ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
UNIDAD PROFESIONAL “ADOLFO LÓPEZ MATEOS”CONTROL Y MONITOREO DE
TEMPERATURA VIA INTERNET
T E S I S
QUE PARA OBTENER EL TITULO DE
INGENIERO EN COMUNICACIONES Y ELECTRÓNICA
PRESENTAN:
CHRISTIAN ULISES PEREZ GONZALEZ
ADRIAN GONZALEZ RIOS
ALEJANDRO SANTANA OROZCO
AGRADECIMIENTOS
Al Instituto Politécnico Nacional por habernos brindado los medios necesarios para nuestra formación académica y por las facilidades otorgadas durante nuestra estancia en la Escuela Superior de Ingeniería Mecánica y Eléctrica Unidad Zacatenco.
Al Ing. Fernando Sánchez Martínez y al M. en C. Jorge Landa Hernández por dirigir nuestro trabajo de tesis, por compartir con nosotros sus conocimientos y su experiencia, además de sus críticas constructivas para mejorar el presente trabajo.
A nuestros profesores por haber despertado en nosotros el entusiasmo por el estudio, además de haber cedido gran parte de su tiempo apoyándonos en los diferentes aspectos de nuestra formación personal y profesional.
A cada uno de nuestros amigos y compañeros de la generación 2003-2007 por su apoyo, dentro y fuera de las aulas de la ESIME Zac. También por estar ahí en las buenas y malas, por todos y cada uno de los grandes momentos que vivimos con ellos y que nunca podremos olvidar: por su amistad.
Gracias!!!
Alejandro, Adrian y Christian
Sabiendo que jamás existirá forma de agradecer una vida de lucha y esfuerzo constante y dándo las gracias por no dejar de creer en mi, solo deseo que sepan que mi esfuerzo y todo lo hecho hasta ahora esta inspirado en ustedes, Alejandro Santana Marquez y Esther Orozco Enriquez.
Gracias a mis padres María de Lourdes Rios y Daniel González, por su cariño, comprensión y apoyo sin condiciones ni medida. Gracias por guiarme sobre el camino de la educación, por ser la fuente de mi inspiración y motivación para superarme cada día más y así poder luchar para que la vida me depare un futuro mejor.
Gracias a mis hermanos Alma y Daniel, por sus comentarios, sugerencias y opiniones. Además de ser unos buenos amigos, son la mejor compañía para compartir el mismo techo.
Gracias a Dulce, por tu apoyo, compresión y amor que me permite sentir poder lograr lo que me proponga. Gracias por escucharme y por tus consejos (eso es algo que lo haces muy bien). Gracias por ser parte de mi vida.
Adrian
No hay palabras que puedan describir mi profundo agradecimiento hacia mis
padres Genaro Pérez y Minerva González, quienes durante todos estos años
han confiado en mi, sin su apoyo no lo habría logrado, mil gracias por ser mis guías, y por ser para mi un ejemplo de trabajo, esfuerzo y dedicación. A ustedes les dedico el esfuerzo de estos años de estudio y de un aprendizaje que siempre llevaré,
A mis hermanos, Victor y Yahirt, por la compañía y el apoyo que siempre me
brindado, pese a las peleas que podamos tener sé que cuento con ustedes incondicionalmente. A ambos este esfuerzo personal les dedico.
