Estudio de aplicación del m e f a la distribución tensional en placas
92
0
0
Texto completo
(2) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. PRESENTACIÓN. SEÑOR DECANO DE LA FACULTAD DE INGENIERIA.. SEÑORES MIEMBROS DEL JURADO: De conformidad con lo estipulado por el Reglamento de Grados y Títulos de la Escuela Profesional de Ingeniería Mecánica de la Universidad Nacional de Trujillo, presento a su consideración la presente tesis: "ESTUDIO DE APLICACION DEL M.E.F. A LA DISTRIBUSION TENSIONAL EN PLACAS" El presente estudio tuvo como finalidad elaborar una metodología para escribir código y poder hallar valores propios y compáralos con los valores teóricos, El código esta íntegramente escrito en el lenguaje de Programación FORTRAN.. Trujillo, Octubre del 2019. i Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(3) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. DEDICATORIA. Esta tesis está dedicada a:. ejemplo de esfuerzo y valentía, de no temer las adversidades porque Dios está conmigo siempre. A mis hermanas Lucero, Kiara y Rosita por su cariño y apoyo incondicional, durante todo este proceso, por estar conmigo en todo momento gracias. A toda mi familia porque con sus oraciones, consejos y palabras de aliento hicieron de mi una mejor persona y de una u otra forma me acompañan en todos mis sueños y metas. Finalmente quiero dedicar esta tesis a mi novia y futura esposa Karen necesito, por extender su mano en momentos difíciles y por el amor brindado cada día, de verdad mil gracias amor mío.. ii Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(4) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. AGRADECIMIENTOS Quiero expresar mi gratitud a Dios, quien con su bendición llena siempre mi vida y a toda mi familia por estar siempre presentes.. De igual manera mis agradecimientos a la Universidad Nacional de Trujillo, a toda la Escuela de Ingeniería Mecánica, a mis profesores quienes con la enseñanza de sus valiosos conocimientos hicieron que pueda crecer día a día como profesional.. iii Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(5) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. ÍNDICE ANALÍTICO. PRESENTACIÓN ................................................................................................ i DEDICATORIA .................................................................................................... ii AGRADECIMIENTOS ........................................................................................ iii ÍNDICE ANALÍTICO ........................................................................................... iv LISTA DE FIGURAS .......................................................................................... v RESUMEN ........................................................................................................ vii. 1. INTRODUCCIÓN. ........................................................................................ 1 1.1. Realidad Problemática. ......................................................................... 1. 1.2. Enunciado del problema........................................................................ 1. 1.3. Hipótesis ............................................................................................... 1. 1.4. Justificación........................................................................................... 2. 1.4.1. Justificación Técnica....................................................................... 2. 1.4.2. Justificación Económica ................................................................. 2. 1.5. 2. OBJETIVOS .......................................................................................... 2. 1.5.1. Objetivo General ............................................................................. 2. 1.5.2. Objetivos Específicos ..................................................................... 2. FUNDAMENTOS TEÓRICOS. .................................................................... 3 2.1. Introducción ........................................................................................... 3. 2.2. Antecedentes y marco teórico ............................................................... 4. 2.3. Concepción del método de elemento finito ........................................... 7. 2.3.1 3. 4. Procedimiento general .................................................................. 10. MATERIALES Y MÉTODOS ...................................................................... 70 3.1. Material de estudio .............................................................................. 70. 3.2. Procedimiento de Formulación del Elemento Finito Bidimensional ..... 70. 3.3. Lenguaje de programación FORTRAN ............................................... 73. 3.4. Elemento finito triangular..................................................................... 75. RESULTADOS Y DISCUSIÓN .................................................................. 80 4.1. Resultados .......................................................................................... 80. 5. CONCLUSIONES ...................................................................................... 81. 6. RECOMENDACIONES .............................................................................. 81. 7. REFERENCIAS BIBLIOGRAFICAS .......................................................... 82. iv Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(6) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. LISTA DE FIGURAS Figura 1 Dominio de definición de variable de campo θ(x, y) ................................ 7 Figura 2 El elemento finito con sus nodos ................................................................. 8 Figura 3 Empieza la discretización del dominio ........................................................ 9 Figura 4 Se puede apreciar cómo se lleva a cabo la refinación de la malla. ....... 9 Figura 5 Deformaciones en un elemento finito ....................................................... 12 Figura 6 Fuerzas sobre un elemento ........................................................................ 17 Figura 7 Fuerzas de conexión entre elementos ..................................................... 18 Figura 8 Fuerzas nodales equivalentes a las de volumen .................................... 19 Figura 9 Interpolación de deformaciones................................................................. 22 Figura 10 Funciones de interpolación del elemento triangular............................. 28 Figura 11 Coordenadas de área ............................................................................... 32 Figura 12 Valores constantes de la coordenada de área L1 ................................ 32 Figura 13 Elemento de tres nudos ............................................................................ 32 Figura 14 Elemento de seis nudos y función de interpolación del nudo 2 ......... 33 Figura 15 Corrección de nudo esquina .................................................................... 33 Figura 16 Elemento triangular de diez nudos ......................................................... 34 Figura 17 Corrección de nudos esquina .................................................................. 34 Figura 18 Placa plana a flexión ................................................................................. 41 Figura 19 Deformaciones en el plano medio de una placa................................... 43 Figura 20 Deformaciones interiores en una placa .................................................. 44 Figura 21 Deformaciones unitarias en una placa. Teoría clásica ........................ 