IDENTIFICACION DE SISTEMAS
MEDIANTE REDES ADAPTIVAS
Y
ELIMINACI~NDE
INTERFERENCIAS
TESIS QUE PRESENTA
LUIS NIÑO DE RIVERA Y OYARZABAL
PARA OBTENER EL GRADO DE
DOCTOR EN CIENCIAS
SEPTIEMBRE DE 1999
UNIVERSIDAD
A U T ~ N O M A
METROPOLITANA
AGRADECIMIENTOS
Al sistema de Educación Publico Méxicano, con
especial reconocimiento al
Instituto Politécnico Nacional
y
a todos aquellos que con su esfuerzo
y
ayuda han participado en mi formación.
A MI MASESTRO el Dr. Héctor Manuel Pérez Meana quien no sólo me
asesoró en la realización de esta tésis, sino
también me brindó su más decidido
apoyo, amistad y solidaridad en los momentos difíciles.
Al Dr. Edgar Sánchez-Sinencio cuyos acusiosos cuestionamientos fueron de
gran ayuda para profundizar en la investigación realizada.
Al Dr. Miguel Lindig B. Por su ayuda en la revisión de esta tesis
A
mis amigos:
Juan Carlos Sánchez Garcia
Mariko Nakano Miyatake
Gonzalo Duchen Sánchez
Rubén Vázquez Medina
Jesus Barrios Romano.
Por su verdadera y solidaria amistad
Ami Madre y a Mi hija María de Lourdes con mi más profundo
reconocimiento por su comprensión.
INDICE CAPITULO 1
Motivación de la investigación realizada y estado del arte
1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 1.10
El Filtro Adaptable
Compresión de señales de audio Eliminación de interferencias Cancelación de Eco
Filtrado analógico y redes neuronales
Antecedentes trascendentes de la investigación realizada Aportaciones al Estado del arte
Ambito de la investigación realizada Metodología
Organización de la tesis
CAPITULO 2
Desarrollo del tema de investigación
Filtros adaptivos continuos Gamma y Laguerre
2.1 Introducción
2.3 Estructuras para filtrado adaptable de tiempo continuo 2.3 Filtros de Laguerre
1.3 Filtro Gamma
2.5 Algoritmo de Adaptación 2.6 Condiciones de Convergencia 2.7 Simulaciones
2.8 Conclusiones
CAPITULO 3
Linea de retardo analógica para filtrado adaptable
Resumen lntroducclón
Síntesls de las funciones de Laguerre
Estructura modular en l a síntesis del filtro analógico. Linea de retardo
Anillsls de la línea con desbalance Rehultados experimentales
Flltro d c Laguerre con retardo no ideal Linea dc retardo anal6gica VLSI
Flltro adaprrtble con mas de un retardo entre coeficientes
C o n c i u b ~ o n c s
C,APITULO 4
Algoritmo LMS de paso vanable normalizado 4 1 Introducclcin
4.2 Algorltmo Normalizado de paso variable (TVS-LMSI )
4.3 Algoritmo LMS de paso vanable normalizado (TVS-LMS2) 4.4 Resultxios obrenldos
4.5 Anállsls comparatlvo de algoritmos de paso variable 4.6 Concluslones
CAPITULO 5
Estructura modular de u n filtro adaptable analóglco NLMS 5.1 Introducción
1-1 1-2 1-5 1-6 1-7 1-10 1-12 1-17 1-17 1-18 2-1 2-3 2-6 2-7 2-7 2-9 2-10 2-12 2-12
3- 1
3- I 3-2 3-3 3-6 3-6 3-9 3-8 3-10 3-1 I
3- 14 3-17 4-1 4-2 4-3 4-8 4-13 4-17 4-20 5-1
5.2 Estructura modular
5.3 Habilidad en el seguimiento
5.5 Propuesta de un algoritmo normalizado de paso variable
5.6 Comportamiento de convergencia del algoritmo de paso variable 5.7 Efecto del offset en estructuras adaptivas analógicas
5.8 Estructura VLSI analógica para el algoritmo de paso variable 5.9 Conclusiones
CAPITULO 6
Filtro adaptable continuo analógico LMS por aproximación de gradiente casi ideal
._ 5.4 Prueba de Convergencia
6.1 Resumen
6.2 Introducción
6.3 Estructura adatable propuesta
6.4 Algoritmo LMS modificado y normalizado
6.5 Comportamiento transitorio y constante de tiempo del algoritmo propuesto 6.6 Factor de convergencia
6.7 Resultados obtenidos 6.8 Conclusiones
Conclusiones generales y lineas de investigación a futuro
5-3 5-4 5-5 5-9 5-15 5-16 5-19 5-20 6-1 6-1 6.2 6-3 6-3 6-5 6-7 6-10
6-1 1 6-12
APENDICE I APENDICE I1 Bibliografía
CAPITULO 1
M O T I V A C I ~ N DE LA I N V E S T I G A C I ~ N , ESTADO DEL ARTE Y
APORTACI~NES DE LA INVESTIGACI~N
1,l El filtro adaptable.
Desde el filtro de Wiener propuesto en 1945 [,1],[2],[3],[5] hasta la propuesta de Widrow del algoritmo de mínimos cuadrados LMS [8],[3] se ha desarrollado una teoría ampliamente
sustentada de lo que hoy constituyen los filtros adaptables [5]. Se han propuesto diversas soluciones en el campo de la identificación de sistemas [4],[6],[8]. La predicción y l a
eliminación de interferencias (supresión de ruido, cancelación de eco) han sido desarrolladas
bajo la operación de diversos algoritmos programados en computadoras digitales. En las
propuestas disponibles se buscan soluciones a problemas fundamentales: la búsqueda de
algoritmos que presenten la menor complejidad de cómputo posible y el abatimiento de los
tiempos de procesamiento.
Algunos de los problemas de frontera más significativos se presentan en aplicaciones que
requieren estimación en tiempo real. Los problemas que se presentan en la identificación de
patrones contaminados con ruido pueden ser analizados mediante redes adaptables que
permitan la separación de l a señal deseada en u n ambiente donde se desean eliminar tnrerferencias no deseadas. Los sistemas adaptables que estiman las variables a identificar lo
han hecho con base en estructuras discretas que estiman los coeficientes del filtro adaptable
mediante métodos numéricos que resuelven algoritmos de aprendizaje. El algoritmo de búsqueda de gradiente es altamente recomendable por su sencillez de cómputo. La
complejidad del filtro adaptable está en función de su tamaño y del algoritmo de adaptación
con el que se obtienen los valores óptimos de sus coeficientes. L a velocidad de convergencia
es altamente dependiente del algoritmo de adaptación empleado. En la mayoría de los casos,
una alta velocidad de convergencia implica mayor complejidad y viceversa, en ocasiones y
dependiendo de la aplicación se sacrifica velocidad por simplicidad.
En los últimos años se ha observado un importante interés en el estudio de alsredes neuronales
artificiales. En la última década se ha desarrollado un importante esfuerzo de investigación para
resolver diversos problemas con redes neuronales y filtros adaptables. El resurgimiento de l a s redes neuronales artificiales, [ 13, [7], [ 151, [ 161, [ 171, [78], [79] la posibilidad de construirlas con estructuras simples (como el predictor lineal adaptable) [8], así como su posible
realización en circuitos analógicos de alta integración son un reto tecnológico relevante.
La solución a problemas de frontera que se presentan en la realización de los filtros
adaptables analógicos ha sido uno de los motivos principales para desarrollar la investigación
cuyos resultados se presentan en ésta tesis. El desarrollo de las redes neuronales artificiales ha
empezado a dar respuesta a problemas que habían sido del ámbito exclusivo de los sistemas
biológicos, la solución encontrada a problemas de optimización como el de la ruta crítica del
vendedor [S]. La estimación de sistemas, l a estimación de variables, [ 161, l a eliminación de ruido en señales de audio o imágenes [ 161, la clasificación o estimación de formas [ 131, [ 141,
11 61, [?O], permiten afirmar que las aplicaciones de las redes adaptivas. crecerán de manera importanteencamposcomo: [l], [2], [9], Ell], [12], [15], [16], [I71
l . -La predicción lineal
2.- Predicción adaptiva
3.- Identificación de sistemas
4.- Cancelación de ruido.
