Diseño e implementación de un sistema scada para el Control de enfriamiento del tanque de agua fría de la Planta de procesos análogos (ppa)
134
0
0
Texto completo
(2) DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA SCADA PARA EL CONTROL DE ENFRIAMIENTO DEL TANQUE DE AGUA FRÍA DE LA PLANTA DE PROCESOS ANÁLOGOS (PPA). VEGA CORREA JOSE LEONARDO MEZA AGUILAR FABIAN ANTONIO. Tesis presentada al Programa de Ingeniería en Control de la Universidad Distrital “Francisco José de Caldas” Facultad Tecnológica, para obtener el título de Ingeniero en Control. Programa: Ingeniería en Control. Director: Ing. Jorge Eduardo Porras Bohada Co-Director: Ing. M.Sc. Andrés Escobar Díaz. Bogotá D.C., Colombia 2016 2.
(3) HOJA DE ACEPTACIÓN. DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA SCADA PARA EL CONTROL DE ENFRIAMIENTO DEL TANQUE DE AGUA FRÍA DE LA PLANTA DE PROCESOS ANÁLOGOS (PPA). Observaciones: ______________________________________________________________________ ______________________________________________________________________ ______________________________________________________________________ ______________________________________________________________________ ______________________________________________________________________ ______________________________________________________________________. _____________________________ Director del Proyecto Ing. Jorge Eduardo Porras Bohada. _____________________________ Co-Director del Proyecto Ing. M.Sc. Andrés Escobar Díaz. _____________________________ Jurado Ing. M.Sc. Alberto Delgadillo Gómez. Fecha de presentación: Mayo de 2016 3.
(4) Resumen En el laboratorio de industrial de la Universidad Distrital Francisco José de Caldas Facultad Tecnológica, se tienen equipos propios de automatización que no estaban siendo utilizados por los estudiantes del proyecto curricular de tecnología en industrial e ingeniería en producción. Durante el desarrollo de la asignatura “Instrumentación de Procesos II” los estudiantes de Ingeniería en Control deciden realizar el prototipo de una planta didáctica que recibe el nombre de Planta de Procesos Análogos (PPA) con los equipos que dispone el laboratorio para usarla como una herramienta teórico-práctica para simular procesos industriales de automatización y control de variables físicas como (Nivel, Temperatura, Flujo). La planta cuenta con un panel de control, actuadores, tanques y conexiones hidráulicas dentro de una estructura metálica. La planta no posee elementos para la medición de temperatura y nivel, tampoco cuenta con sistemas de control para estas variables. En este proyecto se seleccionaron e instalaron sensores de tipo industrial que permitieron realizar un proceso de identificación experimental mediante el software MATLAB® se obtuvo un modelo aproximado que caracteriza el comportamiento del sistema térmico en el tanque de agua fría de la planta, se diseña un controlador PID por el método del lugar de las raíces que es implementado en el controlador Lógico Programable (PLC) marca Allen Bradley desde el software RSLogix5000, y con una interfaz gráfica desarrollada en FactoryTalk View para la pantalla HMI se implementa un sistema de supervisión y control y adquisición de datos (SCADA).. Palabras clave: Control Digital, Control de Temperatura, Sistema SCADA, Intercambiador de Calor, Red Ethernet.. 4.
(5) Abstract In the laboratory of industrial of the University Francisco José de Caldas Faculty Technological, have own equipment automation that were not being used by students of the curricular project of technology in industrial and engineering in production. During the development of the subject "Process Instrumentation II" Engineering Control students decide to make the prototype of a didactic plant that receives the name of Process Analogues Plant (PPA) with the equipment available in the laboratory for use as a theoretical-practical tool to simulate industrial processes of automation and control of physical variables as (level, temperature, flow). The plant has a control panel, actuators, tanks, and hydraulic connections within a metallic structure. The plant does not have elements for measurement of temperature and level, nor account with control systems for these variables. In this project were selected and installed sensors of industrial type that allowed to realize a process of experimental identification by means of the software MATLAB ® there was obtained an approximate model that characterizes the behavior of the thermal system in the cold water tank of the plant, a controller PID is designed by the method of the place of the roots that is implemented in the Programmable Logical controller (PLC) Allen Bradley mark from the software RSLogix5000, and with a graphical interface developed in FactoryTalk View for screen HMI is implemented a system of supervision and control and data acquisition (SCADA).. Keywords:. Digital. Control,. Temperature Control,. Exchanger, Ethernet Network.. 5. SCADA Systems,. Heat.
(6) Tabla de contenido Resumen ......................................................................................................................................... 4 Abstract ........................................................................................................................................... 5 Lista de Figuras .............................................................................................................................. 9 Lista de Tablas .............................................................................................................................. 13 1. Introducción .............................................................................................................................. 14 1.1 Planteamiento del Problema ............................................................................................... 15 1.2 Objetivos ............................................................................................................................. 16 1.2.1 Objetivo General........................................................................................................... 16 1.2.2 Objetivos Específicos ................................................................................................... 16 2. Marco de Referencia ................................................................................................................ 17 2.1 Antecedentes ...................................................................................................................... 17 2.1.1 Prototipo para control automático de nivel y caudal de líquidos ................................. 17 2.1.2 Diseño, implementación y validación de un controlador PID autosintonizado ........... 18 2.1.3 Desarrollo del sistema de control de nivel para un tanque surtidor de agua y almacenador de energía térmica en procesos de lavado y tintorería .................................. 18 2.2 Marco Teórico ..................................................................................................................... 19 2.2.1 Sensor de temperatura RTD ........................................................................................ 19 2.2.2 Sensor de temperatura termistor ................................................................................. 21 2.2.3 Modelo de sistemas ..................................................................................................... 22 2.2.3.1 Tipos de modelos ...................................................................................................... 22 2.2.3.2 Identificación de sistemas ......................................................................................... 23 2.2.3.3 Modelos paramétricos ............................................................................................... 24 2.2.3.4 Tipos de modelos paramétricos ................................................................................ 25 2.2.4 Intercambiador de calor................................................................................................ 27 2.2.4.1 Análisis del intercambiador de calor ......................................................................... 28 2.2.4.2 Método de la diferencia media logarítmica de temperatura (LMTD) ........................ 30 2.2.5 Norma ISA 88 en procesos de producción .................................................................. 31 2.2.5.1 Procedimiento del modelo ISA 88............................................................................. 32 3. Metodología .............................................................................................................................. 34 4. Ingeniería Conceptual............................................................................................................... 34 4.1 Requerimientos ................................................................................................................... 34 4.2 Alcance ................................................................................................................................ 35 6.
