ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA SECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN
“ANÁLISIS ELASTOPLÁSTICO DE ESTRUCTURAS
AGRIETADAS”
T E S I S
QUE PARA OBTENER EL GRADO DE
MAESTRO EN CIENCIAS
CON ESPECIALIDAD EN
INGENIERÍA MECÁNICA
P R E S E N T A
Ing. José Martínez Trinidad
Director: Dr. Luis Héctor Hernández Gómez
A mis padres:
Gervasio Martínez Rosales
y
Ma. Gloria Trinidad Machuca
Por todo el amor incondicional que siempre me brindan, por estar siempre conmigo. Por
ayudarme en la realización de mis metas. Porque me han servido en lugar de que yo les
sirviera.
A mis hermanos:
Francisco,
Tomás, y
Sergio
A mi cuñada y sobrino: Norma y Francisco
Gracias por tu mágica presencia, Gricelda
Al Consejo Nacional de Ciencia y Tecnología (CONACYT).
Al Instituto Politécnico Nacional (I P N).
A la Sección de Estudios de Posgrado e Investigación (SEPI) de la ESIME-IPN.
Al Dr. Luis Héctor Hernández Gómez, por su valiosa dirección, consejos y sugerencias
durante la realización de este trabajo.
A la Comisión Nacional de Seguridad Nuclear y Salvaguardias (CNSNS) y al Ing. Pablo
Ruiz López, por el apoyo brindado en la realización de este trabajo.
Al Dr. Alexander Balankin, por su apoyo y sugerencias.
A todos los sinodales, por su valiosa revisión y comentarios para la mejora de este
trabajo.
A todos los profesores de la Sección de Estudios de Posgrado e Investigación, por su
participación en mi formación profesional.
I N D I C E
INDICE DE FIGURAS ix
INDICE DE TABLAS xiii
SIMBOLOGÍA xiv
RESUMEN xvii
ABSTRACT xviii
OBJETIVO xix
JUSTIFICACION xix
INTRODUCCION 1 1. ESTADO DEL ARTE 4 1.1. Generalidades acerca de la mecánica de fractura 5 1.2. La mecánica de fractura en la evaluación del diseño estructural 6 1.3. El objeto de la mecánica de fractura 9 1.4. Evaluación de la integridad estructural 11
1.5. Tendencias recientes de la mecánica de fractura 13
1.6. Referencias 14
2. ASPECTOS TEORICOS DE MECÁNICA DE FRACTURA 16
2.1. Mecanismos de falla 17
2.1.1. Fractura dúctil 17
2.1.2. Fractura frágil 18
2.1.3. Fases de desarrollo de una grieta 19
2.2. Análisis dimensional 20
2.2.1. El teorema-ππ de Buckingham 20
2.2.2. Análisis dimensional en mecánica de fractura 22
2.3. Mecánica de fractura lineal elástica 24
2.3.1. Punto de vista atómico de la fractura 24
2.3.2. Efecto de los defectos en la concentración de esfuerzos 26
2.3.3. Teoría de balance de energía de Griffith 29
2.3.4. Razón de energía elástica liberada G 34
2.3.5.2. Carga fija y desplazamiento fijo 41
2.3.5.3. Estructuras con flexibilidad finita 42
2.3.6. Análisis de esfuerzos de grietas 43
2.3.6.1. El factor de intensidad de esfuerzos 44
2.3.6.2. Relación entre K y el comportamiento global 48
2.3.6.3. Efecto del tamaño finito 52
2.3.6.4. Funciones de peso 57
2.3.6.5. Relación entre K y G 59
2.3.7. Plasticidad en la punta de la grieta 61
2.3.7.1. La aproximación de Irwin 62
2.3.7.2. Modelo de banda de fluencia plástica (Strip Yield Model) 65
2.3.7.3. Forma de la zona plástica 68
2.3.7.4. K como criterio de falla 70
2.3.7.5. Efecto de las dimensiones del espécimen. 71
2.4. Mecánica de fractura elasto-plástica 72
2.4.1. Desplazamiento de apertura de la punta de la grieta (CTOD) 73
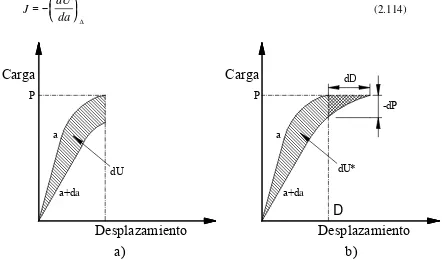
2.4.2. La integral J 77
2.4.2.1. No-linealidad de la razón de energía liberada 78
2.4.2.2. J como una integral de línea independiente de la trayectoria 81
2.4.2.3. J como parámetro de intensidad de esfuerzos 82
2.4.3. Relación entre J y CTOD 83
2.4.4. Curva de resistencia al crecimiento de la grieta 84
2.4.5. Crecimiento de grieta estable e inestable 85
2.4.6. Técnicas de estimación de la integral J 87
2.5. Referencias 89
3. ASPECTOS TEORICOS DE ANALISIS A LIMITE 93
3.1. Generalidades 94
3.2. Análisis plástico 94
3.3. Análisis general de cedencia – principios fundamentales 96
3.4. Análisis a limite de vigas 98
3.5. Criterio de cedencia. Cedencia bajo condiciones de esfuerzo plano y deformación plana 100
3.6. Articulaciones plásticas, líneas de desplazamiento y planos de deslizamiento. 103
3.8. Referencias 109
4. METODOLOGIAS PARA LA EVALUACION ESTRUCTURAL DE COMPONENTES
AGRIETADOS 110
4.1. Curva de diseño CTOD 111
4.1.1. Curva de diseño CTOD analítica 111
4.1.2. Curva de diseño CTOD empírica 113
4.2. El método R6 115
4.3. Procedimiento R6-Revision 3 118
4.3.1. Generalidades 118
4.3.2. Principios del procedimiento 119
4.3.3. Categorías de análisis y análisis de sensibilidad 121
4.3.4.Modos de falla 122
4.3.5. Categorias de carga y esfuerzos 122
4.3.6. Diagrama de evaluación de falla (FAD) 124
4.3.7. Diagrama de evaluación de falla para estructuras de acero C-Mn (Mild) 126
4.4. Método PD-6493 128
4.5. Diagrama de evaluación de falla Piecewise (PWFAD, piecewise failure assessment diagram) 130
4.6. Mecánica de fractura probabilística 132
4.7. Referencias 134
5. APLICACIÓN A CASOS DE ESTUDIO. 137
5.1. Generalidades 138
5.2. Procedimiento general 140
5.3. Recipiente horizontal con grieta axial sometido a presión interna 149
5.4. Tubo con grieta axial sometido a presión interna 155
5.5. Tubo con grieta circunferencial sometido a una carga axial y un momento flexionante 158
5.6. Recipiente horizontal HA1 con grieta axial sometido a presión interna 163
5.7. Recipiente esférico sometido a presión interna 166
5.8. Referencias 169
ANEXOS. 174
A.1. Análisis numerico del recipiente horizontal con grieta axial no pasante 174
A.2. Publicaciones 176
A.2.1. Publicación a nivel internacional 177
I N D I C E D E F I G U R A S
Figura 1.1. Comparación de la mecánica de fractura con la resistencia de materiales como propuesta
para diseño. 6
Figura 1.2. Evolución del diseño estructural. 7
Figura 1.3. Árbol simplificado de mecánica de fractura. 9
Figura 1.4. Una grieta en una estructura como un problema de ingeniería. 10
Figura 1.5. Esquema del diagrama de evaluación de falla. 13
Figura 2.1. Apariencia típica de una fractura copa-cono. 18
Figura 2.2. Placas sujetas a esfuerzos de tensión lejano. a) grieta en el borde, placa infinita; b) grieta en el borde, placa finita; c) grieta en el borde con zona plástica en la punta. 22
Figura 2.3. Estado de esfuerzos cerca de la punta de la grieta, en un material elástico. 23
Figura 2.4. Cálculo de la resistencia teórica de una grieta en materiales con comportamiento frágil. 24
Figura 2.5. Defecto elíptico en una placa. 27
Figura 2.6. Placa ancha con grieta pasante en el centro sujeta a un esfuerzo de tensión lejano. 30
Figura 2.7. Defecto circular embebido en un sólido sujeto a un esfuerzo de tensión lejano. 32
