Rev
si
ta de
la I
ng
enie
rí
a In
dus
ti
ral
1
R
evis
ta de
la Ing
enie
rí
a In
dus
ti
ral
1
R
R
e
e
v
v
i
i
s
s
t
t
a
a
d
d
e
e
l
l
a
a
I
I
n
n
g
g
e
e
n
n
i
i
e
e
r
r
i
i
a
a
I
I
n
n
d
d
u
u
s
s
t
t
r
r
i
i
a
a
l
l
IISSSSNN11994400--22116633
A
A
c
c
a
a
d
d
e
e
m
m
i
i
a
a
J
J
o
o
u
u
r
r
n
n
a
a
l
l
s
s
.
.
c
c
o
o
m
m
V
V
o
o
l
l
u
u
m
m
e
e
n
n
5
5
,
,
N
N
o
o
.
.
1
1
,
,
2
2
0
0
1
1
1
1
C
Co
on
nt
t
r
r
o
o
l
l
ad
a
do
or
re
e
s
s
P
PI
I
D
D
y
y
C
C
o
o
n
n
tr
t
ro
ol
la
a
d
d
o
o
r
r
e
e
s
s
D
Di
if
fu
us
so
o
s
s
M.I. Alberto Pedro Lorandi Medina1, M.I. Guillermo Hermida Saba2, M.C. Enrique Ladrón de Guevara Durán3 y M.I. José Hernández Silva4
Resumen—A pesar de contar con casi 60 años de antigüedad, el control Proporcional–Integral–Derivativo
(PID) sigue siendo usado ampliamente en aplicaciones industriales, como referencia para estudios de comparación de desempeño contra nuevas estrategias de control, y como área de investigación y desarrollo, ofreciendo una buena alternativa para controlar procesos dinámicos, ofreciendo tiempos de respuesta rápidos y un proceso de ajuste relativamente simple. Por otro lado, el control lógico difuso basado en los trabajos desarrollados por Lofti Zadeh en los 60, también presenta características que lo hacen adecuado para él mismo fin, salvo que es capaz de ofrecer un comportamiento de control altamente flexible y ajustarse a condiciones cambiantes como condiciones de desgaste y cambios ambientales. En este trabajo se trata de mostrar como controladores P, PD, PI y PID debidamente ajustados, pueden ser superados en algunos aspectos por un simple controlador fuzzy tanto en desempeño como en simplicidad.
Palabras claves— Control PID, Control fuzzy, Desempeño de Controladores PID, Desempeño de Controladores fuzzy, Control fuzzy-PID.
Introducción
Como su nombre lo indica, el algoritmo de control PID consiste de tres modos básicos, el proporcional, el integral y el derivativo y cuando se usa esta técnica de control clásico, es necesario decidir cuales modos serán usados (P, I, o D) y especificar los parámetros o ajustes para cada uno de esos modos. Generalmente los algoritmos básicos usados son P, PI o PID, y existiendo una amplia variedad de formas y métodos de ajuste de este esquema de control. Sin embargo, a medida que se exige una mayor precisión en el sistema, el ajuste de este tipo de control se hace más difícil sobre todo por el ruido y cuando se presentan retardos, además cuando los procesos a controlar son no lineales y el control debiera tener la capacidad de compensar esas no-linealidades, el control PID no tiene la capacidad de responder a esto porque asume relaciones lineales.
El control lógico difuso por su parte surgió en los 60 (del trabajo de Lofti A. Zadeh), como una herramienta para el control de procesos industriales complejos, radicando su importancia en que permite responder a valores
intermedios, de variables, pasando de las dos opciones tradicionales de “frío/caliente”, “alto/bajo”, a opciones como “Tibio” y “Medio” por ejemplo, haciendo que los sistemas se acerquen a la forma de trabajar del cerebro humano. Por lo anterior, el diseño de controladores PID basados en lógica difusa, es motivado por la habilidad de estos de capturar estrategias cualitativas de control y ofrecer un comportamiento de control altamente flexible. Con esta forma de control, podremos lograr que los sistemas puedan ajustarse a condiciones cambiantes en ocasiones imposibles de predecir, lógico, dentro de ciertos rangos.