(7) 4.3 Descripción preliminar del proceso..................................................................................... 35 4.4 Normatividad ....................................................................................................................... 36 4.5 Diagrama de flujo de proceso (PFD) .................................................................................. 36 5. Ingeniería Básica ...................................................................................................................... 37 5.1 Descripción general de la planta ........................................................................................ 37 5.2 Descripción del proceso...................................................................................................... 39 5.3 Descripción de instrumentación y equipos ......................................................................... 41 5.4 Descripción del sistema de control ..................................................................................... 44 6. Ingeniería en Detalle ................................................................................................................. 46 6.1 Selección sensores de temperatura ................................................................................... 46 6.1.1 Sensor RTD .................................................................................................................. 46 6.1.2 Linealización sensor RTD PT100 4-20 mA.................................................................. 49 6.1.3 Características estáticas sensor PT100 ...................................................................... 50 6.1.4 Sensor termistor ........................................................................................................... 53 6.1.5 Diseño del transmisor de temperatura 0-10 VDC........................................................ 54 6.1.6 Características estáticas sensor termistor ................................................................... 57 6.2 Instalación sensores ........................................................................................................... 58 6.2.1 Sensor PT100 y sensores de nivel .............................................................................. 58 6.2.2 Sensores de temperatura termistor ............................................................................. 59 6.3 Modelo ................................................................................................................................. 60 6.3.1 Modelo sensor RTD ..................................................................................................... 60 6.3.2 Modelo sensor termistor ............................................................................................... 61 6.3.3 Modelo bomba .............................................................................................................. 62 6.3.4 Modelo intercambiador de calor ................................................................................... 67 6.3.4.1 Cálculo de la eficiencia del intercambiador - Método NTU ...................................... 73 6.4 Experimento de identificación ............................................................................................. 75 6.4.1 Diseño del controlador PID por el lugar geométrico de las raíces .............................. 78 6.4.2 Implementación del controlador en el PLC .................................................................. 80 6.4.3 Resultados controlador PID ......................................................................................... 81 6.5 Arquitectura del sistema SCADA ........................................................................................ 83 6.5.1 Creación de la red Ethernet ......................................................................................... 84 6.5.1.1 Configuración del computador .................................................................................. 84 6.5.1.2 Configuración de RSLinx Classic .............................................................................. 88 6.5.1.3 Configuración IP del computador.............................................................................. 89 6.5.1.4 Configuración IP de la HMI ....................................................................................... 89 7.
(8) 6.5.1.5 Configuración IP del PLC .......................................................................................... 90 6.5.1.6 Configuración IP del variador .................................................................................... 90 6.5.1.7. Configuración del variador en RSLogix5000 ........................................................... 91 6.5.1.8 Configuración del módulo análogo en RSLogix5000 ............................................... 94 6.6 Códigos realizados en RSLogix5000 ................................................................................. 96 6.6.1 Lectura de los datos de los sensores .......................................................................... 96 6.6.2 Subrutinas .................................................................................................................... 99 6.6.2.1 Inicializar Variables ................................................................................................... 99 6.6.2.2 Select ....................................................................................................................... 100 6.6.2.3 Modo Manual ........................................................................................................... 101 6.6.2.4 Alarmas.................................................................................................................... 101 6.6.2.5 Control On-Off ......................................................................................................... 102 6.6.2.6 Resultado Control On-Off ........................................................................................ 103 6.7 Diseño de interfaz gráfica de usuario ............................................................................... 103 6.8 FactoryTalk View ............................................................................................................... 105 6.8.1 Alarmas en FactoryTalk View .................................................................................... 105 6.8.2 Pantallas en FactoryTalk View ................................................................................... 108 6.8.3 Descripción de las ventanas ...................................................................................... 109 6.8.3.1 Ventana Principal .................................................................................................... 109 6.8.3.2 Ventana Tanque de Suministro .............................................................................. 110 6.8.3.3 Ventana Gráfica RTD .............................................................................................. 111 6.8.3.4 Ventana PID ............................................................................................................ 111 6.8.3.5 Ventana PPA MANUAL ........................................................................................... 112 6.8.3.6 Ventana Variador .................................................................................................... 112 7. Conclusiones .......................................................................................................................... 114 8. Recomendaciones .................................................................................................................. 115 9. Bibliografía .............................................................................................................................. 116 10. Anexos .................................................................................................................................. 120 10.1 Manual de Prácticas de Laboratorio ............................................................................... 120 10.2 Cámara Termográfica FLIR i7 ........................................................................................ 133. 8.
(9) Lista de Figuras Fig. 1 Arquitectura del sistema ..................................................................................................... 19 Fig. 2 Curvas de resistencia relativa de varios metales vs temperatura ..................................... 20 Fig. 3 Curva resistencia vs temperatura termistor NTC y PTC.................................................... 21 Fig. 4 Proceso de identificación .................................................................................................... 24 Fig. 5 Diagrama de bloques de las estructuras de la tabla 1....................................................... 27 Fig. 6 Radiador típico de un automóvil ......................................................................................... 28 Fig. 7 Intercambiador de calor (radiador) de flujo cruzado no mezclado .................................... 28 Fig. 8 Flujo cruzado de un solo paso con los dos fluidos de flujo no mezclado .......................... 31 Fig. 9 Estructura básica de la norma ISA 88 ................................................................................ 32 Fig. 10 Estructura fundamental en proyectos de ingeniería ........................................................ 34 Fig. 11 Diagrama de flujo de proceso de la planta ...................................................................... 37 Fig. 12 Planta de procesos análogos ........................................................................................... 38 Fig. 13 Diagrama PI&D de la planta ............................................................................................. 39 Fig. 14 Modelo físico de la planta de acuerdo a la norma ISA88 ................................................ 40 Fig. 15 Diagrama de bloques de sistema de control PID ............................................................ 45 Fig. 16 Diagrama de bloques de sistema de control On-Off........................................................ 45 Fig. 17 RTD PT100 ....................................................................................................................... 46 Fig. 18 Transmisor de temperatura para la RTD PT100 ............................................................. 48 Fig. 19 Gráfica corriente vs temperatura RTD ............................................................................. 50 Fig. 20 Valor crítico de t para los grados de libertad y área en una cola .................................... 52 Fig. 21 Termistor NTC de 50 KΩ .................................................................................................. 53 Fig. 22 Gráfica resistencia vs temperatura del termistor ............................................................. 54 Fig. 23 Gráfica resistencia vs temperatura termistor linealizado ................................................. 55 Fig. 24 Circuito de medición termistor .......................................................................................... 56 Fig. 25 Gráfica temperatura vs voltaje del termistor NTC ............................................................ 57 Fig. 26 Esquemático transmisor de temperatura termistor NTC ................................................. 57 Fig. 27 Circuito impreso transmisor de temperatura termistor NTC ............................................ 57 Fig. 28 Instalación sensor RTD PT100 y sensores de nivel ........................................................ 59 Fig. 29 Instalación termistor a la entrada del intercambiador de calor ........................................ 59 Fig. 30 Instalación termistor a la salida del intercambiador de calor ........................................... 60 Fig. 31 Diagrama de bloques sensor RTD ................................................................................... 60 Fig. 32 Diagrama de bloques en simulink sensor RTD................................................................ 61 9.
(10) Fig. 33 Diagrama de bloques sensor Termistor ........................................................................... 61 Fig. 34 Diagrama de bloques en simulink sensor termistor ......................................................... 62 Fig. 35 Diagrama de bloques bomba ........................................................................................... 62 Fig. 36 Modelo dinámico simple para una bomba ....................................................................... 63 Fig. 37 Probeta capacidad 1000ml ............................................................................................... 63 Fig. 38 Bloque en simulink para el modelo bomba ...................................................................... 64 Fig. 39 Rampa aceleración desaceleración generado por el variador de velocidad .................. 65 Fig. 40 Datos de tiempo rampa aceleración y desaceleración programada en RSLogix5000 ... 65 Fig. 41 Gráfica respuesta de un sistema de primer orden ........................................................... 66 Fig. 42 Diagrama de bloques en simulink modelo bomba con retardo ....................................... 67 Fig. 43 Intercambiador de Calor (Radiador) ................................................................................. 67 Fig. 44 TH-1 Relative Humidity / Temperature Probe Style Meter .............................................. 68 Fig. 45 Instrumento para medir velocidad del viento ................................................................... 68 Fig. 46 Registro de temperatura del aire a la entrada del radiador ............................................. 69 Fig. 47 Registro de temperatura del aire a la salida del radiador ................................................ 69 Fig. 48 Registro de velocidad del aire a la entrada del radiador ................................................. 70 Fig. 49 Registro de velocidad del aire a la salida del radiador .................................................... 70 Fig. 50 Factor de corrección para el radiador .............................................................................. 72 Fig. 51 Eficiencia del radiador de automóvil ................................................................................ 75 Fig. 52 Metodología de experimento de identificación................................................................. 76 Fig. 53 Curva de reacción de proceso planta en lazo abierto ..................................................... 77 Fig. 54 Identificación por System Identification Tool de MATLAB® ............................................ 77 Fig. 55 Porcentaje de aproximación modelos .............................................................................. 78 Fig. 56 Configuración de controladores en Sisotool de MATLAB® ............................................. 79 Fig. 57 Lugar de las raíces de la planta en lazo cerrado ............................................................. 79 Fig. 58 Controlador PID implementado en ecuación en diferencias ........................................... 81 Fig. 59 Variable de proceso inicial (40 ºC) vs Set Point (33 ºC) .................................................. 82 Fig. 60 Variable de proceso inicial (45 ºC) vs Set Point (38 ºC) .................................................. 82 Fig. 61 Diagrama de bloques general de un sistema SCADA ..................................................... 83 Fig. 62 Arquitectura sistema SCADA tanque agua fría de la PPA .............................................. 84 Fig. 63 Red de comunicación Ethernet de la planta .................................................................... 85 Fig. 64 Paso 1. Abrir el panel de control ...................................................................................... 86 Fig. 65 Paso 2. Seleccionar redes e internet ............................................................................... 86 Fig. 66 Paso 3. Abrir el centro de redes y recursos compartidos ................................................ 86 10.
