INSTITU
ESC
UNIDAD P
DEPARTAMENTO D
“DISEÑO DE UN
MONITOREO
CALDE
Q U E P
INGENI P R
I
FEL
CES
ASES MÉXICO, D.F.ITUTO POLITÉCNICO NACIONA
CUELA SUPERRIOR DE INGENIERIA MECÁNICA Y ELÉCTRICA
PROFESIONAL ADOLFO LOPEZ MATE
DE INGENIERIA EN CONTROL Y AUTOM
N SISTEMA DE CONTROL DE TEM
EO BASADO EN LOGICA DIFUSA
DERA ELECTRICA DEL LABINTHA
T E S I S
P A R A O B T E N E R E L T I T U L O D E :
NIERO EN CONTROL Y AUTOMATIZACIÓN
R E S E N T A N
IVAN CARMONA TABOADA
LIPE ANTONIO CASAS GARCIA
ESAR DANIEL SALAZAR ZARZA
SORES
DR. ISRAEL ALVAREZ VILLALOBOS DR. IGNACIO CARVAJAL MARISCAL
NAL
TEOS
OMATIZACION
MPERATURA Y
A PARA LA
HAP”
:
N
IVAN CARMONA TABOADA
A Dios
Por acompañarme todos y cada uno de mis días y que gracias a el mis padres me dieron la vida.
A mi padre:
Por ser mi pilar, mi sustento, mi ejemplo, mi amigo y sobretodo mi héroe. Porque siempre me apoyo a pesar de mis errores y rebeldías, a pesar de mis enojos y caprichos, a pesar de que en su momento quise claudicar y dejar todo él estuvo ahí y siempre recibí un consejo, un apoyo un hombro donde llorar y un gran amigo en quien confiar. Gracias papa por que conoceré miles de personas pero tú siempre serás mi héroe.
A mi madre:
Por ser mi confidente y mi amiga, por su ternura, bondad, amor y calor brindado. Porque a pesar de todo siempre estuvo ahí, por concederme la vida y darme los valores necesarios para lograr mis metas, por ser mi mejor amiga, porque a lo largo de mi vida e conocido un sin fin de mujeres y mi madre siempre a estado ahí y ella nunca me fallo y nunca me fallara como madre. Por esas noches de lágrimas que me regalo a su lado, por que sin ella no me hubiese levantado de mis fracasos. Por ser la gran mujer que eres te doy las gracias mami, porque yo soy tu reflejo.
A mi hermano:
Si alguien tengo que darle las gracias es a ti hermano mio, sin ti no lo hubiera logrado, soportaste mis lágrimas, mis risas, mis amores y desamores, siempre estuviste ahí, tu y solo tu eres el único que me conoce mas que nadie. Gracias hermano porque podre tener miles de amigos pero tú serás siempre mí mejor y gran amigo. Ahora sigues mis pasos y estoy orgulloso de ti, sé que serás un hombre de bien y la verdad mucho mejor que yo. Gracias hermano mio sin ti no lo hubiera logrado.
A mi abuelita marina:
Al igual que tengo dos madres, tengo dos padres, y ese eres tu, gracias abuelito porque yo algún día quisiera ser como tú siempre te veré en lo más alto. Gracias por que siempre me apoyaste y diste todo de ti para que yo lograra mi meta, me cuidaste y aconsejaste y siempre sé que contare con tu apoyo y amor porque si me reflejo en mi madre, la verdad yo soy la calca tuya. Gracias abuelito.
A mi Tía Julieta:
Gracias tía porque gran parte de mi infancia estuviste ahí, me cuidaste como si fuera tu hijo, alimentaste y valoraste como si fuera tuyo, gracias tía por siempre apoyarme y estar al pendiente mio.
A mi abuelito Anselmo:
Por traer al mundo a mi padre, por sus cariño y ternura, su bondad y paz. Gracias abuelito por que siempre sacaste de mi una sonrisa y alegría para ver la vida diferente.
A mi tío miguel:
Porque desde pequeño me crio, cuido, amo y valoro. Siempre te vi como mi hermano mayor y algún día quería ser como tu. Gracias tío por siempre apoyarme y darme el mejor de los consejos.
A mi tío enrique:
Porque siempre recibí de ti un consejo sano y sincero. Porque siempre me apoyaste y me aconsejabas seguir adelante pese a que veías mal. Gracias infinitamente gracias tío.
A mi tía Wendy:
Que me cuido desde siempre, que era mi hermana a la que siempre cele, pero que siempre me aconsejo acudir a la escuela y ser un hombre de bien.
A mi tío Hugo:
hermano mi infancia fue tan feliz y parte de mi madurez gracias a ti, siempre podre contar contigo y te agradezco todas y cada veces que siempre te pedí un consejo que me permitieron acabar mis estudios.
A mi prima dessire:
Siempre que necesite un apoyo o un consejo mas serio estuviste ahí, eres mi confidente y mi mejor amiga, gracias prima por siempre apoyarme y estar conmigo en mis momentos mas difíciles.
A mi primo Ricardo:
Gracias primo por que tu y yo hemos vivido cosas similares y siempre que necesitaba un a un amigo con quien platicar estabas ahí, nunca me dejaste solo y siempre me aconsejabas seguir adelante y acabar mi carrera. Gracias por todo primo.
A mis amigos:
Cesar Daniel Salazar, Antonio Casas e Isaac Hernández, por ser mis hermanos, por que siempre me apoyaron y estuvieron ahí cuando mas los necesite, nunca me fallaron, y siempre que necesite un consejo me dieron lo mejor de si. Gracias hermanos nunca los olvidare.
A mis profesores:
de pensar han sido la clave para que esta tesis que se presenta sea un echo y personalmente un gran éxito, en diversos momentos las fuerzas flaquearon pero esa es la grandeza de este trabajo el sobrepasar estas adversidades, es para mi una gran satisfacción el que se lea y se ponga atención a este escrito por lo cual quisiera agradecer ampliamente a toda la gente que me apoyo en este camino pero de manera significativa a;
Mis hermanos Juan, Alejandra y Magali, su gran lealtad y apoyo incondicional los hace brillar con su sola presencia.
Mi pareja Karina Ivet Navarrete Vázquez, aportándome esa fuerza que te da el amor y que hace que sobrepases cualquier obstáculo.
Mis grandes amigos Isaac, Pilar, Ivan y Daniel, una hermandad que perdurara para toda la vida.
De la misma forma agradeciendo y dedicando completamente esta tesis a mis padres Alejandro Casas Asmed y Juana Catalina García Molina dos seres humanos increíbles, ese estandarte en mi vida siendo para mi un orgullo y teniendo mi completa admiración, son y serán siempre las personas mas importantes en mi vida.
Gracias a
Gracias a
Gracias a
Gracias a mis padres:
mis padres:
mis padres:
mis padres:
Por la herencia mas valiosa que recibo de su parte, la cual agradeceré eternamente, fruto del inmenso apoyo y confianza que en mi se deposito para que sus esfuerzos y sacrificios hechos durante todo este tiempo no fueran en vano, ya que juntos hemos logrado esta meta: Mi carrera profesional, con todo mis respeto y cariño, gracias Mami por darme la vida, por siempre procurarme y estar al pendiente de mi día con día, por ser la principal mujer en mi vida que se que siempre estarás ahí cuando yo mas lo necesite y nunca me defraudaras, como hasta ahora ha sido que cada vez que te necesito estas ahí para tenderme la mano y apoyarme en todo incondicionalmente y Papi que con base a esas exigencias, carácter y ejemplo que me has dado toda la vida hoy en día soy mas competente, siempre me enseñaste a ir un paso adelante de todo, nunca bajando los brazos para nada, ser responsable y que todo lo que se quiere se puede realizar en base a esfuerzo y dedicación, ya que eres un ejemplo a seguir por todo lo que nos has demostrado a mis hermanos y a mi, esto es algo que a pesar de ciertos errores que cometí siempre me ayudaron a levantarme sin pensarlo y es por esto que hoy en día he llegado hasta donde estoy por que sin ustedes yo no lo sería ya que me han inculcado demasiados valores, con todo mi respeto y amor, Dios los bendiga siempre por todo lo que hicieron por mi, prometo no defraudarlos y seguir creciendo día con día mas.
