Prototipo de Sistema para la Gestión de Ocupación de Parqueaderos en un Centro Comercial
98
0
0
Texto completo
(2)
(3) PROTOTIPO DE SISTEMA PARA LA GESTIÓN DE OCUPACIÓN DE PARQUEADEROS EN UN CENTRO COMERCIAL. CAMILO SNEIDER GARCIA VELANDIA JAIRO ALBERTO HUERTAS ACEVEDO. Monografía presentada como requisito parcial para optar al título de: Ingeniero en control. Director: ING. FRANK NIXON GIRALDO RAMOS. Línea de Investigación: Procesamiento de señales, Instrumentación electrónica. Universidad Distrital Francisco José de Caldas Facultad tecnológica, Ingeniería en control Bogotá, Colombia 2018.
(4)
(5) A nuestros padres y a todas las personas que con su apoyo y solidaridad abrieron las posibilidades de llegar a realizar este trabajo.
(6)
(7) Agradecimientos Agradecemos enormemente al director de este proyecto el Ingeniero Frank Nixon Giraldo Ramos, por la dedicación y apoyo que ha brindado a este trabajo, por el respeto a las sugerencias e ideas y por la dirección y el rigor que ha facilitado a las mismas. Gracias por la confianza ofrecida por el camino en esta facultad.. Un trabajo de investigación es siempre fruto de ideas, proyectos y esfuerzos previos, por esto agradecemos al Ingeniero Rafael Alberto Fino Sandoval por su amabilidad para facilitarnos su tiempo y sus ideas, por su orientación y atención a las consultas y por la revisión cuidadosa que ha realizado y sus valiosas sugerencias.. Gracias a nuestras familias, a nuestros padres, hermanos y amigos, que siempre nos han prestado un gran apoyo moral y humano, necesarios en los momentos difíciles de este trabajo y esta profesión. Sin su apoyo este trabajo nunca se habría escrito y, por eso, este trabajo es también el suyo..
(8)
(9) Resumen y Abstract. IX. Resumen En esta monografía se consigna la información, del proceso de investigación, desarrollo y resultados que se obtuvieron. El fin de la investigación fue crear una alternativa de solución a la problemática que consiste en que actualmente algunos de los parqueaderos que prestan el servicio, en centros comerciales, no asignan una plaza de parqueo específica a los automóviles, dejando que la ubicación de estos automóviles, quede libre a la decisión de cada usuario; otros parqueaderos no tienen en cuenta la totalidad de automóviles que se encuentran en su interior lo que puede determinar si este llego a su máxima capacidad, o no. Estas prácticas puede llegar a generar congestión vehicular dentro del parqueadero, poca comodidad para los usuarios, y no se genera una rotación adecuada en cuanto al uso de todas las plazas de parqueo con las que cuenta el parqueadero. Teniendo en cuenta la problemática expuesta anteriormente se propuso como una alternativa de solución, el diseño de un sistema prototipo que permite gestionar la ocupación de parqueaderos por medio de una red neuronal artificial (RNA), este sistema prototipo permite dar solución a los problemas descritos, y cumple con el objetivo de la gestión de las plazas de parqueo. El sistema informa por medio de una interfaz gráfica de usuario, las zonas de parqueo libres existentes, también asigna óptimamente la ubicación de parqueo y genera una dirección web en donde se muestra una guía de ruta que permite llegar al parqueadero libre asignado.. Palabras clave: Scikit Learn, red neuronal artificial, aprendizaje supervisado, procesamiento digital de imágenes, plano de ruta..
(10) X. PROTOTIPO DE SISTEMA PARA LA GESTIÓN DE OCUPACIÓN DE PARQUEADEROS EN UN CENTRO COMERCIAL. Abstract In this monograph the information is recorded, of the research process, development and results obtained. The purpose of the research is to create an alternative solution to the problem that is that at present some of the parks that provide the service, in shopping centers, do not There is a parking space specific to cars, leaving the location of these cars, be free to the decision of each user; Other parking lots do not take into account the totality of the cars that are inside, which can determine if this reaches its maximum capacity, or not. These practices can generate traffic congestion within the parking lot, little comfort for users, and no adequate rotation is generated in terms of the use of all parking spaces with parking accounts. Taking into account the problems described above, a prototype system was proposed as a solution alternative, which allows managing the occupation of parking spaces by means of an artificial neural network (RNA). This prototype system allows solving the problems described, and meets the objective of the management of parking spaces. The system informs by means of a graphical user interface, the existing free parking areas, also assigned in an optimal way the parking location and generates a web address where a route guide is shown that allows to reach the assigned free parking.. Keywords: Scikit Learn, artificial neural network, supervised learning, digital image processing, route plan..
(11) Contenido. XI. Contenido Pág. Resumen ......................................................................................................................... IX Lista de figuras ............................................................................................................. XIII Lista de Símbolos y abreviaturas ............................................................................... XVI Introducción .................................................................................................................... 1 1. Delimitación del ejercicio de investigación ............................................................ 5 1.1 Problema ......................................................................................................... 5 1.2 Justificación ..................................................................................................... 5 1.3 Objetivos.......................................................................................................... 6 1.3.1 General ................................................................................................. 6 1.3.2 Específicos............................................................................................ 6. 2. Marco de referencia ................................................................................................. 9 2.1 Evaluación de un sistema de estacionamiento autónomo basado en una red neural BP ................................................................................................................... 9 2.2 Aplicación de arquitecturas modernas de redes neuronales profundas ......... 10. 3. Marco teórico .......................................................................................................... 13 3.1 Redes neuronales artificiales ......................................................................... 13 3.1.1 La neurona artificial ............................................................................. 13 3.1.2 El Perceptrón ...................................................................................... 14 3.1.3 Tipos de aprendizaje ........................................................................... 16 3.2 Procesamiento digital de imágenes ............................................................... 17 3.3 Sustracción de fondo ..................................................................................... 19 3.4 Scikit learn ..................................................................................................... 19 3.5 MLPClassifier ................................................................................................ 20 3.6 MLPRegressor ............................................................................................... 20 3.7 BernoulliRBM ................................................................................................. 21 3.8 Máquina de Boltzmann .................................................................................. 21 3.9 Raspberry pi .................................................................................................. 21. 4. Ejecución de proyecto ........................................................................................... 23 4.1 Metodología ................................................................................................... 25 4.2 Características del prototipo .......................................................................... 26 4.3 Metodología para tratamiento de imágenes ................................................... 28 4.4 Pruebas de imagen........................................................................................ 30 4.5 Descripción de la red neuronal ...................................................................... 40.
(12) XII. PROTOTIPO DE SISTEMA PARA LA GESTIÓN DE OCUPACIÓN DE PARQUEADEROS EN UN CENTRO COMERCIAL 4.5.1 Primera regla .......................................................................................46 4.5.2 Segunda regla .....................................................................................46 4.5.3 Tercera regla .......................................................................................47 4.5.4 Cuarta regla .........................................................................................48 4.6 Desarrollo del código ......................................................................................48 4.7 Funcionamiento de la red local .......................................................................57. 5. Resultados ..............................................................................................................63 5.1 Pruebas de usuario ........................................................................................63 5.2 Cumplimiento de las reglas ............................................................................66 5.3 Comparación de aprendizaje de redes neuronales.........................................71 5.3.1 Método MLPClassifier ..........................................................................71 5.3.2 Método MLPRegressor ........................................................................76. 6. Conclusiones y recomendaciones ........................................................................79 6.1 Conclusiones ..................................................................................................79 6.2 Recomendaciones..........................................................................................80. Bibliografía .....................................................................................................................81.