(11) Fig. 67 Paso 4. Cambiar la configuración del adaptador de red ................................................. 87 Fig. 68 Paso 5. Configuración de red de área local ..................................................................... 87 Fig. 69 Paso 6. Selección Protocolo de Internet TCP/IP ............................................................. 87 Fig. 70 Paso 7. Asignación de dirección IP del computador ....................................................... 88 Fig. 71 Pantalla inicial de RSLinx para configurar las IP’s de la red ........................................... 88 Fig. 72 Red Ethernet creada en RSLinx....................................................................................... 89 Fig. 73 Asignación de dirección IP para el computador en RSLinx............................................. 89 Fig. 74 Asignación de dirección IP para la HMI ........................................................................... 89 Fig. 75 Asignación de dirección IP para el PLC ........................................................................... 90 Fig. 76 Asignación de dirección IP para el variador de velocidad ............................................... 90 Fig. 77 Red de comunicación ethernet en RSLinx de la planta ................................................... 90 Fig. 78 Selección de la MAC del módulo de comunicación del variador de velocidad ............... 91 Fig. 79 Configuración IP variador PowerFlex40 en el programa “BOOTP/DHCP” ..................... 91 Fig. 80 Selección variador PowerFlex40 en RSLogix5000 .......................................................... 92 Fig. 81 Configuración dirección IP del variador en RSLogix5000 ............................................... 92 Fig. 82 Desactivar “Unicast Connection Over EtherNet/IP” ......................................................... 93 Fig. 83 Conectar el variador por medio del software RSLogix5000 ............................................ 93 Fig. 84 Configuración final del variador de velocidad .................................................................. 94 Fig. 85 Agregar modulo análogo al proyecto en RSLogix5000 ................................................... 94 Fig. 86 Selección del módulo análogo 1769-IF4.......................................................................... 95 Fig. 87 Configuración módulo análogo......................................................................................... 95 Fig. 88 Tareas periódicas para la lectura de los sensores de temperatura ................................ 97 Fig. 89 Programación en Ladder de lectura del módulo análogo RTD ....................................... 97 Fig. 90 Programación en texto estructurado para linealización sensor PT100 ........................... 97 Fig. 91 Programación en Ladder de lectura de módulo análogo para los termistores ............... 98 Fig. 92 Programación en texto estructurado para la linealización de los termistores ................. 98 Fig. 93 Rutinas creadas en el programa principal ....................................................................... 99 Fig. 94 Llamado subrutinas en Ladder del “Main Routine” .......................................................... 99 Fig. 95 Subrutina inicializar variables en texto estructurado ..................................................... 100 Fig. 96 Subrutina de acceso a rutina manual o rutina PID en grafcet ....................................... 100 Fig. 97 Subrutina Modo Manual en Ladder ................................................................................ 101 Fig. 98 Subrutina de alamas en texto estructurado para el tanque de suministro .................... 102 Fig. 99 Subrutina Control On-Off ................................................................................................ 102 Fig. 100 Implementación Controlador On-Off ............................................................................ 103 11.
(12) Fig. 101 Ejemplo del enlace de variables del PLC y objetos de la pantalla HMI ...................... 105 Fig. 102 Configuración de alarmas ............................................................................................ 106 Fig. 103 Selección de variables de activación de alarmas desde el PLC ................................. 106 Fig. 104 Mensaje alarma de nivel bajo....................................................................................... 107 Fig. 105 Mensaje alarma de nivel alto ........................................................................................ 107 Fig. 106 Configuración valor del Trigger para las alarmas ........................................................ 108 Fig. 107 Alarma de nivel alto tanque de suministro ................................................................... 108 Fig. 108 Alarma de nivel bajo tanque de suministro .................................................................. 108 Fig. 109 Pantallas creadas en la HMI ........................................................................................ 109 Fig. 110 Pantalla principal interfaz HMI...................................................................................... 110 Fig. 111 Tanque de suministro de la planta ............................................................................... 111 Fig. 112 Pantalla de tendencia del sensor RTD......................................................................... 111 Fig. 113 Pantalla de respuesta del controlador PID .................................................................. 112 Fig. 114 Pantalla de manipulación manual de componentes de la PPA ................................... 112 Fig. 115 Pantalla para cambiar parámetros del variador de velocidad ..................................... 113 Fig. 116 Cámara termográfica FLIR i7 ....................................................................................... 133 Fig. 117 Certificado de calibración cámara termográfica FLIR i7 .............................................. 133. 12.
(13) Lista de Tablas Tabla 1 Diferentes estructuras de modelos paramétricos ........................................................... 26 Tabla 2 Equipos iniciales del proyecto ......................................................................................... 34 Tabla 3 Instrumentación y equipos de la PPA ............................................................................. 41 Tabla 4 Clasificación y tolerancias de las sondas de resistencia IEC 60751 ............................. 47 Tabla 5 Especificaciones sensor PT100 ...................................................................................... 47 Tabla 6 Especificaciones transmisor de temperatura .................................................................. 48 Tabla 7 Datos corriente vs temperatura RTD .............................................................................. 49 Tabla 8 Datos tomados para la caracterización del sensor RTD ................................................ 50 Tabla 9 Resultado de características estáticas del sensor PT100 .............................................. 52 Tabla 10 Comportamiento característico termistor NTC ............................................................. 53 Tabla 11 Sensor linealizado ......................................................................................................... 55 Tabla 12 Temperatura vs Voltaje ................................................................................................. 56 Tabla 13 Datos tomados para la caracterización del sensor termistor ....................................... 58 Tabla 14 Resultado de características estáticas del sensor Termistor NTC .............................. 58 Tabla 15 Datos Frecuencia vs Caudal de la bomba .................................................................... 64 Tabla 16 Especificaciones Instrumento AMPROBE TH-1 ........................................................... 68 Tabla 17 Especificaciones anemómetro ...................................................................................... 69 Tabla 18 Resultados de caracterización del intercambiador de calor ......................................... 70 Tabla 19 Orden de las IPs en la red Ethernet .............................................................................. 85 Tabla 20 Lógica de estados de alarma para el tanque de suministro ....................................... 101 Tabla 21 Colores de estado utilizados para la programación HMI ............................................ 104 Tabla 22 Especificaciones cámara termográfica FLIR i7 .......................................................... 134. 13.
