?J-
oq.Lac'7'
I
6qO
It'd
UNIVERSIDAD TECNICA PARTICULAR DE LOJA
La Universidad Católica de Loja
"ESCUELA DE INGENIERIA CIVIL"
ESTUDIO DE LOS METODOS DE LINEARIZACION,
USADOS EN LOS METODOS DE DISE1O SISMO
RESISTENTE DE ESTRUCTURAS
TEStS DE GRADO PREVIA A LA
OBTENCION DEL TITULO DE
INGENIERO CIVIL
AUTOR:
MIGUEL VLADIMIR MORENO ARMIJOS
DIRECTOR:
Dr. VINICIO SUAREZ CHACON
Loja, 30 de Octubre del 2008
Dr.
Vinicio Suarez ChacOn Docente Investigador
CERTIFICO:
Haber efectuado la revisiOn y correcciOn de la Tesis "ESTLJDIO DE LOS
METODOS DE LINEARIZACION, USADOS EN LOS METODOS DE
DISENO SISMO RESISTENTE DE ESTRUCTURAS"; la misma que
cumple con (as recomendaciones y sugerencias; razón por la cual autorizo la presentaciOn de (a misma para los fines legales pertinentes.
Muy atentamente
CESION DE DERECHOS
Yo, Miguel Vladimir Moreno Armijos, declara conocer y aceptar la disposiciOn del articulo 67 del estatuto orgãnico de la Universidad Técnica Particular de Loja, que en su parte pertinente textualmente dice: "Forman parte del patnmonio de la Universidad la propiedad intelectual de investigaciones, trabajos cientificos o técnicos, tesis de grado que se realicen a través, o con el apoyo financiero, academico, o institucional operativo de la universidad".
Miguel Vladimir Moreno A.
AUTORIA
El proceso de investigaciOn que se ha realizado en esta tesis como: análisis,
verificaciones, comprobaciones, conclusiones y recomendaciones, asI tambiéri
coma observaciones son de absoluta responsabilidad del autor.
AGRADECIMIENTOS
Al concluir ml tema investigativo me queda una gran satisfacciOn de haber
colaborado en ésta amplia e interesante rama de la Ingenieria Civil como 10 es
el area de Estructuras, en la cual existe un amplio avance cientifico por medlo
de quienes to dirigen, es por eso que de la manera más sincera agradezco al
Dr. Viniclo Suárez ChacOn, por la ayuda recibida en la direcciOn de ml tesis; la
cual no hubiera sido posible concluir sin su vatioso aporte, además agradezco a
la Universidad Técnica Particular de Loja, a la Escuela de Ingenieria Civil y a la
Unidad de Ingenieria Civil, Geologia y Minas (U.C.G), por la facilidad briridada
en su infraestructura y demás beneficios prestados, en este proyecto
investigativo
Además agradezco a los companeros y amigos que colaboraron y bnndaron su
apoyo en el Laboratorlo de Simulaciôn de Estructuras como lo son: José
Hurtado y Adriana Ayala, como muchas personas más que sin estar
nombradas las tengo muy presentes
El Autor
DEDICATORIA
Por el gran apoyo recibido de ellos, en todas las etapas de mi vida, le dedico
con todo mi afecto este trabajo a ml familia: Leoncio Moreno mi padre, Maria
Armijos mi madre, Leoncio, Judith, Marisol, Lucia y Dunia, mis hermanos
CONTENIDO
Capitulo I DESCRIPCION GENERAL DEL PROYECTO
1.1 lntroducciOn
1.2 Definiciôri del problema.
1.3 Objetivo y propOsito
1.4 Diseño metodolOgico
Capitulo 2 ESTUDIO DE LOS METODOS DE LINEARIZACION, USADOS EN
LOS METODOS DE DISENO SISMO RESISTENTE DE
ESTRUCTURAS
2.1 Resumen
2.2 IntroducciOn
2.3 Fundamentos del DDBD
2.4 Proceso del anälisis de una pila
2.4.1 Amortiguamiento viscoso equivalente 2.4.2 ObtenciOn de la curva de amortiguamiento 2.4.3 Resumen de la curva de amortiguamiento
CapItulo 3 APLICACION PRACTICA
3.1 Datos generales de diseño
3.2 Análisis estático
3.3 Análisis cclico
3.4 Análisis ITHA
3.3 Análisis comparativo de resultados
Capitulo 4 CONCLUSIONES Y RECOMENDACIONES
4.1 Conclusiones
4.2 Recomendaciones
REFERENCIAS
ANEXOS
CAPITULO
I
'Miguel Vladimir Moreno Armijos CAP! TULO I Estudlo de los mEtodos de !inearización, usodos en /as métodos de diseflo sismo resistente de estructur as
1.1 DESCRIPCION DEL PROYECTO
En la presente investigaciOn se hace una comparaciOn del amortiguamiento viscoso equivalente por dos métodos. El primer método que se 10 ha denominado Método de areas que parte de la representación grafica entre cortante y el desplazamiento como se puede observar en la [Figura 2.3]. For medios graficos se obtiene el area de la curva correspondiente a la disipaciOn de la Energia. El area del rectangulo que corresponde a la energia elâstica almacenada. Para finalmente obtener el amortiguamiento histerético con la [Ec.2.3]. Este análisis se lo conoce como aproximación de Jacobsen. Siendo uno de los métodos de aproximaciôn más sencillos, Blandon (2004) [1].
El segundo método que consiste en hacer un anátisis no lineal de histona en el tiempo (ITHA). Aplicando a la pila un acelerograma para determinar su desplazamiento inelástico, periodo, y rigidez. Para la determinación del amortiguamiento se hace un anáhsis lineal de historia en el tiempo con los parámetros anteriores. Por medlo de interacciones, hasta que el desplazamiento elástico sea igual at desplazamiento ineléstico. Aplicando un factor [Ec.3.3]. En el cual el amortiguamiento equivalente es igual al amortiguamiento histerético.
El proceso es realizado con el uso de la herramienta computacional OPENSEES, y ci proceso lOgico de VISUAL BASIC
1.2 DEFINICION DEL PROBLEMA
Existen varios métodos de aproximaciOn de amortiguamientos. De los cuales se considera la aproximaciOn de Jacobsen y un análisis no lineal de historia en el tiempo (ITHA). Los cuales son analizados por Dwain (2004) [2]. Obteniendo dos curvas de amortiguamiento [Figura 2.6]. Resultando que el amortiguamiento equivalente histerético (Areas) es mayor at amortiguamiento equivalente elästico (ITHA) para un mismo rango de ductilidad.
En este proyecto se hará un análisis similar at descrito anteriormente.
Miguel Vladimir Moreno Armjos CAPITUW I
Estudio de los métodos de Iinearización, usodos en los métodos de diseio sismo resistente de estructuras
1.4 OBJETIVO
1.4.1 OBJETIVO GENERAL
• Comparar el amortiguamiento equivalente por medio del método de areas y el método de análisis de historia en el t;empo (ITHA).
1.4.2 OBJETIVOS ESPECIFICOS
- Obtener la curva de amortiguamiento equivalente por medlo de métodos
complementarios.
1.5 DISEJO METODOLOGICO
Para el presente estudio se Ilevaron a cabo las siguientes etapas:
1.5.1 Se recopilO informaciOn sobre los métodos de Iinearización, usados en los metodos de diseño sismo resistente de estructuras, y conocer las
herramientas computacionales OPENSEES y VISUAL BASIC
1.5.2 En la primera etapa se recogiô informaciOn de los diferentes tipos de pilas en los cuãles varia la geometria, secciones de los elementos estructurales, materiales, propiedades de la estructura.
1.5.3 Una vez definida la pila se realizO un análisis pushover estático para determinar el desplazamiento de fluencia
1.5.4 Una vez obtenido el desplazamiento de fluencia se hace un análisis pushover ciclico y paralelamente un análisis no lineal de historia en el tiempo mediante la herramienta computacional OPENSEES.
