TEOREMA DE DESARROLLO DE HEAVISIDE EN FRACCIONES PARCIALES
La técnica del desarrollo de fracciones parciales es establecida para cuidar todos los casos sistemáticamente.Hay 4 clases de problemas, dependiendo del denominador D(s): Caso 1: C(s) tiene polos reales de 1er orden.
Caso 2: C(s) tiene polos reales repetidos de primer orden.
Caso 3: C(s) tiene un par de polos complejos conjugados (un factor cuadrático en el denominador). Caso 4: C(s) tiene pares repetidos de polos complejos conjugados (un factor cuadrático repetido en el denominador).
CASO 1: POLOS REALES DE 1ER ORDEN.
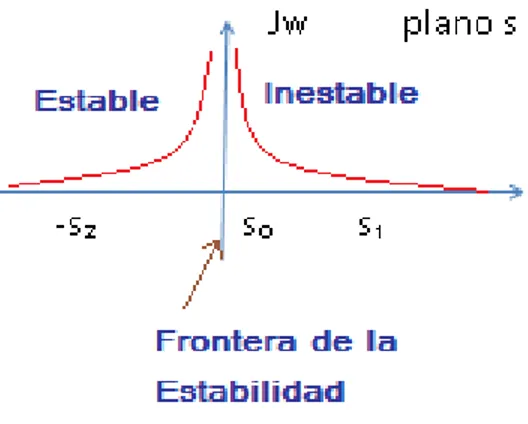
La posición de estos polos reales deC(s) en el plano s se muestra en la figura 1. Los polos pueden ser positivos ceros o negativos y ellos están situados en el eje real en el plano s. En este ejemplo
s₁
es positivo,s₀
es cero,s₂
es negativo. Para los polos mostrados en la figura 1, la transformada F(s) y sus fracciones parciales son:𝐶(𝑠) =𝑁(𝑠) 𝐷(𝑠)=
𝑁(𝑠) 𝑠 (𝑠 − 𝑠1) (𝑠 + 𝑠2)
𝐶(𝑠) = 𝐴0 𝑠 +
𝐴1 𝑠 − 𝑠1+
𝐴2
𝑠 + 𝑠2
X x x
Figura 1. Localización de los polos reales en el plano s
Hay tantas fracciones como hay factores en el denominador de C(s), ya que
s₀
=0, el factors-s₀
es escrito simplemente como s. la transformada inversa para C(s) es: 𝑐(𝑡) = 𝐴0+ 𝐴1𝑒𝑠1𝑡+ 𝐴2𝑒−𝑠2𝑡
Jw plano s
El polo
s₁
es positivo, por lo tanto el término 𝑨𝟏𝒆𝒔𝟏𝒕 es un incremento exponencial y elsistema es inestable. El polo
s₂
es negativo, y el término 𝑨𝟐𝒆−𝒔𝟐𝒕 es una caída exponencial convalor final de cero. Por lo tanto, para que un sistema sea estable, todos los polos reales que contribuyen a complementar la solución deben estar en la mitad izquierda del plano s.(ver figura 1A)
Figura 1A. Comportamiento de los polos: positivo y negativo.
