I
NSTITUTO
P
OLITÉCNICO
N
ACIONAL
E
SCUELA
S
UPERIOR DE
I
NGENIERÍA
M
ECÁNICA Y
E
LÉCTRICA
U
NIDAD
Z
ACATENCO
D
ISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE GRABADO PARAPCB
UTILIZANDO LÁSER DE DIODO AZULT
É
S
I
S
Q
UE PARA OBTENER EL TÍTULO DEI
NGENIERO ENC
ONTROL YA
UTOMATIZACIÓNP
R
E
S
E
N
T
A
N
L
ÓPEZA
COSTAS
ANTIAGOO
LIVARESA
RCEK
EVINT
AVIRAD
ÍAZM
IGUELA
SESORES:
I
NG.
J
OSÉÁ
NGELM
EJÍAD
OMÍNGUEZD
R.
A
LEXANDREM
ICHTCHENKOINSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELECTRICA
UNIDAD PROFESIONAL "ADOLFO LÓPEZ MATEOS"
TEMA DE TESIS
QUE PARA OBTENER EL TITULO DE INGENIERO EN CONTROL Y AUTOMATIZACIÓN POR LA OPCIÓN DE TITULACIÓN TESIS COLECTIVA Y EXAMEN ORAL INDIVIDUAL DEBERA(N) DESARROLLAR C. SANTIAGO LÓPEZ ACOSTA C. KEVIN OLIVARES ARCE C. MIGUEL TA VIRA DÍAZ "DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE GRABADO PARA PCB UTILIZANDO LÁSER DE DIODO AZUL"
IMPLEMENTAR EL LÁSER DE DIODO PARA GRABADO DE PCB y ASÍ EVITAR PROCESOS RUDIMENTARIOS EN ' LA ELABORACIÓN DE CIRCUITOS IMPRESOS, AHORRANDO CON ELLO TIEMPO Y ESFUERZO, ADEMÁS DE APLICAR LOS CONOCIMIENTOS ADQUIRIDOS EN EL TÓPICO SELECTO LLAMADO "TÉCNICAS DE APLICACIÓN DEL LÁSER EN LA MANUFACTURA" ASÍ COMO LOS CONOCIEMIENTOS DE LAS ASIGNATURAS DEL PLAN DE ESTUDIOS VIGENTE DE LA CARRERA. セ@ GENERALIDADES. MÉXICO D. F., A 27 DE SEPTIEMBRE DE 2013. DR. ALEXANDRE MICHTCHENKO セ@ MARCO TEÓRICO. セ@ DESARROLLO Y CONSTRUCCIÓN. セ@ DESARROLLO DE LA PROGRAMACIÓN. セ@ COTIZACIÓN, CONCLUSIONES Y PROPUESTAS DE MEJORA.
e
Q
\
,.,tNU¡f"h
fA.
セN@ セ|N@ \\",005 AtE."".-.
ャ セ セ@ セ C@ セ セ@6.,¡ R GHセ@ セ@ DRA:. BLANCA
MkRIT
Aochoセ セセZZᄀ@
gセ@
JEFA DEL DEPARTAMENTO ACADEMICO ,:'9セ@i
ÍNDICE
ÍNDICE ... i
ÍNDICE DE FIGURAS... iv
ÍNDICE DE TABLAS... viii
CAPITULO 1. GENERALIDADES. ... 1
1.1 Antecedentes. ... 2
1.2 Planteamiento Del Problema. ... 4
1.3 Objetivo General. ... 4
1.4 Objetivos Particulares. ... 4
1.5 Justificación. ... 5
CAPÍTULO 2. MARCO TEÓRICO. ... 7
2.1 Introducción A Los Láseres De Diodo. ... 8
2.2 Fotoluminiscencia. ... 8
2.3 El Proceso En Un Láser De Semiconductor. ... 11
2.4 Emisión Espontánea Y Emisión Estimulada. ... 13
2.5 Propiedades Básicas Del Láser. ... 15
2.6 La Construcción De Un Diodo Láser. ... 16
2.7 Curva I-V (Corriente - Voltaje) De Un Diodo Láser... 18
2.8 Circuitos De Activación Para Diodo Laser (Drivers). ... 19
2.9 Microcontroladores. ... 21
2.10 Microcontroladores Pic. ... 23
2.11 Generalidades Acerca De Matlab. ... 27
2.12 Circuitos Impresos. ... 30
ii
CAPÍTULO 3. DESARROLLO Y CONSTRUCCIÓN. ... 34
3.1 El Driver Del Láser. ... 36
3.2 Láser ... 42
3.3 Mesa De Coordenadas. ... 50
3.4 Cicuito de Control ... 68
CAPÍTULO 4. DESARROLLO DE LA PROGRAMACIÓN ... 70
4.1 Desarrollo ... 71
4.2 El Compilador ... 75
4.3 Instalación De Drivers Adicionales ... 83
4.4 Driver Para Puerto Virtual En Proteus ... 85
4.5 Conexión Virtual A Pc Mediante Proteus... 86
4.6 Instalación De Software Y Prueba Con Hyperterminal ... 94
4.7 Representación De Imágenes En Matlab ... 102
4.8 Leer Y Escribir Imágenes En Matlab ... 103
4.9 Preparando Matlab Para El Procesamiento ... 104
4.10 Diseño De Pcb A Imagen ... 106
4.11 Procesando La Imagen ... 108
4.12 Envío De Información A Través De Puerto Serie Con Matlab ... 110
CAPÍTULO 5. COTIZACIÓN CONCLUSIONES Y PROPUESTAS DE MEJORA ... 112
5.1 Cotización. ... 113
5.2 Conclusiones ... 114
5.3 Propuestas De Mejora: ... 115
Referencias... 117
Anexos ... 120
Anexo A: Diodo Láser Nbd7412t ... 120
iii
Anexo C: L293c ... 123
Anexo D: L7805 ... 126
Anexo E: Irf610 ... 128
Anexo F: Ir2110 ... 130
Anexo G: Pic18f4550 ... 133
Anexo H: Código de Procesamiento de Imagen en MATLAB. ... 136
Anexo I: Código de Propuesta de activación de Puerto Serie en MATLAB ... 137
Anexo J: Código de programación del Microcontrolador PIC para la gestión del sistema de grabado. ... 138
iv
ÍNDICE DE FIGURAS
Figura 2.1 Momentos de la irradiación. [6] ... 9
Figura 2.2 Niveles energéticos. [6] ... 10
Figura 2.3 Esquema de un diodo láser. [7] ... 11
Figura 2.4 Bandas de energía de una unión p-n cuando se le aplica un voltaje positivo. .... 12
Figura 2.5 Estructura básica de un láser de diodo. ... 17
Figura 2.6 Perfil de la radiación láser emitida por un diodo láser simple. ... 17
Figura 2.7 Potencia de emisión de un diodo láser en función de la corriente aplicada.[10] 18 Figura 2.8 Circuito de activación para un diodo láser. [12] ... 20
Figura 2.9 Circuito de modulación para un diodo láser. [12] ... 21
Figura 2.10 Visualización del puerto virtual en el Administrador de Dispositivos de Windows ... 32
Figura 2.11 Configuración interna del PLL de la familia PIC18F [14] ... 33
Figura 3.1 Circuito RLC ... 37
Figura 3.2 Circuito Buck con valores propuestos, donde D1 representa el láser... 39
Figura 3.3 Simulación del Circuito Buck ... 39
Figura 3.4 Armado del driver completo ... 40
Figura 3.5: Conexión típica del IR2110 para dos MOSFET [15] ... 41
Figura 3.6 Simulación habiendo añadido el generador de funciones ... 41
Figura 3.7 Visualización del funcionamiento del driver ante una señal cuadrada. b)Parámetros asignados ... 42
Figura 3.8 Circuito propuesto integrando el IR2210 y el IRF610 ... 42
Figura 3.9 a) Láser de diodo NBD7412T b) Lente incluido para colimar la luz ... 44
Figura 3.10 Dispersión de la luz en un láser de diodo ... 45
Figura 3.11 Tratando la luz ... 45