Figura 2.8. Propagación de grietas en diferentes materiales, con su correspondiente energía de fractura: A) Ideal frágil; B) Elastoplástico, cuasi-frágil; C) Material frágil con ramificación. 33
Figura 2.9. Placa agrietada sujeta a una carga fija P. 36
Figura 2.10. Placa agrietada sujeta a desplazamiento fijo. 37
Figura 2.11. Esquema de crecimiento estable predicho por las curvas G/R. a) Material frágil ideal b) Material real. 38
Figura 2.12. Gráfica de fuerza de impulso G – curva R, la cual compara los casos a) desplazamiento fijo y b) carga fija. 41
Figura 2.13. Estructura agrietada con deflexión finita, representada esquemáticamente por un resorte en serie. 42
Figura 2.14. Definición del eje de coordenadas en la punta de la grieta. 43
Figura 2.15. Modos de carga. 44
Figura 2.16. Esfuerzo normal al plano de la grieta en el modo I. 47
Figura 2.19. Comparación en la apertura de grietas para una grieta en el canto y una central. 50
Figura 2.20. Grieta central en una placa infinita para el caso general donde el esfuerzo principal no es perpendicular. 50
Figura 2.21. Modo I de intensidad de esfuerzos para grietas elípticas y semielípticas. 51
Figura 2.22. Efecto de la concentración de esfuerzos en placas de ancho finito y semi-infinito. 52
Figura 2.23. Grietas colineales en una placa infinita sujeta a un esfuerzo de tensión lejano. 52
Figura 2.24. Comparación de resultados obtenidos con el método de elemento finito con correcciones para una placa con grieta central a tensión. 54
Figura 2.25. Gráfica de soluciones de intensidad de esfuerzo de la tabla 2.4. 56
Figura 2.26. Aplicación de esfuerzos para cerrar una grieta en
∆
a
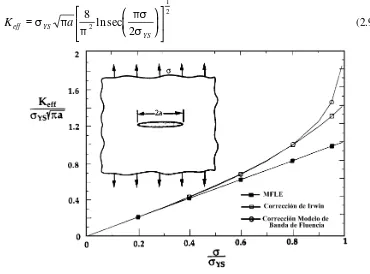
. 59Figura 2.27. Estimación de primer y segundo orden del tamaño de la zona plástica (ry y rp respectivamente) 63
Figura 2.28. La corrección de la zona plástica de Irwin. 64
Figura 2.29. Modelo de la banda de cedencia. 65
Figura 2.30. Fuerza de apertura de la grieta a una distancia xde la línea de centro. 65
Figura 2.31. Comparación de la zona plástica por tres métodos. 67
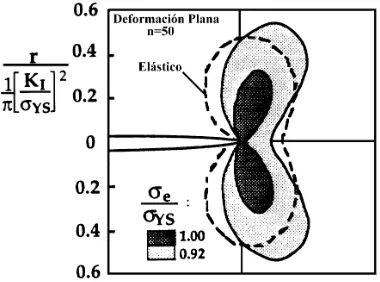
Figura 2.32. Formas de la zona plástica en la punta de la grieta. 69
Figura 2.33. Zonas de deformación plana predichas por la ecuación (97a) con una solución elastoplástica detallada obtenida por un análisis de elemento finito. 70
Figura 2.34. Efecto del endurecimiento en la zona plástica. 70
Figura 2.35. Efecto del espesor de la probeta en el modo I de resistencia a la fractura. 72
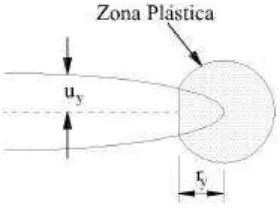
Figura 2.36. Estimación de CTOD del desplazamiento efectivo de la grieta en la zona plástica de corrección de Irwin. 73
Figura 2.37. Estimación del CTOD del modelo de banda de cedencia. 74
Figura 2.38. Definiciones alternativas del CTOD. a) Desplazamiento para la punta original de la grieta; b) Desplazamiento para la intersección de un vértice de 90º con los lados de la grieta. 75
Figura 2.39. El modelo de punto de rotación para estimar CTOD para una probeta en tres puntos de flexión. 75
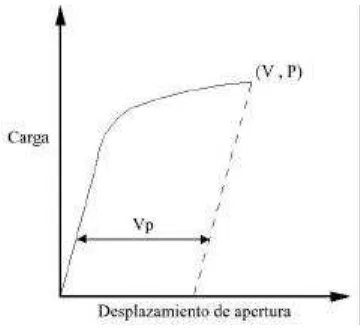
Figura 2.40. Determinación de las componentes plásticas de la apertura de desplazamiento de la grieta. 76
Figura 2.41. Esquema comparativo del comportamiento esfuerzo-deformación de materiales elastoplásticos y no-lineales-elásticos. 77
Figura 2.42. Determinación de la integral J. a) desplazamiento fijo; b) carga fija. 79
Figura 2.44. Contorno alrededor de la frontera del modelo de banda de cedencia en la punta de la
grieta. 84
Figura 2.45. Curva de resistencia J para un material dúctil. 85
Figura 2.46. Inestabilidad de J; diagrama comparativo entre carga fija y desplazamiento fijo 86
Figura 2.47. El esquema de estimación J EPRI/GE. 89
Figura 3.1. Diagrama esfuerzo-deformación de un material perfectamente plástico. 95
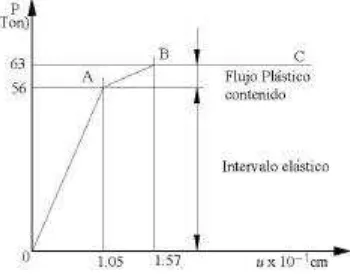
Figura 3.2. Etapas de carga de un material elastoplástico. 99
Figura 3.3. Relaciones momento-curvatura para secciones transversales de forma circular, rectangular y en I. Factor de forma k = MP/Myp. 99
Figura 3.4. a) Viga simplemente apoyada cargada en el punto medio; b) diagramas de momentos; c) mecanismo de colapso. 100
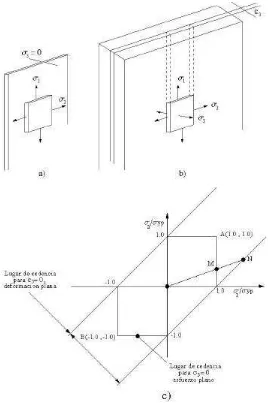
Figura 3.5. Estado de esfuerzos en una hoja delgada, condición de esfuerzo plano; b) condición de deformación plana; c) criterio de falla basado en la teoría del esfuerzo cortante máximo. 102
Figura 3.6. a) Placa cargada a tensión uniaxial; b) deslizamiento a través de los planos de corte. 103
Figura 3.7. Modelado de vigas. 104
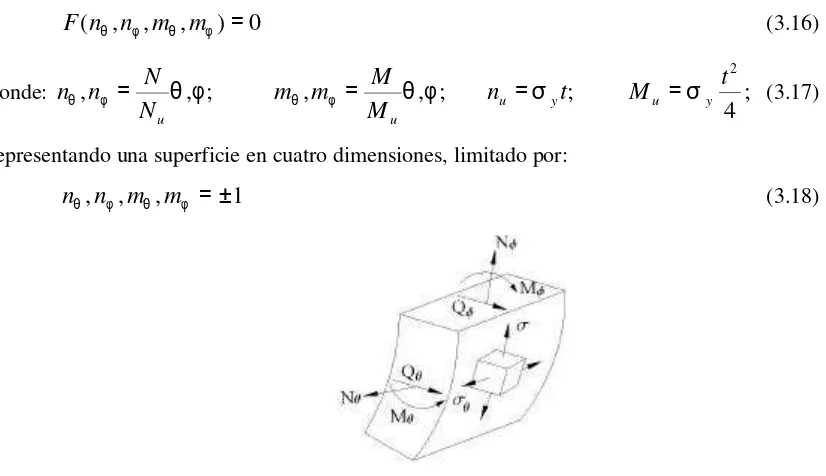
Figura 3.8. Estado de esfuerzos en un elemento de un cascarón. 105
Figura 4.1. Puntos equidistantes al centro de una grieta de longitud 2a. 112
Figura 4.2. Curva de diseño CTOD analítica. 112
Figura 4.3. Comparación de la curva de diseño analítica y experimental. 113
Figura 4.4. Esquema de las bandas de fluencia en una placa ancha. 114
Figura 4.5. Diagrama de evaluación de falla. 117
Figura 4.6. Diagrama de evaluación de falla R6 definido por tres criterios límite para evitar: fractura; colapso plástico; fractura elastoplástica. 119
Figura 4.7. Esquema del diagrama de evaluación de falla mostrando las curvas típicas de falla. 126
Figura 4.8. Diagrama de evaluación de falla para aceros C-Mn. 127
Figura 4.9. Diagrama de evaluación de falla para los niveles 1 y 2 del método PD 6493. 129
Figura 4.10. Nivel 3 del diagrama de evaluación de falla del método PD 6493; para el caso donde los datos de la curva esfuerzo deformación no están disponibles. 130
Figura 4.11. Comparación de distintos FAD utilizando baja deformación (LS), alta deformación (HS), DPFAD, PWFAD. 132
Figura 5.3. Re-caracterización de defectos para la falla del ligamento. (A) Por mecanismo frágil bajo cargas dinámicas o posible crecimiento de grieta; (B) Por mecanismo dúctil bajo
carga dinámica o posible crecimiento de grietas. 142
Figura 5.4. Evaluación de FL para una carga. 148
Figura 5.5. Esquema del recipiente horizontal. 150
Figura 5.6. Distribución de esfuerzos en la punta de la grieta. 152
Figura 5.7. Resultados de ANSYS para KI. 152
Figura 5.8. FAD Opción 1, para evaluar el recipiente horizontal. 153
Figura 5.9. Evaluación de falla utilizando la curva-J de resistencia del material (Powertech Labs Inc., PLI). 154
Figura 5.10. Esquema del tubo con grieta axial. 155
Figura 5.11. Esquema del tubo con grieta circunferencial. 158
Figura 5.12. FAD Opción 1. Para evaluar los puntos A y B para el tubo con grieta axial; y C y D para el tubo con grieta circunferencial. 162