Gracias a
Gracias a
Gracias a
Gracias a mi
mi
mi hermano Diego
mi
hermano Diego
hermano Diego::::
hermano Diego
Que durante mucho tiempo fuimos cómplices de travesuras y relajos, que hoy en día por ocupaciones de ambos ya no hay cierta cercanía pero a pesar de eso se que cuento incondicionalmente contigo para todo por que lo has demostrado y de mi parte sabes de antemano que no te fallare por que siempre lo que este en mis manos te apoyaré para que ahora tu vallas forjando tu camino y espero poder darte un buen ejemplo toda la vida, te quiero un buen Diego y juntos seguiremos creciendo día a día oponiéndonos ante cualquier obstáculo que se nos presente.
Gracias a
Gracias a
Gracias a
Gracias a mi
mi
mi hermana Diana
mi
hermana Diana
hermana Diana
hermana Diana::::
Por ser una luz que llego a esta familia hace 11 años, que diario nos sacas una sonrisa a todos con esas ocurrencias y alegría que tienes, por que con tu compañía siempre haces muy ameno el tiempo y por que se que confías en mi, nunca te defraudare, al igual que con Diego también siempre estaré contigo para lo que necesites, te quiero mucho hermanita y sigue así como hasta ahora siendo la numero uno como siempre dices.
Gracias a
Gracias a
Gracias a
Gracias a mi
mi
mi
missss abuelos
abuelos
abuelos
abuelos Luisa
Luisa
Luisa
Luisa y Lorenzo
y Lorenzo
y Lorenzo
y Lorenzo::::
confiado en mi y preocupado por que todo valla bien, eso es algo que agradezco de corazón.
Gracias a
Gracias a
Gracias a
Gracias a mi
mi
mi
mi tío
tío
tío
tío Alex
Alex
Alex
Alex::::
Por que siempre me has apoyado en todo y procurado desde niño incondicionalmente, ayudándome a crecer y a enseñarme las cosas malas y buenas de la vida, dándome un ejemplo a seguir, que por tus exigencias me enseñaste a obtener y realizar muchas cosas, hoy día eso lo agradezco infinitamente y por que se que siempre puedo contar contigo.
Gracias a
Gracias a
Gracias a
Gracias a mi
mi
mi
mi tía
tía
tía
tía lulú
lulú
lulú
lulú::::
Por que me has demostrado ser mi amiga también tendiéndome la mano y tu apoyo incondicionalmente, por los consejos obtenidos de tu parte que hoy en día también me han complementado a crecer como persona y como profesionista, es por eso que estoy muy agradecido contigo ya que ante cualquier problema nunca me has dejado solo.
Gracias a
Gracias a
Gracias a
Gracias a mi
mi
mi
mi tío T
tío T
tío T
tío Toño
oño
oño
oño::::
Por que desde que yo era un niño siempre fuiste como mi hermano mayor y amigo con el cual comencé con relajos, travesuras y demás complicidades, por que hoy en día se que cuento contigo en todo, por que aun siendo niño me enseñaste a distinguir entre lo bueno y lo malo de la vida y eso es algo que llevo conmigo siempre, tu ejemplo y las ganas de luchar día a día, hoy junto con tu familia Mireya y Camila se que puedo contar con ustedes para todo y que de mi parte será lo mismo.
Gracias a
Gracias a
Gracias a
Gracias a mi
mi
mi
mis
s
s
s tíos
tíos
tíos
tíos Luisa y Ricardo
Luisa y Ricardo
Luisa y Ricardo
Luisa y Ricardo::::
Por que se que siempre he contado con ustedes y me han demostrado un gran cariño y confianza, agradezco infinitamente cada uno de sus consejos, palabras, alientos a seguir esforzándome día a día para conseguir estos objetivos, ustedes son un gran ejemplo para mi por lo que son, se que siempre puedo contar con ustedes dos y es por eso que les tengo un gran aprecio, de igual forma espero ser un buen ejemplo para Ricky y Roberto ya que siempre que lo necesiten estaré para ellos por que los considero y los quiero como hermanos.
Gracias a
Gracias a
Gracias a
Gracias a mi
mi
mi
mis
s
s tíos
s
tíos
tíos Nena y Choco
tíos
Nena y Choco
Nena y Choco
Nena y Choco::::
apoyo incondicional, se que siempre creíste en mi y hoy en día esto es uno de los frutos que se obtiene por ese apoyo y confianza depositada en mi, te agradezco infinitamente y así como se que puedo contar contigo para todo, de igual forma es de mi parte contigo y con Lola
Gracias a
Gracias a
Gracias a
Gracias a Marisol
Marisol
Marisol
Marisol
::::
Por que aunque por cuestiones del destino hoy en día ya no estemos juntos, fuiste un pilar y motivación muy importante durante mas de 5 años, desde antes de iniciar esta carrera, se que siempre depositaste tu confianza y creíste en mi, agradezco infinitamente tu amor, comprensión, apoyo, consejos, compañía y demás virtudes durante todo este tiempo por que estuviste siempre incondicionalmente junto a mi en mis alegrías, logros, tristezas, enojos, además por que se que hoy en día puedo seguir contando y confiando en ti y que incondicionalmente estarás siempre alado mío cuando te necesite, me ayudaste y enseñaste muchas cosas que me hicieron crecer como persona, de antemano sabes que siempre estaré apoyándote cuando lo necesites ya que las cosas suceden por algo y que de todo corazón deseo que tu al igual vallas forjando tu camino a base de éxitos.
Gracias a
Gracias a
Gracias a
Gracias a mi
mi
mi
missss amigos
amigos
amigos::::
amigos
Iván Carmona, Felipe Casas, Isaac Hernández por que siempre hubo ese compañerismo y amistad en todo, siempre cuando uno se caía estaban para levantarlo, por sus consejos, enseñanzas y complicidades, todas esas situaciones y mas se les agradece, a Pilar Romero, Rodrigo Morales e Iván Navarro por su amistad demostrada en todo este tiempo, los consejos, sugerencias, regaños y apoyo en este trabajo se les agradece infinitamente colegas Ingenieros, a Berenice Gutiérrez que en tiempos muy difíciles para mi siempre tuviste aquellas palabras y consejos, fuiste una guía muy importante por que me enseñaste en base a eso a siempre mirar adelante siendo una mejor persona por sobre todo día a día y que cuando andaba mal siempre tuviste esa chispa para levantarme.
Gracias a
Gracias a
Gracias a
Gracias al Instituto
l Instituto
l Instituto
l Instituto Politécnic
Politécnic
Politécnic
Politécnicoooo Nacional
Nacional
Nacional
Nacional y ESIME Zacatenco
y ESIME Zacatenco
y ESIME Zacatenco
y ESIME Zacatenco::::
Por brindarme mi preparación y por ser mi más grande orgullo pertenecer a esta alma mater, aprendí a amar las instalaciones como mi más grande casa de estudios, por que aquí fui politécnico por convicción no por circunstancia.
