 GDL de la Universidad de Saga [I.18] 13 Figura I.7.- Usuario probando el exoesqueleto CADEN-7 compuesto por 3 configuraciones
[I.10]
13
Figura I.8.- Exoesqueleto impulsado por músculos neumáticos [I.19]. 14 Figura I.9.- Demostración de cómo un terapeuta programa una rutina [I.21] 15 Figura I.10.- Usuario operando el nuevo rediseño del exoesqueleto [I.24] 15 Figura I.11.- W-EXOS se mueve en los planos X, Y y Z [I.4] 16
Figura I.12.- Estructura del ASSIST [I.26] 17
Figura I.13.- Mano de un sujeto colocado en el exosqueleto [I.27] 17 Figura I.14.- Vista superior del prototipo de la articulación del hombro [I.28] 18 Figura I.15.- Prototipo del sistema mecánico del exoesqueleto del brazo [I.29] 18 Figura 1.16.- Demostración del funcionamiento del Sarcos Master [I.31] 19 Figura I.17.- Usuaria con el dispositivo de rehabilitación motora [I.32] 20 Figura I.18.- Modelo 3D del mecanismo propuesto para abducción lateral y frontal [I.33] 21 Figura I.19.- Evolución del exoesqueleto RUPERT. a) Versión I, b) Versión II y c) Versión
III.
22
Figura II.1.- Diagrama de estudio de la mecánica [II.6] 29
Figura II.2.- Articulaciones posible en un robot o mecanismo [II.7] 30
Figura II.3.- Parámetros de Denavit-Hartenberg 32
Figura II.4.- Encoder incremental [II.7] 37
Figura II.5.- Encoder absoluto [II.7] 38
Figura II.6.- Modelo de French [II.6] 40
[III.7].
Figura III.3.- Representación de los 3 GDL del hombro [III.15] 59 Figura III.4.- Flexo-extensión y aducción del hombro [III.15] 60 Figura III.5.- Movimiento de abducción del hombro [III.15] 62 Figura III.6.- Etapas del movimiento flexoextensión horizontal [III.15]. 64 Figura III.7.- Movimiento de circundicción en el hombro [III.15] 65 Figura III.8.- La amplitud de los movimientos del codo [III.15] 68
Figura III.9.- Flexo-extensión del codo [III.15] 70
Figura IV.1.- Análisis funcional del dispositivo 79
Figura IV.2.- Segmento del antebrazo en su longitud mínima 83 Figura IV.3.- Segmento del antebrazo en su longitud máxima 83 Figura IV.4.- Representación de las reacciones en la estructura del antebrazo 84 Figura IV.5.- Diagrama de cuerpo libre de reacciones en la estructura del antebrazo 84 Figura IV.6.- Representación de las fuerzas a las que es sometida la estructura 85
Figura IV.7.- Diagrama de cuerpo libre del antebrazo 85
Figura IV.8.- Estructura del brazo en longitud mínima 86
Figura IV.9.- Estructura del brazo en longitud máxima 87
Figura IV.10.- Representación de cargas en la estructura del miembro superior 88 Figura IV.11.- Diagrama de cuerpo libre de la cargas en la estructura del miembro superior 88 Figura IV.12.- Articulación para el movimiento de flexo-extensión 89 Figura IV.13.- Estructura que permite el movimiento de abducción frontal 90 Figura IV.14.- Estructura para soportar el servomotor del movimiento de abducción frontal 90 Figura IV.15.- Estructura de unión del exoesqueleto a la base 91 Figura IV.16.- Reconfiguración del dispositivo para el movimiento de flexo-extensión 91 Figura IV.17.- Sección de la base con sistema de ajuste de altura del hombro 92 Figura IV.18.- Sección de la base que permite el ajuste de ancho de espalda 92 Figura IV.19.- Dispositivo final. a) Configuración diestra, b) Configuración zurda. 93
Figura V.1.- Área de trabajo del antebrazo 96
Figura V.4.- Etapas del movimiento. a) Fase inicial, b) Extensión máxima, c) Flexión máxima
98
Figura V.5.- Área de trabajo del movimiento de abducción 98
Figura V.6.- Etapas del movimiento de abducción del hombro. a) Ángulo inicial, b) Ángulo final
99
Figura V.7.- Área de trabajo de la flexo-extensión en el eje vertical 99 Figura V.8.- Exoesqueleto realizando el movimiento de flexo-extensión. a) Posición inicial,
b) Flexión máxima, c) Extensión máxima
100
Figura V.9.- Modelo cinemático del movimiento de la flexo-extensión en torno al plano sagital combinado con flexión en el codo
101
Figura V.10.- Área de trabajo del movimiento de la flexo-extensión en torno al plano sagital combinado con flexión en el codo
102
Figura V.11.- Movimiento de abducción de la articulación del hombro en torno al plano frontal junto con flexión del codo
102
Figura V.12.- Área de trabajo tridimensional 103
Figura V.13.- Modelo cinemático del movimiento de flexo-extensión en el eje vertical del hombro y flexión del codo
104
Figura V.14.- Área de trabajo de flexiones combinadas del hombro y codo 104 Figura V.15.- Esfuerzo de von Mises resultante en el eje de flexión del antebrazo 106 Figura V.16.- Deformación total sufrida por el eje de flexión del antebrazo 107 Figura V.17.- Esfuerzo de von Mises resultante en del 2do eje 107
Figura V.18.- Deformación total sufrida por el 2do eje 107
Figura V.29.- Esfuerzo resultante de la sección superior del dispositivo 113 Figura V.30.- Deformación total de la sección superior del dispositivo 113 Figura V.31.- Esfuerzo resultante en la base del dispositivo 114 Figura V.32.- Deformación total sufrida por la base del dispositivo 114
Figura VI.1.- Sección del antebrazo. a) Subsecciones, b) Longitud mínima, c) Longitud máxima
119
Figura VI.2.- Sección del brazo. a) Subsistemas, b) Longitud mínima, c) Longitud máxima 120
Figura VI.3.- Correas de sujeción 120
Figura VI.4.- Secciones de la estructura del hombro 121
Índice de Tablas
Tabla I.1.- Porcentaje de población por grupos de edad según tipo de discapacidad, año 2000 [I.15]
11
Tabla I.2.- Distribución porcentual de población por tipo de discapacidad según grupos de edad en el año 2000 [I.15]
12
Tabla II.1.- Parámetros de Denavit-Hartenberg [II.9] 33
Tabla III.1.- Peso segmentario/relaciones de peso corporal de varios estudios [III.18] 72 Tabla III.2.- Medidas estándar de un percentil 50 en Latinoamérica [III.19] 72 Tabla III.3.- Longitudes de segmentos de la extremidad superior [III.20] 73 Tabla III.4.- Centros de masa/relación de longitud del segmento (en porcentaje) [III.18] 73
Tabla IV.1. - Clasificación de los parámetros 78
Tabla V.1.- Parámetros de Denavit-Hartenberg para el movimiento de la flexo-extensión en torno al plano sagital combinado con flexión en el codo
101
Tabla V.2.- Parámetros de Denavit-Hartenberg para el movimiento abducción del hombro en torno al plano frontal junto con flexión del codo
103
Tabla V.3.-Parametros de Denavit-Hartenberg del movimiento de flexo-extensión en el eje vertical del hombro y flexión del codo
104
Objetivo general
Realizar el diseño mecánico de un sistema para lograr la rehabilitación del miembro superior, comprendiendo las regiones desde el hombro hasta el antebrazo, que se ajuste a las dimensiones de la población adulta mexicana, particularmente de las ciudades México D.F. y Guadalajara, Jalisco. Para poder alcanzar este objetivo, es necesario realizar objetivos particulares que se enlistan a continuación:
Establecer un estado del arte correspondiente a las investigaciones y desarrollos tecnológicos relacionados con sistemas de rehabilitación del miembro superior.