Figura 5.13. Esquema del recipiente a presión HA1. 163
Figura 5.14. Diagrama de evaluación de falla opción 2, con categoría de análisis 3. 165
Figura 5.15. a) Recipiente esférico; b) Acercamiento a la zona de la grieta. 166
Figura 5.16. Magnetograma de la grieta en el recipiente esférico sometido a presión interna. 167
I N D I C E D E T A B L A S
Tabla 2.1. Campo de esfuerzos en la punta de la grieta para el modo I y modo II en un material
isotrópico lineal elástico. 46
Tabla 2.2. Campo de desplazamientos en la punta de la grieta para el modo I y modo II para un material isotrópico lineal elástico. 46
Tabla 2.3. Esfuerzos no iguales y componentes de desplazamiento en modo III para un material isotrópico, linela elástico. 46
Tabla 2.4. Soluciones de KI para probetas comunes de prueba. 55
Tabla 3.1. Cargas de colapso para cascarones y placas de espesor delgado. 106
Tabla 4.1. Selección del diagrama de evaluación de falla. 125
Tabla 5.1. Criterios de interacción. 143
Tabla 5.2. Recipiente horizontal. 149
Tabla 5.3. Análisis del recipiente horizontal con grieta axial. 150
Tabla 5.4. Resultados obtenidos por distintos grupos. 154
Tabla 5.5. Tubo con grieta axial. 155
Tabla 5.6. Análisis para un tubo con grieta axial. 156
Tabla 5.7. Tubo con grieta circunferencial. 158
Tabla 5.8. Análisis para un tubo con grieta circunferencial. 159
Tabla 5.9. Recipiente HA1 sometido a presión interna. 163
Tabla 5.10. Análisis para recipiente HA1 sometido a presión. 164
Tabla 5.11. Recipiente esférico. 166
SIMBOLOGÍA
MFLE – Mecánica de fractura lineal elástica. MFEP– Mecánica de fractura elasto-plástica. MFD– Mecánica de fractura dinámica. MFVE– Mecánica de fractura visco-elástica. MFVP– Mecánica de fractura visco-plástica.
ASTM - American Society for Testing and Materials. BS - British Standards Institution.
GE - General Eletric Corporation.
EPRI - The Electric Power Research Institute. CEGB - Central Electricity Generation Board.
FAD – Diagrama de evaluación de falla (failure assessment diagram).
DPFAD - Deformation plasticity failure assessment diagram. PWFAD - Piecewise failure assessment diagram.
R6 – Método R6
KI - Factor de intensidad de esfuerzos, para el modo de carga I.
KII - Factor de intensidad de esfuerzos, para el modo de carga II.
KIII - Factor de intensidad de esfuerzos, para el modo de carga III.
G - Razón de energía elástica liberada.
R - Curva de resistencia al crecimiento de grieta.
CTOD - Desplazamiento de apertura de la punta de la grieta (Crack Tip Opening Diplacement). J - La integral J
E - Módulo de Young.
ν - Relación de Poisson.
σij - Tensor de esfuerzos
εij - Tensor de deformación
a -Longitud de la grieta.
r - Distancia al que se encuentra el estado de esfuerzos a determinar.
θ
- Ángulo al que se encuentra el estado de esfuerzos a determinar.∏
∏0 - Energía elástica de la placa sin grieta (constante).
∏
∏ - Cambio en la energía elástica causado por la introducción de la grieta en la placa.
F – Trabajo desarrollado por fuerzas externas.
γ
s - Energía de superficie del material.p
γ
- Trabajo plástico por unidad de superficie creadaf
w
- Energía de fractura, la cual puede incluir efectos de plasticidad, viscoelasticidad, o viscoplasticidad,los cuales dependen del material
Y - Constante dimensional que depende de la geometría y el modo de carga.
W – Ancho de probeta. B – Espesor de la probeta. P – Carga.
SENT - Probeta con grieta a un lado a tensión. SENB - Probeta con grieta a un lado a flexión. CCT - Probeta con grieta en el centro a tensión. DENT - Probeta con grieta en ambos lados a tensión.
Γ - Perímetro del cuerpo
A - Área del cuerpo
ui - Desplazamientos en la direcciones X y Y.
Qeff - Parámetro de forma efectiva.
aeff – Longitud efectiva de la grieta.
ry – Estimación de primer orden, corrección aproximada de la zona plástica.
rp – Estimación de segundo orden, corrección aproximada de la zona plástica.
σ1, σ2, σ3- Esfuerzos principales. w - Densidad de energía de deformación Ti - Componentes del vector de tracción
ui - Componentes del vector desplazamiento
ds – Elemento diferencial de la trayectoria cerrada, Γ. nj - Componentes del vector unitario normal a Γ.
σ0 - es un valor de esfuerzo llamado de referencia, usualmente es el esfuerzo de cedencia.
α - Constante adimensional
n – Coeficiente de endurecimiento.
In - Constante de integración que depende de n
YS
ε
- Deformación en el punto de cedencia.Sr - Relación de esfuerzos.
Kr - Relación del factor de intensidad de esfuerzos. y
σ
- Esfuerzo de cedencia (límite inferior), es el obtenido con el 0.2% en una prueba a tensión uniaxial.u
σ
- Esfuerzo de tensión último obtenido de la curva esfuerzo deformación de ingeniería de una prueba atensión uniaxial.
σ
- Esfuerzo de fluencia o el nivel de esfuerzo en el material el cual controla la resistencia del cuerpo agrietado para falla por un mecanismo de colapso plástico. El valor del esfuerzo de fluencia puede sertomado como 21
(
)
u y
σ
σ +
, excepto cuando se puedan justificar valores más altos.P
σ
- Esfuerzos debidos a cargas las cuales contribuyen al colapso plásticoS
σ
- Esfuerzos debidos a cargas las cuales no contribuyen al colapso plásticoref
ε
-Deformación uniaxial real a tensión.ε0 = σ0/EIC
K
- Tenacidad a la fractura, en condición de deformación plana, lineal elástica, para el inicio de lafractura frágil, de acuerdo a los requerimientos estipulados en BS 5447 y ASTM E399 [5.3, 5.4].
C
K
- Tenacidad a la fractura para el inicio de la fractura frágil donde los requerimientos de BS 5447 yASTM E399 no son cumplidos.
2
− O
K
- La tenacidad a la fractura después de 0.2 mm de extensión de la grieta. Este valor de tenacidadprovee una buena aproximación de ingeniería de tenacidad a la fractura para su uso en la evaluación estructural basado en el inicio de la grieta.
g
K
- La tenacidad a la fractura después de una limitada cantidad de desgarramiento dúctil∆
a
g.)
(
a
K
Ω∆
- La tenacidad a la fractura después de una cantidad dada de desgarramiento dúctil∆
a
. EstaRESUMEN
ABSTRACT
OBJETIVO
Realizar la evaluación de la integridad estructural de componentes, que presentan un defecto caracterizado o modelado como grieta mediante una metodología que considere la interacción de los estados límites de fractura y colapso plástico, mediante un criterio cuantitativo, gráfico, relativamente sencillo, el cual permite tomar la decisión entre reparar, eliminar o mantener en servicio un componente hasta el siguiente paro programado.