46 Figura 22 Estado de tensiones en una placa .......................................................... 47 Figura 23 Esfuerzos de flexión en una placa .......................................................... 49. v Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(7) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. Figura 24 Esfuerzos cortantes y de torsión en una placa ..................................... 49 Figura 25 Equilibrio de un elemento diferencial de placa ..................................... 51 Figura 26 Placa rectangular ....................................................................................... 56 Figura 27 Esfuerzos sobre el lado de una placa. ................................................... 59 Figura 28 Normal y tangente a un lado curvo ......................................................... 60 Figura 2929 Fuerzas en las esquinas debidas al momento torsor.................... 61 Figura 30 Elemento placa rectangular ..................................................................... 61 Figura 31 Grados de libertad del elemento rectangular ........................................ 62 Figura 32 Deformación de la frontera entre dos elementos placa ....................... 65 Figura 33 Incompatibilidad del giro normal a la frontera entre 2 elementos placa ........................................................................................................................................ 66 Figura 34 Continuidad de giros en la frontera entre dos elementos placa ......... 66 Figura 35 Elemento rectangular hermítico............................................................... 69 Figura 36 Elementos triangulares compatibles ....................................................... 69 Figura 37 Organigrama del análisis de una estructura por el método de elementos finitos. ......................................................................................................... 73 Figura 38 Coordenadas de área para triángulos. ................................................... 76 Figura 39 Elemento triangular lineal, cuadrático y cúbico..................................... 79 Figura 40 Se puede Apreciar la simulación de la placa. ....................................... 80. vi Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(8) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. RESUMEN. En el presente Trabajo se estudia cómo aplicar el método de los elementos finitos a una placa para obtener las deformaciones y los esfuerzos respectivos que actúan en dicha placa cuando actúa sobre esta una carga dada. Para realizar este trabajo se ha hecho una descripción pormenorizada de toda a teoría del elemento finito poniendo énfasis principalmente sobre el enfoque bidimensional ya que este es el objeto de estudio y así poder elegir el procedimiento más adecuado. Así mismo se muestra los principales tipos de elementos usados. El código fue escrito en Formula Translation y para nuestro caso solo contempla el análisis de una placa simple con carga. Los resultados difieren muy poco de aquellos que se obtendrían utilizando paquetería de software comercial del mercado. Este es un primer análisis que deberá ser complementado con otros estudios .. Palabras Claves: Distribución tensional en placas. vii Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(9) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. 1. INTRODUCCIÓN.. 1.1. Realidad Problemática.. En el campo del Diseño es fundamental conocer los valores de los esfuerzos producidos por las cargas que actúan en los diferentes puntos de una estructura. En la actualidad este campo se ha desarrollado en forma exponencial y con el advenimiento de la computadora y el desarrollo de métodos de análisis numérico, en el mercado han salido una serie innumerable de paquetes informáticos que sirven de gran ayuda, unos con mayor precisión y versatilidad sobre otros. Desde los primeros métodos de cálculo, pasando por los métodos matriciales, métodos de elementos finitos, y elementos de contorno hemos mejorado muchísimo el cálculo de las tensiones en cuerpos de geometrías complejas. En ese sentido en la actualidad es muy fácil para el Estudiante de Ingeniería o el mismo Ingeniero realizar una estimación tensional de una estructura. Pero que hay detrás de estos softwares que se venden a un precio bastante alto, existe muchísima programación que simplifica al máximo el cálculo, pero nosotros no vemos esa programación sino simplemente los resultados e interpretamos dichos resultados, dados por la caja mágica (el ordenador). El presente trabajo trata de mostrar de manera muy simple a manera didáctica como podemos realizar dicha programación y entender los principios generales en los cuales se basan estos extensos códigos de programación que se usan en la actualidad. 1.2. Enunciado del problema. "COMO APLICAR EL M.E.F. A LA DISTRIBUSION TENSIONAL EN PLACAS" 1.3. Hipótesis. IMPLEMENTANDO EL M.E.F.. A TRAVEZ DE CODIGO ESCRITO EN. LENGUAJE FORTRAN. 1 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(10) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. 1.4. Justificación. 1.4.1 Justificación Técnica Podremos dar los primeros pasos hacia la creación de código propio para luego poder desarrollar programas propios. 1.4.2 Justificación Económica El código permitirá analizar placas muy rápidamente eliminando así un tiempo perdido debido a la lentitud que se tiene cuando se evalúa analíticamente mediante procedimientos engorrosos. 1.5. OBJETIVOS. 1.5.1 Objetivo General . Desarrollar un programa propio en Lenguaje FORTRAN que analice las. placas sometidas a Tensión.. 1.5.2 Objetivos Específicos Escribir en fortran código propio para solucionar el problema planteado. Determinar el tipo de elemento masa adecuado para nuestra simulación. Determinar Las tensiones que se producen en el interior de la placa. Determinar Las deformaciones que se producen en el interior de la placa. Determinar Los desplazamientos que se producen en el interior de la placa. Comparar nuestros resultados con softwares comerciales.. 2 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(11) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. 2. 2.1. FUNDAMENTOS TEÓRICOS.. Introducción. El método de los elementos finitos (MEF en castellano o FEM en inglés) es un método numérico general para la aproximación de soluciones de ecuaciones diferenciales parciales muy complejas utilizado en diversos problemas de ingeniería y física. El MEF está pensado para ser usado en computadoras y permite resolver ecuaciones diferenciales asociadas a un problema físico sobre geometrías complicadas. El MEF se usa en el diseño y mejora de productos y aplicaciones industriales, así como en la simulación de sistemas físicos y biológicos complejos. La variedad de problemas a los que puede aplicarse ha crecido enormemente, siendo el requisito básico que las ecuaciones constitutivas y ecuaciones de evolución temporal del problema sean conocidas de antemano. El MEF permite obtener una solución numérica aproximada sobre un cuerpo, estructura o dominio (medio continuo) —sobre el que están definidas ciertas ecuaciones diferenciales en forma débil o integral que caracterizan el comportamiento físico del problema— dividiéndolo en un número elevado de subdominios no-intersectantes entre sí denominados «elementos finitos». El conjunto de elementos finitos forma una partición del dominio también denominada discretización. Dentro de cada elemento se distinguen una serie de puntos representativos llamados «nodos». Dos nodos son adyacentes si pertenecen al mismo elemento finito; además, un nodo sobre la frontera de un elemento finito puede pertenecer a varios elementos. El conjunto de nodos considerando sus relaciones de adyacencia se llama «malla». Los cálculos se realizan sobre una malla de puntos (llamados nodos), que sirven a su vez de base para discretización del dominio en elementos finitos. La generación de la malla se realiza usualmente con programas especiales llamados generadores de mallas, en una etapa previa a los cálculos que se denomina pre-proceso. De acuerdo con estas relaciones de adyacencia o conectividad se relaciona el valor de un conjunto de variables incógnitas. 