5.- Igualación de canales de comunicación
6.- Reconocimiento y clasificación de patrones.
7.- Telefonía móvil.
1.2 Compresión de señales de audio. La digitalización de l a voz ha permitido su
almacenamiento y manejo como dato con todas las consecuencias que ello implica. L a
transmisión de voz en altas velocidades requiere mayores anchos de banda en el canal de
. comunicación [22], [23], por ello transmitir voz codificada a bajas y medias tasas de transmisión es deseable, sin embargo esto redunda en menor cantidad de información a
transmitir. La información debe ser recuperada con el menor error posible así como también
con altos niveles de relación señal a ruido.
La compresión de señales de voz es una alternativa de solución a este problema [23], pues
permite transmitir la información codificada a menor velocidad (bits por segundo). De ésta
forma es posible transmitir más información con el mismo ancho de banda. Los códigos
predictores lineales por excitación de código (Code Excited Linear Prediction
CELP)
[45]producen buenos resultados en sistemas de transmisión de media y baja velocidad. Esta técnica
está basada en l a definición de diccionarios de código (codebook) tanto en el sistema de
transmisión como en el de recepción. La señal que se transmite se comprime enviando sólo los
coeficientes del predictor y el índice del código que más se asemeja al error de predicción. AI
recibirse el vector correspondiente al índice transmitido se hace pasar por el inverso del
predictor para sintetizar la señal deseada. Los sistemas que se han desarrollado efectúan la
predicción con base en los esquemas de predicción lineal digitales. En estos esquemas, la
señal de voz es modelada como u n proceso gaussiano con variaciones lentas del espectro de
frecuencia. L a complejidad [23] del sistema predictivo es función de la cantidad de muestras
por segundo que se procesan. La compresión de señales, a medida que tienen mayor contenido
de frecuencia , requiere de mayor tiempo de procesamiento para lograr la convergencia del
predictor.
Lo5 c\qucnus desarrollados hasta este momento se basan en libros de código, encontrar
algorltmos m i s eficientes de búsqueda. como la búsqueda estocástica son temas de estudio.
El
proceso de comparación emplea funciones de búsqueda y estimación que aumentan lacomple.)idad de cómputo. Por ello se han propuesto codificaciones derivadas de los códigos
blnarios correctores de error para lograr abatir los tiempos de procesamiento. Los trabajos de
investigación que se realizan en este campo basan su que hacer en la determinación de mejores
codificadores y de filtros adaptables más rápidos. En los codificadores del tipo CELP la señal
de excitación es un vector cuantificado de manera estocástica; se usan dos filtros: uno de
retardo largo que da la estructura fina del espectro de frecuencias de la señal de voz, y uno de
retardo corto que agrega al anterior las características de resonancia.
Los parámetros del filtro son estimados en esencia por filtros predictores lineales. L a
estimación del codificador se hace básicamente estimando el error cuadrático medio entre dos
señales, la señal a estimar y la señal deseada. Ambos procesos se repiten para cada valor
establecido en el libro de códigos y para ventanas de señal del orden de 5 milisegundos.
Las algoritmos desarrollados al respecto resuelven la predicción o estimación de las señales en
procesadores digitales
DSP.
Sin embargo hemos podido demostrar que la compresión deseñales de audio es factible usando predictores analógicos [51]. Esta alternativa tiene importantes posibilidades de ser explotada en aplicaciones que requieren almacenar grandes
volúmenes de voz, en el correo electrónico de voz y el encriptamiento de información. La
búsqueda de soluciones al procesamiento en tiempo real será más demandada en el futuro
cercano. El audio y el video digital de alta definición obligan a manejar volúmenes de
información que deben procesarse en tiempo real en aplicaciones del rimbito del
entretenimiento. En la medida en la que los tiempos de procesamiento se acorten y la
complejidad de los sistemas se haga menor será posible que éstas y otras aplicaciones tengan
\,iabilidad tecnológica.
La compresión y descompresión de voz en línea mediante nuevas soluciones que reduzcan l o 5
[lempo\ de cómputo y simplifiquen las arquitecturas usadas, es investigación de frontera. Ea ncc'c~ar~o encontrar nuevas estructuras que resuelvan los problemas de compresión y
debcomprcsión de voz y audio en sistemas de alta fidelidad, en los que la frecuencia de
muestre0 debe ser alta lo que implica altos costos de cómputo.
El filtrado adaptable analógico con tiempos de procesamiento en tiempo real es una alternativa
en la que se sustentará el desarrollo futuro de muchas aplicaciones, probablemente las mis apremiantes son l a s relacionadas con la telefonía a manos libres, la ecualización de canales de
comunicación de variación rápida, el almacenamiento y transmisión de señales de voz y audio
y video de alta definición.
1.3 Eliminación de interferencias
La recuperación o restauración de imágenes que han pasado por procesos donde se les ha
agregado ruido es un campo de investigación con retos y oportunidades, donde persisten aún
problemas no resueltos. Dentro de estos es importante el tiempo de cómputo requerido para
el procesamiento de imágenes y los grandes volúmenes de memoria requeridos. En los últimos
veinte años se han propuesto diversas alternativas para la restauración de imágenes; soluciones
que involucran el empleo de filtros adaptables tales como: El filtro de inversión, el filtro de
Wiener (Andrews y Hunt en 1971), el filtro de Kalman (Woods & Ingle en 1981), y otras muchas propuestas que sugieren soluciones para reducir la complejidad de los algoritmos y
sistemas buscando fundamentalmente mayor precisión con menor costo de cómputo.
Los resultados encontrados en el filtro de inversión demuestran que funciona adecuadamente
para imágenes con altos niveles de relación señal a ruido, el filtro de Wiener trabaja bajo la
consideración de imágenes modeladas como procesos estacionarios en el sentido amplio. El
filtros de Kalman es posible usarlo en procesos no estacionarios, sin embargo el esfuerzo de
cómputo crece de manera importante debido a que se requiere realizar un proceso de inversión
de matrices al calcular las funciones de autocorrelación y correlación cruzada. El procesamiento de imigenes modeladas como procesos no estacionarios con tiempos de
ccimpuro razonables es u n problema de frontera. La video conferencia espera soluciones para
codificar y decodificar l a información con los menores requerimientos de ancho de banda. En
lab Irnigenes consideradas como estacionarias, las más simples en términos de su patrón o
estadística se requieren soluciones que permitan su procesamiento a mayores velocidades. La
compresión de imrigenes es posible realizarla mediante filtrado analógico. Una estrategia que
deber6 explorarse es l a de conformar vectores que representen altos niveles de correlación
entre un cuadro y el siguiente. La tecnología
CMOS
permite frecuencias de corte que confacilidad hasta los 100 Mhz. Mediante esta tecnología será posible realizar la predicción de imágenes a partir de la función de error con filtros adaptables transversales. LA posibilidad de
realizar el entrenamiento del filtro con algoritmos analógicos es un campo de investigación
importante. Los resultados encontrados en esta tesis permiten prever aplicaciones incluso en
el campo de compresión de imágenes.
La determinación de mejores modelos que representen la información de imágenes, junto con
el desarrollo de algoritmos que reduzcan el tiempo de procesamiento ó la determinación de nuevas arquitecturas que distribuyan la tarea de cómputo entre varios procesadores, son temas
de investigación de frontera. El procesamiento digital de señales se dificulta a mediada que se
incrementa la frecuencia de muestreo. El procesamiento analógico de señales tendrá un
importante desarrollo en los próximos años, en la medida que la tecnología brinde soluciones
económicas y de muy alta integración para realizar procesamiento analógico de señales. La
estimación de señales de video puede realizarse en tiempo real si se tienen los filtros adaptables
analógicos que estiman el ruido o alsseñales de video deseadas.