Éste trabajo se propone ser utilizado por la Comisión Nacional de Seguridad Nuclear y Salvaguardias en la evaluación de la integridad estructural de componentes presentes en la Central Nuclear Laguna Verde.
JUSTIFICACIÓN
La Comisión Nacional de Seguridad Nuclear y Salvaguardias (CNSNS) como un organismo encargado de regular el adecuado funcionamiento de la Central Nuclear de Laguna Verde, en su posición técnica AOO.110.386/98, plantea la necesidad de realizar la evaluación de la integridad estructural de componentes cuando presenten un defecto caracterizado o modelado como grieta, mediante alguna metodología, que considere simultáneamente los estados límites de fractura y carga límite de colapso plástico.
INTRODUCCIÓN
La demanda global de energía, particularmente la eléctrica, está creciendo conforme al incremento de la población y la economía de los países. Una estimación conservativa del Consejo Mundial de Energía
proyecta que la demanda global de electricidad se triplicará en los próximos 50 años [I.1]. El desafío global, por lo tanto, es desarrollar estrategias que fomenten un futuro sostenible de energía que dependa menos de fuentes fósiles, no renovables. Las opciones de energía para el futuro necesita tomar en cuenta metas e itinerarios para reducir las emisiones de dióxido de carbono. Y para muchos países, la diversificación de fuentes de energía, será una prioridad nacional.
Debido al cambio climático y el calentamiento global, los países industrializados han acordado bajar sus emisiones contaminantes de gases que producen el efecto invernadero. Cabe señalar que la energía producida por medio de combustibles fósiles representa la mitad de dichas emisiones producidas por el hombre. Mientras existen muchas esperanzas por tener fuentes de energía limpias, el hecho es que solo a excepción de la energía hidroeléctrica (la cual tiene limitado crecimiento potencial) y nuclear, no hay alguna otra económicamente viable, que presente mínimas emisiones de gases que producen efecto invernadero, para grandes escalas de generación de energía. Es más, algunos estudios realizados por el Consejo Mundial de Energía indican que incluso con investigaciones y subsidios substanciales, fuentes alternas de energía que actualmente se considera suministran el 1% de la energía eléctrica global, podrían crecer no más del 3 – 6 % para el año 2020.
En 1998 existían 434 reactores nucleares en operación en 31 países, proporcionado alrededor del 16% de la energía eléctrica en el ámbito mundial, evitando el 8% de las emisiones de carbono. La experiencia de operación acumulada rebasa los 9000 años reactor. Además, se encuentran en fase de construcción 62 nuevas plantas. En México la Comisión Federal de Electricidad (CFE) cuenta con la Central Nuclear de Laguna Verde (CNLV) la cual cuenta con dos unidades en operación [I.2], y como organismo regulador la Comisión Nacional de Seguridad Nuclear y Salvaguardias (CNSNS).
Es en referente a la seguridad nuclear, donde es de vital importancia contar con métodos confiables de evaluación de las condiciones, bajo las cuales un defecto tipo grieta, presente en cuerpo de configuración geométrica conocida (tubería, recipiente) y con la influencia de un determinado sistema de carga comienza a propagarse y se torna eventualmente inestable. Permitiendo decidir entre reparar, eliminar o continuar en servicio un sistema hasta el siguiente paro programado. El proceso normal de envejecimiento de la CNLV llevará en el futuro a tener casos donde se presenten defectos de dicha naturaleza.
La CNSNS en su posición técnica AOO.110.386/98 [I.3] plantea la necesidad de realizar la evaluación de la integridad estructural de componentes, cuando presenten un defecto caracterizado o modelado como grieta, mediante alguna metodología, que considere simultáneamente los estados límites de fractura y carga límite de colapso plástico.
Por tal motivo, el objetivo de este trabajo, es realizar la evaluación de la integridad estructural de componentes que presenta un defecto caracterizado o modelado como grieta, mediante una metodología que considere la interacción de los estados límites de fractura y colapso plástico, mediante un criterio cuantitativo, gráfico, relativamente sencillo, que permite la toma de decisión entre reparar, eliminar o mantener en servicio un componente hasta el siguiente paro programado.
De acuerdo a lo anterior, el trabajo queda dividido de la siguiente manera, en el capítulo 1 se presenta el estado del arte, donde se plantea aspectos generales acerca de la mecánica de fractura, así como una semblanza de la mecánica de fractura la cual es una parte del diseño estructural y su uso en la evaluación de la integridad de estructuras. Además, se plantea de manera breve el desarrollo que la mecánica de fractura ha tenido a través de los años y su paso de ser solo una base teórica a formar parte importante de aplicaciones.
entre la falla por fractura y por colapso plástico. Y en el capítulo 5 se presenta la aplicación del método R6/RH/Rev.3 a distintos casos de estudio. Los resultados obtenidos son utilizados en la evaluación de la integridad estructural de componentes.
Finalmente, cabe mencionar, que este trabajo forma parte del proyecto de investigación aprobado por CONACyT 3741 “Análisis de Mecánica Avanzada Aplicada a los Principales Componentes de Centrales Nucleares Relacionados con Seguridad”. Además de formar parte de un cúmulo de trabajos resultado del convenio de colaboración existente entre la Comisión Nacional de Seguridad Nuclear y Salvaguardias con la Sección de Estudios de Posgrado de la ESIME del IPN.
REFERENCIAS
[[I.1]] International Atomic Energy Agency, http://www.iaea.org/worldatom/, 1999.
[[I.2]] Comision Federal de Electricidad, http://www.cfe.gob.mx/internacional/lagver/, 1999.
[[I.3]] AOO.110.386/98., “Posición Técnica Sobre el Uso de la Mecánica de Fractura en la CNLV
CAPÍTULO 1
ESTADO DEL ARTE.
1.1. Generalidades Acerca de la Mecánica de Fractura.
La fractura es un problema, que la sociedad tiene desde cuando el hombre decide construir estructuras. El problema, hoy en día, puede ser mayor que en los siglos anteriores, debido a la complejidad tecnológica existente en la actualidad.
Hay dos puntos importantes a ser considerados en el diseño tradicional de una estructura de ingeniería. El primero, es un análisis de esfuerzos del problema, es decir que la magnitud y dirección de los esfuerzos y deformaciones para distintos puntos importantes de la estructura sean conocidos. El segundo, es seleccionar un criterio de falla de acuerdo al tipo de material utilizado en cada elemento de la estructura. La forma tradicional, es diseñar la sección de área del elemento estructural de tal manera, que los esfuerzos aplicados estén por abajo del esfuerzo de cedencia del material. Tal aproximación es adecuada para aleaciones de baja y mediana resistencia, se considera que el material es continuo y libre de defectos mecánicos. Como es conocido actualmente, el criterio anterior no puede describir de manera adecuada la falla de aleaciones de alta resistencia, debido a la sensibilidad a la presencia de defectos mecánicos inherentes en el material.
La presencia de una grieta en un componente estructural implica la pérdida de continuidad del material y por ende la disminución de la resistencia del mismo. La mecánica de fractura, es una herramienta analítica con la cual se puede introducir el efecto de una grieta en el cálculo de la resistencia de un componente, la magnitud de deformaciones máximas, bajo ciertas condiciones la vida remanente de un componente. La mecánica de fractura incluye el análisis matemático del proceso de fractura, que comprende nucleación, crecimiento y la separación o fragmentación. Es de especial interés la fase de crecimiento estable, en la que dicho crecimiento puede detenerse si los esfuerzos disminuyen o desaparecen; además, determina el momento de inicio de la etapa inestable, lo cual representa la vida restante de un componente. En la mecánica de fractura se presentan dos alternativas de análisis, (1) basándose en el cálculo del campo de esfuerzos alrededor de una grieta (intensidad de esfuerzos) y (2) en los cambios de energía almacenada, que tienen lugar durante el proceso de agrietamiento y fractura (criterio de energía).
tamaño de grieta o defecto, y la tenacidad a la fractura, que reemplaza a la resistencia como la propiedad de material relevante. Además, cuantifica las combinaciones críticas de las tres variables.
a) Resistencia de materiales
b) Mecánica de Fractura
Figura 1.1. Comparación de la mecánica de fractura con la resistencia de materiales como propuesta para diseño.
La mecánica de fractura, es una disciplina en continuo crecimiento, los nuevos conceptos y técnicas, que seguramente en los años próximos están por venir, pueden ser mejor entendidos si uno tiene una apreciación de los orígenes de la misma. De acuerdo a esto, a continuación se presenta una breve semblanza de su desarrollo.
