INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
“SIMULADOR DE PUNCIÓ
N INTRAVENOSA EN
BRAZO COMO APOYO A LA ENSEÑANZA BÁ
SICA DE LA MEDICINA”
T E S I S
Q U E P A R A O B T E N E R E L T Í T U L O D E :
INGENIERO EN COMUNICACIONES Y ELECTRÓNICA
P R E S E N T A N
AARÓN CASTELLANOS SÁNCHEZ
DIANA YERI RAMÍREZ GARCÍA
EVELIO ROBLEDO DE LA CRUZ
ASESORES:
JAFETH ASCENCIÓN ALONSO CARREÓN JORGE ALEJANDRO ANZALDO BUSTOS
OBJETIVOS
GENERAL
Diseñar un simulador de punción intravenosa en brazo para la evaluación práctica de los estudiantes de la enfermería y la medicina, mediante técnicas de visión por computadora.
PARTICULAR:
Diseñar una aplicación para el reconocimiento de objetos aplicado al simulador de punción intravenosa.
Diseñar la interfaz gráfica de usuario (GUI) para que el usuarios y el prototipo puedan interactuar.
JUSTIFICACION
La punción intravenosa es una técnica comúnmente usada para aportar líquidos y solutos directamente al espacio extracelular, especialmente en el sistema venoso por medio de un catéter, sin embargo, una mala aplicación de la técnica puede generar daños que van desde una perforación transversal de la vena en que realiza la punción, un edema, una equimosis hasta a una trombosis del vaso o una sepsis y en consecuencia provocar el deceso del paciente.
El no tener la práctica adecuada para llevar a cabo este tipo de procedimientos puede tener las consecuencias anteriormente mencionadas y puede repercutir en demandas por complicaciones secundarias de aplicación de venóclisis.
ÍNDICE
CAPITULO I: ANALISIS………..7
1.1 Introducción Médica: Punción Intravenosa..………..………..7
1.1.1 Elección de la vena: ventajas y desventajas..………8
1.1.2 Elección del dispositivo de punción Intravenosa...……….10
1.1.3 Técnica de punción intravenosa..………...11
1.2 Introducción Técnica: Visión Por Computadora..……….11
1.2.1 Métodos utilizados en las 4 primeras etapas de sistema de visión por computadora. .13 Modelo de color RGB. ………..13
Pre procesamiento. ……...………16
o Escala de grises. ………...16
o Realzado. ……….17
o Eliminación de ruido. ………...17
Detección de bordes. ………...17
o Operadores basados en mascaras direccionales. ………..17
o Transformada de Hough. ………18
Etiquetado. ……….19
1.3 Planteamiento del problema. ……….………..19
Encuesta 1. ……….……….………..20
Encuesta 2. ……….………20
1.4 ALCANCE. ……….………23
1.5 RECURSOS. ……….……….23
1.5.1 Análisis costo-beneficio. ………..23
1.6 METAS. ……….………..24
1.7 PROPUESTA DE SOLUCIÓN. ……….………..25
1.8 HERRAMIENTAS DE TRABAJO. ……….……….25
1.8.1 MATLAB. ……….………..25
1.8.2 Gel de balístico. ……….……….26
CAPITULO II: DISEÑO..……….………...27
2.1 REVISIÓN DE LA PROPUESTA DEL ANÁLISIS. ……….….27
2.2 DISEÑO PRELIMINAR..……….………..27
2.3 DISEÑO DETALLADO. ……….………...28
2.3.1 Interfaz gráfica de usuario (GUI). ………30
2.3.2 Modelo del brazo. ……….………..30
CAPITULO III: CONSTRUCCION. ……….………35
3.1 CONSTRUCCIÓN DEL CÓDIGO. ……….………35
3.2 DESARROLLO DE LA GUI. ……….………..37
CAPITULO IV: IMPLEMENTACION………...39
4.1 PREPARACION PARA LA IMPLEMENTACION………39
4.2 IMPLEMENTACION Y PRUEBAS. ………..39
CONCLUSIONES………42
BIBLIOGRAFIA………...43
INDICE DE FIGURAS
CAPITULO I.
1.1 Red venosa dorsal del brazo………...8
1.2 El catéter y sus partes………10
1.3 Diagrama a bloques de las etapas y métodos de visión por computadora………...13
1.4 Síntesis aditiva de color. Sistema RGB………...15
1.5 Esquema simplificado del espacio RGB………...15
1.6 Mascaras de Kirsch………..17
1.7 Colocación incorrecta de la aguja………21
1.8 Cambio de posición en la aguja. ………..…………21
1.9 Movimiento hacia adelante. ………..….21
1.10 Bisel contra pared de vena. ………..22
1.11 Vena colapsada por bisel. ……….22
1.12 Hematoma en brazo. ………..22
1.13 Arteria atravesada por aguja……….22
CAPITULO II. 2.1 Diseño preliminar del prototipo………..27
2.2 Diagrama de flujo de la aplicación……….29
2.3 Interfaz gráfica de usuario………30
2.4 Brazo de yeso………..31 2.5 a 2.8 Etapas de visión por computadora usando un modelo de yeso………31,32 2.9 Modelo del brazo de fibra de vidrio………...32
2.10 a 2.13 Etapas de visión por computadora usando un modelo de fibra de vidrio………...33 2.14 Modelo Final del brazo………34
CAPITULO III. 3.1 Resultado de la aplicación de la transformada de Hough………..36
3.2 Vista de la pantalla de la aplicación………..37
7
CAPITULO I: ANALISIS
A lo largo de este capítulo, se definirán conceptos teóricos de punción intravenosa así mismo analizaremos la forma en que se realiza correctamente la técnica de aplicación de la misma. De la igual manera analizaremos los elementos técnicos que van a ser utilizados para hacer un modelo real aplicando métodos de ingeniería.
También explicaremos la problemática que se presenta cuando se realiza la punción intravenosa y se propondrá una solución para mejorarlos. Para entender los términos médicos que se utilizan a lo largo de este capítulo en el anexo I se muestra un glosario de términos.
1.1 INTRODUCCION MÉDICA: PUNCION INTRAVENOSA
Empezaremos por hacer un breve análisis de punción intravenosa, para que de esta manera, se puedan explicar a grandes rasgos, la definición de esta técnica y poder tener un panorama más amplio de la misma; por lo anterior, esta parte del proyecto la basaremos en la obra terapia intravenosa de Joane C. La Rocca y Shirley E. Otto.
“La mayoría de los enfermos hospitalizados reciben tratamiento IV a diario. Por tanto a medida que aumenta el número de afecciones tratadas fuera de los centros de asistencia aguda, el personal de enfermería de todos los centros debe ampliar sus conocimientos sobre el tratamiento IV.
IV significa intravenoso, lo que quiere decir dentro de la vena. Para la terapéutica IV, un catéter o una aguja se introduce en una vena, generalmente de la mano o del brazo. El catéter o la aguja se una al tubo y a un recipiente con líquido, que constituye una forma de administrarle medicamentos y líquidos.”1
La punción intravenosa es eje central de este proyecto, ya que se pretende obtener un simulador de la técnica mencionada con el cual los estudiantes de enfermería podrán mejorar sus habilidades para la aplicación de la misma.
A continuación se detalla una breve teoría de la elección de vena en donde se debe hacer la punción, debido a que es necesario para hacer la elección del modelo que se va a desarrollar en el presente trabajo.
1
8 1.1.1 Elección de la vena, ventajas y desventajas.
La principal etapa de la técnica de venóclisis es la elección de la vena; ya que según señalan los especialistas hay varias consideraciones que deben ser tomadas en cuenta para una aplicación correcta de la técnica.