Para evaluar un típico coeficiente 𝐴𝑘 , multiplicando ambos lados de la ecuación por el
factor (𝑠 − 𝑠𝑘) . El resultado es:
(𝑠 − 𝑠𝑘) 𝐶(𝑠) = (𝑠 − 𝑠𝑘)𝑁(𝑠) 𝐷(𝑠)= 𝐴1
𝑠 − 𝑠𝑘
𝑠 − 𝑠1+ 𝐴2 𝑠 − 𝑠𝑘
𝑠 − 𝑠2+ ⋯ + 𝐴𝑘+ ⋯ + 𝐴𝑣 𝑠 − 𝑠𝑘
𝑠 − 𝑠𝑣 La multiplicación del factor 𝑠 − 𝑠𝑘 sobre el lado izquierdo del a ecuación. Y el mismo factor
D(s) deberá dividirse fuera. Si 𝑠 = 𝑠𝑘, todos los términos en el lado derecho de la ecuación son
cero excepto 𝐴𝑘. Así, una regla general para evaluar las constantes para polos reales de orden
simple es:
𝐴
𝑘[(𝑠 − 𝑠
𝑘)
𝑁(𝑠)
𝐷(𝑠)
]
𝑠=𝑠𝑘= [
𝑁(𝑠)
𝐷
′(𝑠)
]
𝑠=𝑠𝑘Donde D’(s) es 𝑑𝐷(𝑠)𝑑𝑠 = (𝑠−𝑠𝑘)𝐷(𝑠) . Los coeficientes 𝐴𝑘 son llamados los residuos de C(s) de los
polos correspondientes. Para el caso de: 𝐶(𝑠) = 𝑠 + 2
𝑠(𝑠 + 1)(𝑠 + 3)= 𝐴0
𝑠 + 𝐴1 (𝑠 + 1)+
𝐴2 (𝑠 + 3)
Las constantes son:
𝐴0 = [𝑠 𝐶(𝑠)]𝑠=0= [ 𝑠 + 2
𝐴1= [(𝑠 + 1)𝐶(𝑠)]𝑠=−1= [ 𝑠 + 2
𝑠(𝑠 + 3)]𝑠=−1= − 1 2
𝐴2= [(𝑠 + 3)𝐶(𝑠)]𝑠=−3= [ 𝑠 + 2
𝑠(𝑠 + 1)]𝑠=−3= − 1 6
La solución de c(t) es: 𝒄(𝒕) =𝟐
𝟑− 𝒆−𝒕
𝟐 − 𝒆−𝟑𝒕
𝟔
CASO 2: POLOS REALES DE ORDEN MÚLTIPLE.
La posición de los polos reales de F(s), algunos de los cuales son repetidos, se muestra en la figura 2. El símbolo ]𝑟 es proyectado para indicar un polo de orden r.
X x 0
Figura 2. Localización de polos reales en el plano s.
Todos los polos reales están situados sobre el eje real del plano s. para los polos mostrados en la figura 2, la transformada de C(s) y sus fracciones parciales son:
𝐶(𝑠) =𝑁(𝑠) 𝐷(𝑠)=
𝑁(𝑠) (𝑠 − 𝑠1)3(𝑠 + 𝑠
2)
𝐶(𝑠) = 𝐴13 (𝑠 − 𝑠1)3+
𝐴12 (𝑠 − 𝑠1)2+
𝐴11 𝑠 − 𝑠1+
𝐴2
𝑠 + 𝑠2 El orden de D(s) en este caso es cuatro, y hay cuatro fracciones. Note que el polo múltiplo
s
, el cual es de orden 3, tiene resultados en tres fracciones en el lado derecho de la ecuación C(s). Para designar las constantes en las fracciones parciales, un solo subíndice es usado para un polo de primer orden. Para polos de orden múltiplo, una notación de doble subíndice es usada. El primer subíndice designa el polo, y el segundo subíndice designa el orden del polo en la fracción parcial. Los constantes asociados con los denominadores de primer orden en el desarrollo de lass₁ ]3 s₁