Figura 3.12 Se muestra el punto en donde es posible vaporizar. ... 46
Figura 3.13: Haz de luz apuntado hacia un vaso de vidrio con agua. ... 46
v
Figura 3.15 Hembra del apuntador ... 48
Figura 3.16 Elementos ensamblados a) Lente b)Láser de diodo ... 48
Figura 3.17 Equipo láser operando a 500mA sin lente ... 49
Figura 3.18 Equipo láser operando a 500mA con lente ... 49
Figura 3.19 Motorreductor ... 51
Figura . Esparrago de ½ UNC ... 53
Figura . : Pla a do de se o tará el husillo, o u arre o de / e el centro ... 53
Figura 3.22 Rodamiento No. 608 ... 54
Figura 3.23 Cople para unión entre el husillo y el motorreductor ... 56
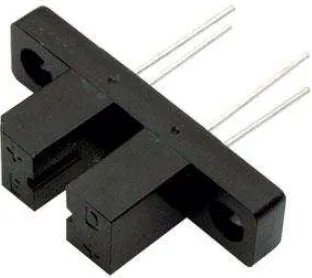
Figura 3.24 Optointerruptor ... 57
Figura 3.25 Encoder ciego (sin barrenos) ... 57
Figura 3.26 Acrílico de 2mm de espesor ... 58
Figura 3.27 Husillo con baleros y encoder montados ... 58
Figura 3.28 Optointerruptor acoplado al husillo ... 59
Figura 3.29 Motorreductor y husillo acoplados. ... 59
Figura 3.30 Soporte con rodamiento. ... 60
Figura 3.31 Fijación de motor. ... 60
Figura 3.32 Vista superior de la fijación del motor. ... 61
Figura 3.33 Ensamblado final de un eje ... 62
Figura 3.34 Vista isométrica de la ubicación de la posición HOME... 63
Figura 3.35 Vista superior de la posición HOME ... 63
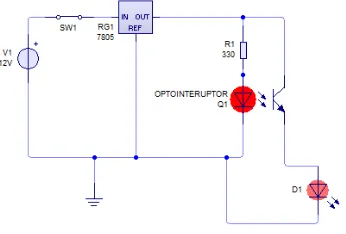
Figura 3.36 Circuito propuesto para el encoder, teniendo un cero lógico. ... 64
Figura 3.37 Circuito implementado ... 65
Figura 3.38 Circuito que representa la conexión de los 2 encoder, y en ambos se muestra que se envía un cero lógico al microcontrolador. ... 66
Figura 3.39 Los encoders de ambos ejes se encuentran enviando un 1 lógico al microcontrolador. ... 66
Figura 3.40 Disposición de terminales del L293C ... 67
Figura 3.41 Conexión típica del L293C ... 67
vi
Figura 3.43 Disposición de los pines del PIC18F4550 [14] ... 69
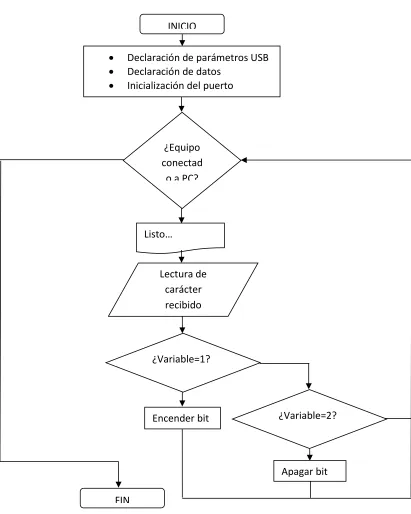
Figura 4.1 Diagrama de flujo de la programación del Microcontrolador PIC ... 72
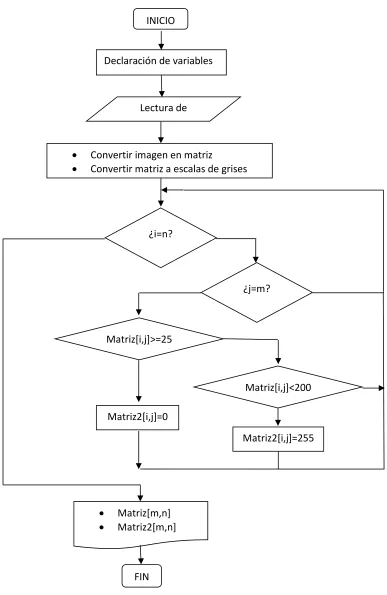
Figura 4.2 Diagrama de flujo de la programación en MATLAB. ... 74
Figura 4.3 Ícono de acceso a CCS Compiler. ... 75
Figura 4.4 Entorno de trabajo de CCS Compiler ... 76
Figura 4.5 Generando un nuevo proyecto de programación PIC ... 77
Figura 4.6 Asignando un nombre y ubicación al proyecto. ... 77
Figura 4.7 Mostrando ubicación de las opciones del proyecto. ... 78
Figura 4.8 Opciones que se ofrecen para modificar el proyecto ... 79
Figura 4.9 Designando al programa el PIC a usar ... 80
Figura 4.10 Corroborando que las rutas de los archivos a usar se encuentren incluidas en el proyecto ... 81
Figura 4.11 Ubicación de las carpetas que se deben incluir en el proyecto ... 81
Figura 4.12 Desplegando la opción de compilar. ... 82
Figura 4.13 Compilación del programa completa, generando ficheros para el PIC. ... 83
Figura 4.14 Archivo MCHPCDC.inf ... 83
Figura 4.15 Instalando el fichero en la PC ... 84
Figura 4.16 Archivo MCHFSUSB_Setup.exe ... 84
Figura . Ve ta a del i stalador do de soli ita A eptar Tér i os de Uso ... 85
Figura 4.18 Ruta de acceso para instalar controlador de USB Virtual ... 85
Figura 4.19 Instalación de drivers completa ... 86
Figura 4.20 Ubicación del ISIS Proteus ... 87
Figura 4.21 Entorno de trabajo de ISIS ... 87
Figura 4.22 Iniciando la librería ... 88
Figura 4.23 Desplegando el componente y características ... 89
Figura 4.24 Conector virtual USBCONN ... 90
Figura 4.25 Lista de componentes añadidos desde la librería ... 90
Figura 4.26 Circuito de prueba ... 91
vii
Figura 4.28 Seleccionando el fichero a cargar en el PIC ... 93
Figura 4.29 Fichero usb.hex añadido al PIC ... 93
Figura 4.30 Botones de animación de Proteus ... 94
Figura 4.31 Primera vez que se conecta el puerto a la PC ... 95
Figura 4.32 Asistente para instalación de hardware nuevo ... 95
Figura 4.33 Instalación en progreso ... 96
Figura 4.34 Advertencia de controlador obsoleto ... 96
Figura 4.35 Instalación de hardware exitosa y completa.... 97
Figura 4.36 Puerto virtual registrado como dispositivo activo en el Administrador de dispositivos de Microsoft Windows. ... 97
Figura 4.37 Iniciando HyperTerminal ... 99
Figura 4.38 Seleccionando puerto de conexión ... 99
Figura 4.39 Configuración de los parámetros de conexión serie ... 100
Figura 4.40 HyperTerminal listo, interactuando con Proteus... 101
Figura 4.41 Envío de dato exitoso, LED conectado en RB3 encendido ... 102
Figura 4.42 Creando un nuevo M-File ... 105
Figura 4.43 Nuevo M-File listo para ser escrito ... 105
Figura 4.44 Programa escrito en MATLAB ... 106
Figura 4.45 Diseñando la PCB en el programa ... 107
Figura 4.46 a) Guardando el diseño como imagen con PDFCreator b) Diseño en formato .jpg ... 107
Figura 4.47 Botón de PLAY en MATLAB para la ejecución del programa ... 108
Figura 4.48 Visualización de la imagen convertida en matriz en escala de grises ... 109
Figura 4.49 Visualización de imágenes a) Imagen original b)Resultado de la simulación 110 Figura 4.50 M-File para la activación del puerto serie ... 111
viii
ÍNDICE DE TABLAS
Tabla 3.1 Características del NBD7412T ... 44
Tabla 3.2 Rosca exterior, ángulo de flanco 60 ° ... 52
Tabla 3.3 Rodamiento de la serie 600, NSK ... 55
Tabla 5.1 Cotización de acuerdo al material propuesto para el desarrollo del sistema de grabado
CAPITULO 1. GENERALIDADES.