“Como regla general, inicialmente, deberán emplearse las venas distales de las manos y brazos y las punciones venosas posteriores deberán ser proximales a los puntos anteriores. Las venas utilizadas generalmente para el tratamiento IV son la basílica, la cefálica y las interóseas. Para elegir la vena correctamente es necesario seguir las siguientes normas:
1. Utilizar primero venas distales
2. Utilizar el brazo no dominante del paciente, si es posible.
3. Elegir una vena lo bastante grande como para que circule sangre suficiente alrededor del catéter.”2
Como se puede ver las venas de los brazos y manos son las más usadas para hacer las punciones intravenosas para infiltrar solutos o sacar sangre, por lo que se ha decidido que el modelo que se va a diseñar es de un brazo de fibra de vidrio, por lo tanto, a continuación se analizaran las venas que existen y pueden ser usadas para la venopunción, para igualmente decidir que parte del brazo se enfocará la cámara en este proyecto.
Con el fin de ilustrar mejor las venas que a continuación se mencionan se muestra la figura 1.1.
1.1 Red venosa dorsal del brazo3
2
Ibídem. Páginas 20 y 21 3
Figura 1.1: Red venosa dorsal del brazo. Fuente:
9
“Las venas digitales corren por la cara lateral de los dedos y están unidas con las venas dorsales mediante ramas comunicantes.
Ventajas: A veces son las únicas venas disponibles.
Desventajas: Sólo pueden utilizarse catéteres de pequeño calibre, se infiltran fácilmente y no son adecuadas para tratamiento prolongado.
Las venas dorsales superficiales (del metacarpo o la mano) nacen de la unión de las venas digitales.
Ventajas: Permiten el movimiento del brazo, son fáciles de ver y de palpar y los huesos de la mano fijan el catéter.
Desventajas: Los enfermos activos pueden desplazar el catéter, el vendaje se humedece fácilmente al lavarse las manos y si se aplica una limitación a la muñeca puede ocluirse el punto.
Las venas cefálicas se encuentran en el lado radial (pulgar) del antebrazo. Son más pequeñas y en general, son más curvas que las venas basílicas
Ventajas: Se puede utilizar un catéter de mayor diámetro para las infusiones rápidas, fijado por los huesos del brazo; son en general una buena elección. Desventajas: Se curvan más en su ascenso por el brazo que las venas
basílicas, esto solo es inconveniente cuando se utilizan catéteres de tubo muy largo.
Las venas basílicas están en el lado cubital del antebrazo, corren por la cara posterior o dorso del brazo y luego se curvan hacia la superficie anterior o región ante cubital. Luego ascienden rectas por el brazo y penetran en los tejidos profundos.
Ventajas: Además de contar con las mismas ventajas que las venas cefálicas, estas venas son las más rectas que hay en el brazo.
Desventajas: Pueden tener tendencia a desplazarse; puede ser necesario colocar al miembro del paciente en una posición incómoda durante la punción.
Las venas ante cubitales/medianas nacen de las venas del antebrazo y generalmente se dividen en dos vasos, uno que se une a la basílica y el otro a la cefálica. Por lo general se emplean para la toma de muestras de sangre.
Ventajas: Fácil acceso, grandes, tienden a ser estable. Desventajas: Pueden limitar los movimientos del brazo del paciente, frecuentemente son precisas para la toma de muestras de sangre.”4
4
10
Con base a lo anterior se deduce que la venopunción más común es a la altura del codo, porque es un área de fácil acceso para quien lo aplica y que no inmoviliza tanto al paciente, será esta la parte a la que se enfocará la cámara de este modelo, la cual posteriormente se explicará.
A continuación se explican de manera breve los tipos de dispositivo con los que puede realizar una punción venosa.
1.1.2 Elección del dispositivo de punción intravenosa
Para realizar punciones IV es necesario un tipo de aguja diferente de acuerdo al tipo de tratamiento que se vaya a aplicar al paciente así como a la edad del mismo. Se muestra en la figura 1.2 la imagen de un catéter, que señala cada una de las partes del mismo, para su mejor conocimiento.
“Las agujas de acero, de mariposa, se emplean en situaciones cortas, limitadas. Son fáciles de colocar, pero infiltran fácilmente la vena. Un mejor diseño permite numerosas elecciones en catéteres periféricos cortos, las consideraciones al elegirlo son el tamaño y estado de la vena elegida y la edad del paciente:
1. Calibre 16: cirugía mayor o traumatismos.
2. Calibre 18: sangre y derivados de la sangre, administración de medicamentos viscosos
3. Calibre 20: la mayoría de las aplicaciones para el paciente promedio. 4. Calibre 22: Especialmente para niños y ancianos.
5. Calibre 24: Pacientes pediátricos y recién nacidos.
Cuanto mayor es el calibre, menor es el diámetro interior del catéter.”5
1.2 El catéter y sus partes6
5
[image:10.612.184.460.505.664.2]11
Como se menciono en los párrafos anteriores las agujas se seleccionan de acuerdo al caso, nuestro proyecto es enfocado a los pacientes adultos promedio.
En el tema siguiente se tratara la técnica de punción, para conocer la forma correcta en que dicha técnica debe realizarse.
1.1.3 Técnica de Punción Intravenosa
Se debe proceder de la siguiente manera:
Coloque el torniquete entre 10-15 cm por encima de la zona que va a observar.
Espere unos segundos a que se rellenen los trayectos venosos. Se puede favorecer la dilatación del vaso con varias maniobras: friccionando la extremidad desde la región distal hacia la proximal (por debajo del torniquete); abriendo y cerrando el puño; dando golpecitos con el dedo; y aplicando calor (con una compresa caliente o friccionando la zona con alcohol).
Observe y palpe los trayectos venosos una vez bien dilatados y rellenos.
Elija el lugar de punción.
Una vez elegido el lugar de la punción Insertar la aguja, previa asepsia de la región, con el bisel hacia arriba apoyándose sobre un plano resistente y formando un ángulo de entre 40 y 25 grados (el ideal es de 30°) entre la jeringa y el sitio a puncionar.
Punzar firmemente el área elegida.
Retirar la ligadura o torniquete y sujetar con micropore o tela adhesiva el catéter, o en el caso de inyección introducir el líquido lentamente, y retirar la aguja.
1.2 INTRODUCCION TECNICA: VISION POR COMPUTADORA
Tal como se mencionó anteriormente, al aplicar la técnica de la venopunción es necesario que el aplicador conozca el procedimiento adecuado para llevarla a cabo, dentro de ese procedimiento algo muy importante es el ángulo al que se debe hacer la incidencia, deben existir 30° entre la jeringa y el sitio a puncionar.
La visión por computadora se divide en varios procesos al igual que la vista del ser humano, los ojos, órganos de la vista en conjunto con el cerebro se ocupan de formar y procesar las imágenes. En la visión por computadora, una cámara digital en conjunto con una computadora realiza la misma acción.
En el caso que nos ocupa, la visión por computadora es sumamente importante ya que permitirá que al realizar una venopunción el aplicador podrá saber si aplico bien la técnica o 6
Figura 1.2: El catéter y sus partes. Fuente:
http://t1.gstatic.com/images?q=tbn:ANd9GcSyYaGiXAptW5UMjPFhgsqry5iaBNHQgNwXXYfYmsfCJ3RFPsyqHECMybGOwQ
12
no, debido a que la imagen captada al momento de hacer la incidencia le serán aplicados los procesos pertinentes de la visión por computadora y de este modo con una aplicación previamente elaborada podrá ver los resultados en pantalla.
“Visión es la ventana al mundo de muchos organismos. Su función principal es reconocer y localizar objetos en el ambiente mediante el procesamiento de las imágenes. La visión computacional es el estudio de estos procesos, para entenderlos y construir maquinas con capacidades similares.
Un área muy ligada a la de visión computacional es la de procesamiento de imágenes. Aunque ambos campos tienen mucho en común, el objetivo final es diferente. El objetivo de procesamiento de imágenes es mejorar la calidad de las imágenes para su posterior utilización o interpretación, por ejemplo:
remover defectos,
remover problemas por movimiento o desenfoque,
mejorar ciertas propiedades como color, contraste, estructura, etc. agregar colores falsos" a imágenes monocromáticas.”7
La visión por su parte se subdivide en 6 etapas principales para la edición de la imagen:
1. Sensado: Es el proceso que nos lleva a la obtención de una imagen visual. Nótese que la adquisición, puede ser tan simple como usar una imagen ya existente de forma digital. Generalmente, el escenario de la adquisición de datos, involucra pre procesamiento tal como el escalado.