fracciones parciales son denominados residuos; por lo tanto únicamente las constantes 𝐴11 𝑦 𝐴2
son residuos de la ecuación C(s). La transformada inversa de C(s) es:
𝑐(𝑡) = 𝐴13𝑡2
2 𝑒𝑠1𝑡 + 𝐴12𝑡𝑒𝑠1𝑡+ 𝐴11𝑒𝑠1𝑡+ 𝐴2𝑒𝑠2𝑡 Como calcular las constantes del orden múltiplo:
Para la transformada general con raíces reales repetidas: 𝐶(𝑠) =𝑁(𝑠)
𝐷(𝑠)=
𝑁(𝑠)
(𝑠 − 𝑠𝑞)𝑟 (𝑠 + 𝑠1) …
𝐶(𝑠) = 𝐴𝑞𝑟 (𝑠 − 𝑠𝑞)𝑟+
𝐴𝑞(𝑟−1)
(𝑠 − 𝑠𝑞)(𝑟−1)+ ⋯ +
𝐴𝑞(𝑟−𝑘)
(𝑠 − 𝑠𝑞)(𝑟−𝑘)+ ⋯ +
𝐴𝑞1 𝑠 − 𝑠𝑞+
𝐴1
𝑠 − 𝑠1+ ⋯
La constante 𝐴𝑞𝑟 puede evaluarse simplemente, multiplicando ambos lados de la ecuación C(s)
por (𝑠 − 𝑠𝑞)𝑟 obtendremos:
(𝑠 − 𝑠𝑞)𝑟𝐶(𝑠) = (𝑠 − 𝑠 𝑞)𝑟
𝑁(𝑠) 𝐷(𝑠)=
𝑁(𝑠) (𝑠 − 𝑠1) …
= 𝐴𝑞𝑟+ 𝐴𝑞(𝑟−1)(𝑠 − 𝑠𝑞) + ⋯ + 𝐴𝑞1(𝑠 − 𝑠𝑞)𝑟−1+ 𝐴 1
(𝑠 − 𝑠𝑞)𝑟
𝑠 − 𝑠1 + ⋯ Nótese que el factor (𝑠 − 𝑠𝑞) es dividido fuera de la parte izquierda de la ecuación
Para 𝑠 = 𝑠𝑞 todos los términos en el lado derecho de la ecuación son ceros excepto para 𝐴𝑞𝑟 :
𝐴𝑞𝑟= [ (𝑠 − 𝑠𝑞)𝑟𝑁(𝑠)
𝐷(𝑠) ]𝑠=𝑠𝑞
La evaluación de 𝐴𝑞(𝑟−1) no puede realizarse en una manera similar. Multiplicando ambos
lados de la ecuación C(s) por (𝑠 − 𝑠𝑞)(𝑟−𝑘) y haciendo 𝑠 = 𝑠𝑞 resultando en ambos lados su
estado infinito, lo cual hace que 𝐴𝑞(𝑟−1) sea indeterminable.
Si el término 𝐴𝑞𝑟 queda eliminado en la ecuación (𝑠 − 𝑠𝑞)𝑟𝐶(𝑠), 𝐴𝑞(𝑟−1) puede
evaluarse. Así puede realizarse por diferenciación de la ecuación (𝑠 − 𝑠𝑞)𝑟𝐶(𝑠) con respecto a
s
:𝑑
𝑑𝑠[ (𝑠 − 𝑠𝑞)𝑟 𝑁(𝑠)
𝐷(𝑠)] = 𝐴𝑞(𝑟−1)+ 2𝐴𝑞(𝑟−2)(𝑠 − 𝑠𝑞) + ⋯ Haciendo 𝑠 = 𝑠𝑞 :
𝑑
Repitiendo la derivación obtenemos el coeficiente 𝐴𝑞(𝑟−𝑧)
𝐴𝑞(𝑟−𝑧)=1 2
𝑑2
𝑑𝑠2[ (𝑠 − 𝑠𝑞)𝑟
𝑁(𝑠)
𝐷(𝑠)]𝑠=𝑠𝑞 Este proceso puede repetirse hasta que cada constante sea determinada. Una fórmula general para descubrir esos coeficientes asociados con el polo real repetido de orden
r
, es:𝐴𝑞(𝑟−𝑘)= 1 𝑘!
𝑑𝑘
𝑑𝑠𝑘[ (𝑠 − 𝑠𝑞)𝑟
𝑁(𝑠)
𝐷(𝑠)]𝑠=𝑠𝑞
Para el caso de: 𝐶(𝑠) = 1
(𝑠 + 2)3(𝑠 + 3)=
𝐴13
(𝑠 + 2)3+
𝐴12
(𝑠 + 2)2+
𝐴11
𝑠 + 2+ 𝐴2
𝑠 + 3
Las constantes son:
𝐴13= [ (𝑠 + 2)3𝐶(𝑠)]
𝑠=−2= [
1
𝑠 + 3]𝑠=−2 = 1
𝐴12= 𝑑
𝑑𝑠[ (𝑠 + 2)3𝐶(𝑠)]𝑠=−2= 𝑑 𝑑𝑠[
1
𝑠 + 3]𝑠=−2= [ −(1)1 (𝑠 + 3)2]
𝑠=−2
= −1
𝐴
11=
1
2!