Gracias a
Gracias a
Gracias a
Gracias a mi
mi
mi
missss profesores
profesores
profesores
profesores::::
ÍNDICE
Contenido
RELACIÓN DE FIGURAS ... iii
RELACIÓN DE TABLAS ... v
RESUMEN ... vi
INTRODUCCIÓN ... vii
OBJETIVO ... x
CAPÍTULO I ... 1
“LÓGICA DIFUSA Y CONTROL DIGITAL” ... 1
1.1 Funcionamiento de calderas ... 2
1.1.1 Tipos de calderas ... 2
Calderas pirotubulares ... 2
Calderas acuatubulares ... 3
Calderas eléctricas ... 4
1.2 Antecedentes de la lógica difusa ... 6
1.3 Bases de la lógica difusa ... 7
1.3.1 Estructura de un controlador difuso ... 8
1.3.2 Diseño de controlador difuso ... 8
Selección de las variables ... 9
Proceso de inferencias ... 10
Estrategia de fuzificacion ... 11
Construcción de las bases de reglas ... 13
Selección de lógica de toma de decisiones ... 14
Estrategia de defuzificacion ... 15
1.3.3 Conjunto difuso ... 17
1.4 Antecedentes del control digital ... 18
1.5 Sistemas de control digital ... 20
1.5.1 Elementos básicos de un sistema de control digital ... 20
1.5.3 Ventajas del uso de controles digitales ... 22
1.6 Aislante térmico ... 23
CAPÍTULO II ... 24
“DESCRIPCIÓN DE LA INSTALACIÓN EXPERIMENTAL” ... 24
2.1 Descripción general de del equipo e instrumentación ... 25
2.1.1 Sistema eléctrico de potencia y control ... 27
2.1.2 Sistema hidráulico ... 30
2.1.2 Sistema de aire ... 35
2.2 Instrumentación existente ... 36
CAPÍTULO III ... 38
“DISEÑO DEL SISTEMA DE CONTROL BASADO EN LA LOGICA DIFUSA Y SELECCIÓN DEL AISLANTE TERMICO” ... 38
3.1 Calculo de la pèrdida de calor en la tubería ... 39
3.2 Selección del aislante térmico para la tubería ... 42
3.3 Diseño del sistema de control basado en la lógica difusa ... 43
3.3.1 Selección de las variables de entrada y salida ... 44
3.3.2 Selección de las funciones de membresía ... 45
3.3.4 Definición de las reglas lingüísticas ... 50
3.3.5 Superficies de control ... 52
3.3.6 Diseño de la interfaz ... 53
3.3.7 Programación de la interfaz grafica ... 55
CAPITULO IV ... 58
“RESULTADOS Y ANALISIS” ... 58
4.1 Banco de resistencias Desactivado ... 59
4.2 Activación Resistencia 1 ... 60
4.3 Activación Resistencia 2 ... 61
3.4 Activación Resistencia 3 ... 62
4.5 Activación Resistencia 4 ... 63
4.6 Programación de tareas realizadas ... 64
4.7 Presupuesto ... 65
CONCLUSIONES Y TRABAJO FUTURO ... 67
RELACIÓN DE RELACIÓN DE RELACIÓN DE
RELACIÓN DE FIGUFIGUFIGUFIGURASRASRASRAS
Figura 1.1 Representación de una caldera pirotubular……….. 3
Figura 1.2 Representación de una caldera acuatubular………. 4
Figura 1.3 Representación de una caldera eléctrica……… 5
Figura 1.4 Estructura de un controlador difuso……….. 8
Figura 1.5 Grado de pertenencia de las variables……… 9
Figura 1.6 Función gausina……….. 12
Figura 1.7 Figura 1.8 Figura 1.9 Función triangular………... Función trapezoidal………. Método del centro de área………... 12 12 17 Figura 1.10 Sistema de control de lazo cerrado con datos muestreados…………. 21
Figura1.11a Figura1.11b Entrada continua al muestreador……….. Salida discreta del muestreador……….. 21 21 Figura 2.1 Representación del DTI de la instalación de la caldera eléctrica….... 26
Figura 2.2 Motor eléctrico con el ventilador acoplado……… 27
Figura 2.3 Ventilador y banco de resistencias………. 28
Figura 2.4 Banco de resistencias para el calentamiento del agua………. 29
Figura 2.5 Tablero de control………... 30
Figura 2.6a Representación de la caldera y tanque de almacenamiento…………. 31
Figura 2.6b Representación del equipo de bombeo……….. 31
Figura 2.7 Representación del área de suministro de agua caliente……….. 32
Figura 2.9a Representación física del túnel de viento para pruebas a radiadores
de automóvil……….. 34
Figura 2.9b Túnel de viento para pruebas a radiadores de automóvil……… 35
Figura 2.10 Circuito del fluido del proceso……… 36
Figura 2.11 Manómetro tipo Bourdon y termopar tipo J………... 37
Figura 3.1 Aislamiento seleccionado para la tubería……….. 43
Figura 3.2 Funciones de membrecía para la temperatura del medida………….. 46
Figura 3.3 Funciones de membrecía para la temperatura deseada………... 48
Figura 3.4 Funciones de membrecía de la salida del sistema………. 49
Figura 3.5 Superficie de control de la relación Temperatura medida-Resistencia……… 52
Figura 3.6 Superficie de control de la relación Temperatura medida-deseada-Resistencia………. 53
Figura 3.7 Panel frontal de la interfaz……….. 54
Figura 3.8 Representación del bloque de la estructura de casos……… 55
Figura 3.9 Llamado del modelo difuso………. 56
Figura 3.10 Representación del programa de la interfaz de impresión de graficas y reglas lingüísticas……… 56
Figura 3.11 Representación del programa de la interfaz……….. 57
Figura 4.1 Pantalla de la interfaz para el estado Desactivado……… 60
Figura 4.2 Pantalla de la interfaz para el estado Resistencia 1……….. 61
Figura 4.3 Pantalla de la interfaz para el estado Resistencia 2……….. 62
Figura 4.4 Pantalla de la interfaz para el estado Resistencia 3……….. 63
RELACIÓN DE TABLA RELACIÓN DE TABLARELACIÓN DE TABLA RELACIÓN DE TABLASSSS
[image:13.595.80.517.123.617.2]Tabla 1.1 Proceso de inferencia………... 10
Tabla 1.2 Operadores lógicos difusos………... 11
Tabla 3.1 Intervalos de los estados de las variables de entrada………... 45
Tabla 3.2 Datos de las funciones de membrecía de las temperaturas………... 47
Tabla 3.3 Características de las funciones de temperatura deseada………. 49
Tabla 3.4 Características de los valores de las funciones de membrecía de la salida………... 50
Tabla 3.5 Método de inferencia de las variables………. 50
Tabla 4.1 Valores propuestos para la realización de las pruebas……….. 59
Tabla 4.2 Valores propuestos para la realización de las pruebas de Resistencia 1…… 60
Tabla 4.3 Valores propuestos para la realización de las pruebas de Resistencia 2……. 61
Tabla 4.4 Valores propuestos para la realización de las pruebas de Resistencia 3…….. 62
Tabla 4.5 Valores propuestos para la realización de las pruebas de Resistencia 4……. 63
Tabla 4.6 Programa de Tareas……….. 64
RESUMEN RESUMEN RESUMEN RESUMEN
El presente trabajo de tesis se aplico al desarrollo de un sistema de control de temperatura y monitoreo para una caldera eléctrica alimentada por un banco de cuatro resistencias cuyo objetivo principal fue eliminar la inestabilidad y el retardo que existe actualmente en la realización de pruebas físicas, esto basado en la lógica difusa que nos permite imitar la toma de decisiones del ser humano, haciendo que el control de temperatura y monitoreo sobre la caldera sea flexible y más rápido que con métodos convencionales.
Para el desarrollo de este proyecto se realizó el levantamiento de datos característicos del funcionamiento de la caldera del LABINTHAP, considerando los accesorios de la misma y las condiciones de trabajo. Con estos valores es posible obtener la pérdida de calor del agua en la instancia dentro de la tubería así como el calor que proporciona cada resistencia para poder separar el encendido de cada una de ellas.
INTRODUCCIÓN INTRODUCCIÓN INTRODUCCIÓN INTRODUCCIÓN
Dentro de la industria son de gran importancia y elevada aplicación las calderas, ya sean por combustión (Acuatubulares y Pirotubulares) o las calderas eléctricas. Principalmente las calderas eléctricas actualmente se controlan por medio de controladores PID, PLC entre otros métodos de control convencionales, lo cual satisface hasta cierto punto el control necesario para ciertos procesos.