Conocer la anatomía del miembro superior así como la biomecánica de los movimientos que puede realizar y los rangos de amplitud de los mismos.
Establecer los rangos de longitud de la extremidad superior en la población adulta mexicana de las ciudades de México D.F. y Guadalajara, Jalisco; así como el resto de los datos antropométricos necesarios.
Elegir la herramienta de diseño adecuada, para lograr realizar en una primera instancia un diseño conceptual adecuado, para posteriormente obtener el diseño final apoyado con análisis de elemento finito.
Justificación
El miembro superior, es una de las regiones más importantes del cuerpo humano, ya que muchas de las actividades de la vida cotidiana son realizadas utilizando dicha región; aunque sean realizadas en su etapa final por la mano, el resto del miembro es importante para poder ubicarla en la posición correcta; sin embargo, al realizar las actividades se pueden presentar traumas y/o enfermedades que dañan y limitan físicamente la capacidad de movimiento, siendo los músculos los principales afectados por la reducción de movimiento.
necesitan cuidados especiales en los siguientes tres meses y cerca de una tercera parte de los sobrevivientes quedan con una discapacidad grave permanente, que requiere ser atendida.
Actualmente en la mayoría de los lugares de rehabilitación, las terapias son de forma manual, lo que ocasiona fatiga en el terapeuta aunado a que las terapias no tengan una evolución constante, retrasando el tiempo de recuperación del paciente. Sin embargo, contar con un sistema automático, que pueda realizar las terapias de forma controlada, permitirá tener un mayor control sobre las sesiones de terapia, así como de los parámetros que debe cumplir en cada una, y con la seguridad de que cada repetición de la rutina, será la adecuada, eliminando la incertidumbre de que el terapeuta pueda aplicar mayor o menor fuerza así como no cumpla con el rango de movimiento indicado.
Introducción
El diseño de exoesqueletos es un tema relativamente nuevo, ya que los primeros diseños son de la década de los 1960, siendo investigados principalmente con aplicaciones militares, aunque rápidamente se extendió a otras áreas principalmente la médica donde en una primera instancia se enfocó al miembro inferior con el fin de apoyar a la marcha, posteriormente se empezaron a diseñar dispositivos para apoyar en la rehabilitación de miembro superior.
La rehabilitación física es un proceso que se debe realizar en etapas, partiendo de los movimientos mínimos que puede realizar el paciente hasta llegar a reproducir rangos aproximados a los que se desarrollaban antes de sufrir la discapacidad; estos procesos llegan a ser largos lo que implica también un desgaste físico en el terapeuta que realiza la rutina ya que debe realizar el esfuerzo para mover el miembro superior del paciente, derivando en que las rutinas sean de poca duración y por lo tanto la recuperación sea más lenta; en cambio un sistema robótico no tiene esas limitantes, el terapeuta solo supervisara la terapia, ajustando el exoesqueleto a las dimensiones del paciente, y estableciendo los parámetros que se debe cumplir por casa sesión y para cada usuario.
Capítulo I.-
Estado del Arte
I.1.- Introducción
El ser humano realiza muchas de las actividades de la vida diaria utilizando sus miembros superiores, que van desde las más simples tales como comer, vestirse, bañarse hasta complejas que puede ser conducir un automóvil o manipular el control de una consola de video juego. Por ello, es una de las partes del cuerpo que están más propensas a ser afectadas por enfermedades o traumas; para lograr su recuperación es necesaria la utilización de aparatos externos y/o de terapias de rehabilitación física, lo que ha generado que en épocas recientes se diseñen exoesqueletos enfocados a la rehabilitación del miembro superior.
I.2.- Exoesqueletos
La órtesis se define como un aparato usado para modificar las características funcionales o estructurales del sistema neuronal-muscular-esquelético. Las órtesis se pueden clasificar de modo general en 2 grupos, según su principio de funcionamiento (Figura I.1) [I.1]:
Figura I.1.- Clasificación de las órtesis según su funcionamiento [I.2]. a) Pasivas. b) Activas. a) Pasivas.- Aparatos cuyo diseño contempla únicamente partes mecánicas; la mayoría
de los diseños existentes no permiten el movimiento en ninguna de las articulaciones del cuerpo.
b) Activas.- Una aplicación son los exoesqueletos, que consisten en un mecanismo estructural externo acoplado a la persona, cuyas junturas y eslabones corresponden a las de la parte del cuerpo humano que emula. El contacto entre el usuario y el
utilizan actuadores para proveer la fuerza y la movilidad de las articulaciones. Generalmente son controlados por una unidad central de procesamiento a la que se conectan sensores y actuadores.
Un exoesqueleto, se define como un sistema biomecatrónico, donde el mecanismo está adaptado a la estructura física del cuerpo humano, con un control que puede provenir de las mismas señales del cerebro, con sensores conectados a la piel humana y con actuadores que son analógicos a las funciones del cuerpo, todos estos elementos pueden actuar como un solo sistema integrado que puede desarrollar variadas actividades [I.3].
I.2.1.- Antecedentes generales
[image:21.612.232.399.412.609.2]Los exosqueletos fueron estudiados para propósitos de aplicaciones industriales y médicas desde la década de 1960; adicionalmente algunos exoesqueletos fueron desarrollados con el propósito de incrementar las capacidades humanas al inicio de la década de 1990 [I.4]. El primer exoesqueleto activo (Figura I.2) fue diseñado en 1969, por el profesor Vukobratovic en el Instituto Mihailo Pupin, localizado en la actual Serbia, enfocándose en el miembro inferior; impulsado neumáticamente y con una programación cinemática mínima, para producir una marcha antropomórfica mínima[I.5].
antropomórfico colocado dentro de un robot esclavo más grande y era usado para amplificar la fuerza humana [I.6].
En 1982, se desarrolló con éxito una órtesis activa de miembro superior para rehabilitación de casos avanzados de distrofia y enfermedades similares (Figura I.3); era controlado por medio de un joystick [I.5].
Figura I.3.- Primer exoesqueleto activo de miembro superior [I.5]
Se considera que los pioneros son proyectos de la extinta URSS, Japón, Estados Unidos, Canadá, y algunos países europeos como Suiza, Italia, Francia y Alemania [I.7].
I.2.2.- Clasificación
Los exoesqueletos se dividen en dos grupos según la aplicación final del exoesqueleto de acuerdo a [I.7]:
a) Los exoesqueletos amplificadores de potencia.- Fueron los primeros en ser desarrollados, su finalidad en aumentar la capacidad, principalmente de fuerza y carga, del miembro en el que es aplicado.
creciente desarrollo de grupos en bioingeniería, se pueda lograr pronto este objetivo con un producto ergonómico.