El procesamiento analógico de señales requiere de la construcción de una teoría amplia y
desarrollada que permita el diseño metodológico de filtros adaptables analógicos con los que
se resuelvan los algoritmos necesarios para el reconocimiento de los patrones de video y la
elimlnación de interferencias en tiempo real.
1.4 Cancelación de eco.
En los sistema$ do cancelación de eco la estimación del ruido de eco que se produce en el canal
dc comunicación se realiza mediante filtros adaptables que estiman el ruido de eco con filtros
FIR transversales. programados en procesadores digitales (DSP). La bibliografía conocida
mbre cancelación de eco propone soluciones con canceladores de eco digitales,
[18],[29],[30],[3 1],[32],[33]. En esta tesis se aborda el problema de l a cancelación de eco en
presencia de doble parlante. Se proponen nuevos algoritmos que mejoran el procesamiento de
los canceladores digitales y se propone la cancelación de eco con control de convergencia
variante en tiempo para filtros adaptables analógicos como dgitales. Desarrollar nuevas
estructuras tanto analógicas como digitales, a s í como los algoritmos que reduzcan la
complejidad de cómputo logrando la más alta velocidad de convergencia en la estimación
fueron motivaciones importantes de la investigación doctoral.
El desarrollo de la microelectrónica permite observar diferencias importantes con relación a
lo que era posible en el pasado, y lo que será en el futuro. En un cuarto de siglo se ha pasado de niveles de integración de cientos de transistores a niveles de integración del orden de
decenas de millones de transistores.
El microprocesador es probablemente el desarrollo más importante de la tecnología digital.
El desarrollo del transistor
MOS,
su relativa facilidad de construcción y las herramientas dediseño, en particular el diseño asistido por computadora, impulsan la investigación de
soluciones nuevas o alternativas. Así, la realización de circuitos analógicos que proponen
soluciones a problemas que habían sido abordados tradicionalmente por procesadores digitales,
son u n campo de desarrollo en la electrónica analógica.
1.5 Filtrado analógico y redes neuronales
En 1989 Carver Mead [9] hacía ver la característica del trabajo masivamente paralelizado de
las redes neuronales y demostraba lo adecuado de la puesta en marcha de redes neuronales consrruidas con tecnología VLSI. Las distancias entre la integración de las redes neuronales
biológicas y las redes neuronales artificiales estin en ordenes de magnitud astronómicas. Los
prlmeros esfuerzos de construcción de estructuras básicas de neuronas artificiales en silicio
aparecen en 1988 [ I ] , [9]. Con ello se dan los primeros pasos en la construcción de sistemas inteligentes artificiales masivamente parelelizados. Cada neurona trabajará como u n procesador
elemental.
El desarrollo de diversos algoritmos en arquitecturas de redes neuronales construidas en
circuito integrados [ 181, [ 191,
[ZO],
[ZI], [25] muestran el gran interés despertado en la última década para llegar a construir sistemas artificiales que trabajen en paralelo con un gran numerode interconexiones, de manera análoga a como sucede en la arquitectura del cerebro de los
seres vivos. Las distancias entre la integración de neuronas, número de interconexiones entre estas, consumo de energía, eficiencia de alssoluciones entre l a s redes neuronales biológicos y las redes neuronales artificiales es inconmensurable. Sin embargo los resultados obtenidos
con modestas redes neuronales adaptables como alsde Hopfield, Witdrow, Hamming o Grossberg inidcan que los primeros pasos en la búsqueda a soluciones de identificación de
patrones con redes inteligentes ha iniciado un camino de desarrollo científico y tecnológico
que será sin duda de enorme trascendencia en el futuro cercano.
La construcción de soluciones mediante redes adaptabas se desarrolla básicamente en dos
vertientes:
a). Sistemas neuronales. La tecnología que busca arquitecturas con nuevas estructuras,
muy probablemente masivamente paralelizadas y construidas con tecnologías de alta
integración analógica (CMOS- VLSI Analog Design) que sean eficientes en términos de alta
integración. modularidad , portabilidad de las aplicaciones, altos niveles de conectividad (redes
de neuronas celulares), requerimientos de velocidad de procesamiento en tiempo real, bajo
consumo de energía y polarización a bajo voltaje. [ I ] , [2], [ 9 ] , [ 1 I ] , [ 121, [ 151, [ 161. [ 171
El desarrollo de l a tecnología en la fabricación de C.I. y l a s facilidades del diseño asistido por
computadora hace viable el diseño de arquitecturas de filtros adaptables o redes neuronales que
wan t'abncados posteriormente, en procesos donde el diseñador no interviene en el proceso de
fabrlcacion del circuito integrado (CI) [ I ] ,
b ) . Computacional. El estudio y desarrollo de soluciones nuevas a problemas de
estimación. predicción y ruido para adaptar los algoritmos digitales conocidos y otros más que
se dt.\arrolIan día a día para ser transportados al silicio. El concepto de algoritmos
desarrollados para silicio esta teniendo una gran aceptación
La búsqueda de nuevas propuestas para la solución en silicio de diversos algoritmos [ 1 S],
[ 19],[20],[21], o para resolver ecuaciones diferenciales en modo de corriente [25] empiezan a brindar soluciones en tiempo real
Los retos que se presentan en la realización de redes analógicas adaptables son grandes. Se
requieren circuitos integrados que modelen sistemas complejos. [I], [7], [ 10],[2 I ] , [26],[45],[46],[48]. Los sistemas complejos presentan una gama de intereses muy grande, por
ejemplo encontramos desde la complejidad de los sistemas de reconocimiento de patrones que
realizan funciones de visión artificial o en general de toma de decisiones inteligentes, hasta el
modelado de sistemas de ecuaciones diferenciales o de diferencia lineales y no lineales que
realicen funciones de suma, producto, división, integración, etc. La realización de estas
funciones ha sido estudiada desde los orígenes de la computación analógica, persistiendo
problemas muy importantes. Los problemas que se presentan en la realización de filtros
adaptables analógicos son analizados en esta tesis proponiendo alternativas de solución.
De entre los problemas mas significativos en el filtrado analógico adaptable se identifica la
necesidad de llevar al mínimo l a s diferencias entre las soluciones que se obtienen con lógica
programada. En ésta, los operadores matemáticos simbólicos tienen grados de precisión
conocidos. este conocimiento se sustenta en una amplia teoría de los métodos numéricos. En
el CLSO de los bloques analógicos que realizan las funciones matemáticas y l a solución de los
algoritmos de adaptación, la situación no es tan clara. El análisis de los errores que
Introducen los bloques funcionales básicos en los filtros adaptables analógicos
cmulrlplicadores. sumadores e integradores) con los que se intenta construirlos es una
dlwIpl1n;l que b e está construyendo. La literatura en este campo no reporta anilisis abundante
de los efectos de los dispositivos en el filtrado adaptable analógico. Probablemente los
esfuerzos m i s importante reportado al respecto son los de Ayal Shoval [75] en el análisis
del efecto del offset en el algoritmo LMS y la propuesta de C.P.J. TZENG en [SI) para
cancel;lr el offset del filtro adaptable mediante otro un filtro adaptable
El Artículo de Bernard Widrow “30 Years of Adaptive Neural Networks” [8], publicado en
1990, da una visión muy importante del concepto de la neurona artificial como elemento básico
de l a s redes neuronales y su desarrollo en los últimos treinta años. Si el artículo se publicase
en este momento, me parece que seguiría siendo vigente. Esta vigencia estriba en que la
ADALINE como elemento básico de las estructuras neuronales artificiales es seguramente la
más sencilla dentro de la categoría de l a s que son capaces de aprender.