INDICE
OBJETIVO………..1
JUSTIFICACION………1
INTRODUCCIÓN………...1
CAPITULO 1. TEMPERATURA……….3
1.1 Introducción de Temperatura………..…..3
1.2 Termómetro Bimetalico……….….4
1.3 Termómetro Resistivo………...….5
1.4 Termistores………..…7
1.5 Termopares………..7
1.5.1 Selección de Termopar………....10
1.6 Termómetros Infrarrojos………..10
1.6.1 Radiación Térmica: Principales Leyes………...10
1.6.2 Ley de Kirchhoff……….…11
1.6.3 Emisividad……….….11
1.6.4 Cuerpo Negro……….…12
1.6.5 Detectores de Radiación Térmica (Clasificación)………....12
1.6.6 Detectores de Cuantum………..….12
1.6.7 Detectores Térmicos……….12
1.6.8 Sensor Termo pila……….13
1.6.9 Bolometros………..13
1.6. 10 Sensores Activos Lejanos Al Infrarrojo (AFIR)…………..13
1.7 Termómetros de Unión de Semiconductores………...13
1.7.1 El Transistor Como un Sensor de Temperatura…………...14
1.7.2 Sensores de Temperatura Integrados………...14
1.7.3 Circuito Integrado: Sensor de Temperatura Digital…….…15
1.7.4 Circuito Integrado: Sensor de Temperatura de Salida Analógica………15
1.7.5 Sensor de Temperatura de Salida Digital………..15
1.7.6 Sistema de Circuitos Externos que Eliminan la Calibración………....……….15
1.8 Termómetros Piroelectricos………....16
1.8.1 Efecto Piroelectrico………...16
1.8.2 Sensores Piroelectricos………....16
1.9 Termómetro Líquido En Vidrio………...17
1.9.1 Descripción general……….….17
1.9.2 Efectos de Constante de Tiempo……….…..18
1.10 Termómetros Manometricos………..19
CAPITULO 2. PLANTAMIENTO DEL PROTOTIPO………...21
CAPITULO 3. ADQUISICION DE DATOS………..23
3.1 Adquisición de Datos Multifuncional por USB (National Instruments)……….……….24
3.1.1 Descripción del Hardware………25
3.1.2 Descripción del Software………..25
3.1.3 Accesorios Recomendados………...25
3.2 Control de Disparo………...26
3.2.1 Disparador para Tiristores………...26
3.2.2 Disparo Por Ángulo De Fase………..………28
3.2.3 Descripción de un Circuito Controlador de Disparo por Ángulo de Fase Mediante un Voltaje Análogo………29
3.3 Sensor LM35……….31
3.3.1 Descripción General………..31
3.4 Desarrollo………...….32
CAPITULO 4. LabVIEW……….34
4.1 Programa LabVIEW………...35
4.2 La Instrumentación Virtual………..36
4.3 Internet con LabVIEW………..36
4.3.1 Protocolo TCP-IP………...…37
4.3.2 Dirección IP………....37
4.3.3 Protocolo UDP………....38
4.4 DataSocket………38
4.5 Publicación en WEB……….40
4.5.1 Web Publishing Tool: web Server……….….41
4.5.2 VI Server……….43
CAPITULO 5. CONTROL………...45
5.1 Medición y Control Automático………46
5.2 Velocidad de respuesta………....47
5.3 Exactitud en la medición………...47
5.3.1 Error estático y reproducibilidad………...47
5.3.2 Error dinámico………...48
5.4 Cambio senoidal………...….48
5.5 Carga de proceso………..49
5.7 Controlador………...50
5.8 Acciones de Control Automático……….………50
5.8.1 Control Proporcional………..50
5.8.2 Control Integral………51
5.8.3 Control Derivativo……….…..51
5.8.4 Control Proporcional Integral………...….52
5.8.5 Control Proporcional Derivativo………...52
5.8.6 Control Proporcional Integral Derivativo………...52
5.9 Diseño de Controladores………..53
5.10 Sintonización de los controladores………..….53
5.11 Modelos……….55
5.11.1 Métodos basados en la curva de reacción del proceso….55 5.11.2 Métodos que utilizan la recta tangente……….56
5.11.2.1 Método de la tangente de Ziegler y Nichols………...….56
5.11.2.2 Método de la tangente modificado de Millar…….56
5.11.2.3 Métodos de dos puntos………....57
5.11.2.4 Método de Smith………...57
5.11.2.5 Método de dos Puntos General……….….58
CAPITULO 6. APLICACIÓN DE LA INVESTIGACION………..60
6.1 Desarrollo………60
6.2 Circuito Controlador de Disparo por Ángulo de Fase Mediante un Voltaje Análogo……….62
6.2.1 Cruce por Cero………..62
6.2.2 Generador de Rampas……….63
6.2.3 Circuito Disparador………...64
6.2.4 Circuito Final……….….65
6.3 Prototipo Final………66
6.4 Aplicación del Prototipo………67
CONCLUSIONES………....73
BIBLOGRAFIA……….74
OBJETIVO.
Mantener la temperatura de un proceso en los rangos deseados desde cualquier sitio, utilizando Internet.
JUSTIFICACION.
En los inicios de la era industrial, el control de los procesos se llevó a cabo mediante prueba y error basados en la intuición y en la experiencia acumulada por el operario. Mas tarde, el mercado exigió mayor calidad en el proceso de dichos productos lo que condujo al desarrollo de teorías para explicar el funcionamiento del proceso, de las que derivaron estudios analíticos que a su vez permitieron realizar el control de la mayor parte de las variables de interés en los procesos.