En este capítulo se define y plantea el problema a resolver con el presente
proyecto se tesis, así como el objetivo general y objetivos particulares, además de
2
1.1 Antecedentes.
El grabado de materiales fue una de las primeras expresiones artísticas del ser
humano y se remonta al grabado en cuevas (arte parietal) y huesos en el periodo
paleolítico. El duplicado de imágenes grabadas se presentó con los sumerios hace 3000
años quienes grabaron sellos cilíndricos de piedra. El grabado de metal comenzó siendo
una técnica decorativa en el siglo V AC y era realizada con cinceles y martillos, o a mano
usando una herramienta filosa y resistente que producía líneas más finas, siendo un
método popular en Grecia en los siglos IV y III AC. En Egipto y Babilonia se usaron sellos
de madera para marcar tabiques. Los romanos grababan madera y metal para ser usados
como negativos sobre vasijas y otros utensilios. Los japoneses hicieron las primeras
impresiones autentificadas, grabando en bloques de madera tablas budistas en el siglo
VIII. En los primeros cuatro siglos de nuestra era fue cuando se comenzó a realizar
grabado en cristal. [1]
El trabajo artístico sobre madera y otros materiales tuvo un nuevo auge en el siglo
XV en Europa y era principalmente usado para decoraciones religiosas. En el siglo XVI se
difundió con más fuerza el uso del grabado de cristal usando martillo y cincel con punta de
diamante. Posteriormente, el grabado en madera y metales se usó en el desarrollo de la
imprenta y para hacer portadas y dibujos en libros. Se desarrolló al mismo tiempo el
grabado con chorro de arena (sand blast) que consiste en poner una máscara sobre el
material y dejar caer un chorro de arena hasta lograr la profundidad deseada de grabado,
obteniendo resultados altamente estéticos en metales, cristal y madera. Hasta este punto
en la historia, todos los métodos de grabado estaban basados en la acción de golpear o
raspar el material con herramientas hechas de algún material más duro que el que se
deseaba grabar. [2]
Los métodos fotográficos de grabado (fotogalvanografía), comenzaron a
3 uso de sustancias químicas que reaccionaban al contacto con la luz para afectar las zonas
deseadas del grabado, siendo usado principalmente en metales para fines de impresión.
Los métodos electrolíticos de grabado (electro erosión) se presentaron a mediados
del siglo XIX con Walker como principal recopilador de información, dichos métodos se
basaban en la inmersión de una placa de cobre cubierta por alguna solución metálica en
un electrolito y el uso de una corriente eléctrica para fijar los materiales.
El rotograbado fue usado por primera vez a finales del siglo XIX por Klic siendo el
primer método de grabado hecho con máquina y fue igualmente usado para imprentas. A
partir del siglo XIX se comenzó a usar el ataque con ácido en metales, piedras y vidrio. [3]
En el siglo XX se desarrollaron mejoras en la mayoría de métodos convencionales,
siendo auxiliados por el uso de máquinas y control eléctrico. Con el desarrollo de nuevos
materiales industriales, como plásticos y nuevas aleaciones, algunos métodos
convencionales comenzaron a presentar deficiencias en el trabajo de los mismos.
El uso de láser para realizar trabajo sobre materiales comenzó en la década de los
70s y cambió la manera en que varios procesos se realizaban, además permitió el grabado
sobre algunos de los materiales industriales más difíciles de trabajar como el titanio.
Se han desarrollado no solo mejoras en la técnica de grabado, sino que también se
han producido materiales especiales para ser trabajados con láser que dan resultados
asombrosos en contraste y precisión.
Actualmente, el grabado con láser no se usa únicamente en la industria para
realizar marcaje de piezas y decoración de las mismas de forma rápida y precisa, sino que
también es utilizado por artistas y diseñadores gráficos para dar vida a sus obras.
Hoy en día existe un gran número de compañías a nivel mundial enfocadas en el
desarrollo de sistemas integrales de grabado con láser, ofreciendo una amplia gama de
posibilidades para la industria, tanto en precio como en características de operación,
4
1.2 Planteamiento Del Problema.
El problema que se aborda en este trabajo es la integración de elementos
mecánicos, electrónicos, ópticos y computacionales en un sistema de grabado con láser
que permita reducir el tiempo de elaboración de un circuito impreso.
Dado al tiempo que se emplea con los métodos tradicionales, lo que se busca es
reducir dicho tiempo y de esta manera optimizar recursos que faciliten su elaboración,
logrando así así eficacia y reducción de lapsos en el proceso de diseño.
1.3 Objetivo General.
El objetivo general de la tesis es el de diseñar e implementar un sistema capaz de
grabar PCB (acrónimo en inglés de "Printed Circuit Board") usando una luz láser como
herramienta de trabajo y así evitar procesos rudimentarios en la elaboración de circuitos
impresos, ahorrando con ello tiempo y esfuerzo, además de aplicar los conocimientos
adquiridos en el tópico selecto llamado "Técnicas de Aplicación del Láser en la
Manufactura" así como los conocimientos de las asignaturas del plan de estudios vigente
de la carrera de Ingeniería en Control y Automatización
1.4 Objetivos Particulares.
1.- Seleccionar el circuito de control y el láser de diodo azul que permitan el correcto
funcionamiento del sistema de grabado para PCB (acrónimo en inglés de "Printed Circuit
Board").
2.- Investigar y conocer la importancia de utilizar el láser en industrias de diversos rubros
5 3.- Investigar y analizar las diferentes técnicas de grabado que existen en la actualidad
4.- Desarrollar el código de programación necesario utilizando un PIC 18F4550
5.- Diseñar el prototipo de sistema de grabado de tarjetas PCB
1.5 Justificación.
Dentro de las materias teórico - prácticas incluidas en el plan de estudios vigente
de la carrera de Ingeniería en Control y Automatización, se contempla la realización de
diversos circuitos electrónicos ya sea para prácticas, proyectos o participaciones en
diversos eventos por parte de los alumnos.
En gran parte de los casos en las actividades antes mencionadas, es necesario
elaborar circuitos impresos o PCB (acrónimo en inglés de "Printed Circuit Board") para dar
mayor presentación a un trabajo.
Como se mencionó en párrafos anteriores el proceso convencional de elaboración
de circuitos impresos, específicamente las actividades que permiten plasmar el circuito
eléctrico en una tablilla fenólica, representan una gran pérdida de tiempo. Es por ello que
se optó por desarrollar un sistema que permita reducir tiempo en la elaboración de
circuitos impresos utilizando una herramienta muy importante durante los últimos años:
el láser.
El grabado con láser ha venido a sustituir métodos convencionales por su
versatilidad, precisión, y velocidad en el trabajo, entre otros factores, dando como
6 La gran facilidad que proporciona el uso de un sistema automático controlado por
una computadora, que si bien no es exclusivo del grabado con láser, permite que
cualquier persona con conocimientos básicos de computación desarrolle trabajos
rápidamente, ya que su uso es como el de una impresora común.
Con todo esto se justifica plenamente el desarrollo de este tipo de tecnología en el
7
CAPÍTULO 2. MARCO TEÓRICO.
En el presente capítulo se da a conocer la teoría que permita realizar los
experimentos correspondientes previos al diseño del prototipo.
