INSTITUTO POLITECNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
UNIDAD ZACATENCO
SECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN MAESTRÍA EN CIENCIAS EN INGENIERÍA DE SISTEMAS
“DISEÑO DE UN MODELO CONCEPTUAL PARA EL LABORATORIO DE
SISTEMAS FLEXIBLES DE MANUFACTURA PARA LA ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA UNIDAD ZACATENCO”
TESIS
QUE PARA OBTENER EL GRADO DE:
MAESTRO EN CIENCIAS EN INGENIERIA DE SISTEMAS
PRESENTA:
ING. ALFREDO CONTRERAS MONDRAGÓN
DIRECTORES DE TESIS:
DR. JORGE ARMANDO ROJAS RAMÍREZ
DR. MIGUEL PATIÑO ORTIZ
Ing. Alfredo Contreras Mondragón TES.MAES.DOC
El escribir una tesis es un proceso variable en muchos aspectos, pero uno
recibe la ayuda, el apoyo y la motivación de diferentes personas.
Expreso en este breve texto mi profundo agradecimiento a todos los que me
han acompañado en estos años:
A mi Institución
A mi Familia
A mis Profesores
A mis Amigos
Con toda gratitud a mis padres, que me dieron lo que siempre soñé tener:
Ing. Alfredo Contreras Mondragón Tesis
RESUMEN
DISEÑO DE UN MODELO CONCEPTUAL, PARA EL LABORATORIO DE SISTEMAS FLEXIBLES DE MANUFACTURA, PARA LA ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA, UNIDAD ZACATENCO.
El objetivo de realizar el Diseño de un Modelo Conceptual, para el Laboratorio
de Sistemas Flexibles de Manufactura de la Escuela Superior de Ingeniería
Mecánica y Eléctrica, Unidad Zacatenco, del Instituto Politécnico Nacional, es
soportar el desarrollo de proyectos virtuales y reales en las carreras de
Ingeniería Eléctrica, Ingeniería en Comunicaciones y Electrónica, Ingeniería en
Control y Automatización e Ingeniería en Sistemas Automotores, empleando
métodos y programas de calidad apegados al sector industrial y, como
consecuencia, tener la capacidad de incorporar la vinculación escuela –
industria. El empleo de los Sistemas Flexibles de Manufactura permite
flexibilidad productiva, gestión en tiempo real y acelerado nivel de
automatización general. La presente propuesta consiste en aplicar métodos,
normas y estándares dela normatividad vigente para diseñar un laboratorio de
Sistemas Flexibles de Manufactura (FMS), dado que en el laboratorio se
pueden diseñar procesos de manufactura, hacer simulaciones gráficas y llevar
a cabo análisis de costos en tiempo real. En este contexto, en el laboratorio se
desarrollan actividades como simulaciones virtuales, evaluaciones y la
constante retroalimentación entre profesores, alumnos, egresados e
Ing. Alfredo Contreras Mondragón Tesis
CONCEPTUAL DESIGN OF A MODEL FOR THE LABORATORY OF FLEXIBLE MANUFACTURING SYSTEM FOR THE ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA, UNIDAD ZACATENCO.
The purpose of conducting the Design of a Conceptual Model for Flexible
System Laboratory of Manufacturing for the Escuela Superior de Ingeniería
Mecánica y Eléctrica, Zacatenco Unit , from Instituto Politécnico Nacional , is to
support the development of virtual and real projects in engineering careers like
Electrical Engineering , Communications and Electronics Engineering,
Automation and Control Engineering and Automotive Systems Engineering,
using quality methods and programs attached to the industrial sector and,
therefore, have the ability to incorporate school-industry linking. The use of
Flexible Manufacturing Systems allows production flexibility, real-time
management and overall level of automation accelerated. This proposal is to
apply methods, norms and standards of current regulations to design a
Laboratory Flexible Manufacturing Systems (FMS), given that in the laboratory
can design manufacturing processes, making graphical simulations and perform
cost analysis in real time. In this context, in the laboratory develop activities
such as virtual simulations, evaluations and constant feedback between
Ing. Alfredo Contreras Mondragón Tesis
INDICE
INTRODUCCIÓN i
ANTECEDENTES (CONTEXTO) ii
PLANTEAMIENTO DE LA PROBLEMÁTICA iii
OBJETIVOS iv
JUSTIFICACIÓN v
CAPÍTULO1. MARCO CONCEPTUAL Y MODELOS
1.1 Presentación del Proyecto 2
1.2 Marco Conceptual 3
1.3 Modelos 5
1.4 Alcance del Proyecto 5
CAPÍTULO 2. MARCO TEÓRICO Y METODOLÓGICO
2.1 Marco Teórico 8
2.2 Marco Metodológico 10
CAPÍTULO 3. SELECCIÓN Y DISEÑO CONCEPTUAL DE CÉLULAS FLEXIBLES 32
3.1 Selección de Células Flexibles 33
3.2 Diseño Conceptual de Células Flexibles 39
3.3 Resultados 42
3.4 Operación 43
CAPÍTULO 4. REQUERIMIENTOS PARA SU VALIDACIÓN 57
4.1 Normalización 58
4.2 Servicio Educativo 59
4.3 Costo 60
CONCLUSIONESY RECOMENDACIONES 66
REFERENCIAS BIBLIOGRÁFICAS 70
GLOSARIO 73
RELACIÓN DE TABLAS Y FIGURAS 79
Ing. Alfredo Contreras Mondragón Tesis i
La propuesta del diseño de un Laboratorio de Sistemas Flexibles de Manufactura, integra células de máquinas altamente automatizadas, que consisten en un grupo de estaciones de trabajo para procesar información, interconectadas por un sistema automatizado de almacenamiento y manejo de materiales, el cual escontrolado por una computadora.
El diseñode este Laboratorio brindala posibilidad de realizar prácticasen funciónde las cuatro carreras con que cuenta esta Unidad Académica, adicionalmente permitirá la simulaciónde procesos productivos en una entidad virtual, además de diseñar y desarrollar técnicamente un programa de un sistema de control automático; desde el inicio hasta el final del prototipodel producto seleccionado.
Para entender el procedimientopara el diseño conceptualde este Laboratorio, la tesis se desarrolla en cuatro capítulos.
En el Capítulo 1. Se describe la presentación del proyecto, atendiendo el marco conceptual, el método de desarrollo de la tesis y la Determinación de conceptos básicos.
El Capítulo 2. Esta referenciado al marco teórico y a su metodología analizada desde el contexto histórico, tecnológico y metodológico.
En el Capítulo 3. Se estructura todo el diseño conceptual y la selección de las células que se ocuparan para el proceso de los productos terminados de forma virtual, que ocuparan las cuatro especialidades de este plantel. Así como los métodos existentes de acuerdo a variables de entradas y salidas; para su análisis, integración y operación del proyecto.
En el Capítulo 4. Se escriben los requerimientos para su validación, tomando en cuenta la normalización, la relación y beneficio que tienen los Sistemas Flexibles de Manufactura con respecto en la educación, vinculación y en los procesos productivos de acuerdo al costo del proyecto.
iIng. Alfredo Contreras Mondragón Tesis ii
ANTECEDENTES (CONTEXTO)
El Instituto Politécnico Nacional es una institución educativa del Estado Mexicano, creada en 1936 con el fin de contribuir al desarrollo económico y social de la nación mediante la formación de recursos humanos profesionales e investigadores en los diferentes campos de la ciencia y la tecnología.
El IPN es un órgano desconcentrado de la Secretaría de Educación Pública, cuya orientación general corresponde al Estado; opera básicamente en el Distrito Federal, pero cuenta a la vez con dependencias en varias entidades de la República, constituido por escuelas, centros y unidades de enseñanza y de
investigación.[La ESIME en la Historia de la Enseñanza Técnica, Palafox, 1993]
Para lograrlo, su comunidad forma integralmente profesionales en los niveles medio superior, superior y posgrado; realiza investigación y extiende a la sociedad sus resultados con calidad, responsabilidad, ética, tolerancia y compromiso social.