1.5.5 Con los datos obtenidos y por medio del software VISUAL BASIC se
procede a Ia obtenciOn de la ductilidad y el amortiguamiento para ambos métodos y se los coloca en una grafica como puntos de dispersion.
CAPITU LO
It'
ESTUDIO DE LOS METODOS DE
LINEARIZACION, USADOS EN LOS
MI god 7odi,,,i Io,'.o,o A ,,,,jos. C4PI7T70 11
Esfldio dc/os ,nërodos de l,neon:aciOn, usados en los rn/fodos dc diseño sono resIstente c/c estrucfcuics
ESTUDIO DE LOS METODOS DE LJNEARJZAC!ON, USADOS EN
LOS METODOS DE DISE10 SISMO RESISTENTE DE
ESTRUCTURAS
Miguel Vladimir Moreno Armijos1, Vinicio A.
Suárez Chacon2
Profesional en formación de Ia Escueia de IngenierIa Civil de la Universidad TécnicaParticular de Loja, Loja-Ecuador, rnvmorenopLedueq. Director de Ia Unidad de Ingenieria Civil Geologia y Minas de Ia UTPL.
2.1 RESUMEN
El DDBD propone una altemativa prâctica at diseño sismo resistente. En et DDBD se toma en cuenta que un movimiento sismico está más relaconado con un desplazamiento que con una fuerza. En el DDBD las estructuras son diseñadas para que la capacidad de deformaciOn sea mayor a igual a la demanda, y por 10 tanto el nesgo de daño disminuya.
En la presente investigaciOn se obtiene una grafica de amortiguamiento a partir de dos métodos: El primer método denominado método de areas (AproximaciOri de Jacobsen). El segundo método es resultado de un análisis no lineal de histona en el tiempo (ITHA). Los dos métodos se los ha realizado por medio del programa OPENSEES y con la ayuda del proceso logico del software VISUAL BASIC. La comparaciOn de amortiguamientos descrita por Dwairi (2004) [2], es en cambio realizada con el programa RUAUMOKO, por medio del modelo histerético de Takeda, usando un coeficiente de amortiguamiento para un modelo no lineal.
2.2 INTRODUCCION
El Diseño sismo resistente de estructuras en la actualidad presenta varias ventajas debido a una mejor apreciaciOn respecto a los indicadores de daño. La ventaja principal es la obtencion més ajustable a la realidad de parámetros tales como ductilidad, amortiguamiento, energia de disipaciOn, los cuales son necesanos para determinar la eficiencia de las estructuras.
En la actualidad contamos con herramientas computacionates muy prácticas como el OPENSEES, la cual nos facihta la obtenciôn de los parámetros expuestos anteriormente. Una de las multiples ventajas que presenta as la de dividir la secciOn en fibras, para analizarlas como elementos no Jineales.
1_0
Fsç I I /
fi g.tl '/difrM e Ax. C4PiTLLO 11
Ext uSia Se lox métodos de linean:aciOn, —dos en lox métodos de dzseño s,xno resistente Sc estrucOnc
2.3 FUNDAMENTOS DEL DDBD.
El diseño Directo Basado en Desplazamientos DDBD ha sido desarrouado como una herramienta para el diseño sismico por desempeno de estructuras. DDBD se fundamenta en el método de linearizaciOn equivalente propuesto par Shibata y Sosen (1976) [3]. En DDBD la estructura inelástica en su máximo desplazamiento es reemplazada por un sistema elástico de un grado de hbertad (SDOF), que es equivalente por el uso de rigidez secante al punto de respuesta maxima Figura 2.2 (b), El DDBD es desan'ollado y descnto en gran detalle por Priestley y Kowalsky[4]. Su aplicaciOn se basa en partir de un desplazamiento deseado para luego transformar la estructura real en una estructura sustituta (Shibata y Sozen 1976) [4], [Figura 2.1 (a)], de un grado de libertad (SDOF).
(a) Estructura real (b) SDOF (c) LinearizaciOn equivalente
FIGURA 2.1. CaracterizaciOn de una estructura equivalente a un SOOF
Los principales pasos en la aplicaciOn de DDBD para puentes son:
1) Dimens'or.am'ento previo de la estructura
2) DeterminaciOn de parãmetros como: deformaciOn unitaria, curvatura, ductilidad, desplazamiento o efectos P-Delta y formas modales (Dwain y Kowalsky, 2005) [5].
3) DefiniciOn del sistema equivalente de un grado de libertad, que incluye la determinación del amortiguamiento viscoso equivalente Dwairi et al. (2005) [6]; Blandon y Priestley (2005) [7]; Suarez y Kowalsky (2006) [8].
4) DeterminaciOn de la rigidez y resistencias requeridas para alcanzar el desempeno propuesto en el paso 2
5) En elementos estructurales, como la pila se hace interacciones con respecto de sus sub elementos: refuerzo longitudinal y transversal debido a su naturaleza flexible.
Mig! V 7advmrMomwA rmV m CAPITTJLO II
E.,dio ik Iof ,,,éwdo, d. uado m k.. ,,,Etod de ditho ,i de ewa,
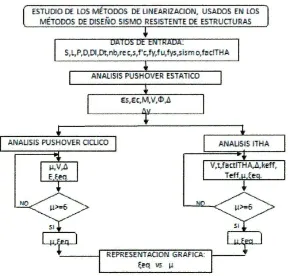
2.4 PROCESO DEL ANALISIS DE UNA PILA
ESTUDJO DE LOS METODOS DE LINEARIzAaON, USADOS EN LOS METODOS DE DISEJO SSMO RESISTENTE DE ESTRUCTURAS
S,L,PD,D!,DT,nb,rec,s,fc,fy,tu,fys,sism o,fc!THA
£5,EC,MV
ANALiSIS PUSHOVER CICLICO
I
I
ANAUSIS ITHASI 51
eq vs ji
AGURA L2 Fhograma del proceso de anis de ima plin
2.4.1 Amortiguamiento viscoso equivalents
[image:15.574.161.449.112.388.2]El amortiguamiento viscoso equivalente se usa para representar la energia
disipada por la estructura en un rango inelástico, el cual es obtenido por media de
dos métodos: análisis pushover cIdico y análisis ITHA como se observa en la
figura 2.2, los procesos de análisis se detallan a continuaciOn:
2.4.1.1 AMliSIS pushover estàtico
El análisis pushover estático consists an aplicar una carga lateral, que es
aplicada gradualmente en una direcciOn haste el colapso de la estructura.
El análisis pushover estático nos da coma resultado los siguientes parámetros:
defonnacion en el acero (Es), deformación en el concreto (Ec), cortante (V),
momento (M), curvature ($) y desplazamiento (is).
CA PIIULO ii
L'nutho cit los rnEtodos cit linearizacicin, usados en los mitodos cit diseflo sisyno resistente de esiructuras
Una vez ob
tendos los resuttados del anhss estático, apflcamos el sgu:ente
procedimiento:
PASO 1: Desplazamiento de fluencia
Una vez obtenidos los parámetros necesarios en el análisis estático segün ia
figura
2.2continuamos con el siguiente proceso de cálculo:
a)
Interpolamos el momento de fluencia (M') con una deformaciOn en el acero
(Es)
a 0.002
b)
Interpolamos la pnmera curvatura do fluencia (4') con una deformaciOn en el
acero
(Es)a 0.002.
C)
Interpolamos el momento nominal (Mn) con una deformaciOn en el concreto
(Ec)
a 0.004
d)
La curvatura de fluencia
(4y)
la obtenemos con la siguiente ecuaciOn:
(2.1)
e)
El desplazamiento de fluencia to obtenemos con la curvatura de fluencia
dada antenormente.