2. Pre-procesamiento: Trata de las técnicas de reducción de ruido y enriquecimiento de detalles en la imagen. Está entre las más sencillas y atractivas áreas del procesamiento digital de imágenes. Básicamente, la idea detrás de la ampliación, es brindar el detalle que se encuentra oscurecido. O simplemente resaltar ciertas características de interés en una imagen. Un ejemplo familiar de la ampliación es cuando aumentamos el contraste de una imagen porque “Se ve mejor” Es importante mantener en mente, que la ampliación, es un área muy subjetiva del procesamiento de imágenes.
3. Segmentación: Es el proceso que hace particiones a una imagen en objetos de interés. Es un área que también trata de mejorar la apariencia de una imagen. Como siempre, aunque la ampliación es subjetiva, la restauración de imágenes, es objetiva. En el sentido de que las técnicas de restauración tienden a ser basadas en modelos matemáticos o probabilísticos de degradación de imágenes. El mejoramiento, por otro lado está basado en preferencias subjetivas humanas con respecto a lo que constituye un “buen” resultado en el mejoramiento de una imagen.
4. Descripción: Trata con el cómputo de características útiles para diferenciar un tipo de objeto de otro.
7
13
5. Reconocimiento: Es el proceso que identifica esos objetos.
6. Interpretación: Asigna un significado a un conjunto de objetos reconocidos.
[image:13.612.137.507.171.460.2]En este caso en concreto solo es necesario utilizar las primeras 4 etapas mencionadas anteriormente. Tal como se muestra en el diagrama a bloques de la figura 1.3 será la forma en la que trataremos la visión por computadora.
Figura 1.3: Diagrama a bloques de las etapas y métodos de visión por computadora.
1.2.1 Métodos Utilizados en las 4 primeras etapas del Sistema de Visión Por Computadora.
Modelo De Color RGB (Sensado)
La adquisición de imágenes digitales es la primera etapa del Sistema de Visión Por Computadora.
14
Un dispositivo físico que sea sensible a la banda visible del espectro electromagnético y que produzca una señal eléctrica proporcional al nivel de energía percibido.
Un cable por donde la señal eléctrica sea transmitida.
Un digitalizador encargado de convertir la señal eléctrica del dispositivo físico.
Para el caso que nos ocupa, la captación de la imagen se hará por medio de una cámara digital.
Para que una imagen analógica en blanco y negro, en escala de grises o a color, pueda ser "manipulada" usando un ordenador, primero debe convertirse a un formato adecuado. Este formato es la imagen digital correspondiente.
La transformación de una imagen analógica a otra discreta se llama digitalización y es el primer paso en cualquier aplicación de procesamiento de imágenes digitales.
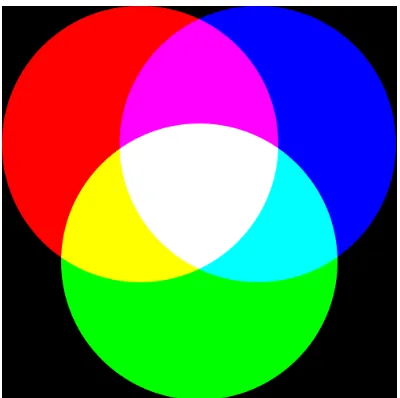
El modelo de definición de colores usado en trabajos digitales es el modelo RGB (del inglés Red, Green, Blue; “Rojo, Verde, Azul”) y hace referencia de su composición a partir de la intensidad de los colores primarios que lo integran. Este es un modelo de color basado en lo que se conoce como síntesis aditiva, y hace posible representar un color por la adición de los mismos (la suma de todos produce blanco).
Se parte del modelo RGB debido a que el ojo humano percibe ciertas radiaciones que se encuentran en lo que llamamos “espectro visible”. Éstas son distinguidas por la retina, así como células foto receptoras que se encargan de captar la luminosidad, diversos conos son los encargados de captar los distintos tipos de radiaciones que existen:
Conos R: captan las radiaciones rojas. Conos G: captan las radiaciones verdes. Conos B: captan las radiaciones azules.
Con el modelo RGB podemos representar un amplio porcentaje del espectro visible combinando estos tres colores en distintas proporciones e intensidades.
15
Figura 1.4: Síntesis aditiva de color. Sistema RGB8
El modelo RGB es un sistema de coordenadas cartesianas. Para indicar con qué proporción se mezcla cada color, le asignamos un valor a cada uno de los colores primarios, así, por ejemplo, el valor 0 significa que no interviene en la mezcla, y en la medida que ese valor aumenta, aportará más intensidad a la mezcla. Tal como se muestra en la figura 1.5:
Figura 1.5: Esquema simplificado del espacio RGB.9
8
Figura 1.4: Síntesis aditiva de color. Disponible en: http://www.hgrdesign.es/wp-content/uploads/2010/01/color-rgb.png. Fecha de consulta: 16/04/2011
9
[image:15.612.154.488.396.607.2]16
La diagonal principal representa los niveles de grises, y como se aprecia en la figura se extiende desde el negro al blanco a lo largo de la línea uniendo estos 2 puntos. La variación de colores depende de los puntos sobre o dentro del cubo, éstos serán definidos por vectores.
Una imagen representada en RGB, incluye tres canales de color y además cada uno con un valor formado por 8 bits de información, lo que ofrece 256 tonos de cada color y 16,7 millones de colores al combinarlos.10
Pre-Procesamiento
Ya que se adquirió la imagen por medio de la cámara integrada en el simulador, se procede a convertirla a escala de grises; este método será el hincapié para el tratamiento de la imagen, se procede a hacer comparaciones tanto de la intensidad de la luminosidad de los colores como la claridad de la misma. Una vez en escala de grises se le hará un realzado con esto conseguimos acentuar las aristas de la imagen y con esto más contraste por lo tanto los objetos aparecerán más resaltados; ahora que nuestros objetos se aprecian mejor solo resta eliminar el ruido que es todo aquello no es de nuestro interés en nuestra imagen.
Escala De Grises
Consiste en una matriz de [M x N] valores en donde cada pixel es una sola muestra que contiene la información de la intensidad de la imagen.
Las tres características con que se puede definir un color son:
1.- Tono o Matiz.
2.- Luminosidad u Oscurecimiento.
3.- Saturación (Pureza del color).
Por lo tanto la conversión de una imagen de color a una imagen en escala de grises no se realiza de forma única, sin embargo se trata de retener la información de la luminosidad y descartar los valores de tono y saturación.
La escala de grises utiliza variaciones de negro para representar una imagen. Los objetos en escala de grises tienen un valor de brillo comprendido entre el 0% (blanco) y el 100% (negro).11
10
17 Realzado
Consiste en resaltar el detalle que se encuentra oscurecido. O simplemente resaltar ciertas características de interés en una imagen.
Un ejemplo de esto, es aumentar el contraste para ver una imagen más detallada.
Eliminación de Ruido
Se basa en eliminar aquellos píxeles cuyo nivel de intensidad es muy diferente al de sus vecinos y cuyo origen puede estar tanto en el proceso de adquisición de la imagen como en el de transmisión, es decir, eliminar cualquier entidad en las imágenes, datos o resultados intermedios que no son interesantes para la computación que se pretende llevar a cabo.12
Una vez aplicados los métodos mencionados se tendrá una imagen más adecuada para su edición posterior que constara en segmentarla, esto es dividir la imagen en objetos de interés. La segmentación se logra gracias a la detección de bordes que se centra en localizar los contornos que delimitan el borde de un objeto.