La Escuela Superior de Ingeniería Mecánica y Eléctrica objeto de estudio, es una institución dedicada a la educación superior en donde íntegramente se preparan Ingenieros en Comunicaciones y Electrónica, Ingenieros en Electricidad, Ingenieros en Control y Automatización e Ingenieros en Sistemas Automotrices. En forma general esta escuela mantiene un promedio de 2800
alumnos egresados por cada ciclo escolar [Departamento de Gestión Escolar de
ESIME-ZACATENCO].
[image:9.595.80.518.479.728.2]Descripción del Modelo de ESIME-ZACATENCO
TABLA 1. DATOS GENERALES DE LA ESCUELA
Fuente: Manual de Organización de ESIME-ZAC, 2010
NOMBRE ESCUELA SUPERIOR DE INGENIERÍA
MECÁNICA Y ELÉCTRICA
GIRO EDUCATIVO
UBICACIÓN AV. POLITECNICO S/N, COL. LINDAVISTA, DEL.
GUSTAVO A. MADERO, C.P. 07320
SUBSISTEMAS DIRECCIÓN DE ESIME-ZACATENCO
SUBDIRECCIÓN ACADÉMICA SUBDIRECCIÓN DE SERVICIOS
EDUCATIVOS E INTEGRACIÓN SOCIAL
SUBDIRECCIÓN ADMINISTRATIVA SUBDIRECCIÓN ACADÉMICA
Ing. Alfredo Contreras Mondragón Tesis
Ser una Institución Educativa de excelencia, rectora en el área de la Ingeniería Electromecánica, que se caracteriza por sus valores y ética profesional, la tolerancia, el compromiso, la transparencia, la equidad y el trabajo en equipo con reconocimiento de los organismos de acreditación y certificación nacionales e internacionales, con personal académico de alto nivel, procesos educativos centrados en el aprendizaje y flexibles, promotora de la investigación educativa, científica y tecnológica, que generen tecnologías innovadoras y de vanguardia, para contribuir al logro de los objetivos institucionales, fortalecer la planta productiva del país y mejorar los niveles de bienestar de la población mexicana con calidad y preocupación por el medio
ambiente[Secretaría de Gestión Estratégica del I.P.N., 2012].
VISIÓN
La Escuela Superior de Ingeniería Mecánica y Eléctrica, es una escuela de carácter público, que forma Ingenieros, Maestros y Doctores en ciencias en el área electromecánica altamente calificados, innovadores, éticos, aptos para promover el desarrollo social, ejercer el liderazgo científico y académico, con acciones de vanguardia en el campo de la investigación, la docencia y la extensión, que contribuyen a la independencia económica, científica y
tecnológica de México [Secretaría de Gestión Estratégica del I.P.N., 2012].
POLÍTICA DE CALIDAD
Las Unidades Académicas de Nivel Superior, estamos comprometidas a satisfacer las necesidades de formación de nuestros estudiantes, a través de mejorar continuamente la eficacia del Sistema de Gestión de Calidad, a fin de
impulsar la excelencia académica [Secretaría de Gestión Estratégica del I.P.N., 2012].
OBJETIVOS DE CALIDAD
En cada período escolar, lograr el 90% de satisfacción en los servicios de Gestión Escolar proporcionado a los estudiantes.
Incrementar el aprovechamiento global de los estudiantes, a través de estrategias de aprendizaje establecidas en el Modelo Educativo Institucional (MEI), para lograr un nivel de satisfacción del 90% en cada período escolar.
Alcanzar el 90% de satisfacción en los servicios de apoyo educativo, en cada
Ing. Alfredo Contreras Mondragón Tesis
[image:11.595.85.515.94.718.2]Modelo Formal del Laboratorio de Sistemas Flexibles de Manufactura:
TABLA 2. ELEMENTOS DEL MODELO FORMAL
Fuente: Apuntes y Notas de la Materia de Sistémica Transdiciplinaria. Peón, 2012
SISTEMA LABORATORIO DE SISTEMAS FLEXIBLES
DE MANUFACTURA
SUBSISTEMAS SOCIALES INSTALACIÓN DE EQUIPO
ADMINISTRACIÓN DE EQUIPO
ATENCIÓN A ALUMNOS Y PROFESORES
VINCULACIÓN EXTERNA
SUBSISTEMAS TÉCNICOS INFRAESTRUCTURA
SISTEMAS DE ENTORNO COMISIÓN DE OPERACIÓN Y FOMENTO
DE ACTIVIDADES ACADÉMICAS
DEPARTAMENTOS ACADÉMICOS
UNIDAD POLITÉCNICA DE INTEGRACIÓN SOCIAL
FIGURA 1.MODELO DESCRIPTIVO FORMAL DEL SISTEMA SOCIO TÉCNICO ABIERTO
[image:11.595.93.504.393.682.2]Ing. Alfredo Contreras Mondragón Tesis
Tabla Complementaria:
TABLA 3. TABLA SISTÉMICA
Fuente: Apuntes y Notas de la Materia de Sistémica Transdiciplinaria. Peón, 2012
INTERRELACIÓN INTERNA
C
1
Comunicación
ss1 ss2 Layout de equipo y máquinas
ss2 ss1 Dimensiones y fichas técnicas
ss1 ss3 Solicitud de currículo
ss3 ss1 Propuesta de Prácticas
ss2 ss4 Características de equipos
ss4 ss2 Conceptualización de proyectos
ss3 ss4 Área de especialidad
ss4 ss3 Asignación de especialistas
INTERRELACIÓN EXTERNA
ss1 sA Adquisición de equipamiento requisado
sA ss1Suministro de Equipos
ss3 sB Oferta de prácticas, para las cuatro carreras
sB ss3 Estructuración de prácticas.
Aprendizaje teórico-práctico, para las cuatro carreras
ss4 sC Oferta multidisciplinaria deespecialidades
de la cuatro carreras
Ing. Alfredo Contreras Mondragón Tesis
O
Objetivos
SISTEMA: Laboratorio de Sistema Flexibles de Manufactura:
Cubrir la necesidades educativas de las cuatro carreras de ingeniería que oferta la ESIME, Unidad Zacatenco.
Subsistema ss1 Área de Instalación de Equipo:
Coordina y supervisa las actividades de instalación de equipo
Subsistema ss2 Área de Administración de Equipo:
Administra e informa las necesidades del laboratorio
Subsistema ss3 Área de atención a Alumnos y Profesores
Realización de prácticas de acuerdo a los programas de estudio y proyectos
vinculados
Subsistema ss4 Área de Vinculación:
Selección de proyectos vinculados
Subsistema Externo sA Comisión de Fomento de
Actividades Académicas del IPN:
Suministro por licitación de Equipamiento para talleres Y laboratorios
Subsistema Externo sB Departamentos Académicos de
ESIME-ZACATENCO:
Administración y control de las cuatro carreras de ingeniería
Subsistema Externo sC Unidad Politécnica de Integración
Social:
Administración y control de proyectos autogenerados y vinculados
C
2
Control
Documentación de interés por áreas
Registro de documentación e inventarios
Base de datos de Alumnos de las cuatro carreras
Actualización de la información de acuerdo a horarios
Cartera de proyectos propuestos
S
Supervivencia
Mantenimiento de la Infraestructura
Promoción y proyección de la imagen del laboratorio de FMS, ante el sector educativo y productivo.
Administración de Equipo
Ing. Alfredo Contreras Mondragón Tesis
La Escuela Superior de Ingeniería Mecánica y Eléctrica, tiene sus orígenes en la Escuela Nacional de Artes y Oficios, fundada en 1867.
Desde su fundación hasta mediados de 1915, se encomendó a este plantel la preparación de jóvenes para el ejercicio de diversas ramas de las artes manuales, con un enfoque primordialmente práctico, dado lo cual, fue necesario dotarla de herramientas y maquinaria apropiada para cumplir con su misión.