Los exoesqueletos de miembros superiores forman parte de un grupo de sistemas robóticos denominados robots portátiles (Wearable Robots) [I.8], estos son sistemas robóticos que visten el cuerpo humano para cumplir funciones específicas; estas funciones los catalogan en los siguientes subgrupos:
a) Robots Ortópticos.- Son sistemas cuya función es reemplazar las funciones un miembro perdido.
b) Robots Prostéticos.- Su función es la de rehabilitar un miembro que se encuentra atrofiado, sea por un accidente o por una deficiencia patológica.
c) Robots Extensores.- Su función es la de aumentar las habilidades del miembro al que está unido, esta habilidad está relacionada con la fuerza.
Otros autores dividen el estudio de los exoesqueletos en dos partes, en la primera, están los sistemas unidos a los brazos, denominados, exoesqueletos de partes superiores, y en la segunda aquellos sistemas que están unidos a las piernas, denominados exoesqueletos de partes inferiores [I.9]. Las aplicaciones potenciales de los exoesqueletos de partes superiores están enfocadas en [I.10]:
a) Recuperaciones terapéuticas.- El paciente usa un exoesqueleto que lleva a cabo la tarea basada en la terapia ocupacional o física de modo activo o pasivo.
b) Sistema de asistencia para labores de amplificación de la fuerza humana.- El usuario siente las cargas reducidas a escala durante la interacción con los objetos, la mayor parte de la carga es soportada por el exoesqueleto.
d) Dispositivo maestro para procesos de Teleoperación.- Se reemplaza el ambiente virtual por un robot real, el operador usa el exoesqueleto para control el sistema robótico en el modo de Teleoperación (maestro/esclavo), donde el exoesqueleto retroalimenta al usuario las fuerzas generadas por la interacción del robot con el ambiente.
Los exoesqueletos se clasifican en tres categorías de acuerdo a la sección del cuerpo a la que son aplicados [I.10]:
a) Para extremidades o miembros superiores.
b) Para extremidades o miembros inferiores.
c) Para Rehabilitación.
Los exoesqueletos activos para miembro superior pueden ser clasificados en [I.4]:
a) El segmento del miembro superior al que es aplicado (exoesqueleto para mano, exoesqueleto para antebrazo, exoesqueleto para brazo o exoesqueleto para segmentos combinados).
b) El número de grados de libertad (GDL).
c) El tipo de actuadores utilizados (motores eléctricos, músculos neumáticos, actuadores hidráulicos u otro tipo).
d) Los métodos de transmisión de potencia (engranes, bandas, mecanismos de unión u otro).
a) Tipo A.- Actuado por motores eléctricos.
b) Tipo B.- Actuado por músculos neumáticos.
c) Tipo C- Actuado por potencia hidráulica.
También existe una clasificación de acuerdo a donde se sujeta la base del exoesqueleto [I.12]:
a) No portátiles: las estructuras exoesqueléticas que se encuentran ancladas a una base fija, tal como el suelo, la pared o el techo. En general estas interfaces son más pesadas y complejas que los exoesqueletos portátiles. Debido a que suelen tener la capacidad de producir fuerzas de salida mayores. Además, la seguridad es especialmente importante en su diseño.
b) Portátiles: el soporte sobre el que se apoya todo el peso del exoesqueleto es el propio usuario o un dispositivo móvil con el usuario, como por ejemplo una silla de ruedas. De esta forma los exoesqueletos portátiles ejercen las fuerzas de reacción sobre el usuario en los puntos de sujeción.
Como se observa el resultado de la investigación realizada, hay varias clasificaciones existentes, por tal motivo, en la Figura I.4 se muestra un cuadro sinóptico de esa información.
I.3.- Rehabilitación
El concepto de Rehabilitación aparece por primera vez en Estados Unidos de América hacia finales de la primera guerra mundial para hacer frente a la reinserción profesional y al suministro de prótesis a los mutilados por la guerra; lo que originó que se diseñaran ejercicios físicos de Rehabilitación en los hospitales militares [I.13].
I.3.1.- Definición
Sistema de asistencia para labores de amplificación de la fuerza humana.
Dispositivo maestro para procesos de Teleoperación.
Extremidades o miembros superiores. Extremidades o miembros inferiores. Para Rehabilitación.
Segmento del miembro superior al que es aplicado.
El número de grados de libertad. El tipo de actuadores utilizados.
Los métodos de transmisión de potencia. La aplicación del el robot.
Lugar de sujeción de la base [I.12]
Portátil. No Portátil. Clasificación de los exoesqueletos Aplicación Final [I.7] Robots portátiles (Wearable Robots) [I.8] Segmentos del Cuerpo [I.9] Miembro Superior [I.10] Recuperaciones terapéuticas.
Dispositivo háptico para simulaciones virtuales.
Sección del cuerpo al que son aplicadas
[I.11]
Como tecnologías de asistencia para individuos con problemas de movilidad.
Ortópticos. Prostéticos. Extensores.
Para miembro superior. Para miembro inferior.
Actuadores utilizados para el diseño mecánico
[I.4] Motores Electricos. Musculos Neumaticos. Potencia hidráulica. Activos para miembro superior [I.4]
La Rehabilitación es un proceso de duración limitada y con un objetivo definido, encaminado a permitir que una persona con deficiencia alcance un nivel físico, mental y/o social funcional óptimo, proporcionándole así los medios de modificar su propia vida. Puede comprender medidas encaminadas a compensar la pérdida de una función o una limitación funcional (por ejemplo, ayudas técnicas) y otras medidas encaminadas a facilitar ajustes o reajustes sociales [I.15].
La Rehabilitación física se puede dividir principalmente en dos tipos:
Activa: El fisioterapeuta es el que origina el movimiento de la extremidad del paciente.
Pasiva: El paciente es el encargado de mover su extremidad.
I.3.2.- Antecedentes
No se tiene una fecha específica de cuando se puede establecer el inicio de la Rehabilitación ya que desde las primeras sociedades se presentan aspectos relacionados a este tema tal como se demuestra con un bajorrelieve hallado a la entrada de una tumba egipcia y que se considera la primera ilustración de una persona que utiliza un bastón para ayudarse a caminar. En 1764, ya existía un corsé similar al conocido actualmente como Milwaukee llamado máquina de Levacher (Figura I.5) [I.16].
Figura I.5.- Máquina de Levacher [I.16]
En 1946 se crea el Departamento de Medicina Física y Rehabilitación en el New York City’s
incluía los servicios de Hidroterapia, Mecanoterapia y Electroterapia. En 1957 el Dr.Tohen Zamudio, de México publica el libro “Medicina Física y Rehabilitación”, quizás el primero en
Latinoamérica. En la década de los 1960’s el Instituto Mexicano de Rehabilitación, Organismo no Gubernamental, inició el primer curso formal de especialistas en Medicina Física y Rehabilitación con tres años de duración y las escuelas de terapia física y ocupacional. Este Instituto fue de los primero en su época, en contar con taller de prótesis y órtesis [I.16].