1 El Maestro Alberto Pedro Lorandi Medina es Investigador del Instituto de Ingeniería de la Universidad Veracruzana, Veracruz, México.
alorandi@uv.mx (autor corresponsal)
2 El Maestro Guillermo Hermida Saba es Investigador del Instituto de Ingeniería de la Universidad Veracruzana, Veracruz, México
ghermida@uv.mx
3 El Maestro Enrique Ladrón de Guevara Durán es Investigador del Instituto de Ingeniería de la Universidad Veracruzana, Veracruz, México
eladron@uv.mx
4 El Maestro José Hernández Silva es Investigador del Instituto de Ingeniería de la Universidad Veracruzana, Veracruz, México
Rev
si
ta de
la I
ng
enie
rí
a In
dus
ti
ral
2
R
evis
ta de
la Ing
enie
rí
a In
dus
ti
ral
2
Figura 1. Representación esquemática del modelo PID
PID Proceso + -Salida Ajuste Sensor Fusi-ficación Proceso + -Salida Sensor Ajuste Defusi-ficación Base de Conocimiento Inferencia Fuzzy
Control PID y Control Fuzzy
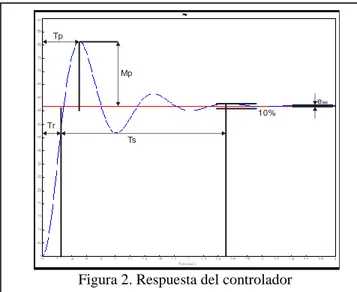
Figura 2. Respuesta del controlador
Mp Tp Tr Ts 10% eee
Comparación de los 2 Esquemas
En un sistema controlado por lógica difusa, el valor de entrada proveniente de los sensores, es convertido a un valor difuso mediante un proceso llamado “Fusificación5”. A continuación, ese valor es introducido a un proceso también
lógico difuso llamado “Mecanismo de Inferencia”, en donde continuamente es evaluado mediante un conjunto de reglas, provenientes generalmente del conocimiento de un experto o elaboradas de manera empírica; este proceso produce un valor de salida también difuso, el cual es transformado a una salida real, a través de un proceso llamado “Defusificación6”.
El valor de la salida del proceso de “Defusificación” es utilizado como señal de control o como entrada a un
actuador que es en realidad, quien se encarga de ajustar la salida del sistema. Los cambios en el sistema son medidos por los sensores y el proceso se repite nueva-mente.
Un control PID se basa en un modelo matemático riguroso de algún proceso lineal o lineal dentro de un rango. Estos modelos se desarrollan ya sea por Root-Locus, ubicación de polos, o algún otro método, y si la planta se puede representar por un sistema de primer orden con retardo como:
0
(-sT )
1
G(s)= e
(1+ sT)
El diseño del controlador puede ser realizado de manera empírica (sin conocimiento del modelo), mediante el método de Ziegler-Nichols o algún derivado de este, y se pueden asignar los coeficientes proporcional, integral y derivativo del controlador del sistema.
Un control PID lee un valor de entrada o del sensor de entrada, aplica los algoritmos de control, definidos y produce una salida
específica como señal actuante o como entrada a un actuador. La salida del sistema es medida por el sensor de entrada, y el proceso se repite indefinidamente.
Aunque a primera vista (Figura 1), el modelo PID puede parecer más simple, frecuentemente no es cierto. Los controladores difusos son en realidad más sencillos de realizar, más simples de describir, más rápidos de aplicar y pueden ofrecer mayor exactitud y mejor rechazo a perturbaciones en algunos casos.
Características de los dos Controladores
Ambos tipos de control puede ser ajustados sin el conocimiento previo del sistema, esto es, su ajuste se realiza sin conocer los verdaderos parámetros del sistema por lo que en este aspecto son muy similares y de ahí que sean tan utilizados. El controlador PID clásico tiene la forma:
t
p 0 d
i
1
u = K
e+
e
d
e
dt
dt +T
T
Rev
si
ta de
la I
ng
enie
rí
a In
dus
ti
ral
3
R
evis
ta de
la Ing
enie
rí
a In
dus
ti
ral
3
Tr Mp Ts eee
Kp Disminuye Aumenta Poco Efecto Disminuye
Ki Disminuye Aumenta Aumenta Elimina
Kd Poco Efecto Disminuye Disminuye Poco Efecto
Cuadro 1.