3 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(12) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. definidas en cada nodo y denominadas grados de libertad. El conjunto de relaciones entre el valor de una determinada variable entre los nodos se puede escribir en forma de sistema de ecuaciones lineales (o linealizadas). La matriz de dicho sistema de ecuaciones se llama matriz de rigidez del sistema. El número de ecuaciones de dicho sistema es proporcional al número de nodos. Típicamente. el. análisis. computacionalmente. para. de. los. calcular. elementos el. campo. finitos de. se. programa. desplazamientos. y,. posteriormente, a través de relaciones cinemáticas y constitutivas las deformaciones y tensiones respectivamente, cuando se trata de un problema de mecánica de sólidos deformables o más generalmente un problema de mecánica de medios continuos. El método de los elementos finitos es muy usado debido a su generalidad y a la facilidad de introducir dominios de cálculo complejos (en dos o tres dimensiones). Además el método es fácilmente adaptable a problemas de transmisión de calor, de mecánica de fluidos para calcular. campos. de. velocidades. y. presiones. (mecánica. de. fluidos. computacional, CFD) o de campo electromagnético. Dada la imposibilidad práctica de encontrar la solución analítica de estos problemas, con frecuencia en la práctica ingenieril los métodos numéricos y, en particular, los elementos finitos, se convierten en la única alternativa práctica de cálculo. Una importante propiedad del método es la convergencia; si se consideran particiones de elementos finitos sucesivamente más finas, la solución numérica calculada converge rápidamente hacia la solución exacta del sistema de ecuaciones. 2.2. Antecedentes y marco teórico. El MEF fue al principio desarrollado en 1943 por Richard Courant, quien utilizó el método de Ritz de análisis numérico y minimización de las variables de cálculo para obtener soluciones aproximadas a un sistema de vibración. Poco después, un documento publicado en 1956 por M. J. Turner, R. W. Clough, H. C. Martin, y L. J. Topp estableció una definición más amplia del análisis numérico.1 El documento se centró en ―la rigidez y deformación de estructuras complejas‖. Con la llegada de los primeros ordenadores instaura el cálculo 4 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(13) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. matricial de estructuras. Éste parte de la discretización de la estructura en elementos lineales tipo barra de los que se conoce su rigidez frente a los desplazamientos de sus nodos. Se plantea entonces un sistema de ecuaciones resultado de aplicar las ecuaciones de equilibrio a los nodos de la estructura. Este sistema de ecuaciones se esquematiza de la siguiente manera: f=Ku Donde las incógnitas son los desplazamientos en los nodos (vector u) que se hallan a partir de las "fuerzas" o "solicitaciones" en los nodos (vector f) y de la rigidez de las barras (matriz de rigidez K). Conocidos dichos desplazamientos es posible determinar los esfuerzos en las barras. La solución obtenida es exacta. Cuando se produce la llegada de los primeros equipos de cómputo en la década de 1950, el cálculo de estructuras se encontraba en un punto en el que los métodos de cálculo predominantes consistían en método iterativos (métodos de Cross y Kani) que se realizaban de manera manual y, por tanto, resultaban bastante tediosos. El cálculo de una estructura de edificación de varios pisos, por ejemplo, podía llevar varias semanas, lo cual suponía un coste sustancial de tiempo en detrimento de la posibilidad de invertir este en la optimización de la estructura. La llegada de la computadora permitió el resurgimiento del método de los desplazamientos ya conocidos en siglos anteriores (Navier, Lagrange, Cauchy), pero que eran difíciles de aplicar dado que al final conducían a la resolución de enormes sistemas de ecuaciones inabordables desde el punto de vista manual. Cuando las aplicaciones prácticas de elementos finitos crecieron en tamaño, los requerimientos de tiempo de cálculo y memoria de los ordenadores crecieron. En ese punto el desarrollo de algoritmos más eficientes se volvió importante. Para la resolución de los sistemas de ecuaciones se potencia el estudio de la adaptabilidad de los algoritmos ya conocidos (Gauss, Cholesky, Crout, Gradiente conjugado, etc.). El ahorro de tiempo es impensable y con ello el uso del método matricial se extiende. Este desarrollo se hace especialmente 5 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(14) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. notable en estructuras de edificación donde la discretización de los pórticos en barras, es prácticamente inmediata a partir de las vigas y los pilares. Sin embargo, y a pesar de desarrollarse modelizaciones de elementos superficiales mediante barras (losas con emparrillados, elementos curvos mediante aproximaciones de elementos rectos, etc.), se plantean grandes dificultades ante estructuras continuas (superficies y volúmenes) y con geometrías complejas. De ahí que sea precisamente dentro del campo aeroespacial donde comiencen a desarrollarse las nuevas técnicas del MEF. Dada su generalidad el método se amplió a otros campos no estructurales como la conducción de calor, la mecánica de fluidos, etc. donde compitió con otros métodos numéricos como el de método de las diferencias finitas que aun siendo más intuitivos, tenían de nuevo dificultades de planteamiento para geometrías complejas. Con la llegada de los centros de cálculo y los primeros programas comerciales en los años 60, el MEF a la vez que se populariza en la industria refuerza sus bases teóricas en los centros universitarios. En los años 70 se produce un gran crecimiento de la bibliografía, así como la extensión del método a otros problemas como los no lineales. En esta década, el MEF estaba limitado a caros ordenadores centrales generalmente poseído por las industrias aeronáuticas, de automoción, de defensa y nucleares. Se estudian nuevos tipos de elementos y se sientan las bases matemáticas rigurosas del método, que había aparecido antes más como técnica de la ingeniería que como método numérico de la matemática. Por último, a partir de la década de los 80, con la generalización de los ordenadores personales, se extiende el uso de los programas comerciales que se especializan en los diversos campos, instaurándose el uso de pre y postprocesadores gráficos que realizan el mallado y la representación gráfica de los resultados. Se continúa en el estudio de la aplicación del método a nuevos modelos de comportamiento (plasticidad, fractura, daño continuo, etc.) y en el análisis de los errores.. 