I.3.3.- Rehabilitación en México
La medicina de Rehabilitación en México registró un mayor impulso a partir de la necesidad de atender a los niños afectados por las epidemias de poliomielitis. En 1951 el Hospital Infantil de México inició la capacitación de terapistas físicos y médicos, dando lugar a los primeros trabajos de investigación en Rehabilitación, de los que fueron pioneros los doctores Alfonso Tohen y Luis Guillermo Ibarra. Posteriormente, en 1952 fue fundado el Centro de Rehabilitación número 5 que se transformó en el Centro de Rehabilitación del Sistema Músculo Esquelético. Años más tarde, por decreto presidencial fechado en abril de 1976, este Centro de Rehabilitación fue transformado en el
Instituto Nacional de Medicina de Rehabilitación [I.15].
En el año 2000, existían en México 988 asociaciones de y para personas con discapacidad, de las cuales 871 estaban reconocidas oficialmente: 111 se registraron como instituciones de asistencia privada, 637 como asociaciones civiles, 40 como sociedades civiles y otras 83 con otro tipo de registro [I.15].
Esta información permite un acercamiento a las necesidades de atención de este grupo de población en cada región, entidad, municipio o localidad. En el año 2000, en el Distrito Federal se ubicaron 166 asociaciones, de y para personas con discapacidad, mientras que en Guerrero sólo se registraron seis. A nivel nacional existen 5.5 asociaciones de este tipo por cada 10 mil personas con discapacidad; en Baja California Sur esta tasa asciende a 29.3, mientras que en Guerrero es de 1.2 asociaciones por cada 10 mil personas con discapacidad [I.15].
Las primeras se refieren a la dificultad que enfrenta una persona para moverse, caminar, mantener algunas posturas, así como las limitaciones en habilidades manipulativas como agarrar o sostener objetos. Las neuromotrices son aquellas que dificultan la movilidad de algún segmento corporal a consecuencia de un daño neurológico, incluyendo las secuelas de traumatismos y de algunas enfermedades como la poliomielitis, las lesiones medulares y distrofia muscular [I.15].
La presencia de los diversos tipos de discapacidad guarda una estrecha relación con la edad, esto se puede observar en la Tabla I.1, donde se muestran los datos obtenidos en el censo realizado por el INEGI en el año 2000 [I.15].
Tabla I.1.- Porcentaje de población por grupos de edad según tipo de discapacidad, año 2000 [I.15]
Tipo de discapacidad
Grupos de Edad Motriz Auditiva Lenguaje Visual Mental
Total 45.3 15.7 4.9 26 16.1
Niños 35.1 12 10.3 15.1 33.9
Jóvenes 31.4 11.2 10.1 17.3 36.4
Adultos 43.2 12 4.7 28.7 15.7
Adultos mayores 55.1 21 1.4 30.5 3.7 Nota: La suma de los tipos de discapacidad puede ser mayor a cien debido a la población con
más de una discapacidad; el porcentaje se calculó en relación al total de personas con discapacidad en cada grupo de edad.
Tabla I.2.- Distribución porcentual de población por tipo de discapacidad según grupos de edad en el año 2000 [I.15]
Tipo de discapacidad
Grupos de Edad Motriz Auditiva Lenguaje Visual Mental
Total 100 100 100 100 100
Niños 10.2 10 27.8 7.6 27.6
Jóvenes 10.2 10.5 30.3 9.8 33.2
Adultos 28.4 22.8 28.6 33 29
Adultos mayores 50.5 55.5 12.2 48.7 9.4
No especificado 0.7 1.2 1.1 0.9 0.8
I.4.- Exoesqueletos desarrollados para miembro superior
El uso de robots en Rehabilitación tiene dos aplicaciones fundamentales [I.17]:
a) Durante movimientos activos del paciente, permiten almacenar información de la realización del movimiento (posición, velocidad, fuerza, entre otros), ayudando de esta forma a evaluar la evolución de la terapia sobre el paciente.
b) También pueden provocar movimientos pasivos o resistivos de la extremidad del paciente sujetada por el robot, sustituyendo en este caso al fisioterapeuta.
I.4.1.- Exoesqueleto de 4 GDL de la Universidad de Saga
Figura I.6.- Exoesqueleto de 4 GDL de la Universidad de Saga [I.18]
I.4.2.- CADEN-7: Exoesqueleto7 GDL
La naturaleza antropomórfica del diseño de las articulaciones combinado con la insignificante reacción de las 7 articulaciones reflectantes de fuerza se establece como la característica principal del CADEN-7. Utiliza una abertura de fijación hombre-robot tanto para segmentos superior e inferior del brazo, genera los movimientos de flexo-extensión, abducción-aducción y rotación interna-externa del hombro, extensión del codo, prono-supinación del antebrazo, flexo-extensión y desviación radio-ulnar del antebrazo (Figura I.7). La seguridad es implementada en 3 niveles: diseño mecánico, eléctrico y del programa de control [I.10].
I.4.3.- Exoesqueleto de 7 GDL “Soft-Actuaded”
El exoesqueleto de 7 GDL “Soft-Actuaded” es capaz de generar movimientos de flexo-extensión, abducción-aducción y rotación interna-externa del hombro, flexo-extensión del codo, prono-supinación del antebrazo, flexo-extensión y desviación radio-ulnar de la muñeca. La característica original es el uso de músculos neumáticos como un par antagonista (Figura 1.8); por lo tanto, el exoesqueleto provee la acción antagonista que es permitido por el control. Posee una masa ligera y una excelente proporción fuerza-peso. El musculo neumático al ser un actuador de una solo dirección de acción (contracción), 2 elementos opuestos se necesitan para la fuerza y movimiento bidireccional [I.19].
Figura I.8.- Exoesqueleto impulsado por músculos neumáticos [I.19].
I.4.4.- ARMin Robot
adicionalmente un sensor de fuerza/torque es colocado en la sección que soporta el antebrazo, además para complementar las mediciones, la palanca de la mano fue instrumentada con indicadores de esfuerzo, además de una apantalla donde el terapeuta indica la rutina a seguir (Figura I.9) [I.21]. La tercera versión cuenta con 6 GDL activos siendo 3 para el hombro, para la flexo-extensión del codo, prono-supinación del antebrazo y para flexo-extensión de la muñeca [I.22].
Figura I.9.- Demostración de cómo un terapeuta programa una rutina [I.21]
I.4.5.- MAHI
Nombrado así por las siglas en ingles del Laboratorio de Mecatrónica e Interfaces Hápticas (Mechatronics and Haptic Interfaces) de la Universidad RICE, es un dispositivo para Rehabilitación en ambientes virtuales en modo activa y pasivo [I.23]. Usa manipuladores robóticos que es su principal característica respecto a otros diseños y genera el movimiento de flexo-extensión en el codo, prono-supinación del antebrazo, flexo-extensión de la muñeca y desviación radio-ulnar. Está formado por una articulación de revolución en el codo, una articulación de revolución para la rotación del antebrazo y 3 articulaciones esférica-prismática-revolución en serie-paralelo para la muñeca (Figura I.10) [I.24].