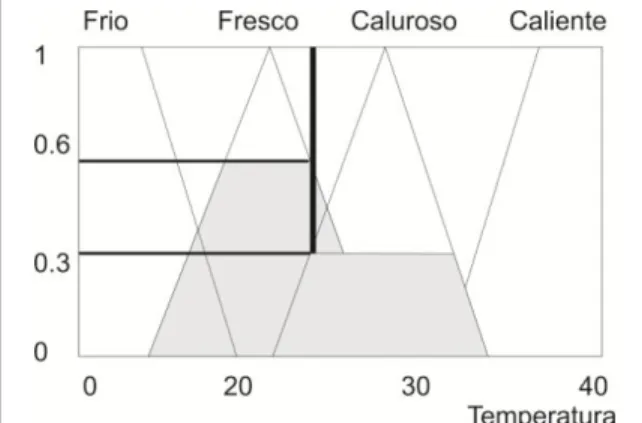
Figura 3. Ejemplo de valores lingüísticos
Figura 4. Ejemplo de defusificación En donde “e” es el error entre el valor de referencia y la salida del sistema, “u” es la salida del controlador, “Kp” la ganancia proporcional, “Ti” el tiempo integral, y
“Td” el tiempo derivativo, existiendo diversos métodos para ajustar los tres parámetros de interés, siendo el de Ziegler-Nichols el origen de todos ellos.
En este tipo de controlador, la ganancia Kp que afecta el componente proporcional, reduce el
tiempo de crecimiento y elimina “parte” del error estacionario, “Ki=1⁄Ti” que afecta el componente integral, elimina el error en estado estacionario pero puede tener como efecto secundario una afectación de la respuesta transitoria, y “Kd=Td” que afecta el componente derivativo, reduce el sobre pico y mejora la respuesta transitoria (Cuadro 1 y Figura 2).
En controladores digitales, la ecuación del controlador PID puede ser reemplazada por
n
s d
ji p
=1 s
e k - e k - 1
1
e
(k)= K
k +
e j T +T
T
T
Cambiando la derivada por una diferencia hacia atrás, la integral por una suma, y un tiempo de muestreo pequeño, siendo “k” el instante de tiempo.
El controlador difuso funciona como uno convencional puesto que a partir de la entrada, por medio de algún algoritmo, genera una salida, llamándose este proceso inferencia difusa y se lleva a cabo en tres partes:
Fusificación, donde la señal de entrada real es convertida en un valor difuso.
Evaluación mediante reglas, en donde los valores de la salida difusos se calculan.
Defusificación, donde el valor de la salida difusa se convierte a un valor de salida real.
En la fusificación, la diferencia con un esquema convencional es la manera en que la variable de entrada es considerada, en lugar de usar su valor, se usan funciones de membrecía. Por ejemplo, para la
temperatura de una habitación, los valores lingüísticos a utilizar podrían ser: frío, fresco, caluroso y caliente, pudiendo un valor de temperatura real, pertenecer a varios de estos valores con diferente grado de
pertenencias, como puede verse en la figura 3. En esta figura, la línea negra que representa una hipotética temperatura real, y tiene un grado de pertenencia a Fresco de 0.5 y a caluroso de 0.35.
La evaluación se hace con los valores anteriores y un conjunto de reglas que pudieran ser por ejemplo:
Si la temperatura es Fría, apagar el compresor del aire acondicionado y ajustar la velocidad de los ventiladores a muy baja.
Si la temperatura es Fresca, encender el compre-sor pero cambiar la velocidad de los ventiladores a baja
Rev
si
ta de
la I
ng
enie
rí
a In
dus
ti
ral
4
R
evis
ta de
la Ing
enie
rí
a In
dus
ti
ral
4
Variable Valor
e Neg Cero Pos
u Neg Cero Pos
Cuadro 2. Asociación difusa.
e
/e
Neg Cero PosNeg Neg Neg Pos
Cero Neg Cero Pos
Pos Neg Pos Pos
Cuadro 3. Tabla de asociación difusa
Si la temperatura es caliente, mantener encendido el compresor pero ajustar la velocidad de los ventiladores a velocidad alta
En la defusificación, la salida del sistema difuso se calcula mediante el disparo de las reglas correspondientes a un valor que depende del valor de pertenencia de la entrada, por ejemplo, ajustar la velocidad de los ventiladores a baja en un grado de verdad de 0.5 y a velocidad media con un grado de verdad de 0.35.