Se habla de manera general de los láseres, drivers y electrónica que permita la
correcta selección del equipo y componentes que se adecúen a las necesidades del
8
2.1 Introducción A Los Láseres De Diodo.
La palabra Laser es un acrónimo de Light Amplification by stimulated emission of
adiatio , ue e español uie e de i a plifi a ió de luz po e isió estimulada de
adia ió . [ ]
El primer diodo láser operacional consistió en un cristal de arseniuro de galio
(GaAs), impurificado para formar una unión pn, y un potencial directo aplicado. Se eligió el
arseniuro de galio en lugar de silicio debido a su banda directa. En materiales de banda
directa, los electrones de conducción pueden perder energía directamente por emisión de
fotones. En materiales de banda indirecta, los electrones deben perder primero el exceso
en cantidad de movimiento antes de emitir un fotón. Por consiguiente, los materiales de
banda directa son más eficientes para la producción de luz. [5]
2.2 Fotoluminiscencia.
En el año de 1916 se estableció teóricamente que con la ayuda de la luz es posible
llevar ciertos átomos a un estado de excitación y que estos empiecen a irradiar ondas
luminosas con otra frecuencia.[5]
La luz observada irradiando del diodo laser son cuantos de radiación
electromagnética llamados fotones, el desprendimiento de fotones de un átomo excitado
se provoca mediante la acción de un cuanto de energía aplicado hacia dicho átomo, como
resultado de esta interacción el átomo pasa a su estado base emitiendo un fotón que
tiene las mismas características de dirección y de fase que el fotón inicial, dicho proceso
tiene lugar dentro de una cavidad con dos espejos en paralelo donde existe un medio
9 Brevemente, si el átomo absorbe un fotón, la energía del átomo se incrementa,
uno de sus electrones pasa de la órbita normal (llamada también estado base o tierra) en
la cual poseía una energía E0, a una órbita de energía superior E2. Aquí el estado de
excitación es inestable, a diferencia del estado de estabilidad del nivel E0. Pero este
electrón pasa fácilmente del nivel E2 a otro menos inestable, al nivel E1, y es entonces
cuando el átomo emite un fotón. Si se toma en cuenta que en la realidad este proceso se
produce no en un átomo solo sino en un inmenso volumen de ellos, el efecto final del
proceso es un flujo de energía electromagnética constituido por la suma de los fotones
emitidos.
La irradiación se prolonga hasta que todos los electrones abandonen el nivel E2, o
sea, hasta que bajen del nivel E2 al nivel E1:
Figura 2.1 Momentos de la irradiación. [6]
Energía / fotón = E2 – E1 (2.1)
La excitación obligará a los electrones a pasar de nuevo al nivel E2 y con ello se
producirá un pulso de luz. La frecuencia del rayo de luz emitido depende, también, de la
anterior diferencia de energías, puesto que:
10 Donde E2 es la energía del nivel energético superior, E1 es la energía del nivel
energético inferior, ʋ es frecuencia y h = 6.6262 x 10 -54 conocida como la constante de
Planck
En un material semiconductor "puro", la estructura de las bandas y la brecha de
energía están determinadas por el propio material. Añadiendo otro material con
portadores de carga, aparecen niveles de energía adicionales dentro de la brecha ( ver
Figura 2.1).
Si la impureza contiene más electrones que el propio material semiconductor puro,
los portadores de carga añadidos son negativos (electrones), y el material se denomina
"semiconductor de tipo n". En este tipo de materiales aparecen niveles energéticos
adicionales muy cercanos a la banda de conducción, con lo que es suficiente con un
aporte pequeño de energía para hacerlos saltar a la banda de conducción, de modo que
tenemos más portadores de carga libres para conducir la electricidad.
Si la impureza contiene menos electrones que el material semiconductor, los
niveles energéticos extras aparecen cerca de la banda de valencia. Los electrones de la
banda de valencia pueden saltar a estos niveles fácilmente, dejando atrás "agujeros
positivos". Este tipo de material se denomina "semiconductor de tipo p".
En la figura 2.2 se describe la influencia de la adición de impurezas en la anchura
de las bandas de energía.
11
2.3 El Proceso En Un Láser De Semiconductor
.
Cuando se une un semiconductor tipo "p" a otro tipo "n", se obtiene una "unión
p-n". Esta unión p-n conduce la electricidad en una dirección preferente (hacia adelante).
Este aumento direccional de la conductividad es un mecanismo común en todos los
diodos y transistores utilizados en la electrónica. Y es la base del proceso láser que tiene
lugar entre las bandas de energía de la unión.
La Figura 2.3 muestra el esquema de un diodo láser con los materiales P y N como
se indica anteriormente.
Figura 2.3 Esquema de un diodo láser. [7]
El nivel máximo de energía ocupado por electrones se denomina Nivel de
Fermi. Cuando se conecta el polo positivo de un voltaje a la cara p de la unión p-n , y el
negativo a la cara n , se establece un flujo de corriente a través de la unión p-n . Esta
conexión se denomina Voltaje dirigido hacia adelante o positivo. Si se conecta con la
12 hacia atrás o negativo; éste causa un aumento de la barrera de potencial existente entre
las partes p y n , con lo que evita el paso de la corriente a través de la unión.
Cuando se aplica un voltaje a través de una unión p-n , la población de las bandas
de energía cambia.
El voltaje puede ser aplicado de dos formas o configuraciones posibles:
a) Voltaje positivo o hacia adelante - significa que el polo negativo del voltaje es
aplicado a la cara "n" de la unión , y el polo positivo a la cara "p" , como se
muestra en la figura 3:
Figura 2.4 Bandas de energía de una unión p-n cuando se le aplica un voltaje positivo.
El voltaje hacia adelante o positivo crea portadores extra en la unión, reduciendo la
barrera de potencial, y origina la inyección de portadores de carga, a través de la unión, al
otro lado.
Cuando un electrón de la banda de conducción en el lado "n" es inyectado a través
de la unión a un " agujero " vacío en la banda de valencia del lado "p", tiene lugar un
13 En los diodos láser, nuestro interés se concentra en los casos específicos en que la
energía es liberada en forma de radiación láser. Se produce un fuerte aumento de la
conductividad cuando el voltaje positivo es aproximadamente igual a la brecha de energía
del semiconductor.
b) Voltaje negativo o hacia atrás - causa un aumento de la barrera de potencial,
disminuyendo la posibilidad de que los electrones salten al otro lado.
Aumentando el voltaje negativo a valores altos (décimas de volt), se puede
obtener un colapso del voltaje de la unión.
2.4 Emisión Espontánea Y Emisión Estimulada.
El diodo láser se utiliza igual que un diodo LED, es decir, como un diodo p-n
polarizado directamente. Sin embargo, aunque su estructura parece similar a la de un LED
en lo que respecta a electrones y huecos, no lo es en lo referente a los fotones.
Como en el caso del LED, inyectamos electrones en la zona activa polarizando
directamente el diodo láser. Para bajos niveles de inyección, estos electrones y huecos se
recombinan de forma radiante mediante el proceso de emisión espontánea, emitiendo
fotones. La emisión estimulada permite obtener una alta pureza espectral de la señal,
fotones coherentes y una alta velocidad de respuesta. La diferencia fundamental es pues
la emisión espontánea en el LED y estimulada en el diodo láser.
Supongamos un electrón con un vector de onda k y un hueco con un vector de
onda k en las bandas de conducción y de valencia del semiconductor respectivamente. Si
no hay fotones en el semiconductor, el electrón y el hueco se recombinan emitiendo un
14
Si existen fotones en el semiconductor y éstos tienen la misma energía hω ue la
diferencia de energía entre electrón y hueco, además de la emisión espontánea se
produce otro tipo de proceso de emisión llamado emisión estimulada. El proceso de
emisión estimulada es proporcional a la concentración de fotones (de fotones con la
energía adecuada para causar la transición electrón-hueco). Los fotones emitidos tendrán
la misma fase que los fotones incidentes causantes de la emisión, es decir, tendrán la
misma energía y vector de onda.
La frecuencia de generación de fotones de forma estimulada viene dictada por la
velocidad de recombinación en este tipo de proceso: [8]
Wstem(hω) = Wem(hω) * nph(hω) (2.3)
Donde nph(hω es la o e t a ió de foto es Wem es la velocidad de
recombinación en el proceso de emisión espontánea. En el LED, cuando los fotones son
emitidos de forma espontánea, éstos son perdidos bien por reabsorción o bien porque
simplemente abandonan la estructura. Por tanto, nph(hω) permanece en un valor muy
pequeño y no puede iniciarse un proceso de emisión estimulada.