La
ADALINE, comoel elemento celular básico de estructuras neuronales, se estudia desde hace más de cuarenta
años. No obstante la sencillez de su modelo, se ha tenido que realizar un esfuerzo de
investigación significativo para arrancarle los secretos que conduzcan a su realización física.
La investigación realizada en este trabajo se centra en el análisis y la propuesta de soluciones
para la construcción de la célula de la red neuronal, es decir el ámbito de interés de esta tesis
esta enfocado al análisis del filtro adaptable transversal con el algoritmo de aprendizaje LMS
analógico.
1.6 ANTECENTES TRASCENDENTES QUE DAN ORÍGEN A LA INVESTIGACIóN
REALIZADA
En la realización de esta investigación debo reconocer la influencia de importantes trabajos
antenores en los que se sustentó la investigación realizada:
S i n duda los trabajos realizados por Norman Wiener constituyen l a piedra de toque en el
desarrollo del filtrado adaptable. La influencia de l a s ideas de Wiener fueron recogidas por uno
dc \us alumnos. Y. W. Lee, quien escribe en 1960 u n libro que ahora es ya u n clásico, The
Stattsrical Theory of Communications. Este excelente libro tiene en mi opinión al menos dos peculiaridades: una de ellas consiste en que no tiene una sola referencia en sus 501 priginas,
la oIra consiste en que la solución tecnológica a los problemas de síntesis que propone siguen
siendo vigentes. Estos problemas relacionados con la realización de sistemas ideales (filtros
pasa-rodo) se analizan en el capítulo tres de esta tesis.
En los últimos dos capítulos del libro de Y. W. Lee se desarrolla una importante propuesta
de síntesis de filtros analógicos adaptables, con estructuras polinomiales de Laguerre,
Legendre y síntesis por Fourier.
Las
dificultades para su realización están en dos direcciones: la primera es la realización de una estructura analógica VLSI que resuelva el algoritmo de aprendizaje propuesto por Y. W Lee, y la segunda es la realización de una línea de retardo,preferentemente analógica, que cumpla con las condiciones de ortogonalidad impuestas. Se
deben cumplir las condiciones de ortogonalidad de los polinomios de Laguerre. y con las
estructuras que Lee propone se requiere además que la síntesis sea físicamente realizable, este
compromiso no es trivial. El capítulo 3 de esta tesis presenta la discusión y alternativas de
solución cuando se emplea la línea de retardo analógica no ideal cuya respuesta impulsiva es
una aproximación de la base de funciones ortogonales propuestas por Lee. En esta tesis se hace
u n análisis comparativo entre los filtros Gamma y los filtros de Laguene. Conocer las
variables que limitan la realización de filtros adaptables analógicos ortogonales (Gamma y
Laperre) [36], [46],[47],[48],[52],[53],[55] así como proponer soluciones para su realización
en silicio. son resultados de la investigación que se presenta en esta tesis que considero
importantes.
El articulo de Bernard Widrow. "30 Years of adaptive neural networks " [8], así como el
seminario que impartió el
Dr.
Edzar Sinchez-Sinencio en 1993 en la U A M sobre rede5.neuronales. me produjeron una motivación muy importante para abordar l a investigación dc c6mo construir una red neuronal adaptable con tecnología VLSI
La in\.cstIgacii)n realizada tiene u n a muy importante influencia del traba.jo de investigacihn
dc m 1 ;lwwr. el
Dr.
Hector Pérez Meana. ElDr.
Perez Meana realiza su investigación doctoral en problemas de cancelación de eco y filtros ortogonales [36], [37],[38]. La propuesta de in\,estl_ración doctoral de Pérez Meana demuestra las ventajas de los filtros ortogonales.analiza 105 filtros de Legendre y desarrolla a partir de los trabajos del Prof. Sondi, pionero
en trabajos de cancelación de eco, las primeras propuestas de adaptación para cancelación de
eco en presencia del interlocutor cercano [29]., [30], [3 11, [32].
A partir de los trabajos de Pérez Meana y bajo su dirección, en esta tesis se reporta la
investigación en filtrado adaptable continuo, proponiendo alsaportaciones que se indican a continuación..
1.7
APORTACIONES
AL ESTADO DELARTE
1.7.1.
ALGORITMOS
DE CONVERGENCIADE
PASO VARIABLE Se aportantres algoritmos que hacen más eficiente el proceso de convergencia en la estimación de los
coeficientes del filtro. De estos, dos son de paso variable discretos, y uno de paso variable continuo para filtrado analógico. Los de paso variable sonTVS-LMS 1 y TVS-LMS2 y el de
paso continuo se desarrolla en el capítulo cinco en su primera versión y en el capitulo 6 en su
segunda versión
El TVS-LMS 1 [39] es aportación del autor, la segunda es consecuencia de ésta y se denomina como TVS-LMS2 [65]. Esta segunda propuesta TVS-LMS2 es un trabajo conjunto realizado
con la Dra. Mariko Nakano Miyatake [65], [78], y bajo la dirección del
Dr.
Hector PerezMeana. Los algoritmos TVS-LMS 1 y TVS-LMS2 se comparan en el capítulo cuatro. Ambos algoritmos se desarrollan en el campo discreto. No obstante su robustez y ventajas con
respecto a otros. no pueden ser transportados al campo analógico dado que requieren del
anlilisis y toma de decisiones lógicas excluyentes, lo que da como resultado el desarrollo del
al_goritmo presentado en el capitulo cinco, el cual se desarrolla a partir del TVS-LMS l .
La realización del algoritmo LMS en su versión analógica, como una estructura modular, es
u n a aportación de esta investigación. Se propone una estructura analógica VLSI para
encontrar el paso óptimo del factor de convergencia en un filtro analógico. El desarrollo se
puede encontrar en los capítulos cinco y seis.
1.7.2 ALGORITMO DE PASO VARIABLE PARA FILTRADO ANALÓGICO
Y C A N C E L A C I ~ N DE ECO MEDIANTE ESTRUCTURAS A N A L ~ G I C A S . EI
algoritmo de búsqueda de gradiente, como el
LMS,
que estime los valores de los coeficienteso pesos de una red neuronal analógica o del filtro adaptable, es un mecanismo de aprendizaje
que se ha empleado por diversos investigadores [47], [48], [49]. Sin embargo, los resultados reportados en la literatura no son fácilmente reproducibles. Uno de los problemas que se
presenta es que cada uno de las soluciones se orientaba a alguna aplicación en particular [47],
[72],[73] o son tan generales que no se podían aplicar a resolver problemas donde la tecnología digital había mostrado ya avances importantes, como es el caso de la cancelación
de eco [47], [62], [65].
Con la tecnología digital actual, y no obstante el avance de los canceladores de eco acústico
digitales, éstos realizan la cancelación fuera de línea en órdenes de magnitud de varios cientos
de milisegundos, dependiendo del número de retardos y de la velocidad del DSP. El reto
consistía en bajar los tiempos de cancelación de eco a tiempo real, para aplicaciones de
telefonía celular o eco acústico se requieren órdenes de magnitud de microsegundos, dado
que, son los tiempos que ofrece la tecnología CMOS. Hasta antes de las dos últimas
publicaciones que produjeron esta investigación [76], [77] no existían reportes biblio_grSficos de cómo controlar el factor de convergencia y estabilidad del algoritmo
L M S
en estructurasanal6glcas. El concepto de paso variable "analógico, o adaptable" no se había aplicado en el
anilisis de la velocidad de convergencia y estabilidad para la estimación de coeficientes del
filtro. El paso variable es una solución que ha demostrado ser muy eficiente en la cancelación
del ruido de eco así como en estimar la señal del interlocutor cercano [ 3 9 ] , [40]. [ M ] , [78].
[791.