Dentro de la instalación de pruebas a intercambiadores de calor compactos, se encuentra una caldera eléctrica ubicada dentro del Laboratorio de Ingeniería Térmica e Hidráulica Aplicada (LABINTHAP) en la Sección de Estudios de posgrado e Investigación (SEPI) de la Escuela Superior de Ingeniería Mecánica y Eléctrica (ESIME), es controlada manualmente, por lo que su control es lento al momento de realizar pruebas físicas, esto se debe a que no existe ningún tipo de control automático en la temperatura.
La caldera funciona con cuatro resistencias eléctricas, las cuales se controlan energizando y desenergizando manualmente la corriente eléctrica dependiendo de la temperatura que se desee en la salida. Además existe un retardo para la medición de la temperatura, ya que en la caldera se indica un valor de temperatura pero en la toma de medida ya se perdió parte del calor debido a la circulación del agua caliente por una longitud aproximada de 10 m de la tubería, la cual no cuenta con aislamiento.
Se han realizado tesis relacionadas con el control de temperatura de la caldera eléctrica del LABINTHAP, donde se proponen un control mediante PID o Controladores Lógicos Programables (PLC), este tipo de métodos tienen ciertas desventajas ya que el control sigue teniendo pequeñas variaciones por encima o por debajo del punto de referencia por que el banco de resistencias se activa y desactiva completamente dependiendo de la temperatura que se desea.
Para esto se desarrollo un sistema de control de temperatura y monitoreo basado en la lógica difusa porque se pueden construir modelos de razonamiento humano que reflejen el carácter vago, ambiguo, impreciso y cualitativo que éste tiene. De forma que sin modelos matemáticos detallados, se puedan implementar soluciones a problemas relativamente complejos, o muy mal definidos, como para admitir un tratamiento por métodos tradicionales, problemática común cuando se requiere automatizar o controlar procesos relativamente complejos.
En el capitulo uno se contextualiza los antecedentes de la lógica difusa y el control digital, además se sentara las bases teóricas que se necesitan para el desarrollo del sistema de monitoreo, se hablará brevemente de los fundamentos básicos de la lógica difusa que se aplicaron para el desarrollo del modelado y del controlador difuso, de igual forma se enumeran ventajas de ocupar este tipo de control, también se enlistan los tipos de calderas y ventajas de utilizar un aislante térmico para las tuberías.
En el capítulo dos se describe la instalación experimental del laboratorio explicando cada parte con la que consta, así como sus condiciones de funcionamiento y operación.
OBJETIVO OBJETIVO OBJETIVO OBJETIVO
CA
CA
CA
CAPÍ
PÍ
PÍTULO I
PÍ
TULO I
TULO I
TULO I
““““LÓGICA
LÓGICA
LÓGICA
LÓGICA DIFUSA Y CONTROL
DIFUSA Y CONTROL
DIFUSA Y CONTROL
DIFUSA Y CONTROL
DIGITAL
1.
1.
1.
1.1
1
1 Funcionamiento de calderas
1
Funcionamiento de calderas
Funcionamiento de calderas
Funcionamiento de calderas
Las calderas, de vapor y agua caliente, están ampliamente extendidas tanto para uso industrial como no industrial, y otras aplicaciones tales como, generación de electricidad, procesos químicos, calefacción, agua caliente, sanitaria, usos didácticos, etc, de igual forma existen calderas por combustión y eléctricas. En las primeras se lleva a cabo la combustión de algún gas para proporcionar el calor para evaporar el líquido introducido a la caldera y las calderas eléctricas proporcionan calor por medio de resistencias eléctricas conectadas en serie o en paralelo.
1.1
1.1
1.1
1.1.1 Tipos de calderas
.1 Tipos de calderas
.1 Tipos de calderas
.1 Tipos de calderas
Aunque existen numerosos diseños y patentes de fabricación de calderas, cada una puede tener características propias; las calderas se pueden clasificar en dos grupos; calderas pirotubulares y acuatubulares, algunas características se mencionan a continuación.
Calderas pirotubulares
Calderas pirotubulares
Calderas pirotubulares
Calderas pirotubulares
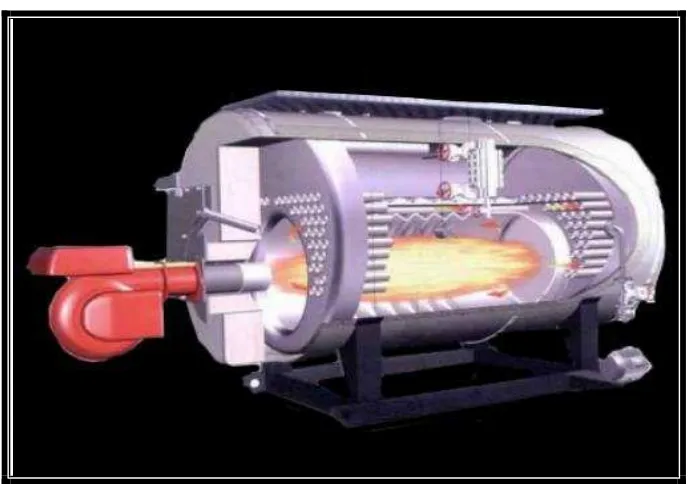
En la figura 1.1 se observa una caldera del tipo pirotubular, se denominan así por ser los gases calientes procedentes de la combustión de un combustible, los que circulan por el interior de tubos y el exterior está bañado por el agua de la caldera. El combustible se quema en un hogar, en donde existe una transmisión de calor, y los gases resultantes circulan a través de los tubos que constituyen el haz tubular de la caldera, y es ahí donde se encuentra el intercambio de calor. Según sea una o varias las veces que los gases pasan a través del haz tubular, se tienen las calderas de uno o de varios pasos.
denominadas cámaras de gases. Una vez realizado el intercambio térmico, los gases son expulsados al exterior a través de la chimenea.
Figura 1.1 Representación de una caldera pirotubular.
Calderas acuatubulares
Calderas acuatubulares
Calderas acuatubulares
Calderas acuatubulares
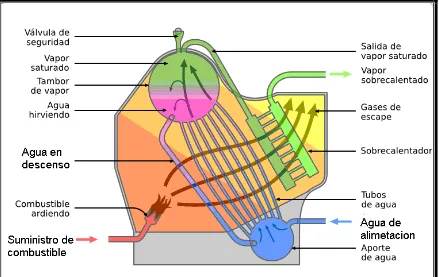
En la figura 1.2 se muestra la representación de una caldera acuatubular, en estas calderas el agua circula por el interior de tubos que conforman un circuito cerrado a través del calderín o calderines que constituye la superficie de intercambio de calor de la caldera. Adicionalmente, pueden estar dotadas de otros elementos de intercambio de calor, como pueden ser el sobrecalentador, recalentador, economizador, etc.
convección de la caldera. Finalmente, los gases son enviados a la atmósfera a través de la chimenea. Con objeto de obtener un mayor rendimiento en la caldera, se incorporan elementos, como economizadores y precalentadores, que hacen que la temperatura de los gases a su salida de la caldera sea menor, aprovechando así mejor el calor sensible de los gases.
Figura 1.2 Representación de una caldera acuatubular.
Calderas eléctricas
Calderas eléctricas
Calderas eléctricas
Calderas eléctricas
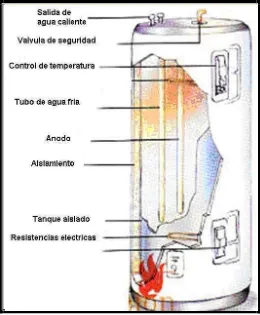
que nunca habrá problemas por falta de combustible. El funcionamiento de la caldera eléctrica se basa en el calor producido por una resistencia eléctrica inmersa en el agua contenida en un recipiente como se muestra en la figura 1.3.
[image:23.595.168.428.345.660.2]Las calderas eléctricas ofrecen un confort mucho mayor al de cualquier otro sistema eléctrico, ya que de todos ellos es la que puede garantizar una excelente provisión de agua sanitaria caliente como de calefacción, siempre y cuando se tenga una alimentación eléctrica. Sin embargo, la gran desventaja que existe en este tipo de calderas es que cuando no existe ningún tipo de control en la temperatura, al momento de alimentar las resistencias eléctricas, la temperatura se eleva con mayor rapidez, es por esto que los modelos actuales incorporan un microchip para el sistema de control encargado de regular la temperatura para producción de agua caliente.