(13) Contenido. XIII. Lista de figuras Pág. Figura 2-1: La topología del modelo de red neuronal de BP. ................................... 10 Figura 2-2: Ejemplo de imagen procesada .............................................................. 11 Figura 2-3: Resultados experimentales.................................................................... 12 Figura 3-1: Esquema de neurona artificial ............................................................... 13 Figura 3-2: Perceptrón de dos capas. ............................................................................ 15 Figura 4-1: Diagrama de bloques general del sistema ................................................... 23 Figura 4-2: Dimensiones de la estructura en madera del prototipo ................................ 26 Figura 4-3: Dimensiones del parqueadero diseñado para el prototipo ........................... 27 Figura 4-4: Metodología usada para el tratamiento de imágenes .................................. 28 Figura 4-5: Diagrama de flujo tratamiento de imágenes ................................................ 29 Figura 4-6: Algoritmo para iniciar prueba de imagen ..................................................... 30 Figura 4-7: Algoritmo del ciclo while utilizado para captura de imágenes ...................... 31 Figura 4-8: Línea de código para realizar resta de imágenes ........................................ 31 Figura 4-9: Primera comparacion entra la imagen actual y el resultado de la resta ....... 32 Figura 4-10: Segunda comparacion entra la imagen actual y la imagen re reconocimiento ....................................................................................................................................... 32 Figura 4-11: Algoritmo de la máscara para identificar cambios en la imagen ................ 32 Figura 4-12: Algoritmo utilizando cv2.mpments (resm) .................................................. 33 Figura 4-13: Línea de código para identificación de contorno ........................................ 33 Figura 4-14: Definición de los vectores matapx y matapy. ............................................. 33 Figura 4-15: Vista grafica de la delimitación de los vectores matapx y matapy .............. 34 Figura 4-16: Esquina del rectángulo del cual se toman las coordenadas ...................... 34 Figura 4-17: Prueba de comparación y detección en sus diferentes capaz ................... 35 Figura 4-18: Algoritmo con GPI0.Input(5) para detectar acción en el pulsador .............. 35 Figura 4-19: Algoritmo con la función Draw_sal() .......................................................... 36 Figura 4-20: Asignación de parqueadero en conteo de número par. ............................. 37 Figura 4-21: Asignación de parqueadero en conteo de número par. ............................. 37 Figura 4-22: Asignación de parqueadero en conteo de número impar........................... 38 Figura 4-23: Creación de los círculos de entrada y de centro de plaza de parqueo ....... 38 Figura 4-24: Creación de las líneas de guía en la ruta para parquear ........................... 38 Figura 4-25: Creación del mapa para las diferentes páginas web.................................. 39 Figura 4-26: Condiciones programadas de la página web ............................................. 39 Figura 4-27: Ejemplo de funcionamiento de la página web. ........................................... 40 Figura 4-28: Estructura básica de la red neuronal ......................................................... 42.
(14) XIV. PROTOTIPO DE SISTEMA PARA LA GESTIÓN DE OCUPACIÓN DE PARQUEADEROS EN UN CENTRO COMERCIAL. Figura 4-29: Estructura de la red neuronal ..................................................................... 42 Figura 4-30: Diagrama de flujo proceso de aprendizaje ................................................. 43 Figura 4-31: Esquema básico de las plazas de parqueo ................................................ 44 Figura 4-32: Esquema de las plazas de parqueo numeradas......................................... 44 Figura 4-33: Matrices para el control de las plazas de parqueo ..................................... 45 Figura 4-34: Ejemplo de la primera regla, plaza de parqueo ocupada (rojo) y libre (verde) ....................................................................................................................................... 46 Figura 4-35: Ejemplo de la segunda regla, plaza de parqueo ocupada (rojo) y libre (verde) ............................................................................................................................ 47 Figura 4-36: Ejemplo de la tercera regla, plaza de parqueo ocupada (rojo) y libre (verde) ....................................................................................................................................... 47 Figura 4-37: Ejemplo de la cuarta regla, plaza de parqueo ocupada (rojo) y libre (verde) ....................................................................................................................................... 48 Figura 4-38: Algoritmo utilizando Def search_section2() ................................................ 49 Figura 4-39: Algoritmo utilizando Def Vacio () ................................................................ 50 Figura 4-40: Algoritmo utilizando Def Tiempo() .............................................................. 50 Figura 4-41: Algoritmo utilizando Topos()....................................................................... 51 Figura 4-42: Algoritmo utilizando Search_position() ....................................................... 52 Figura 4-43: Segmento de código regla dos ................................................................... 52 Figura 4-44: Segmento de código regla tres .................................................................. 53 Figura 4-45: Algoritmo utilizando Sear_section1() .......................................................... 53 Figura 4-46: Algoritmo utilizando Def learn() .................................................................. 54 Figura 4-47: Algoritmo utilizando Def Prediccion() ......................................................... 55 Figura 4-48: Algoritmo utilizando Def forlearn() .............................................................. 56 Figura 4-49: Algoritmo para la creación de códigos QR y la edición de la imagen en la página web ..................................................................................................................... 57 Figura 4-50: Publicación de codigo QR y alfanumérico .................................................. 57 Figura 4-51: Estructura de la red local utilizada.............................................................. 58 Figura 4-52: Configuración de la dirección IP del computador para crear red local ........ 59 Figura 4-53: Página de prueba index.html...................................................................... 60 Figura 4-54: Código de la página web utilizada .............................................................. 60 Figura 5-1: Código alfanumérico y QR mostrados en pantalla ....................................... 63 Figura 5-2: Referencia de autos en el parqueadero ....................................................... 64 Figura 5-3: Escaneo de código QR ................................................................................ 64 Figura 5-4: Lectura de la dirección de página ................................................................ 65 Figura 5-5: Dirección de página web en el navegador.................................................... 65 Figura 5-6: Visualización del plano de ruta en la página ................................................ 66 Figura 5-7: Imagen actual del parqueadero (regla 1)...................................................... 67 Figura 5-8: Asignación realizada (regla 1) ...................................................................... 67 Figura 5-9: Imagen actual del parqueadero (regla 2)...................................................... 68 Figura 5-10: Asignación realizada (regla 2) .................................................................... 68 Figura 5-11: Imagen actual del parqueadero (regla 3).................................................... 69 Figura 5-12: Asignación realizada (regla 3) .................................................................... 69.
(15) Contenido. XV. Figura 5-13: Imagen actual del parqueadero (regla 4) ................................................... 70 Figura 5-14: Asignación realizada (regla 4) ................................................................... 70 Figura 5-15: Conversión de vector binario, a numero decimal ....................................... 71 Figura 5-16: Porcentaje de aciertos vs porcentaje de error (100 capas) ........................ 72 Figura 5-17: Porcentaje de aciertos vs porcentaje de error (90 capas) .......................... 72 Figura 5-18: Porcentaje de aciertos vs porcentaje de error (80capas) ........................... 73 Figura 5-19: Porcentaje de aciertos vs porcentaje de error (70 capas) .......................... 73 Figura 5-20: Porcentaje de aciertos vs porcentaje de error (60 capas) .......................... 74 Figura 5-21: Porcentaje de aciertos vs porcentaje de error (50 capas) .......................... 74 Figura 5-22: Porcentaje de aciertos vs porcentaje de error (40 capas) .......................... 75 Figura 5-23: Porcentaje de aciertos vs porcentaje de error (30 capas) .......................... 75 Figura 5-24: Porcentaje de aciertos vs porcentaje de error (100 capas) ........................ 76 Figura 5-25: Porcentaje de aciertos vs porcentaje de error (100 capas), segunda prueba ....................................................................................................................................... 77.
(16) Contenido. XVI. Lista de Símbolos y abreviaturas Símbolos con letras latinas Símbolo A. Término Área. Unidad SI m2. Definición ∬. Unidad SI. Definición (wF,waf)(ABET). 1. Ecuación 3.6. Símbolos con letras griegas Símbolo. Término. α. Factor de superficie. η. mittlere. Subíndices Subíndice E. Término Experimental. Superíndices Superíndice Término T Exponente, potencia. Abreviaturas Abreviatura Término BP Back Propagation.