PASO 2: Ductilidad del Elemento
La ductiUdad ji) es un indicador de daño y disipación de la energia en La
estructura, so caicuta dividiendo el desplazamiento máximo
(Am)para el
desplazamiento de fluencia (z), este Ultimo valor es obtenido del PASO 1.
(2.2)
Ijel lodnfrMo,eno A'nijos. C4PiJ'ULO ii list udio de los mdfodos St lineorizacén, usados en los métodos tie diseflo simlo resistente tie esrructw'as
El desplazamento màximo (A) corresponde al valor de la abscisa más alejada del diagrama como observamos en la figura 2.3, parámetro que deperide de Ia carga lateral aplicada.
2.4.1.2 Análisis pushover ciclico
El análisis pushover cictico consiste en aplicar una carga lateral, que es aplicada gradualmente en ambas direcciones hasta liegar al colapso de la estructura.
Para realizar el análisis pushover ciclico se sigue el siguiente procedimiento:
a) Se inipone al elemento una ductilidad de 1 a 6 (Blar'tdon (2004) [1]).
b) Una vez impuesta la ductilidad obtenemos el desplazamiento máximo ()
despejándolo de la ecuación 2.2. El desplazamiento mãximo (Am
.
) esaphcado a la pila en ambas direcciones positivo y negativo, hasta lograr la estabilidad del ciclo histerético.
C) Se real iza un aniisis por cada valor de ductUidad.
El análisis pushover ciclico da como resultado la a
p
roximaciOn delamortiguamiento histerético segun Jacobsen, siendo básicamente la representaciôn grafica entre el cortante (V) y el desplazamiento () como se aprecia en la figura 2.3 (Dwairi (2004) [2]),
ry
:-7
/e--
T
TT
FIGURA 2.3 Aproximacion del amortguamiento histerético, segün Jacobsen.
Donde: A2 es el area de la curva que corresponde a la energIa disipada, Al es 01 area del rectangulo que corresponde a la energia almacenada.
0.6 0.4 0,2 0 -0.2 -0-I
a(m/s')
Zt4ig,d CA P/TULO II
E,4io d Jo, ,,,Jtoda, de Ii,o,,, ,,ado, en A . ,,,étodo, de diu,3, ,,o re,i.,,te de
d) El amortiguamiento histerético se 10 calcula con Pa ecuación propuesta en la
aproximación de Jacobsen (Dwain (2004) [2]), mostrada a continuaciOn:
24
(2.3)
- ,z.
A;2.4.1.3 Anélisis no lineal de historia on al tiempo (ITHA)
A través del análisis no lineal de histona en el tempo se considera
simultáneamente los efectos de la no linealidad del comportamiento de los
matenales, el equilibrio de Ia estructura
en su configuracon
deformada ylos
efectos estructurates de [as deformaciones diferidas del hormigon, siendo el
análisis más
real que podemos realizar sobre una estructura Dwain (2004) [2].
El procedimiento del ITHA se detalla a continuación:
PASO
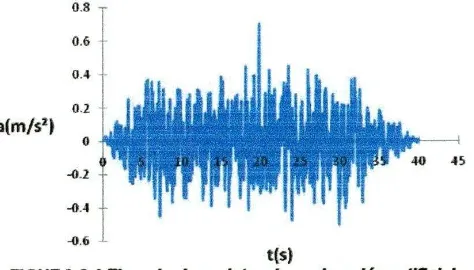
1:Registro de aceleraclón
En este paso
somodela una estructura con un registro de aceleración ya ocurrido
para conocer Pa respuesta de dicha estructura. El registro de aceleraciones puede
ser obtenido también artificialmente por medio de diferentes programas
0.8
-0.6
[image:18.574.184.421.429.564.2]t(s)
FIGURA 2.4 Ejemplo de registro de aceleraclón artificial
PASO 2: Resultados del ITHA
Realizando el análisis no lineal de histona en el tiempo (ITHA) por medio del
software OPENSEES obtenemos los siguientes parámetros: tiempo (t), cortante
(V), desplazamiento (a).
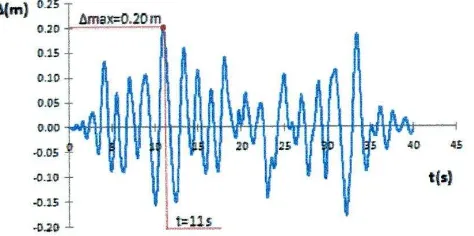
Las grallcas que
somuestran a conlinuación corresponden at ejercicso cuyos
datos y proceso de cálculo se detallan en el CAPITULO Ill.
6(m) 025 020 0-Is 0.10 0.05
0.00
-0.05 -0 aD
.0.15 -0.20
V(MN) 0.50 0.40 0.30 0.20 0.10 0.00 -0.10 -0.20 .0.30 -0,40 -0.50
5
'DMigd V hdb,,fr Mor,,o A rmj. CA PITULO 11
Eo dr Im jW W w d .,. j , mitodw de duP ,i,,o decsft^lwm
[image:19.574.172.409.76.194.2]flGURA 2.5 EJemØo do la oncIdn del deoØaznlento máxhno do la pla analzada can el reØs*ro do ace4eraci6n do In figura 2A
FIGURA 2.6 EJemØo do Ia od1cln dl c el On is en 1*mJOn del desplaamIefO màxIaio
aplcendo
el registro do ace4eracl6n do la figura
2.40. so
V(MN)
0.40
0.30 0.20
-v.2 -0.15 0.05 0.1 0.25 0.2
A(-)
-0.40
[image:19.574.178.415.264.388.2]-0.50
FIGURA 2.7 EemØo do Ia reple 9 Ica del cc,laI*e yel delplazamienb.
El archivo correspondiente a este análisis se especifica en el ANEXO 4
Miguel l7ndirnir1Ioreno Arnfos. CAPITULO II listSio de Los métodin tie tineanzación, usados en Los métodos de diseño sino resistente tie estructuras
PASO 3: Rigldez efectiva
Una vez obtenidos los parámetros del PASO 2, se encuentra el desplazamiento
máximo (max), figura 2.5 y se obtiene el cortante (Vmax) correspondiente al
mãximo desplazamento figura 2.6. Blandon y Priestley (2005) [7]. La ngidez efectiva la determinamos de la siguiente ecuaciOn:
ketj = (2.4)
Lmax
PASO 4: Periodo efectivo
Basados en Ia rigidez del etemento, et periodo efectivo es catculado para una representaciOn de la estructura en un Sistema de un Grado de Libertad (SDOF), Blandon y Priestley (2005) [7]. El penodo efectivo viene dado por:
T =211*
1'
'if \jg*K
Donde Wes la masa sismca efectiva (normalmente se toma la masa total de la estructura), para nuestro caso tomamos la carga apticada en la parte superior del elemento, g es la aceleraciOn de la gravedad y keff es Ia rigidez efectiva del
elemento, obtenida en el PASO 3.
PASO 5: Ductilidad
La ductilidad es la capacidad del elemento para deformarse más allã del timite plastico, y bajo cargas repetitivas Blandon y Priestley (2005) [7].
La ductilidad se la obtiene con la siguiente ecuaciOn:
P=— Ay
(2.5)
(2.6)
Ml god I7odiiAeA,,,ok. CAPILQ II Est udlo de los rnétodos tie linear, zuc,on, usadac en los métodos tie thseho s,s,no resistenle de estrueturas
PASO 6: Obtención del amortiguamiento equivalente
Del anãhsis no lineal de historia en el tiempo (ITHA), utilizamos el desplazamiento inelástico (Al) y el perlodo efectivo (Tern, para una estructura bajo la acciôn de un
s ismo.