6 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(15) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. En la actualidad, dentro del campo estructural, el MEF comparte protagonismo con el método matricial, siendo muchos los programas que mezclan el análisis por ambos métodos, debido sobre todo a la mayor necesidad de memoria que requiere el análisis por elementos finitos. Así se ha dejado la aplicación del MEF para el análisis de elementos continuos tipo losa o pantalla, mientras que los pórticos siguen todavía discretizándose en barras y utilizando el método matricial. Y desde el rápido declive en el coste de los ordenadores y el fenomenal incremento en la potencia de cálculo, el MEF ha desarrollado una increíble precisión. A día de hoy, los superordenadores son capaces de dar resultados exactos para todo tipo de parámetros. 2.3. Concepción del método de elemento finito. En la figura N°2.1 que presentamos a continuación se muestra el volumen de un material el cual posee propiedades físicas que nosotros conocemos. El volumen representa el dominio de nuestro problema, en este punto nos vamos a concentrarnos en un problema bidimensional ya que estamos analizando placas, con una sola variable de campo θ(x, y) la cual se va a determinar en cada punto P (x, y) de tal manera que una ecuación diferencia conocida se cumpla en cada uno de los puntos pertenecientes al dominio espacial para nuestra variable φ.. Figura 1 Dominio de definición de variable de campo θ(x, y). En la práctica generalmente el dominio pude ser geométricamente muy complejo, así mismo la solución del problema podría ser muy engorrosa y la solución exacta al problema planteado podría ser muy poco probable. Por lo tanto, las soluciones aproximadas (numéricas) son más adecuadas para estos problemas. El elemento finito es justamente una técnica basada en la 7 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
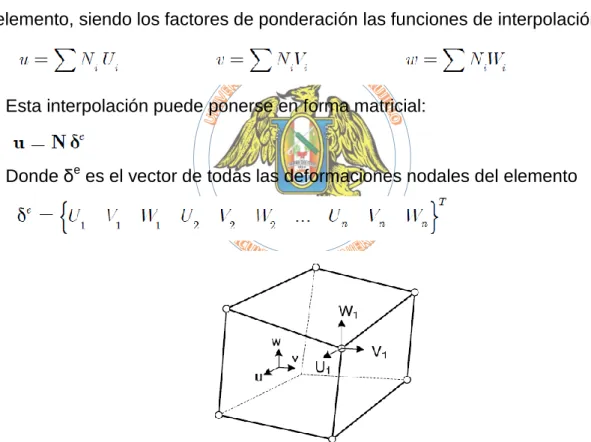
(16) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. discretización del dominio mientras más fino sea esto más cerca de la solución estaremos aparentemente ya que hay que recordar que cualquier solución numérica no es una solución real y exacta al problema planteado sino simplemente una aproximación.. Figura 2 El elemento finito con sus nodos. Ahora definamos un elemento triangular que encierra un subdominio de tamaño finito. Que este elemento no sea un elemento diferencial de tamaño dx×dy hace del ello un elemento finito, es decir tiene dimensiones finitas (no infinitesimales). Para continuar con nuestro tratamiento debemos señalar que la dimensión Z permanece constante y que la variación de la propiedad a lo largo de esta componente es muy pequeña ósea despreciable o simplemente no existe. En nuestro elemento triangular mostrado podemos observar los vértices los cuales se convertirán en nodos. En los nodos calcularemos el valor de la variable de manera explícita. Tenemos dos tipos de nodos los exteriores e interiores, los exteriores son los únicos que pueden conectarse directamente a otro nodo exterior de otro elemento.. En el elemento finito solo calculamos el valor de la variable en los nodos, pero cómo es posible ahora hallar el valor de la variable en cualquier punto dentro del dominio, y más aún sino este punto no es un vértice. La respuesta es muy simple con los valores calculados en los nodos lanzaremos una interpolación la cual nos permitirá calcular el valor de la variable en cualquier punto. θ(x, y) = N1(x, y)θ1 + N2(x, y)θ2 + N3(x, y)θ3 En la ecuación anterior podemos observar que θ1, θ2, y θ3 son valores de la variable en los nodos y N1, N2, y N3 son las funciones de interpolación conocidas como funciones de forma. El punto principal en este análisis es que. 8 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(17) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. las funciones de forma se tratan como funciones conocidas de las variables independientes De tal manera que los elementos dentro del dominio se conectan uno a uno si esto es así se mantiene la continuidad de la variable a lo largo de todo el dominio esto garantiza que el sistema pueda ser resuelto. En temimos físicos por ejemplo en la parte estructural estaríamos frente al problema de un agujero, o espacio interno, en un problema de transferencia de calor estaríamos frente a un problema donde un punto tendría dos temperaturas lo cual en términos lógicos sería una completa aberración.. Figura 3 Empieza la discretización del dominio. Convergencia del elemento finito La discretización no es más que la representación del dominio con elementos finitos y físicamente la resultante de esto es conocida como la malla de elemento. En la siguiente figura podemos observar cómo se discretiza un dominio con elementos cuadrados. Una forma de acercarse a la solución sería aumentar el número de elementos de la manera que la malla se aproxime al dominio y la otra seria de utilizar otro tipo de elemento que tenga lados curvos para acercarse más rápido a la forma del dominio.. Figura 4 Se puede apreciar cómo se lleva a cabo la refinación de la malla.. 9 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(18) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. 2.3.1 Procedimiento general Existen ciertos pasos que deben ser respetados para llevar a cabo un análisis por elemento finito ya sea que se trate de un problema estructural, Térmico, etc. Pre–procesamiento El paso de pre–procesamiento es, muy generalmente, descrito como el proceso de definir al modelo e incluye las siguientes acciones a ejecutar: Definir el dominio geométrico del problema. Definir el tipo del elemento a ser utilizado. Definir las propiedades materiales de los elementos. Definir las propiedades geométricas de los elementos (la longitud, el área, etc.). Definir las conectividades de los elementos (el modelo de la malla). Definir las restricciones físicas (condiciones de borde límite). Definir la solicitación o perturbación externa. El paso de pre–procesamiento (la definición del modelo) es realmente criticó. En ningún caso es más apropiado el ejemplo del axioma relacionado con los procesos relacionados con el uso de la computadora ―basura entrante, resulta en basura saliente‖. Una solución de elemento finito perfectamente calculada numéricamente no posee absolutamente ningún valor si corresponde a un pésimo proceso de modelado o a un problema erróneamente planteado.. Procesamiento o Solución Durante la fase de solución, el software de elemento finito ensambla las ecuaciones algebraicas gobernantes en forma matricial y calcula los valores desconocidos de las variables primarias del campo involucrado en el problema. Los valores computados se usan luego por sustitución regresiva para evaluar las variables adicionales, derivadas o secundarias, como las fuerzas de reacción, tensiones de elemento, flujo de calor, velocidades y aceleraciones de movimiento, etc. Como no es raro para el modelo de elemento finito el ser representado por miles de ecuaciones en un problema ampuloso, se usan técnicas especiales de solución para reducir los requisitos del almacenamiento 10 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(19) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. de datos y el tiempo de cómputo. Para problemas lineales, que presenta por ejemplo la estática, tenemos un algoritmo muy eficiente que normalmente se usa.. Post–procesamiento El análisis y la evaluación de los resultados de la solución son denominados como post–procesamiento. El software asociado a este proceso importante del método de elemento finito contiene rutinas sofisticadas usadas para ordenar, imprimir, y trazar los resultados seleccionados de una solución que haya sido obtenida. Los ejemplos de operaciones que puede lograrse en esta fase incluyen Clasificar las tensiones internas de elemento en orden de magnitud. Verificar el equilibrio estático estructural. Calcular factores de seguridad de diseño. Bosquejar la deformación estructural producida. Producir esquemas dinámicos de la respuesta del modelo. Producir graficas de color–codificado para el campo de temperaturas.. Puesto que los datos de la solución pueden manipularse de muchas maneras en la fase final de post–procesamiento, el objetivo más importante es aplicar de modo legítimo el juicio de ingeniería con el objetivo de determinar las condiciones bajo las cuales los resultados de la solución obtenida son físicamente razonables.. Campo de deformaciones El campo de deformaciones en un punto cualquiera del dominio está definido por un Vector u que tiene tantas componentes como deformaciones existen en el dominio.. Para el caso de un problema espacial es:. 