(17) Introducción En la actualidad existen diferentes soluciones electrónicas o de software, para el creciente negocio de los parqueaderos, estas alternativas de solución van desde aplicaciones para dispositivos celulares tales como Cellular Parking System, My park o NIDOO, entre otras, que sirven para la reserva de lugares de parqueo o cálculo de tarifas; las alternativas de solución llegan hasta parqueaderos automatizados tales como Parkeo, un parqueadero con una plataforma totalmente robotizada que presta el servicio en Bogotá, está diseñado con tecnología que ya ha sido implementada en muchos parqueaderos alrededor del mundo; las soluciones que son implementadas varían dependiendo de la zona y el tipo de clientes que se tienen, y lo máximo que estos pueden pagar por el servicio.. Por esto se parte de la idea de crear una alternativa de solución que sea económica y útil tanto para los dueños de parqueadero, como para los usuarios de los mismos, y por lo tanto esta alternativa genere interés y se pueda acoplar en los parqueaderos presentes en la ciudad que cumplan con requerimientos de luminosidad e infraestructura; se inicia por identificar los principales problemas o necesidades que se presume puedan tener tanto los usuarios, como los dueños de los parqueaderos, de los problemas identificados se seleccionan los que se creen más importantes o frecuentes para trabajar en la solución de estos.. Identificamos que la gestión de la mayoría de aspectos de un parqueadero en un centro comercial, son el eje fundamental para su buen funcionamiento, siendo uno de los aspectos más importantes, la gestión de ocupación de las plazas de parqueo; ya que cuando funciona correctamente, se ven beneficiados tanto el que ofrece el servicio como también al usuario final; los eventos que pueden generar que por el contrario, se vean afectados son: ya sea porque se genera congestión vehicular, atascamiento dentro del parqueadero, o porque a ciertas horas la demanda de plazas de parqueo es alta y es difícil para los usuarios encontrar espacios para estacionar rápidamente, y puede.
(18) 2. Introducción. suceder que tengan que dar vueltas antes de encontrar una plaza de parqueo; se pueden presentar uno, varios o todos los eventos anteriores.. Los usuarios eventualmente podrían querer parquear todos en el mismo lugar, ya sea porque quedan más cerca a la puerta o al supermercado, esto genera que cuando hacen sus compras y se disponen a guardarlas en el automóvil, no encuentran espacio para abrir las puertas correctamente y termina generando inconvenientes entre dueños de automóviles o congestión vehicular; con respecto al que ofrece el servicio de parqueadero, tiene como resultado que unas plazas tienen más desgaste en su superficie que otras, y le generan una necesidad de mantenimiento más frecuente, y por lo tanto más gasto de dinero.. También se llega al caso de que los que ofrecen el servicio de parqueadero se ven en la necesidad de contratar una persona que esté pendiente de todos los aspectos del parqueadero, hasta de verificar visualmente si quedan plazas de parqueo disponibles, porque no tienen una herramienta electrónica, que se vuelve necesaria para realizar un monitoreo constante y automático.. Algunas empresas se dedican a la automatización de parqueaderos, estas empresas tales como Signal Park, Park Help o circontrol tienen soluciones electrónicas, que contemplan la utilización de un sensor por plaza de parqueo, estas soluciones permiten sensar la totalidad de las plazas de parqueo, es decir que si un parqueadero cuenta con 100 plazas de parqueo necesitara la misma cantidad de sensores, además de todo el cableado que estos sensores necesitarán, resultan entonces sistemas con gran cantidad sensores; como solución a esto se propuso utilizar una cámara de video como reemplazo de sensores, ya que por medio del procesamiento de sus imágenes se obtendrá información que permite verificar múltiples plazas con una única cámara, lo que reduce la cantidad de sensores necesarios para realizar el monitoreo.. Como se quiere plantear una solución generalizada que pueda ser usada en diferentes parqueaderos, inicialmente el sistema fue montado en un prototipo a escala que permite realizar pruebas de funcionamiento, esto permite simular condiciones de luminosidad y de la forma en que están distribuidas las plazas de parqueo, estas condiciones podrían.
(19) Introducción. 3. encontrarse en los parqueaderos reales, por lo tanto el sistema debe ser adaptable, simplemente modificando sus parámetros.. Este prototipo también tiene la capacidad de simular como seria todo el proceso desde que un automóvil entra, y hasta que sale, es decir como es la interacción entre el sistema y el usuario, y verificar su correcto funcionamiento; para la solución además no se utiliza más que un minicomputador de bajo costo, una cámara de video, un pulsador, y una pantalla, esto hace que el sistema sea económico. El prototipo solo está pensado para parqueaderos cerrados, donde la luz no cambie considerablemente con el paso del tiempo.. Uno de los aspectos más importantes del sistema es la utilización de una red neuronal para la toma de decisiones con respecto a la gestión, ya que esta permite, programar diferentes parámetros para cada parqueadero según sea el caso y la necesidad del momento, con esto la gestión del parqueadero tiene la opción de ser flexible; en este caso se diseñó un plano de parqueadero y se establecieron los parámetros de la red más acordes a la estructura de distribución de las plazas de parqueo..
(20)
(21) 1 Delimitación del ejercicio de investigación 1.1 Problema Algunos parqueaderos que prestan el servicio, en cualquier tipo de centro comercial, no asignan una ubicación de parqueo específica a los automóviles, dejando que la ubicación de estos automóviles, quede libre a la decisión de cada usuario; otros parqueaderos no tienen en cuenta el número de automóviles que se encuentran en su interior lo que puede determinar si este llego a su máxima capacidad, o no. Estas prácticas puede llegar a generar congestión dentro del parqueadero, poca comodidad para los usuarios ya que los vehículos se ubican muy cerca unos de otros y no dejan espacio suficiente para la apertura de puertas y el ingreso de mercancía, tampoco se genera una rotación adecuada en cuanto al uso de todas las plazas de parqueo con las que cuenta el parqueadero.. 1.2 Justificación Con este sistema se espera beneficiar a usuarios directos es decir a todas las personas o empresas que tengan como actividad económica el prestar el servicio de parqueadero, así como también las personas que son usuarias de estos parqueaderos y en general se beneficiaran de manera indirecta toda la comunidad que tenga que ver de una u otra forma con el funcionamiento de estos parqueaderos. Logrando con la gestión de los parqueaderos una mejor experiencia y comodidad a la hora de usar el servicio, la organización también permitirá mejorar aspectos como el tiempo de entrada y de parqueo. La gestión automática de los parqueaderos generara un ahorro de tiempo y dinero. La gran mayoría de los sistemas para parqueaderos que se encuentran actualmente en el mercado tienen un alto costo, por lo que su compra e implementación desde el punto de vista del desarrollo tecnológico no es viable, además de que el proyecto se desarrolla con.
(22) 6. PROTOTIPO DE SISTEMA PARA LA GESTIÓN DE OCUPACIÓN DE PARQUEADEROS EN UN CENTRO COMERCIAL. equipos de bajo costo, se cambia la configuración de múltiples sensores a una de un único sensor y el programa es diseñado en software libre, las personas o empresas interesadas preferirán implementar un sistema que ofrezca una solución de bajo costo y que brinde seguridad. Este sistema tendrá como avance el uso de la tecnología de una Raspberry pi 2, ampliando el rango de posibilidades y permitiendo ahora la toma de datos del sistema por medio de una cámara de video, lo que facilita un monitoreo constate. Esto lo hace un sistema efectivo y de menor costo, superando así los aspectos más importantes de la mayoría de los sistemas actuales existentes. También, si se tiene en cuenta que actualmente existe una tendencia cada vez más fuerte al cambio por implementaciones en plataformas de software libre, se tiene una gran ventaja, y con la implementación de una red neuronal artificial, se espera que el sistema tenga una mejor capacidad en la toma de decisiones en cada momento en el que se requiera. Por tanto, se espera que este sistema tenga muchas implementaciones a corto y mediano plazo.. 1.3 Objetivos 1.3.1 General Diseñar un sistema prototipo para gestión de ocupación de parqueaderos por medio de una red neuronal artificial.. 1.3.2 Específicos . Detectar cuando un usuario oprima el pulsador de solicitud de parqueo y publicarle en pantalla un código alfanumérico, que representa la plaza de parqueo asignada.. . Generar y publicar en pantalla un código QR para cada usuario, este código contiene una dirección web, en la cual se visualiza un plano de vista superior del parqueadero, y una ruta desde la entrada hasta la plaza asignada.. . Identificar por medio de la cámara de video, si cada plaza de parqueo se encuentra disponible u ocupada..