1.2. La Mecánica de Fractura en la Evolución del Diseño Estructural.
Como se aprecia en la figura 1.2. la evolución del diseño estructural para incluir la mecánica de fractura ha precedido de una serie de fases. En los primeros trabajos de diseño (los puentes Romanos, las catedrales de Europa) se procedía esencialmente a prueba y error. Esto fue así hasta el desarrollo de los primeros conceptos de esfuerzo - deformación y su incorporación en la teoría matemática de elasticidad durante el
siglo XIX, donde procedimientos de diseño cuantitativos estuvieron disponibles. La aplicación de los conceptos de elasticidad para determinar la resistencia de un material se muestra en una segunda fase en la cronología. Después se presentó la extensión lógica de esas ideas para tratar la concentración de esfuerzos, sin embargo se llegaba a un dilema –la existencia de un comportamiento singular y de esfuerzos
infinitos-situación que fue resuelta con la invención de la mecánica de fractura.
En una tercera etapa, se muestra el resultado desarrollado por Inglis [1.1], en los primeros años de este siglo, al obtener la concentración de esfuerzo en un agujero elíptico presente en una placa a tensión
Esfuerzo de Cedencia Esfuerzo aplicado
Esfuerzo aplicado
agujero, con un esfuerzo lejano o nominal,
σ
nom. Como se puede apreciar esta relación depende de la razón de a , la mitad de la longitud de la grieta, conρ
, que es el radio de curvatura para el punto deinterés. Cabe señalar que para un agujero circular, donde a =
ρ
,σ
=
3
σ
nom. Pero cuandoρ
= 0 parauna grieta afilada, se presenta un esfuerzo que tiende al infinito.
Figura 1.2. Evolución del diseño estructural.
La paradoja planteada por Inglis fue resuelta por Griffith [1.2] en un trabajo realizado con fibra de vidrio alrededor de 1920. No obstante, trabajos de otros investigadores también contribuyeron
subsecuentemente, por ejemplo Westergaard [1.3]. La fractura mecánica permaneció por un tiempo, como una curiosidad científica, lo cual ocasionó la no-penetración de la mecánica de fractura en la ingeniería de diseño. Una de las razones fue la no-aplicabilidad de la teoría de Griffith a materiales de ingeniería. Como
Adaptación empírica de diseños previamente exitosos
Resistencia de Materiales: Teoría de Elasticidad con Grandes Factores de Seguridad
Reconocimiento de la Concentración de Esfuerzo:
+
=
σ
1
2
(
/
ρ
)
12σ
noma
Uso de Mecánica de Fractura en la determinación de: Tamaño tolerable de una grieta bajo una carga o carga
de operación segura para una grieta dada mediante el uso de la MFLE.
IC
K
w
a
K
(
,
σ
,
)
=
Tolerancia de Daño, basada en la estimación de la razón de crecimiento de la grieta, para un tamaño crítico en servicio.
es conocido, la Segunda Guerra Mundial marcó un parte aguas en el desarrollo de la ciencia, y es durante ésta, cuando se presentan casos severos de fractura como fue en los barcos Libertad, en la cubierta de misiles y otras estructuras, lo cual renueva el ímpetu al estudio de la mecánica de fractura. En los Estados Unidos de América, el desastre del transbordador espacial Challenger fue un estímulo adicional. Lo anterior da un mayor realce a la contribución hecha por Irwin [1.4], cuando generaliza las ideas de Griffith, para aplicarlas a metales y otros materiales de ingeniería, idea que fue sugerida independientemente por Orowan [1.5].
El paso siguiente fue establecer la relación entre el factor de intensidad de esfuerzos con el balance de energía propuesto por Griffith, trabajo desarrollado por Irwin. Estableciendo así, la terminología Irwin-Griffith o de la Mecánica de Fractura Lineal Elástica, representado como la cuarta fase en la figura 1.2.
La quinta fase representada en la figura 1.2, representa una actividad que se ha desarrollado apenas en los últimos años. Ésta, considera un reconocimiento explícito de que las grietas están presentes en cualquier estructura de ingeniería, a) debido a defectos originales del material, b) defectos de fabricación o c) de las condiciones de servicio. Debido a que las pruebas no-destructivas (Nondestructive evaluation, NDE) se han perfeccionado y hecho intensivas en su aplicación, la integridad de estructuras debe ser dirigida a tomar en cuenta la presencia de las grietas. Por lo tanto, la evaluación de la integridad estructural se logra con la combinación de NDE y cálculos de fractura mecánica, éstos (1) asumen un tamaño inicial de grieta, (2) estiman la razón de crecimiento subcrítico (por ejemplo: fatiga, esfuerzos por corrosión) y (3) determinan el tamaño crítico de grieta para el punto de fractura inestable. El cálculo de la razón de crecimiento entonces nos permite programar intervalos de inspección para detectar cuando la grieta a alcanzado un tamaño crítico, lo anterior contribuyendo a evitar los paros no programados.
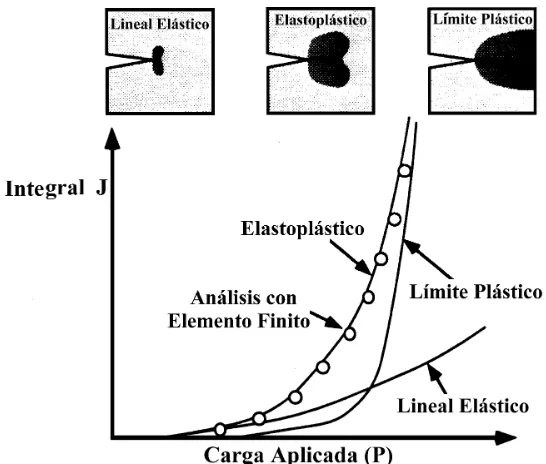
cuasiestáticas, incorporan otros tipos de comportamiento de material. Dentro de dichas ramas se encuentra la mecánica de fractura elastoplástica (MFEP), donde se considera a materiales con comportamiento no lineales, tomando en cuenta la deformación plástica bajo condiciones cuasiestáticas. Además, otras como la mecánica de fractura dinámica (MFD), la mecánica de fractura viscoelástica (MFVE) y la mecánica de fractura viscoplástica (MFVP), las cuales consideran al tiempo como variable. La línea punteada entre la MFLE y MFD en la figura 1.3, es porque en algunas investigaciones se considera el comportamiento dinámico lineal elástico.
Figura 1.3. Árbol simplificado de mecánica de fractura.
Finalmente, es importante señalar que la mecánica de fractura ha tenido un desarrollo rápido, de una gran base teórica, a importantes aplicaciones prácticas en los campos de diseño de componentes, inspección de servicio y uso seguro de materiales.
1.3. El Objeto de la Mecánica de Fractura.
El problema fundamental de la mecánica de fractura es proveer respuestas cuantitativas a problemas concernientes a estructuras agrietadas. Como es la predicción de las condiciones bajo las cuales una fisura, en un cuerpo de configuración geométrica conocida y con la influencia de un determinado sistema de cargas, comienza a propagarse y se torna eventualmente inestable. Donde la determinación de tales
MECÁNICA DE FRACTURA ELASTOPLÁSTICA
MECÁNICA DE FRACTURA
DINÁMICA
MECÁNICA DE FRACTURA VISCOELÁSTICA
MECÁNICA DE FRACTURA VISCOPLÁSTICA MECÁNICA DE FRACTURA
LINEAL ELÁSTICA
Materiales Lineales Independientes del tiempo
Materiales No Lineales Independientes del tiempo
Materiales Dependientes
condiciones tiene como requisito el conocimiento de las propiedades fractomecánicas del material en cuestión, a través de sus parámetros característicos de mecánica de fractura.
El esfuerzo residual de una estructura en la cual esté presente una grieta, decrece con el incremento en el tamaño de la grieta (figura 1.4), dicho incremento puede darse por diversos motivos (por ejemplo: fatiga, corrosión) y puede progresivamente crecer rápidamente. Después de un tiempo, la longitud de la grieta puede ser de un tamaño tal que el esfuerzo residual, el cual está en función del tamaño de grieta, pueda ser tan bajo que la estructura puede fallar estando en servicio. Por lo tanto, la mecánica de fractura intenta proporcionar respuestas cuantitativas a las siguientes interrogantes:
1) ¿Cuál es el esfuerzo residual en función del tamaño de la grieta?
2) ¿Que tamaño de grieta puede ser tolerado bajo condiciones de servicio, es decir, cual es el
tamaño máximo permisible de la grieta?