El amortiguamiento equivalente es obtenido de un anáUsis elástico de historia en el tiempo, usando un proceso lOgico iterativo, aplicando el mismo registro de aceleraciôn y el mismo factor del análisis (ITHA), del cual si el desplazamiento inelâstico (Ai) es menor al desplazamiento elástico (Ae) el amortiguamiento ()
aumenta. En cambio si el desplazamiento inelàstico (Ai) es mayor al
desplazamiento elástico (Ae) el amortiguamiento () disminuye. El
amortiguamiento equivalente () se lo obtiene cuàndo el desplazamiento elástico (Ae) es igual al desplazamiento inelástico (Ai). Priestley, M.J.N., Calvi, G.M.,
Kowalsky, M.J. (2007) [9].
[image:21.574.241.330.395.525.2]El esquema correspondiente al proceso se to muestra a continuación:
FIGURA 2.8 anàlisls elás&o de histoila en el tiempo
2.4.2 Obtenciôn de la cuiva de amortiguamiento
La curva de amortiguamiento obtenida en el análisis de Dwairi (2004) [2], da como resultado que el amortiguamiento segün La aproximaciôn de Jacobsen es mayor at análisis utilizando et modelo histerético de Takeda y con 100 registros de aceleraciOn.
iA Uig.d HadmirMorewA rmjm. CAPfIVLO 11 Eth4io de Im ,,.ek,d,., & Iizith, wadw ,, Im ,,,itod, d ilo ,,w rm&u7me &
35% I I
co 30%
-CL
cr
NO
-20%
[image:22.574.164.433.77.260.2] [image:22.574.103.494.376.676.2]Displacement Ductility (M)
FIGURA 2.9 Obtendón de Ia curva segOn Jacobsen y el (MIA)
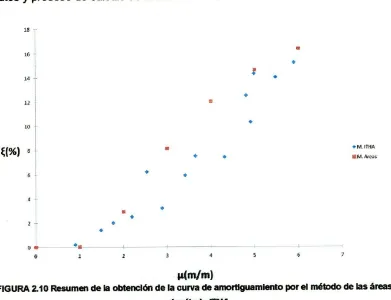
La gráfica que se muestran a continuación corresponde al resumen de la
aplicacion de los dos métodos usados para este proyecto. El ejerciclo con sus
datos y proceso de cálculo se detallan en el CAPITULO III.
18 16
4
14 *
12 10
U *M. 11118
OK Aro
6 4
+ S
*
OS •S - -
--0 1 2 3 4 6 6 7
W m/m)
FIGURA 2.10 Resumen de la obtencldn de la curva de amortiguamlento por el nietodo de las areas y
el método flUA
'..Mige1 7ndin rMo,ene A rrni,. CA PITULO II
Estudlo de log mitodos de lineoriaacjon, —dos en los métodos tie diseho sis,no re gistenle de estruct was
2.4.3 Resumen de Ia cuava de amortiguamiento
Al comparar la figura 2.9 y la figura 2.10 vemos que tienen una tendencia similar. Los puntos correspond ientes at Método ITHA están por debajo de la aproximaciOn de Jacobsen
La ductidad está dada de un rango de 1 a 6 para ambos métodos
La figura 2.10 correspondiente al ejercicio, muestra que el método de areas representa una curva uniforme.
La aproximación de Jacobsen es un método senciHo que para aigunos casos se to puede tomar como váhdo en vez de otros métodos más complejos.
Es importante indicar que los datos correspondientes a la figura 2.10 corresponden al amortiguamiento equivalente obtenido solo para un sismo, si el análisis se repite con otro sismo el amortiguamiento equivalente cambiaria.
CAPITULO
III
Mig d db,tjrMo,,,o ArmJo CAP! TULO Ii!
&tdo dt Mt vniodos de Iu,tnxió,,, ,dm t,, Mt ,,,éiod, do di,ti, i.,,o riUe,,tt d. esruclurm
DESARROLLO DEL ANAUSIS DE UNA PILA
Este proyecto está disponible a través de internet en la pagina
www.utpl.edu.ec/vlee, el pcoceso se 10 detalla a continuaciOn.
PASO 1: Registrar el usuano y la contraseña, En caso de no ser usuarlo, es
necesano crear una nueva cuenta.
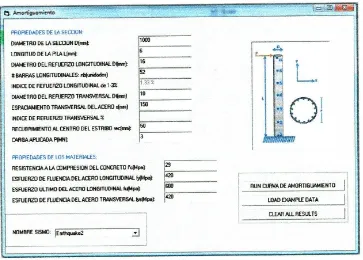
PASO 2: Se ingresa en la opción curva de amortiguamientO, el cual presenta el
siguiente fonnulano de entrada:
b
-FCPi[1AOEE LAFECCIGN
DI.AMETAO DL LA SW4 D(n
L[JNIifltJD DE LA PILAE1 6 DW.CTfIO DEL AEr1nZO LONGtTUDINL Dhtr
6 BAcAS WNGITUD6LALES: ,t(,ñdede*) 52 NcE DE REFUERZU LONGITUDINAL d
1-Dt6J4ETRO DEL REFUEFZD TRANSVERSAL D4—)
ESPA3#E)4TO TRANSVERSAL DELALEAD 4,,J INDWE DE NEFUERZU TRA NSV ERSA L PIECIJBRThENTD AL CENTRO DEL ESTRD ,er4.,. C6GAAFLDLA PTh*IE
Fi0Ff1FS F 1. 1TFFI F
flESLTENQAALALHPflESIOH DLLccnETor6lp. 29 ESEUERZO DE FUJE6IA DELCERD LONGITUDINAL M6lp ESFUERZD ULTIMO DEL ACERO LONGITUDINAL h*1p ESRJEAZD DL F1.UEIA DELACERO TRANSVERSAL Hp4
NOHESISMO: 2 .1
L.
H01
AUNCLIRVADEAIAORTIGLW41ENTO
LWDOMPLEDATAj
[image:25.574.112.475.250.510.2]CLEAR ALL RESULTS
FIgura 3.1 Pwpledades de la pie a desarroier
PASO 3: Se ingresa los datos correspondientes al entomo
En el botón "Load Example Data" se colocan todos los datos mostrados en la
figura 3.1
En el botôn "Clear All Results" se limpian todos los casilleros de la figura 3.1
En el boton "Run Curva de amortiguamiento' se desarrolla todo el procedimiento
de cálcufo, detallado en el paso 4:
PASO 4: DescnpciOn del proceso de cálculo:
Miguel VThth,,,jr Mo,eno .4s CAPITULO III Estutho de b.c ,netodos de linearizo.ciôfl, usa4os en los ,ndtodos de thseño sjno ,-es,stente de estructuros
Propiedades de la sección:
Ap = x D 2 =
= 0.785
4
4
7rxDI 2IlxO.0162
A hi
0.0002011
4
4
nb xD/ 252 xO.0162
cuani =
x 100 =
-____ x 100 = 1.33%
___
D2
rec = coy -
0.05 - 0.016 = 0.042
= 0.5 x
fyx cuant = 0.5 x 420 x 0.0133 = 2.793
Concreto confinado:
fcc=[_l.254+2.254xII1+7.94x_2k
) fc
fc 1fC
(3.1)
(3.2)
(3.3)
(3.4)
(3.5)
(3.6)
[cc
[]
= -1.254 + 2.254 x
f1 +
7.94 x
2,793
- 2 x 2.793 x 29 = 44.894
29
29
(3.7)
Yloc
-cov+ Dt = -0.05 + 0.01 = 0.46
2
2
1+5x---
1
000748
fc
29
ccc
= 0.002 x1+5x
- 1))=0.002x [
(44.894
fpcu
= 0.8 x fcc = 0.8 x 44.894 = 35.915
(3.8)
(3.9)
(1.4xcuantxfjvxesu)
(1.4x0.0133x420x0.1)..002144 (3.10)
Ecu = 0.004 +
--— = 0.004+
fc
44.894
Concreto no confinado:
Defc=0.002
fpu=0
Eu = 0.006
M,geI I7e,dfrMoseno nyo CAPITtILO III EstSio de Los ,nitodos de linearizac,On, ucados en Los mLtodos de diseho glanD reslstente de estructuras
Material elàstico del concreto:
Ec=4700x/fr =4700x729
=
25310.275
Acero:
es =
200000
ev==
420 =0.0021
Es
200000
(3.11)
(3.12)
fst — fj.'