1
1
1
1....2
2
2 Antecedentes de la lógica difusa
2
Antecedentes de la lógica difusa
Antecedentes de la lógica difusa
Antecedentes de la lógica difusa
El concepto de Lógica Difusa fue concebido por Lofti Zadeh, quien inconforme con los conjuntos clásicos que solo permiten dos opciones, la pertenencia o no de un elemento a dicho conjunto, la presentó como una forma de procesar información permitiendo pertenencias parciales a unos conjuntos que en contraposición a los clásicos los denominó Conjuntos Difusos (fuzzy sets), el concepto de conjunto difuso fue expuesto por Lofti Zadeh, el artículo se titula "Fuzzy Sets". El mismo Zadeh publica en 1971 el artículo, "Quantitative Fuzzy Semantics", en donde Introduce los elementos formales que acabarían componiendo el cuerpo de la doctrina de la lógica difusa y sus aplicaciones tal como se conocen en la actualidad [1].
Pocos años después en 1974, el Británico Ebrahim Mandani, demuestra la aplicabilidad de la lógica difusa en el campo del control. Desarrolla el primer sistema de control difuso (Fuzzy Control) práctico, la regulación de un motor de vapor. Las aplicaciones de la lógica difusa en el control no se pudieron ser implementadas con anterioridad a estos años debido a la poca capacidad de cómputo de los procesadores de esa época [1].
más espectaculares sistemas de control difuso creados por el hombre. Desde entonces el controlador inteligente ha mantenido los trenes rodando eficientemente. En 1987, "FUZZY BOOM", se comercializan multitud de productos basados en la lógica difusa (sobre todo en Japón)[1].
1.3
1.3
1.3
1.3
Bases de la l
Bases de la l
Bases de la l
Bases de la lógica difusa
ógica difusa
ógica difusa
ógica difusa
La lógica difusa es una extensión de la lógica tradicional (Booleanas) que utiliza conceptos de pertenencia, de sets más parecidos a la manera de pensar humana. La lógica difusa no usa valores exactos como 1 o 0, pero usa valores entre 1 y 0 que pueden indicar valores intermedios. Incluye los valores 0 y 1 entonces se puede considerar como un superset o extensión de la lógica exacta.
Es esencialmente lógica multivaluada que originan la lógica clásica, la cual impone a sus enunciados únicamente valores falso o verdadero. Esta a su vez a modelado satisfactoriamente a una gran parte del razonamiento natural, ya que el razonamiento humano utiliza valores de verdad que no necesariamente son tan deterministas. La lógica difusa procura crear aproximaciones matemáticas en la resolución de ciertos tipos de problemas. Pretende producir resultados exactos a partir de datos imprecisos [1]
El adjetivo “difuso” aplicado se debe a que los valores de verdad no-deterministas utilizados tienen por lo general, una condición de incertidumbre, ya que los valores obtenidos y resultados no son exactos en su 100%. Por otra parte, desde un punto de vista optimista, lo difuso puede entenderse como la posibilidad de asignar más valores de verdad a los enunciados que los clásicos “falso” o “verdadero” [1].
1.3
1.3
1.3
1.3.1 Estructura de un controlador difuso
.1 Estructura de un controlador difuso
.1 Estructura de un controlador difuso
.1 Estructura de un controlador difuso
Un controlador basado en lógica difusa es un sistema electrónico e informático que sirve de soporte físico para realizar inferencias con lógica difusa. Este dispositivo funciona en los niveles inferiores de la pirámide de control, cerrando lazos de control en forma similar al PID convencional su aplicación se basa en procesos complejos y con ciertas carencias, en cuanto a su definición ya que no se tiene conocimiento de valores cuantitativos o porque la información del sensor es imperfecta [1].
El controlador difuso será un caso particular de un controlador digital ya que su comportamiento será no lineal, sus bloques que lo constituyen serán una base del conocimiento, una base de datos un proceso de inferencias, un fuzificador y un defuzificador mostrado en la figura 1.4
Figura 1.4 Estructura de un controlador difuso
1.3
1.3
1.3
1.3.2 Diseño de controlador difuso
.2 Diseño de controlador difuso
.2 Diseño de controlador difuso
.2 Diseño de controlador difuso
El diseño se asienta en un conocimiento heuristico sobre el proceso y pruebas de ensayo error hasta conseguir una respuesta adecuada a las especificaciones solicitadas.
debe de estar estable el proceso en la planta. Esta forma de controlar el proceso se describe con los siguientes pasos:
1.- Selección de las variables. 2.- Proceso de inferencia.
3.- Selección de la estrategia de fuzificacion. 4.-Constricción de la base de reglas.
5.- Selección de lógica de toma de decisiones. 6.-Selección de la estrategia de defuzificacion.
Selección de las variables
Selección de las variables
Selección de las variables
Selección de las variables
Se especifica cuáles son las variables de entrada y de salida en el proceso, las cuales queremos relacionar a través del controlador, para lo cual se necesita saber cuál es su intervalo de variación. Resaltando 2 casos:
El controlador difuso puede desarrollarse con base al conocimiento de un experto humano.
Si es la primera vez que se analiza el problema, habrá que elegir las variables que incidan directamente en las variables controladas, trabajando sobre el error o alguna función del error. Estas a su vez serán las variables provenientes del sensor para posteriormente realizar identificación de intervalos. Como se observa en la figura 1.5 [1].
Proceso de inferencias
Proceso de inferencias
Proceso de inferencias
Proceso de inferencias
Se encarga de concadenar lo involucrado con la base de conocimientos, aplicando una regla de inferencia composicional. El proceso de inferencia incluye dos conocimientos: la implicación difusa y la regla composicional de inferencia. Si tenemos las observaciones A y B entonces la conclusión difusa C puede ser inferida por:
C´= (A´, B´) o R
Donde “o” representa el operador composicional dentro de las estrategias de inferencia.
Después que las variables de entrada han sido convertidas a valores de variables lingüísticas, el paso de inferencia difusa identifica las reglas que se aplican a cada situación, y mediante el método de MAX/MIN se determina los valores de la variable lingüística de salida, en el caso que se tenga solo una salida. El siguiente ejemplo muestra como se aplica este método el cual está compuesto de dos pasos:
Agregación, que relaciona los antecedentes de las reglas.
Composición, el cual proceda los consecuentes de las mismas
Suponiendo que está controlado un proceso y las variables lingüísticas de entrada son: “distancia” y “ángulo” y la variable de salida: “potencia”; se pueden escribir a manera de ejemplo, la siguiente base de reglas con los valores de pertenencia de las etiquetas que componen los antecedentes de cada una de las reglas.
Tabla 1.1 Proceso de inferencia
Regla 1 Sí distancia = grande (1)
) 1 . 0
( y ángulo = cero (0.8)(1) entonces potencia = positiva-media
Regla 2 Sí distancia = grande (1)
) 9 . 0
( y ángulo = cero (0.2)(1) entonces potencia = positiva-media
Regla 3 Sí distancia = grande (0.1)(1)
y ángulo = cero (0.2)(1) entonces potencia = positiva-media
La parte de la regla 1 combina las condiciones “distancia = media” y “ángulo = positivo-pequeño”, definiendo la valides de la regla en la situación presente. En lógica convencional, la combinación de las dos condiciones se puede evaluar mediante la función Bolena AND. En el caso de la lógica difusa no se puede utilizar la función boleana AND, porque esta no maneja valores intermedios entre 0 y 1. En este caso se definen conectivos lógicos AND, OR, Y NOT representados en la tabla 1.2
Tabla 1.2 Operadores lógicos difusos
AND
µ
A
∩
B
(
u
)
=
min{
µ
A
(
u
),
µ
B
(
u
)}
ORµ
A
∪
B
(
u
)
=
max{
µ
A
(
u
),
µ
B
(
u
)}
NOT
)
(
1
)
(
u
A
u
A
−
−
=
µ
µ
Se aprecia, que las reglas 1 y 3 tiene la misma etiqueta de salida, pero diferentes grados de verdad. En lógica difusa, las reglas que tienen el mismo consecuente se evalúan mediante un operador OR, representado mediante el operador matemático “Max”, lo anterior es parte de el método MIN/MAX, llamado composición, que define los valores difusos de salida, para que posteriormente sean utilizados en el proceso de defusificacion.