En 1916, la Escuela de Artes y Oficios se transformó en Escuela Práctica de Ingenieros Mecánicos Electricistas (EPIME). Evento de suma importancia, ya que se considera el origen de la educación técnica moderna en México base fundamental para el desarrollo de la industria nacional.
En febrero de 1916, para satisfacer la demanda que el crecimiento del país exigía empezó a funcionar la “Escuela Práctica de Ingenieros Mecánicos,
Electricistas y Mecánico-Electricistas” rescatando los elementos de la antigua
Escuela de Artes y Oficios para Hombres. Ofertando en un inicio, las carreras de Ingeniero Mecánico e Ingeniero Electricista.
Pasados 5 años (1921), se amplió el plan de estudios a siete años con la fusión de ambas carreras en una sola, la de Ingeniero Mecánico-Electricista, cambiando el nombre de la Escuela por el de EPIME: Escuela Profesional de Ingenieros Mecánicos y Electricistas.
En 1923, se unificó la enseñanza técnica del país creándose el Departamento de Enseñanza Técnica Industrial, formado por el Instituto Técnico Industrial, encargado de formar técnicos medios, y la EPIME, donde completaban sus estudios los egresados de dicho Instituto.
En 1932, la EPIME se transformó en Escuela Superior de Ingeniería Mecánica y Eléctrica (ESIME) con una misión más amplia acorde con las necesidades del
país en aquella época: “Adiestrar al hombre en el manejo inteligente de los
recursos teóricos y materiales que la comunidad ha acumulado para transformar el medio físico y adaptarlo a sus necesidades”.
El año siguiente surgió un nuevo cambio, ya que se nombra por primera vez a
un egresado de la EPIME, como director de la Unidad.[La ESIME en la Historia de la
iIng. Alfredo Contreras Mondragón Tesis
En 1934, se inició la integración definitiva de la educación técnica nacional con el objetivo de organizar la enseñanza en tres áreas: Ingeniería, Ciencias Biológicas y Ciencias Sociales, las cuales culminan al año siguiente. Así, con el apoyo de estudiantes de la Federación de Escuelas Técnicas y Profesionales no Universitarias aunado al entusiasmo de maestros y exalumnos profesionistas, en 1936, se creó el Instituto Politécnico Nacional.
La ESIME en ese año, modificó sus planes de estudio separando su única carrera en dos: Ingeniería Mecánica e Ingeniería Eléctrica y agregando dos nuevas carreras la de Ingeniería Aeronáutica e Ingeniería en Comunicaciones con planes de estudio, distribuidos en cuatro años, ocupando el recinto de la antigua Unidad Nacional de Artes y Oficios en las calles de Allende y Belisario Domínguez.
En 1958, se terminó la primera etapa de la construcción de la actual Unidad Profesional Zacatenco del Instituto Politécnico Nacional, que más tarde toma su nombre y que se encuentra ubicada en Zacatenco, D. F. Culminó esta primera etapa con el traslado de la población de la ESIME a su nuevo recinto, en los edificios 1 y 2.
En 1967, después de una revisión integral se modificaron de manera importante los planes y programas de estudio con miras de actualizarlos, ya que se reorganizan todas las carreras, en cursos semestrales planteando de manera más formal el sistema de créditos.
La reestructuración orgánica básica del Instituto fue registrada el 11 de octubre de 2002 y refrendada el 13 de marzo de 2003, con la separación de los órganos de mando del área central respecto a los órganos directivos de las escuelas, centros y unidades.
La reestructuración orgánica del Instituto con el propósito de avanzar en la consolidación del Modelo Educativo y del Modelo de Integración Social fue registrada en Septiembre de 2005, con la descentralización de los órganos de mando del área Central respecto a los órganos directivos de las escuelas, centros y unidades.
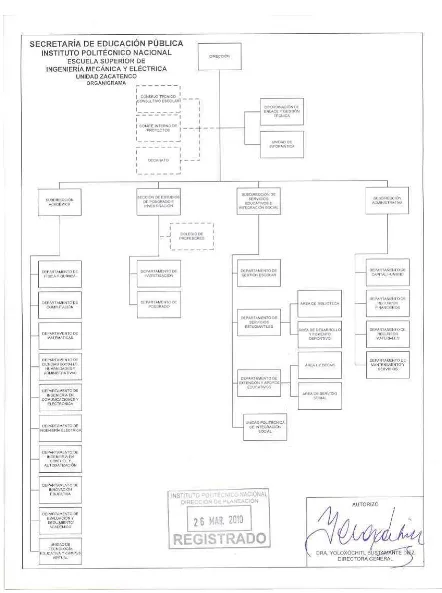
La actualización del registro de la ESIME, Unidad Zacatenco se contempla en
el año 2009. Quedando su estructura como se muestra en la figura 2.[La ESIME en
iIng. Alfredo Contreras Mondragón Tesis
FIGURA 2. ORGANIGRAMA DE ESIME-ZACATENCO
Fuente:Manual de Operación de ESIME-Zacatenco, 2010
iIng. Alfredo Contreras Mondragón Tesis
[image:17.595.87.530.251.589.2]Administración del Laboratorio de Sistemas Flexibles de Manufactura:
FIGURA 3. MODELO JERÁRQUICO LINEAL DEL LABORATORIO DE FMS
Fuente:Apuntes y Notas de la Materia de Sistémica Transdiciplinaria. Peón, 2012 LABORATORIO DE
SISTEMAS FLEXIBLES DE MANUFACTURA
INSTALACION DE EQUIPOS
DISEÑO
EQUIPOS Y MAQUINAS
ADMINISTRACION DE EQUIPOS
INTERNOS
EXTERNOS
ATENCION DE ALUMNOS Y PROFESORES
ALUMNOS
PROFESORES
INVESTIGADORES
VINCULACION
INTERNA
EXTERNA
ALMACEN
REFACCIONES
Ing. Alfredo Contreras Mondragón Tesis iii
Actualmente el Departamento Académico de Ingeniería en Control y Automatización, tiene a su cargo el Laboratorio de Robótica Industrial, localizado en el Laboratorio de Pesados 2, correspondiente al Taller de Máquinas y Herramientas; compuesto por el siguiente equipo:
Estación de Robótica
Estación de Sistema Flexible de Manufactura
Estación de Visión
Estación de Almacenamiento Automatizado AS/RS
Estación de Control (CIM)
Estación Neumática
De acuerdo a las Normas Técnicas de Competencia Laboral (NTCL), este sistema se considera un Centro Integral de Manufactura (CIM).
Este Laboratorio desde su adquisición (1990), no ha funcionado como tal, porque no cuenta con las interfaces correspondientes para su operación y como consecuencia no puede relacionarse un equipo con otro, es decir trabajan de manera independiente, cada una de las células.
Por su configuración Flexible, este Laboratorio puede funcionar como un Sistema Flexible de Manufactura, para esto, se debe de realizar el diseño de un modelo conceptual y proponer células flexibles modulares, para la integración total de cada uno de los elementos que lo componen, para que permita formar un solo sistema a través de las diferentes interfaces.
Analizando el mapa curricular y cada una de las materias de las especialidades que se imparten en esta Unidad Académica, se selecciona cada una de las células flexibles que van a funcionar, para complementar el actual laboratorio y poder realizar prácticas, simular procesos productivos, diseñar y desarrollar programas de automatización.
Esta propuesta se suma al Marco Educativo de la Secretaría de Gestión Estratégica del Instituto Politécnico Nacional, 2012, en cuanto a la Misión, Visión, Política de Calidad y Objetivos de Calidad de la Escuela Superior de Ingeniería Mecánica y Eléctrica.
Ing. Alfredo Contreras Mondragón Tesis iv
OBJETIVO GENERAL
Ing. Alfredo Contreras Mondragón Tesis iv
OBJETIVOS ESPECÍFICOS
1. Proponer un Modelo de Células Flexibles modulares, para la integración del Laboratorio de Robótica Industrial actual.
2. Realizar prácticas en una entidad virtual, para desarrollar habilidades en los alumnos, de las cuatro carreras que ofrece este plantel.