1.7.3 REFORMULACION DEL ALGORITMO LMS
- El concepto de adaptabilidad que permite estudiar a las redes neuronales con la teoría de los filtros adaptables es el de ver al aprendizaje como la estimación de los coeficientes de u n filtro
adaptable de orden N, 181, [36]. El aprendizaje es la manera en la que la red adaptable cambia.
se adapta en función de las variables de entrada para realizar una función de estimación,
identificación ó eliminación de interferencia [ 11, [7] ,[12]. La realización analógica de algoritmos de aprendizaje presenta diversas dificultades: Una de ellas consiste en que los
algoritmos desarrollados para al efecto se han pensado para programarse en procesadores
digitales, [8] su traslado a sistemas analógicos no es trivial. Se requirió incluso de replantear
el algoritmo de aprendizaje para su realización en estructuras analÓgicas[76].
La reformulación del algoritmo LMS que se propone en el último capitulo de esta tesis es una
aportación que considero fundamental. L a reformulación se hace a partir del análisis de convergencia del algoritmo cuando el integrador es un sistema real. El resultado encontrado
se presenta en el capítulo cinco y se propone un factor de corrección. Sin embargo, se buscó
encontrar l a solución de fondo al problema restando en la estructura analógica del LMS el
error que introducía el polo del integrador. Se propone una nueva estructura de un “integrador
casi ideal “. Este integrador elimina los problemas de convergencia que produce l a posición del polo de los integradores reales mediante una estructura de u n integrador casi ideal que se
construye con filtros pasa-bajos reales.
Los efectos de la posición del polo en el integrador analógico no eran conocidos hasta la
publlcación de [ 7 5 ] y [76]. La propuesta de solución a los problemas del integrador es una
aportación de este trabajo al campo de los filtros continuos en general. Los problemas de
apronlmación por integración no ideal se presentan también en el diseño de filtros a
capacltores conmutados y en l a teoría de los filtros continuos. [67]. Los resultados
encontrados se originan en el análisis de convergencia del algoritmo LMS con una integración
Imperfecta. l a cual es modelada con un filtro pasa-bajas. El analisis de la convergencia del algoritmo LMS considerando la integración con integradores reales no había sido hecha antes.
Este desarrollo del problema de la convergencia en integradores reales se presenta en el
. capítulo cinco y en detalle en el apéndice. La reformulación propuesta es importante no sólo porque a partir de ella [77] se controla el efecto del polo en la estimación, sino porque,
además, se propone un nuevo integrador analógico. La estructura del integrador es novedosa
y puede ser empleada con ventaja no sólo en filtrado adaptable, sino en aplicaciones de filtros
continuos y de capacitores conmutados.
1.7.4. ESTRUCTURA VLSI A N A L ~ G I C A PARA EL ALGORITMO DE PASO
VARIABLE NORMALIZADO NLMS.
La propuesta de un algoritmo analógico de paso variable continuo para canceladores analógicos
es una aportación al estado del arte en cancelación de eco. Se puede afirmar que hasta la
aparición de las publicaciones [76] y [77], la idea de cancelación de eco con control de
convergencia y estabilidad de paso variable en tiempo real no se conocía. No obstante que el
paso variable en tiempo fue desarrollado para un cancelador analógico, los resultados
demuestran que es u n muy buen algoritmo que puede emplearse con ventaja también en
canceladores digitales.
El factor de convergencia propuesto reduce la degradación del sistema en canceladores. La
idea fue desarrollada fundamentalmente para ser usada en filtros adaptables analógicos.
buscando encontrar una expresión para el factor de convergencia que pudiera ser realizable en
una estructura VLSI analógica.
1.7.5 CORRECCION DEL OFFSET.
L a tclet'onía a larga distancia, a manos libres, video confere ncia y la ecualizació In de canales
de comunlcaci6n de variación rápida requiere tiempos de identificación en tiempo real. alto
grado dc Integración del cancelador (VLSI) y muy bajo consumo de potencia (se requiere de
los voltaJes mínimos posibles, actualmente se dispone de pilas de 2.5 volts con alto
rendimlento de energía para aplicaciones en móviles). Los efectos de l a s imperfecciones de
los clrcullos integradores con los que se diseña el filtro adaptable, línea de retardo, los
integradores. y multiplicadores eran desconocidos hasta la publicación de las referencias [76]
y [77] del autor. El efecto del offset en el algoritmo LMS :;e había reportado en un excelente
artículo en 1995 por Ayal Shoval [75]. Sin embargo, l a investigación realizada por Ayal Schoval se refería a los efectos del offset cuando el factor de convergencia es una constante (no
obstante que el análisis se presenta para diferentes valores del factor de convergencia). Se
requería conocer con mayor precisión las restricciones que enfrentaría el circuito integrado debido al offset. La investigación realizada demuestra que los efectos del offset producidos por
la línea de retardo, los multiplicadores y los sumadores del filtro adaptable, se eliminan con un factor de convergencia de variación en el tiempo como se propone en el capítulo cinco de esta
tesis. El efecto del offset del integrador es un problema a resolver.
Se analiza el efecto del ruido aditivo en el filtro analógico, proponiendo un modelo
simplificado al que se le introduce el efecto del offset de dc. Se demuestra que la suma del
ruido aditivo y el offset de dc en el retardo, multiplicadores y sumadores son suprimidos
mediante el algoritmo de paso continuo para control de convergencia que se propone. Se
analizan las dificultades que presenta el offset del integrador
Se demuestra también que el algoritmo de paso variable tiene un efecto que elimina la
distorsión que se introduce por el ruido aditivo que se genera en los circuitos integrados VLSI. Como se puede observar en el capitulo cinco, el efecto del offset se puede reducir
significativamente si se selecciona un valor apropiado del factor de convergencia. De acuerdo
;f l a ecuación (5.54), concluimos que el algoritmo variante en tiempo de paso variable tiene u n
efecto que elimina la distorsión que introduce el offset, excepto el del integrador, y el ruido
ad1tii.o del circuito VLSI.
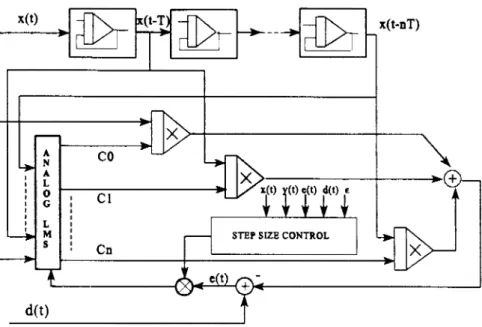
1.7.6 ESTRUCTURA MODULAR DEL FILTRO ADAPTIVO. Los filtros
Adaptables analógicos han sido propuestos hasta antes de las publicaciones[76], [ 7 7 ] como
filtros de propósito dedicado. En esta tesis se propone la estructura de un filtro analógico
adaptable modular, donde cada uno de sus elementos básicos se conecta con los restantes. Los
módulos bisicos del filtro analógico están constituidos por:
1 .- La línea de retardo.
2.- El algoritmo de adaptación analógico LMS
3.- Los multiplicadores, sumadores e integradores
4.- El módulo de control de velocidad de convergencia ( algoritmo de paso variable).
La estructura modular utiliza el mismo elemento en la línea de retardo y los integradores. Los
efectos producidos por los circuitos de propósito general que lo constituyen permiten proponer el diseño de filtros adaptables analógicos con los circuitos integrados mencionados. si se
atiende a los requerimientos del factor de convergencia y del integrador propuesto. En los
capítulos cinco y seis se demuestra que es posible la realización de filtros adaptables con
circuitos integrados de propósito general.