Estrategia de fuzificacion
Estrategia de fuzificacion
Estrategia de fuzificacion
Estrategia de fuzificacion
Su función es de asociar a las entradas con una función de pertenencia (Figura 1.6, 1.7 y 1.8).
El fusificador transforma la medición del valor deterministico de una variable en valores subjetivos. En base a esto se distinguen las siguientes funciones:
• Hacer una adaptación de escalas de estas variables de entrada en una
serie de normalización
• Asociar a la entrada un valor lingüístico que puede verse como la
pertenencia a un conjunto difuso
Figura1.6 Función gausina Figura 1.7 Función triangular
Figura 1.8 Función trapezoidal
Se determina en qué grado las variables de entrada pertenecen a los conjuntos difusos a través de su función de pertenencia. Realizando un bloque en donde tendrá en sus entradas los valores asociados a conjuntos difusos con sus funciones de pertenencia, para ello se define su conjunto o universo de conjunto [1]
etiquetas lingüísticas con que nos referiremos a las variables de entada y de salida. En caso de trabajar con el error valores típicos son positivo pequeño (PP), negativo mediano (NM), por lo general se suelen elegir entre 2 y 10 etiquetas lingüísticas para cada variable de entrada o salida. Con respecto a las formas de las funciones de pertenencia no existen diferencia apreciables, ya que adquieren la forma deseada, ya sea trapezoidales, triangulares, etc [1].
En base a esto las salidas de nuestro controlador difuso presentaran números reales, ya que a partir de estos se generaran los valores de tensión, corriente u otra magnitud física que manejan los actuadores del sistema de control bajo diseño. Se planeta que el controlador provea una salida para todos los estados posibles de la planta a controlar. Para ello todas las entradas y salidas del controlador difuso deben poder vincularse a un controlador difuso y a su vez cada controlador difuso debe involucrase con el antecedente y consecuente de una regla [1]
Construcción de las bases de reglas
Construcción de las bases de reglas
Construcción de las bases de reglas
Construcción de las bases de reglas
El controlador ya mencionado trabaja por medio de reglas de tipo “if, then” que se combinan entre sí para formar un único conjunto difuso de salida. Existen diferentes alternativas para la resolución de estas reglas, tales como:
Basadas en un modelo difuso del proceso.
Se describe una forma lingüística no solo del proceso de control, sino también de las características dinámicas a controlar. A partir de este modelo de obtiene las reglas difusas para controlarlo, con reglas de tipo:
R1: IF s1 is S1 ,i AND s2 is S2 ,i AND s3 is S3 ,i AND…. sp is Sp i THEN vi= a0i + a1 i s1 +a2 i s2 + ...+ ap i sp
Vi = salidas
s1 i y s2 i = etiquetas lingüísticas a0i, a1i, a2i = parametros a identificar
Basadas en aprendizaje.
Se basa en el controlador auto-organizador, que está formado por dos cuerpos de reglas. Uno que hace el control propiamente dicho, y otro a un nivel supervisor, que exhibe el comportamiento que seguirá un programador humano mejorando las reglas de control. [1]
La estrategia de control, derivada de la experiencia se expresa mediante el uso de algoritmos difusos. Las reglas de control pueden ser:
Reglas de evaluación de estado
Este tipo de reglas es el más se utiliza, y en el caso de los sistemas de entradas múltiples y salida única, toman al siguiente forma:
R1: si x es A1,……… y w es B1 entonces z es C1 R2: si x es A2,……… y w es B2 entonces z es C2 R3: si x es A3,……… y w es B3 entonces z es C3 R4: si x es An,……… y w es Bn entonces z es Cn
Selección de lógica de toma de decisiones
Selección de lógica de toma de decisiones
Selección de lógica de toma de decisiones
Selección de lógica de toma de decisiones
que cubra la condición no incluida. Trabajando con al matriz de inferencias, es difícil dejar fuera situaciones no previstas.
En un controlador difuso las reglas interactúan entre sí, la presencia de una de ellas altera el comportamiento del conjunto difuso y viceversa. Este conjunto es el que forma la superficie de control final. Las reglas contradictorias, que propagan acciones de control opuestas, deben ser eliminadas o reemplazadas en la base de conocimiento. En un controlador difuso en el que no interviene una gran cantidad de reglas, la consistencia puede determinarse por simple inspección [1]
Estrategia de defuzificacion
Estrategia de defuzificacion
Estrategia de defuzificacion
Estrategia de defuzificacion
Una vez seleccionadas la reglas se realiza la selección de reglas en la base, es decir la inferencia, la cual será también un conjunto difuso. Resaltando que para manejar el actuador es necesario una magnitud no difusa. De igual forma que la salida del controlador en ocasiones no da salida de tensión necesaria para hacer funcionar al dispositivo implementado, por lo que es necesario un bloque que sea capaz de dar una salida determinada la cual representa lo mejor posible la acción de control deseada.
Básicamente este proceso, en un mapeo de un espacio de acciones de control difuso definido sobre un universo de discurso de salida, en un espacio de acciones de control no-difuso, siendo muy importante esta interfaz, ya que la mayoría de las aplicaciones prácticas de control requiere variables numéricas. De las estrategias más usadas se pueden mencionar las siguientes:
Método del criterio máximo
Método del promedio máximo
Método del criterio máximo
Da como resultado el punto en el cual la distribución de posibilidades de la acción de control alcanza el valor máximo.
Método del promedio máximo
Esta estrategia genera una acción de control, la cual es el promedio de todas las acciones de control cuyos grados de pertenencia alcanzan el valor máximo. Concretamente en el caso de un universo discreto, la salida de control puede definirse por medio de la ecuación 1.1.
I W Z j j
∑
= = 1 10 (1.1)
Donde Wj es el valor central de la etiqueta lingüística “j” para la cual la
función de membrecía alcanza el máximo valor
µ
z(Wj) y “I” es el número deetiquetas que alcanzan el valor máximo.
Método del centro de áreas
Se calcula el centro de gravedad de la distribución de salidas de control difuso para obtener la señal de control, la cual se aplica al sistema a controlar. Para el caso de un universo discreto, la salida defusificada se puede obtener mediante la ecuación 1.2.
)
(
*
)
(
1 1 0 j z n j j j zz n jW
W
W
Z
µ
µ
= =∑
=
∑
(1.2)Donde n es el número de niveles de cuantificación del universo de salida y
z
formar una sola. Balanceando esta área se obtiene el valor preciso de salida. Lo anterior se muestra en la figura 1.9
Figura 1.9 Método del centro de área
1.3
1.3
1.3
1.3.3 Conjunto difuso
.3 Conjunto difuso
.3 Conjunto difuso
.3 Conjunto difuso
Es una colección bien definida de elementos, en la que es posible determinar para un objeto cualquiera, en un universo dado, si acaso este pertenece o no al conjunto. La decisión, naturalmente, es “si pertenece” o bien “no pertenece” [1].
En un conjunto difuso a cada elemento del universo se le asocia un grado de pertenencia, que es un número entre 0 y1 a ese conjunto. Un conjunto difuso es una correspondencia o función que a cada elemento del universo le asocia su grado de pertenencia. Un conjunto difuso es una función cuyo dominio es el universo y cuyo contra dominio es el intervalo [0;1]. En tanto el grado de pertenencia sea más cercano a 1 tanto más estará el elemento en el conjunto y en tanto el grado de pertenencia sea más cercano a 0 tanto menos estará el elemento en el conjunto. [1]
Los conjuntos intuitivos pueden combinarse mediante las operaciones, llamadas booleanas, de complemento, unión e intersección: El complemento de un conjunto esta formado por los elementos del universo que no están en el, la unión de dos conjuntos la forman los elementos que están en uno o en otro conjunto y la intersección la conforman los elementos en ambos conjuntos.