Detección De Bordes (Segmentación)
Operadores Basados En Mascaras Direccionales
Una de las aplicaciones fundamentales del gradiente es la detección de bordes, un borde es el límite entre regiones con distintos tonos de gris, detectar un borde se trata básicamente escalón similar para cualquier dirección dentro de una imagen. Existen distintos tipos de filtros aplicables a tal función, como son las máscaras de Kirsch; formadas por 8 máscaras que representan 8 orientaciones, como se muestra a continuación:13
11
Fuente:
http://help.adobe.com/es_ES/Illustrator/13.0/help.html?content=WS714a382cdf7d304e7e07d0100196cbc5f-6290.html.Fecha de Consulta 19/04/2011
12
Ibídem. Páginas 20 y 21 13
18
Figura 1.6: Mascaras de Kirsch.14
Para nuestro caso en concreto utilizamos la mascar de Kirsch 315° puesto que al hacer pruebas con otros filtros nos percatamos que este era el más propicio ya que no presentaba demasiado ruido y los objetos de nuestro interés en la imagen se visualizan mejor.
Transformada De Hough
Este algoritmo está diseñado para detectar líneas. En su procesamiento emplea el conjunto total de la imagen, haciéndolo robusto ante la presencia del ruido o discontinuidades de las etapas previas. De hecho, para su ejecución requiere de una imagen binarizada en la que se ha seleccionado previamente los bordes. Por tanto, la entrada al algoritmo de Hough es una imagen en la que se ha hecho la detección de los bordes. Hough, desde una perspectiva global, intentará extraer primitivas de más alto nivel como son líneas, circunferencias, elipses o cualquier tipo de curva parametrizada o no. Se basa en la representación paramétrica de una línea:
rho = x*cos (theta) + y*sin (theta).
En donde:
La variable rho es la distancia que existe del origen de la línea a un vector perpendicular a esta y theta es el ángulo que existe entre el eje X y el vector.
La transformada estándar de Hough (SHT, por sus siglas en inglés) es una matriz de espacio parametrizada cuyas filas y columnas corresponden a los valores de rho y theta respectivamente. Los elementos de la SHT representan las celdas acumuladoras. Inicialmente cada celda esta puesta en cero (0). Entonces, por cada punto nonbackground en la imagen, rho se calcula para cada teta. Rho se completa con la fila más cercana permitida en SHT. La celda del acumulador se incrementa. Al final de este procedimiento, devolverá un valor de Q en SHT (r, c), esto es, que los puntos Q en el plano XY se encuentran en la línea
14
19
indicada por theta (c) y rho (r). Los valores máximos en el SHT representan las líneas potenciales en la imagen de entrada.15
Etiquetado (Descripción)
Es el proceso que asigna una etiqueta (por ejemplo: “vehículo”) a un objeto basado en sus descriptores. El conocimiento acerca del dominio de un problema esta codificado en un sistema de procesamiento de imágenes, en forma de una base de conocimiento. Este conocimiento puede ser tan simple como detallar regiones de una imagen, donde la información de interés es conocida para ser localizada.
El conocimiento base, también puede ser un poco complejo, como una lista inter relacionada de todos los posibles defectos mayores en la inspección de un material o una base de datos de imágenes que contiene imágenes satelitales en alta definición de una región en conexión sin aplicaciones de detección de cambios.
Una vez aplicadas las etapas de visión por computadora mencionadas anteriormente, tendremos una imagen en la que veremos el brazo del simulador y la incidencia de la aguja previamente efectuada por el usuario, solo resta aplicar las ecuaciones pertinentes para calcular el ángulo que existe entre el brazo y la aguja para de este modo evaluar la punción del usuario y saber si fue correcta.
1.3 PLANTEAMIENTO DEL PROBLEMA
Para comprobar que efectivamente existe un problema con las infiltraciones intravenosas se realizaron 2 encuestas, la primera aplicada a enfermeras (os) y a estudiantes que realizan prácticas o servicio social en el HGR2/UMMA, la segunda distribuida por medio de la red social “Facebook”, el tipo de muestreo que se utilizo para realizar estas entrevistas es el muestreo sin norma16, debido a que en el hospital donde se aplicaron las encuestas los enfermeros y practicantes se encontraban en horario laborable al momento que se realizaron las encuestas, y por la misma razón de la forma de distribución de la encuesta a pacientes la contesto quien decidió hacerlo. Se muestra y explican a detalle el resultado de las mismas a continuación, y los cuestionarios de cada una de las encuestas se muestran en el anexo III del presente.
15
Fuente: MATLAB, help hough.
16 Muestreo sin norma: para decidir el tipo de muestreo a utilizar en el presente, se reviso la siguiente
bibliografía. Murray R. Spiegel. 1977. Probababilidad y estadística, Teoria y 760 problemas resueltos. Segunda Edición, New York, Editorial Mac Graw Hill. Página 155.
20
Encuesta 1
La encuesta se realizó en el Hospital Regional General 2 con UMMA que cuenta con 350 enfermeros de los cuales solo se logró encuestar a 50 de, que en cuyo caso representan el 14.28% del 100% de nuestro universo de 350 enfermeros. Al hacer la operación inversa, obtuvimos que cada enfermero que respondió la encuesta representa a 7 de los mismos.
Tomando en cuenta la gráfica 1, podemos observar que, de acuerdo a las encuestas aplicadas a los enfermero(a)s del Hospital Regional General, existe un gran número de casos en donde los practicantes, debido a que no cuentan con las herramientas o modelos similares al brazo humano, se ven obligados a realizar sus prácticas de venopunción en compañeros y objetos (naranjas, piernas de pollo, etc.)
Grafico 1: Encuesta a enfermero(a)s.
Encuesta 2
La encuesta a pacientes, se ha hecho por medio de la herramienta en línea llamada Google Docs17 (la encuesta está en la página http://goo.gl/2ySRM) apoyándonos para su difusión en una cuenta de Facebook con 426 amigos, obteniendo en total 76 respuestas, las cuales representan el 17.85% de nuestro universo de 426 elementos, y haciendo la operación inversa, obtenemos que cada persona que respondió la encuesta, representa a 5 personas.
17
http://docs.google.com
36
24 9
39
Encuestas
Considera que no recibio la practica adecuada
Lastimo pacientes
Conoce algun simulador
21
Cuando se aplica una técnica de venóclisis en seres humanos, es fácil causarle algún tipo de problema que como lo demuestran las encuestas, puede ir desde un dolor más fuerte del soportado, edemas, una infección hasta una sepsis. Esto sucede, por la indebida aplicación de la técnica usada en muchas ocasiones por los practicantes de enfermería, los cuales, antes de realizar su primera práctica en seres humanos que la mayoría de los casos la primera vez que lo hacen es con sus compañeros de clase y también son lastimados, practican la mayoría de las veces como lo demuestran las encuestas realizadas en naranjas, pelotas, u otro tipo de objeto que no es parecido en lo más mínimo a un ser humano. Debido a que no cuentan con otro tipo de materiales didácticos de precio accesible, modelados de tal forma que los acerque un poco más a la realidad.
Por tal motivo, se propone la realización de un prototipo que permitirá a los practicantes, adquirir más habilidad para cuando tengan que aplicar esta técnica. Lo cual beneficiará también a las escuelas, ya que la adquisición de material didáctico de este tipo, les permitirá capacitar de mejor forma a los alumnos, y por consecuencia, les dará mejor prestigio.
Se pretende reducir los errores que se presentan con frecuencia al efectuar una punción intravenosa y representan graves riesgos para la salud de los pacientes como:
• La colocación incorrecta de la aguja. (Se debe realizar con el Bisel hacia arriba)
• El cambio en la posición de la aguja, que implica un movimiento de retroceso que podría sacarla del lumen venoso.
• El movimiento hacia delante que atraviese completamente una vena. Figura 1.7: Colocación
incorrecta de la aguja.
Figura 1.8: Cambio de posición de la aguja.
22
• El movimiento de la aguja, que provoque que el bisel quede contra la pared de la vena, afectando la entrada de la sangre.
• El colapso de una vena.
• Formación de hematoma.