I.4.6.- W-EXOS: Wrist Axes Offset (Desplazamiento de ejes de la muñeca)
Fue desarrollado para ayudar a los movimientos de prono-supinación del antebrazo, flexo-extensión de la muñeca y desviación radio-ulnar. Considera ejes de desplazamiento en la articulación de la muñeca; la interfaz mano-robot fue diseñada para no perturbar el movimiento de los dedos (Figura I.11). El diseño cuenta con dos tipos de seguridad: uno instalado en el diseño mecánico y otro instalado en el programa de control; topes mecánicos son colocados en la estructura mecánica para prevenir que cada movimiento exceda del rango permitido [I.25].
Figura I.11.- W-EXOS se mueve en los planos X, Y y Z [I.4]
I.4.7.- ASSIST: órtesis de soporte activo (Active Support Splint)
Figura I.12.- Estructura del ASSIST [I.26]
I.4.8.- Exoesqueleto para Movimientos de mano y dedos
Es un asistente para Rehabilitación del movimiento de la mano, cuenta con 18 GDL y un auto-control para el movimiento. Que permite que la mano lastimada del usuario sea manejada por la otra mano sana. Proporciona la fuerza adecuada de tal forma que la mano afectada pueda recuperar la capacidad al nivel de la mano funcional, puesto que fue diseñado para soportar los movimientos de flexo-extensión y abducción-aducción de los dedos y el pulgar independientemente así como oponerse al pulgar (Figura I.13). Además está diseñado para poderse combinar con un movimiento de la muñeca [I.27].
Figura I.13.- Mano de un sujeto colocado en el exosqueleto [I.27]
I.4.9.- NEUROexos: Exoesqueleto Neurorobótico (Neurobotics exoskeleton)
cinemática del hombro humano; está profundamente acoplado al usuario humano y el diseño está basado en un modelo humano en términos de biomecánica (Figura I.14). El hardware y el sistema de control están basados en modelos neuro-científicos que sintetizan los conocimientos de control motor y percepción así como de esquemas de acción [I.28].
Figura I.14.- Vista superior del prototipo de la articulación del hombro [I.28]
I.4.10.- Exoesqueleto para asistencia del movimiento del codo
El exoesqueleto es del tipo amplificador de fuerza del sistema muscular humano, con la característica de no perder el control natural de los movimientos, es por ello que los típicos controles de posición para las máquinas, no se pueden aplicar, pues cuando el humano proporciona el comando de referencia de posición se pierde la naturalidad de los movimientos; por lo cual se diseña un sistema de control de fuerza y no de posición angular del dispositivo donde el comando de fuerza lo da el operador humano (Figura I.15) [I.29].
Figura I.15.- Prototipo del sistema mecánico del exoesqueleto del brazo [I.29] Hombro
Mano
I.4.11.- Interacción háptica con ambiente virtual utilizando un exoesqueleto del brazo
En el artículo “Haptic interaction with virtual environment using an arm type exoskeleton device” se
presenta un exoesqueleto de 7 GDL mediante el cual el usuario humano puede interactuar con un ambiente virtual; la articulación del hombro es de tipo esférico lo que le da 3 GDL: aducción-abducción, elevación del hombro y el giro de la parte superior del brazo. El codo tiene 2 GDL: Flexo-extensión y giro del antebrazo. La muñeca posee los 2 GDL restantes y que son flexo-extensión y la abducción-aducción. El mecanismo de medición del movimiento del hombro y de la muñeca es dimensional. La estructura pesa en total 2.3 Kg [I.30].
I.4.12.- Exoesqueleto para movimientos de la mano
En el artículo “Arm movement experiments with joint space force fields using an exoskeleton robot”
se describe el diseño de exoesqueleto de 7 GDL, de poco peso, minimiza la inercia debido a la gravedad y de Coriolis de tal forma que los movimientos del brazo del usuario no son afectados. Las perturbaciones de torque pueden ser aplicadas individualmente a cualquiera o a todos los GDL, lo que propicio el desarrollo de un ambiente dinámico nuevo, para que los sujetos se puedan adaptar al sistema (Figura I.16). Miden la posición y el torque en cada articulación, a una tasa de muestreo de 960Hz, y calculan la velocidad y la aceleración a partir de posición [I.31].
Figura 1.16.- Demostración del funcionamiento del Sarcos Master [I.31]
I.4.13.- Exoesqueleto mecatrónicos para rehabilitación motora
libertad son abducción y aducción del hombro, flexión y extensión del hombro, rotación interna y externa del húmero, flexión y extensión del codo, pronación y supinación de la mano (Figura I.17). Realizaron diferentes simulaciones del comportamiento mecánico del brazo con el fin de obtener los torques máximas necesarias para mover cada articulación. Para la selección de los motores que mueven el exoesqueleto, analizaron la resistencia que puede ejercer el paciente al movimiento y el peso propio del prototipo. Determinaron que la velocidad máxima para el giro de cada articulación debía ser de 25º/s [I.32].
Figura I.17.- Usuaria con el dispositivo de rehabilitación motora [I.32]
I.4.14.- Exoesqueleto para la articulación del hombro
Figura I.18.- Modelo 3D del mecanismo propuesto para abducción lateral y frontal [I.33]
I.4.15.- IROS: Sistema Inteligente (Intelligent Rehabilitative Orthotic System)
Es un exoesqueleto que contiene 5 GDL, un sistema gráfico en tiempo real, un sistema de inteligencia. Cada GDL es manejado por un motor, 3 GDL son para el brazo y 2 para el antebrazo: orientación lateral del hombro, elevación del hombro, rotación interna-externa del húmero, flexo-extensión del codo, prono-supinación de la muñeca. Los sensores que ocupan son medidores de ángulo, velocidad, fuerza, torque y señales electromiografías. Maneja 4 modos de control: modo pasivo, de asistencia, de observación y de prueba [I.34].
I.4.16.- RUPERT: Robot asistente para terapia de rehabilitación de extremidad superior (Robotic assisted upper extremity repetitive therapy)
Es un exoesqueleto de 4 GDL, impulsado por músculos neumáticos, lo que le da la característica de ser ligero, fácil de usar, de bajo costo. Se han desarrollado 4 versiones hasta el año 2010, se puede observar las tres primeras versiones en la Figura I.19. La primera versión incluía 4 músculos neumáticos: elevación del hombro, extensión y supinación del codo y extensión de la muñeca después de considerar las condiciones funcionales de los pacientes; la estructura estaba restringida en la abducción del hombro a un solo plano (15° de forma lateral) y la máxima elevación estaba limitada a 45° además posee una plataforma que estabiliza la escápula. La segunda versión el centro de rotación y la longitud de cada segmento eran ajustables para acoplarse a las diferentes longitudes y constitución de cada paciente, sin embargo esta característica genera el inconveniente de aumentar
Polea de tiempo
Mecanismo Génova
el peso total y aumentar la demanda de energía, la articulación del hombro y del codo tienen mecanismos que incrementan la fuerza de momento de los músculos neumáticos como incrementos de elevación y extensión. La tercera versión fue desarrollada a partir de evaluaciones de las versiones anteriores (I y II) en el Centro Médico Regional “Banner Good Samaritan”; una
estructura hecha de un compósito de fibra de carbón fue desarrollada para hacer más ligero el robot pero conservando su rigidez; el mecanismo permite la flexión en el hombro de 15 a 85°, la flexión del codo de 0 a 125°, 45° en supinación a 45° en propinación, 60° en flexión a 30° extensión en la muñeca, así como torques de 15 NM para la articulación del hombro, 15 NM para el codo, 3 NM supinación y 15 NM para la muñeca [I.35]. La cuarta versión ya es de 5 GDL, aumentado la rotación humeral a los GDL anteriores, además de poseer un sistema control adaptativo en lazo cerrado para ayudar a los usuarios a realizar sus tareas tranquilamente en un ambiente 3D [I.36].