(14) 1. Introducción La automatización desempeña un papel fundamental en la industria para mejorar la competitiva por medio de elementos y dispositivos tecnológicos que aseguren un control y desempeño óptimo para aumentar la productividad, reducir costos y tiempos de producción y genere seguridad en la realización de procesos industriales para los trabajadores y consumidores. Es por esto que el Ingeniero en Control está en la capacidad de analizar, reconocer, modificar, diseñar sistemas aplicando conceptos de instrumentación, control y automatización en entornos industriales. Este proyecto se desarrolló para permitir a los estudiantes del proyecto curricular de Ingeniería en Control y carreras afines tener un prototipo a pequeña escala de un proceso industrial con la intención de manipular variables físicas y/o químicas. Para tal fin se implementó un sistema de control PID en el PLC CompactLogix L23EQB1B y con una interfaz gráfica en la pantalla HMI, la cual permite supervisar la variable de proceso temperatura en el tanque de agua fría de la planta. Para el uso de correcto de la planta junto con el sistema de control de temperatura, se encuentra el manual de prácticas (Ver Anexo 10.1) propuesto como guía para el desarrollo de prácticas de laboratorio por parte del personal del laboratorio, estudiantes y docentes de la facultad tecnológica y en las diferentes asignaturas de los diferentes proyectos curriculares que intervengan con la automatización y control de procesos industriales.. 14.
(15) 1.1 Planteamiento del Problema La planta de procesos análogos (PPA) ubicada en el laboratorio de industrial de la Universidad Distrital Francisco José de Caldas Facultad Tecnológica, no cuenta con ningún tipo de sensor o de un algoritmo de control o de interfaz gráfica que permita desarrollar prácticas de laboratorio en las asignaturas de instrumentación, control y automatización. Con el desarrollo de esta investigación se realizó la adquisición e instalación de sensores de temperatura para el tanque de agua fría de la planta, para luego obtener un modelo dinámico aproximado del sistema térmico a partir de un experimento de identificación con señal paso y el diseño de algoritmos de control PID y On-Off en el PLC para la supervisión y control en la pantalla HMI del proceso térmico. Existen limitantes en el proyecto debido a la falta de diferentes sensores de flujo y de presión en la planta para así facilitar la obtención de más datos que sean de ayuda para obtener un modelo matemático más exacto del sistema.. 15.
(16) 1.2 Objetivos 1.2.1 Objetivo General Diseñar e implementar un sistema SCADA con controlador PID en el PLC Allen Bradley para el enfriamiento del tanque de agua fría de la PPA.. 1.2.2 Objetivos Específicos Diseñar un experimento de identificación de las características y comportamiento del sistema para establecer el modelo dinámico aproximado del tanque de agua fría de la PPA. Seleccionar e implementar sensores para la medición de temperatura y de nivel. Diseñar e instalar los sistemas de acondicionamiento para los sensores. Implementar un controlador PID de temperatura para el tanque de agua fría en el PLC. Implementar un controlador On-Off de nivel máximo del tanque de agua fría en el PLC. Diseñar e implementar un sistema SCADA a través de la interfaz HMI Allen Bradley. Elaborar una práctica de laboratorio para comprobar el funcionamiento de la planta.. 16.
(17) 2. Marco de Referencia 2.1 Antecedentes La planta ha sido desarrollada por estudiantes de Ingeniería en Control con fines pedagógicos en la enseñanza de acciones de control, instrumentación, redes industriales con el fin de ayudar a mejorar los equipos de laboratorio existentes en los distintos proyectos curriculares de la facultad tecnológica. Es una planta que necesita mejoramiento continuo en adquisición de instrumentación (sensores y actuadores) para que la planta sea más robusta y puede aprovecharse todo su potencial. A continuación se presentan algunos antecedentes relacionados con el proyecto:. 2.1.1 Prototipo para control automático de nivel y caudal de líquidos Los estudiantes de Ingeniería mecánica de la UPS (Universidad Politécnica Salesiana, Ecuador), Robinson Molina, Cesar Machado y el docente Joseph Vergara, elaboraron el prototipo para observar y controlar las variables de nivel y de flujo mediante una interfaz hombre-máquina (HMI). Se empleó un PLC Siemens S7200 para controlar el nivel de líquido en un tanque para ensayo o medición con diámetro interno 161 mm, altura de 1100mm y una capacidad de 20 litros. Se usó un transmisor de presión Endress Hausser modelo PMC131-A32F1D10, un transmisor de flujo marca Kobold modelo DRS-0350 y una bomba centrifuga de ½ HP Thebe TH16AL. El transmisor de presión envía una señal para la medición de caudal se realiza en forma de pulsos para esto se utiliza el transmisor de caudal y la entrada de contador de pulsos rápidos del PLC, la calibración del transmisor se realizó en base a tiempo de llenado de volumen y comparando el resultado con el promedio de flujo resultante, para así controlar el apagado y/o encendido del motor de la bomba centrifuga con un PID Digital. El PLC permite comunicarse con el programa Intouch (GUI) y permite enviar datos a Excel por medio de tablas *.csv para analizar resultados con las gráfica generadas por la Interfaz Gráfica de Usuario.[1]. 17.
(18) 2.1.2 Diseño, implementación y validación de un controlador PID autosintonizado Los estudiantes de ingeniería eléctrica de la UTP (Universidad Tecnológica De Pereira, Colombia), Leonardo Lozano Valencia, Luis Rodríguez García y Didier Giraldo Buitrago diseñaron un controlador PID basado en el método de mínimos cuadrados para estimar los parámetros de la planta y la reubicación de los polos. El diseño propuesto es simulado en un computador análogo COMDYNA GP-6 para describir la dinámica del sistema de acuerdo a las ecuaciones de diferencias de hasta orden 4. Por medio del método de mínimos cuadrados recursivo se obtiene o estiman los parámetros del sistema en función de una matriz de ganancia, un vector de regresión y un error de estimación. Los coeficientes del controlador PID se investigan por el método de discretización de acuerdo a la función de transferencia para el sistema en lazo cerrado. Para sintonizar el controlador se usó el método de la respuesta al escalón desarrollado por Ziegler-Nichols para alcanzar una respuesta satisfactoria con un tiempo de muestreo de 200 milisegundos a una señal de referencia propuesta se realizaron todas las simulaciones en el computador.[2]. 2.1.3 Desarrollo del sistema de control de nivel para un tanque surtidor de agua y almacenador de energía térmica en procesos de lavado y tintorería La estudiante de Ingeniería Electrónica Sandra Milena Arango Restrepo de la Universidad Pontificia Bolivariana (Medellín, Colombia) desarrollo el proyecto con el objetivo de diseñar un sistema de control e instalar elementos como válvulas, relés y sensores, esto con el objetivo de conservar la energía térmica y almacenar el agua de recuperado y la que ha sido calentada por medio del serpentín en el tanque alimentador de las máquinas de lavado y teñido textil, para su ejecución fue necesario realizar una correspondiente identificación de la instrumentación, de los equipos que serán útiles y del montaje para el desarrollo del proyecto.. 18.
(19) Fig. 1 Arquitectura del sistema. En la Fig. 1 se muestra que el sistema no aprovecha los recursos de manera pertinente, por lo tanto es necesario implementar las acciones de control pertinentes para mejorar el proceso en cuanto a funcionalidad y reducción de gastos, también se instaló un tablero de control donde se visualizó estado actual de sensores y bombas. El PLC toma los datos de nivel, presión y temperatura, los procesa y controla las válvulas y bombas del sistema para la conservación de temperatura y la recuperación del agua para el proceso de lavado y teñido textil.[3]. 2.2 Marco Teórico 2.2.1 Sensor de temperatura RTD La medida de temperatura utilizando sondas de resistencia depende de la variación de resistencia en función de la temperatura, que es propia del elemento de detección. El elemento consiste, usualmente, en un arrollamiento de hilo muy fino del conductor adecuado bobinado entre capas de material aislante y protegido con un revestimiento de vidrio o de cerámica. El material que forma el conductor se caracteriza por el llamado "coeficiente de temperatura de resistencia" que expresa, a una temperatura especificada, la variación de la resistencia en ohmios del conductor por cada grado que cambia su temperatura. La relación entre estos factores puede verse en la siguiente expresión lineal: Rt Ro 1 t . 19. (1).