1.8 AMBITO DE LA I N V E S T I G A C I ~ N REALIZADA
La investigación que se desarrolla en esta tesis propone la búsqueda de nuevos algoritmos de
baja complejidad y elevado desempeño que hagan reconocimiento de formas de onda y
eliminación de interferencia en sistemas digitales y sistemas analógicos. En esta tesis también
se analizan y proponen soluciones a las desviaciones que, en l a predicción de las señales deseadas, generan los efectos no deseados de los elementos con los que se construye al filtro
adaptable. La investigación realizada, además, propone algoritmos de paso variable y variación
continua para cancelación de interferencias en aplicaciones de cancelación de eco. La
investigación realizada propone el control de convergencia del algoritmo LMS tanto para
estructuras discretas, como su contraparte en estructuras analógicas. Se proponen estructuras
modulares flexibles, éstas se pueda emplear en: predicción, eliminación de interferencia,
cancelación de eco. ecualización de canales de comunicación y. en general, en cualquier
apllcaclón que requiera la predicción de una señal deseada.
1.9 ;IIETODOLOGIA.
La metodología seguida en l a realización de la investigación cuyos resultados se presentan en
esta te515 consiste en los siguientes pasos:
1 .- Investigación bibliográfica.
2.- Identificación precisa de los problemas de frontera que se podían atacar en la investigación
propuesta.
3.- Formulación de las hipótesis a partir de
l a s
cuales se pretendería resolver los problemas defrontera planteados en el capítulo uno.
4.- Prueba y medición del error entre la solución buscada y la encontrada. Comparación con
resultados disponibles en alspublicaciones relacionadas con la investigación en curso. 5.- Discusión sistemática de los puntos 3 y 4 con el Dr. Héctor Pérez Meana y el Dr. Edgar
Sánchez-Sinencio, asesores en la investigación doctoral.
6.- Publicación de resultados encontrados, previa autorización de los asesores de tesis, en
congresos internacionales de alto nivel a fin de someterlos a la discusión de especialistas en
el tema.
7.- Publicación de resultados en tres revistas de circulación internacional de arbitraje estricto.
1.10 O R G A N I Z A C I ~ N
DE
LA TESISEsta tesis esta organizada en seis capítulos y un apéndice. L o s capítulos son autocontenidos, de manera que pueden ser leidos en cualquier orden. Sin embargo se recomienda su lectura en
orden para aquellos lectores no especialistas en el campo.
El Capítulol.
La introducción presenta la motivación de la investigación doctoral, establece el entorno
general del estado del arte en el campo de la investigación doctoral. Se describe de manera
huxcinta el ámbito de la investigación realizada y se describe el contenido de cada capítulo.
El Capítulo 2
Desarrollo del Tema. Presenta una revisión de los filtros adaptables en tiempo continuo
Gama y Laguerre. Ambas estructuras han sido usadas con éxito en diversas aplicaciones; se muestran sus similitudes y diferencias más significativas. Se presentan resultados obtenidos
por s~mulac~ón los cuales validan los resultados teóricos presentados. El objetivo del Capítulo
2 es analuar el comportamiento de las estructuras sobre las cuales se desarrollan los
algoritmos de adaptación propuestos. Se analiza el comportamiento de la estructura de
Laguerre con filtros pasa-bajas.
El Capitulo 3.
Línea de retardo analógica. Analiza la línea de retardo analógica en el filtro transversal, se
discuten los problemas de realización de retardos construidos con sistemas cuya relación de
transferencia no es la de un filtro ideal. Se discute el efecto que produce el ancho de banda
finito de la línea de retardo en la predicción del filtro adaptable. Se establecen l a s condiciones
de diseño de la línea de retardo con amplificadores operacionales de transconductancia variable
OTA (operational transconductance amplifier). Se propone una nueva estructura de línea de
retardo con mas de un retardo entre coeficientes, se demuestra sus ventajas en relación al filtro transversal convencional siendo esta propuesta realizable con tecnología de filtros conmutados.
El Capítulo 4.
Algoritmo LMS de paso variable normalizado. Presenta los algoritmos de paso variable para
cancelación de eco en presencia del interlocutor cercano, las propuestas de control de
convergencia de paso variable presentadas en este capítulo son una parte fundamental de esta
tesis en virtud de los resultados encontrados. Se hace una comparación de dos algoritmos de
paso variable TVS-LMS1 y TVS-LMS2 propuestos y su comparación con los algoritmos de
paso variable conocidos.
El capítulo 5.
Estructura modular de un filtro adaptable analógico NMLMS. Se desarrolla la propuesta
de solución del algoritmo presentado en el capitulo anterior, se desarrolla la estructura de u n
filtro adaptable analógico modular, donde uno de los módulos realiza l a normalización. En esta
propuesta se destacan las siguientes líneas de investigación:
a.- L a propuesta de u n factor de convergencia analógico. El factor propuesto controla la
velocidad de convergencia y estabilidad del algoritmo de adaptación del filtro adaptable
analógico. La propuesta de u n factor de convergencia de paso variable no sólo es original en
cuanto a l a propuesta per-se del algoritmo, sino porque es también realizable en una estructura
analógica que actúa de manera externa a la estructura del filtro. El algoritmo de control de
convergencia analógico es realizable mediante estructuras VLSI (multiplicadores divisores)
b.- Se analiza el efecto de la integración en el algoritmo LMS cuando la integración se realiza
con un filtro pasa bajas como integrador. El efecto de la posición del polo del integrador afecta
la calidad de la predicción del filtro adaptable. Se analiza el efecto de distorsión sobre ]a
predicción. Se desarrolla un análisis detallado del factor de convergencia, mismo que se detalla
en el apéndice.
En este capítulo se encuentra la expresión que define el intervalo de valores para los cuales el
algoritmo converge cuando la integración no es ideal. Se propone un factor de correccíon que
compense el efecto del corrimiento del polo en el filtro pasa bajas que actúa como integrador.
c.- Se analiza el efecto del ruido aditivo en el filtro analógico. Proponiendo un modelo
simplificado al que se le introduce el efecto del offset de dc, se demuestra que l a suma del ruido aditivo y el offset de dc en el retardo, multiplicadores y sumadores son suprimidos
mediante el algoritmo de paso continuo propuesto. Se observan l a s dificultades que presenta
el offset del integrador
.
d.- Se propone la estructura del filtro adaptable modular. Dicha estructura permite la
realización de diversas aplicaciones en filtrado adaptable.
El capítulo 6.
Filtro continuo analógico
LMS
con integración del gradiente casi ideal. Se presenta unanueva formulación para el cálculo del gradiente en el algoritmo L M S . Esta se desarrolla a partir
de los resultados encontrados en el capítulo 5. A partir del análisis de convergencia del
algoritmo LMS con integrador no ideal, se propone la estructura de u n integrador casi ideal
para reducir el efecto del polo en del integrador. Se determina la función que debe restarse al
gradlente del algoritmo LMS convencional para hacerlo inmune a la posición del polo. Esta
propuesta es importante porque permite usar integradores en el circuito integrador del LMS.
La propuesta presentada en este capítulo mejora de manera importante la calidad de l a
estimación del algoritmo LMS analógico. Se presenta una segunda versión del paso variable
para filtrado adaptable continuo. AI finalizar el capitulo se presentan las conclusiones generales
de l a tesis.