600-420
=0.00919
(3.13)
(0.1—ey)xEs
(0.1_-0.0021)x200000
Parâmetros OPENSEES
bcent = cov+ Dl + Dt = 0.05
+ 0.016 + 0.010
=
0.076
(3.14)
r
= D- = 1- = 0.522
cr1
=
0.925
cr2=
0.15
al
=
0.04
a2=1
a3
=
0.04
a4=
1
Dr =8Dcc = 16
Drc =
2
np =5
dul
=
—0.001
du2 =
0.001
esh = 0.008
eco =
0.002
esin = 0.1
espall =
0.0064
ecser =
0,004
FactITHA=
0.04
(3.15)
MigeI r7eed Mo,cno A co,,dv cA PITULO III Lstudio dc/os inetodos tie lineanzación, usados en Los mdtodos tie d,-&-o rcS,srente de estrucfls,ac
eq/actor=gxtacITHA xi=9.8lxO.O4X I.2.3 ... 1
Donde, I representa el nümero de iriteracciOn
rc = r.cov = 0.5-0.05 =.045
Rb = r - bcent = 0.5— 0.076 = 0.424
Re = Rb = 0.424
X1 = = = 0.857
n-i
8—iLongitud de empotramiento:
Lsp=0.O22xfj.'xD/=0.022x420x0.016=O.i478
k = 0.2xi —1 ^ 0.08 = 0.2x(-1 = 0.08
) 420 )
Lp = k x L + Lsp ^! 2 x Lsp = 0.08 x 6 + 0.1478 = 0.6278
(3.16)
(3.17)
(3.18)
(3.19)
(3.20)
(3.21)
(3.22)
(3.23)
Una vez obtenidos todos los parametros necesarios, procedemos a reatizar cada
anãlisis correspondiente en el programa OPENSEES
Nota:
La creaciOn de los archivos *tcl que corresponden a cada análisis se especifican en la sección de anexosANALISIS ESTATICO:
[image:28.574.89.515.602.675.2]Con la creacOn del archivo Estatico.tcl y por medio del proceso lOgico en el software VISUAL BASIC obtenemos los siguientes parametros:
TABLA 3.2 Valores obtenidos del archivo Estãtico.tcl
(V) (Ec) (Es) (M) (4)) (A)
Cortante DeformaciOn Deformaciôn Momento Curvatura Desplazamiento
unitario del concreto del acero
'Migd irMo A Jo CAPITULO III
& h ,,etod d .,, l ,etoda & di, ,,,,o ,thUnt. d
De los resultados de Ia tabla 3.2 se interpola el momento con una deformación en
el acero
(Cs)
a 0.002 y, con una deformaciOn en el concreto
(Cc)
a 0.004.
Interpolamos la curvatura ($) con una deformación en el acero (Cs) a 0.002. Por
medlo de la ecuación 2.1 encontramos la curvatura de fluencia (ky).
Pare encontrar el desplazamiento de fluencia
(Ay)
interpolamoS la curvature de
fluencia ($y) obtenida. Los valores son mostrados a continuaciOfl:
M&=2389.68
Me. =
1855.50
=
0.00387
= 0.00498
Ay =
0.0328
Obteniéndose finalmente una curvatura de fluencia: iy=0.0328
ANAUSIS CICLICO:
Con la creación del archivo Cychc.tci y por medio del proceso lógico en el
software VISUAL BASIC obtenemos los siguientes parámetros cortante (V) y
desplazamiento (A), de los cuales se toma el area de la curva, el area del
rectangulo, pare posteriormente obtener el amortiguamiento:
TABLA 3.3 del
VI-Al
I
V2-2
I
V5-A5
I
V6-i6
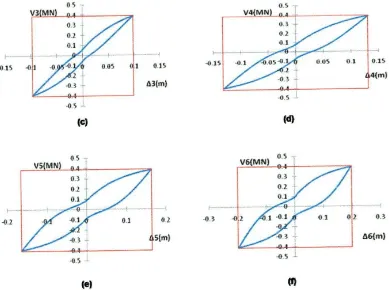
Cuya representación grafica la presentamos a continuaciOn:
0*
V1(MN)
-004 -001j 0 001 004
-02 ,A1(m)
04
(a)
Os
V2(MN)
0.3 01 0 0
0.05 01
A2(m)
(b)
ii
/mll..madmrMomw
CAPITLWHI R.u.dk, d J k d ., k ,,,ewd, de di,.A o ,.,w ,-e3Unt. f r sen
-or, ol 3(m) os (C) 0 ¶ -0.2 (1 S V4(MN) 04 0 0^2; S
(d)
0.3 02•0.3 01 012 03
a6(m)
-03
[image:30.574.98.487.76.366.2](e)
(f)
FIGURA 3.1 Representaclófl graflca del análIsIs Cyclic tcl
Finalmente
et amortiguamiento lo calculamoscon
la siguiente ecuaciOn 2.3.Expresado en porcentaje
Resumen: No 1 2 3 4 5 6 Ciclico
la curva m
3.17E-6 0.0047 0.0195 0.0382 0.0586 0.0802
3.4 Resumen
de I Dud
0.8
0.6
0.4
01 a(m/s2)
0
-0.2
-0.4
-0.6
45
A(m) 0.25 0.20
0.15
0.10
0.05
0.00
-0.05
-0.10
-0.15
-020
5
'JMigd CAPITULO IN
E4io de Im métod, dr Th,ewizó,,. madm m 1w ,,itoda, de dieIk, ,,w ,e,,ie de
ANALISIS NO LINEAL DE HISTORIA EN EL TIEMPO (ITHA):
Con la creación del archivo ITHA.tcl y por medto del proceso logico an el software
VISUAL BASIC obtenemos Los siguientes psrametros:
Datos del Sismo:
Nombre: Equake2ixt
duraciOn :40
lolerancia :0.01 Paso: 0.01
t(s)
HGUKA 3.2 RegIstro aitfl$caal compatitle con un eepectlo de .Jseflo
F1GURA 3.3 EemØo de Ia nctft del deeØazamlento mâxno alcaato eI regtsliO de acderación
de la figura 3.2
V(MN) 0.50 -. 0.40 0.30 0.20 0.10 0.00 -0.10 -0.20 -030 -0.40 -050 t.LLS 5
V lodimfrMo,.'s, A ,syo CAPITULO III
[image:32.574.135.425.68.222.2]E,t*o de Jo, ,,W ,, de l,o,izo,iá,, w,dos m Jo, méwda, de dj,.So d aVuclurm
FIGURA 3.4 EJeniØo de la oIenciOn del cdail en Twcldn del deeØazanleflto mSidmo, apicando
el registro de aceleraclOn de la Ilgura 3.2
0.50 V(MN) 0.40 0.30 0.20 ---.-+---
---0.2 -0.15 0.05 0_I 0.25 0.2
--- -0.40
.0.50
HGURA 35 Eimpb de Ia repr sedac*6fl gr*l$ca del corbmft y .1 desplazanle*O
[image:32.574.165.403.288.430.2]One. ESSaSS
TABLA 3.5 Resumen dcl anâliels fllIA
N Factor Maxdisp Maxtime Vmax Keff Teff Ductilidad Arnortig. (rn) (s) (MN) L (MN/rn) (s) (rn/rn)
1 0.3924 0.029 33.85 0.262 8897.71 1.16 0.89 0.20
2 0.7848 0.048 32.2 0.352 7222.47 1.29 1.48 1.40
3 1.1772 0.057 31.98 0.383 6628.74 1.34 1.76 2.00
4 1.5696 0.071 32.08 0.408 5672.80 1.45 2.19 2.50
5 1.962 0.094 17.01 0.393 4155.72 1.70 2.88 3.20
6 2.3544 0.083 32.14 0.406 4885.87 1.57 2.53 6.20
7 2.7468 0.112 10.73 0.419 3745.36 1.79 141 5.90
8 3.1392 0.119 17.98 0.409 3419.70 1.87 3.64 7.50
9 3.5316 0.141 6.03 0.419 2960.00 2.01 4.31 7.40
10 3.924 0.161 6.11 0.418 2596.17 2.156 4.91 10.30
11 4.3164 0.157 6.24 0.412 2616.62 2.14 4.80 12.50
12 4.7088 0.16 10.94 0.411 2510.25 2.19 4.98 14.30
13 5.1012 0.179 10.94 0.414 2304.66 2.28 5.47 14.00
14 5.4936 0.193 -10.95 0.414 2141.40 2.37 - 5.90 15.20
MigI P7admrMorew A ,a.jos CAF'IIVLO III hdo d Jo, m Jk , d I zooá,,, u,,do, , Jo, ,,,etodm d. th,ño ,,.a, raLmente d