3. Simulación de procesos productivos, de una forma virtual.
Ing. Alfredo Contreras Mondragón Tesis v
JUSTIFICACIÓN
Para que esta Unidad Académica sea rectora en el área de la Ingeniería Electromecánica, se deben formar alumnos que sean competentes, y para eso es necesario que no solo memoricen conceptos y teorías, sino que dominen habilidades de las asignaturas y que además aprendan los valores y actitudes que les van a permitir desarrollarse como seres sociales. Para cumplir con esta misión es necesario desarrollar proyectos que contribuyan a formar Ingenieros, con apoyo y actualización de Maestros y Doctores en ciencias altamente calificados en el campo de la investigación, la docencia y en la extensión de sistemas productivos.
El alcance de este proyecto es realizar prácticas en una entidad virtual, simular procesos productivos, diseñar y desarrollar programas de automatización para el sector productivo, por medio de proyectos vinculados o proyectos autogenerados, a través de las carreras de Ingeniería Eléctrica, Ingeniería en Comunicaciones y Electrónica, Ingeniería Automotriz, Ingeniería en Control y Automatización, Gestión de la producción y Mantenimiento industrial.
Para poder realizar lo anterior se requiere que el sistema sea modular y tenga compatibilidad con el Laboratorio actual de Robótica Industrial, lo cual se puede llevar a cabo por medio de Células Flexibles de Manufactura.
Con el estudio y aprovechamiento de todas las ventajas que brinda un Laboratorio de Sistemas Flexibles de Manufactura, el alumno tendrá las herramientas necesarias para poder enfrentar los problemas que se presentan actualmente en el sistema industrial.
Ing. Alfredo Contreras Mondragón Tesis
Las últimas tendencias del sector educativo, apuntan hacia la Realidad Virtual como uno de los mejores medios para llevar a cabo la simulación, pues es capaz de representar distintos elementos de manera que los usuarios son capaces de percibirlos a través de sus sentidos y de interactuar con ellos en tiempo real de una forma similar a como lo harían en el caso de que estuvieran manejando objetos reales. Esto es, va a permitir crear laboratorios virtuales a partir de los cuales se pueden realizar prácticas tanto de programación como de gestión de una manera relativamente, fácil, económica y segura.
Seguidamente, se presenta un esquema para la creación de diseños y proyectos virtuales y reales. A través del Taller de Máquinas y Herramientas integrado a las células del Sistema Flexible de Manufactura.
Se sabe que la robótica en el campo industrial ha automatizado de forma diferente los procesos industriales, presentando un carácter multifuncional y reprogramable donde se integran varias máquinas y sistema del entorno para mejorar los rendimientos y la utilización de los recursos; esto significa utilizar eficientemente la maquinaria.
La capacidad de procesar una gran variedad de productos, el rápido ajuste físico para el cambio y el veloz ajuste de instrucciones, le permite a las empresas ofrecer variedad de lotes en periodos de tiempo más cortos.
Una vez terminado el proceso de maquinado el robot toma el producto realizado en la estación de maquinado y lo regresa a las bandas, en donde llegará a la estación de verificación en donde se aprobará o rechazará la pieza de acuerdo a las especificaciones y tolerancias programadas.
Ing. Alfredo Contreras Mondragón Tesis 1
CAPÍTULO 1
Ing. Alfredo Contreras Mondragón Tesis 2
1.1 Presentación del Proyecto
Para lograr el diseño conceptual de un Laboratorio dentro del sector educativo, es necesario tomar en cuenta varios factores, principalmente el espacio, la cantidad de alumnos a atender, el número de prácticas a realizar, el número de proyectos que se solicitan por presupuestos autogenerados y el número de proyectos que se hacen realizan por presupuestos vinculados.
Para implementar en un Laboratorio prácticas virtuales y simular procesos productivos, es necesario contar con equipos de alta resolución, además de un software que sea compatible con los sistemas informáticos actuales.
En todos los proyectos por ampliación o modificación, debe de aprovecharse al máximo los recursos, equipos y materiales con que este cuenta; los implementos adicionales, deben de ser de tipo modular para mejorar el sistema actual y pensar que estos módulos tienen que renovarse de acuerdo a los conceptos de modelos educativos y de producción modernos.
Debido a lo citado, se propone estructurar un modelo conceptual, para convertir el Laboratorio de Robótica Industrial, perteneciente al Departamento Académico de Ingeniería en Control y Automatización; ubicado en el Taller de Máquinas y Herramientas de este Plantel, en Módulos Flexibles, para desarrollar prácticas virtuales y reales; en función de las cuatro especialidades educativas actuales.
A este sistema de acuerdo a su objetivo se le denomina: “Diseño de un Modelo
Conceptual parael Laboratorio de Sistemas Flexibles de Manufactura de la
Escuela Superior de Ingeniería Mecánica y Eléctrica, Unidad Zacatenco”.
Ing. Alfredo Contreras Mondragón Tesis 3
1.2 Marco Conceptual
Un Sistema Flexible de Manufactura, consta de varias máquinas-herramientas controladas numéricamente por computador donde cada una de ellas es capaz de realizar muchas operaciones debido a la versatilidad de las máquinas-herramientas y a la capacidad de intercambiar máquinas-herramientas de corte con rapidez (en segundos), estos sistemas son relativamente flexibles respecto al número de tipos de piezas que pueden producir de manera simultánea y en lotes de tamaño reducido (a veces unitario). Estos sistemas pueden ser casi tan flexibles y de mayor complejidad que un taller de trabajo y al mismo tiempo tener la capacidad de alcanzar la eficacia de una línea de ensamble bien balanceada [Kusiak, 2000].
Los conceptos más importantes que integran un Sistema Flexible de Manufactura, son:
a) Máquina-herramienta con control numérico, CNC b) Transfer
c) Célula o celda flexible de manufactura d) Línea flexible de fabricación
e) Fábrica totalmente automatizada
a) La Máquina-herramienta CNC, dispone de un control numérico propio y puede incorporar un sistema de alimentación y cambio automático de herramientas.
4Ing. Alfredo Contreras Mondragón Tesis 4
c) Celda Flexible, es un sistema integrado por máquinas -herramientas
enlazadas mediante un sistema de manejo de materiales automatizado operado automáticamente con tecnología convencional o al menos por un CNC (Control Numérico Computarizado).
d) La flexibilidad de estos sistemas de manufactura está en función del manejo de materiales, del almacenamiento y de recuperación de producto. El manejo de materiales es controlado por una computadora central y ejecutada en forma automática por vehículos guiados como conveyor y varios mecanismos transfer. En este sistema se pueden transportar algunos materiales y partes durante varias etapas para completar una operación en orden aleatorio en cualquier momento.
e) Por ejemplo a través de vehículos guiados automatizados. Los FMS disponen de un sistema de manejo de materiales automatizado que transporta las piezas de una máquina a otra hacia dentro y fuera del sistema. Puede tratarse de vehículos guiados automáticamente conducidos por alambre de un sistema transportador o de carros remolcados por línea y por lo general intercambian de plataforma con las máquinas.
El empleo de los FMS permite flexibilidad productiva, gestión en tiempo real y nivel de velocidad de automatización general; es decir, una celda en línea es en resumen el ingreso de materia prima y obtener partes del producto, listos para ser ensamblados.