• Atravesamiento de una arteria. (Es evidente al observar sangre de un color rojo brillante).
[image:22.612.67.571.81.536.2]
Figura 1.10: Bisel contra pared de vena.
Figura 1.11: Vena colapsada por bisel.
Figura 1.12: Hematoma en brazo.
23
1.4 ALCANCE
El proyecto será dirigido principalmente a una audiencia que se encuentra en un proceso de aprendizaje. Por tal motivo tendrá un beneficio multidireccional en el sentido de que será de gran ayuda tanto para estudiantes como para profesores, así como también para los pacientes.
En este caso los profesores tendrán una herramienta que apoye la correcta aplicación del proceso de venóclisis. Logrando agilizar el aprendizaje de los estudiantes de medicina y enfermería, a través de la práctica.
Se pretende que sea un sistema fácil de utilizar para cualquier persona, para lo cual, la audiencia necesitará aprender ciertas cuestiones básicas de uso y función para sacar el mejor provecho posible. Sin embargo no se tratará de una larga capacitación. Conforme se vaya utilizando, se tornará más familiar y sencillo.
1.5 RECURSOS.
Al planificar el desarrollo del proyecto se ha pensado en la viabilidad del mismo, éste no generará gastos excesivos e innecesarios que representen una rápida caducidad o constantes inversiones y actualizaciones. Tampoco la adquisición de elementos de exagerado costo, ni complejos de instalar.
1.5.1 Análisis Costo-Beneficio.
En el siguiente cuadro se realiza un análisis de la conveniencia de contar con un modelo como el que se desarrolla.
Costo total aproximado del modelo $7,000.00
Beneficio Escuelas Públicas
No habría una recuperación monetaria inmediata, debido a que las cuotas de escuelas públicas son muy bajas, sin embargo se estará agilizando el aprendizaje y mejorando las técnicas de aplicación de intravenosas de los estudiantes.
El beneficio monetario, se verá reflejado , en caso de que los estudiantes llegaran a trabajar en dependencias de gobierno, debido a que al tener una mejor preparación, causarán menos problemas en el ambiente laboral
24 Beneficio Escuelas Particulares
Curso con duración de 60 horas: $1,000.00
En un Grupo con 15 alumnos, el ingreso total es de $15,000.00
Honorarios de dos médicos por 60 horas: $6,000.00
Inversión en material y servicios: $4,000.00
Recuperación monetaria de
$5,000.00
Inversión en el modelo:
$7,000.00 en un primer curso1
Honorarios de un médico:
$3,000.002
Inversión en material y servicios:
$4,000.00
Recuperación monetaria: $1,000.00
El prestigio de la escuela al tener material didáctico de mayor tecnología permitirá la mejor preparación de los estudiantes INVERSION EN LOS CURSOS
SUBSECUENTES
Repuesto de la fosa ante cubital:
$1,000.00
Honorarios de un médico:
$3,000.00
Inversión en material y servicios:
$4,000.00
Recuperación monetaria: $7,000.00
El prestigio de la escuela al tener material didáctico de mayor tecnología permitirá la mejor preparación de los estudiantes
1.- En un primer curso debido a que en los cursos subsecuentes, solo se hará la inversión del repuesto de la fosa ante cubital que es donde se aplicarán las inyecciones
2.- Debido a que no será necesaria la evaluación y presencia del otro médico, ya que solo será necesaria la enseñanza de la técnica y no de la evaluación, porque está la hará el prototipo
1.6 METAS.
Algunas de las cuestiones que podrán mejorar en cuanto a la aplicación de la técnica de punción intravenosa se refiere, a través del uso del sistema serán:
• Mejor capacitación del personal de salud.
• Optimización del tiempo en los procesos de enseñanza-aprendizaje, así como en la implementación de la práctica.
• Resultados en un mejor trato a los pacientes.
25
1.7 PROPUESTA DE SOLUCIÓN
Para que sea posible que aquellas personas que deseen aprender a realizar punciones intravenosas puedan hacerlo en un modelo real sin afectar a terceras personas y que al mismo tiempo se cercioren de que lo hicieron bien sin esperar a ver si causaron o no daños en el paciente, se propone realizar el modelo de un brazo con gel balístico a la altura del dorso ante cubital (flexura del codo), ya que como se ve el análisis de punción venosa es el área más común para hacer este tipo de punciones debido a que las venas son gruesas y esta área de acceso rápido.
1.8 HERRAMIENTAS DE TRABAJO
Debido a que conocemos ciertas herramientas con los que se puede hacer un tratamiento adecuado de imágenes y que se adecuan al sistema que se busca realizar en el presente, se explicaran a continuación las herramientas propuestas para desarrollar el prototipo.
1.8.1 MATLAB
MATLAB es una herramienta computacional, que se utiliza principalmente para modelado matemático ya que al ser un lenguaje de alto nivel, es capáz de manejar datos matriciales de todo tipo como imágenes.
La razón por la cual MATLAB puede considerarse como un lenguaje es debido a que ofrece características de programación similares a otros lenguajes de programación como C.
Para una aplicación como la se desarrolla en el proyecto, MATLAB es lo más recomendable, debido a que cuenta con los módulos necesarios para realizar un buen procesamiento digital de imágenes, así como con una herramienta llamada guide, con cual es posible desarrollar la interfaz grafica para el usuario, además de que es posible crear los archivos ejecutables para que sea posible abrir la aplicación en cualquier equipo de computo que cuente con sistema operativo Windows.
26 1.8.2 Gel de Balística
En este proyecto, el Gel balístico, tendrá un papel muy importante, ya que la fosa ante cubital del brazo en este modelo, será hecha con este material.
“El Gel balístico, es un material usado por especialistas en criminalística, y peritos de la policía entre otros, para imitar a la carne humana. Al estar compuesto en su mayor parte por agua, puede reproducir casi a la perfección el tejido vivo, ya sea perforándolo con armas blancas, siendo blanco de disparos, o resistiendo a grandes descargas eléctricas de alto voltaje.”18
En la mezcla hecha para obtener el gel la cual se puede ver a detalle en el anexo IV, la pectina sódica actúa como conservador, por lo cual el tiempo de vida del gel, es largo. Un mes aproximadamente, siempre y cuando, se mantenga en la debida refrigeración, ya que debido a la consistencia e gel, es susceptible a derretirse a temperatura ambiente.
18
27
CAPITULO II: DISEÑO
Como lo indica el nombre del capítulo en este, se realizara el diseño del prototipo, se definirá y explicara de forma detallada como se pretende desarrollar el prototipo, que herramientas se usaran, y se explicara porque se usaran las mismas.
2.1 REVISIÓN DE LA PROPUESTA DE ANÁLISIS.
Tras haber analizado la problemática actual en la enseñanza de esta técnica, tratando de proponer una solución se busca diseñar un prototipo de simulador, que sea de fácil uso, interactivo, pero sobre todo accesible, para que aquellas instituciones, como escuelas públicas puedan adquirirlo, y de esta manera mejorar la enseñanza de esta técnica.
2.2 DISEÑO PRELIMINAR
[image:27.612.95.468.330.615.2]En la figura 2.1 se muestra una imagen aproximada de las partes que se pretende que contenga el prototipo que se desea realizar, esta numerados y se explica a continuación cada una de las partes:
28
1. Brazo: El brazo se usara solamente para que la persona que practique la punción venosa se sienta más acercada a un brazo humano.
2. Gel de balística: El gel de balística es un material cuya densidad es muy parecía a la de la piel humana y musculo humano por lo tanto en esta parte del brazo dorso ante cubital, se usara gel de balística para que de esta forma, el estudiante tenga una idea de la sensación del musculo humano al punzarlo.
3. Aguja: La aguja será el segundo objeto principal en la toma de la imagen, ya que esta y el brazo serán los que formaran el ángulo.
4. Cámara: Mediante esta será captada la imagen de prueba con la que se va a procesar.
5. Computadora: Esta se encargara de ejecutar la aplicación que procesara la imagen.
6. Pantalla: Se usara para ver el proceso de la imagen la muestra de la misma, y para tener comunicación grafica con la computadora.