11 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(20) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. Si se considera un elemento finito cualquiera, el campo de deformaciones en su interior se aproxima, haciendo uso de la hipótesis de interpolación, como un promedio ponderado de las deformaciones en cada uno de la n nudos del elemento, siendo los factores de ponderación las funciones de interpolación:. Esta interpolación puede ponerse en forma matricial:. Donde δe es el vector de todas las deformaciones nodales del elemento. Figura 5 Deformaciones en un elemento finito. La matriz de funciones de interpolación N tiene tres filas y tantas columnas como grados de libertad haya entre todos los nudos del elemento. La estructura de esta matriz siempre es del tipo:. 12 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(21) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. Deformaciones unitarias Las deformaciones unitarias en un punto cualquiera del elemento, con la suposición de pequeñas deformaciones, son:. Se pueden poner en la forma matricial siguiente:. En esta expresión se identifica el operador matricial ∂ que permite pasar de las deformaciones de un punto u a las deformaciones unitarias ε. Este operador tiene tantas filas como deformaciones unitarias haya en el problema y tantas columnas como componentes tenga el campo de desplazamientos u. 13 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(22) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. Sustituyendo las deformaciones u en función de las deformaciones nodales, mediante las funciones de interpolación, se obtiene:. En esta relación se identifica la matriz B:. Tal que se cumple que:. Esta matriz B relaciona las deformaciones de los nudos del elemento δe con las deformaciones unitarias en un punto interior cualquiera del elemento. Por lo tanto B representa el campo de deformaciones unitarias que se supone existe en el interior del elemento finito, como consecuencia de la hipótesis de interpolación de deformaciones efectuada, y juega un papel fundamental en el método de los elementos finitos. Dada la estructura de la matriz N, la matriz B se puede poner siempre en la forma:. Cada una de las matrices Bi tiene la forma siguiente:. 14 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(23) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. Aunque el valor de B se ha obtenido para el caso de elasticidad tridimensional, su valor en función de ∂ y N es totalmente general para otros tipos de problemas de elasticidad, como flexión de placas, problemas de revolución, etc.. Estado de tensiones Las tensiones en un punto cualquiera del dominio están definidas por el tensor de tensiones en dicho punto, cuya expresión general es:. Asimismo, se conoce la ecuación constitutiva del material que forma el dominio, y que relaciona las tensiones con las deformaciones unitarias. Para un material elástico lineal esta ecuación constitutiva se puede poner en la forma:. 15 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(24) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. Siendo: • D la matriz elástica, que para un material elástico lineal es constante y depende de sólo dos parámetros: el módulo de elasticidad E y el módulo de Poisson ν. • ε0 el vector de las deformaciones unitarias iniciales existentes en el material en el punto considerado, que deben ser conocidas. Las más habituales son las debidas a las temperaturas, aunque pueden incluirse en ellas las debidas a los errores de forma, etc. • ζ0 las tensiones iniciales presentes en el material, que normalmente son tensiones residuales debidas a procesos anteriores sobre el material (p.e. tratamiento térmico) y que por lo tanto son conocidas. Las expresiones particulares de la matriz elástica D y de los vectores ε0 y ζ0 dependen del tipo de problema considerado y serán estudiadas en cada caso particular.. Ecuación de equilibrio de un elemento Una vez que han quedado establecidas las expresiones que relacionan los desplazamientos, las deformaciones unitarias y las tensiones, en función de los desplazamientos de los nudos, se está ya en condiciones de calcular las ecuaciones de equilibrio de un elemento finito. Si se considera un elemento finito cualquiera, las fuerzas que actúan sobre él, en el caso más general, son las siguientes: • Fuerzas exteriores de volumen aplicadas en el interior del elemento qv, que son en general variables dentro del elemento, y tienen tantas componentes como desplazamientos haya en cada punto. • Fuerzas exteriores de superficie aplicadas en el contorno libre del elemento qs, que son en general variables a lo largo del contorno, y tienen tantas componentes como desplazamientos tenga cada punto del contorno. Al contorno sobre el que actúan las fuerzas de superficie se le denomina s. • Fuerzas interiores qc, aplicadas en la superficie del contorno de unión del elemento con los elementos vecinos, que son desconocidas. A dicho contorno de unión se le denomina c. 16 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(25) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. • Fuerzas exteriores puntuales aplicadas sobre los nudos del elemento. .. Figura 6 Fuerzas sobre un elemento. El trabajo virtual que producen estas fuerzas es:. Donde δu es una variación virtual del campo de deformaciones u y δδe es la variación correspondiente a los grados de libertad de los nudos. Durante estas variaciones, las fuerzas exteriores se mantienen constantes.. Aplicando el principio de los trabajos virtuales se obtiene que para que haya equilibrio, el trabajo virtual de las fuerzas debe ser igual a la variación de la energía elástica U acumulada en el elemento:. Donde δε es la variación en las deformaciones unitarias producida por la variación en las deformaciones δu. Por lo tanto, la ecuación de equilibrio del elemento es:. Aplicando la hipótesis de interpolación de deformaciones, la variación virtual del campo de deformaciones es: δu = N δδe. 17 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(26) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. La variación de las deformaciones unitarias se relaciona con la variación de las deformaciones nodales a través de la matriz B: δε = B δδe Sustituyendo las variaciones δu y δε, se obtiene la ecuación de equilibrio aproximada mediante la hipótesis de interpolación de deformaciones:. Considerando que esta ecuación se debe cumplir para cualquier variación arbitraria de las deformaciones, se obtiene:. Esta ecuación representa el equilibrio del elemento finito. Antes de seguir desarrollándola, la integral debida a las fuerzas distribuidas qc sobre el contorno de unión (desconocidas) se sustituye por:. Figura 7 Fuerzas de conexión entre elementos. Donde. son unas fuerzas que están aplicadas sobre los nudos del. elemento, y que son equivalentes a las fuerzas distribuidas aplicadas sobre los contornos de unión con los elementos vecinos. Ambas fuerzas producen el mismo trabajo virtual. La ecuación de equilibrio del elemento queda finalmente:. 