Vamos a considerar ahora la posibilidad de que los fotones sean emitidos de forma
espontánea y que seamos capaces de diseñar una cavidad óptica tal que los fotones que
posean una energía bien definida sean confinados de forma selectiva en la estructura del
semiconductor. Esto aumentaría nph(hω) y a su vez la emisión estimulada. El resultado
sería una señal de salida con un espectro de emisión muy estrecho y que podría ser
15
2.5 Propiedades Básicas Del Láser.
La luz es básicamente energía, y, como toda clase de energía, puede ser
transformada en calor; de aquí que pueda ser utilizada como herramienta industrial.
Las tres propiedades básicas de un rayo láser son:
a) Coherencia: Relaciona la fase entre un frente de onda emitido y el que le sigue;
esta coherencia es temporal y espacial. La luz emitida por una maquina láser es
coherente por naturaleza.
b) Monocromático: La luz blanca está compuesta de todos los colores básicos,
esto limita su uso industrial, puesto que presenta aberraciones como
dispersión, etc. La luz de u laser, en cambio, es por naturaleza monocromática,
es decir, de un solo color.
c) Polarización: La luz de una fuente incandescente no es polarizada; para lograr
polarizarla se requieren de dos filtros cuando menos para obtener el haz de luz
cortado. La luz láser es polarizada dada la necesidad de tener las ventanas de
Brewster que forman parte de toda máquina láser.
A continuación se menciona la ley de Brewster para la polarización de la luz.
Pa a o te e luz o pola iza ió se e plea el fe ó e o de la efle ió . Cua do
una superficie refleja un haz de luz, se encuentra que la componente de E (vector de
16 De hecho, a un ángulo particular de incidencia sobre un dieléctrico (el ángulo de
Brewster) el haz reflejado consta completamente de la luz cuyo vector eléctrico es
paralelo a la superficie. Resulta que el ángulo de polarización (ó ángulo de Brewster) es tal
que los rayos reflejados y refractados se encuentran entre sí a un ángulo de 90°.
Para encontrar la relación entre el ángulo de polarización y el índice de refracción
de la sustancia reflectora, se aplica la ley de Snell. Se tiene:
µ = sen i / sen r (2.4)
Donde i es el ángulo de incidencia y r el ángulo de refracción. En el ángulo de
pola iza ió , i = Өp, a pa ti de lo a te io se tie e ue:
Өp + 90° r = 180° (2.5)
Por lo tanto:
sen (r) = os Өp (2.6)
Resultando que
µ = ta Өp (2.7) Esta relación se llama ley de Brewster.
2.6 La Construcción De Un Diodo Láser
.
Las capas de los materiales semiconductores están dispuestas de modo que se crea
una región activa en la unión p-n, y en la que aparecen fotones como consecuencia del
17 permite aplicar un voltaje externo al láser. Las caras del semiconductor cristalino están
cortadas de forma que se comportan como espejos de la cavidad óptica resonante.
Figura 2.5 Estructura básica de un láser de diodo.
La Figura 2.6 describe la forma en que la radiación láser electromagnética es
emitida para un láser simple de diodo. La radiación láser tiene forma rectangular y se
difunde a diferentes ángulos en dos direcciones.
18
2.7 Curva I-V (Corriente - Voltaje) De Un Diodo Láser.
Si la condición requerida para la acción láser de inversión de población no existe, los fotones serán emitidos por emisión espontánea. Los fotones serán emitidos aleatoriamente en todas las direcciones, siendo ésta la base de los LED diodo emisor de luz .
La inversión de población sólo se consigue con un bombeo externo. Aumentando la intensidad de la corriente aplicada a la unión pn, se alcanza el umbral de corriente necesario para conseguir la inversión de población.[9]
En la figura 2.7 se muestra un ejemplo de la potencia emitida por un diodo láser en función de la corriente aplicada. Se aprecia enseguida que la pendiente correspondiente a la acción láser es mucho mayor que la correspondiente a un LED.
Figura 2.7 Potencia de emisión de un diodo láser en función de la corriente aplicada.[10]
19 Cuando el umbral de corriente es bajo, se disipa menos energía en forma de calor, con lo que la eficiencia del láser aumenta. En la práctica, el parámetro importante es la densidad de corriente, medida en A/cm2, de la sección transversal de la unión pn.
2.8 Circuitos De Activación Para Diodo Laser (Drivers).
Al diseñar circuitos de activación para diodos láser debe tomarse en cuenta la baja
resistencia del diodo cuando se opera con un voltaje directo a través de él. Aquí la
implicación es que los diodos deben alimentares con una fuente de corriente, es decir, con
una fuente que tenga alta resistencia interna. Tales condiciones pueden lograrse mediante
la sustitución del resistor de carga en un circuito de emisor común completamente
estabilizado por el diodo láser (figura 2.8). [11] La corriente constante se obtiene al
sustituir un diodo Zener en lugar de la resistencia, normalmente entre la base y tierra. La
corriente a través del diodo láser está dada por:
ID = (VZ -VBE) / RE (2.8)
En donde Vz es el voltaje de ruptura del diodo Zener, VBE es el voltaje base-emisor y
RE es la resistencia del emisor. Una disposición alternativa es colocar el diodo en el emisor
del circuito. Debido a que la corriente del emisor es determinada por el voltaje de la base,
y por ello el voltaje Zener, esta disposición ayuda a asegurarse en contra de variaciones
20 Figura 2.8 Circuito de activación para un diodo láser. [12]
El circuito de emisor común completamente estabilizado también representa un
punto de inicio idóneo en caso de que el diodo vaya a ser activado en el modo por pulsos
con la señal de modulación acoplada capacitivamente a la base. El punto de operación es
determinado por la resistencia de emisor y por la cadena de polarización del
potenciómetro, R1 y R2 (figura 2.9) y debe elegirse alrededor del punto medio de la
característica de salida potencia-corriente. En caso de que no se disponga de esta
información, el punto de operación debe elegirse a la mitad de la corriente umbral y la
21 Figura 2.9 Circuito de modulación para un diodo láser. [12]
2.9 Microcontroladores.
U i o o t olado a e iado μC, UC o MCU es u i uito i teg ado
programable, capaz de ejecutar las órdenes grabadas en su memoria. Está compuesto de
varios bloques funcionales, los cuales cumplen una tarea específica. Un microcontrolador
incluye en su interior las tres principales unidades funcionales de una computadora:
unidad central de procesamiento, memoria y periféricos de entrada/salida.
Algunos microcontroladores pueden utilizar palabras de cuatro bits y funcionan a
velocidad de reloj con frecuencias tan bajas como 4 kHz, con un consumo de baja potencia
(mW o microwatts). Por lo general, tendrá la capacidad para mantener la funcionalidad a
la espera de un evento como pulsar un botón o de otra interrupción, el consumo de
22 nanowatts, lo que hace que muchos de ellos muy adecuados para aplicaciones con batería
de larga duración.
Los microcontroladores son diseñados para reducir el costo económico y el
consumo de energía de un sistema en particular. Por eso el tamaño de la unidad central
de procesamiento, la cantidad de memoria y los periféricos incluidos dependerán de la
aplicación. Representan la inmensa mayoría de los chips de computadoras vendidos,
sobre un 50% son controladores "simples" y el restante corresponde a DSP más
especializados. Pueden encontrarse en casi cualquier dispositivo electrónico como
automóviles, lavadoras, hornos microondas, teléfonos, etc.
Un microcontrolador típico tendrá un generador de reloj integrado y una pequeña
cantidad de memoria de acceso aleatorio y/o ROM/EPROM/EEPROM/flash, con lo que
para hacerlo funcionar todo lo que se necesita son unos pocos programas de control y un
cristal de sincronización. Los microcontroladores disponen generalmente también de una
gran variedad de dispositivos de entrada/salida, como convertidor analógico digital,
temporizadores, UARTs y buses de interfaz serie especializados, como I2C y CAN.