Es la temperatura una de las variables mas importantes de un proceso industrial ya que la gran mayoría de esta requieren el control y monitoreo de la temperatura, procesos como hornos, calderas de vapor, saunas, invernaderos, pasteurización, incubadoras por mencionar algunos.
En este trabajo estudiaremos y analizaremos esta importante variable de proceso industrial ya que si aprendemos a controlar una variable sabremos controlar a las demás. No solo la conoceremos a fondo sino que la controlaremos y como todo procesos necesitamos saber de ella, así que la monitorearemos y eso lo haremos con ayuda del Internet ya que actualmente es muy fácil acceder a el, es por eso que desde cualquier lugar con acceso a Internet se puede controlar nuestro proceso.
INTRODUCCIÓN.
Hay lugares donde es necesario el mantener una temperatura constante ò en donde es necesario el poder variar la temperatura de cierto recinto hasta un punto determinado. Esta temperatura a su vez debe estar siendo supervisada continuamente.
Conociendo el valor de temperatura a la que se encuentra nuestro recinto, es necesaria alguna acción de control que opere en nuestra área para así poder manejar la variable temperatura hasta un punto de referencia requerido.
Dentro de las diferentes maneras en que se puede controlar un proceso hay una por medio del software Labview. Labview es un tipo de software de Instrumentación Virtual que entre las diversas operaciones que puede hacer, es capaz de realizar acciones de control de cualquier tipo de variable.
Al software Labview se le proporciona la información necesaria sobre la variable de Temperatura. Con esta información y la programación realizada en el Software, se obtendrá el control del proceso. Todo este intercambio de información se debe de hacer por medio de algún sistema de adquisición de datos
El software Labview cuenta con un modulo de adquisición de datos que se conecta a la computadora por medio de un puerto USB. Esta tarjeta es la utilizada para proporcionar así como recibir información de la computadora.
Como en todo proceso, cuando se tiene el control, es necesario suministrarlo a la planta de operación, es aquí donde físicamente se vera un aumento ò una disminución de temperatura, dependiendo de la desviación a la temperatura de referencia requerida.
El estar en constante supervisión con la planta de proceso, da la necesidad a que se haga un monitoreo desde cualquier punto en donde nos encontremos.
CAPITULO 1. TEMPERATURA.
En este capitulo dedicado principalmente a la temperatura, estudiaremos y analizaremos esta importante variable de proceso industrial, También se analizaran las características de los diferentes tipos de sensores existentes hoy en día para medir la temperatura tomando en cuenta distintos fenómenos físicos que se ven influidos por la temperatura, para así elegir el mas adecuado, el cual será el usado en este proyecto
En los inicios de la era industrial, el control de los procesos se llevó a cabo mediante prueba y error basados en la intuición y en la experiencia acumulada por el operario. Mas tarde, el mercado exigió mayor calidad en el proceso de dichos productos lo que condujo al desarrollo de teorías para explicar el funcionamiento del proceso, de las que derivaron estudios analíticos que a su vez permitieron realizar el control de la mayor parte de las variables de interés en los procesos.
Es la temperatura una de las variables mas importantes de un proceso industrial ya que la gran mayoría de esta requieren el control y monitoreo de la temperatura, procesos como hornos, calderas de vapor, saunas, invernaderos, pasteurización, incubadoras por mencionar algunos.
En este trabajo estudiaremos y analizaremos esta importante variable de proceso industrial ya que si aprendemos controlar una variable sabremos controlar a las demás. No solo la conoceremos a fondo sino que la controlaremos y como todo procesos necesitamos saber de ella, así que la monitorearemos y eso lo haremos con ayuda del Internet ya que actualmente es muy fácil acceder a el, es por eso que estemos en el lugar donde estemos podemos saber de nuestro proceso en cualquier lugar que estemos.
Nuestro objetivo es mantener la variable temperatura de un proceso en los rangos deseados y poder monitorearla usando Internet.
1.1 Introducción de Temperatura.
La medición de la temperatura es una de las más comunes y puede ser una de las más importantes que se efectúan en los procesos industriales. Casi todos los fenómenos físicos están afectados por ella.