Ing. Alfredo Contreras Mondragón Tesis 5
1.3 Modelos
Para el desarrollo de este proyecto se utilizan los siguientes modelos: 1.3.1 Modelo Educativo por Competencias
Este Modelo se propone debido a su equivalencia con el mapa curricular de la Escuela Superior de Ingeniería Mecánica y Eléctrica; que se fundamenta en lograr que el alumno adquiera habilidades, que aprenda a conocer, a hacer, a ser y a saber convivir. Estos son los cuatro pilares de la educación actual cuyo objetivo es formar alumnos que sean competentes, y para eso es necesario que no solo memorice conceptos y teorías, sino que domine las prácticamente la asignatura y que además asimile los valores y actitudes que le van a permitir
desarrollarse como ser social.[Un Nuevo Modelo Educativo para el I.P.N., 2003]
1.3.2 Modelo Virtual
Virtual es un adjetivo que, en su sentido original, hace referencia a aquello que tiene virtud para producir un efecto en el tiempo.
Se conoce como realidad virtual al sistema tecnológico que permite al usuario tener la sensación de estar inmerso en un mundo diferente al real. Esta ilusión se produce gracias a los modelos creados por una computadora que el usuario contempla a través de una visión y formatos digitales (Software).
La Educación virtual, ofrece a la escuela un medio para extender sus recursos didácticos más allá de los confines de unárea geográfica limitada. Así pues se enuncia que el objetivo principal es: “El ligar interactivamente estudiantes, instructores y contenido didáctico separados por distancia y tiempo”.
1.4 Alcance del Proyecto
El alcance de este Proyecto es optimizar los recursos existentes con que cuenta actualmente esta Unidad Académica, respecto al Laboratorio de Robótica Industrial. Considerando los procedimientos adecuados y la secuencia sistémica de cada uno de los sucesos presentes en el diseño de este trabajo, tomando en cuenta que el proyecto es para fines educativos en donde participa, la parte interna que son los estudiantes, profesores e investigadores; la parte externa en la cual se considera a los Proyectos Vinculados y Proyectos Autogenerados.
Ing. Alfredo Contreras Mondragón Tesis 6
FIGURA 4. ALCANCE DEL PROYECTO
Fuente: Apuntes y Notas de la Materia de Sistémica Transdiciplinaria. Peón, 2012
LABORATORIO DE ROBÓTICA INDUSTRIAL
(EXISTENTE) ALUMNOS
PROFESORES
PROYECTOS: VINCULADOS Y AUTOGENERADOS
DISEÑAR UN MODELO CONCEPTUAL
DEL CIM ACTUAL A UN FMS
ESTRUCTURAR UN MODELO CONCEPTUAL
PROPONER CÉLULAS FLEXIBLES MODULARES
Ing. Alfredo Contreras Mondragón Tesis 7
CAPÍTULO 2
Ing. Alfredo Contreras Mondragón Tesis 8
Los Sistemas Flexibles de Manufactura han sido elementos clave en el desarrollo de productos acordes a las demandas actuales del mercado; sin embargo no son un elemento reciente en el ámbito de la manufactura puesto que desde finales de 1970 a 1980, ya se tenían aplicaciones en algunas industrias de forma parcial y discusiones académicas sobre la definición del concepto y su clasificación. Se tienen múltiples reportes alrededor del mundo de las ventajas competitivas que aportan, sin embargo en nuestro contexto latinoamericano, no se ha podido explotar estos beneficios para tener una
herramienta más de competencia ante las exigencias mundiales [Peoples, 1993]
Desde hace más de 4 décadas se ha efectuado en el mundo de la manufactura, un arduo trabajo de investigación y desarrollo, para generar nuevas alternativas de producción que permitan aportarle a las organizaciones ventajas que les auxilien ya sea, a incursionar en nuevos mercados o mantener su posicionamiento como líderes; dentro de dichos esfuerzos, se fue consolidando la aportación significativa de los Sistemas Flexibles de Manufactura.
Un elemento determinante para los Sistemas Flexibles de Manufactura son los robots multipropósito o de ensamble, que sustituyen la actividad humana en los procesos productivos; podríamos establecer que sin ellos, no se tiene un FMS. Por esta razón los sistemas flexibles de manufactura están formados por un grupo de máquinas y equipo auxiliar unidos mediante un sistema de control y transporte, que permiten fabricar piezas en forma automática. La ventaja de los FMS es su gran flexibilidad en términos de poco esfuerzo y corto tiempo
requerido para manufacturar un nuevo producto [Groover, 2001]
Ing. Alfredo Contreras Mondragón Tesis 9
Un Centro Integral de Manufactura es una metodología y un acierto que envuelve el ensamble, manufactura de materiales y sistemas computarizados.
El Centro Integral de Manufactura, incluye a la manufactura asistida por computadora (CAM), diseño asistido por computadora (CAD), ingeniería asistida por computadora (CAE), planeación del proceso auxiliada por computadora así como funciones administrativas y comerciales de las empresas.
Estos subsistemas por así llamarlos o paquetes dentro del CIM son diseñados, desarrollados y aplicados de tal forma que la salida proveniente de un subsistema sirve como una entrada hacia otro de los subsistemas. De forma organizada, estos subsistemas están divididos generalmente en planeación y ejecución de funciones. Las funciones de planeación incluyen actividades tales como pronósticos, planeación, planeación de los requerimientos de materiales y contabilidad. En lo que respecta a las funciones de ejecución, estas incluyen la producción, control de proceso, manejo de materiales, inspección y pruebas.
La efectividad del CIM actual depende en gran medida de la presencia de un gran sistema de comunicación mismo que envuelve computadoras, máquinas y sus controles. El mayor problema que se tiene en este Laboratorio es que no cuenta con la integración de células de procesos, ni con las interfaces de conexión entre cada uno de los equipos y no se tiene un taller de máquinas y herramientas; para que se puedan desarrollar y diseñar prototipos de forma virtual y de forma real.
Por este motivo se propone diseñar un Modelo Conceptual de un Laboratorio de Sistemas Flexibles de Manufactura, que sirva para las cuatro diferentes especialidades que tiene actualmente la Escuela Superior de Ingeniería
Mecánica y Eléctrica, de la Unidad Profesional “Lic. Adolfo López Mateos”.
Ing. Alfredo Contreras Mondragón Tesis 10
Para la presentación o realización de un diseño de proyecto, ya sea en elsector productivo o educativo es conveniente contar con una metodología en la que se definan y sistematicen los pasos a seguir para que sea posible llevarlo a cabo de un modo satisfactorio. Cuando el grado de complejidad de un diseño a desarrollar aumenta es necesario establecer una metodología que permita resolver más fácilmente los problemas encontrados a lo largo del proceso constructivo del trabajo y obtener resultados más eficientes.
Si aplicamos a esta descripción anterior la definición de sistemas, que es un “grupo de elementos mutuamente relacionados, de tal forma que el grupo
constituye un todo que tiene propiedades como si fuera una entidad” [Checkland
P., Scholes J., 1990].
Sobre este concepto se analizan las diferentes metodologías existentes sobre Sistemas Flexibles de manufactura y como resultado se establece la comparación entre lo que actualmente tiene el Departamento Académico de Ingeniería en Control y Automatización y lo que se propone en esta tesis.
El propósito de este trabajo, es identificar los sistemas existentes con los que actualmente cuenta esta escuela, los cuales no satisfacen los requerimientos necesarios, determinando las causas y sus efectos, esto justifica la alternativa de solución, con el diseño de un Laboratorio de Sistemas Flexibles de Manufactura de forma integral para cubrir las necesidades educativas de este plantel.
Ing. Alfredo Contreras Mondragón Tesis 11
FIGURA. 5 SISTEMA ACTUAL DEL CENTRO INTEGRAL DE MANUFACTURA
Fuente: Apuntes y Notas de la Materia de Sistémica Transdiciplinaria. Peón, 2012
Para la propuesta del Diseño del Laboratorio de Sistemas de Manufactura Flexible, es necesario seleccionar una Metodología que cumpla y se adapte con el mapa curricular de las cuatro carreras que se imparten en este plantel.
Actualmente existen varias metodologías y modelos para seleccionar un Sistema de Manufactura Flexible, entre las cuales se encuentran las siguientes.