CAPITULO 2
DESARROLLO DEL TEMA DE INVESTIGACION
FILTROS ADAPTIVOS CONTINUOS GAMMA Y LAGUERRE
Resumen. Durante los últimos años los filtros adaptables analógicos han despertado gran
interés debido a su reducido tamaño, bajo consumo de potencia, así como mayores
velocidades de convergencia. Estos filtros se construyen con base en los polinomios de
Laguerre o en un2 expansión exponencial. Las estructuras derivadas se éstos se conocen
como filtros de Laguerre y filtros Gamma respectivamente. Ambas estructuras han sido
usadas con éxito en diversas aplicaciones. [ 111, [ 121, [ 15],[23],[24]
Por su simpleza, el algoritmo de aprendizaje más empleado es el LMS (Least Mean Square)
o algoritmo de búsqueda del gradiente descendente [9], [IO], [13]. L a línea de retardo requerida en estos sistemas se forma con secciones de filtros ideales pasa todo, que en la
prictica pueden ser substituidos por un filtros pasa-bajas, cuya frecuencia de corte sea al
menos diez veces mayor que la frecuencia máxima de la señal a estimar. Aumentar l a
velocidad de convergencia. conservando l a estabilidad en el cálculo de los coeficientes del
filtro. es u n problema fundamental a resolver [ 131, [ 141. A manera de referencia se puede
decir que los tiempos de convergencia para canceladores de eco acústico con filtros
transversales digitales es del ordene de magnitud de cientos de milisegundos. La velocidad
de convergencia en los filtros digitales depende, en gran medida. de la frecuencia de
muchtreo J del número de retardos que se emplea. El número de retardos puede llegar hasta
qulnlcntoh en canceladores de eco acústico[20], [ E ] . Con la tecnología analógica se pueden
alcanzar velocidades de convergencia mayores que con la digital (con l a tecnología
digital actual se alcanzan tiempos de convergencia en ordenes de magnitud de
milisegundos. mientras que con tecnología analógica los tiempos de convergencia estin en
ordenes de magitud de microsegundos) [6]
En este capítulo se presenta un análisis de los filtro!; Gamma y Laguere, mostrando SUS
similitudes y diferencias más significativas. La estructura de Laguerre es mas robusta a
variaciones en los parámetros del sistema. La estructura Gamma ofrece una realización mas
sencilla, presentando características de convergencia similares a las de la estructura de
Laguerre. Se presenta, además, una revisión del algoritmo LMS de tiempo continuo,
destacando las condiciones que deben cumplirse para su adecuado funcionamiento. Se proporcionan resultados obtenidos por simulación, los cuales validan los resultados teóricos
presentados.
2.1. I N T R O D U C C I ~ N
Los filtros adaptables han sido objeto de amplia investigación durante las dos últimas
décadas, debido a su potencial en la solución de un gran número de problemas prácticos,
tales como: cancelación de eco en sistemas de comunicación, eliminación de ruido,
igualación de canales de comunicación; en control, medicina, exploración sismica, etc.
[~1,[71,[81,[111,[121,[131.
La mayoría de estas aplicaciones emplean estructuras FIR (Finite impulse Response) con
algoritmos de adaptación del tipo
L M S
o RLS (Recursive Least Squares). En los algoritmos LMS, la velocidad de convergencia es, en la mayoría de los casos baja. Presentado estosalgoritmos, una alta sensibilidad al ruido aditivo, lo cual limita su uso en algunas
aplicaciones. [4], [S] , [ 7 ] , [16]. Sin embargo su complejidad computacional es pequeña.
Por otro lado, el algoritmo
RLS
posé alta velocidad de convergencia inicial, y bajasensibilidad al ruido aditivo. Pero, su complejidad de cómputo es alta para muchas
aplicaciones. [ 161
No obstante que se han buscado alternativas para reducir la complejidad del algoritmo RLS
mediante propuestas que mejoran su comportamiento, tales como el algoritmo FTF (fast
rrcuzswrsal filler) o el
BFT
(Block transversal Jlter ), la complejidad computacional de&tos de ION multiplicaciones por periódo de muestreo. donde N es el número de retardos
del filtro. La complejidad computacional del algoritmo normalizado NLMS discreto es de
2 N multiplicaciones por período de muestreo. Es evidente, que el NLMS es más atractivo
que el RLS. sobre todo en aplicaciones donde el número de retardos es importante. En el
c a w cic la cancelación de eco acústico. el número de retardos es considerable como ya se
nw.nc.lon6 arriba [ ? I ] . [ X ] . Los filtros tipo RLS tienen ventajas sobre los NLMS en el
nianclo de señales no estacionarias. Esto puede ser importante para aplicaciones en las
cuales la señal de entrada no es estacionaria, o está correlacionada con el error de
predlcción. Sin embargo. los algoritmos RLS requieren u n procedimiento de inversión dc
matriz demanda u n tiempo de procesamiento significativo del orden de 7N'.
multiplicaciones y divisiones complejas por periodo de muestreo, esto, en el mejor de los
casos. Jnvertir la matriz con redes analrjgicas es un proceso no resuelto. [!7],[ 181. En
. . consecuencia, el empleo del NLMS analógico ofrece ventajas en relación al algoritmo RLS.
El precio que se paga al utilizar el NLMS, a cambio de sus bajos requerimientos de
cómputo, es la posible inestabilidad o altas velocidades de convergencia. Este problema se
debe la inexactitud con la que se selecciona el factor de convergencia. En esta tesis se
aborda esta problemática, proponiendo algoritmos para la mejor selección de dicho factor.
Se proponen alternativas en modo discreto y continuo.
Los filtros digitales requieren de un mayor número de cálculos por unidad de tiempo a
medida que la frecuencia de muestre0 se incrementa. Por otra parte estos filtros son de orden moderadamente alto. Con el fin de solucionar estos problemas se han propuesto
diversas estructuras tales como: el filtrado por sub-bandas, el filtrado en el dominio de la
frecuencia, filtrado de respuesta a impulso finita. Todas ellas con ciertas ventajas sobre los
filtros adaptable transversales (discretos) [24], [25,][26]. Sin embargo, estas soluciones, presentan aun limitaciones cuando son requeridos a manejar señales de alta frecuencia.
Además, en general su consumo de potencia es alto, lo que dificulta su uso en aplicaciones
de telefonía celular, por ejemplo. [ 101
Recientemente, el interés en los filtros adaptables analógicos ha aumentado debido,
principalmente, a que éstos son capaces de manejar en tiempo real señales de muy alta
frecuencia. El uso de la tecnología VLSI (very large sacafe integrarion) de ordenes de
intesración de una micra o menores reducen substancialmente el tamaño, y el consumo de
potencia de filtro. Los filtros analógicos ofrecen mayor velocidad de convergencia que sus
contraparte3 digitales. Estas ventajas permiten proponer soluciones en ambientes donde la
estimaci6n de la señal deseada varía rápidamente.[3], [ I 1],[23].
Brislcarnente dos estructuras han sido empleadas para la realización de filtros adaptables de
tlempo continuo. Una es la estructura basada en los polinomios de Laguerre, y la otra esta
basada en u n a cascada de filtros pasa bajas de primer orden, conocida como estructura
Gamma. Ambas estructuras tienen propiedades importantes, sin embargo, no han sido
investigadas a fondo de manera que se tengan criterios bien establecidos para seleccionar
una o la otra. En el caso de la estructura de Laguerre, es posible demostrar que, dado que
la expansión de la respuesta a impulso del sistema deseado esta términos de u n conjunto de
funciones ortogonales completo, la respuesta a impulso de cualquier sistema lineal no
ortogonal a éste, puede ser representada por una estructura de Laguerre. Teóricamente, l a
expansión requiere un número infinito de retardos, sin embargo, es posible lograr la
adaptaci6n con un número finito de éstos. Los resultados experimentales muestran que si el
orden N se escoge apropiadamente se obtienen resultados aceptables.[27], [28], [29], [30] Aunque el filtro Gamma no posé la propiedad de ser un filtro ortogonal, la estimación de l a
señal deseada es posible. La realización del filtro Gamma es mas sencilla que la del filtro
de Laguerre, lo que lo vuelve atractivo para la síntesis de filtros continuos en tiempo real
empleando tecnología VLSI. Con una adecuada selección de sus parámetros, el filtro Gamma proporciona características de convergencia similares a las de los filtros de
Laguerre, como se mostrará posteriormente.
Los Resultados obtenidos por simulación muestran que ambas estructuras son sensibles a l a
posición de los polos y ceros, sin embargo los resultados muestran que los filtros de
Laguerre son menos sensibles que los filtros Gamma, pudiendo representar en forma
adecuada l a mayoría de los sistemas de interés práctico. Por su parte los filtros Gamma
aunque son más sensibles a la posición del polo presentan una estructura mas sencilla que
los filtros de Laguerre, ésta está formada por una cascada de filtros pasa bajas de primer
orden.