(23) Capítulo 1. . 7. Asignar una plaza de parqueo a cada usuario, por medio de una red neuronal artificial (RNA) diseñada en Python utilizando la herramienta Sckit learn..
(24)
(25) 2 Marco de referencia 2.1 Evaluación de un sistema de estacionamiento autónomo basado en una red neural BP El sistema de aparcamiento autónomo es un sistema inteligente que puede aparcar un coche en una plaza de aparcamiento. Recientemente, más y más estudios prestan atención en este sistema. Sin embargo, la investigación sobre la evaluación del sistema de estacionamiento autónomo en estos estudios no es suficiente. Debido a que la mayoría de los métodos de evaluación del sistema de vehículos inteligentes se basan en el grado de realización de tareas, la evaluación del sistema de estacionamiento autónomo no puede mostrar su nivel real inteligente. (Du, Zhao, Gao, & Wang, 2017) Con el fin de garantizar la viabilidad y exactitud de la evaluación del sistema de estacionamiento autónomo, se propone un método de evaluación eficaz basado en la red neuronal de BP. El método de evaluación se establece sobre la base del sistema de evaluación del sistema de estacionamiento autónomo, utilizando el modelo de evaluación de la red neuronal de BP. Utilizando muestras recogidas del sistema de estacionamiento autónomo en vehículos inteligentes, el modelo es entrenado por el software MATLAB y el modelo de evaluación es probado por muestras. Se tuvo como resultado que los valores de simulación son muy cercanos a los esperados, lo que significa la viabilidad y exactitud del modelo de evaluación. (Du et al., 2017).
(26) 10. PROTOTIPO DE SISTEMA PARA LA GESTIÓN DE OCUPACIÓN DE PARQUEADEROS EN UN CENTRO COMERCIAL. Figura 2-1:. La topología del modelo de red neuronal de BP.. (Du et al., 2017) Donde d1 es la distancia más corta del vehículo desde la acera, N1 el número de conmutadores de avance / retroceso, N2 el número de paradas, N3 el número de dirección, D es la distancia total del proceso de estacionamiento, t el tiempo total del proceso de estacionamiento, d2 la distancia desde el centro del vehículo al centro del espacio de estacionamiento y Q el ángulo entre el eje longitudinal del vehículo y el espacio de estacionamiento, S simplemente es la salida de la red neuronal.. 2.2 Aplicación de arquitecturas modernas de redes neuronales profundas Al clasificar imágenes, es importante seleccionar un método para extraer características de una imagen que puede ser una tarea bastante difícil. Recientemente, el aprendizaje profundo de redes neuronales ha mostrado buenos resultados en la extracción de características automáticas para una clasificación posterior, por esto se evalúa la capacidad de utilizar una red neuronal de convolución moderna GoogLeNet para la extracción automática y la clasificación de imágenes adicionales. La tarea de clasificación se revisa en el contexto de un problema de determinación de lugares de estacionamiento vacantes. La red neuronal ha mostrado un resultado comparable con el resultado de la clasificación en las características seleccionadas manualmente, pero más sostenible para las transformaciones de imagen. (Mityakov, Varankin, & Tatarinov, 2017).
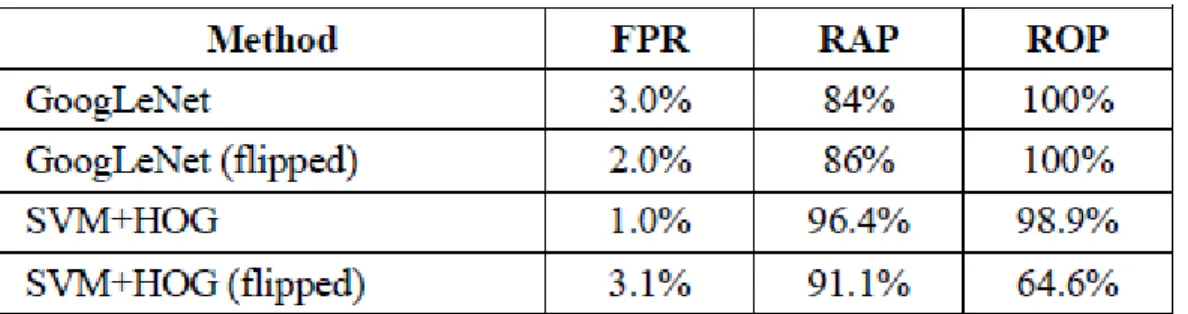
(27) Capítulo 1. 11. En la tarea de clasificación de imágenes, lleva mucho tiempo preparar el conjunto de datos para el entrenamiento. En este caso, este conjunto de datos es un conjunto de imágenes relacionadas con una de dos clases: "lugar vacante" o "lugar ocupado". Las imágenes se anotaron manualmente utilizando la herramienta LabelImg. En la figura se muestra una imagen procesada. Debido a que las imágenes en nuestra tarea son estáticas, se realizó una modificación significativa de la herramienta utilizada. Su modificación nos permitió no anotar cada imagen individualmente, sino cambiar solo los estados de los lugares anotados y, por lo tanto, ahorrar tiempo para la preparación del conjunto de datos de capacitación. Entonces la anotación de 2167 imágenes tomó aproximadamente 2 horas. Como resultado, se creó el conjunto de datos de capacitación que contiene 1726 imágenes con la clase "ocupada" y 441 imágenes con la clase "vacante". (Mityakov, Varankin, & Tatarinov, 2017) Figura 2-2:. Ejemplo de imagen procesada. (Mityakov et al., 2017).
(28) 12. PROTOTIPO DE SISTEMA PARA LA GESTIÓN DE OCUPACIÓN DE PARQUEADEROS EN UN CENTRO COMERCIAL. Figura 2-3:. Resultados experimentales. Utilizando la red neuronal GoogLeNet, se logra obtener una calidad de reconocimiento comparable con el método elegido manualmente. Las características de red neuronal seleccionadas automáticamente son resistentes a la transformación de la imagen de origen, a diferencia de las características de HOG se encontró. Debido a la rápida mejora de los marcos para el desarrollo y capacitación de redes neuronales en procesadores gráficos y la disponibilidad pública de los últimos desarrollos en esta área, el uso de redes neuronales se vuelve disponible para resolver problemas de diversa complejidad y presupuesto. Así que en este trabajo, la capacitación de la red neuronal en el conjunto de entrenamiento compuesto por 2167 imágenes tomó aproximadamente 12 minutos en una computadora con la tarjeta de video de la familia nvidia gtx 1070. (Mityakov, Varankin, & Tatarinov, 2017).
(29) 3 Marco teórico 3.1 Redes neuronales artificiales 3.1.1 La neurona artificial La neurona artificial es una unidad procesadora con cuatro elementos funcionales: Figura 3-1:. Esquema de neurona artificial. (Lara, n.d.) El elemento receptor, a donde llegan una o varias señales de entrada xi, que generalmente provienen de otras neuronas y que son atenuadas o amplificadas cada una de ellas con arreglo a un factor de peso wi que constituye la conectividad entre la neurona fuente de donde provienen y la neurona de destino en cuestión. (Lara, n.d.) El elemento sumador, que efectúa la suma algebraica ponderada de las señales de entrada, ponderándolas de acuerdo con su peso, aplicando la siguiente expresión:. (. ). (3.1).