2.2.1 Metodologías
Metodología de Programación Matemática
Esta metodología consiste en que las propiedades de los elementos de un sistema (máquinas, partes en proceso, transportadores, zonas de almacenamiento, entre otros) son representadas por cantidades algebraicas que pudieran ser parámetros o variables. Un programa matemático es formulado en términos de esas cantidades para alcanzar un objetivo particular, que puede ser maximizar una producción
esperada, maximizar utilización o minimizar costos.[MarkovNarahary, 1987]
OBJETIVO:
NO SE
OPTIMIZARON LOS RECURSOS EXISTENTES SALIDA = 0
SIN PRÁCTICAS
CIM
ALMACENAMIENTO MANUFACTURA Y DISTRIBUCIÓN ALUMNOSPROYECTOS
Ing. Alfredo Contreras Mondragón Tesis 12
Esta se describe por el estado de sus componentes, las evoluciones de estado de las unidades de transporte y manufactura son directamente manejadas por el sistema de control de producción que toma sus propias decisiones con base al estado de almacenamiento. El modelado de este sistema se toma como unos procesos estocásticos de Markov, que indica que el espacio de estado del sistema puede ser representado
como un “Diagrama de Transición de Estado” de dos máquinas y un
buffer, como se indica en la figura 6.[MarkovNarahary, 1987]
∞∞
FIGURA 6. EJEMPLO DE METODOLOGÍA DE TRANSICIÓN DE ESTADO DE
DOS MÁQUINAS[MarkovNarahary, 1987]
- Si el buffer (β), está lleno M1 no puede insertar una pieza, es decir
M1 está bloqueada
- Si el buffer (β), está vacío, M2 no puede trabajar y se dice que M2
está carente.
- M1 y M2 no pueden estar carentes ni bloqueadas, porque los buffer
(∞), de entrada y salida tienen capacidad infinita, el estado del buffer
es caracterizado por su número de partes, (ƞ) a cualquier tiempo, ƞ = 0, 1, 2,. . . ., N.
- Si se ignoran los fenómenos de bloqueo y carencia, la tasa de producción de cada máquina se computa como la probabilidad de estar operando continuamente, sin ninguna restricción y se puede formular un esquema matemático ideal.
Ing. Alfredo Contreras Mondragón Tesis 13
2.2.3 Metodología Basada en Relaciones Entidad-Recurso
Esta metodología modela explícitamente los elementos del sistema en los FMS y las relaciones entre ellos. Las partes son tratadas como entidades que usan los recursos para obtener su procesamiento o manejo. Las interacciones dinámicas en los FMS son modeladas verificando su apego a pre-condición anexado al estado de estas entidades y recursos. Entre los esquemas de Entidad-Recurso podemos enunciar las presentadas en las figuras 7 y 8. Conocidas como modelo
[image:35.595.119.525.468.714.2]de colas.[Modelos Markovianos, Leonard E. Baum, 1960]
FIGURA 7. MODELO DE COLA DE RED DE ESPERA ABIERTA
FIGURA 8. MODELO DE COLA DE RED DE ESPERA CERRADA
[Modelos Markovianos, Leonard E. Baum, 1960]
M1
M2
M3
ARRIBO DE
PARTES PARTES
MANUFACTURADAS
q2 = 1 – q1
q1
M1
M2
M3
q1
Ing. Alfredo Contreras Mondragón Tesis 14
2.2.4. Metodología de Manufactura Esbelta
[image:36.595.73.565.315.684.2]El Sistema de Manufactura Esbelta es esencialmente un sistema integrado de producción, el cual busca la eliminación de toda clase de desperdicio, estableciendo un flujo continuo a través de todo el proceso, siendo lo suficientemente flexible para ser adaptado a los cambios del mercado con el apoyo de diversas metodologías de mejora, como se muestra en la Tabla 4.
TABLA 4. METODOLOGIA PARA IMPLANTAR UN SISTEMA DE MANUFACTURA
Ing. Alfredo Contreras Mondragón Tesis 15
2.2.5 Modelos Analógicos al Proyecto
Modelo de Colas: Se basa en la teoría matemática de colas.
Simulaciones Discretas: Simulación por ordenador del sistema. Suele
dar resultados relativamente fiables.
Modelos Heurísticos: Basados en aproximaciones analíticas.
Modelos Deterministas: Muy utilizados y estudiados. Como el modelo
Bottleneck Model (modelo de cuello de botella), y Extended Bottleneck Model, consiste en que la estacióncuya tasa de producción es menor a la del resto de estaciones del sistema, tiene unautilización del 100% y que en ningún momento se producen retrasos debido a colasde productos. Al no ser del todo realistas estas suposiciones, se ideó el Extended
2.2.6 Modelo Virtual
[image:37.595.127.535.475.721.2]Este modelo consiste en crear laboratorios virtuales de Sistemas Flexibles para el sector educativo. El entorno virtual depende de las condiciones o procesos a desarrollar por los usuarios de acuerdo al perfil de cada especialidad y se representa en la figura 9.
FIGURA 9. MODELO VIRTUAL EMPLEADO EN LA DOCENCIA [E.M. Rubio, 2001].
ENTORNO REAL (ENTES)
PRIMERA CONDICIÓN SEGUNDA CONDICIÓN TERCERA CONDICIÓN ENTORNO VIRTUAL
(MODELOS)
FUENTE DE INFORMACIÓN
ENTES MODELOS
ENTIDADES
REGLAS DE COMPORTAMIENTO
MEDIOS
PARA GENERAR
ENTIDADES
Y
Ing. Alfredo Contreras Mondragón Tesis 16
Modelo educativo según Kaufman y Herman, 1997 debe contemplar: la misión, el entorno y su influencia, la visión, los objetivos, las estrategias y las acciones, y seguimiento del proyecto.
2.2.8 Otros Modelos Educativos
Hay una gran variedad de modelos educativos, dentro de los que podemos mencionar los siguientes:
2.2.8.1 Modelo tradicional.
Se refiere principalmente a la elaboración de un programa de estudio. Su principal actuante es el maestro, minimizando al alumno que es tratado como objeto de aprendizaje; éste debe de memorizar una gran cantidad de información presentada en cuestionarios, es decir, su papel sólo es receptivo.
2.2.8.2 Modelo de Ralfh Tyler. Su principal aportación es el concepto de objetivos. Éstos se convierten en el núcleo de los programas de estudio, determinado todo el funcionamiento. En este modelo las acciones del profesor están determinadas por el objetivo, así como sus actividades (enseñanza), el alumno, por otro lado, se convierte en sujeto de aprendizaje realizando acciones (actividades de aprendizaje) que son registradas por el profesor. La información se presenta por medio de objetivos, es decir se fragmentan los contenidos.
Ing. Alfredo Contreras Mondragón Tesis 17
El modelo educativo por competencias al enfatizar en una práctica educativa centrada en el aprendizaje, propicia el desarrollo integral del estudiante por competencias actualizables ya que promueve una educación continua donde el estudiante aprende a aprender a lo largo de la vida y a desarrollar habilidades propias.
2.2.9 Metodología Propuesta
La finalidad de este trabajo es describir, proponer y establecer las necesidades íntegramente de los Sistemas Flexibles de Manufactura en la educación. Para ello es necesario mostrar un método que sistematice y facilite la propuesta de este proyecto para que complete y mejore lo existente dentro de la Escuela Superior de Ingeniería Mecánica y Eléctrica.
La mayoría de las metodologías están dirigidas al sector productivo, para el Diseño Conceptual del Laboratorio de Sistemas Flexibles de Manufactura, se utiliza una metodología básica para el desarrollo de sistemas la cual plasma en
síntesis, el enfoque de sistemas “o de relativo a un sistema visto como un todo”
[Checklan P., Scholes J., 1994], en un proceso de fluido cibernético dinámico
activo” [Van Gigch, 1997], de retroalimentación constante y como una
[image:39.595.326.547.497.717.2]combinación entre el modelo virtual y el modelo educativo por competencias; esta metodología se muestra en la figura 10 en nueve niveles.