3) ¿Cuánto tiempo pasa para que una grieta de un tamaño inicial crezca, por ejemplo, de un
tamaño mínimo detectable a un máximo permisible?
4) ¿Cual es la vida de servicio de una estructura cuando se asume la existencia de ciertas grietas o defectos pre-existentes (ejemplo: defectos de manufactura) o cuando se ha detectado la grieta?
5) Durante el periodo disponible para la detección de la grieta, ¿Qué tan frecuente puede ser
inspeccionada para la detección de grietas?
Para realizar con validez y exactitud un análisis, será importante tener muy en cuenta: la precisión con que han sido determinados los parámetros fractomecánicos, así como la magnitud y modo de aplicación de las cargas, por lo que éstos, deben de ser lo más aproximado posible a las condiciones que el material presentará en el elemento estructural real. Por tanto será necesario contar con lo siguiente:
• Conocimiento de los elementos mecánicos aplicados.
• Conocimiento del tamaño y forma del defecto.
• Conocimiento claro de las propiedades mecánicas y de fractura del material.
La justificación de la mecánica de fractura en ingeniería de estructuras y máquinas pueden ser muy variadas, pero la principal es el axioma de que toda estructura posee de manera intrínseca fisuras, vacíos, imperfecciones, etc., debido a defectos en los componentes, problemas en su operación e imprevistos.
Debido a la presencia de una grieta en un componente estructural, será importante cuantificar el costo por reemplazo o arreglo más el costo derivado al detener la producción. Anteriormente, al detectar una grieta en un componente se procedía al retiro o reparación del mismo para mantener las condiciones de seguridad; actualmente, esto a cambiado debido a requerimientos económicos, de protección, aunado a los avances tecnológicos. Los factores más importantes, que propiciaron el cambio, son: el perfeccionamiento de las pruebas no destructivas y que la presencia de una grieta no implica que el componente halla alcanzado el fin de su vida útil o que esté cerca de él, o que represente un peligro.
1.4. Evaluación de la Integridad Estructural.
Como habíamos mencionado, en los años anteriores ha venido creciendo el interés en la aplicación de la mecánica de fractura para realizar la evaluación cuantitativa de la integridad de estructuras. Y es en la
posición técnica AOO.110.386/98 emitida por la CNSNS [1.6] sobre el uso de la mecánica de fractura en la CNLV-1 y 2 para la evaluación de la integridad estructural de componentes cuando poseen algún defecto o indicación que sea modelado o caracterizado como grieta, donde se recomienda realizar dicha evaluación con cálculos donde se estudien simultáneamente los aspectos frágiles y dúctiles.
En la misma posición técnica [1.6] se hace una revisión a la normativa de la USNRC (U. S. Nuclear
- El Código ASME Secc. XI [1.7], en su parte IWB-3610, inciso (a) proporciona dos criterios de aceptación basados en el tamaño del defecto y en el Factor de Intensidad de Esfuerzos, y en el inciso (b) pide que se revisen los esfuerzos primarios por ASME Secc. III para el ligamento (sección transversal no agrietada sobre el plano de la grieta, a veces denominada sección neta de colapso plástico); sin embargo, no proporciona suficientes detalles ni es muy explícito.
- La USNRC Carta Genérica 90-05, sólo da un criterio para tuberías clase-3, con grietas
pasantes, donde se obtiene el Factor de Intensidad de Esfuerzos KI con base en el
NUREG/CR-4572; aquí no se estudia el ligamento [1.8].
- LA USNRC Guía Reguladora 1.147 proporciona un listado de los casos de Código
ASME Secc. XI aceptables para la USNRC. Los casos de Código que utilizan la Mecánica de Fractura son el N-463 y el N-494, sin embargo en éstos no se explica
suficientemente su uso y limitaciones [1.9].
Por lo tanto, dado que la normativa vigente de la USNRC no establece una metodología que direccione suficientemente el uso de la Mecánica de Fractura, se concluye que existe la necesidad de una Posición Técnica, donde se requiere entre otras cosas, que la evaluación de la integridad estructural de componentes se realice mediante alguna metodología que considere simultáneamente los estados límites de fractura y carga de colapso plástico.
En este sentido, es en 1976 cuando se da la mayor contribución a las técnicas disponibles, cuando The
Central Electricity Generation Board, UK [1.10] publica una metodología para realizar dicha evaluación, en función de proveer un método gráfico relativamente sencillo (a través de un diagrama) para determinar la integridad de estructuras; esta metodología vino a ser conocida como el procedimiento o método “R6”, lo anterior debido al número del documento en el cual fue descrito. El método R6 toma en cuenta la posibilidad de falla por colapso plástico y por fractura, además de que se presenta en un formato sencillo práctico en su uso, diagramas de evaluación de falla (failure assessment diagram, FAD). Este procedimiento ha sido objeto de distintas revisiones y estudios en los pasados 23 años.
Aunque el método R6 fue desarrollado originalmente para componentes de acero en la industria nuclear y
recientemente incluido en el ASME Sección XI, Código de Caso N-494 [1.11], actualmente esta
en concordancia con los requerimientos de Nuclear Installation Inspectorate (NII). Dentro de las
aplicaciones típicas del método R6 [1.16] podemos encontrar en el Prototype Fast Reactor, UK (Tubería secundaria de sodio, intercambiadores de calor, la estructura que soporta el núcleo); Reactor MAGNOX, Advanced Gas Cooled Reactor (AGR) y el Sizewell BPWR. En Abril de 1996 el método R6 paso a formar parte de Structural Integrity Assessmente Procedures for European Industry [1.17].
El método R6, está basado en un diagrama de evaluación de falla, que consiste en ejes, Sr y Kr, (una relación de esfuerzos y la relación del factor de intensidad de esfuerzos), y una curva de evaluación de falla. El método requiere de la evaluación de puntos que son graficados sobre un diagrama de evaluación de falla, la localización de dichos puntos dentro del diagrama depende de la carga aplicada, el tamaño del defecto, las propiedades del material, entre otras. El criterio de aceptación de algún análisis, es que el punto evaluado caiga dentro del área delimitada por los ejes y la curva de evaluación de falla.
Figura 1.5. Esquema del Diagrama de Evaluación de Falla.
1.5. Tendencias Recientes de la Mecánica de Fractura.
de plasticidad en estructuras. Además de que la mecánica de fractura puede ser utilizada en la caracterización de materiales compuestos.
Otra tendencia en recientes investigaciones es el desarrollo de modelos microestructurales para fractura y modelos que relacionan el comportamiento de fractura local y global de materiales. Un tópico interesante es el empeño por caracterizar y predecir la tenacidad de la fractura en función de la geometría de la grieta, mecánica de la fractura fractal [1.18].
1.6. REFERENCIAS.
[[1.1]] Inglis, C. E., “Stresses in a Plate Due to the Presence of Cracks and Sharp Corners”. Transaction of the Institute of Naval Architects, Vol. 55, 1913, pag. 219-241.
[[1.2]] Griffith, A. A., “The Phenomena of Rupture an Flow in Solids”. Philosophical Transactions, Series A, Vol. 221, 1920, pag. 163-198.
[[1.3]] Westergard, H. M., “Bearing Pressures and Cracks.” Journal of Applied Mechanics, Vol. 6, 1939, pag. 49-53.
[[1.4]] Irwin,G. R., “Analysis of Stresses and Strains near the End of a Crack Traversing a Plate.” Journal of Applied Mechanics, Vol. 24, 1957, pp. 361-364.
[[1.5]] Orowan, E., “Fracture and Strength of Solids”. Reports on Progress in Physics, Vol. XII, 948, pag. 185-232.
[[1.6]] AOO.110.386/98., “Posición Técnica Sobre el Uso de la Mecánica de Fractrura en la CNLV”, Comisión Nacional de Seguridad Nuclear y Salvaguardias. Noviembre, 1998.
[[1.7]] Codigo ASME Boiler and Pressure Vessels Section XI, Div.1, Edición 1986.
[[1.8]] U.S. Nuclear Regulatory Commission Generic Letter 90-05 “Guidance for Performing Temporary
Non-Code Repair of ASME Code Class 1, 2 and 3 Piping”
[[1.9]] Code Case ASME XI, Div. 1: N-436 “Alternative Methods for Evaluation of Flaws in Austenitic
[[1.11]] Code Case N-494-3, “Pipe Specific Evaluation Procedures and Acceptance Criteria for Flaws in Class 1 Ferritic Piping that Exceed the Acceptance Standards of IWB-3514.2 and in Class 1 Austenitic Piping that Exceed the Acceptance Standards of IWB-3514.3 Section XI, Division 1.”