Figura I.19.- Evolución del exoesqueleto RUPERT. a) Versión I, b) Versión II y c) Versión III.
I.5.- Planteamiento del problema
En la revisión realizada para la elaboración del presente capítulo, se observa que el desarrollo de exosqueletos para Rehabilitación a nivel nacional es nulo y la difusión de los realizados no es la correcta, ya que no se encontró referencias donde se mencionan proyectos realizados en México. También es cierto que existen varios centros de Rehabilitación tanto gubernamentales como de la iniciativa privada, donde la Rehabilitación física es realizada en su mayoría por fisioterapeutas humanos que no siempre están en óptimas condiciones para proporcionar la terapia por diversos factores, principalmente agotamiento físico, lo que ocasiona que el avance del paciente no siempre
b) c)
mayor presencia en el país, siendo aproximadamente un tercio generada por enfermedades, tal es el que caso de la enfermedad cerebrovascular.
Por tal motivo, se propone realizar el diseño de la estructura mecánica de un exoesqueleto capaz de reproducir los movimientos realizados por el fisioterapeuta en las terapias de rehabilitación física, cuyas longitudes de los segmentos del miembro superior se ajuste a pacientes mexicanos.
I.6.- Sumario
En el presente capítulo se muestra una visión general de los temas que componen éste trabajo. Se inicia con la definición de los exoesqueletos, sus antecedentes generales y clasificación. Posteriormente, se aborda el tema de la Rehabilitación, para finalmente presentar un recuento de los exoesqueletos utilizados para la Rehabilitación de miembro superior. Dentro de la revisión de los dispositivos realizados con la finalidad de lograr una mejor Rehabilitación del miembro o extremidad superior de los seres humanos, mediante el diseño y desarrollo de exoesqueletos, se puede observar que muchos prototipos y sobre todos los desarrollados en fechas más recientes cuentan con 7 GDL para la región comprendida desde el hombro hasta la muñeca, esto mediante asignar 3 GDL al hombro y 2 a la muñeca, sin embargo en el codo algunos asignan 1 o 2 GDL al codo, quedando entonces que algunos no permiten movimiento originado por el antebrazo ya que lo asignan al codo; sin embargo también se observa que el desarrollo se ha llevado en etapas para ir añadiendo más GDL, o se ha trabajado por separado en diseños para cada parte del miembro superior y al final unirlas en un solo exoesqueleto. Además pocos artículos mencionan haber trabajado en conjunto con especialistas en Rehabilitación para obtener el diseño final de su exoesqueleto.
I.7.- Referencias.
1.- Tibaduiza, N., Chio, N. y Grosso, J. M., Simulación cinemática de un exoesqueleto de brazo, 2do Congreso Internacional de Ingeniería Mecatrónica - UNAB, pp 1-8, 2009.
2.- Arce, C., Órtesis de Miembros Superiores: Clasificación–Funciones–Prototipos–
Características– Indicaciones, pp 1-2, 2005.
4.- Gopura R. A. R. C. y Kiguchi K., Mechanical Designs of Active Upper-Limb Exoskeleton Robots State-of-the-Art and Design Difficulties, 2009 IEEE 11th International Conference on Rehabilitation Robotics, pp 178-187, 2009.
5.- Vukobratović, M., Humanoid Robotics –Past, Present State, Future–, SISY 2006 • 4th Serbian -Hungarian Joint Symposium on Intelligent Systems, pp 16-19, 2006.
6.- Mosher, R. S., From Handyman to Hardiman, SAE International, Vol. 76, pp. 588–597, 1967. 7.- Guizzo, E. y Goldstein, H., The rise of the Body Bots, IEEE Spectrum, Vol. 42, No. 10, pp
50-56, 2005.
8.- Veslin, E., Slama J. G., Dutra, S. M. y Lengerke O., Análisis Cinemático de un Exoesqueleto de Partes Superiores de 7 GDL, 2do Congreso Internacional de Ingeniería Mecatrónica – UNAB, pp 1-8, 2009.
9.- Kazerooni, H., The Berkeley lower extremity exoskeleton project, Experimental Robotics IX,
Springer Tracts in Advanced Robotics, Vol. 21, pp. 291-301, 2006.
10.- Perry J. C., Rosen, J. y Burns, S., Upper limb powered exoskeleton design, IEEE/ASME Transactions on Mechatronics, Vol. 12, No. 4, pp 408-417, 2007.
11.- Chávez-Cardona, M. A., Rodríguez-Spitia, F., Baradica-López, A., Exoesqueletos para potenciar las capacidades humanas y apoyar la rehabilitación, Revista Ingeniería Biomédica, Vol. 4, No. 7, pp. 63-73, 2010.
12.- Ruíz-Olaya, A. F., Sistema Robótico Multimodal para Análisis y Estudios en Biomecánica, Movimiento Humano y Control Neuromotor, Ph D Tesis, Universidad Carlos III de Madrid, pp 29-30, 2008.
13.- Juárez-Acosta, F., Holguín-Ávila, E. J. y Salamanca-Sanabria, A., Aceptación o rechazo: Perspectiva histórica sobre la discapacidad, la rehabilitación y la psicología de la rehabilitación,
Psicología y Salud, Vol. 16, No. 2, pp 187-197, 2006.
14.- Alvarado-Rocha, N.J. y Caceres-Quimbaya, F.M., Fortalecimiento de los Lazos Familiares de las Personas en Situación de Discapacidad del Hospital Simón Bolívar hacia el Proceso de Rehabilitación en la Clínica Fray Bartolomé de las Casas, B Sc Tesis, Corporación Universitaria Minuto de Dios, pp 26-30 , 2010.
15.- Instituto Nacional de Estadística, Geografía e Informática, Las personas con discapacidad en México: una visión censal, pp 1-30, 2004.
17.- Sabater, J. M., Azorín, J. M., Pérez, C., García, N., y Menchón, M., Ayuda robótica para la rehabilitación de miembros superiores, 2do Congreso Internacional sobre Domótica, Robótica y Teleasistencia para Todos, DRT4all 2007, pp. 19-28, 2007.
18.- Kiguchi, K., Active exoskeletons for upper-limb motion assist, International Journal Humanoid Robotics, Vol. 4, No. 3, pp. 607-624, 2007.