Frecuentemente, estos dispositivos integrados pueden ser controlados por instrucciones
de procesadores especializados. Los modernos microcontroladores frecuentemente
incluyen un lenguaje de programación integrado, como el lenguaje de programación
BASIC que se utiliza bastante con este propósito.
Un microcontrolador, posee los siguientesperiféricos:
Entradas y salidas: También conocidos como puertos de E/S, generalmente
agrupadas en puertos de 8 bits de longitud, permiten leer datos del exterior o
23 trabajo con dispositivos simples como relés, LED, o cualquier otra cosa que se
le ocurra al programador.
Temporizadores y Contadores: Son circuitos sincrónicos para el conteo de los
pulsos que llegan a su poder para conseguir la entrada de reloj. Si la fuente de
un gran conteo es el oscilador interno del microcontrolador es común que no
tengan un pin asociado, y en este caso trabajan como temporizadores. Por otra
parte, cuando la fuente de conteo es externa, entonces tienen asociado un pin
configurado como entrada, este es el modo contador.
Conversor analógico-digital: Como es muy frecuente el trabajo con señales
analógicas, éstas deben ser convertidas a digital y por ello muchos
microcontroladores incorporan un conversor analógico-digital, el cual se utiliza
para tomar datos de varias entradas diferentes que se seleccionan mediante un
multiplexor.
Modulador de Ancho de Pulsos: Los PWM (Pulse Width Modulator) son
periféricos muy útiles sobre todo para el control de motores, sin embargo hay
un grupo de aplicaciones que pueden realizarse con este periférico, dentro de
las cuales podemos citar: inversión DC/AC para UPS, conversión digital
analógica D/A, control regulado de luz (dimming) entre otras.
2.10 Microcontroladores Pic.
Los PIC son una familia de microcontroladores tipo RISC fabricados por Microchip
Technology Inc. y derivados del PIC1650, originalmente desarrollado por la división de
24 El PIC original se diseñó para ser usado con la nueva CPU de 16 bits CP16000.
Siendo en general una buena CPU, ésta tenía malas prestaciones de entrada y salida, y el
PIC de 8 bits se desarrolló en 1975 para mejorar el rendimiento del sistema quitando peso
de E/S a la CPU. El PIC utilizaba microcódigo simple almacenado en ROM para realizar
estas tareas; y aunque el término no se usaba por aquel entonces, se trata de un diseño
RISC que ejecuta una instrucción cada 4 ciclos del oscilador.
En 1985 la división de microelectrónica de General Instrument se separa como
compañía independiente que es incorporada como filial (el 14 de diciembre de 1987
cambia el nombre a Microchip Technology y en 1989 es adquirida por un grupo de
inversores) y el nuevo propietario canceló casi todos los desarrollos, que para esas fechas
la mayoría estaban obsoletos. El PIC, sin embargo, se mejoró con EPROM para conseguir
un controlador de canal programable. Hoy en día multitud de PICs vienen con varios
periféricos incluidos (módulos de comunicación serie, UARTs, núcleos de control de
motores, etc.) y con memoria de programa desde 512 a 32.000 palabras (una palabra
corresponde a una instrucción en lenguaje ensamblador, y puede ser de 12, 14, 16 ó 32
bits, dependiendo de la familia específica de PICmicro).
El PIC usa un juego de instrucciones tipo RISC, cuyo número puede variar desde 35
para PICs de gama baja a 70 para los de gama alta. Las instrucciones se clasifican entre las
que realizan operaciones entre el acumulador y una constante, entre el acumulador y una
posición de memoria, instrucciones de condicionamiento y de salto/retorno,
implementación de interrupciones y una para pasar a modo de bajo consumo llamada
sleep.
Microchip proporciona un entorno de desarrollo freeware llamado MPLAB que
incluye un simulador software y un ensamblador. Otras empresas desarrollan
25 alta ("C18" para la serie F18 y "C30" para los dsPICs) y se puede descargar una edición
para estudiantes del C18 que inhabilita algunas opciones después de un tiempo de
evaluación.
La arquitectura del PIC es sumamente minimalista. Está caracterizada por las
siguientes prestaciones:
Área de código y de datos separadas (Arquitectura Harvard).
Un reducido número de instrucciones de longitud fija.
Implementa segmentación.
Un solo acumulador (W), cuyo uso (como operador de origen) es implícito (no
está especificado en la instrucción).
Todas las posiciones de la RAM funcionan como registros de origen y/o de
destino de operaciones matemáticas y otras funciones.1
Una pila de hardware para almacenar instrucciones de regreso de funciones.
Una relativamente pequeña cantidad de espacio de datos direccionable
(típicamente, 256 bytes), extensible a través de manipulación de bancos de
memoria.
El espacio de datos está relacionado con el CPU, puertos, y los registros de los
periféricos.
El contador de programa está también relacionado dentro del espacio de
datos, y es posible escribir en él (permitiendo saltos indirectos).
A diferencia de la mayoría de otros CPU, no hay distinción entre los espacios de
memoria y los espacios de registros, ya que la RAM cumple ambas funciones, y esta es
26 Características:
Los PICs actuales vienen con una amplia gama de mejoras hardware incorporados:
Núcleos de CPU de 8/16 bits con Arquitectura Harvard modificada
Memoria Flash y ROM disponible desde 256 bytes a 256 kilobytes
Puertos de E/S (típicamente 0 a 5,5 voltios)
Temporizadores de 8/16/32 bits
Tecnología Nanowatt para modos de control de energía
Periféricos serie síncronos y asíncronos: USART, AUSART, EUSART
Conversores analógico/digital de 8-10-12 bits
Comparadores de tensión
Módulos de captura y comparación PWM
Controladores LCD
Periférico MSSP para comunicaciones I²C, SPI, y I²S
Memoria EEPROM interna con duración de hasta un millón de ciclos de
lectura/escritura
Periféricos de control de motores
Soporte de interfaz USB
Soporte de controlador Ethernet
Soporte de controlador CAN
Soporte de controlador LIN
27
2.11 Generalidades Acerca De Matlab.
MATLAB es un lenguaje de alto nivel y un entorno interactivo para el cálculo
numérico, la visualización y la programación. Mediante MATLAB, es posible analizar datos,
desarrollar algoritmos y crear modelos o aplicaciones. El lenguaje, las herramientas y las
funciones matemáticas incorporadas permiten explorar diversos enfoques y llegar a una
solución antes que con hojas de cálculo o lenguajes de programación tradicionales, como
pueden ser C/C++ o Java.
MATLAB se puede utilizar en una gran variedad de aplicaciones, tales como
procesamiento de señales y comunicaciones, procesamiento de imagen y vídeo, sistemas
de control, pruebas y medidas, finanzas computacionales y biología computacional. Más
de un millón de ingenieros y científicos de la industria y la educación utilizan MATLAB, el
lenguaje del cálculo técnico.
Es importante resaltar los siguientes toolboxes, ya que serán necesarios para la
realización del proyecto.
Image Processing Toolbox
Proporciona un conjunto completo de los algoritmos de referencia estándar,
funciones y aplicaciones de procesamiento de imágenes, análisis, visualización y desarrollo
de algoritmos. Puede llevar a cabo la mejora de imagen, deblurring de imagen, detección
de accidentes, reducción de ruido, segmentación de imágenes, transformaciones
geométricas y registro de imágenes. Muchas funciones del Toolbox son multiproceso para
28 Image Processing Toolbox soporta un conjunto diverso de tipos de imágenes,
incluyendo alto rango dinámico, resolución gigapixel, incrustado perfil ICC y tomográfico.
Las funciones de visualización le permiten explorar una imagen, examinar una región de
píxeles, ajustar el contraste, crear contornos o histogramas y manipular regiones de
interés (ROI). Con los algoritmos del Toolbox se puede restaurar imágenes degradadas,
detectar y medir características, analizar formas y texturas, y ajustar el balance de color.