(20) En donde:. Ro Resistencia en ohmios a 0 ºC R t Resistencia en ohmios a t ºC. Coeficiente de temperatura de la resistencia cuyo valor entre 0 ºC y 100 ºC es de 0,003850 ºC en la escala práctica de temperaturas internacional (IPTS-68) [4] En la Fig. 2 pueden verse las curvas de resistencia relativa de varios metales en función de la temperatura:. Fig. 2 Curvas de resistencia relativa de varios metales vs temperatura. Los materiales que forman el conductor de la resistencia deben poseer las siguientes características: Alto coeficiente de temperatura de la resistencia, ya que de este modo el instrumento de medida será muy sensible. Alta resistividad, ya que cuanto mayor sea la resistencia a una temperatura dada tanto mayor será la variación por grado (mayor sensibilidad). Relación lineal resistencia-temperatura. Rigidez y ductilidad, lo que permite realizar los procesos de fabricación de estirado y arrollamiento del conductor en las bobinas de la sonda, a fin de obtener tamaños pequeños (rapidez de respuesta). Estabilidad de las características durante la vida útil del material.[5] 20.
(21) 2.2.2 Sensor de temperatura termistor Los termistores son semiconductores electrónicos con un coeficiente de temperatura de resistencia negativo de valor elevado, por lo que presentan unas variaciones rápidas, y extremadamente grandes, para los cambios, relativamente pequeños, en la temperatura. Los termistores se fabrican con óxidos de níquel, manganeso, hierro, cobalto, cobre, magnesio, titanio y otros metales, y están encapsulados en sondas y en discos. Los termistores también se denominan NTC (Negative Temperature Coeficient coeficiente de temperatura negativo) existiendo casos especiales de coeficiente positivo cuando su resistencia aumenta con la temperatura (PTC - Positive Temperature Coeficient). La relación entre la resistencia del termistor y la temperatura viene dada por la expresión. 1. Rt Ro e. 1 . Tt To . (2). En donde: R t Resistencia en ohmios a la temperatura absoluta T t R o Resistencia en ohmios a la temperatura absoluta de referencia T o. Constante dentro de un intervalo moderado de temperaturas. En la Fig. 3 puede verse la curva característica resistencia-temperatura de termistores.. Fig. 3 Curva resistencia vs temperatura termistor NTC y PTC. En intervalos amplios de temperatura, los termistores tienen características no lineales. Al tener un alto coeficiente de temperatura, poseen una mayor sensibilidad y permiten 21.
(22) incluso intervalos de medida de 1 °C (span). Son de pequeño tamaño y su tiempo de respuesta depende de la capacidad térmica y de la masa del termistor, variando de 0,5 a 10 segundos.[5]. 2.2.3 Modelo de sistemas Cuando se hace necesario conocer el comportamiento de un sistema en unas determinadas condiciones y ante unas determinadas entradas, se puede recurrir a la experimentación sobre dicho sistema y a la observación de sus salidas. Sin embargo, en muchos casos la experimentación puede resultar compleja o incluso imposible de llevar a cabo, lo que hace necesario trabajar con algún tipo de representación que se aproxime a la realidad, y a la que se conoce como modelo.. 2.2.3.1 Tipos de modelos Los modelos de sistemas físicos pueden ser de muy diversos tipos. Una clasificación, en función del grado de formalismo matemático que poseen, es la siguiente:. Modelos mentales, intuitivos o verbales: Estos modelos carecen de formalismo matemático. Para conducir un coche, por ejemplo, se requiere un modelo mental o intuitivo sobre el efecto que produce el movimiento del volante, pero no es necesario caracterizar dicho efecto mediante ecuaciones matemáticas exactas. Modelos no paramétricos: Muchos sistemas quedan perfectamente caracterizados mediante un gráfico o tabla que describa sus propiedades dinámicas mediante un número no finito de parámetros. Por ejemplo, un sistema lineal queda definido mediante su respuesta al impulso o al escalón, o bien mediante su respuesta en frecuencia. Modelos paramétricos o matemáticos: Para aplicaciones más avanzadas, puede ser necesario utilizar modelos que describan las relaciones entre las variables del sistema mediante expresiones matemáticas como pueden ser ecuaciones diferenciales (para sistemas continuos) o en diferencias (para sistemas discretos).[6]. 22.
(23) 2.2.3.2 Identificación de sistemas Se entiende por identificación de sistemas a la obtención de forma experimental de un modelo que reproduzca con suficiente exactitud, para los fines deseados, las características dinámicas del proceso objeto de estudio. El proceso de identificación comprende los siguientes pasos:. 1. Obtención de datos de entrada - salida: Para ello se debe excitar el sistema mediante la aplicación de una señal de entrada y registrar la evolución de sus entradas y salidas durante un intervalo de tiempo. 2. Tratamiento previo de los datos registrados: Los datos registrados están generalmente acompañados de ruidos indeseados u otro tipo de imperfecciones que puede ser necesario corregir antes de iniciar la identificación del modelo. 3. Elección de la estructura del modelo: Si el modelo que se desea obtener es un modelo paramétrico, el primer paso es determinar la estructura deseada para dicho modelo. 4. Obtención de los parámetros del modelo: Se procede a la estimación de los parámetros de la estructura que mejor ajustan la respuesta del modelo a los datos de entrada - salida obtenidos experimentalmente. 5. Validación del modelo: El último paso consiste en determinar si el modelo obtenido satisface el grado de exactitud requerido para la aplicación en cuestión.. 23.
(24) Fig. 4 Proceso de identificación. Dependiendo de la causa estimada, deberá repetirse el proceso de identificación desde el punto correspondiente [6]-[7]. Por tanto, el proceso de identificación es un proceso iterativo, cuyos pasos pueden observarse en el organigrama de la Fig. 4 2.2.3.3 Modelos paramétricos Los modelos paramétricos están descritos mediante una estructura y un número finito de parámetros que relacionan las señales de interés del sistema (entradas, salida y perturbaciones). En muchas ocasiones es necesario realizar la identificación de un sistema del cual no se tiene ningún tipo de conocimiento previo. Generalmente estos modelos permiten describir el comportamiento de cualquier sistema lineal. La dificultad radica en la elección del tipo de modelo (orden del mismo, número de parámetros, etc.) que se ajuste satisfactoriamente a los datos de entrada - salida obtenidos experimentalmente.. 24.
(25) 2.2.3.4 Tipos de modelos paramétricos Generalmente los modelos paramétricos se describen en el dominio discreto, puesto que los datos que sirven de base para la identificación se obtienen por muestreo. En el caso de que se requiera un modelo continuo, siempre es posible realizar una transformación del dominio discreto al continuo. La expresión más general de un modelo discreto es del tipo (3): s t t w t . (3). Donde w t es el término que modela la salida debida a las perturbaciones, t la salida debida a la entrada, y s t la salida medible del sistema. Cada uno de estos términos puede desarrollarse de la siguiente forma:. t G q 1, u t . (4). w t H q 1, e t . (5). s t A q 1, y t . (6). Donde q 1 es el operador retardo, representa un vector de parámetros, u t y e t son la entrada al sistema y el ruido de entrada al mismo respectivamente, y t es la salida de interés del sistema (que puede no coincidir con la salida medible). 1 1 Tanto G q , como H q , son cocientes de polinomios del tipo:. G q 1, . nk b 2 q n k 1 ... b n b q n k n b 1 B q 1 b1 q 1 f 1 q 1 ... f n f q n f F q 1 . (7). 1 nc C q 1 1 c 1 q ... c nc q 1 nd D q 1 1 d 1 q ... d nd q. (8). H q 1, . 1 Y A q , un polinomio del tipo:. A q 1, 1 a1 q 1 ... a na q na 25. (9).