Si nos referimos a funciones características, se tiene que la característica del complemento posee el valor opuesto al de la característica del conjunto, la característica de la unión de dos conjuntos vale uno si al menos una de las características de los conjuntos vale uno, y la característica de la intersección vale uno si las características de ambos conjuntos valen uno. Esto da origen a los operadores de conjuntos difusos. Para cada una de las interpretaciones se puede introducir una colección particular de operadores. [1]
1.4
1.4
1.4
1.4 Antecedentes del control digital
Antecedentes del control digital
Antecedentes del control digital
Antecedentes del control digital
El control digital se puede fijar como momento inicial los años 50’s donde aparecen las primeras computadoras dedicadas al control de proceso. Eran muy grandes en cuanto a volumen, tenían un gran consumo y generalmente su fiabilidad no era muy grande. En 1956 se instala en la compañía Texaco un sistema que controla 26 caudales, 72 temperaturas y 3 composiciones. Este computador realizaba una suma en 1 ms y una multiplicación en 20 ms. Su tiempo medio entre fallas (TMEF ó MTBF) que mide la fiabilidad de un equipo era de 50 a 100 hs solo para la CPU. Como características de la época se puede decir que no estaba avanzada aún la implementación de modelos en tiempo real. Lo que se usaba eran complejos modelos basados en el comportamiento físico del proceso. Había además un escaso desarrollo en materia de sensores. También se advierte por ese entonces un fuerte rechazo a la introducción de nuevas tecnologías.
entonces, como argumentación el concepto de Control Digital Directo (CDD o DDC), es decir que una única computadora controla toda una planta o proceso. Una suma se hacía en .1 ms y se multiplicaba en 1 ms. El TMEF había ascendido a unas 1000 hs. Se comenzaba a reemplazar tableros de instrumentos por teclado y pantallas. Ya se observa una ventaja importante: la fácil reconfiguración del sistema [2].
En 1965 comienza la era de las mini computadoras. Una mini computadora típica tenía una longitud de palabra de 16 bits, de 8 a 124k de memoria fija mas una unidad de disco. Aparecen los circuitos integrados con lo que se reducen notablemente los costos y los tamaños. Aumenta la velocidad y la fiabilidad: una suma se ejecuta en 0,002 ms y en 0,007 ms una multiplicación. El TMEF sube a 20000 hs. Ya es posible pensar en aplicar el control digital a proyectos pequeños con lo que se observa un crecimiento de las aplicaciones de 5000 a 50000 en 5 años. El costo medio de una aplicación (en 1975) es de unos 10000 dólares llegando el costo total del proyecto a 100000 dólares [2].
En 1975 hacen su aparición las microcomputadoras con un costo medio de 500 dólares y un consumo despreciable. Ahora cambia el concepto del sistema y se habla de control dedicado es decir dar a cada variable o grupo de ellas un control específico y personalizado. También en este momento se observa un gran desarrollo de la teoría de control [2].
Quizás el avance más espectacular sea en el terreno de la tecnología de los computadores. Se observan avances en varias áreas: desarrollos electrónicos en materia de integración (vlsi), en el dominio de las comunicaciones, en la presentación de la información, la aparición de nuevos lenguajes y en la arquitectura propia de los computadores [2].
En cuanto al control avanzado, la teoría de control también prevé adelantos principalmente en las áreas de identificación de sistemas, algoritmos de control, optimización, control adaptativo, control inteligente y sistemas multivariables. Pero ya nunca más se podrá despegar el futuro de esta temática al del avance de los computadores digitales [2].
1.5 Sistemas de control digital
1.5 Sistemas de control digital
1.5 Sistemas de control digital
1.5 Sistemas de control digital
Es un sistema en donde las señales en una o más partes se encuentran en forma de trenes de pulsos o códigos numéricos. Los datos muestreados son señales cuya amplitud esta modulada por pulsos y que se obtienen mediante el muestreo de las señales analógicas. Con frecuencia, la señal con amplitud modulada por pulsos está presente en la forma de tres de pulsos, dónde la información es transmitida por las amplitudes de estos [3].
1.5.1 Elementos básicos de un sistema de control
1.5.1 Elementos básicos de un sistema de control
1.5.1 Elementos básicos de un sistema de control
1.5.1 Elementos básicos de un sistema de control
digital
digital
digital
digital
frecuencia de muestreo representan los valores de la señal de entrada, justo en esos momentos.
El filtro ubicado entre el muestreador y el proceso se utiliza para suavizar la salida del primeo debido a que la mayor parte de los procesos controlados, están diseñados para recibir señales analógicas [3].
Figura 1.10 Sistema de control de lazo cerrado con datos muestreados
Figura 1.11 a) Entrada continua al muestreador b) Salida discreta del muestreador
1.5.2 Características del control digital
1.5.2 Características del control digital
1.5.2 Características del control digital
1.5.2 Características del control digital
Como características básicas del control digital se pueden mencionar las siguientes:
Facilidad de ajuste y cambio. Por el mismo motivo anterior un cambio en un control analógico implica, en el mejor de los casos, un cambio de componentes si no un cambio del controlador completo.
Exactitud y estabilidad en el cálculo debido a que no existen derivas u otras fuentes de error.
Uso de la computadora con otros fines (alarmas, archivo de datos, administración, etc.)
Costo vs. número de lazos. No siempre se justifica un control digital ya que existe un costo mínimo que lo hace inaplicable para un número reducido de variables.
Tendencia al control distribuido o jerárquico. Se ha pasado de la idea de usar un único controlador o computadora para toda una planta a la de distribuir los dispositivos inteligentes por variable o grupos de estas e ir formando estructuras jerárquicas [3].
1.5.3 Ventajas del uso de controles digitales
1.5.3 Ventajas del uso de controles digitales
1.5.3 Ventajas del uso de controles digitales
1.5.3 Ventajas del uso de controles digitales
Los sistemas de control digital presentan una serie de ventajas como son una menor susceptibilidad al deterioro debido al transcurso del tiempo o a factores del entorno, presenta unos componentes menos sensibles a los ruidos y a las vibraciones en las señales, tienen una mayor flexibilidad a la hora de programar, o poseen una mejor sensibilidad frente a la variación de parámetros. En cambio, la evolución de las computadoras y de sus capacidades de cálculo permite reducir los inconvenientes que presentan los controladores digitales.
el controlador en señales continuas, de modo que los actuadores puedan ejecutar los cambios precisos [3].
1.6 Aislante térmico
1.6 Aislante térmico
1.6 Aislante térmico
1.6 Aislante térmico
La eficiencia básica y los factores de productividad de la tubería para la industria del procesamiento incluyen la eficiencia energética y la fiabilidad bajo diferentes condiciones, además de la funcionalidad del control de proceso, una estructura adecuada que sea apta para el ambiente operativo, así como la durabilidad mecánica. El aislamiento térmico de la tubería tiene un importante papel en cumplir estos requisitos.