[18]
Las herramientas principales que ofrece Image Processing Toolobox son:
• Importación y exportación de imágenes
• Visualización y exploración de imágenes
• Preprocesamiento y postprocesamiento de imágenes
• Análisis de imágenes
• Transformación geométrica y registro de imagen
29
Instrument Control Toolbox
Muchos dispositivos e instrumentos se conectan a un ordenador a través de una
interfaz en serie. Cualquier dispositivo o instrumento que tiene una interfaz serial puede
comunicarse directamente desde MATLAB y Simulink con Instrument Control Toolbox.
El toolbox proporciona las herramientas que le permiten comunicarse, configurar y
transferir datos hacia o desde su dispositivo serie sin necesidad de escribir código. Puede
generar código MATLAB para su dispositivo serie que se puede reutilizar después de
comunicarse con el dispositivo o el desarrollo de aplicaciones gráficas. También puede
comunicarse con el dispositivo serie utilizando scripts de MATLAB o crear sus propios
controladores de software y encapsular los comandos en serie de bajo nivel en comandos
de alto nivel que son más fáciles de acceder. [19]
Instrument Control Toolbox le permite conectar MATLAB directamente a
instrumentos tales como osciloscopios, generadores de funciones, analizadores de
señales, fuentes de alimentación y los instrumentos analíticos. El toolbox se conecta con
sus instrumentos a través de los controladores de instrumentos tales como IVI y VXIplug &
play, o vía SCPI comandos basados en texto a través de protocolos de comunicación más
utilizados, como GPIB, VISA, TCP / IP y UDP. También puede controlar y adquirir datos
desde el equipo de prueba sin necesidad de escribir código. [19]
Con Instrument Control Toolbox, puede generar datos en MATLAB para enviar a un
instrumento, o leer datos en MATLAB para el análisis y visualización. Puede automatizar
las pruebas, verificar diseños de hardware, y construir sistemas de prueba basados en
estándares AXIe LXI, PXI. [19]
Para la comunicación a distancia con otros equipos y dispositivos de MATLAB, el
toolbox proporciona soporte integrado para TCP / IP, UDP, I2C, SPI y protocolos de serie
30
2.12 Circuitos Impresos.
En electrónica, un circuito impreso, tarjeta de circuito impreso o PCB (del inglés
printed circuit board), es una superficie constituida por caminos o pistas de material
conductor laminadas sobre una base no conductora. El circuito impreso se utiliza para
conectar eléctricamente - a través de los caminos conductores, y sostener mecánicamente
- por medio de la base, un conjunto de componentes electrónicos. Los caminos son
generalmente de cobre mientras que la base se fabrica de resinas de fibra de vidrio
reforzada (la más conocida es la FR4), cerámica, plástico, teflón o polímeros como la
baquelita.
La producción de los PCB y el montaje de los componentes puede ser
automatizada. Esto permite que en ambientes de producción en masa, sean más
económicos y confiables que otras alternativas de montaje- por ejemplo el punto a punto.
En otros contextos, como la construcción de prototipos basada en ensamble manual, la
escasa capacidad de modificación una vez construidos y el esfuerzo que implica la
soldadura de los componentes2 hace que los PCB no sean una alternativa óptima. Antes
que los circuitos impresos (y por un tiempo después de su invención), la conexión punto a
punto era la más usada. Para prototipos, o producción de pequeñas cantidades, el método
i e ap puede considerarse más eficiente.
Originalmente, cada componente electrónico tenía pines de cobre o latón de
varios milímetros de longitud, y el circuito impreso tenía orificios taladrados para cada pin
del componente. Los pines de los componentes atravesaban los orificios y eran soldados a
las pistas del circuito impreso. Este método de ensamblaje es llamado through-hole ("a
través del orificio", por su nombre en inglés). En 1949, Moe Abramson y Stanilus F. Danko,
31 donde las pines de los componentes eran insertadas en una lámina de cobre con el patrón
de interconexión, y luego eran soldadas. Con el desarrollo de la laminación de tarjetas y
técnicas de grabados, este concepto evolucionó en el proceso estándar de fabricación de
circuitos impresos usado en la actualidad. La soldadura se puede hacer automáticamente
pasando la tarjeta sobre un flujo de soldadura derretida, en una máquina de soldadura
por ola.
La mayoría de los circuitos impresos están compuestos por entre una a dieciséis
capas conductoras, separadas y soportadas por capas de material aislante (sustrato)
laminadas (pegadas) entre sí.
Las capas pueden conectarse a través de orificios, llamados vías. Los orificios
pueden ser electorecubiertos, o se pueden utilizar pequeños remaches. Los circuitos
impresos de alta densidad pueden tener vías ciegas, que son visibles en sólo un lado de la
tarjeta, o vías enterradas, que no son visibles en el exterior de la tarjeta.
2.13 La Comunicación.
El USB CDC (Communication Device Class) es una clase de dispositivos compuestos
de USB. La clase puede incluir más de una interfaz, como una interfaz de control
personalizada, interfaz de datos, audio o almacenamiento masivo. [13]
El CDC es usado principalmente para módems, pero también para ISDN, máquinas
de faz y aplicaciones de telefonía para realizar regularmente llamadas de voz. [13]
Esta clase de dispositivos es también para enlazar dispositivos de red conectados a
una tarjeta de red, la cual provee una interfaz para transmitir Ethernet o ATMframes en
32 Esta clase puede ser usada para equipo industrial como maquinaria CNC para
permitir actualizar de controladores y robots con interfaz RS-232 y permitir que el
software siga siendo compartible. [13]
El dispositivo se conecta a una línea de comunicaciones RS-232 y el sistema
operativo en el lado USB hace que el dispositivo USB aparece como un puerto RS-232
tradicional. Los fabricantes de chips como FTDI, Microchip y Atmel proporcionan
facilidades para que sea fácil el desarrollo de dispositivos RS-232 USB.
Los dispositivos de esta clase, también se aplican en los sistemas integrados tales
como los teléfonos móviles de manera que un teléfono puede ser utilizado como un
puerto de módem, fax o de red. Las interfaces de datos se utilizan generalmente para
realizar la transferencia de datos mayor.
Para poder usar el CDC en un microcontrolador PIC son necesarios ciertos
requerimientos:
Instalar un driver con el fin de que el Firmware del PIC sea reconocido por
Windows como un dispositivo Serie estándar y sea registrado como un
puerto COM Virtual. Dicho driver es provisto por Microchip.
33 La frecuencia de oscilación necesaria para el USB 2.0 es de 48 Mhz aunque a nivel
hardware se está usando un cristal de cuarzo de 20 Mhz. Para alcanzar dicha frecuencia es
necesario hacer uso del módulo PLL interno del PIC. Para ello se indica fuse HSPLL. El
módulo PLL requiere una oscilación de entrada de 4 Mhz se utilizar el divisor 1:5 indicado
con el fuse PLL5 para obtener los 20:5 = 4 Mhz requeridos.
34
CAPÍTULO 3. DESARROLLO Y CONSTRUCCIÓN.
En este capítulo se habla de las consideraciones generales que se tomaron en
cuenta para hacer el sistema de grabado.
El sistema cuenta con 5 etapas, las cuales son:
El driver del láser.
El láser.
La mesa de coordenadas.
Circuito de control.
35 El diagrama general del sistema de grabado queda de la siguiente manera:
- El primer bloque representa el driver que se diseñó para manejar el
láser de diodo azul.
- El segundo bloque representa el diodo láser seleccionado para lograr el
propósito.
- Seguidamente, la etapa mecánica representada por la mesa de
coordenadas.
- Como cuarta etapa, el PIC representa el circuito de control para
gestionar la comunicación entre el prototipo y la PC.
- Finalmente, el último bloque representa el software utilizado para el
diseño de circuitos y la manipulación de la PCB.
Retomando los pasos 3 y 4 del planteamiento del problema, el sólo hecho
de utilizar plancha casera para adherir las pistas del circuito previamente diseñado
en la placa, toma un tiempo considerable, por lo que se busca evitar este proceso
36 La solución propuesta es cubrir en su totalidad con pintura en aerosol la
cara de la tablilla fenólica que contiene el cobre para posteriormente remover el
sobrante con el sistema de grabado.