Los resultados obtenidos por simulación muestran que las características de convergencia
de los filtros Gamma pueden llegar a ser muy similares a las obtenidas por medio de los
filtro4 de Laguerre. si el ancho de l a línea de retardo es al menos 10 veces mayor que el de
la heñal.
Se presenta además u n análisis del algoritmo LMS de tiempo continuo, comúnmente usado
para adaptar los coeficientes de estos filtros. En el proceso de estimación de los coeficientes
se requiere realizar l a función de integración. En este trabajo se hace énfasis en e] efecto que producirri la integración no ideal en el funcionamiento del algoritmo
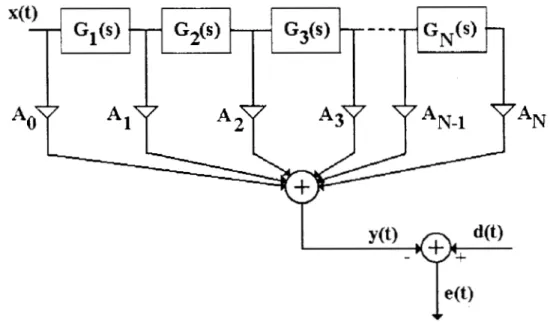
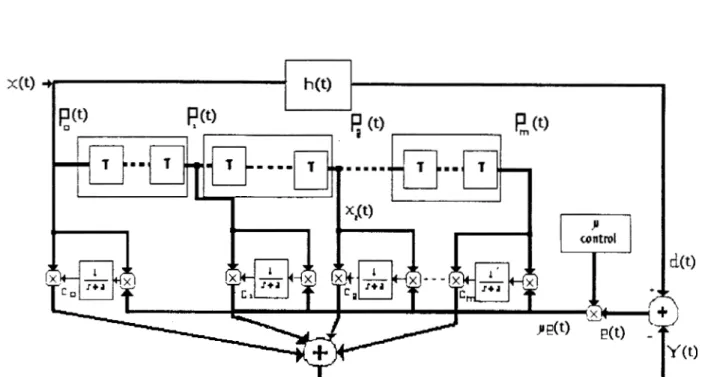
2.2. Estructuras para filtrado adaptable de tiempo continuo.
Considere la señal de salida del filtro transversal generalizado, mostrado en la figura 2.1,
cuya transformada de Laplace esta dada por:
donde GL(s) es la función de transferencia de la k-ésima etapa y X(s) es la transformada de
Laplace de la señal de entrada.
La selección que se haga de Gk(S) es fundamental en el funcionamiento y complejidad del
sistema. Esta selección dará lugar a estructuras adaptables con características de
convergencia y complejidad distintas.
Si G ~ ( s ) se selecciona como
Gk ( S ) = ~ S-a
s + a , k =2,3 ,..., N - 1
(2.2)
se obtiene el llamado filtro de Laguerre
Por otra parte el filtro Gamma constituye un filtro transversal generalizado, donde cada
etapa Gl;(s) es un filtro pasa-bajas
1 s + a
G ~ ( . s ) = ---, K = 1.2.3 ,..., N - 1 (2.3)
L a realización física de filtros pasa-todo presenta dificultades importantes, por lo cual los
filtros de Laguerre han sido poco empleados en el diseño de filtros adaptables continuos, en
contraste los filtros Gamma pueden ser construidos con base en modulos de filtros pasa-
bajas [ 5 ] . (61, [ IO], [ 1 1].[23].
La h i p i c n r e sección presenta una revisión de los filtros de Laguerre y filtros Gamma. Se
analiza su comportamiento conforme a la posición del los polos. Puesto que es imposible
construir filtros pasa-todo de primer orden. cuyo polo y cero estén en la misma posición.
se requiere analizar el comportamiento del filtro polos y ceros de valores diferentes.
2 . 3 Filtros de Laguerre
. Considere la Transformada de Laplace de la salida del filtro transversal generalizado mostrado en la figura 2. 1, la cual a partir de (2.2) y (2.3) esta dada por:
k = l
De donde la función de transferencia del sistema esta dada por:
(2.5)
A continuación considere la expansión en fracciones parciales de (2.6), ]a cual esta dada
Por
Tomando la transformada inversa de (2.7) obtenemos
N
k t m - 1h ( r )
=1
Ak Bm ~ exp(-at) k = I m = l ( m - I)!(2.8)
De donde se desprende que la respuesta a impulso de cada etapa, gk(t). esta dada por l a
suma de k exponenciales. [8].
2.1 Filtro Gamma
Considere l a transformada de Laplace de la señal de salida del filtro transversal p c r a l i z a d o mostrado en la figura 2.1. Procediendo de manera similar obtenemos la
Así la función de transferencia del filtro Gamma estarli dada por:
(2.9)
(2. I O )
Finalmente, tomado la transformada inversa de (2.10), obtenemos
(2.1 1)
Si comparamos la respuestas a impulso del filtro de Laguerre y Gamma dadas por las
ecuaciones (2.8) y (2.1 1) se observa que ambas se constituyen de funciones de expansión
de la misma función, es decir, de exponenciales de tipo tke-at. Cada filtro de Laguerre esta
formado por k filtros gamma, como se puede ver en las ecuación (2.8) y (2.11 ). En consecuencia se podría esperarse un mejor funcionamiento del filtro de Laguerre
comparado con el filtro Gamma.
Y
Figura 2.1 Filtro trasversal generalizado.
2.5 Algoritmo de Adaptación
Definimos el error de salida, e(t), como la diferencia entre la señal deseada y la respuesta
del filtro transversal adaptable mostrado en la figura 2.1
(2.12)
Donde x(t) es la señal de entrada del filtro transversal generalizado, hk(t) es la respuesta a
impulso de un sistema con función de transferencia dada por
(2.13)
y d(t) es la señal de referencia
La ecuación (2.12 ) representa al error de cualquier sistema transversal adaptable, por lo
pricticamente cualquier algoritmo de adaptación empleado para optimizar este tipo de
estructuras podría ser empleado para calcular los coeficientes del sistema mostrado en la
figura 2.1. Un algoritmo que ha probado ser eficiente en el cálculo de esos coeficientes es
el algoritmo LMS normalizado, dado por:
(2.14)
Para que Ah ( 0 tenga utilidad práctica deberá alcanzar u n valor constante después de u n
tiempo t
.
ese tiempo será el que tarde el filtro en llegar o converger a la solución deseada.El factor p de en la ecuación (2.14) controla la velocidad de convergencia y la estabilidad
del algoritmo. y
(2.15)
La ecuación (3.15) representa la salida de la k-esima etapa del filtro transversal definido
por la ecuación (2.1 )
2.6 Condiciones de Convergrmcia
. Con el fin de obtener las condiciorlcs de convergencia de (2.14) considere la derivada de Ak(t) con respecto al tiempo, dada por:
dAk
(l)= 2 p ( t ) x k ( f
dt (2.16)
donde e(t) esta dado por (2.12). Sustituyendo (2.12 ) en (2.16) y a partir de (2.1 ) se obtenemos:
(2.17)
calculando el valor esperado de (2.17) y reescribiendo el resultado en notación matricial
resulta:
(2.18)
donde
es el vector de correlación entre la señal de referencia y la señal de entrada, y
H=€IZi,r,X5r)] (2.20)
es l a matnz de autocorrelación de la señal de entrada, y finalmente
\ \
,,,,
= R -’
P (2.2 1 )trlr el vector de coeficientes óptimo. Asumiendo que K es una matriz ortonormal pueden
obtener los \falores propios de
R
Q = K R K T (2.22)
La ecuación (2.22)es una matriz diagonal cuyos valores hk son los valores propios de la
matriz de autocorrelación de la señal de entrada y K satisface la relación