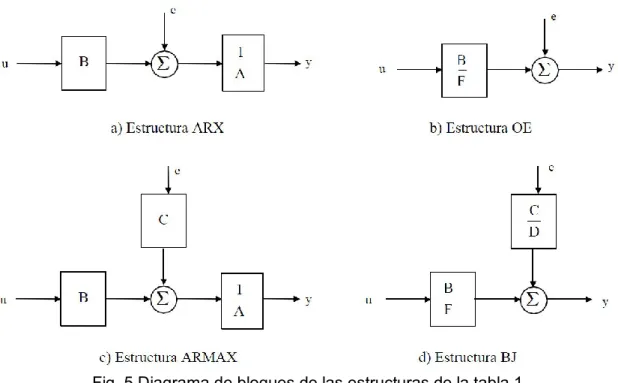
(26) El vector de parámetros contiene los coeficientes a i , b i ,c i ,d i y f i de las funciones de transferencia anteriores. La estructura genérica de estos modelos es por tanto:. A q 1 y t G q 1, u t H q 1, e t A q 1 y t . B q 1 C q 1 u t e t F q 1 D q 1 . (10) (11). Para elegir la estructura de este tipo de modelos hay que determinar el orden de cada uno de los polinomios anteriores, es decir na, nb, nc, nd, nf y el retardo entre la entrada y la salida nk. Una vez elegidos estos valores, sólo queda determinar el vector de coeficientes a i , b i ,c i ,d i ,f i que hacen que el modelo se ajuste a los datos de entrada salida del sistema real. En muchos casos, alguno de los polinomios anteriores no se incluye en la descripción del modelo, dando lugar a los siguientes casos particulares entre otros:. Tabla 1 Diferentes estructuras de modelos paramétricos. En la Fig. 5 se muestra el diagrama de bloques equivalente para cada uno de los modelos anteriores.. 26.
(27) Fig. 5 Diagrama de bloques de las estructuras de la tabla 1. La anulación de alguno de los polinomios, resultando estructuras simplificadas, facilita el proceso de ajuste de parámetros. Cada una de las estructuras (ARX, ARMAX, OE o BJ) tiene sus propias características y debe ser elegida fundamentalmente en función del punto en el que se prevé que se añade el ruido en el sistema. En cualquier caso, puede ser necesario ensayar con varias estructuras y con varios órdenes dentro de una misma estructura hasta encontrar un modelo satisfactorio. [6], [8]. 2.2.4 Intercambiador de calor Los intercambiadores de calor son aparatos que facilitan el intercambio de calor entre dos fluidos que se encuentran a temperaturas diferentes y evitan al mismo tiempo que se mezclen entre sí. El radiador de automóvil es un intercambiador de calor de tipo compacto (Ver Fig. 6), diseñado específicamente para lograr una gran área superficial de transferencia de calor por unidad de volumen. Los pasajes a través de los cuales pasa el flujo en estos intercambiadores de calor compactos suelen ser pequeños, por lo que se puede considerar el flujo como laminar.. 27.
(28) Fig. 6 Radiador típico de un automóvil. La gran área superficial en los intercambiadores compactos se obtiene sujetando placas delgadas o aletas corrugadas con poco espacio entre sí a las paredes que separan los dos fluidos. Los intercambiadores compactos como el radiador de un auto son de uso común en la transferencia de calor de gas (aire) hacia líquido (agua). En este tipo de intercambiador los dos fluidos suelen moverse de manera perpendicular entre sí y a esa configuración de flujo se le conoce como flujo cruzado, en la Fig. 7 se muestra que el flujo cruzado es no mezclado en virtud de que las aletas de placa fuerzan al fluido a moverse por un espaciamiento particular entre ellas e impiden su movimiento en la dirección transversal (es decir, paralelo a los tubos).. Fig. 7 Intercambiador de calor (radiador) de flujo cruzado no mezclado. 2.2.4.1 Análisis del intercambiador de calor Los intercambiadores de calor suelen operar durante largos periodos sin cambios en sus condiciones de operación. Por lo tanto, se pueden considerar como aparatos de flujo estacionario. Como tales, el gasto de masa de cada fluido permanece constante y las. 28.
(29) propiedades de los fluidos, como la temperatura y la velocidad, en cualquier entrada o salida, siguen siendo las mismas. Asimismo, las corrientes de fluido experimentan poco o ningún cambio en sus velocidades y elevaciones y, como consecuencia, los cambios en la energía cinética y en la potencial son despreciables. En general, el calor específico de un fluido cambia con la temperatura; pero, en un intervalo específico de temperaturas, se puede considerar como una constante en algún valor promedio, con poca pérdida en la exactitud. La conducción axial de calor a lo largo del tubo suele ser insignificante y se puede considerar despreciable. Por último, se supone que la superficie exterior del intercambiador de calor está perfectamente aislada, de modo que no se tiene pérdida de calor hacia el medio circundante y cualquier transferencia de calor sólo ocurre entre los dos fluidos. Las idealizaciones que acaban de describirse se logran muy cerca en la práctica y simplifican mucho el análisis de un intercambiador de calor con poca desviación en la exactitud. Por lo tanto son de uso común. Con estas suposiciones, la primera ley de la termodinámica requiere que la velocidad de la transferencia de calor desde el fluido caliente sea igual a la transferencia de calor hacia el frío; es decir, . . . . Q m c Cpc T c, s a l T c, e nt Q m h C p h T h, e nt Th, s a l . (12) (13). En donde los subíndices c y h se refieren a los fluidos frio y caliente, respectivamente, y . . m c , m h = gastos de masa C p c , C p h = calores específicos T c, s a l , T h, s a l = temperaturas de salida T c , e nt , T h, e nt = temperaturas de entrada . La razón de transferencia de calor Q se toma como una cantidad positiva y se sobreentiende que su dirección va del fluido caliente hacia el frío, de acuerdo con la segunda ley de la termodinámica.. 29.
(30) En el análisis de los intercambiadores de calor a menudo resulta conveniente combinar el producto del gasto de masa y el calor específico de un fluido en una sola cantidad. Ésta se llama razón de capacidad calorífica y se define para las corrientes de los fluidos caliente y frío en (14) y (15) así: . C h m h C ph . C c m c C pc. (14) (15). La razón de capacidad calorífica de una corriente de fluido representa la velocidad de la transferencia de calor necesaria para cambiar la temperatura de esa corriente en 1°C conforme fluye por el intercambiador de calor. Con la definición ya descrita de razón de capacidad calorífica, las ecuaciones (12) y (13) también pueden expresarse como: . Q C c T c, s al T c, ent . Q C h Th, e nt T h, s a l . (16) (17). 2.2.4.2 Método de la diferencia media logarítmica de temperatura (LMTD) La diferencia media logarítmica de temperatura se obtiene siguiendo el perfil real de temperaturas de los fluidos a lo largo del intercambiador y es una representación exacta de la diferencia de temperatura promedio entre los fluidos caliente y frio. T m l F T m l , C F. (18). En donde F es el factor de corrección, el cual depende de la configuración geométrica del intercambiador y de las temperaturas de entrada y de salida de las corrientes de fluido caliente y frio. En el intercambiador de calor a contra flujo la diferencia media logarítmica es. T m l , C F . T1 T 2 T1 ln T 2 . 30. (19).