18 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(27) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. Sustituyendo en ella el valor de la tensión mediante la ecuación constitutiva se obtiene:. Sustituyendo a continuación el valor de la deformación unitaria en función de la matriz B se obtiene:. Reordenando los distintos términos se llega a:. Esta es la ecuación final de equilibrio del elemento finito considerado. En ella se identifican los siguientes términos: • Matriz de rigidez del elemento finito. Se trata de una matriz cuadrada simétrica de tamaño igual al número de grados de libertad del elemento.. Vector de fuerzas nodales equivalentes debido a las fuerzas actuantes por unidad de volumen.. Figura 8 Fuerzas nodales equivalentes a las de volumen. 19 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(28) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. Vector de fuerzas nodales equivalentes a las fuerzas exteriores de superficie.. Vector de fuerzas nodales equivalentes producidas por las deformaciones iniciales existentes en el material:. Vector de fuerzas nodales equivalentes debidas a las tensiones iniciales existentes en el material:. La ecuación de equilibrio del elemento puede ponerse en forma compacta como:. Esta ecuación de equilibrio está referida al sistema de ejes en el que se hayan definido las coordenadas y las deformaciones de los nudos, y al que lógicamente también se habrán referido las distintas fuerzas actuantes. En ella son conocidos todos los términos de carga salvo el debido a las fuerzas distribuidas interiores. que se producen en el contorno de unión con los. elementos vecinos.. Elasticidad bidimensional Los problemas de elasticidad bidimensional son muy frecuentes en Ingeniería, y son Así mismo los primeros en los que se aplicó el MEF. En este caso el medio continuo que se analiza es plano, y se considera situado en el plano XY. Se denomina t al espesor del dominio en su dirección transversal, el cual se considera despreciable frente a las dimensiones del dominio en el plano XY. La posición de un punto está definida por dos coordenadas (x,y), y su deformación tiene dos componentes u(x,y), v(x,y) en las direcciones x,y respectivamente. El campo de deformaciones es por lo tanto un vector:. 20 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(29) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. Dentro de la elasticidad en dos dimensiones existen dos problemas diferentes: • Tensión plana: cuando la tensión ζz en sentido perpendicular al plano xy es cero, ya que el sólido puede dilatarse libremente en el sentido de su espesor. Por lo tanto existe una deformación unitaria εz no nula en dicha dirección. • Deformación plana: cuando en el sentido del espesor del sólido no hay posibilidad de deformación, es decir εz =0 por lo que se genera una tensión en dicha dirección ζz no nula. En ambos casos la tensión y la deformación en la dirección z no contribuyen a la energía elástica del sistema. Las ecuaciones diferenciales que rigen el problema son de orden m=2 en las deformaciones, pues contienen la derivada primera de las tensiones, que a su vez son derivadas de las deformaciones. En la expresión del potencial total del sistema aparecen las deformaciones unitarias ε, que son las derivadas primeras de las deformaciones u, luego el orden de derivación de las incógnitas primarias u en el potencial es n=1. Se requieren por lo tanto funciones de interpolación con continuidad C0 para asegurar la convergencia del método.. Funciones de interpolación El campo de deformaciones en el interior del elemento se aproxima mediante la expresión habitual:. En forma matricial es:. El vector de todas las deformaciones nodales del elemento δe es:. Siendo n el número de nudos del elemento. La matriz de funciones de interpolación N tiene 2 filas y tantas columnas como grados de libertad haya 21 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(30) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. entre todos los nudos del elemento. La estructura de esta matriz siempre es la misma:. Figura 9 Interpolación de deformaciones. Deformaciones unitarias Las deformaciones unitarias en un punto del elemento finito son:. Se pueden poner en la forma:. Donde se identifica al operador matricial ∂ que pasa de las deformaciones u a las deformaciones unitarias. Sustituyendo las deformaciones u en función de las deformaciones nodales, a través de las funciones de interpolación, se obtiene: 22 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(31) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. Se identifica de esta forma la matriz B:. Esta matriz relaciona las deformaciones de los nudos con las deformaciones unitarias en un punto cualquiera del elemento. Por lo tanto B representa el campo de deformaciones unitarias que se supone existe en el interior del elemento finito, como consecuencia de la hipótesis de interpolación de deformaciones efectuada. Esta matriz se puede poner en la forma:. Siendo cada una de las submatrices. Nótese que, debido a la estructura de B, las deformaciones unitarias en el interior del elemento se pueden poner en función de las deformaciones nodales en la forma:. 23 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(32) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. Estado de tensiones ecuación constitutiva El estado de tensiones en dos dimensiones es:. La ecuación constitutiva, en ausencia de temperaturas, es:. Para un material elástico lineal e isótropo la matriz elástica D es constante. Su expresión es diferente para los dos problemas de elasticidad plana. • Tensión plana. En este caso la tensión transversal al material (z) es nula, pero éste es libre de dilatarse en dirección z: Se parte de la ecuación constitutiva en el estado tridimensional:. Imponiendo en la tercera ecuación la condición ζz = 0 se obtiene:. De donde se calcula el valor de la deformación unitaria transversal al material:. Sustituyendo en la expresión inicial del estado tridimensional (y considerando además que ζyz=0, ζzx=0), se obtiene la matriz elástica del estado plano:. 24 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(33) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. • Deformación plana. En este caso la deformación unitaria transversal al material (z) es nula, pues éste es incapaz de dilatarse en dirección z. En consecuencia debe existir tensión en dicha dirección: Para obtener la ecuación constitutiva es suficiente con hacer cero las deformaciones unitarias correspondientes en la ecuación tridimensional: basta por lo tanto con extraer las filas y columnas correspondientes al estado plano. Se obtiene la siguiente matriz elástica:. Nótese que aparece una tensión en la dirección z, cuyo valor se deduce simplemente de la ecuación en la dirección z:. Deformaciones unitarias iniciales. temperaturas La presencia de deformaciones unitarias iniciales introduce un nuevo término en la ecuación constitutiva:. siendo ε0 el vector de las deformaciones unitarias iniciales existentes en el material en el punto considerado, que deben ser conocidas. Si las deformaciones unitarias iniciales ε0 están producidas por un incremento de temperatura T, su valor es, para el estado de tensión plana:. 25 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(34) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. Las deformaciones unitarias iniciales son iguales en ambas direcciones x e y, y además no se genera deformación de cortante. Para el caso de deformación plana, a la dilatación αT en las dos direcciones x, y se suma la imposibilidad de dilatarse según z, lo que origina una tensión en dicho sentido, la cual genera a su vez una deformación unitaria según los ejes x, y, por efecto de Poisson, y que se suma a las iniciales:. Elemento triangular Este elemento tiene seis desplazamientos en los nudos, que forman un vector:. Los desplazamientos de un punto cualquiera dentro del elemento se pueden representar en función de estos seis valores nodales, mediante una expresión polinómica. Dado que hay seis deformaciones nodales, el polinomio sólo podrá tener seis términos:. Estas expresiones pueden ponerse en forma matricial:. Los seis parámetros αi se pueden calcular aplicando la expresión a los tres nudos del elemento, y agrupando las seis ecuaciones obtenidas (dos en cada nudo):. 26 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