Lo anterior se puede hacer de varias maneras. Por ejemplo, se puede considerar el centro de gravedad de la figura geométrica resultante o sea, la suma de los dos rectángulos en color gris que se muestran en la figura 4 y de ese valor inferir la salida.
El Controlador Proporcional
Conforme a lo se muestra en la tabla 1, se puede ver que el controlador proporcional (Kp) reduce el tiempo de crecimiento, aumenta el sobre pico y reduce el error de estado estable. La función de transferencia de lazo cerrado de un sistema de segundo orden con la inclusión de un controlador proporcional será:
p
2 2
n n p
K
G s =
s + 2zw s + w + K
Siendo la señal de control u en función del error
p
u = K e
Y para el caso difuso, se puede asumir que la entrada (e) y la salida (u) del controlador, están determinadas por tres conjuntos difusos: Neg, Cero y Pos, teniendo al menos 3 posibles reglas para la
evaluación de la salida:
Si e = 0 ; u = 0
Si e > 0 ; u > 0
Si e < 0 ; u < 0
Lo que se representa con una tabla 2 de asociación difusa mostrada en el cuadro 2.
El Controlador Proporcional-Derivativo
Según lo mostrado en la tabla 1, el controlador derivativo “Kd” reduce el sobre pico y reduce el tiempo de
establecimiento. La función de transferencia en lazo cerrado de un sistema de segundo orden con la inclusión de un controlador proporcional-derivativo será:
d p
2 2
n d n p
K s + K
s =
s +(2zw + K )s + w + K
G
Siendo la señal de control u en función del error
p d
u
K e
K e
Donde “
e
” es el error y “e
”es el cambio en el error. Para el controlador difuso podemos considerar que:actual anterior
e = r - y
e = ce = e
- e
Se puede analizar la salida en términos de las 2 entradas y sus posibles combinaciones diferentes, por lo que se tiene (analizando la figura 2):
Si
e
>0 ye
>0; u > 0. Si
e
>0 ye
=0; u > 0. Si
e
>0 ye
<0; u > 0. Si
e
=0 ye
>0; u > 0. Si
e
=0 ye
=0; u = 0.Rev
si
ta de
la I
ng
enie
rí
a In
dus
ti
ral
5
R
evis
ta de
la Ing
enie
rí
a In
dus
ti
ral
5
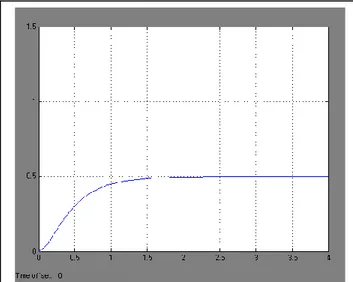
Figura 5. Respuesta del sistema.
Si
e
<0 ye
>0; u < 0. Si
e
<0 ye
=0; u < 0. Si
e
<0 ye
<0; u < 0Todo lo anterior se puede representar con una tabla de asociación difusa mostrada en el cuadro 3.
El Controlador Proporcional-Integral
De la misma manera que para el caso del control PD, de la tabla, puede verse que un controlador integral “Ki” disminuye el tiempo de crecimiento, aumenta tanto el sobre pico como el tiempo de establecimiento, y elimina el error en estado estable. La función de transferencia de lazo cerrado con la adición del controlador integral es:
3 2 2
( )
2
(
)
p i
n n p i
K s
K
G s
s
s
K
s
K
Siendo la señal de control u en función del error
p i
u = K e+ K e
Para el controlador difuso se podría hacer lo mismo que para el control PD lo que nos llevaría a un juego de reglas mayor por las tres variables a considerar, o también se podría incluir un integrador a la salida del error y alimentar un segundo controlador difuso proporcional, sumando su salida al primer controlador difuso proporcional para obtener un control PI.
El Controlador Proporcional-Integral-Derivativo
Finalmente, el controlador PID tiene una función de transferencia en lazo cerrado de:
d 2 p
i
3 2 2
n d n p i
K s + K s + K
G s =
s +(2zw + K )s + w + K
s + K
Siendo la señal de control
p d i
u
K e
K e
K e
Y para el caso difuso, se procedería como en el caso del controlador PD pero considerando las 3 entradas difusas, esto es se tendría que construir una tabla de reglas mucho más grande.