(31) En la Fig. 8 se da el factor de corrección F para el intercambiador de flujo cruzado de un solo paso con los dos fluidos no mezclados (radiador de automóvil), en función de las razones P y R entre dos temperaturas definidas como: P R. t 2 t1 T1 t 1 T1 T 2 t 2 t1. (20) (21). En donde los subíndices 1 y 2 se refieren a la entrada y salida, respectivamente. Para un intercambiador de tubos y coraza, T y t representan las temperaturas del lado de la coraza y del lado del tubo.[9]-[10]. Fig. 8 Flujo cruzado de un solo paso con los dos fluidos de flujo no mezclado. 2.2.5 Norma ISA 88 en procesos de producción En el estándar ANSI/ISA–S88.01–1995 [11] se define que un proceso batch es un sistema que induce la producción de cantidades finitas de material, sometiendo a las cantidades de material de entrada a un conjunto ordenado de actividades de procesamiento sobre un periodo finito de tiempo, usando uno o más recursos. En este estándar se ha definido la terminología y los modelos para ayudar a especificar los recursos disponibles, las recetas y las fases necesarias para la fabricación de un producto en un sistema de producción. Estos modelos corresponden al modelo físico, al modelo de control de procedimientos y al modelo de proceso, a continuación en la Fig. 9 se presenta la estructura básica de la norma ISA 88. 31.
(32) Fig. 9 Estructura básica de la norma ISA 88. 2.2.5.1 Procedimiento del modelo ISA 88 Para precisar los modelos de proceso, físico y de control de procedimientos, se debe tener en cuenta las siguientes definiciones: 1. Etapa de proceso: parte de un proceso que opera independiente de otras etapas de proceso. Es el resultado de una secuencia planeada de cambios físicos o químicos en el material que está siendo procesado. 2. Operaciones de proceso: Conforman las etapas de proceso y representan actividades especializadas de procesamiento que resultan en un cambio físico o químico del material que está siendo procesado; pueden establecerse en un orden específico que se desarrolla para completar una etapa.. 32.
(33) 3. Acciones de proceso: Son las subdivisiones de las operaciones de proceso que desarrollan un conjunto de actividades menores para llevar a cabo el procesamiento requerido por cada operación de proceso. 4. Unidad: Conjunto de equipos de procesamiento y control necesarios para desarrollar actividades mayores de proceso. Operan relativamente independientes unas de otras. 5. Módulos de equipo: Una o varias piezas de equipo que pueden llevar a cabo un número finito de tareas específicas. Físicamente, pueden estar formados por módulos de control y otros módulos de equipo; deben ser parte de una unidad. 6. Módulos de control: Son los equipos que llevan a cabo las acciones de control básico. Típicamente, son una colección de sensores, válvulas, motores, actuadores y otros módulos de control que permiten establecer y mantener un estado específico de los equipos y procesos. 7. Procedimiento: Es el nivel superior en la jerarquía y define la estrategia para llevar a cabo una acción de procesamiento importante como hacer un batch. Está definido en términos de un conjunto ordenado de procedimientos de unidad. 8. Procedimiento de unidad: Consiste en un conjunto ordenado de operaciones que causa una secuencia de producción contigua que tendrá lugar dentro de una unidad. 9. Operación: Conjunto ordenado de fases que define una secuencia de procesamiento más importante que lleva el material en proceso de un estado a otro, y por lo general incluye un cambio físico o químico. 10. Fase: Es el elemento de control procedimental que puede llevar a cabo una tarea orientada a proceso. Una fase puede subdividirse en partes más pequeñas. La intención de la fase es ocasionar o definir una acción orientada a proceso.[12]-[13]. 33.
(34) 3. Metodología. Fig. 10 Estructura fundamental en proyectos de ingeniería [Fuente el Autor]. 4. Ingeniería Conceptual Corresponde a la primera etapa de un proyecto de ingeniería, en la cual se comprende el problema o necesidad específica que plantea el cliente en este caso la Universidad Distrital y se concibe una alternativa de solución al problema por parte de los proveedores (estudiantes de Ingeniería en Control). Esta etapa comprende los requerimientos que delimitan el alcance global y conceptual del proyecto, incluido el tipo de tecnología y especificación de equipos disponibles y/o de los equipos que se requieran para cumplir la necesidad del proyecto.. 4.1 Requerimientos Se debe crear una planta didáctica en el cual se integren los siguientes equipos que dispone el laboratorio de Industrial de la Universidad Distrital (Ver Tabla 2), para ser usada como herramienta de aprendizaje a manera de entrenador para la comunidad académica (estudiantes y docentes de la Facultad Tecnológica) en áreas relacionadas con instrumentación, control y automatización de procesos. Tabla 2 Equipos iniciales del proyecto Cantidad. Equipo. Descripción. 1. PLC. 1. Variador de Velocidad. 1. Módulo de Entradas Análogas. 34. Allen Bradley CompactLogix Cat. No. 1769-L23E-QB1B PowerFlex40 Cat. No. 22B-V5P0N104 Compact I/O Module 1769-IF4.
(35) 1. Fuente de Poder 24 VDC. 1. Guardamotor. 1. Pantalla HMI. 1. Fuente de Poder 24 VDC. 1. Switch Ethernet. Power Supply 30W Cat. No. IDEC PS5R-SC24 Contactor Allen Bradley Cat. No. 140M-D8E-C20 HMI Allen Bradley Cat. No. 2711P-T6C20A8 Power Supply 50W Cat. No. 1606-XLP50E Allen Bradley Stratix 2000 Cat. No.1783-US05T. 4.2 Alcance El alcance del proyecto consta de la construcción, adecuación, montaje y puesta en marcha de la planta de procesos análogos (PPA). Se deben seleccionar e instalar sensores para la medición de temperatura y nivel. A partir de un experimento de identificación establecer un modelo aproximado del sistema térmico y diseñar estrategias de control PID y On-Off en el PLC, para la supervisión y control de la temperatura en el tanque de agua fría de la planta por medio de la pantalla HMI, finalmente generar una serie de prácticas de laboratorio que validen los objetivos planteados al inicio del proyecto.. 4.3 Descripción preliminar del proceso La planta de procesos análogos contara con tres etapas fundamentales:. 1. Etapa de Calentamiento 2. Etapa de Mezcla 3. Etapa de Enfriamiento. En cada una de las etapas se deben seleccionar tanques para almacenamiento del líquido o fluido de proceso (agua), una bomba que impulse el líquido a través de las tuberías y válvulas de paso para interconectar los sistemas; seleccionar, adquirir e instalar sensores de tipo industrial; también sistemas mecánicos o eléctricos que permitan calentar o enfriar el líquido.. 35.
(36) 4.4 Normatividad Mediante la consulta de normas y estándares internacionales se definen y validan parámetros de diseño, selección e instalación de equipos, selección de redes de comunicación, etc. A continuación se presentan las normas utilizadas para algunos aspectos que intervienen en la planta:. ANSI/ISA–5.1–1984 (R1992) “Instrument Symbols and Identification” ISA–S5.3–1983 “Graphic Symbols for Distributed Control / Shared Display Instrumentation, Logic and Computer Systems” . ANSI/ISAS51.1–1979 (R1993) “Process Instrumentation Terminology” ANSI/ISA–S88.01–1995 “Batch Control Part 1: Models and Terminology” NEMA ICS 6–1993 (R2001, R2006) “Industrial Control and System Enclosures” IPTS–68 “The International Practical Temperature Scale 1968” IEC 60751 “Industrial Platinum Resistance Thermometers and Platinum Temperature Sensors” ITS–90 “The International Temperature Scale of 1990” ISO 9241 y EN 29241 "Ergonomics requirements of visual display terminals (VDT’s) used for office Tasks" ISA–S5.5–1985 "Graphic Symbols for Process Displays" ANSI/ISA–101.01–2015 “Human Machine Interfaces for Process Automation Systems” IEC 61131–3 “Programming Languages in Programmable Logic Controller (PLC)”. 4.5 Diagrama de flujo de proceso (PFD) A partir de la descripción preliminar del proceso se plantea el diagrama de flujo de proceso de la planta en la Fig. 11.. 36.