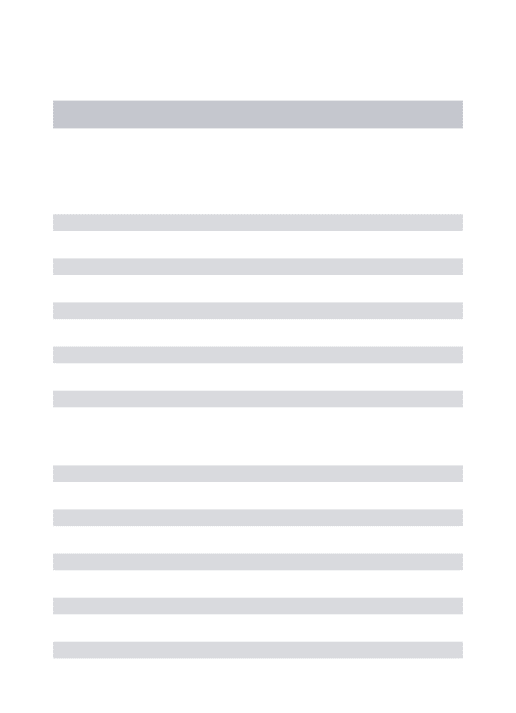
(35) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. Es decir:. Despejando α y sustituyendo en la expresión de u se obtiene:. Esta expresión define las funciones de interpolación como:. Efectuando el producto de matrices anterior se obtiene la expresión:. Las tres funciones de interpolación correspondientes a los tres nudos son:. Las distintas constantes dependen de la geometría del elemento:. En la ecuación anterior, A es el área del elemento, cuyo valor se obtiene mediante el determinante:. Se observa que si el elemento tiene área nula (dos nudos coincidentes) eso se manifiesta en A=0 y no se pueden calcular las Ni. Estas funciones son planos de valor 1 en el nudo i y 0 en los otros dos nudos. 27 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(36) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. Al. ser. las. tres. funciones. de. interpolación. planos,. el. campo. de. desplazamientos en el interior del elemento es también un plano que pasa por los tres valores nodales del desplazamiento. En consecuencia, si se emplea este elemento, el campo de deformaciones en una dirección cualquiera u o v se aproxima mediante una superficie poliédrica de facetas triangulares.. Figura 10 Funciones de interpolación del elemento triangular. El estado de deformación unitaria viene definido por la matriz B, que en este caso Vale:. Efectuando las derivadas, la expresión de esta matriz es:. Esta matriz se puede poner en la forma:. Se observa que la matriz B es constante, y no depende de x,y. Por lo tanto las deformaciones unitarias ε son constantes en todo el elemento, y también lo serán las tensiones, que son proporcionales a ellas.. 28 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(37) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. La matriz de rigidez del elemento se obtiene a partir de su expresión general. Dada la estructura de B, se puede poner en la forma:. Siendo t el espesor del elemento. La matriz K se puede dividir en 3x3 submatrices, que relacionan a los tres nudos entre sí:. Cada una de ellas tiene la expresión:. Dado que Bi y D son constantes, su valor resulta ser (suponiendo espesor t uniforme):. Donde Dij son los coeficientes de la matriz elástica D. • El estado de tensiones en un punto cualquiera del elemento es:. 29 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(38) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. Se observa que el estado de tensiones no depende de las coordenadas x,y sino que es uniforme en todo el elemento. Por lo tanto, si se emplea este elemento el campo de tensiones en el material se aproxima mediante una serie de valores constantes, formando una superficie escalonada. En consecuencia, este elemento sólo debe utilizarse con mallados muy finos si se prevé un campo de tensiones variable.. Las fuerzas nodales equivalentes a las deformaciones iniciales térmicas son:. Suponiendo un incremento de temperatura T uniforme en todo el elemento, el integrando de la expresión anterior resulta ser constante con lo que se obtiene, para el caso de tensión plana:. Funciones de interpolación de tipo c0 Se han desarrollado elementos finitos sencillos, a base de definir un polinomio interpolante de las deformaciones y a continuación determinar los coeficientes de dicho polinomio a base de ajustarlo a los valores nodales de las deformaciones. Una vez ajustado este polinomio y determinadas las funciones de interpolación Ni, el proceso de cálculo de las propiedades del elemento es siempre el mismo, con independencia del tipo de elemento. La definición de las funciones de interpolación es por lo tanto el paso fundamental en el análisis por el MEF, y de él depende en gran manera la precisión de los resultados obtenidos.. 30 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
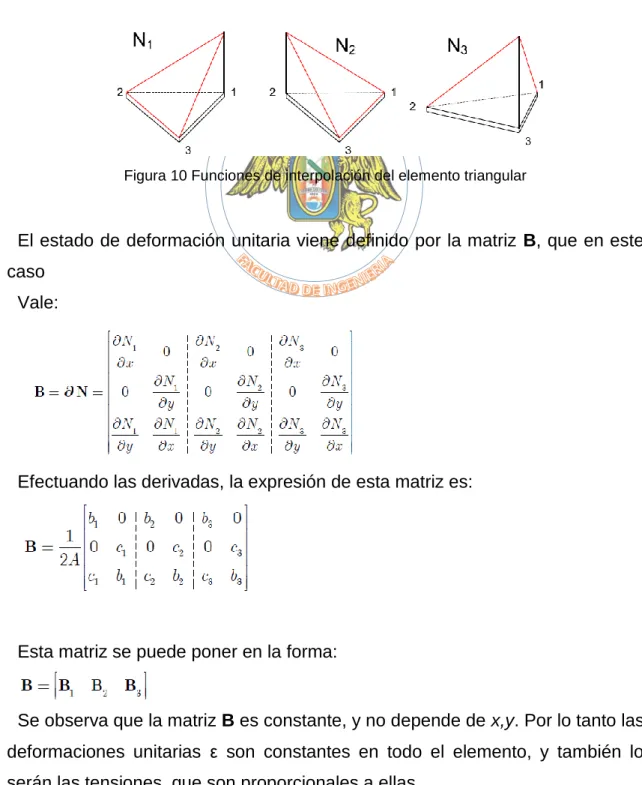
(39) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. La matriz N tiene tantas filas como desplazamientos se consideren para un punto del continuo (dos en el caso plano), y tantas columnas como grados de libertad haya entre todos los nudos del elemento. La estructura de esta matriz siempre es la misma, y para el caso plano es:. Siendo n el número de nudos del elemento. Resulta por lo tanto de gran interés definir las funciones de interpolación de los nudos Ni, para cada tipo de elemento. En los apartados siguientes se presentan funciones de interpolación con compatibilidad de tipo C0, es decir que garantizan la continuidad de la propia función en los bordes entre elementos. Las funciones de interpolación siempre son del tipo polinómico. El número de términos de éste polinomio viene determinado por el número de grados de libertad del elemento, que define el número de parámetros independientes que pueden utilizarse para definir el polinomio. En general se trata de utilizar polinomios completos del mayor grado posible. El número de términos que aparecen en un polinomio de grado dado y dos variables x,y, se puede deducir del triángulo de Pascal. Por ejemplo: un polinomio completo de grado 1 requiere tres términos, el de grado 2 requiere seis términos, el de grado 3, diez términos, etc. Elementos triangulares En los elementos triangulares se utilizan unas coordenadas locales muy particulares, que son las coordenadas de área. Estas coordenadas se definen como:. Y análogamente las otras 2 coordenadas L2 y L3. La expresión general es:. 31 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(40) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. Evidentemente se cumple que L1 + L2 + L3 = 1 Las líneas de Li constante son rectas paralelas al lado JK (figura 4.17).. Figura 11 Coordenadas de área. Figura 12 Valores constantes de la coordenada de área L1. Elemento de tres nudos Las funciones de interpolación son: Ni = Li. i = 1, 3. La función del nudo i es un plano que pasa por el lado opuesto al vértice i, y que vale 1 en dicho nudo i. Al igual que en los rectángulos estas funciones se llaman básicas.. Figura 13 Elemento de tres nudos. 32 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
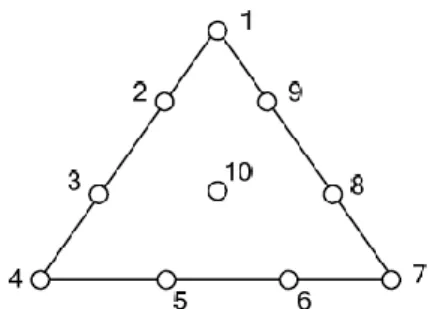