OBTEPICION DE LAS CURVAS DE AMORTIGUAM1ENTO POR EL MET000
DE LAS AREAS Y EL METODO ITHA:
18
a
16
I
14 12 10
S U
• M, IOtA
6-4
U
00-0 1 2 3 4 5 6 1
[image:33.574.108.494.153.423.2]4m/m)
FIG URA 3.6 Obtenclón de la curve de amodiguamlentO: Amoftiguamiento vs Duclilidad de los valores
ieIdos on is table 3.4 (Mtodo de Areas) y los valores obtenldOs on Ia table 3.5 (Mêdo IThA)
CAPITULO
Iv
CONCLUSIONES
1JMig,el Vlothn,ie Moe,,o Arn,ijos C.4PfrULO IV Estudlo de los rnetodos de lineorizacide, cicadas en los metados de deeha sf5 ma resistente de estnicturas
ANALISIS DE RESULTADOS
En el anàhsis pushover Estático encontramos algunas variables como la deformaciôn en el acero (Es), deformaciOn en el concreto (Ec), Cortante (V), Momento (M), Curvatura (), Desplazamiento (A). Los parametros descritos anteriormente nos sirven para obtener la representaciOn grafica entre el momerito y la curvatura. El desplazamiento y la deformaciOn tanto del concreto como del acero. Parámetros establecidos por medio del cortante unitario
La flexibilidad del programa OPENSEES nos permite encontrar con mucha facilidad la representaciOn grafica de las variables, como se habla dicho anteriormente. Para la obtenciôn de resultados especificos simplemente se hace una interpolaciOn con las columnas dadas. La razón de este proceso es Ia de encontrar el desplazamiento de fluencia, una vez encontrada la curvatura de fluencia.
En el grupo de figuras 3.1 observamos claramente vanos parámetros muy importantes como la disipaciôn de energia(area de la curva), que es un indicador fundamental para conocer la respuesta en la estructura. Por medio del análisis tenemos el máximo desplazamiento que tiene la estructura en cada ciclo, la cual es directamente proportional con la ductilidad. El desplazamiento de fluencia, que es también un indicador de daño, la ngidez efectiva que graficamente representa la pendiente entre el ongen y el màximo desplazamiento, para finalmente encontrar con estas variables el amortiguamiento histerético.
Para el caso del análisis no lineal de historia en el tiempo, se pone a la estructura a experimentar un registro de aceleraciones ya ocumdo . En el analisis es vàhdo tamblén la generación artificial de los registros de aceleraciOn por medio de programas como se observa en (a figura 2.4. Los resultados varlan deacuerdo al registro de aceleraciOn usado.
MJMigsel V/od!mfr Mo,enoA,mijos CAPITULO IV Estudio de los mEtodos On llneorizoc,65, usados en los mEtodos de d,seho sisrr,o ens (denSe de estructuros
Al observar la figura 2.5 vemos que la respuesta de la estructura es aceptable, pues et desplazamiento máximo sufrido por Ia misma es de 0.20 cm, debido at método nos interesa conocer el máximo desplazamiento en vez de la maxima fuerza figura 2.6.En la figura 2.7 observamos los ciclos que cumple la estructura en todo el análisis, el desplazamiento por unidad de caga
En la figura 2.9 tenemos la representaciOn grafica de los dos métodos, expuestos en puntos de dispersiOn, en la cual se observa una proximidad entre ellos formando una curva.
CONCLUSIONES
El análisis de Jacobsen es una aproxmaciOn grafica sencilla. El ITHA comprende métodos de análisis muy complejos, pero de gran precisiOn. Al comparar ambos métodos como se observa en la figura 3.6 correspondiente al ejemplo se observa que la aproximaciOn de Jacobsen es muy cercana al método ITHA para el sismo
de estudio.
La relactOn de curvas de amortiguamiento analizado por Dwairi (2004) [2], como se observa en (a figura 2.9, obtiene que: El amortiguamiento segUn la aproximaciOn de Jacobsen es mayor at análisis ITHA. En el ejemplo presentado en este proyecto, se obtiene resultados similares.
El uso de (a herramienta computacional OPENSEES es muy ON y práctico. El software presenta varias ventajas como el análisis no lineal de estructuras. El uso de varios tipos de materiales es fundamental, especialmente acero y concreto, y permite dividir a la secciOn en fibras segUn la necesidad de cada usuano.
Se ha imptementado un programa que permite observar y expenmentar (a obtenciôn del amortiguamiento para ambos métodos detallada en el CAPITULO Ill
IMf,/ Vladimir Moreno Armijos CAPITULO IV Estudfo de be rnetodos de IinearizociOn, usodos en Ion mdtodos de dmeffo demo res,stente de estructuros
REFERENCIAS:
[1] Blandon, 2004 "Equivalent viscous damping equations for direct displacement based design"; Rose School.
[ 2 ] Dwain H.M, 2004. "Equivalent damping in support of direct displacement-based design with applications for multi-span Bridges". Ph.D. Thesis; North Carolina State University, Raleigh, North Carolina.
[3] Shibata and Sozen, 1976. "Substitute Structure Method for Seismic Design". Journal of the Structural Division, ASCE, Vol 102, No ST1.
4 ] Priestley, M.J.N. and Kowalsky M. J., (2000), "Direct Displacement-Based Seismic Design of Concrete Buildings", New Zealand, December.
[ 5 ] Kowalsky MJ. Displacement-based design-a methodology for seismic design applied to RC bridge columns.
Masters Thesis, University of California at San Diego, La Jolla, California, 1994.
[6] Kowalsky, M.J., Priestley, M.J.N., and MacRae, G.A. [1995] "Displacement-based Design of R.C. Bridge Columns in Seismic Regions". Earthquake Engineering and Structural Dynamics. Vol. 24, pp. 1623-1643.