FIGURA 10. MARCO METODOLÓGICO PROPUESTO
MEDIO AMBIENTE INTERNO:
1. Departamento Académico de Ingeniería Eléctrica
2. Departamento Académico de Ingeniería en Comunicaciones y Electrónica
3. Departamento Académico de Ingeniería en Control y Automatización 4. Departamento Académico de Ingeniería en Sistemas Automotrices 5. Coordinación de Laboratorios de I.C.A.
6. Jefe de Laboratorio de Robótica Industrial (CIM) 7. Sección de Estudios de Posgrado e Investigación (SEPI)
MEDIO AMBIENTE EXTERNO:
8. Unidad Politécnica de Integración Social (UPIS) 9. Proyectos Vinculados
VISIÓN SISTEMÁTICA INTEGRAL:
Ing. Alfredo Contreras Mondragón Tesis 18
curricular de cada una de las carreras que integran este plantel, el cual se estructura y se resume en la Tabla 5, para las siguientes materias:
TABLA 5. APLICACIÓN DEL MODELO EDUCATIVO POR COMPETENCIAS
[Mapa Curricular de ESIME Zac, 2012].
Carrera Materia Competencias Específicas
Inge nie rí a e n Comuni ca cion es y E le ctrón ic a Con trol A na lóg ic o. S ervomeca nism os
Diseñará y calculará un Servo-Sistema de uso en la industria sus parámetros, elementos y mandos, con señales analógicas
Aplicará los principios y leyes que rigen el comportamiento de los amplificadores operacionales, para hacer arreglos de controladores de Servo sistemas basándose en las distintas configuraciones.
Explicará las principales características de las Máquinas Eléctricas y analizará estos elementos electromecánicos mediante los modelos matemáticos que los rigen.
Calculará y probará las consideraciones técnicas de los servomotores para un mejor desempeño.
Calculará y seleccionará las diferentes redes de
estabilización de fase aplicadas a los
servomecanismos.
Calculará los diferentes componentes que constituyen un servo-sistema.
Diseñará un servo-sistema aplicado a un proceso industrial de posición, velocidad o aceleración, como
Ing. Alfredo Contreras Mondragón Tesis 19
Carrera Materia Competencias Específicas
Con
trol c
on
u
so
d
e P
LC
Aplicará los dispositivos y sistemas más comunes utilizados en el control de maquinaria y procesos industriales en problemas de diseño relacionados con la automatización de procesos.
Aplicará los principios y leyes que rigen el comportamiento de los diferentes tipos de sensores existentes en simulaciones y prácticas de detección dentro del laboratorio.
Aplicará tecnologías de control usando elementos de sistemas electromecánicos, para el arranque de motores eléctricos, también propondrá aplicaciones con sistemas hidráulicos, neumáticos e híbridos.
Aplicará tecnologías de control usando elementos de sistemas electromecánicos, para el arranque de motores eléctricos, también propondrá aplicaciones con sistemas hidráulicos, neumáticos e híbridos.
Realizará pruebas con diferentes métodos para el acoplamiento de señales de baja y alta potencia por medios de aislamiento óptico.
Identificará la arquitectura de controladores lógicos programables, enlistará los tipo de lenguajes de programación para PLC’s, y valorará los criterios para la selección y dimensionamiento de los controladores lógicos programables.
Ing. Alfredo Contreras Mondragón Tesis 20
In
strume
nta
ción
d
e
P
ro
ce
so
s
Aplicará los principios de la Instrumentación de
Procesos industriales prácticos para
instrumentar un sistema de control con el manejo de variables de temperatura, presión, nivel, flujo y elementos finales de control.
Aplicará los conceptos de metrología en la especificación de los instrumentos de medición y cálculo de válvulas, utilizando las diversas unidades de medición. Aplicará la codificación e identificación de los Instrumentos de procesos de acuerdo a las normas ISA (Instruments Society of American).
Analizará la variable temperatura para
instrumentar un proceso industrial de casos prácticos.
Analizará la variable presión para instrumentar un proceso industrial de casos prácticos.
Analizará la variable nivel para instrumentar un proceso industrial de caso prácticos.
Analizará la variable flujo para instrumentar un proceso industrial de caso prácticos.
Ing. Alfredo Contreras Mondragón Tesis 21
Carrera Materia Competencias Específicas
Ing
eni
erí
a en
C
on
tr
ol
y
Au
to
m
ati
za
ci
ón
Maqu inas Elé ctric as IComprobará el funcionamiento y desempeño de las máquinas que operan con corriente directa, bajo previo análisis de los componentes y características de las diferentes clases y tipo de motores que se emplean en maquinaria y procesos industriales.
Identificará que es un sistema de campo magnético y los elementos que lo integran e interactúan con el exterior.
Aplicará los elementos y componentes básicos de una maquina rotatoria, haciendo uso de los conceptos de un sistema de campo magnético.
Identificará los componentes del motor de corriente directa, en los tipo de conexión serie, paralelo y compuesto, indicando las ventas y desventajas de cada una de las conexiones del motor.
Identificará los elementos que integran un servomotor, así como su selección, aplicación, instalación, control y sus elementos auxiliares de control.
Ing. Alfredo Contreras Mondragón Tesis 22 Maqu inas Elé ctric as II
Seleccionará las máquinas y sistemas de protección para un control eficaz y eficiente de las configuraciones del generador o motor, previa descripción de su funcionamiento y justificación de los problemas asociados al empleo de los diferentes tipos de motores.
Describirá cómo se genera la corriente alterna en
sus distintas modalidades, así como el
funcionamiento y control de un generador de corriente alterna. Aplicará sus características de arranque y operación en forma general.
Aplicará los conceptos, características y
condiciones operativas para conectar los
generadores de corriente alterna en paralelo. Explicará su arranque, control, operación y medición de parámetros eléctricos; con carga eléctrica y en vacío.
Identificará los componentes del motor síncrono, así como sus principios de funcionamiento, arranque, control y aplicaciones dentro de un sistema de control.
Diferenciará los componentes de la máquina, su funcionamiento, aplicaciones, así como los diferentes tipos de conexiones monofásicas y/o trifásicas. Seleccionar la capacidad, protección primaria y secundaria en las situaciones que se le presenten en ejemplos tipo.
Identificará los elementos correspondientes a este tipo de máquina, así como el funcionamiento y a los circuitos básicos de operación, arranque y control;
seleccionando el empleo de dispositivos
electromagnéticos y/o electrónicos.
Ing. Alfredo Contreras Mondragón Tesis 23
Carrera Materia Competencias Específicas
C
ontrol de Má
quinas y P
roc
esos El
éc
tricos
Diseñará el control de Máquinas Eléctricas, bajo el análisis de elementos electromagnéticos, mecánicos, neumáticos, e hidráulicos en el contexto de los Sistemas de Procesos Eléctricos y de su influencia en la estabilidad de sistemas, a través de la regulación de los parámetros
fundamentales de funcionamiento e
implementación de protecciones.
Describirá el control electromagnético,
incluyendo: simbología, instalación eléctrica, interruptores, contactores, relevadores en general, elementos de sobrecarga y control, sus combinaciones, de mando y sus aplicaciones.
Describirá los diferentes elementos y circuitos de control del tipo electrónico en lo referente a su operación, construcción, selección; aplicados en el control de motores eléctricos.
Aplicará las técnicas de control de máquinas de corriente alterna, síncronas, asíncronas y de corriente directa, así como los elementos de control electromagnético y electrónico en el accionamiento y regulación en procesos industriales.
Diseñará circuitos Neumáticos e Hidráulicos
aplicados a sistemas de control
electroneumático y electrohidráulico a través de
elementos de mandos y control
electromecánicos y electrónicos.
Aplicará los conceptos del control
electromagnético, electrónico, neumático e
Ing. Alfredo Contreras Mondragón Tesis 24
P
lane
ac
ión e I
ng enier ía d e Man tenimi ento
Diseñará un Sistema de Mantenimiento Tradicional o Mantenimiento Productivo Total (T.P.M.) mediante la implementación de soluciones a problemas particulares, acordes a las necesidades específicas de la organización en estudio.