(37) Fig. 11 Diagrama de flujo de proceso de la planta [Fuente el Autor]. 5. Ingeniería Básica En la segunda fase del proyecto se desarrolla la alternativa de solución presentada en la ingeniería conceptual, allí se mostraran los diseños definitivos de la estructura física de la planta, los diagramas de instrumentación y tuberías (P&ID) y se realizará el listado de equipos que componen el proyecto.. 5.1 Descripción general de la planta La planta de procesos análogos (PPA) está conformada por una estructura metálica en la cual se encuentran (3) tres tanques en acrílico transparente de 5mm de espesor, de diferentes tamaños y formas (uno de forma cilíndrica y dos de forma cubica) están interconectados por tuberías que permiten el flujo de líquido (agua) proveniente de una bomba que esta acoplada a un motor trifásico de 0,75 HP, posee válvulas de tipo manual y solenoides, también cuenta son sensores de tipo industrial para medir variables de nivel y temperatura. 37.
(38) En el tablero de control se encuentran las conexiones eléctricas de los diferentes equipos que componen la planta, existen sistemas de protección para los actuadores (relés magnéticos), dos fuentes de alimentación 24 VDC y una fuente conmutada de 12 VDC, un variador de velocidad, un guardamotor, una pantalla HMI, un módulo de entradas análogas, un controlador lógico programable (PLC), un switch ethernet y borneras de conexión de entrada/salida para facilitar el cableado de los dispositivos. En la Fig. 12 se puede observar la planta diseñada en donde se evidencia la integración de los tres niveles iniciales de la pirámide de automatización.. Fig. 12 Planta de procesos análogos [Fuente el Autor]. 38.
(39) 5.2 Descripción del proceso El proyecto se centra en la identificación del modelo matemático aproximado del sistema térmico del tanque de agua fría (TK-100), la implementación de un controlador digital en el PLC para mantener la temperatura del tanque de suministro por medio de un intercambiador de calor (radiador) y a través de la pantalla HMI y el PLC se realizará un sistema de supervisión y control de la variable temperatura que interviene en el proceso. En la Fig. 13 se puede observar el diagrama de instrumentación y tubería (PI&D) de la planta basados en la norma ANSI/ISA-5.1-1984(R1992) [14] y la norma ISA-S5.3-1983 [15] respectivamente.. Fig. 13 Diagrama PI&D de la planta [Fuente el Autor] 39.
(40) La planta no está diseñada para ser una plataforma tipo batch, pero haciendo uso de la norma ANSI/ISA–S88.01–1995 [11] referente a este tipo de procesos se puede describir y relacionar la información del diagrama PI&D con el modelo físico que propone el estándar para jerarquizar los equipos de la planta en términos de células, unidades, módulos de equipos y módulos de control. A continuación se presenta en la Fig. 14 el modelo físico de la planta de procesos análogos.. Fig. 14 Modelo físico de la planta de acuerdo a la norma ISA88 [Fuente el Autor] 40.
(41) 5.3 Descripción de instrumentación y equipos En la Tabla 3 se describen los equipos e instrumentos que conforman la planta. Tabla 3 Instrumentación y equipos de la PPA Nombre. Descripción. Servicio. Tanque de Agua Fría (TK-100). Tanque de suministro fabricado en acrílico de 5mm de espesor, capacidad 45 Litros.. Enfriamiento. Válvula Manual (HV-100). Válvula de bola de ½ ’’, para permitir o no la circulación del fluido (agua). Enfriamiento. Bomba (P-100). Bomba acoplada a un motor trifásico de 3/4 HP, sirve para hacer circular el fluido (agua) a través de la tuberías hacia los diferentes tanques.. Enfriamiento. Válvula Manual de. Válvula de bola de 1/8 ’’ sirve de drenaje o. Drenaje (HV-101). purga de la bomba.. Sensor de Nivel Bajo. Sensor de tipo interruptor ON-OFF, para el nivel. (LAL 100). bajo del tanque de suministro.. Sensor de Nivel Alto (LAH 100). Sensor de tipo interruptor ON-OFF, para el nivel alto del tanque de suministro.. Sensor de Temperatura RTD PT100 (TE 100). Transmisor de Temperatura (TT 100). Intercambiador de Calor Radiador (E1). Sensor de Temperatura Termistor (TE 101). Transmisor de Temperatura (TT 101). Resistencia Térmica (HE 100). Fotografía. Sensor que registra la temperatura dentro del tanque de suministro.. Enfriamiento. Enfriamiento. Enfriamiento. Enfriamiento. Rango: -200 ºC a 950 ºC Señal de salida: 4-20 mA Voltaje de alimentación: 24 VDC Rango: 0 ºC a 50 ºC. Enfriamiento. Radiador de un vehículo, se usa para enfriar el líquido (agua). Voltaje Funcionamiento: 12 VDC. Enfriamiento. Sensor que registra temperatura de entrada del intercambiador de calor. Rango: -20 ºC a 150 ºC. Enfriamiento. Señal de salida: 0-10 VDC Voltaje de alimentación: 12 VDC Rango: -20 ºC a 150 ºC Resistencia de Inmersión, Potencia: 80 W Voltaje de alimentación: 110 VAC Ubicado en el tanque de Suministro.. 41. Enfriamiento. Enfriamiento.
Figure

![Fig. 10 Estructura fundamental en proyectos de ingeniería [Fuente el Autor]](https://thumb-us.123doks.com/thumbv2/123dok_es/7279938.347440/34.918.145.777.104.312/fig-estructura-fundamental-proyectos-ingeniería-fuente-autor.webp)
![Fig. 14 Modelo físico de la planta de acuerdo a la norma ISA88 [Fuente el Autor]](https://thumb-us.123doks.com/thumbv2/123dok_es/7279938.347440/40.918.118.803.327.1008/fig-modelo-físico-planta-acuerdo-norma-fuente-autor.webp)
+7
![Fig. 16 Diagrama de bloques de sistema de control On-Off [Fuente el Autor]](https://thumb-us.123doks.com/thumbv2/123dok_es/7279938.347440/45.918.116.812.745.947/fig-diagrama-bloques-sistema-control-off-fuente-autor.webp)


![Fig. 40 Datos de tiempo rampa aceleración y desaceleración programada en RSLogix5000 [Fuente el Autor]](https://thumb-us.123doks.com/thumbv2/123dok_es/7279938.347440/65.918.286.629.738.1013/datos-tiempo-aceleración-desaceleración-programada-rslogix-fuente-autor.webp)
![Fig. 46 Registro de temperatura del aire a la entrada del radiador [Fuente el Autor]](https://thumb-us.123doks.com/thumbv2/123dok_es/7279938.347440/69.918.239.684.147.367/fig-registro-temperatura-aire-entrada-radiador-fuente-autor.webp)
![Fig. 53 Curva de reacción de proceso planta en lazo abierto [Fuente el Autor]](https://thumb-us.123doks.com/thumbv2/123dok_es/7279938.347440/77.918.201.718.152.370/fig-curva-reacción-proceso-planta-abierto-fuente-autor.webp)
Documento similar