Análisis de los cuatro casos
A continuación se muestra una comparación entre un control continuo y uno fuzzy, de los 4 casos posibles de controladores, P, PD, PI y PID, en Matlab usando la caja de herramientas fuzzy, y considerando una planta dada por
210
10
20
G s
s
s
La respuesta en lazo abierto de esta planta a una entrada escalón está mostrada en la figura 5 en la que se puede ver que el error en estado estacionario es del 50%, y que el sistema es sobre amortiguado.
Diseño del controlador Proporcional y Difuso
Proporcional
Rev
si
ta de
la I
ng
enie
rí
a In
dus
ti
ral
6
R
evis
ta de
la Ing
enie
rí
a In
dus
ti
ral
6
Figura 6. Control P y Fuzzy P. Figura 7. Controlador Fuzzy P.
Figura 8. Entrada “e”. Figura 9. Salida “u”.
muestra en la figuras 7, 8, 9, 10 y las respuestas de ambos controles en las figuras 11 y12.
Diseño del controlador Proporcional Derivativo y Difuso Proporcional-Derivativo
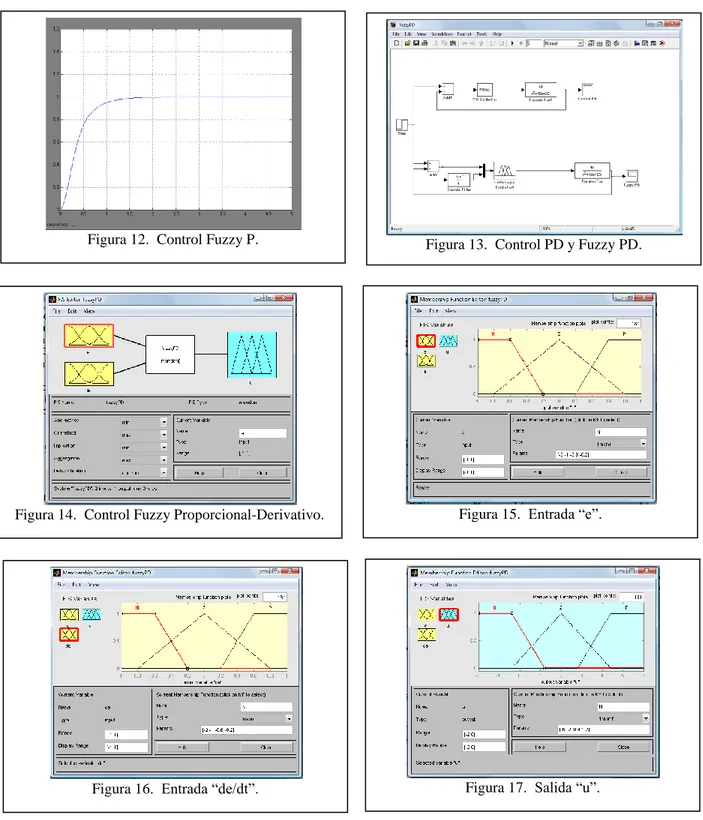
El modelo del sistema tanto para un control PD como para un fuzzyPD en Matlab es el mostrado en la Figura 13. Para el control proporcional derivativo en el caso continuo, tampoco es posible eliminar el error en estado estacionario, y para este caso se usaron ganancias de 30 para la parte proporcional y 1 para la parte derivativa. Para el caso del control difuso PD, también es posible eliminar el error en estado estacionario y el diseño usado para este caso se muestra en las figuras 14, 15, 16, 17 y 18 y las respuestas de ambos sistemas en las figuras 19 y 20.
Diseño del controlador Proporcional-Integral y Difuso Proporciona-Integral
El modelo del sistema tanto para un control PI como para un fuzzy PI en Matlab es el mostrado en la Figura 21. Para el control proporcional integral en el caso continuo, sí es posible eliminar el error en estado estacionario, para este caso se usaron ganancias de 3 para la parte proporcional y 7 para la parte integral. Para el caso del control difuso PI,
Rev
si
ta de
la I
ng
enie
rí
a In
dus
ti
ral
7
R
evis
ta de
la Ing
enie
rí
a In
dus
ti
ral
7
Figura 10. Reglas. Figura 11. Control Proporcional
Diseño del controlador Proporcional-Integral-Derivativo y Difuso Proporciona-Integra-Derivativo
Por último se muestran los resultados y el diseño del controlador PID continuo y el caso PID Difuso, en el que el diseño continuo sí supera al diseño difuso aunque presenta un comportamiento transitorio un poco diferente a lo que siempre se ve en una respuesta dinámica de un sistema.