[ 7 ] Blandon, C. A., and Priestley, M. J. N., 2005 "Equivalent viscous damping equations for direct displacement-based design" Journal of Earthquake Engineering vol. 9, Special Issue 1.
iMigel Vladimir Moreno Armijos CAPITULO IV Estudio de los métodos de linearizac iOn, user/os en Ids mr/toSs de diseflo s,smo resisten te de estructuros
NOMENCLATURA DE SIMBOLOS:
D- Diámetro de la pita (mm)
DL- Diámetro del refuerzo longitudinal (mm) Dt.-Diãmetro del refuerzo transversal (mm) L.-Altura de la pita (m)
P.-Carga axial que soporta la pita (MN)
nb.-NUmero de barras longitudinales (unidades) s.-Espaciamiento del acero transversal (mm) rec.-Recubnmiento libre (mm)
f'c.-Esfuerzo de compresiOn del concreto (Mpa) fy.-Esfuerzo de fluencia del acero longitudinal (Mpa) fys.-Esfuerzo de fluencia del acero transversal (Mpa) fu.-Esfuerzo máximo del acero longitudinal (Mpa) Ap-Area de la pila (cm2)
AL-Area de la barra longitudinal (cm2) cuant.-Cuantia de acero longitudinal (%) V.-Carga Axial (MN)
Vmax.-Carga axial maxima (MN) A.-Desplazamiento (m)
Amax.-Desplazamiento máximo (m) M.-Momento (MN*m)
t.- Tiempo (seg.)
ec.-DeformaciOn del concreto es.-DeformaciOn del acero Keff. Rigidez efectiva
(kNim).
y.-Curvatura de fluencia
A.- Desptazamiento de fluencia (m).
Teff Penodo Efectivo (s).
t- Ductilidad del elemento
'Miguel Vladimir Moreno Armijos CAPITLILO IV Estudlo de los métodos de linearizocidn, —dos en los métodos do diseflo sismo resistente de estructuras
Ec.- MOdulo de elasticidad del concreto (MN/M2) Es.-MOduIo de elasticidad del acero (MN/ m)
fpc.- Esfuerzo de compresión del concreto a los 28 dias. epsc.- DeformaciOn del concreto para el esfuerzo rnáximo fpcu.- Esfuerzo de aptastamiento del concreto.
epsU.- Deformaciôn del concreto at esfuerzo de aplastamiento. dul.-Desplazamiento minimo
du2.-Desplazamiento máximo r.-Radio de la pita (mm)
FactITHA.-Factor para el análisis no lineal eqfactor.- Factor de iteraciOn ITHA
xi.-Longtud entre nudos
A 'figuel V iadimir Moreno A rmyoso. A NF.X OS
Estudlo de Im ,n9io4.,s de linearizacu, issados os los métios de disetosismo resisiente de e.w.turas
ANEXO I
Los datos presentados a continuaciOn corresponden a una pila que será sometida a los anáhsis pushover: esthtico, cidico, ITIIA correspondlentes a este proyecto
INPUT FILE: Datos.txt, UNIDADES (MN,m)
PROPLEDADES DEL MATERIAL:
Esfuerzo tie compresión del concreto: 29.000
Esfuerzo de fluencia del acero longitudinal: 420.000
Esfuerzo de fluencia del acero transversal: 420.000
Esfuerzo máximo del acero del acero longitudinal: 600.000
GEOMIETRJA BE LA ESTRUCFUIRA:
Diámetro de la sección: 1.000 Altura de la pila: 6.000 Diámetro de la barra longitudinal: 0.016 # de banns longitudinal: 52.000
Diámetro de la barra transversal: 0.010
Espacianiiento: 0.150
Recubrimiento fibre 0.050
CARGA AXIAL:
rrc:i
1.61
1
I I.
/11ANEW 2
ARCHIVO Estatico.tcl PARA REAUZAR EL ANALISIS PUSHOVER ESTATICO
MEDIANTE EL PROGRAM OPENSEES, POR MEDIO DEL CUAL ENCONTRAMOS
EL DESPLAZAMIENTO DE FLUENCIA.
wipe
model basic -ndm 2 -ndf 3 node 1 0 0
node 2 0 6
J Fix supports at base of column
# Tag DXDYRZ fix 1 1 1 1
mass 2 0.305810397553517 0 0
uniaxialMaterial ConcreteOl 1 44.8935443053261 7.48053251907798E03 -35.9148354442609 -2.14355937387446E-02
uniaxialMaterial ConcreteOl 2 -29 -0.002 0 -0.006 uniaxialMaterial Elastic 3 25310.2745935322
uniaxialMaterial Stee102 4 420 200000 9.19305413687436E--03 section Fiber 1
patch circ 1 16 8 0 0 0 0.424 0 360 patch circ 2 16 2 0 0 0.424 0.5 0 360
layer circ 4 52 2.01061929829747E-04 0 0 0.424 0 360
Section Aggregator 2 3 Vy -section 1 geomTransf Linear 1
element beamwitbuinges 1 1 2 2 0.29568 2 0.29568 25310.2745935322 0.785398163397448 4.90873852123405E-02 1
.JJMigiiei kiadimir Moreno A rm /oso. AW EX OS
Esludia de los ,nérodos do linearizacián, usados en los métodos do diseño sismo res istene do estruauros'
recorder Element -file elelseclstEc.txt -time -ele 1 section 1 fiber 0.46 0 stressStrain
recorder Element file elelseclstEs.txt time ele 1 section 1 fiber -0.46 0 stressStrain
recorder Element -file elelseclForce.txt -time -ele 1 section 1 force recorder Element -file elelsecldefor.txt -time -ele 1 section 1 deformation
pattern Plain 1 "Constant" load 2 0 -3 0
* Gravity-analysis parameters -- load-controlled static analysis set Tol 1.0e-8; # convergence tolerance for test
constraints Plain; # how it handles boundary conditions numberer Plain; # renumber dof's to minimize band-width
(optimization), if you want to
system BandGeneral; * how to store and solve the system of equations in the analysis
test NormDispincr $Tol 6; # determine if convergence has been achieved at the end of an iteration step
algorithm Newton; use Newton's solution algorithm: updates tanaent stiffness at every iteration
integrator LoadControl 0.1 analysis Static
analyze 10
maintain constant gravity loads and reset time to zero loadConst -time 0.0
puts "Model Built"
* STATIC PUSHOVER ANALYSIS
---we need to set up parameters that are particular to the model. set IDctrlNode 2; # node where displacement is read for displacement control
set IDctrlDOF 1; # degree of freedom of displacement read for displacement contro
set Dmax 0.4; # maximum displacement of p ushover, push to 10% drift. set Dincr 0.001; # displacement increment for pushover, you want this to be very small, but not too small to slow down the analysis # create load pattern for lateral pushover load
pattern Plain 2 Linear load 2 1 0 U
constraints Plain; numberer Plain System BandGeneral
Set Tol l.e-8; U Convergence Test: tolerance
#test NormDispincr $Tol 6 test Energ y lncr $Tol 6 set TestType Energylncr set maxNumlter 10
set algorithmType Newton algorithm Newton
integrator DisplacementControl $IDctrlNode $IDctrlDOF $Dincr anal y sis Static
anal y ze 1
perform Static Pushover Analysis
/Atrguel fladimir Aloreno A rmfovo. A NEWS
Es/ti diode los indtodos de lineartzacithn. usados on los inthtodos de disei'io sisrno resistente tie estructuras
set Nsteps [expr int($Dmax/$Dincr)]; # number of pushover analysis steps
set ok [analyze $Nsteps]; # this will return zero if no convergence problems were encountered
---in case of convergence problems if {$ok OJ I
U change some analysis parameters to achieve conv ergence