2.3 DISEÑO DETALLADO
En el Diagrama de la figura 2.2, se muestra el funcionamiento a bloques, del prototipo, comenzando con la toma de la imagen de la prueba, con la cual vamos a trabajar, luego viene la segmentación que nos servirá para facilitar la detección de la aguja ó catéter, que es la siguiente etapa. Teniendo detectada la aguja/catéter, procederemos a medir el ángulo, con el cual incide para la infiltración. Procedemos a guardar el resultado para compararlo con pruebas anteriores, y determinar si ha habido mejora.
29
Figura 2.2: Diagrama de flujo de la aplicación.
30 2.3.1 Interfaz Gráfica de Usuario (GUI)
[image:30.612.69.516.169.441.2]El diseño de la interfaz gráfica para el usuario constará de solamente una pantalla en la cual se realizará todo el procesamiento digital necesario para saber el ángulo con el que está incidiendo la aguja en el brazo, y así mismo mostrara el resultado, dicha pantalla se muestra en la figura 2.3.
Figura 2.3: Interfaz grafica de usuario.
2.3.2 Modelo del brazo
31
No obstante que el yeso es un material que se rompe con facilidad y debe ser manejado con cuidado, se tomaron muestras de este para realizar las primeras pruebas del procesado de la imagen, el modelo de yeso no fue útil, debido a que las imágenes muestran mucho ruido, y no se puede hacer una medida acertada del ángulo, en las figuras 2.5 a 2.8 se muestra el
proceso de la imagen que se realizo de las etapas
utilizadas de visión por computadora.
[image:31.612.205.437.67.243.2][image:31.612.302.520.371.543.2]
Figura 2.4: Brazo de yeso
[image:31.612.72.292.388.558.2]32
Como se puede observar en la figura 2.7 la imagen tiene gran cantidad de ruido, por lo que no se puede hacer un buen reconocimiento de objetos en la etapa de descripción que ilustra la figura 2.8, esto es debido a la superficie de la venda de yeso la cual no es lisa, y por ende reconoce un sinfín de objetos al momento de aplicar la etapa de descripción, por cual no es posible continuar con el procesado de la imagen.
[image:32.612.312.524.68.241.2]Por estas razones se procedió a buscar un modelo de fibra de vidrio, que es un material más resistente y además de tener mejor presentación a la vista, se asemeja más al del ser humano, dicho modelo se ilustra en la figura 2.9.
[image:32.612.70.275.68.232.2]Figura 2.7 Etapa de segmentación Figura 2.8 Etapa de descripción
[image:32.612.74.506.442.657.2]33
En definitiva el segundo modelo se asemeja más al diseño que se realizo previamente, por lo tanto es el que se usará para realizar las pruebas definitivas de la aplicación.
[image:33.612.305.514.171.334.2]Como se observa en las figuras 2.10 a 2.13 las imágenes procesadas de la toma de este modelo muestran menos ruido (figura 2.12) y detecta mejor los objetos, como se ilustra en la figura 2.13
[image:33.612.73.293.171.333.2]A pesar de que con el modelo de fibra de vidrio el proyecto mejoró considerablemente, nos podemos dar cuenta que dadas las características del mismo, al realizar la toma de la imagen, las condiciones de luz en el lugar donde se está utilizando el modelo antes mencionado aumentan o disminuyen; lo cual repercutirá en la calidad de la figura, es decir, el reflejo de la luz creará en dicha imagen líneas diferentes dificultando así el procedimiento de la transformada de Hough, ya que el brillo generado en la imagen será detectado como líneas.
Figura 2.12: Etapa de segmentación
Figura 2.10: Etapa de sensado Figura 2.11: Etapa de pre-procesamiento
[image:33.612.83.527.368.541.2]34
Debido a lo mencionado anteriormente fue necesario hacer modificaciones al brazo de fibra de vidrio, de tal manera que el reflejo causado por la luz sobre el brazo no fuera un impedimento para que la prueba arrojara resultados correctos.
[image:34.612.205.393.207.348.2]Las modificaciones realizadas al brazo consistieron en pintar una línea de color más obscuro a lo largo de la parte superior del mismo, con la finalidad de que éste sea detectado como un borde distinto en la toma de la imagen. El resultado será que la línea se emplee para crear el ángulo, y se formen las líneas perpendiculares con la aguja. El modelo se muestra en la figura 2.14.
35
CAPITULO III: CONSTRUCCION
El prototipo requiere de una interacción entre un usuario y el mismo a través de una computadora con una webcam motivo por el cual se deben programar una serie de instrucciones para que este cumpla con lo especificado cabe aclarar que solo se mostraran las instrucciones principales y el código completo se muestra en el anexo IV del presente; para construirlo utilizaremos el entorno de Matlab y Matlab GUIDE que como se mencionó anteriormente, para el caso que nos ocupa resultan ser herramientas muy útiles para el tratamiento de las imágenes.
3.1 CONSTRUCCIÓN DEL CÓDIGO
A lo largo de este tema se muestran y explican las instrucciones principales que se usaron para el procesado digital de las imágenes, con las cuales se logra obtener el ángulo de incidencia de la aguja.
A = imread('c:\intra\imok2.jpg','jpg'); B= getdata(vid,2);
Con estas instrucciones se logra obtener una imagen de un directorio especificado, en donde la aplicación desarrollada guardara una toma del modelo de la imagen sin que exista aun la aguja, esto con el propósito de que sea restada con la imagen que se obtendrá cuando él practicante realice la prueba, la es que asignada a otra matriz, y así se obtenga una mejor detección de la aguja para el proceso que es necesario aplicar después.
I(x,y)=0.299*A(x,y,1)+0.587*A(x,y,2)+0.114*A(x,y,3);
Para hacer el cambio de la imagen obtenida a escala de grises se da esta instrucción, que asigna a una nueva matriz la imagen que a las 3 capaz principales de RGB las multiplica por valores de escala de grises, esto se realiza para las 2 imágenes obtenidas de la cámara y del directorio.
R(X,Y,1)= (E(X,Y,1)- I(X,Y,1));
Esta instrucción se utiliza para realizar la resta de las imágenes previamente descrita.
mask=[-3,-3,-3;-3,0,5;-3,5,5]; C=conv2(R,mask);
Con estas instrucciones se realiza la detección de bordes que pertenece a la etapa de segmentación, se realiza por medio de la matriz de Kirsch a 315°.
if imD(i,j)>10
36 else
nuevaI(i,j) = 255; end
end
Estas instrucciones pertenece también y se encarga de binarizar la imagen, esto quiere decir que a partir de un valor umbral que para este caso es 10, se pondrán a negro los pixeles que rebasen este valor, y a 1 en caso contrario.
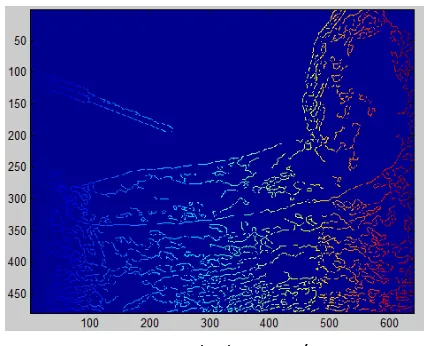
[H,theta,rho] = hough(D); peaks = houghpeaks(H,2);
lines = houghlines(imB,theta,rho,peaks);
Estas instrucciones son las encargadas de realizar el procedimiento de la transformada de hough, de la cual el objetivo principal es detectar las 2 líneas perpendiculares en las que se medirá el ángulo, las cuales pertenecen a la aguja (primera línea que se muestra en la figura 3.1 de arriba debajo de izquierda a derecha) y al brazo.
theta = acos(dot(v1,v2)/(norm(v1)*norm(v2))) angle_degrees = (theta * (180/pi))
[image:36.612.161.483.310.552.2]Esta serie de instrucciones es solamente para la obtención de ángulo, y se realiza mediante el producto punto de las líneas obtenidas en la imagen anterior y asignadas cada una a vectores, divida entre el producto de las normas de los mismos vectores; en la segunda línea debido a que matlab arroja el resultado en radianes, se realiza la conversión a grados.