Describirá los diferentes tipos de mantenimiento y elaborará el esquema del mantenimiento productivo total.
Elaborará un sistema de mantenimiento con una visión sistémica para mejora continua en los sectores productivos o de servicios como medio para hacerlos más eficientes.
Diseñará un Sistema de Mantenimiento de acuerdo a las necesidades específicas de la
organización en estudio, aplicando las
herramientas técnicas.
Seleccionará las herramientas estadísticas y auxiliares necesarias que requiera aplicar en la implementación, implantación y control de un sistema de mantenimiento.
Determinará la viabilidad de un sistema de mantenimiento a través de un análisis económico.
Ing. Alfredo Contreras Mondragón Tesis 25
Carrera Materia Competencias Específicas
Eleme ntos p rimar ios de medic ión.
Seleccionará el instrumento de medición adecuado a cada variable de proceso industrial, previa interpretación del funcionamiento del sensor y de las necesidades de su aplicación específica.
Aplicará los principios en que se basan los elementos de medición como son: función, tipo,
error, transmisión, interpretación, y
determinación de criterios, en cada una de las tecnologías actuales de medición.
Aplicará los principios en los que se basan los diferentes elementos primarios de medición de presión y las tecnologías usadas para la medición y control, la determinación de las características para la selección, calibración, instalación y arranque.
Aplicará los principios en que se basan los diferentes elementos captores de temperatura y las tecnologías usadas para la medición y control, la determinación de las características para la selección, calibración, instalación y arranque.
Aplicará los principios en que se basan los diferentes sensores de flujo y las tecnologías usadas para la medición y control, la determinación de las características para la selección, calibración, instalación y arranque.
Ing. Alfredo Contreras Mondragón Tesis 26
Ing
eni
erí
a E
léctr
ic
a
Eleme
ntos d
e c
ontrol elé
ctrico.
Aplicará las bases matemáticas para diseñar modelos de sistemas físicos empleando ecuaciones diferenciales, funciones de transferencia, así como su representación gráfica a través de diagramas de bloque, analizará los sistemas en estado estable y transitorio, haciendo hincapié en los conceptos de estabilidad, precisión y tiempo de respuesta.
Identificará los conceptos básicos para el estudio de
los sistemas automáticos o de mando
retroalimentados.
Diseñará modelos matemáticos que representen con bastante aproximación el comportamiento de sistemas físicos.
Identificará las características de los controladores empleados usualmente en los sistemas de control. Determinará el comportamiento de los sistemas dinámicos en el dominio del tiempo, particularmente en régimen transitorio.
Empleará las técnicas de respuesta a la frecuencia para analizar sistemas dinámicos de control.
Aplicará el método de lugar de las raíces, para analizar y ajustar la ganancia en sistemas retroalimentados.
Ing. Alfredo Contreras Mondragón Tesis 27
Carrera Materia Competencias Específicas
Ing
eni
erí
a en
Si
st
em
as
A
ut
om
ot
ri
ces
S ist emas F lexibles de Manu fa ctura Describir e interpretar lo que es un Sistema
Flexible de Manufactura identifique los diferentes tipos de Sistema Flexible de Manufactura que existen en la actualidady ejercite sus habilidades de investigación por medio de los diferentes sistemas de acceso a la información con los que contamos en la actualidad. Aprender el software del Quest Delmia, para el desarrollo y aplicación de prácticas reales y virtuales.
Inge nier ía d e Manu fa ctur a I I
Aplicary desarrollar sus conocimientos para el funcionamiento de un sistema flexible de manufactura a través del desarrollo de cada una de las etapas que lo conforman.
Ing. Alfredo Contreras Mondragón Tesis 28
existentes en la educación sobre Sistemas Flexibles de Manufactura en la especialidad correspondiente, respecto a las carreras de ESIME- ZAC.
La simulación se estructura de forma integral en un entorno virtual (modelo), en función del software propuesto: QUEST de DELMIA, el cual consiste en desarrollar representaciones de forma gráfica de los diferentes procesos productivos. Este laboratorio propuesto aplicará alrededor de 25 prácticas virtuales por día (Anexo-A), de las cuales se presenta un ejemplo de ellas en el inciso 3.4.7, denominado: Práctica Virtual No. 1.
Como resultado de este análisis y con esta propuesta, se desarrolla la siguiente
Metodología:
La Metodología para concebir el Diseño del Modelo Conceptual, será lo que establece el Modelo Educativo por Competencia y el Modelo Virtual.
Sobre la base de los alcances mencionados de estos Modelos, se construyó la estructura o taxonomía de la flexibilidad de una celda de manufactura, que consiste en la clasificación de la flexibilidad propuesta para este tipo de sistema en la educación, apegado al modelo heurístico.
En la figura 11, se observan los niveles y subniveles considerados en la taxonomía propuesta con la finalidad de simplificar el análisis. Específicamente, el nivel por tomar en cuenta en las celdas de manufactura y de acuerdo con los alcances establecidos fue el nivel de proceso, dentro del cual se considera el sub-nivel operacional y, dentro de él, los diferentes tipos o dimensiones de flexibilidad por evaluar.
Los tipos de flexibilidad considerados fueron de acuerdo a las materias y prácticas que se presentan en el mapa curricular de ESIME-ZAC., coordinadas con las estaciones con que actualmente cuenta el Laboratorio de Robótica Industrial.
Ing. Alfredo Contreras Mondragón Tesis 29
FIGURA 11. CONCEPTUALIZACIÓN PARA EL DISEÑO DEL MODELO
Si tomamos como ejemplo, el Programa de Estudio de la materia de Control de Máquinas y Procesos Eléctricos, perteneciente al Departamento Académico de Ingeniería en Control y Automatización, las variables que van a ser evaluadas y sus porcentajes son los siguientes:
Evaluación, con tres exámenes departamentales y la participación del
alumno en clase, lo cual tendrá un valor del 60%. (Unidad I y II, del Programa de Estudio).
Cada alumno elaborará y entregará un reporte técnico por práctica de
laboratorio efectuada, y el promedio de las calificaciones obtenidas tendrá un valor del 50% (Unidad III, del Programa de Estudio).
DISEÑO DEL MODELO
NIVELES
NIVEL DE PROCESO
•Células Flexibles Modulares
•Atención a las Cuatro Especilaidades
•Simulación de Procesos Productivos
•Diseñar y Desarrollar Progranmas de Automatización
•Elaboración de Manual dePrácticas de Simulación
SUB-NIVELES
Sub-Nivel
•Modelo Actual (CIM)
•Modelo Propuesto(FMS)
•Operacional
•Estación de Enlatado
•Estación de Ensamble Electrónica
•Estación de Control y Monitoreo (HMI)
•Interfaces, entre otras.
TIPOS DE FLEXIBILIDAD
FLEXIBILIDAD EN LOS RECURSOS
•Flexibilidad en las Máquinas •Flexibilidad en los Procesos •Flexibilidad en el Control •Flexibilidad en los Códigos •Flexibilidad en las






![TABLA 4. METODOLOGIA PARA IMPLANTAR UN SISTEMA DE MANUFACTURA ESBELTA EN PLANTAS MEXICANAS [Bednarek y Niño, 2008].](https://thumb-us.123doks.com/thumbv2/123dok_es/5004662.77221/36.595.73.565.315.684/metodologia-implantar-sistema-manufactura-esbelta-plantas-mexicanas-bednarek.webp)
![FIGURA 9. MODELO VIRTUAL EMPLEADO EN LA DOCENCIA [E.M. Rubio, 2001].](https://thumb-us.123doks.com/thumbv2/123dok_es/5004662.77221/37.595.127.535.475.721/figura-modelo-virtual-empleado-en-la-docencia-rubio.webp)