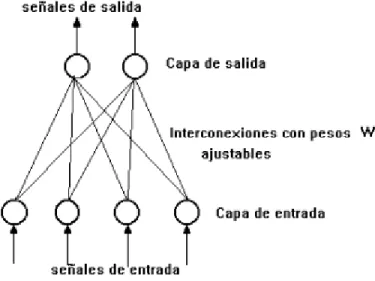
(30) 14. PROTOTIPO DE SISTEMA PARA LA GESTIÓN DE OCUPACIÓN DE PARQUEADEROS EN UN CENTRO COMERCIAL. El elemento de función activadora, que aplica una función no lineal de umbral (que frecuentemente es una función escalón o una curva logística) a la salida del sumador para decidir si la neurona se activa, disparando una salida o no. (Lara, n.d.) El elemento de salida que es el que produce la señal, de acuerdo con el elemento anterior, que constituye la salida de la neurona. Este modelo neuronal es el utilizado en casi todas las Redes Neuronales artificiales, variando únicamente el tipo de función activadora. A continuación se presentarán los modelos más simples de Redes Neuronales artificiales. (Lara, n.d.). 3.1.2 El Perceptrón Desarrollado por Rosenblatt (1958), consiste en una neurona procesadora, con sus elementos de entrada, sumador, activador y de salida. A la cual llegan señales de entrada xi, i = 1, 2,..., n cada una con una a través de una línea con conductividad o peso asociado wi. El elemento sumador efectúa entonces una suma ponderada de las entradas, en tanto que el activador emplea una función escalón de umbral: si la suma ponderada es mayor o igual a un valor de umbral U, da una salida y de tal manera que:. (3.2) (3.3) La red neuronal más simple construida con perceptrones tiene dos capas: una capa receptora de entrada, en la que la salida de cada neurona reproduce simplemente su entrada y una capa de salida formada por perceptrones como los descritos, totalmente conectados con la capa de entrada, a través de líneas de comunicación con conductividades o pesos ajustables. (Lara, n.d.) Así, cada neurona de entrada está conectada con cada neurona de salida a través de una línea de comunicación con una conductividad o peso ajustable. La ley de aprendizaje del perceptrón ajusta estos pesos, de manera que se obtenga con mayor probabilidad la salida deseable correspondiente a un cierto conjunto de entradas. (Lara, n.d.).
(31) Capítulo 1. 15. Figura 3-2: Perceptrón de dos capas.. (Lara, n.d.) El perceptrón es entrenado presentándole un conjunto de patrones de entrenamiento en forma repetida. Cada patrón de entrenamiento es una pareja formada por un vector de entrada x y su vector de salida y deseable. La dimensión del vector de entrada es igual al número de neuronas de la capa de entrada, en tanto que la dimensión del vector de salida es igual al número de neuronas de la capa de salida. (Lara, n.d.) Al presentarle el vector de entrada al perceptrón, sus neuronas de entrada lo asumen. Las salidas de la red se comparan con el vector de salida y la diferencia obtenida se utiliza para reajustar los valores de los pesos w de las interconexiones. Este reajuste se hace de modo que sea más probable que la red dé la respuesta apropiada la siguiente vez. El entrenamiento prosigue hasta que todas las respuestas de la red se aproximan en forma aceptable a las deseadas. (Lara, n.d.) Para el reajuste de los pesos, existen diferentes reglas propuestas posteriormente por diferentes autores, basadas en la Regla Delta de Widrow y Hoff (1960). En una de las más sencillas, el nuevo peso w1 es igual al peso anterior w0 más una cantidad proporcional a la diferencia entre la salida deseada t y la salida real y: (. ). (3.4). Donde h es una constante de proporcionalidad menor que la unidad que se llama razón de aprendizaje. (Lara, n.d.).
(32) 16. PROTOTIPO DE SISTEMA PARA LA GESTIÓN DE OCUPACIÓN DE PARQUEADEROS EN UN CENTRO COMERCIAL. Si el vector de entradas es de ceros y unos, hay una fórmula derivada en la que la razón de aprendizaje se multiplica por la entrada correspondiente x. De este modo, el peso se modifica solo cuando la entrada vale 1, es decir, cuando está activa. Así, la fórmula anterior queda en la forma: (. ). (3.5). De acuerdo con estas fórmulas, el nuevo peso es mayor que el anterior, si la salida deseada es mayor que la actual y menor en el caso contrario. (Lara, n.d.) Antes de comenzar el entrenamiento, los pesos se fijan aleatoriamente. Durante el entrenamiento, los patrones de entrenamiento se presentan a la red una y otra vez (a veces cientos y hasta miles de veces), hasta que los pesos ya no se modifican. En este caso se dice que la red ha convergido, en cuyo caso o ha aprendido con éxito o se declara incapaz de aprender todas las respuestas correctas. (Lara, n.d.) Las limitantes más grandes del perceptrón es que, aunque pueden construirse Redes Neuronales de varias capas con él, no permite más que una sola capa de pesos adaptativos. (Lara, n.d.). 3.1.3 Tipos de aprendizaje Se ha mencionado ya que una de las características fundamentales de las Redes Neuronales es su adaptabilidad y su susceptibilidad de aprendizaje, a través de la modificación de los pesos de las interconexiones entre las diferentes neuronas. (Lara, n.d.) Hay dos formas fundamentales de aprendizaje: Aprendizaje supervisado, que requiere la presencia de un tutor externo y una serie de patrones de aprendizaje. El tutor conoce el vector de respuesta correcto ante cada vector de entradas y, con la respuesta real de la red, genera un vector de error, que retroalimenta a ésta. La red, con base en el vector de error, actualiza los pesos de sus interconexiones de manera que el error tienda a desaparecer. Con un número suficiente de sesiones de entrenamiento, la red converge, produciendo las respuestas.
(33) Capítulo 1. 17. deseadas. Este tipo de aprendizaje es el aplicado tanto en el Perceptrón, como en la Adaline. Aprendizaje no supervisado, que utiliza datos de entrenamiento no etiquetados previamente y no necesita tutor externo. Los datos son presentados simplemente a la red, que de acuerdo con ellos configura cúmulos internos que comprimen los datos de entrada en cierto número de categorías de clasificación. Este tipo de aprendizaje es el aplicado en las Redes de Kohonen. (Lara, n.d.). 3.2 Procesamiento digital de imágenes El Procesamiento de Imágenes (PI) es una subcategoría del tratamiento digital de señales. Es la ciencia de manipulación de imágenes usando computadores para realizar procedimientos específicos según las aplicaciones y requerimientos del usuario, tales como: filtrado, recorte, segmentación, compresión y reconocimiento. Es un área del conocimiento que tiene atención de investigadores y escolares para desarrollar y mejorar algoritmos. para. aplicaciones. en:. robótica,. comunicaciones,. sensores. remotos,. biomedicina, automatización industrial, sistemas de inspección, navegación, mediciones ópticas, entre otras. (Jiménez, Pelayo, & Ramírez, 2015) Las prácticas de laboratorio son actividades pedagógicas, y en el estudio del PI éstas se realizan mediante el uso de algún software especializado. Algunos software comerciales de procesamiento de imágenes como: Photoshop, CorelDraw, Ulead Photoimpact, entre muchos otros, realizan procedimientos internos que no permiten el entendimiento de algoritmos, la lógica o el método del proceso, presentando cajas negras que no admiten su manipulación. Después de su uso, los estudiantes se vuelven expertos en la herramienta mas no en el procesamiento de imágenes, que por supuesto podría ser adecuado para diseñadores digitales, pero no para ingenieros electrónicos, ni de sistemas.(Jiménez et al., 2015) Se han realizado esfuerzos por el desarrollo de herramientas didácticas para la enseñanza del tratamiento digital de imágenes y existen paquetes comerciales para aplicación de laboratorios de PI, como por ejemplo MATLAB y Khoros, con desventajas similares a las herramientas de manipulación de imágenes comerciales, adicionando el elevado costo de licencias para su instalación. Existen también plataformas no comerciales independientes desarrolladas en C o Java, ambientes para el análisis de.