Las funciones del aislamiento térmico correcto de las tuberías incluyen:
• Reducción de las pérdidas de calor • Ahorros en los costes • Reducción de emisiones de CO2 • Protección contra heladas
• Control de proceso: garantizar la estabilidad de la temperatura del proceso • Reducción del ruido
• Prevención de la condensación
• Protección (personal) contra altas temperaturas
CAPÍTULO II
CAPÍTULO II
CAPÍTULO II
CAPÍTULO II
““““DESCRIPCIÓN DE LA
DESCRIPCIÓN DE LA
DESCRIPCIÓN DE LA
DESCRIPCIÓN DE LA
INSTALACIÓN
INSTALACIÓN
INSTALACIÓN
2.1
Descri
2.1
2.1
Descri
Descri
2.1
Descripción
pción
pción
pción
general
general
general
general
de
de
de
de
del
del
del
del
equipo
equipo
equipo
equipo
e
e
e
e
instrumentación
instrumentación
instrumentación
instrumentación
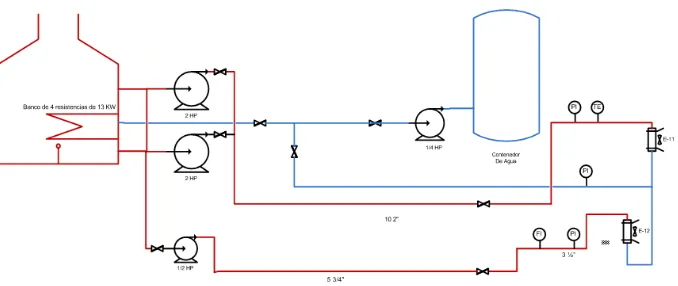
El diagrama de tuberías e instrumentación de la caldera eléctrica parte de una instalación de pruebas a intercambiadores de calor compactos se muestra en la figura 2.1, en donde las líneas de color rojo indican el paso del agua caliente por la tubería y las de color azul el paso del agua fría.
Su funcionamiento general es suministrar agua caliente a un área de pruebas físicas, calentando el agua por medio de 4 resistencias eléctricas y suministrar el agua caliente por medio de tres bombas centrifugas, la parte de llenado de la caldera esta dado por otra bomba centrifuga que succiona el agua de un tanque de almacenamiento.
El funcionamiento de la caldera es demasiado lento al obtener la temperatura que se desea, la cual es de 85 ºC con un error de 1 ºC, pero las resistencias como se encienden y se apagan de forma manual, causan una pequeña inestabilidad en el sistema, ocasionando que la temperatura del agua a la en la salida de la caldera tenga una variación considerable.
El suministro del agua caliente al intercambiador de calor proveniente de la caldera se lleva a cabo por medio de bombas centrifugas, en donde el principal problema, dependientemente del control de temperatura del agua a la salida de la caldera, es el tiempo de retardo que existe, ya que al circular el agua por medio de la tubería por una distancia aproximada de 10 m se pierde gran parte del calor, este problema se piensa corregir utilizando un aislamiento térmico en la tubería.
2.1.1
2.1.1
2.1.1
2.1.1 Si
Si
Si
Sistema eléctrico de potencia y
stema eléctrico de potencia y
stema eléctrico de potencia y control
stema eléctrico de potencia y
control
control
control
Este sistema esta compuesto por el motor eléctrico, un variador de velocidad, dos bancos de resistencias eléctricas y el panel de control, los cuales se describen a continuación.
El motor eléctrico acciona un ventilador centrífugo para proporcionar aire a la zona de pruebas, la instalación cuenta con un motor de corriente continua, con una carga de 11.5 KW (15.4 HP) de potencia, 60 Hz. De frecuencia, velocidad máxima de rotación de 3000 r.p.m. a 330 V (datos tomados de placa del motor), como se muestra en la figura 2.2.
[image:45.595.119.478.439.679.2]El motor es controlado electrónicamente por un variador de velocidad que facilita la operación del mismo, ya que es posible variar de 100 en 100 r.p.m. su velocidad.
El ventilador es de tipo centrifugo acoplado al motor, es el que produce el flujo de aire, que conducido por la tubería de conexión, entre la descarga del ventilador y la sección de pruebas llega al radiador. En la succión del ventilador se localiza un banco de resistencias eléctricas que pueden calentar el aire si así se requiere en la prueba.
Este banco de resistencias tiene un control de temperatura y, con él se puede calentar el aire desde temperatura ambiente hasta 60 ºC, como se muestra en la figura 2.3.
[image:46.595.81.507.300.568.2]
Figura 2.3 Ventilador y banco de resistencias
Estas resistencia poseen una carga de 13 KW cada una, las cuales están ubicadas en la parte inferior de la caldera aunque el gran defecto existente en este tipo de calderas es que la temperatura se eleva rápidamente si no existe ningún tipo de control, puede llegar a elevar la temperatura a mas de 90 ° C, en un tiempo demasiado corto y provocar la ebullición del agua, lo cual ya no serviría para la realización de las pruebas físicas del laboratorio, además de existir el riesgo de una explosión por la presión de vapor que existiría.
Figura 2.4 Banco de resistencias para el calentamiento del agua
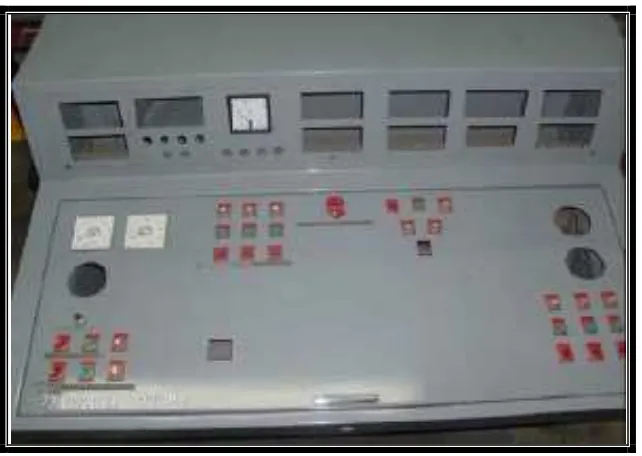
Figura 2.5 Tablero de control
2.1.2 Sistema hidráulico
2.1.2 Sistema hidráulico
2.1.2 Sistema hidráulico
2.1.2 Sistema hidráulico
El circuito hidráulico como se muestra en la figura 2.6a y 2.6b, consta de un tanque de almacenamiento, caldera eléctrica, bombas y una red de tuberías cuyo funcionamiento se describe a continuación.
Figura 2.6a Representación de la caldera y tanque de almacenamiento
[image:49.595.174.422.393.711.2]El sistema de suministro de agua caliente está dado por dos bombas conectadas en paralelo de 3450 rpm, 2 HP, con una tensión de 220- 440 V, y corriente eléctrica de 6.1 A. como se muestra en la figura 2.7.
Las cuales suministran el flujo de la caldera y lo dirigen al intercambiador de calor, este tipo de arreglo de bombas se utiliza cuando se requiere un flujo mayor a presión constante.
[image:50.595.97.500.386.703.2]Existen 2 bombas mas, una en la parte inferior de la caldera, la cual esta implementada para el uso de flujos a menor presión y posee las siguientes características: 1/ 4 HP, 127 v, 60 Hz. La última bomba solo se implementa para el llenado de la caldera, esta bomba toma el agua de un contenedor para dirigirlo a la caldera. Dicha bomba posee características: 1/ 4 HP, 127 v, 60 Hz.
En la figura 2.7 se observa que la etapa de suministro de agua caliente, la salida de agua de las bombas está controlado por válvulas de globo, esto es para regular el flujo deseado para suministrar, en el cual existe una gran pérdida de energía en las bombas, ya que estas se encuentran trabajando a su máxima capacidad cuando a veces solo se requiere un flujo menor, la válvula que se observa en la parte superior es la que se encarga de realizar la purga de las bombas.
El flujo de agua caliente que llega al intercambiador de calor es controlado manualmente por válvulas de globo, colocadas en la tubería de distribución y medido por medio de un rotámetro graduado con un rango de medición de 80 l.p.m a 280 l.p.m o de 20 g.p.m a 70 g.p.m, colocado en la entrada del intercambiador de calor, tal como se muestra en la figura 2.8.
Figura 2.8 Rotámetro en la entrada del radiador y Válvulas de globo
El fluido pasa a través de un arreglo de válvulas para regular la cantidad de flujo que entra al radiador. El fluido continua su paso, antes de internarse en el radiador, la temperatura es medida al igual que la presión, con la finalidad de monitorear y conocer a que temperatura y presión entra dicho fluido. Una vez que el fluido abandona el radiador, la temperatura y la presión es medida nuevamente; y finalmente regresa a la caldera.