37
Debido a que con las 3 primeras etapas del sistema de visión por computadora se logro medir el ángulo deseado, no se continuo con la cuarta etapa que incluía los métodos de detección y descripción de objetos a pesar de que fue utilizado en pruebas, en el desarrollo del programa ya no fue necesario utilizarlas.
[image:37.612.71.544.177.471.2]3.2 DESARROLLO DE LA GUI (INTERFAZ GRAFICA DE USUARIO)
Figura 3.2: Vista de la pantalla de la aplicación
Explicación del funcionamiento del Simulador.
g1.- Iniciar Prueba es un pushbutton que da inicio con todo el proceso de la aplicación lo primero que hace es inicializar la webcam y mostrar el preview de lo que se está captando en tiempo real.
function InitCam_Callback(hObject, eventdata, handles) vid = videoinput('winvideo', 1, 'RGB24_320x240'); src = getselectedsource(vid);
vid = videoinput('winvideo',1, 'RGB24_320x240'); preview(vid);
2.- Se toma una fotografía después de 5 segundos y se guarda en una variable.
B=getsnapshot(vid); pause(5);
1
2
3
38
3.- Se detiene el preview de la webcam y se cierra todos los procesos de la misma.
stoppreview(vid); closepreview(vid); stop(vid);
delete(vid); clear vid;
4.- Se realiza el proceso descrito en la construcción del código.
5.- La imagen final se muestra en la parte central de la GUI junto con las líneas de color verde que detectan los objetos de nuestro interés.
axes(handles.ImagenProcesada); imshow(B);
El resultado del ángulo obtenido por las dos líneas formada se muestra en la caja de texto “Resultado” por medio de la siguiente línea:
39
CAPITULO IV: IMPLEMENTACIÓN
A lo largo de este capítulo se darán a conocer los requerimientos necesarios para la implementación de la aplicación y el modelo del brazo desarrollados en los capítulos anteriores, para el optimo funcionamiento de los mismos:
4.1 PREPARACION PARA LA IMPLEMENTACIÓN
Debido a las características del sistema desarrollado, no es necesaria una computadora de elevados recursos, tanto en software como en hardware.
Para que funcione la cámara web utilizada para captar las imágenes la cual es de Microsoft modelo LifeCam VX-3000, de alta definición, se usaran las mismas características que son necesarias para que se ejecute la aplicación, las cuales son:
Procesador: Intel (Pentium IV o superior, Celeron, Xenon, Core) o AMD (Athlon, Opteron o Sempron)
SO: Windows XP SP2 o 3, Windows 2000 (con Service Pack 1 o R2), Windows Vista SP1 y Windows Server 2008.
RAM: mínima: 512 RAM. Muy recomendable: 1.024 MB Espacio en disco: 1 GB
Tarjeta de sonido: tarjeta de sonido compatible con Windows y altavoces
4.2 IMPLEMENTACION Y PRUEBAS
Una vez instalado el software en una computadora se procedió a realizar las pruebas del prototipo, las cuales resultaron favorables. El sistema tiene un buen funcionamiento debido a que nosotros (totalmente inexpertos en la aplicación de inyecciones intravenosas) realizamos pruebas de infiltración en el brazo, las cuales arrojaron datos poco favorables en cuanto a la técnica utilizada para inyectar. También se solicitó la ayuda de una enfermera profesional y con experiencia para ser sometida a tal prueba y el resultado fue que los datos obtenidos indicaron que utilizó una técnica correcta.
Por lo tanto, pudimos comprobar la efectividad del prototipo y las considerables mejoras a partir de la aplicación de nuestro análisis de los errores y dificultades que pudimos contrarrestar.
A continuación se muestra una tabla en la cual, se organizan los resultados de esta prueba, en la que es posible observar el desempeño de cada uno de nosotros al aplicar una inyección, incluyendo también el de la enfermera.
40
INTENTOS Aarón Diana Evelio Enfermera
1 25.64° 23.15° 22.06° 28.53°
2 23.45° 27.53° 24.25° 29.03°
3 31.25° 29.12° 32.50° 30.98°
Con lo anterior se demuestra que el brazo es útil en la práctica de la punción venosa, y que puede ayudar a la mejora de dicha técnica antes de ser realizada en seres humanos, lo que optimizará el proceso de aprendizaje sin la necesidad del sufrimiento de aquellas personas con las que experimentan los aprendices.
También se llevó el brazo al mismo hospital donde se realizaron con anterioridad las encuestas a las enfermeras (HGR C/UMAA 02) para que ellas mismas lo probaran. Aunque fueron varias de estas enfermeras que realizaron la prueba sólo se muestran los resultados de 5 de ellas (una muestra significativa para fines de análisis), los cuales fueron favorables debido a su experiencia.
41
Enfermera Resultado (grados) Opinión
1 31.50 Buena
2 29.52 Buena
3 30.53 Excelente
4 29.06 Buena
5 30.61 Regular
P1 28.56 Muy buena
P2 25.63 Muy buena
P3 26.06 Excelente
42
CONCLUSIONES
Con base en lo aprendido a lo largo de la construcción de este proyecto, podemos concluir que el uso de la visión por computadora resulta ser muy útil por ser una herramienta precisa; debido a que excluye el factor de error humano. Ya que en un principio, se sustituye el ojo humano por una cámara, eliminando en primera instancia el error de paralelaje, que es un error sistemático personal que sucede cuando alguien no mira perpendicularmente la escala del instrumento que se está empleando.
De no tomarse en cuenta, implicaría mucho más tiempo a una persona, hacer el procesamiento de las imágenes junto con una medición exacta, sin olvidar que necesitaría tener por lo menos conocimientos sobre el uso de herramientas de medición, además de la técnica de venopunción siendo esta ultima el plato fuerte de este proyecto ya que el emplear un simulador que tenga las características adecuadas con las cuales el practicante se pueda sentir más en confianza de poder realizar una incisión sin el miedo de cometer errores que puedan repercutir en lesiones a terceros y que en el mayor de los casos exista una demanda, y así con ayuda del mismo el practicante poco a poco mejore su habilidad de esta técnica y por ende con esto se verá beneficiado tanto el practicante como la escuela ya que ahorrara en recursos monetarios para la capacitación para el practicante.
Es bien sabido el hecho de que cada vez más se utiliza la asistencia de herramientas basadas en tecnología para ayudar a las personas que se dedican al sector salud, dichas herramientas van desde una computadora, hasta alguna que les asista durante la práctica de una cirugía.
Por tal motivo lo aprendido en este proyecto trasciende más allá de una aplicación médica ya que el campo que abarca la visión por computadora y la ingeniería como tal es bastante amplio y en estos existen situaciones reales que acarrean problemas reales para los que ya estamos mejor preparados para darle solución a estos y brindar nuevas propuestas para evitar los mismos.
Como se demuestra con el proyecto es posible implementar herramientas para mejorar y facilitar el aprendizaje de los estudiantes de enfermería, sin lastimar a terceros.
Para que el proyecto funcionara adecuadamente fue necesario observar, analizar, corregir y hasta replantear el diseño del brazo a pesar de que la visión por computadora es muy exacta, ya que también es muy susceptible a cualquier tipo de cambio en la detección de la imagen.
Como se muestra en el capítulo 4, el prototipo es bien aceptado por el personal de enfermería, tanto estudiantes como profesionales que reconocen su utilidad.
43 BIBLIOGRAFÍA
La Rocca J. C. y Otto S. E. (1994). Terapia Intravenosa. Segunda edición, Madrid, editorial Mosby / Doyma Libros.
L. Enrique Sucar y Giovani Gómez. Visión Computacional. PDF
Rafael C. Gonzalez y Richard E. Woods. 2002. Digital Image Processing. Segunda edición. New Jersey, editorial Prentice Hall.