Existen diversos fenómenos físicos que se ven influidos por la temperatura y que son utilizados para medirla:
• Variaciones de los cuerpos (sólidos, líquidos o gases)
• Variación de resistencia de un semiconductor (termistores)
• f. e. m. creada en la unión de dos metales distintos (termopares)
• Intensidad de la radiación total emitida por el cuerpo (pirómetros de radiación)
1.2 Termómetro Bimetalico
Los termómetros bimetálicos se fundamentan en el coeficiente de dilatación de dos metales diferentes, tales como latón, acero y una aleación de ferroniquel laminados conjuntamente. Las láminas bimetálicas pueden ser rectas o curvas, formando espirales o hélices. Un termómetro bimetálico típico contiene pocas partes móviles.
El uso de termómetros bimetálicos es admisible para servicio continuo de 0 ºC a 400 ºC. La exactitud del instrumento es de ±1% y su rango de medida es de -200 a +500 ºC.
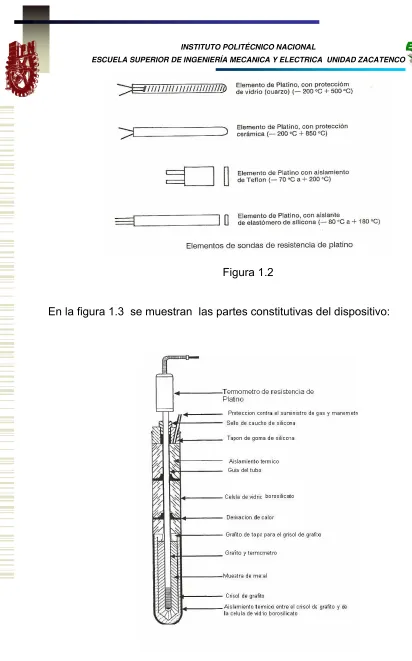
[image:10.612.143.472.479.653.2]El principio básico de un sensor bimetálico se muestra en la figura 1.1. Aquí, dos tiras de metal de diferente expansión térmica están unidos. Cuando la temperatura del metal se cambia, en ausencia de fuerzas externas, el sensor bimetálico tendrá la forma de un arco este hará que se expanda uno de los metales que es más expansible que el otro teniendo una forma de arco entre los dos metales.
1.3 Termómetro Resistivo.
Las sondas de resistencias poseen una característica resistiva en función de la temperatura siendo esta propia del elemento de detección.
La forma más común para la medición de temperatura es a través del uso de termómetros resistivos. Estos instrumentos eléctricos proporcionan lecturas exactas para la industria tales como los RTD’s dentro de un proceso de fabricación con una exactitud de ± 0.1 ºC. Mientras que los termómetros estándares de la resistencia de platino (SPRT’s) con una medida de exactitud de ± 0.0001 ºC.
La resistencia eléctrica proporciona cambios en los metales, ésta es conocida y confiable, dependiendo de su elevación o caída en temperatura. Si sube la temperatura, la resistencia eléctrica del metal aumenta. Si disminuye también lo hace la resistencia eléctrica. Un RTD se caracteriza por lo siguiente:
Alto coeficiente de temperatura de la resistencia, ya que de este modo el instrumento de medición será muy sensible.
Alta resistividad, ya que cuanto mayor sea la resistencia a una temperatura dada, mayor será la variación por grado; mayor sensibilidad.
Relación lineal resistencia-temperatura.
Rigidez y ductilidad, lo que permite realizar los procesos de fabricación de estirado y arrollamiento del conductor en las bobinas de la sonda a fin de obtener tamaños pequeños (rapidez de respuesta).
En la operación, el instrumento mide una corriente que es constante con el RTD. Cuando la temperatura cambia, la resistencia también cambia y es proporcional con el voltaje que se mide.
Este tipo de sensores se conectan a puentes de Wheatstone convencionales y a otros circuitos digitales. El puente de Wheatstone esta dispuesto en montajes denominados de dos hilos, de tres hilos o de cuatro hilos, según sean los hilos de conexión de la sonda de resistencia al puente.
El platino es el material más adecuado desde el punto de vista de exactitud y de estabilidad pero presenta el inconveniente de su costo.