19.- Tsagarakis N. G. y Caldwell D. G., Development and control of a ‘soft-actuated’ exoskeleton
for use in physiotherapy and training, Autonomous Robots, Vol. 15, No. 1, pp. 21-33, 2003. 20.- Nef, T., Mihelj, M., Colombo, G., y Riener R., ARMin-Robot for rehabilitation of the upper
extremities, 2006 IEEE International Conference on Robotics and Automation, pp. 3152-3157, 2006.
21.- Mihelj, M., Nef, T. y Riener, R., ARMin II–7 DoF rehabilitation robot: mechanics and kinematics, 2007 IEEE International Conference on Robotics and Automation, pp 4120-4125, 2007.
22.- Brokaw, E. B., Nichols, D., Holley, R. J., Murray, T. M., Nef, T., y Lum, P. S., Time independent functional task training: a case study on the effect of inter-joint coordination driven haptic guidance in stroke therapy, 2011 IEEE International Conference on Rehabilitation Robotics, pp 1-6, 2011.
23.- Sledd, A. y O'Malley, M. K., Performance enhancement of a haptic arm exoskeleton, 2006 14th Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems, pp 375- 381, 2006.
24.- Gupta, A. y O’Malley, M. K., Design of a haptic arm exoskeleton for training and
rehabilitation, IEEE/ASME Transactions Mechatronics, Vol. 11, No.3, pp. 280–289, 2006. 25.- Gopura, R.A.R.C. y Kiguchi, K., Development of a 6DoF exoskeleton robot for human
upper-limb motion assist, 4th International Conference on Information and Automation for Sustainability, 2008. ICIAFS 2008., pp13-18, 2008.
26.- Sasaki, D., Noritsugu, T., y Takaiwa, M., Development of active support splint driven by pneumatic soft actuator (ASSIST), IEEE International Conference on Robotics and Automation, pp. 520-525, 2004.
27.- Kawasaki, H., Ito, S., Ishigure Y., Nishimoto, Y., Aoki, T., Mouri, T., Sakaeda, H. y Abe, M., Development of a hand motion assist robot for rehabilitation therapy by patient self-motion control, IEEE 10th International Conference on Rehabilitation Robotics, pp. 234-240, 2007. 28.- Sardellitti, I., Cattin, E., Roccella, S., Vecchi, F., Carrozza, M. C., Dario, P., Artemiadis, P. K. y
joint-first link robot for neurorobotic applications, The First IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics, pp. 112-117, 2006.
29.- Molina, J.E., González, J.P., Desarrollo de un sistema de control de un exoesqueleto para asistencia del movimiento del codo, Scientia et Technica, Año XIV, No. 39, pp. 129-134, 2008. 30.- Chou, W., Wang, T. y Xiao, J., Haptic interaction with virtual environment using an arm type
exoskeleton device, 2004 IEEE International Conference on Robotics and Automation, pp 1992-1997, 2004.
31.- Mistry M., Mohajerian P. y Schaal, S., Arm movement experiments with joint space force fields using an exoskeleton robot, 9th International Conference on Rehabilitation Robotics, pp 408-413, 2005.
32.- Gutiérrez, R., Niño-Suarez, P. A., Avilés-Sánchez, O. F., Vanegas, F. y Duque, J., Exoesqueleto mecatrónico para rehabilitación motora, 8vo Congreso Iberoamericano de Ingeniería Mecánica, pp 1-9, 2007.
33.- Papadopoulos, E. y Patsianis, G., Design of an exoskeleton mechanism for the shoulder joint,
12th IFToMM World Congress, pp 1-6, 2007.
34.- Lee, S., Agah, A., y Bekey, G., IROS: an intelligent rehabilitative orthotic system for cerebrovascular accident, IEEE International Conference on Systems, Man and Cybernetics, pp. 815-819, 1990.
35.- Sugar T. G., He, J., Koeneman, E. J., Koeneman, J. B., Herman, R., Huang, H., Schultz, R. S., Herring, D. E., Wanberg, J., Balasubramanian, S., Swenson, P. y Ward, J. A, Design and control of RUPERT: a device for robotic upper extremity repetitive therapy, IEEE Transactions on Neural Systems And Rehabilitation Engineering, Vol. 15, No. 3, pp 336-346, 2007.
Capítulo II.-
Marco teórico
II.1.- Introducción
Uno de los aspectos primordiales de los robots de rehabilitación es que el ser humano en el ciclo sólo es el paciente y a diferencia de lo sistemas quirúrgicos y radiológicos, tales como Da Vinci y
CyberKnife, donde un paciente está siendo “operado” por el robot, sin embargo, un médico dirige al robot; con un robot de rehabilitación se pueden introducir criterios de seguridad adicionales por encima de los utilizados robots de aplicaciones médicas más utilizados [II.1].
II.2.- Procedimientos de rehabilitación.
Las enfermedades cerebrovasculares (ECV) constituye un problema de salud mundial con tendencia creciente. Según datos de la Organización Mundial de la Salud (OMS), la EVC es una importante causa de discapacidad y afectación de calidad de vida, su espectro de afectaciones es muy amplio. Además de las limitaciones físicas, se asocia a problemas en la esfera emocional con alta frecuencia de depresión (> 50%); y/o deterioro cognitivo de diverso grado (35%), siendo la segunda causa más frecuente de demencia [II.2].
Las secuelas por ECV pueden ser sensitivas o motoras, siendo estas últimas sin lugar a dudas las que mayor grado de invalidez representan; entre los pacientes mexicanos que presentan secuelas motoras se encontró que el 81% de los hemipléjicos sufren alguna complicación, entre las más frecuentes se encuentran depresión, hombro doloroso, epilepsia y contracturas osteoarticulares, de éstas las más relacionadas con la lesión topográfica son la epilepsia, encontrada en pacientes con lesión en el hemisferio cerebral izquierdo y la depresión, relacionada con lesiones en el hemisferio cerebral derecho [II.3].
La Rehabilitación del paciente adulto con Enfermedad Vascular Cerebral es un proceso limitado en el tiempo y orientado por objetivos, dirigido a lograr un nivel funcional, físico y social óptimo para facilitar su independencia y la reintegración al entorno familiar, social y laboral [II.4].
La enfermedad vascular cerebral puede afectar a diferentes áreas funcionales que limitan la actividad y la participación de quien lo ha padecido [II.4].
Mecánica
Estática Dinámica
Cinética Cinemática
En los pacientes con secuelas de EVC la dosis óptima de ejercicio terapéutico se tiene que valorar individualmente según las necesidades y las limitaciones.
Se recomienda una frecuencia de ejercicio de 3 a 7 días por semana, con una duración de 20-60 min/día de ejercicio continuo o acumulado (turnos de = ≥10 min) según la condición física.
Otros especialistas indican que los ejercicios se tiene que realizas en sesiones de 3 series con 10 repeticiones por cada una.
II.3.- Mecánica del manipulador
La mecánica es la rama ocupada del estudio de los movimientos, tiempo y fuerzas, dividida en estática y dinámica (Figura II.1), esta última referida al comportamiento de los sistemas con respecto al tiempo [II.5].
Figura II.1.- Diagrama de estudio de la mecánica [II.6]
II.3.1.- Grados de libertad y tipos de articulaciones.