El modelo del sistema tanto para un control PID como para un fuzzy PID en Matlab es mostrado en la figura 29, que como se dijo, para el control proporcional Integral Derivativo del caso continuo, sí elimina el error en estado estacionario. El sistema tiene un tiempo de respuesta muy rápido y no existe sobre tiro, para este caso se usaron ganancias de 35 para la parte proporcional y 30 para la parte integral y 5 para la parte derivativa.
Para el caso del control difuso PID, también es posible eliminar el error en estado estacionario, obteniendo una respuesta bastante aceptable pero con un sobre tiro pequeño. Esto podría mejorar ajustando el controlador o usando más funciones de pertenencia (solo se usaron 3 en todos los casos), y el diseño usado para este caso se muestra en las figuras 30, 31, 32, 33, 34 y 35 y las respuestas de ambos sistemas en las figuras 37 y 38.
Resultados y Conclusiones
Como puede observarse, en casi todos los casos un controlador difuso puede llegar a ser superior a un controlador PID continuo, si bien es cierto esto depende de la planta, del método de ajuste del PID tradicional y de algunas otras características de la estructura del controlador PID. No deja de llamar la atención que un controlador difuso puede llegar a ser una excelente opción para suplir un PID tradicional.
Una ventaja considerable del controlador difuso es que aún en el caso de un control proporcional, puede llegar a eliminar el error en estado estacionario, cosa que no puede hacer un control P tradicional o un controlador lineal de otro tipo.
Una ventaja del controlador fuzzy PID es que no se requiere conocer el modelo de la planta a controlar aunque el control PID también puede llegar a ser diseñado sin conocer este modelo, y en este caso, ambos pueden ser usados con ajustes experimentales para rápidamente dejar un sistema cumpliendo con los requerimientos necesarios.
Aún es el caso donde el PID tradicional fue muy superior al fuzzy PID, el primero presenta a veces comportamientos indeseables en la salida, como las variaciones que pueden apreciarse en la curva correspondiente mientras que el difuso presenta una salida más suave y sin transitorios bruscos.
Rev
si
ta de
la I
ng
enie
rí
a In
dus
ti
ral
8
R
evis
ta de
la Ing
enie
rí
a In
dus
ti
ral
8
Trabajos Futuros
No se probaron controladores difusos con más de 3 funciones de pertenencia que pudieran mejorar aún más el desempeño, esto queda pendiente para trabajos futuros y para un estudio comparativo de control PID digital, continuo y fuzzy.
También en el desarrollo de este pequeño análisis, se encontraron pocas herramientas amigables para diseño de sistemas difusos, inicialmente se pensó en usar Scilab pero no se ha continuado con el desarrollo de las pocas herramientas de diseño fuzzy como Fislab, por lo que se usó Matlab.
Por lo anterior queda también como trabajo futuro el desarrollo de una pequeña herramienta de diseño de sistema fuzzy para Scilab o la adecuación de Fislab a la rama 5 de Scilab/Xcos.
Referencias
Al-Odienat, A. I. ”The Advantages of PID fuzzy Controllers Over The Conventional Types”, American Journal of Applied Sciences 5 (6): 653-658, 2008.
Ileana, J. , Estoeneusco, E. , Lung, M. “Comparative Analysis Of Classical And fuzzy Pi Algorithms”, 7th Wseas Int. Conf. On Artificial Intelligence, Knowledge Engineering And Data Bases (Aiked'08), University Of Cambridge, Uk, Feb 20-22, 2008
Jantzen, J. “Foundations of fuzzy Control,” John Wiley & Sons, Ltd. ISBN: 0-470-02963-3, 2007.
Jantzen, J. “Tuning Of fuzzy PID Controllers”, Technical University of Denmark, Department of Automation, Bldg 326, DK-2800 Lyngby, DENMARK. Tech. Report no 98-H 871 (fpid), 30 Sep 1998
Lorandi, M.A. “Diseño de un Controlador Lógico Difuzo para un Péndulo Invertido” Universidad Veracruzana, Instituto de Ingeniería, Tesis de Maestría, Dic. 1990.