Figura 1.2
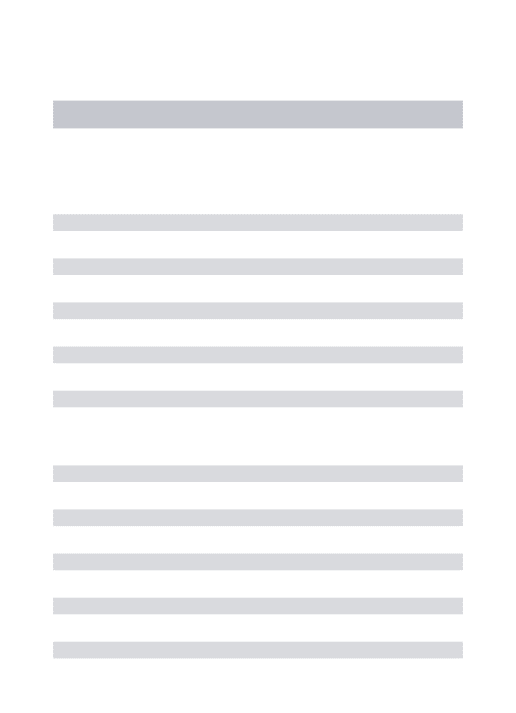
En la figura 1.3 se muestran las partes constitutivas del dispositivo:
[image:12.612.200.417.355.636.2]1.4 Termistores.
Son semiconductores electrónicos que tienen un coeficiente de temperatura de resistencia negativo de valor elevado, por lo que presentan unas variaciones rápidas y extremadamente grandes para cambios relativamente pequeños en la temperatura. Los termistores se fabrican con oxido de níquel, manganeso, hierro, cobalto, cobre, magnesio, titanio y otros metales y están encapsulados en sondas y discos.
Los termistores se denominan también NTC (Negative Temperature Coefficient, coeficiente de temperatura negativo) existiendo casos especiales de coeficiente positivo cuando su resistencia aumenta con la temperatura (PTC, Positive Temperature Coefficient).
Los termistores se conectan a puentes de Wheatstone convencionales o a otros circuitos digitales de medición de resistencia. En rangos amplios de temperatura, los termistores tienen características no lineales. Al tener un alto coeficiente de temperatura poseen una mayor sensibilidad que las sondas de resistencia y permiten incluso intervalos de medida de 1 ºC. Los termistores son de pequeño tamaño y su tiempo de respuesta depende de la capacidad entre el termistor y el instrumento de medición que puede ser considerada siempre que el elemento posea una alta resistencia comparada con la de los cables de unión. La corriente que circula por el termistor a través del circuito de medida debe ser baja para garantizar la variación de la resistencia del elemento, debida exclusivamente a los cambios de temperatura en el proceso.
Los termistores tienen su principal aplicación de medición, en la compensación y el control de temperatura y como medidores de temperatura diferencial.
1.5 Termopares.
Por su simplicidad y bajo costo, son los elementos más usados en la medición de temperatura en la industria.
Se basan en el Efecto Seebeck (el efecto Seebeck es el único que convierte energía térmica a energía eléctrica), que dice que si unimos los extremos de dos metales diferentes y establecemos una diferencia de temperatura entre ellas, circulará una corriente proporcional a la diferencia de las temperaturas. Al tener dos materiales diferentes, la densidad de electrones libres en cada uno de ellos es también diferente. Un incremento de temperatura provoca un aumento en la energía cinética, permitiendo que los electrones libres de un material puedan migrar al otro, generando un campo eléctrico.
La lectura estará en función de la diferencia de temperaturas, por lo tanto las variaciones de la temperatura ambiente ocasionarán cambios en la medición, aún cuando la unión caliente, se mantenga a temperatura constante. Por lo que, para mediciones repetitivas tenemos que recurrir a una de las siguientes técnicas:
- Medir la temperatura ambiente y sumársela a la obtenida mediante la lectura
- Mantener la junta fría a una temperatura constante, por ejemplo 0 °C.
[image:14.612.128.473.293.454.2]La figura 1.4 muestra un circuito de un termopar básico con una unión de referencia singular. El Voltaje por el efecto Seebeck medido en el circuito abierto (terminales f y a), es proporcional a la diferencia de temperatura entre el termopar de la unión b y la temperatura de la unión de referencia e. Por conveniencia, Tr, es comúnmente llevada a 0 C
Figura 1.4 La base del termopar del circuito es con un solo cruce de la temperatura
como referencia.