[[1.12]] Bucheheim, G. M., Osage, D. A., Prager, M., y Waker, W. R., “Fitness-for-Service and
Inspection for the Petrochemical Industry.”ASME PVP-Vol. 261, pag. 245-256. 1993.
[[1.13]] Chell, G. G., McClung R. C., y Russell, D. A., “Proof Test Analysis: State of the Art” Conference on Advanced Earth-to-Orbit Propulsion Technology, NASA, Marshall Space Flight Center, AL. May 1994.
[[1.14]] PD6493, “Guidance Methods for Assessing the Acceptability of Flaws in Fusion Welded
Structures”, British Standards Institution, 1991.
[[1.15]] R6, “Assessment of the Integrity of Integrity of Structures Containing Defects”, Milne I., Ainsworth R. A., Dowling A. R., and Stewart, A. T., Central Electricity Generation Board, United Kingdom, CEGB Report R/H/r6-Revision 3.
[[1.16]] David Green, Brain D. Daniels y Robert A. Ainsworth, “Application of the R6 Failure
Assessment Diagram to UK Nuclear Plant Assessment”, ASME PVP-Vol. 323, Fatigue and Fracture Vol.1. pag. 27-31. 1996.
[[1.17]] D. C. Connors, “R5/R6 Newsletter” Magnox Electric, Berkeley Centre, U.K. Number 13. July 1996.
CAPÍTULO 2
ASPECTOS TEÓRICOS DE
MECÁNICA DE FRACTURA.
Se establecen los conceptos básicos de mecánica de la fractura, por medio de sus parámetros característicos, se inicia en el planteamiento de Griffith hasta llegar a la
integral “J”. Este capítulo se divide en dos grandes
2.1. Mecanismos de Falla.
Se toma como definición, que Fractura es la separación de un cuerpo, ya sea por fuerzas químicas o físicas, en dos o más partes, resultando la nueva formación de superficies. Existen muchos mecanismos que ocasionen la fractura, los cuales dependerán de: la naturaleza del material, del esfuerzo aplicado, las condiciones térmicas, velocidades o índices de deformación y otros factores del medio ambiente. Un modo conveniente de estudiar el fenómeno de la fractura es el considerar los factores o condiciones que las originan. De manera general, las fracturas pueden clasificarse por presentar características dúctiles o frágiles; aunque puede presentarse una mezcla entre ambas. No obstante, el término de tenacidad es utilizado para describir la capacidad de un material de deformarse plásticamente y absorber energía antes y durante la ruptura; en consecuencia, los adjetivos dúctil y frágil son utilizados para distinguir fallas o materiales caracterizados por su baja o alta tenacidad. Otras clasificaciones de fractura conocidas son: fractura por fatiga, corrosión bajo esfuerzo y termofluencia.
2.1.1. Fractura Dúctil.
Se produce después de una deformación plástica intensa y se caracteriza por una lenta propagación de la grieta con un consumo considerable de energía, se conoce también como fractura por esfuerzo cortante. Se pueden reconocer tres estados o fases diferentes en la fractura dúctil en una probeta fracturada en un ensayo a tensión: (1) la muestra forma un cuello o garganta; (2) las cavidades del cuello coalescen en una grieta en el centro de la muestra y se propagan a lo largo de la superficie en dirección perpendicular a la tensión aplicada; (3) cuando la grieta se acerca a la superficie, la dirección de la grieta cambia 450 con
respecto al eje de tensión y da lugar a una fractura conocida como de cono y copa.
Cuando la fractura copa es vista desde arriba, presenta una apariencia fibrosa y observando la sección longitudinal la grieta central presenta un contorno de zig-zag como si hubiera sido producida por un corte o cizallamiento entre diversos huecos. La fractura cono es una región de cizallamiento altamente localizada, debido al deslizamiento de granos, y que al propagarse rápidamente por cizallamiento se produce un apreciable calentamiento localizado.
esto es debido a un cambio rápido o una inestable propagación de la grieta; C) Labios de corte, es un área anular plana adyacente a la superficie libre. La cantidad relativa de las tres diferentes regiones esta en función del estado de esfuerzos, del material y condiciones de temperatura.
Figura 2.1. Apariencia típica de una fractura copa-cono.
2.1.2. Fractura Frágil.
Cursa según los planos cristalográficos característicos, llamados planos de escisión y conlleva una rápida propagación de la fisura. Bajas temperaturas e incrementos pronunciados en deformaciones, además de un estado triaxial de tensiones, favorecen la fractura frágil. Esta puede presentar patrones de comportamiento característicos como pueden ser: Chevron, Marcas de pluma ó Abanico. En fracturas frágiles lo que se conoce como crecimiento estable de la grieta se da en un rango aproximado de 610 cm/s, mientras que el crecimiento inestable puede aparecer en un rango muy amplio de varios miles cm/s. Requiere de un consumo menor de energía y debido que presenta una ruptura repentina se ha puesto especial interés en su estudio, generalmente son de forma catastrófica.
2.1.3. Fases del Desarrollo de una Grieta.
Anteriormente se señalo, una fractura se producirá como consecuencia de la aparición de una grieta; que cuando aparece en una estructura se presenta como una discontinuidad, consecuentemente los desplazamientos y deformaciones serán mayores, generándose concentración de esfuerzos en el extremo de la grieta y presentando una deformación localizada mayor a la deformación global. Por tanto, es conveniente conocer las distintas fases que presenta una grieta, las cuales son: Iniciación, Desarrollo y Propagación.
La iniciación implica condiciones que conduzcan o causen el agrietamiento inicial, los cuales pueden ser desde submicroscópicos hasta perceptibles a simple vista. En la iniciación se deben considerar tres condiciones: a) Presencia de defectos estructurales y falta de homogeneidad en los componentes originales; b) Defectos metalúrgicos; c) Defectos introducidos en el periodo de servicio en la parte estructural y metalúrgica de los materiales. La primera condición se investiga mediante pruebas no destructivas, admitiendo que no es posible la obtención industrial de materiales y soldaduras perfectos. Los defectos estructurales y metalúrgicos, pueden variar desde dislocaciones atómicas hasta grandes discontinuidades apreciables a simple vista. En tanto que los defectos introducidos en el periodo de servicio pueden ser grietas, picaduras de corrosión, ralladuras, etc., producidas en el lugar de trabajo.
Desde el inicio hasta cuando la grieta tiene una dimensión crítica se conoce como etapa de desarrollo inicial. La amplitud dependerá de características como: propiedades mecánicas y metalúrgicas, naturaleza del defecto inicial, tamaño o espesor de la probeta, el grado de fatiga causado por los esfuerzos residuales y cargas externas. En materiales con comportamiento frágil esta etapa puede ser infinitamente pequeña, contrariamente en materiales con comportamiento dúctil.
2.2. Análisis Dimensional.
Muchas cantidades físicas pueden ser expresadas en términos de masa, longitud, y tiempo, y a su vez ser representadas por los símbolos M, L, y T respectivamente. Así, la velocidad es LT-1, aceleración LT-2,
fuerza MLT-2, unidades de esfuerzo ML-1T-2, etc. Una fórmula expresada así es una fórmula dimensional, y
las distintas aplicaciones de este sistema de representación constituye un análisis dimensional. Dichos análisis, pueden ser utilizados para verificar la homogeneidad de fórmulas, unidades, derivar fórmulas, y establecer relación entre sistemas físicos similares que difieren en escala (modelo/prototipo).
El análisis dimensional es una herramienta básica para desarrollar modelos matemáticos de fenómenos físicos y puede ayudar a entender modelos existentes. De esta manera los conceptos complicados de entender en Mecánica de Fractura pueden verse con una relativa transparencia cuando uno considera la relevancia dimensional del problema.
2.2.1. El teorema-ΠΠ de Buckingham.
El primer paso, en la construcción de un modelo matemático de un fenómeno físico, es identificar los parámetros que pueden influenciar el fenómeno. Asumir que un problema, o una versión idealizada de
éste, puede ser descrito por las siguientes cantidades escalares:
{
u W W
,
1,
2,...
W
n}
, las dimensiones detodas las cantidades están denotadas por
{
[ ] [ ] [ ] [ ]
}
n
W
W
W
u
,
1,
2,...,
. Ahora, suponiendo que nosotrosdeseamos expresar la primer variable,
u
, en función de los parámetros:(
)
u
=
f W W
1,
2,...