𝑑
2𝑑𝑠
2[(𝑠 + 2)
3𝐶(𝑠)]
𝑠=−2=
1
2
𝑑
2𝑑𝑠
2[
1
𝑠 + 3
]
𝑠=−2=
1
2
𝑑
𝑑𝑠
[
−(1)1
(𝑠 + 3)
2]
𝑠=−2
=
𝐴
11=
12[
+1(2)(𝑠+3)(𝑠+3)4]
𝑠=−2
=
1 2[
2 1
]
=1
𝐴
2= [(𝑠 + 3)𝐶(𝑠)]
𝑠=−3= [
1
(𝑠 + 2)
3]
𝑠=−3
= −1
Y la solución como una función de tiempo es
c (t) =
𝑡2
CASO N° 3. POLOS COMPLEJOS CONJUGADOS.
La posición de los polos complejos de F(s) en el plano s se muestra en la figura 3.
Los polos complejos siempre son presentados en pares complejos conjugados; su
parte real puede ser positivo o negativo. Para los polos mostrados en la figura 3 la
transformada F(s) y sus fracciones parciales son:
𝐶(𝑠) =
𝑁(𝑠)
𝐷(𝑠)
=
𝑁(𝑠)
(𝑠
2+ 2𝛿𝑤
𝑛
𝑠 + 𝑤
𝑛2)(𝑠 − 𝑠
3)
=
𝐴
1(𝑠 − 𝑠
1)
+
𝐴
2(𝑠 − 𝑠
2)
+
𝐴
3(𝑠 − 𝑠
3)
=
𝐴1(𝑠+𝛿𝑤𝑛−𝑗𝑤𝑛√1−𝑠2)
+
𝐴2
(𝑠+𝛿𝑤𝑛−𝑗𝑤𝑛√1−𝑠2)
+
𝐴3(𝑠−𝑠3)
La transformada inversa de C(s) es:
f(t)=
𝐴
1𝑒
(−𝛿𝑤𝑛+𝑗𝑤𝑛√1−𝛿2)+ 𝐴
2
𝑒
(−𝛿𝑤𝑛+𝑗𝑤𝑛√1−𝛿2)+ 𝐴
1𝑒
(𝑠3𝑡)Entonces los polos
𝑆
1y
𝑆
2son complejos conjugados y entonces f(t) es una cantidad
real, los coefiientes
𝐴
1y
𝐴
2tienen también que ser complejos conjugados. La ecuación
puede escribirse con los primeros términos combinados para una más usual forma
senosoidal amortiguada:
𝑐(𝑡) = 2|𝐴
1|𝑒
−𝛿𝑤𝑛𝑡𝑠𝑒𝑛 (𝑤
𝑛√1 − 𝛿
2𝑡 + ∅) + 𝐴
3𝑒
𝑠3𝑡𝑐(𝑡) = 2|𝐴
1|𝑒
𝜎𝑡𝑠𝑒𝑛(𝑤
𝑑𝑡 + ∅) + 𝐴
3𝑒
𝑠3𝑡Donde el ángulo:
∅ = 𝑎𝑛𝑔𝑢𝑙𝑜 𝑑𝑒 𝐴
1+ 90.
Los valores de
𝐴
1𝑦 𝐴
3, del mismo modo que se fundamenta en la manera previamente
mostrada, son:
𝐴
1= ⟦(𝑠 − 𝑠
1)𝐶(𝑠)⟧
𝑠=𝑠1𝐴
2= ⟦(𝑠 − 𝑠
3)𝐶(𝑠)⟧
𝑠=𝑠3Así como
𝑠
1es complejo, la constante
𝐴
1es también compleja. Recuérdese que
𝐴
3está
asociada con el polo complejo con la parte imaginaria positiva.
En la figura 3, los polos complejos tienen una parte real negativa,
𝜎 = −𝛿𝑤
𝑛,
donde la
razón de amortiguamiento
𝛿
es positiva. Para este caso la correspondiente respuesta
transitoria es conocida como una sinusoidal de amortiguada y se muestra en la figura 4.