Los grados de libertad (GDL) se refieren a los movimientos independientes que puede tener un cuerpo, siendo 6 el número máximo considerando que se encuentra en el espacio sin ningún tipo de restricción y contacto, siendo 3 de rotación y 3 de traslación.
Mecánicamente un robot o manipulador está formado por eslabones unidos mediante articulaciones que permiten un movimiento relativo entre cada dos eslabones consecutivos; el movimiento de las articulaciones puede ser de desplazamiento, de giro o una combinación de ambos, existiendo así seis posibles tipos de articulaciones que se muestran en la Figura II.2 [II.7]
Esférica o rótula (3 GDL) Planar (2 GDL) Tornillo (1 GDL) Prismática (1 GDL) Rotación (1 GDL) Cilíndrica (2 GDL)
Figura II.2.- Articulaciones posible en un robot o mecanismo [II.7]
Los GDL del manipulador está dado por la suma de los grados de libertad de las articulaciones que lo componen, normalmente el número de eslabones es igual a número de GDL, aunque existen excepciones [II.7].
II.3.2.- Cinemática del manipulador
La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. Así, la cinemática se interesa por la descripción analítica del movimiento espacial del robot como una función del tiempo, y en particular por las relaciones entre la posición y la orientación del extremo final del robot con los valore que toman sus coordenadas articulares [II.7].
Existen dos problemas fundamentales para resolver la cinemática del robot [II.7]:
Problema cinemático inverso.- Resuelve la configuración que debe adoptar el robot para una posición y orientación del extremo conocido.
Por otra parte, la dinámica trata con la formulación de las ecuaciones de movimiento; las ecuaciones dinámicas para un manipulador son un conjunto de expresiones matemáticas que describen su conducta y tales ecuaciones son útiles para la simulación del sistema [II.6].
Un eslabón puede ser considerado como un cuerpo rígido, el cual puede ser descrito por dos parámetros, la longitud del eslabón y el giro del eslabón. Estos parámetros definen la localización relativa de los ejes de articulaciones vecinas en el espacio [II.8].
Asimismo, las articulaciones pueden ser descritas también por dos parámetros, el descentramiento del eslabón, que es la distancia de un eslabón a otro próximo, a lo largo del eje de la articulación; y el ángulo de la articulación, que es la rotación de un eslabón con respecto al próximo, alrededor del eje de la articulación [II.8].
A cada eslabón se le asocia un sistema de referencia solidario a él y, utilizando las transformaciones homogéneas, es posible representar las rotaciones y traslaciones relativas entre los distintos eslabones que componen el robot. Normalmente, la matriz de transformación homogénea que representa la posición y orientación relativa entre los sistemas asociados a dos eslabones consecutivos del robot se suele denominar matriz i-1Ai. Denominado 0Ak a las matrices resultantes del producto de matrices i-1Ai con i desde 1 hasta k, se puede representar de forma total o parcial la cadena cinemática que forma el robot. (II.7)
La representación de Denavit-Hartenberg de un cuerpo rígido depende entonces, de cuatro parámetros geométricos asociados a cada elemento, estos describen completamente la relación espacial entre sistemas de coordenadas. Estos parámetros pueden resumirse como (Figura II.3):
Longitud del eslabón ai: distancia desde el origen del sistema de coordenadas i hasta la intersección de los ejes xi y zi−1, a lo largo del eje xi.
Zi-1 Xi Xi-1 Θi Zi-1 Xi Zi α1 Zi-1 Yi-1 Xi-1 Yi Xi Zi ai di
Descentramiento del eslabón di: distancia desde el origen del sistema de coordenadas i
−1 hasta la intersección de los ejes xi y zi−1, a lo largo del eje zi−1.
Ángulo de la articulación θi: ángulo de la articulación del eje xi−1 al eje xi respecto al eje zi−1.
De esta forma, para una articulación de revolución, di, ai y αi son los parámetros de la articulación y
permanecen constantes, mientras que θi es la variable de la articulación. Para una articulación prismática, la variable será di.
Figura II.3.- Parámetros de Denavit-Hartenberg
II.1
Siendo la representación en matrices la Ecuación II.2.
[ ] [ ] [ ] [ ] II.2
El producto matricial da por resultado una matriz 4x4 (Ecuación II.3) que da la orientación y posición del eslabón siguiente respecto al anterior, llegando a obtener los parámetros del último eslabón respecto al primero.
[ ] II.3 Donde:
C es la función trigonométrica coseno del ángulo.
S es la función trigonométrica seno del ángulo.
θi, αi, di, ai, son los parámetros del eslabón i.
De este modo, basta con identificar los parámetros θi, αi, di, ai, para obtener matrices A y relacionar así todos y cada uno de los eslabones del robot. Como se ha indicado, para que la matriz, relacione los sistemas (Si) y (Si-1), es necesario que los sistemas se hayan escogido de acuerdo a unas determinadas normas. Estas, junto con la definición de los 4 parámetros de Denavit-Hartenberg, conforman el siguiente algoritmo para la resolución del problema cinemático directo [Tabla II.1]:
Tabla II.1.- Parámetros de Denavit-Hartenberg [II.9]
![Figura I.2.- Primer exoesqueleto activo creado en 1969 en el Instituto Mihailo Pupin [I.5]](https://thumb-us.123doks.com/thumbv2/123dok_es/5005369.77258/21.612.232.399.412.609/figura-primer-exoesqueleto-activo-creado-instituto-mihailo-pupin.webp)
![Figura III.3.- Representación de los 3 GDL del hombro [III.15]](https://thumb-us.123doks.com/thumbv2/123dok_es/5005369.77258/77.612.244.415.57.383/figura-iii-representacion-gdl-hombro-iii.webp)
![Figura III.4.- Flexo-extensión y aducción del hombro [III.15]](https://thumb-us.123doks.com/thumbv2/123dok_es/5005369.77258/78.612.145.468.406.726/figura-iii-flexo-extension-aduccion-hombro-iii.webp)
![Figura III.5.- Movimiento de abducción del hombro [III.15]](https://thumb-us.123doks.com/thumbv2/123dok_es/5005369.77258/80.612.212.460.54.408/figura-iii-movimiento-abduccion-hombro-iii.webp)
![Figura III.6.- Etapas del movimiento flexoextensión horizontal [III.15].](https://thumb-us.123doks.com/thumbv2/123dok_es/5005369.77258/82.612.187.498.61.399/figura-iii-etapas-movimiento-flexoextension-horizontal-iii.webp)
![Figura III.7.- Movimiento de circundicción en el hombro [III.15]](https://thumb-us.123doks.com/thumbv2/123dok_es/5005369.77258/83.612.161.462.222.569/figura-iii-movimiento-circundiccion-hombro-iii.webp)
![Figura III.8.- La amplitud de los movimientos del codo [III.15]](https://thumb-us.123doks.com/thumbv2/123dok_es/5005369.77258/86.612.184.480.217.604/figura-iii-amplitud-movimientos-codo-iii.webp)
![Figura III.9.- Flexo-extensión del codo [III.15]](https://thumb-us.123doks.com/thumbv2/123dok_es/5005369.77258/88.612.117.529.94.532/figura-iii-flexo-extension-del-codo-iii.webp)