W
n (2.1)Así el proceso de modelación del problema es reducido a buscar una relación matemática que represente
de la mejor manera posible f . Nosotros podemos observar esto, cuando realizamos determinados
experimentos en los cuales medimos u , mientras variamos cada Wi de manera independiente. El número
de experimentos se puede reducir y el proceso de modelación ser simplificado mediante un análisis dimensional. El primer paso es identificar todas las unidades dimensionales fundamentales (udf) en el
problema:
{
L L
1, ,...,
2L
m}
. Por ejemplo, un problema mecánico típico puede tenercada cantidad en nuestro problema como un producto de potencias de las udf , para alguna cantidad X,
nosotros tenemos:
[ ]
1 2...
3 2 1 a m a aL
L
L
X
=
(2.2)La cantidad X es adimensional si
[ ]
X
= 1En el estudio de las W, se deben identificar m cantidades primarias que contengan todas las udf en el
problema. Las variables que quedan son cantidades secundarias, y sus dimensiones pueden expresarse en termino de las cantidades primarias:
[ ]
[ ]
m j( )[ ]
am j(m) m aj
m
W
...
W
W
=
+ ++ 1 1 (j=1, 2, . . ., n-m) (2.3)
Se puede definir un número determinado de nuevas cantidades,
π
i, que son adimensionales:) m ( j m ) ( j m a m a j m i
W
...
W
W
+ + +=
1 1π
(2.4)Similarmente, las dimensiones de u pueden ser expresadas en términos de las dimensiones de cantidades
primarias:
[ ] [ ] [ ]
am m aW
...
W
u
=
1 (2.5)y se puede formar las siguientes cantidades adimensionales
π =
u
W
aW
mam11
...
(2.6)
De acuerdo con el teorema-Π de Buckingham,
π
depende solo sobre los grupos adimensionales.(
)
π
=
F
π π
1,
2,...,
π
n m− (2.7)Esta nueva función F, es independiente del sistema de unidades de medición. Note que el número de
cantidades en F ha sido reducido de la anterior por m, el número de udf . Así el análisis dimensional
redujo el grado de libertad en nuestro modelo, y nosotros solo necesitamos variar n-m cantidades en
nuestros experimentos o simulaciones por computadora [2.1].
El teorema-Π de Buckinghan da una guía sobre como escalar un problema para diferentes tamaños o para
otro sistema de unidades. Cada grupo adimensional, (
π
i) se escala de manera que se puedan obtenerpruebas en un túnel de viento, en un modelo de un nuevo diseño de aeroplanos, el análisis dimensional establece que se pueden reducir todas las dimensiones de longitud en igual proporción; así es posible construir un modelo a escala del aeroplano. Las dimensiones de longitud del aeroplano son las cantidades importantes en el problema; no obstante, para el comportamiento aerodinámico exacto del modelo, se necesitan escalar la velocidad del viento y la viscosidad del aire de acuerdo con el tamaño reducido del aeroplano. (en realidad un túnel de viento de prueba, el tamaño del modelo normalmente es llevado a la escala límite de tal manera que los errores introducidos por no escalar la viscosidad sean menores). Con esto se puede ver la utilidad de poder comparar casos de distintas magnitudes sobre una base congruente.
2.2.2. Análisis Dimensional en Mecánica de Fractura.
El análisis dimensional provee una herramienta importante en mecánica de fractura. A continuación, se presenta un ejemplo. Considerando una serie de placas agrietadas bajo un esfuerzo de tensión lejana, σσ∞∞,
como se ilustra en la figura 2.2 . Y suponiendo que es un problema bidimensional, donde el espesor se desprecia.
Figura. 2.2. Placas sujetas a esfuerzos de tensión lejano a) grieta en el borde, placa infinita; b) grieta en el borde, placa finita; c) grieta en el borde con zona plástica en la punta.
En primera instancia se estudia una grieta de longitud “a” en al orilla de una placa semi-infinita, elástica,
(
)
σ
ij=
f
1σ
, , ,
E
ν σ ε
kl,
kl, , ,
a r
θ
(2.8)donde: σ - Esfuerzo aplicado.
E - Módulo de Young.
ν - Relación de Poisson.
σ
kl- Componentes restantes de esfuerzo.kl
ε
- Todas las componentes no iguales a cero del tensor de deformación unitaria.a -longitud de la grieta.
r - Distancia al que se encuentra el estado de esfuerzos a determinar.
θ
- Ángulo al que se encuentra el estado de esfuerzos a determinar.Figura. 2.3. Estado de esfuerzos cerca de la punta de la grieta, en un material elástico.
Se elimina
σ
kl yε
kl de f1 debido a que se trata de un problema lineal elástico, y la deformación unitariaestá únicamente definida por el esfuerzo a través de la Ley de Hooke. Las componentes de los esfuerzos para un punto cercano a la punta de la grieta se incrementan en proporción de una y de otra. Por lo tanto,
σσ∞∞ y a son las cantidades primarias. Involucrando el teorema-Π de Buckingham tenemos:
σ
σ
σ
ν θ
ij
F
E r
a
=
1, , ,
(2.9)Cuando la placa es finita (Figura 2.2.b), una dimensión adicional es requerida para describir el problema:
σ
σ
σ
ν θ
ij
F
E r
a
W
a
=
2, ,
, ,
(2.10)Así la ecuación (2.9), puede dar un error en el desarrollo cuando la grieta se extiende a través de una fracción significante del ancho de la placa. Considerando una placa grande y una pequeña del mismo
local para un ángulo
θ
del plano de la grieta en cada placa puede depender solo de la relación r / a , yaque las placas permanecen elásticas.
Cuando una zona plástica se forma en la punta de la grieta (Fig. 2.2.c), el problema se complica más. Si nosotros asumimos que el material no se endurece por deformación, el esfuerzo de cedencia es suficiente para definir las propiedades de flujo. El esfuerzo de cedencia está dado por:
=
ν
θ
σ
σ
σ
σ
σ
,
a
r
,
a
W
,
a
r
,
,
E
F
ys yij
3 (2.11)
Las ecuaciones (2.9) y (2.10) corresponden a MFLE y la ecuación (2.11) es una relación elastoplástica. Así con un análisis dimensional determinamos que la MFLE es válida solamente cuando ry<<a y σσ∞∞ << σσys.
2.3. Mecánica de la Fractura Lineal Elástica.
2.·3.1. Punto de Vista Atómico de la Fractura.
La formación de superficies nuevas durante la fractura requiere la energía necesaria para la rotura de los enlaces atómicos. De este modo, la energía o trabajo necesario para la formación de estas superficies
estará dado por
W
S=
2
γ
S, en dondeγ
S, es la energía de superficie específica por unidad de área. Eltrabajo necesario para formar dichas superficies se puede calcular también a partir de una consideración
como la sugerida por Orowan [2.2] (Figura 2.4). A una distancia de equilibrio entre los planos de átomos
(
a
0), el esfuerzoσσ
es igual a cero. Para separar estos planos atómicos en una distanciax
=
a
−
a
0 se necesita aplicar un esfuerzo que corresponda a la resistencia cohesiva del sólido. En el punto de la fractura(
σ =
σ
C) los enlaces atómicos se rompen y las fuerzas que los unen disminuyen, en forma
gradual, hasta llegar a cero. La variación del esfuerzo de tensión
σσ
con respecto a la distancia
interatómica se puede calcular por una curva senoidal que posee una longitud de onda
λλ
:
=
λ
π
σ
σ
Cx
2
sen
(2.12)donde:
σσ
C– es la resistencia teórica.
El trabajo o la energía de deformación Wεε que causa la fractura, se puede calcular como el área por debajo
de la curva (figura 2.4) en la distancia que separa completamente los planos de átomos
λλ
/2
, y se tiene,
por consiguiente:
C Cdx
x
dx
W
σ
π
λ
λ
π
σ
σ
λ λ ε
=
=
=
∫
∫
2 0 2 02
sen
(2.13)Al igualar este trabajo con la energía de superficie
W
S de las superficies recién formadas, se obtiene:S
C
γ
σ
π
λ
=
2
(2.14)Para una pequeña deformación inicial, se aplica la ley de Hooke, y
0
a
x
E
E
C
=
⋅
ε
=
⋅
σ
(2.15)donde: E – Módulo de Young
ε
- deformación unitaria y es igual a (x/a
0)Un cálculo aproximado de “x” será:
λλ
/2
ππ
, obteniéndose:
0
2
a
E
C
![Tabla 3.1. Cargas de colapso para cascarones y placas de espesor delgado [[3.13]].](https://thumb-us.123doks.com/thumbv2/123dok_es/4974920.75911/125.612.163.490.297.690/tabla-cargas-colapso-cascarones-placas-espesor-delgado.webp)