Si las raíces complejas son en la mitad derecha del plano s, la razón del
amortiguamiento es negativa. El ángulo n para este caso es medido para el eje real positivo
y está dado por:
cos 𝑛 = |𝛿|
Para el caso de:
𝐶(𝑠) =
1(𝑠2+6𝑠+25)(𝑠+2)
=
𝐴1
𝑠+3−𝑗4
+
𝐴2𝑠+3+𝑗4
+
𝐴3𝑠+2
Las constantes son:
Su valor final es cero. El ángulo ∅ mostrado en la figura 4, es medido del eje real negativo y se relaciona a la razón de amortiguamiento por : Cos 𝑛 = 𝛿
Si el polo complejo tiene una parte real positiva, la respuesta con respecto al tiempo se incrementa exponencialmente con el tiempo y el sistema es inestable.
𝐴
1⟦(𝑠 + 3 − 𝑗4)
1(𝑠+6𝑠+25)(𝑠+2)
⟧
𝑠=−3+𝑗4=
⟦
1
(𝑠+3+𝑗4)(𝑠+2)
⟧
𝑠=−3+𝑗4=
1(−3+𝑗4+3+𝑗4)(−3+𝑗4+2)
=
1
(𝑗8)(−1+𝑗4)
=
1
(8 ∡900)(4.123 ∡−75.960)
=
1
(32.984 ∡900+(1800−75.960)
=
0.0303
−194.04°
∅ = −194.04° + 90
0= −104.04°
𝐴
3⟦(𝑠 + 2)
(𝑠2+6𝑠+25)(𝑠+2)1⟧
𝑠=−2
=
⟦
1
(𝑠2+6𝑠+25)(𝑠+2)
⟧
𝑠=−2
= 0.059
La solución es:
c(t)=0.06
𝑒
−3𝑡𝑠𝑒𝑛 (4𝑡 − 104.04°) + 0.059𝑒
−2𝑡Este ejemplo es usado para ilustrar las técnicas en fracciones parciales de expansión.
C(s)
c(t) 0≤t
1
(𝑠 + 𝑐)[(𝑠 + 𝑎)
2+ 𝑏
2]
𝑒
−𝑐𝑡(𝑐 − 𝑎)
2+ 𝑏
2+
𝑒
−𝑎𝑡𝑠𝑒𝑛(𝑏𝑡 − ∅)
𝑏√(𝑐 − 𝑎)
2+ 𝑏
2∅ = 𝑡𝑎𝑛
−1𝑏
𝑐 − 𝑎
El ángulo de fase en el término sinusoidal amortiguada es:
∅ = 𝑡𝑎𝑛
−1 𝑏𝑐−𝑎
= ∅ = 𝑡𝑎𝑛
−1 42−3= 104°
Esto es importante para hacer notar que:
𝑡𝑎𝑛
−1 4−1
≠
𝑡𝑎𝑛
−1 4−1Para obtener el valor correcto para el ángulo de
∅
, es útil trazar un esquema, como
el mostrado e la figura 5. Esto evita ambigüedades y confirma que
∅
es evaluado
Figura 5. Calculo del ángulo θ.
POLOS IMAGINARIOS.
La posición de los polos imaginarios de C(s) en el plano s se muestra en la figura 6.
Como la parte real de los polos es cero, los polos se proyectan sobre los ejes imaginarios.
Esta situación es un caso especial de polos complejos, u,gr, la razón de amortiguamiento
𝛿 = 0
. Para los polos mostrados en la figura 4-5, la transformada f(s) y sus fracciones
parciales son:
𝐶(𝑠) =
𝑁(𝑠) 𝐷(𝑠)=
𝑁(𝑠) (𝑠2+𝑤
𝑛2)(𝑠−𝑠3)
=
𝐴1
𝑠−𝑠1
+
𝐴2
𝑠−𝑠2
+
𝐴3
𝑠−𝑠3
La cuadrática puede factor izarse en término de los polos
𝑠
1y
𝑠
2;
asi:
𝑠
2+ 𝑤
𝑛2
= (𝑠 − 𝑗𝑤
𝑛)(𝑠 + 𝑗𝑤
𝑛)
=(
𝑠 − 𝑠
1)
(
𝑠 + 𝑠
2)
La transformada inversa de la ecuación (4-57) es:
c(t)=
𝐴
1𝑒
𝑗𝑤𝑛𝑡+
𝐴
2
𝑒
−𝑗𝑤𝑛𝑡+
𝐴
3𝑒
𝑠3𝑡como c(t)es una cantidad real, los coeficientes A
1y A
2son complejos conjugados.