(34) 18. PROTOTIPO DE SISTEMA PARA LA GESTIÓN DE OCUPACIÓN DE PARQUEADEROS EN UN CENTRO COMERCIAL. imágenes tales como IPLab, colecciones de rutinas y clases sin ambientes y también gran cantidad de applets interactivos independientes en internet que permiten comprender. algoritmos. relacionados. con. el. tema.. Varias. universidades. han. implementado cursos virtuales para trabajar bajo herramientas E-Learning con los estudiantes interesados en PI, en donde se ha logrado hacer que el aprendiz reciba instrucciones acerca de la edición de imágenes y tener la opción de manipularlas en línea. (Jiménez et al., 2015) Para poder comprender claramente los conceptos y algoritmos del PI deben tener como prerrequisito el conocimiento de: algebra lineal, análisis multivariado y del procesamiento de señales, siendo estos conceptos muchas veces abstractos. Por esta razón es necesaria la práctica e interactividad con las herramientas de software para lograr efectos positivos en la comprensión de conceptos, ya que la enseñanza y aprendizaje de los fundamentos de PI se logra si la atención está en la representación visual de los algoritmos y el trabajo experimental. La visualización en PI puede considerarse como un factor de impulso cognitivo mientras la descripción plana textual requiere un poco de imaginación y habilidades interpretativas, con un resultado pedagógico positivo al visualizar herramientas para la demostración de aspectos básicos del procesamiento de imágenes. Muchas aplicaciones tales como: juegos de video, graficas por computador, pos-procesamiento de imágenes y video, estimación y compensación de movimiento, son implementados mediante soluciones de software en procesadores de propósito general. (Jiménez et al., 2015) Para que la aplicación en software sea útil en el aprendizaje del PI debe ser fácil de aprender, las tareas de PI deben poder implementarse en pequeños programas y las complejas usando sub-tareas, los programas deben correr lo más rápido posible, la visualización de las imágenes debe ser simple y rápida, y debe ser posible visualizar el progreso del procesamiento en cada una de sus etapas. En esencia, se busca utilizar una herramienta de software que permita a la vez aprender a utilizar un lenguaje de programación mientras se aplican los conceptos teóricos, para lo cual se pueden desarrollar aplicaciones en MATLAB, C++, C, Java, Visual Basic, Python, entre otros. (Jiménez et al., 2015).
(35) Capítulo 1. 19. Se ha planteado el uso de Python el cual permite desarrollar aplicaciones de alta calidad en la producción de software, con aplicabilidad en la investigación y el diseño de proyectos de nivel avanzado. Python es un lenguaje de programación de alto nivel, interpretado y multipropósito, cuyo creador es Guido Van Rossum. En los últimos años su utilización ha aumentado y es uno de los lenguajes de programación más empleados para el desarrollo de software. Python puede ser utilizado en diversas plataformas y sistemas operativos, entre los que se puede destacar: Windows, Mac OS X, Linux o Raspbian, el cual es el sistema operativo utilizado en este proyecto. Pero, además, Python también puede funcionar en smartphones y sistemas embebidos, por todas estas razones se decidió utilizar esta herramienta en el prototipo. (Jiménez et al., 2015). 3.3 Sustracción de fondo El método utilizado para discriminar el fondo de los objetos, se realiza a nivel de pixel. Para esto, para cada pixel se almacenan N muestras de frames anteriores al actual elegidos. aleatoriamente,. y. se. determina. que. son. fondo. aquellos. que. son. estadísticamente invariante en el tiempo. En la práctica se define N como 20. Para cada muestra, puede guardarse tanto la información de color (por ej. en el espacio de colores RGB) como su valor en tono de grises, dependiendo de la imagen de entrada con la que se cuenta. Como consecuencia de la detección o salida realizada por cada imagen o cuadro del video, se debe realizar un proceso de actualización del modelo que permita adaptar gradualmente la representación a los diferentes cambios que ocurren a lo largo de una secuencia. Esta actualización se realiza una vez realizada la sustracción de fondo en el cuadro actual y consiste en agregar en el modelo aquellos pixeles pertenecientes al fondo. Así mismo, aquellos clasificados como parte del movimiento se asegura que no se inserten en el modelo, ya que puede alterar significativamente los resultados en la detección.(Gervasoni, D’amato, & Barbuzza, 2014). 3.4 Scikit learn Sirve para realizar el proceso de aprendizaje automático de máquina o de una red neuronal el cual se trata de aprender algunas propiedades de un conjunto de datos y aplicarlos a nuevos datos. Esta es la razón por la cual una práctica común en el aprendizaje automático para evaluar un algoritmo es dividir los datos disponibles en dos.
(36) 20. PROTOTIPO DE SISTEMA PARA LA GESTIÓN DE OCUPACIÓN DE PARQUEADEROS EN UN CENTRO COMERCIAL. conjuntos, uno que llamamos el conjunto de entrenamiento en el que aprendemos propiedades de datos y otro que llamamos el conjunto de pruebas en el que probamos estas propiedades, esta herramienta la encontramos disponible en Python, y permite utilizar una red neuronal preestablecida y entrenarla según los parámetros que se deseen. (scikit-learn developers & Developers, 2017) En general, un problema de aprendizaje considera un conjunto de n muestras de datos y luego trata de predecir propiedades de datos desconocidos. Si cada muestra es más de un número único y, por ejemplo, una entrada multidimensional (también conocida como datos multivariables), se dice que tiene varios atributos o características. (scikit-learn developers & Developers, 2017). 3.5 MLPClassifier Herramienta de Scikit learn. MLPClassifieradmite la clasificación de clases múltiples aplicando Softmax como la función de salida. Además, el modelo admite la clasificación de etiquetas múltiples en la que una muestra puede pertenecer a más de una clase. Para cada clase, la salida sin procesar pasa a través de la función logística. Los valores mayores o iguales a 0.5 se redondean a 1, de lo contrario a 0. Para un resultado predicho de una muestra, los índices donde el valor es 1 representan las clases asignadas de esa muestra.(scikit-learn developers & Developers, 2017). 3.6 MLPRegressor Herramienta de Scikit learn. La clase MLPRegressor implementa un perceptrón multicapa (MLP) que entrena usando backpropagation sin función de activación en la capa de salida, que también puede verse como el uso de la función de identidad como función de activación. Por lo tanto, utiliza el error cuadrado como la función de pérdida y el resultado es un conjunto de valores continuos. MLPRegressor también admite la regresión de salida múltiple, en la cual una muestra puede tener más de un objetivo. (scikit-learn developers & Developers, 2017).
(37) Capítulo 1. 21. 3.7 BernoulliRBM Herramienta de Scikit learn. En el BernoulliRBM, todas las unidades son unidades estocásticas binarias. Esto significa que los datos de entrada deben ser binarios o tener valores reales entre 0 y 1, lo que significa la probabilidad de que la unidad visible se encienda o apague. Este es un buen modelo para el reconocimiento de caracteres, donde el interés está en qué píxeles están activos y cuáles no. Para las imágenes de escenas naturales, ya no se ajusta debido al fondo, la profundidad y la tendencia de los píxeles vecinos a tomar los mismos valores. (scikit-learn developers & Developers, 2017). 3.8 Máquina de Boltzmann La máquina de Boltzmann es una máquina estocástica constituida por unidades de proceso (neuronas) estocásticas con conexiones sinápticas simétricas entre las mismas. Dichas unidades de proceso son de dos tipos funcionales: visibles u ocultas. Las unidades visibles sirven de interfaz entre la red y el entorno en el que opera (recogen la información suministrada). Durante la fase de entrenamiento se ajustan los estados de todas las unidades visibles a estados específicos establecidos por los patrones de entrenamiento (entorno en el que opera) pueden ser, a su vez, de entrada o de salida mientras que las unidades ocultas siempre operan libremente y se utilizan para explicar restricciones subyacentes contenidas en los patrones de entrada.(Algoritmo, n.d.). 3.9 Raspberry pi En el centro de todas las placas Raspberry Pi se encuentra un semiconductor cuadrado, más comúnmente conocido como circuito integrado o chip. Este es el módulo system-onchip (SoC) Broadcom BCM2835, el encargado de proporcionarle a la RasPi sus capacidades de procesamiento de propósito general, de renderización de gráficos y de entrada/salida. Apilado sobre este chip se encuentra otro semiconductor, este es el encargado de proveer la memoria a la RasPi para el almacenamiento temporal de datos mientras sus programas se encuentran en ejecución. Este tipo de memoria es conocida como memoria RAM (memoria de acceso aleatorio), ya que la computadora puede leer o escribir en cualquier parte de la memoria y en cualquier momento. La RAM es volátil, lo que significa que cualquier cosa almacenada en esta memoria se eliminará cuando la RasPi pierda su energía o sea desenchufada.(Upton & Halfacree, 2013).