44
ANEXOS
I. GLOSARIO DE TERMINOS
Venóclisis: Inyección de inserción lenta que puede contener medicamentos, suero o cualquier otra sustancia que el paciente en cuestión o tratamiento requiera, en una vena.
Venopunción: Acción de pinchar o picar una vena.
Edema: es la hinchazón blanda de una parte del cuerpo que se produce como consecuencia de la acumulación de líquido en los tejidos del cuerpo.
Sepsis: Al síndrome de respuesta inflamatoria sistémica (SRIS) provocado por una infección grave, altamente sospechada o documentada y caracterizada por lesión generalizada del endotelio vascular (el endotelio se encuentra tapizando el interior de los vasos sanguíneos).
Espacio extracelular: Espacio que está dividido en intravascular (plasmático) y extravascular (intersticial), con una proporción del peso en agua de 1:3. Si bien la composición de solutos difiere en ambos espacios, tienen similares concentraciones de cationes y de aniones y la misma osmoralidad.
Equimosis: Lesión resultante de una contusión sin solución de continuidad de la piel, que produce una extravasación de sangre en el tejido celular subcutáneo por rotura de los capilares, así como dolor por desgarro de los filetes nerviosos
Trombosis del vaso: Formación de un trombo (Agregación de plaquetas, fibrina, factores de coagulación y elementos celulares de la sangre en el interior de una vena o arteria, que a veces produce oclusión de la luz vascular.) en el interior de las venas del sistema profundo de la extremidad, que determina la aparición de la tríada de dolor, tumefacción e impotencia funcional.
Canalización: Es una técnica invasiva que permite disponer de una vía permanente de acceso al árbol vascular del paciente.
HidroelectrolÍtico: Relativo al agua y a los electrólitos y a su equilibrio en el organismo.
Parenteral: Se dice de la forma de administrar alimento u otras sustancias evitando el tubo digestivo.
45
II. DIAGRAMA DE LA METODOLOGÍA LAGS (LEOPOLDO ALBERTO GALINDO
46 III. ENCUESTAS
INSTITUTO POLITECNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA ZACATENCO
ESPECIALIDAD EN COMPUTACION
1.- ¿En qué practicabas tu técnica de punción intravenosa?
2.- ¿Consideras que esa práctica es suficiente para no causarle dolor al primer paciente real?
( SI ) ( NO )
3.-¿Conoces algún tipo de simulador que ayude a los practicantes a mejorar su técnica?
( SI ) ( NO )
4.- En tus inicios, ¿lastimaste a algún paciente por falta de práctica, y cómo fue? *(OPCIONAL)*
( SI ) ( NO ) _____________________________________________________
5.- ¿Qué opinas de un simulador como éste?
Nombre:________________________________________________________________________
Centro de Trabajo:_______________________________________ Puesto:__________________
48 IV. PREPARACIÓN DE GEL DE BALÍSTICA
INGREDIENTES:
250 ml. de agua hirviendo.
2 Cucharadas de Grenetina sin sabor. 2 Cucharadas de Pectina sódica.
FORMA DE PREPARACIÓN:
o Se calienta el agua, hasta llevarla al punto de ebullición.
o Se agrega la Grenetina, y se agita hasta que desaparezcan los grumos. o Se agrega la Pectina hasta que no queden grumos.
o Se continúa agitando, al mismo tiempo que se calienta la mezcla hasta que
quede una mezcla homogénea libre de grumos.
o Se vierte la mezcla en molde.
49 V. CÓDIGO DE PROGRAMACION
function varargout = Gui(varargin) gui_Singleton = 1;
gui_State = struct('gui_Name', mfilename, ... 'gui_Singleton', gui_Singleton, ...
'gui_OpeningFcn', @Gui_OpeningFcn, ... 'gui_OutputFcn', @Gui_OutputFcn, ... 'gui_LayoutFcn', [] , ...
'gui_Callback', []); if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1}); end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:}); else
gui_mainfcn(gui_State, varargin{:}); end
function Gui_OpeningFcn(hObject,eventdata, handles, varargin) handles.output = hObject;
handles.rgb = []; handles.noback = []; guidata(hObject, handles);
if strcmp(get(hObject,'Visible'),'off') try
handles.vidobj = videoinput('winvideo'); start(handles.vidobj);
guidata(hObject, handles);
vidRes = get(handles.vidobj, 'VideoResolution'); nBands = get(handles.vidobj, 'NumberOfBands'); preview(handles.vidobj,hImage);
catch end end
handles.output = hObject; guidata(hObject, handles);
function varargout = Gui_OutputFcn(hObject, eventdata, handles) varargout{1} = handles.output;
function Webcam_CreateFcn(hObject, eventdata, handles) function InitCam_Callback(hObject, eventdata, handles) vid = videoinput('winvideo', 1, 'RGB24_320x240'); src = getselectedsource(vid);
vid = videoinput('winvideo',1, 'RGB24_320x240'); B=getsnapshot(vid);
pause(5); preview(vid);
A= imread('c:\braz.jpg','jpg'); [m n L]=size(A);
I = zeros(m,n); for x=1: m for y=1: n
50
end
[m n L]=size(B); E = zeros(m,n); for x=1: m for y=1: n
E(x,y)=0.299*B(x,y,1)+0.587*B(x,y,2)+0.114*B(x,y,3); end
end
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% restar imagenes
R=zeros(m,n); for X=1:m for Y=1:n
R(X,Y,1)= (E(X,Y,1)- I(X,Y,1)); end end R=uint8(R); C=zeros(m,n); mask=[-3,-3,-3;-3,0,5;-3,5,5]; C=conv2(R,mask); C=uint8(C); imD=double(C); [f,c]=size(imD); nuevaI=zeros(f,c); for i=1:f
for j=1:c if imD(i,j)>10 nuevaI(i,j) = 0; else
nuevaI(i,j) = 255; end
end end
imB = uint8(nuevaI); ee= strel ('line', 1, 1); c=imdilate (imB, ee); f=c;
f=255-c;
D=bwmorph(f,'erode'); [H,theta,rho] = hough(D); peaks = houghpeaks(H,3);
lines = houghlines(imB,theta,rho,peaks); figure,
imshow(D) hold on
cont=0;
51 y1 = lines(k).point1(2);
x2 = lines(k).point2(1); y2 = lines(k).point2(2); if k==1
v1=[x1 x2],[y1 y2]; end
if k==2
v2=[x1 x2],[y1 y2]; end
if k==3
v3=[x1 x2],[y1 y2]; end
if k==4
v4=[x1 x2],[y1 y2]; end
plot([x1 x2],[y1 y2],'Color','g','LineWidth', 2) end
a=lines(3) b=lines(4)
theta0 = acos(dot(v1,v2)/(norm(v1)*norm(v2))); theta1 = acos(dot(v3,v4)/(norm(v3)*norm(v4))); theta2 = acos(dot(v1,v4)/(norm(v1)*norm(v4))); theta3 = acos(dot(v1,v3)/(norm(v1)*norm(v3))); theta4 = acos(dot(v2,v3)/(norm(v2)*norm(v3))); theta5 = acos(dot(v2,v4)/(norm(v2)*norm(v4))); angle_degrees0 = (theta0 * (180/pi));
angle_degrees1 = (theta1 * (180/pi)); angle_degrees2 = (theta2 * (180/pi)); angle_degrees3 = (theta3 * (180/pi)); angle_degrees4 = (theta4 * (180/pi)); angle_degrees5 = (theta5 * (180/pi));
if theta0 <20 || theta0>90 ang=angle_degrees0 elseif theta1<20 || theta1>90 ang=angle_degrees1
elseif theta2<20 || theta2>90 ang=angle_degrees2
elseif theta3<20 || theta3>90 ang=angle_degrees3
elseif theta4<20 || theta4>90 ang=angle_degrees4
elseif theta5<20 || theta5>90 ang=angle_degrees5 end end end end end end