Los terminos de la ecuación pueden combinarse para una forma mas usual.
c(t)=2
|𝐴
1|
sen (
𝑤
𝑛𝑡 + ∅) + 𝐴
3𝑒
𝑠3𝑡Ya que no hay términos de amortiguamiento multiplicando la senoide, esos términos
representan un valor de estado estable. El ángulo
∅
es:
∅
=angulo de
𝐴
1+90°
Los valores de
𝐴
1𝑦 𝐴
2, establecidos de la manera convencional son:
𝐴
1= [(𝑠 − 𝑠
1)C(s)]
𝑠=𝑠1𝐴
2= [(𝑠 + 𝑠
2)C(s)]
𝑠=−𝑠2Para el caso donde
𝐶(𝑠) =
100
(𝑠
2+ 25)(𝑠 + 2)
=
𝐴
1(𝑠 − 𝑗5)
+
𝐴
2(𝑠 + 𝑗5)
+
𝐴
2(𝑠 + 2)
Los valores de los coeficientes son
𝐴
1= [(𝑠 − 𝑗5)𝐶(𝑠)]
𝑠=𝑗5=
[
(𝑠+𝑗5)(𝑠+2)100]
𝑠=𝑗5=
(𝑗5+𝑗5)(𝑗5+2)100=
(𝑗10)(𝑗5+2)100=
100
(10∡90°)(5.385∡68.2°)
=
100
53.85∡(90°+68.2°)
=
1.86 ∡ − 158.2°
𝐴
3= [(𝑠 + 2)𝐶(𝑠)]
𝑠=−2=
[
(𝑠2100+25)]
𝑠=−2=
100 (−22+25)=
100
(29)
= 3.45
𝜙 = −158.2° + 90° = −68.2°
La solución es:
c(t)= 3.72 sen (5t-68.2°)+3.45
𝑒
−2𝑡CASO 4: POLOS COMPLEJOS DE ORDEN MÚLTIPLE.
C(s)=
𝑁(𝑠) (𝑠2+2𝛿𝑤𝑛𝑠+𝑤𝑛2)𝑟𝑄1(𝑠)
=
𝐴𝑟
(𝑠+𝛿𝑤𝑛+𝑗𝑤𝑛√1−𝛿2)𝑟
+
𝐴𝑟´(𝑠+𝛿𝑤𝑛+𝑗𝑤𝑛√1−𝛿2)𝑟
+
𝐴𝑟−1
(𝑠+𝛿𝑤𝑛+𝑗𝑤𝑛√1−𝛿2)𝑟−1
+
𝐴𝑟−1´
(𝑠+𝛿𝑤𝑛+𝑗𝑤𝑛√1−𝛿2)𝑟−1
+ …
𝐴1(𝑠+𝛿𝑤𝑛+𝑗𝑤𝑛√1−𝛿2)
+
𝐴1𝑟
(𝑠+𝛿𝑤𝑛+𝑗𝑤𝑛√1−𝛿2)
+ …
Las constantes son evaluadas en la misma manera como para raíces reales repetidas, la
transformada inversa es de la forma:
c(t)= 2
|𝐴
𝑟|
𝑡𝑟−1
(𝑟−1)!
𝑒
−𝛿𝑤𝑛𝑡sen(
𝑤
𝑛√1 − 𝛿
2𝑡
+
∅
𝑟) +
2
|𝐴
𝑟−1|
𝑡𝑟−2
(𝑟−2)!
𝑒
−𝛿𝑤𝑛𝑡