3.1 El Driver Del Láser.
En general, para gestionar la potencia óptica de salida del diodo láser, se hace en
fu ió de su o ie te. ‘egula e te e iste d i e s e el e ado pa a ie to tipo de
diodos láser en los cuales se entrega una potencia óptica predefinida, pero son potencias
de no más de 1000mW y de tipo ON-OFF porque su aplicación más frecuente es de
apuntador.
Esto presenta una desventaja hacia el tiempo de vida útil del láser. El encenderlo a
su capacidad máxima representa una caída de corriente y de tensión muy elevada, lo que
hace que con el tiempo su potencia óptica se vea disminuida.
Por ello, se armó un driver que será explicado a continuación. Este driver tiene 2
objetivos: el primero es obtener las características deseadas para que el láser opere a su
potencia óptica máxima (1500mW,) por lo que se requiere una corriente de al menos 1.2
A. El segundo es poder gestionar el encendido y apagado del láser, es decir, hacer pasar de
la e isió espo ta ea a la e isió esti ulada de u odo ás sua e .
El láser será alimentado y gestionado por medio de un convertidor CD-CD tipo
37 Mediante un circuito RLC, se puede calcular los parámetros adecuados que
permitan obtener un encendido suave y de esta manera alcanzar un punto máximo en un
tiempo deseado en el diodo láser.
En un convertidor Buck, generalmente se sustituye el switch por algún interruptor
semiconductor. Se ha decidido usar el IRF610, ya que este es un MOSFET de 200V con
capacidad de 2 A, y también tiene una velocidad rápida de conmutación, sin mencionar
que la corriente se puede gestionar con una Modulación de Ancho de Pulso (PWM).
Para ello, se propone el siguiente circuito:
Figura 3.1 Circuito RLC
Los parámetros deseados es que sea alimentado por una fuente de 12V, con una
corriente de salida de 1.2 A. La caída de tensión del láser es de 5V, la caída de tensión del
diodo es de 0.7V, y la caída de tensión del MOSFET es de 0.3V. La gestión de este será a
través de un PWM de 1 KHz.
Esto quiere decir que se obtendrá una señal de 1ms, obteniendo un tiempo de
pulso alto de 500µs y otro de pulso bajo de 500µs.
38 (3.1) (3.2) (3.3)
Para calcular la capacitancia del circuito Buck, es necesario tomar en consideración
la tensión de rizo. Está e p esada o o ΔVo, o siste e el i emento y decremento de
la señal entre la conmutación del interruptor. Entre menor sea el rizo, mayor será la
capacitancia.
Proponiendo un rizo de 0.2V:
(3.4) (3.5)
39
Figura 3.2 Circuito Buck con valores propuestos, donde D1 representa el láser
A continuación se muestra la simulación del circuito Buck.
Figura 3.3 Simulación del Circuito Buck
Puede notarse en la Figura anterior que el valor de corriente que alimenta al láser
es el deseado, y que la tensión en el láser se encuentra dentro de los valores tolerados. Si
se desea mayor corriente con las mismas características de conmutación, es
40 El siguiente paso, es la conexión del MOSFET al driver, el cual va a convertir la señal
de PWM a la tensión necesaria para gestionarlo.
La conexión del IR2110 es como la que se muestra:
Figura 3.4 Armado del driver completo
Por lo general, cuando se usa un MOSFET, se tiene que hacer un acoplamiento de
señal para poder activar al mismo, ya que este es activado por tensión. Para efectos
prácticos se usará el IR2110.
El IR2110 es un driver para MOSFET, el cual acopla la etapa de control o de señales
y la envía a la compuerta del MOSFET. Este driver tiene capacidad para conectar 2
MOSFET.
41
Figura 3.5: Conexión típica del IR2110 para dos MOSFET [15]
Mediante el uso del HIN y del LIN, puede conectarse la señal de PWM al circuito
Buck, y obtener a la salida la señal de PWM y la tensión necesaria para activar el MOSFET.
Se puede observar que solo se usará una entrada del IR2110, por lo que el resto de
los pines son enviados a tierra. Para fines de prueba, se ha colocado un generador de
funciones emulando así una señal cuadrada.
42
Figura 3.7 Visualización del funcionamiento del driver ante una señal cuadrada. b)Parámetros
asignados
Por lo que el circuito propuesto, es el que sigue:
Figura 3.8 Circuito propuesto integrando el IR2210 y el IRF610
3.2 Láser
La función del diodo láser en el sistema de grabado es la de remover la pintura que
cubre el cobre que no se va a utilizar, para que una vez vertida la placa en el cloruro
43 corresponde a las pistas que han de conectar el circuito eléctrico. En primera instancia, el
asesor propuso utilizar un láser de diodo rojo con una potencia de salida de 200mW y una
longitud de onda de 609nm. No obstante, las características de este láser de diodo no son
suficientes para la aplicación que se propone, ya que tiene una potencia óptica máxima de
500mW, por lo que no es posible que vaporice en su totalidad la cubierta deseada,
entonces se propuso que fuera un láser de diodo de mayor potencia, decidiendo utilizar
un láser de diodo azul con una potencia óptica de hasta 1500mW. La potencia de salida
aunado a que el color azul tiene un mayor grado de absorción en el color negro, que es el
color de pintura en aerosol a utilizar para cubrir la placa, hacen que sea el recurso ideal
para implementarlo y que teóricamente podría lograr remover el sobrante de la pintura
negra para las pistas del circuito impreso.
Haciendo un poco de investigación, se logró encontrar un láser de diodo fabricado
por Nichia (empresa japonesa dedicada a la fabricación y venta de optoelectrónicos). El
láser de diodo NBD7412T es un láser con 1600mW de potencia óptica y posee una
longitud de onda de 445nm. Para alcanzar esta potencia es necesaria una corriente de al
44
Característica Símbolo
Rango máximo
absoluto Unidades
Corriente If 1.2 A
Potencia óptica de salida Po 1.5 W
Tensión de alimentación Vr(LD) 5 V
Temperatura de
almacenamiento Tstg -40 a 85 °C
Temperatura de operación Tc 0-30 °C
Tabla 3.1 Características del NBD7412T
La ventaja es que este diodo láser incluye una lente para hacer colimar la luz, ya
que no basta solamente con generar la luz láser, sino que también hay que hacerla
coherente.
a) b)
45 Es necesario citar que debido a la carencia de espejos dentro de la construcción del
diodo láser, al genera luz estimulada, esta se dispersa. Esto es un defecto que todos los
láseres de diodo poseen.
Figura 3.10 Dispersión de la luz en un láser de diodo
Con la lente que incluye el fabricante del láser de diodo, se puede hacer que la luz
se concentre, sin embargo, en algún punto la luz volverá a ser divergente. Para evitar ello,
se le coloca un espejo parcialmente reflejante, y de acuerdo a las características de este,
se puede obtener una luz con un comportamiento prácticamente lineal. La dimensión del
haz concentrado está en función de este espejo.
46 Sin embargo, con la luz colimada por el lente es posible vaporizar si el material es
colocado a la distancia en donde la luz cruza.
Figura 3.12 Se muestra el punto en donde es posible vaporizar.
47 La Figura 3.13 muestra el haz resultante de trabajar solamente con la lente
convexa. Puede notarse que el haz de lado izquierdo es más delgado que el haz de lado
derecho. En el punto donde se encuentra más delgado es donde se puede vaporizar.
Pensando en colimar la luz, se diseñó un equipo láser sencillo, el cual, aparte de
permitir montar el lente para lograrlo, el calor sea disipado, ya que 1500mW genera una
cantidad de calor significativa que, con el uso constante, dañaría rápidamente al diodo
láser.
Se construyó un apuntador el cual está constituido de 2 partes:
La primera parte es el macho, en el cual va montado el láser de diodo a presión.
Tiene forma de tornillo y es el que mantendrá fijo al láser. Las cuerdas servirán para variar
la distancia de enfoque.
Figura 3.14 Macho del apuntador
La segunda parte es la hembra, en el cual va montada la lente con un pegamento.