Pivonka, P. , Blaha, P. “Comparative Analysis Of Classical And fuzzy Pid Control Algorithms”, Technical University of Brno, Faculty of Electrical Engineering and Computer Science Department of Automatic Control and Instrumentation.
Roger, J. S., Gulley, N. “MATLAB fuzzy Logic Toolbox”, The MathWorks, 1997.
Volosencu, C. “Pseudo-Equivalence of fuzzy PID Controllers, Wseas Transactions On Systems And Control, Issue 4, Volume 4, April 2009
El M.I. Alberto Pedro Lorandi Medina estudió la licenciatura en Ingeniería Mecánica Eléctrica en la Universidad Veracruzana, donde posteriormente se graduó como Maestro en Ingeniería. Actualmente es profesor de tiempo completo del Instituto de Ingeniería de la Universidad Veracruzana.
El M.I. Guillermo Hermida Saba estudió la licenciatura en Ingeniería Industrial en Electrónica en el Instituto Tecnológico de Veracruz. Posteriormente se graduó como Maestro en Ingeniería en la Universidad Veracruzana. Actualmente es profesor de tiempo completo del Instituto de Ingeniería de la Universidad Veracruzana, donde
El M.S.I. José Hernández Silva estudió la licenciatura en Ingeniería Industrial en Electrónica en el Instituto Tecnológico de Veracruz, Maestría en Sistemas de Información por la Universidad Mexicana y estudios de posgrado en Arquitectura y Tecnología de los Sistemas por la
Universidad Politécnica de Valencia, España. Actualmente es profesor de medio tiempo del Instituto de Ingeniería de la Universidad Veracruzana.
Rev
si
ta de
la I
ng
enie
rí
a In
dus
ti
ral
9
R
evis
ta de
la Ing
enie
rí
a In
dus
ti
ral
9
Figura 12. Control Fuzzy P. Figura 13. Control PD y Fuzzy PD.
Figura 14. Control Fuzzy Proporcional-Derivativo. Figura 15. Entrada “e”.
Rev
si
ta de
la I
ng
enie
rí
a In
dus
ti
ral
10
R
evis
ta de
la Ing
enie
rí
a In
dus
ti
ral
10
Figura 18. Reglas del Control Fuzzy PD. Figura 19. Control Proporciona-Derivativo.
Figura 20. Controlador Fuzzy PD. Figura 21. Control PI y Fuzzy PI.
Rev
si
ta de
la I
ng
enie
rí
a In
dus
ti
ral
11
R
evis
ta de
la Ing
enie
rí
a In
dus
ti
ral
11
Figura 26. Reglas del Control Fuzzy PI. Figura 27. Control Proporcional-Integral.
Figura 28. Control Fuzzy PI. Figura 29. Control PID y Fuzzy PID.
Figura 24. Entrada “integral de e”. Figura 25. Salida “u”.
Rev
si
ta de
la I
ng
enie
rí
a In
dus
ti
ral
12
R
evis
ta de
la Ing
enie
rí
a In
dus
ti
ral
12
Figura 30. Controlador Fuzzy PID. Figura 31. Entrada “e”.
Figura 32. Entrada “de/dt”. Figura 33. Entrada “integral de e”.
Figura 34. Salida “u”.
Rev
si
ta de
la I
ng
enie
rí
a In
dus
ti
ral
13
R
evis
ta de
la Ing
enie
rí
a In
dus
ti
ral
13
Control Sobre-pico Error en e.e
T. de estable- cimiento
P 0 % 26 % 1.0 seg.
Fuzzy P 0 % 0 % 1.25 seg.
Cuadro 4. Control P y Fuzzy P.
Control
Sobre-pico
Error en e.e
T. de estable- cimiento
PD 9 % 6 % 0.5 seg.
Fuzzy PD 2 % 0 % 1 seg.
Cuadro 5. Control PD y Fuzzy PD.
Control Sobre-pico Error en
e.e
T. de estable- cimiento
PI 1 % 36 % 2.5 seg.
Fuzzy PI 1.5 % 0 % 1.8 seg.
Cuadro 6. Control PI y Fuzzy PI.
Control
Sobre-pico
Error e.e
T. de estable- cimiento
PID 0 % 0 % 1 seg.
Fuzzy PID 1.5 % 0 % 1 seg.
Cuadro 7. Control PID y Fuzzy PID.