(41) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. Elemento de seis nudos En sus lados las funciones de interpolación varían de forma cuadrática. Cada nudo intermedio tiene una función que vale:. Figura 14 Elemento de seis nudos y función de interpolación del nudo 2. Las funciones de los nudos de esquina se calculan a partir de las funciones básicas, restando a cada una de ellas 1/2 de las funciones correspondientes a los nudos intermedios que hay en los lados adyacentes:. Figura 15 Corrección de nudo esquina. Se obtienen las siguientes funciones de interpolación:. Elemento de diez nudos En este elemento se debe incluir un nudo en su centro con el fin de cubrir todo un 33 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(42) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. polinomio completo de grado tres, que requiere diez términos.. Figura 16 Elemento triangular de diez nudos. Las funciones de los nudos intermedios son:. Para el nudo central la función de interpolación es la función de la burbuja: , que tiene valor nulo en todo el contorno del triángulo. Las funciones de las esquinas se obtienen de manera análoga al caso de los rectángulos. Cada lado con dos nudos afecta a los dos nudos de esquina del lado de la forma siguiente:. Donde i es el nudo esquina, y k1 y k2 son los dos nudos intermedios adyacentes, siendo k1 el más próximo a i y k2 el más lejano. Para el otro nudo esquina del lado, que llamaremos j la corrección es:. Figura 17 Corrección de nudos esquina. 34 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(43) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. Formulación isoparamétrica Se han estudiado hasta el momento diversos tipos de elementos que se caracterizan por un número creciente de nudos, lo que les permite interpolar el campo de desplazamientos de forma sofisticada, y alcanzar una gran precisión en el análisis. Sin embargo para todos ellos se han utilizado formas sencillas como triángulos o rectángulos, mediante los cuales resulta difícil el adaptarse a la forma de la estructura a estudiar, que normalmente tiene forma curva. En este apartado se trata de estudiar elementos finitos con forma más compleja: así, por ejemplo un elemento que es rectangular en sus coordenadas locales puede ser transformado en uno que es curvilíneo en coordenadas cartesianas. Para ello es necesario definir alguna relación entre las coordenadas de un punto en el sistema local y las mismas en el sistema general:. Esta transformación de coordenadas define la forma del elemento en el sistema cartesiano.. Matriz de rigidez La expresión obtenida para la matriz de rigidez de un elemento plano cualquiera es:. En ella aparece la matriz B, que se obtiene derivando la matriz de funciones de interpolación N respecto a las coordenadas x e y. Sin embargo, la matriz N está definida en las coordenadas locales normalizadas del elemento ξ,η, por lo que es necesario transformar las derivadas entre unas coordenadas y otras. Una vez obtenida la matriz B hay que efectuar la integral anterior al dominio de todo el elemento. Ésta es muy simple en coordenadas locales pero es complicada en general en coordenadas generales, dado que el elemento puede ser curvo. Para resolver este problema lo que se hace es evaluar la integral anterior en coordenadas locales ξ,η, pasando todas las expresiones necesarias a dichas coordenadas. En la expresión de la matriz B se observa que es necesario. 35 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(44) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. disponer de todas las derivadas de las funciones de interpolación respecto a las coordenadas generales x,y. Siguiendo las reglas de la derivación se puede poner la siguiente relación matricial entre las derivadas en ambos sistemas de coordenadas:. La matriz J es la Jacobiana de la transformación de coordenadas (x,y) a ξ,η. Despejando se obtiene:. El vector de la derecha es conocido sin más que derivar las Ni respecto a ξ,η, y conociendo J se pueden obtener de la expresión anterior todas las derivadas que forman la matriz BBi. • El cálculo de J se hace apoyándose en la interpolación de coordenadas:. Esta expresión puede ser evaluada fácilmente ya que las funciones N son conocidas en función de ξ,η y xi,yi son las coordenadas de los nudos que definen la forma del elemento. • El dominio de integración expresado en coordenadas locales es:. Donde aparece el determinante J de la matriz Jacobiana, que se calcula a partir de la expresión de ésta, y es en general una función de ξ,η. La presencia del espesor del elemento t en la integral anterior permite tratar con gran sencillez elementos de espesor variable. Para ello la solución práctica más habitual consiste en suponer que la ley de variación del espesor puede 36 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(45) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. aproximarse por interpolación de los valores del espesor en los nudos ti, mediante la expresión habitual:. Considerando la estructura de la matriz B, la matriz de rigidez K es:. La matriz K se puede dividir en n x n submatrices, que relacionan a los n nudos entre sí:. Cada una de las submatrices tiene la expresión:. Sustituyendo los valores de las distintas matrices se obtiene:. Estudiando la naturaleza de los distintos términos del integrando se observa que si el determinante del Jacobiano J es constante, el integrando es un polinomio. Sin embargo si J no es constante, el integrando es un cociente de polinomios. En el primer caso la integral puede efectuarse de forma exacta empleando métodos numéricos adecuados, mientras que en el segundo la integración numérica siempre es aproximada.. Fuerzas de volumen Su expresión general es:. Con objeto de simplificar la implementación práctica del método, es habitual restringir la posible variación de las fuerzas de volumen y limitarla sólo a 37 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
(46) BIBLIOTECA DIGITAL - DIRECCIÓN DE SISTEMAS DE INFORMÁTICA Y COMUNICACIÓN. aquellas que pueden ser representadas por las propias funciones de interpolación. De esta forma la variación de las fuerzas de volumen se puede representar mediante una interpolación de sus valores nodales, empleando las propias funciones de interpolación:. Siendo. los valores nodales de las fuerzas de volumen, que son. constantes. Con esto se obtiene la siguiente expresión del vector de fuerzas nodales equivalentes:. Considerando la estructura de la matriz N, la matriz M es:. Con lo que la matriz M se puede dividir en nxn submatrices, que relacionan a la n nudos entre sí:. Siendo cada una de ellas:. El cálculo de la matriz M no presenta ningún problema, efectuándose en el sistema local de coordenadas, en el que se conoce la matriz de interpolación N. Todos los términos que la forman son polinomios, por lo que se puede evaluar de forma exacta por métodos numéricos.. 38 Esta obra ha sido publicada bajo la licencia Creative Commons Reconocimiento-No Comercial-Compartir bajo la misma licencia 2.5 Perú. Para ver una copia de dicha licencia, visite http://creativecommons.org/licences/by-nc-sa/2.5/pe/.
Figure



+7


Documento similar
Así, antes de adoptar una medida de salvaguardia, la Comisión tenía una reunión con los representantes del Estado cuyas productos iban a ser sometidos a la medida y ofrecía
La recuperación histórica de la terciaria dominica sor María de Santo Domingo en los últimos años viene dada, principalmente, por causa de su posible influjo sobre personajes
‘fuente de la deidad’ (Theol.. 2) Las Hénadas (h’t&ç), etimológicamente ‘unidades’, son los dioses supremos, las primeras manifestaciones del Uno, que
que hasta que llegue el tiempo en que su regia planta ; | pise el hispano suelo... que hasta que el
Sanz (Universidad Carlos III-IUNE): "El papel de las fuentes de datos en los ranking nacionales de universidades".. Reuniones científicas 75 Los días 12 y 13 de noviembre
(Banco de España) Mancebo, Pascual (U. de Alicante) Marco, Mariluz (U. de València) Marhuenda, Francisco (U. de Alicante) Marhuenda, Joaquín (U. de Alicante) Marquerie,
Ciaurriz quien, durante su primer arlo de estancia en Loyola 40 , catalogó sus fondos siguiendo la división previa a la que nos hemos referido; y si esta labor fue de
Las manifestaciones musicales y su organización institucional a lo largo de los siglos XVI al XVIII son aspectos poco conocidos de la cultura alicantina. Analizar el alcance y