(38) 22. PROTOTIPO DE SISTEMA PARA LA GESTIÓN DE OCUPACIÓN DE PARQUEADEROS EN UN CENTRO COMERCIAL. Por la parte de arriba y de abajo del SoC se encuentran las salidas de video de la RasPi. El conector plata (abajo) es un puerto HDMI (High Definition Multimedia Interface), es del mismo tipo de conector que se puede encontrar en los reproductores de video y muchos decodificadores de cable y satélite. Cuando es conectado a un televisor o monitor moderno, el puerto HDMI proporciona video en alta resolución y audio digital. El conector amarillo (arriba) es un puerto de video compuesto y está diseñado para conectarse a televisores antiguos que no cuentan con conexión HDMI. La calidad del video es más baja que la que está disponible a través del HDMI y no transmite audio; en cambio, el audio es suministra como una señal analógica a través del conector de audio de 3.5mm a la derecha del conector del video compuesto. (Upton & Halfacree, 2013) En la esquina inferior de la placa está la toma de alimentación de la RasPi. Esta es una toma micro-USB, la misma que está presente en la mayoría de los modernos teléfonos inteligentes (smartphones) y tablets. La conexión de un cable micro-USB a un adaptador de energía adecuado encenderá a la Raspberry Pi; a diferencia de una PC o laptop, la RasPi no cuenta con un botón de encendido y arranca inmediatamente cuando el cable de la alimentación es conectado. (Upton & Halfacree, 2013) En la parte inferior de la placa Raspberry Pi, a mano izquierda, se encuentra una ranura para tarjetas SD. Una tarjeta de memoria SD (Secure Digital) proporciona el almacenamiento para el sistema operativo, los programas, datos y otros archivos, y no es volátil; a diferencia de la RAM volátil, la memoria SD conservará su información incluso cuando la energía se pierda. (Upton & Halfacree, 2013) El borde a mano derecha de la RasPi tendrá diferentes conectores dependiendo de qué modelo de Raspberry Pi tenga, el Modelo A o el Modelo B. Arriba de éstos se encuentran una serie de LEDs (Light Emitting Diodes). Los dos primeros LEDs que están etiquetados con ACT y PWR proporcionan una notificación de actividad y de energía respectivamente, y están presentes en todas las placas. La Raspberry pi 2 tiene: Una CPU ARM Cortex-A7 de cuatro núcleos a 900 MHz y 1GB de RAM. (Upton & Halfacree, 2013).
(39) 4 Ejecución de proyecto La descripción general del proyecto consiste en que se envía un pulso de voltaje a un minicomputador de placa única (Raspberry pi 2), en el momento que se presiona un pulsador, y así el sistema detecta cuando un usuario solicita un parqueadero, por otro lado una cámara de video, toma imágenes y las envía constantemente al minicomputador el cual basado en una red neuronal artificial le asigna un código alfanumérico y un código QR al usuario que solicita parquear. Este código QR contiene una dirección de página web en la que se ve un plano de vista superior del parqueadero, y una ruta desde la posición inicial hasta la plaza asignada. Un diagrama de bloques general del sistema es el siguiente: Figura 4-1: Diagrama de bloques general del sistema. Imágenes digitales.
(40) 24. PROTOTIPO DE SISTEMA PARA LA GESTIÓN DE OCUPACIÓN DE PARQUEADEROS EN UN CENTRO COMERCIAL. Cuando un usuario quiere solicitar una plaza de parqueo oprime el pulsador, en ese momento se envía un pulso de voltaje al minicomputador. Como se comentó anteriormente la mayoría de parqueaderos tienen sensores en cada plaza de parqueo para detectar si esta se encuentra libre u ocupada, en este caso decidimos utilizar un único sensor, se trata de una cámara de video, la cual nos aporta algunas ventajas como son: poco cableado, y recolección de mayor cantidad de información, lo que permite tener más estrategias para la identificación de automóviles, también se identificaron algunas desventajas como son: la calibración de la cámara con respecto a la posición del parqueadero o la sensibilidad a los cambios de luz, ya que al ser un solo sensor ,al momento de un fallo o cambio brusco no hay forma de saber si la información recibida es verdadera o falsa. La cámara tiene como función transmitir imágenes de las plazas de parqueo constantemente al minicomputador, El minicomputador, es el dispositivo central del sistema, este dispositivo se escogió ya que cumplía con los requerimientos necesarios para la implementación en el sistema los cuales eran: la capacidad de soportar y poder ejecutar sin problema Python y su respectivo procesamiento de imágenes, el procesamiento de datos de la red neuronal, todo esto sin llegar a bloquearse o exceder su capacidad operativa, también, se buscaba que el dispositivo tuviera puertos periféricos como puertos GPIO, puertos USB, puerto Ethernet, y puertos para salida de video; se encontró además que el dispositivo era económico, por lo que se evidencio que era la solución que mejor se acoplaba a este proyecto. El minicomputador tiene como función el procesamiento de los datos entrantes desde la cámara de video, ejecutando un algoritmo de reconocimiento, encargado de procesar las imágenes e identificar las plazas libres y ocupadas, con esta información se ejecuta una red neuronal artificial, que a su salida entregara una plaza específica para parqueo. Las otras funciones del dispositivo son: generar los códigos para el usuario y enviarlos para ser publicados en un monitor, así como también almacenar la información que se muestra en una página web. Una vez el procesamiento de las imágenes se ha realizado, se genera un código QR que es mostrado al usuario en un monitor, este código QR es leído por medio de un celular que posea el usuario, la información contenida en el código es la dirección de un página.
(41) Capítulo 1. 25. web, a la cual el usuario podrá ingresar conectándose a la red local del centro comercial, en la página web se encuentra publicado un plano de vista superior del parqueadero, que contiene una ruta que indica el camino desde la posición inicial del usuario, hasta la plaza asignada, esta página se genera con la finalidad de dar una guía al usuario en la búsqueda de la plaza de parqueo asignada.. 4.1 Metodología Se realizó el proceso de recopilación de información sobre conceptos fundamentales a tener en cuenta y de proyectos similares o fuentes bibliográficas que aportaran al contenido del proyecto, y se presentan en el marco teórico y de referencia, para así poder estimar la alternativa de solución que más beneficios adicionaba a los objetivos propuestos. Se definió la forma de realización del algoritmo, necesario tanto para la configuración del controlador como para la interpretación de los datos recibidos del sistema, marcando una ruta de acción específica para el desarrollo del algoritmo y su correlación con la publicación en el monitor y la página web. Así mismo Con la información recolectada se hizo una evaluación de los requerimientos tanto físicos como tecnológicos de cada una de las etapas, determinando así las posibilidades o limitaciones físicas que presentaban. Una vez se realizó la adquisición de datos, la ejecución de los códigos, y la publicación en los diferentes medios, se realizaron las pruebas necesarias de funcionamiento en conjunto, es decir el acoplamiento de las diferente partes del código o de las diferentes tareas de dichos códigos; a continuación se realizaron las correcciones a las que había lugar y las modificaciones de la visualización de las operaciones realizadas. Cuando todo estuvo debidamente diseñado, montado y acoplado se realizaron pruebas de funcionamiento al sistema, y con esto se obtuvieron los datos necesarios para evaluar el comportamiento y verificar si el sistema funcionaba de manera correcta. El análisis realizado con los resultados de dichas pruebas arrojo que efectivamente el sistema funciona de forma correcta, y se puede concluir que se cumplieron los objetivos propuestos y se obtuvieron los resultados esperados..
(42) 26. PROTOTIPO DE SISTEMA PARA LA GESTIÓN DE OCUPACIÓN DE PARQUEADEROS EN UN CENTRO COMERCIAL. 4.2 Características del prototipo Para efectos de estabilidad en la captura de imágenes, y para facilidad y protección de los dispositivos, se creó una estructura en madera que sirve de soporte para todos los componentes del proyecto, esta estructura y sus dimensiones se muestran a continuación: Figura 4-2: Dimensiones de la estructura en madera del prototipo.