U performance is slower inside this Loop set ok 0:
set controlDisp 0.0; U start from zero
set DO O.O U start from zero
set Dstep [expr ($controlDisp)/($Dmax)] while ($Dstep < 1.0 && $ok == 01
set controlDisp [nodeDisp 2 1
set Dstep [expr ($controlDisp/$Dinax)i set Ok [analyze 1
if {$ok 0}
puts "Trying Newton with Initial Tangent .." test NormDispincr $Tol $W 0
algorithm Newton - initial set ok [analyze 1
test $TestType $Tol $raaxNumlter 0 algorithm $algorithmType
if ($ok ! 0}
puts "Trying Broyden .." algorithm Broyden 8 set Ok [analyze 1
algorithm $algorithmType if ($ok ! 0)
puts "Trying NewtonWithLineSearch . algorithm NewtonLineSearch .8 set Ok [analyze 1
algorithm $algorithmType # end i-f ok !0
ANEXO3
ARCHIVO CycIic.tcl PARA REALIZAR EL ANALISIS PUSHOVER C'CLICO
MEDIANTE EL PROGRAMA OPENSEES
wipe
model BasicBuilder -ndm 2 -ndf 3 node 1 0 0
node 2 0.857142857142857 0 node 3 1.71428571428571 0 node 4 2.57142857142857 0 node 5 3.42857142857143 0 node 6 4.28571428571429 0 node 7 5.14285714285714 0 node 8 6 0
c}Viguel '7adimir Moreno Armiloso. A WEVOS
Estud:o de los rnátodos c/c linear/rat ion. usados en los mOtodos de c/is eflo sismo resistenfe do estruciuras
uniaxialMaterial ConcreteOl 1 44.8935443053261 7.48053251907798E03 -35. 9148354442609 -2.14355937387446E-02
uniaxialMaterial ConcreteOl 2 -29 -0.002 0 -0.006 uniaxialMaterial Elastic 3 25310.2745935322
uniaxialMaterial Steel02 4 420 200000 9.19305413687436E-03 section Fiber 1
patch circ 1 16 8 0 0 0 0.424 0 360 patch circ 2 16 2 0 0 0.424 0.5 0 360
layer circ 4 52 2.01061929829747E-04 0 0 0.424 0 360
section Aggregator 2 3 Vy -section 1 geoiriTransf Linear 1
element dispBeamColumn 1 1 2 5 2 1 element dispBeamColumn 2 2 3 5 2 1 element dispBeamColumn 3 3 4 5 2 1 element dispBeamColumn 4 4 5 5 2 1 element dispBeamColumn 5 5 6 5 2 1 element dispBeamColuitifl 6 6 7 5 2 1 element dispBeamColumn 7 7 8 5 2 1
recorder Node -file CyclicAnalize6.txt -time -node 8 -dot 2 disp recorder plot CyclicAnalize6.txt Node8 Ydisp 0 0 280 280 -columns 2 1 pattern Plain 1 "Constant"
load 8 -3 0 0
set dul 0.001 set du2 -0.001
# Define analysis parameters integrator LoadControl 0 system SparseGeneral -piv test NormDispincr 1.0e-4 2000 nuinberer Plain
constraints Plain algorithm KrylovNewton analysis Static
# Do one analysis for constant axial load analyze 1
# Define reference force pattern Plain 2 "Linear" load 8 0.0 1.0 0.0
#Perform the analysis
integrator DisplacementControl 8 2 $dul analyze 312
integrator DisplacementControl 8 2 $du2 analyze 624
integrator DisplacementControl 8 2 $dul analyze 624
integrator DisplacementControl 8 2 $du2 analyze 624
integrator DisplacementControl 8 2 $dul analyze 624
t i1tguel i7adimir Moreno Ar7rnioso. ANEVOS
Estudio do los niáfodos do lineari:ación, usados en los ,nétodos do d/seno sismo resstente do ostruturss.s
integrator DisplacementCOntrOl 8 2 $du2 analyze 624
integrator DisplacementContrOl 8 2 $dul analyze 624
ANEXO4
ARCHIVO ITHA.tcl PARA REALIZAR EL ANALISIS NO LINEAL DE HISTORIA EN EL TIEMPO (ITHA) MEDIANTE EL PROGRAM OPENSEES
wipe
model BasicBuilder -ndm 2 -ndf 3 node 1 0 0.00
node 2 0 0.86 node 3 0 1.71 node 4 0 2.57 node 5 0 3.43 node 6 0 4.29 node 7 0 5.14 node 8 0 6.00 fix 1 1 1 1 * nodal masses
mass 8 0.305810397553517 le-9 0
uniaxialMaterial ConcreteOl 1 44.8935443053261 7.48053251907798E03 -35.9148354442609 -2.14355937387446E--02
uniaxialMaterial ConcreteOl 2 -29 -0.002 0 -0.006 uniaxialMaterial Elastic 3 25310.2745935322
uniaxialMaterial Stee102 4 420 200000 9.19305413687436E03 section Fiber 1
patch circ 1 16 8 0 0 0 0.424 0 360 patch circ 2 16 2 0 0 0.424 0.5 0 360
layer circ 4 52 2.01061929829747E04 0 0 0.424 0 360 section Aggregator 2 3 Vy -section 1
geomTransf Linear 1
element dispBeamColumn 1 1 2 5 2 1 element dispBeamcolumn 2 2 3 5 2 1 element dispBeamColunin 3 3 4 5 2 1 element dispBeamColumn 4 4 5 5 2 1 element dispBeamColumn 5 5 6 5 2 1 element dispBeamColumn 6 6 7 5 2 1 element dispBeamColumn 7 7 8 5 2 1
recorder Node -file ITHA.txt -time -node 8 -dof 1 disp
recorder Element -file Force.txt -time -ele 7 globalForce pattern Plain 1 Linear
load 8 0 -3 0
* Define analysis parameters constraints Plain
numberer Plain system BandGeneral
test NormDispincr 1.0e-4 6
JAu,guel HadimirMorenoAmyoso. AAJEXOS
Estudlo de lox ,ndtodos de hnearizacidn, uxados en lox mdtodos de diseño ssmo resistente c/c estructura.c
algorithm Newton set NstepGravity 10
set DGravity [expr 1./$NstepGravity] integrator LoadControl $DGravity analysis Static
analyze $NstepGravity loadConst -time 0.0 puts "Model Built"
set equakex "Series -dt 0.01 -filePath Equake2.txt -factor 7.848" pattern UniformExcitation 2 1 -accel $equakex
set DtAnalysis 0.01 set TinaxAnalysis 40
system SparseGeneral -piv set Tol 0.001
constraints Transformation nuinberer Plain
set rnaxNumlter 10; set printFlag 0;
set Test p ype Energylncr; # Convergence-test type test $TestType $Tol $maxNuiniter $printFlag
set algorithmType ModifiedNewton algorithm $algorithmType;
set NewmarkGainma 0.5; # Newmark-integrator gamma parameter (also HHT) set NewmarkBeta 0.25; # Newmark-integrator beta parameter
integrator Newmark $NewmarkGamma $NewmarkBeta analysis Transient
puts $Tol
set Nsteps [expr int($TmaxAnalysis/$DtAnalysis)]; set ok [analyze $Nsteps $DtAnalysis]; # analysis; returns ok = 0 if analysis was successful set controlTime [getTime]
set Rdt [expr $DtAnalysis/101 set Rtol [expr $Tol/10]
while ($controlTime < $TmaxAnalysis}
if ($ok == 0}
test $TestType $Tol $maxNuxniter $printFlag algorithm $algorithmType
set ok [analyze 1 $DtAnalysis] set controlTime [getTime]
if ($ok ! 0)
puts "Reducing tol"
test $TestType $Rtol $maxNumlter $printFlag algorithm $algorithmType
set ok [analyze 1 $DtAnalysis] set controlTime [getTime]
if f$ok != 01
puts "Trying NewtonWithLineSearch algorithm NewtonLineSearch .8 set Ok [analyze 1 $DtAnalysis]
actually perform
if {$ok 0)
puts "Trying Newton with Initial Tangent Rdt. ."
))lifigueI '1adinnrMorenoA rnyoso. A NEX OS
Estudlo de los metodos de linearizacibn, usados en los métodos de diselo sumo resistente de estructuras
algorithm Newton
set Ok [analyze 1 $Rdt)
if {$ok ! 01
puts "Trying NewtonwithLineSearch Rdt.." algorithm NewtonLineSearCh .8
set Ok [analyze 1 $Rdt]
if {$o k != 01