(43) Capítulo 1. 27. La distribución del parqueadero diseñada para el prototipo, se encuentra instalada en la base de la estructura, muestra la de las zonas de parqueo y las flechas que representan el sentido de circulación que deben tener los autos, es utilizada para realizar las pruebas de funcionamiento del sistema, y tiene las siguientes dimensiones: Figura 4-3: Dimensiones del parqueadero diseñado para el prototipo. En el interior del prototipo se necesitan condiciones de luz controlada, por esto se realizó la instalación de dos leds de luz blanca, cada uno de 10w, esto con el fin de que las imágenes se vean claras, y que la luz en el interior no varié durante el funcionamiento, en lo posible, es importante impedir que no entre luz externa. El prototipo cuenta con un pulsador para la asignación de plazas de parqueo. Este pulsador está conectado directamente al minicomputador, estos dos elementos junto con la cámara digital, fueron acoplados en la estructura manera fija, para minimizar los riesgos por caída y para volver las capturas de la cámara estables ya que a menos movimiento de la cámara la captura de las imágenes será mejor, también se fijó la cámara a una distancia focal fija de 50 cm, para que su enfoque no varié..
(44) 28. PROTOTIPO DE SISTEMA PARA LA GESTIÓN DE OCUPACIÓN DE PARQUEADEROS EN UN CENTRO COMERCIAL. 4.3 Metodología para tratamiento de imágenes El propósito fue diseñar un sistema capaz de identificar los elementos y características de una escena o imagen del parqueadero usado en el prototipo, y de esta forma lograr extraer información simbólica a partir del reconocimiento de objetos y estructuras presentes en la imagen. Para lograrlo se llevan a cabo cuatro actividades principales: Figura 4-4: Metodología usada para el tratamiento de imágenes. Se usan técnicas de procesamiento de imágenes en Python y herramientas como OpenCv, que están estrechamente relacionadas con la visión artificial, se utilizan para facilitar la localización y detección de áreas de interés en las imágenes..
(45) Capítulo 1. 29. El diagrama de flujo que explica el algoritmo que se utilizó en el tratamiento de imágenes es el siguiente: Figura 4-5: Diagrama de flujo tratamiento de imágenes.
(46) 30. PROTOTIPO DE SISTEMA PARA LA GESTIÓN DE OCUPACIÓN DE PARQUEADEROS EN UN CENTRO COMERCIAL. 4.4 Pruebas de imagen Para realizar estas pruebas se utilizó una cámara digital con las siguientes características: tiene una conexión al minicomputador por medio de USB, alcanza una tasa de unos 15 a 30 fotogramas por segundo, y tiene la posibilidad de utilizarse en las siguientes resoluciones (320x240) y (640x480). Para este proyecto se decidió trabajar con la resolución de (320x240) ya que tiene menos cantidad de pixeles y por lo tanto el procesamiento de cada imagen se hace más rápido, así mismo si el procesamiento se realizara con la resolución de (640x480) se obtendrían más información en cada imagen pero el procesamiento demoraría más, para efectos de este prototipo la imagen con resolución de (320x240) resulto con la suficiente información, por lo tanto se eligió. Para el uso de la cámara de video se utiliza la librería open.cv de Python, que se encarga del procesamiento de las imágenes. Figura 4-6: Algoritmo para iniciar prueba de imagen. Primero se inicializa la cámara física con la línea cap = cv2.videoCapture Después se le asigna una resolución de 320 x 240, se escoge esta resolución para facilitar el procesamiento de la imagen, y optimizar los recursos de procesamiento en el minicomputador. Se comienza un ciclo while infinito, donde en cada ciclo se capturara una imagen, que será analizada para detectar los vehículos y las plazas de parqueo..
(47) Capítulo 1. 31. Figura 4-7: Algoritmo del ciclo while utilizado para captura de imágenes. Se captura una imagen por medio de la cámara, utilizando la línea cap.read(). Esta imagen se convierte del formato RGB al Formato HSV para facilitar su procesamiento ya que se pasa la imagen de un formato de colores a un formato de contraste, esto facilita la identificación de objetos sin importar su color. Grisimg es la conversión de la imagen de HSV a blanco y negro. Frame2 es la imagen de referencia, ya que para detectar los automóviles que entren al parqueadero, se hace por medio del método de sustracción de fondo, donde se toma una imagen de referencia (frame2) que corresponde al parqueadero vacío. Esta imagen de referencia se resta con cada imagen actual para notar los cambios en esta y así detectar si ha cambiado algo, lo cual puede ser un vehículo que ocupe una plaza de parqueo. Esta imagen de referencia se toma una sola vez, esto se hace por medio de la variable bol, ya que al entrar en el if, está cambia de valor y no se vuelve a cumplir la condición de bol == 0. Después de tomar la imagen actual, se hace la resta entre esta y la imagen de referencia por medio de la línea cv2.absdiff. Figura 4-8: Línea de código para realizar resta de imágenes. Si las imágenes son iguales el resultado (cam) es una imagen totalmente negra..
(48) 32. PROTOTIPO DE SISTEMA PARA LA GESTIÓN DE OCUPACIÓN DE PARQUEADEROS EN UN CENTRO COMERCIAL. Figura 4-9: Primera comparacion entra la imagen actual y el resultado de la resta. Si las imágenes son diferentes, en el resultado (cam) se nota la parte que es diferente. Figura 4-10: Segunda comparacion entra la imagen actual y la imagen re reconocimiento. Figura 4-11: Algoritmo de la máscara para identificar cambios en la imagen.
(49) Capítulo 1. 33. Seguidamente a la imagen en blanco y negro se le aplica una máscara y se le hace una dilatación para identificar de manera precisa y concreta los cambios entre la imagen de referencia y la imagen actual. En la imagen dilata, guardada en (resm), y se aprecian los objetos que se detectaron por medio de la diferenciación de la imagen actual y la imagen de referencia. Con cv2.mpments (resm) obtenemos información sobre los objetos marcados en la imagen dilatada guardada en (resm) donde m00 corresponde al área de los objetos encontrados. Figura 4-12: Algoritmo utilizando cv2.mpments (resm). Si el área del objeto es mayor a 50 se da la instrucción de hallar sus contornos con cv2.findContours, y después se halla el contorno externo de los objetos. Figura 4-13: Línea de código para identificación de contorno. Se crean los vectores matapx y matapy, que limitan el área de cada una de las plazas de parqueo, esto se crea para tener identificadas la totalidad del área de dichas plazas. Figura 4-14: Definición de los vectores matapx y matapy..
(50) 34. PROTOTIPO DE SISTEMA PARA LA GESTIÓN DE OCUPACIÓN DE PARQUEADEROS EN UN CENTRO COMERCIAL. Figura 4-15: Vista grafica de la delimitación de los vectores matapx y matapy. Después de hallar el contorno de los objetos diferentes entre las imágenes, se halla un rectángulo que encierra al objeto por completo, por medio de la línea cv2.boundingRect que retorna x, y, w, h. Figura 4-16: Esquina del rectángulo del cual se toman las coordenadas. Donde x y y representan las coordenadas en pixeles de la esquina superior izquierda, y w y h son el alto y el ancho en pixeles del rectángulo..
(51) Capítulo 1. 35. Figura 4-17: Prueba de comparación y detección en sus diferentes capaz. Después de esto se hace un barrido por todas las plazas de parqueo, por medio de los vectores matapx y matapy, si en una de estas se encuentra un objeto, se dibuja en rojo sobre la pantalla, y se guarda su estado como ocupada, de lo contrario se dibuja en pantalla esta plaza de parqueo en amarillo y su estado pasa a ser desocupado. Después de 50 ciclos sin cambios en la imagen de resta, se toman los valores de estado de cada plaza de parqueo y se transfieren estos datos a la matriz parb. Figura 4-18: Algoritmo con GPI0.Input(5) para detectar acción en el pulsador.
Figure
+7




Documento similar