Toda combinación de metales responde al efecto Sebla Seebeck, sólo tres de estas combinaciones han dado buenos resultados prácticos y se encuentran bajo normas. Estos son los Tipo J, K y S
Tipo Rango Nominal
J 210 a 760 °C
K 270 a 1372 °C
[image:14.612.239.452.557.669.2]S 50 a 1768 °C
Tabla 1.1 Tipo de Materiales y su Rango de Operación
que los mantenga separados. El diámetro del alambre debe ser grande si se desea larga vida útil en ambientes hostiles y debe ser pequeño si se desea un tiempo de respuesta rápido.
Las leyes principales que rigen su funcionamiento son:
1) Ley de Homogeneidad del circuito: No se puede obtener corriente calentando un solo metal. (Efecto Thompson )
2) Ley de Metales Intermedios: La sumatoria de las diferencias de potencial térmicas es cero en un circuito con varios metales, si estos están a temperatura uniforme.
Existen varias reglas a recordar en el empleo de estos sistemas:
a) Para asegurar una operación estable y adecuada en el termopar, las características termoeléctricas de conductores deben mantenerse a todo lo largo de los mismos (uniformidad).
b) La sensibilidad termoeléctrica de la mayoría de los metales no es lineal con la variación de temperatura.
Es fundamental la prolongación de los alambres de termopares, muchas veces hasta la junta de referencia que puede estar lejos de la junta de medición y no siempre afectada por altas temperaturas como en el caso de los alambres del termopar. Es allí donde aparece el uso de los cables compensados. Su misión es únicamente la de trasladar la junta de referencia hasta un lugar adecuado (de temperatura estable o conocida) y luego utilizar, para compensar el error, cualquiera de los dos primeros sistemas de compensación de junta fría mencionados.
La finalidad del cable compensado es llevar el sistema de compensación automática hasta un lugar con temperaturas inferiores a 60º C, ya que todos estos sistemas son electrónicos y trabajan con temperaturas ambiente entre -10º C y 60º C.
Los cables compensados reproducen las misma curvas de respuesta y de tolerancia mV/ºC, que las del termopar entre 0 y 200º C. Se les utiliza sólo por razones económicas ya que su composición química difiere de las aleaciones del termopar, buscándose entonces que los materiales sustitutos sean más económicos que éstos.
1.5.1 Selección de Termopar.
No es posible evitar el deterioro de los termopares a temperaturas altas. Mientras mayores sean éstas y más desfavorables las condiciones de operación será más rápido el daño. Una atmósfera altamente agresiva, reduce la vida del termopar. Esta condición se encuentra con alguna frecuencia y se puede notar su existencia por el aspecto del alambre del termopar. Se forma una gran cantidad de oxidación que fácilmente se desmorona.
No es recomendable usar un termopar cuando el sitio de medición y el instrumento están lejos (más de 10 a 20 metros de distancia). El problema del termopar es que suministran un voltaje muy bajo y susceptible a recibir interferencias eléctricas. Además para hacer la extensión se debe usar un cable compensado para el tipo específico de termopar lo que aumenta el costo de la instalación.
Tampoco es recomendable usar un termopar cuando es necesaria una lectura de temperatura muy precisa (décimas de ºC) pues la compensación de cero requerida por los termopares introduce un error típicamente del orden de 0.5 ºC
Otro problema que puede ocurrir con los termopares es que alguna contaminación u oxidación en los metales de la unión podrían provocar una lectura errónea (hasta 4 ó 5 ºC) sin que se detecte la falla.
1.6 Termómetros Infrarrojos
1.6.1 Radiación Térmica: Principales Leyes
Como sabemos cada átomo y cada molécula están en constante movimiento. Cuando un átomo se mueve y choca con otro átomo le transfiere parte de su energía cinética, éste pierde algo de su propia energía en este choque. Mientras que el átomo con menor energía cinética, después de la colisión gana algo de energía. El promedio de la energía cinética de las partículas agitadas esta representada por la “Temperatura Absoluta”, la cual es medida en grados kelvin y es la llamada Temperatura, la cual es una medida del movimiento atómico.
Las ondas Electromagnéticas están caracterizadas por su intensidad y longitud de onda, ambas características se relacionan con la temperatura. Por lo que objetos muy calientes tienen una menor longitud de onda y radían energía electromagnética en la parte visible del espectro - longitudes de onda entre 0.4 µm (azul) y 0.7 µm (rojo) – por ejemplo el filamento de una lámpara es tan caliente que emite una frecuencia en el rango visible.
Es lógico que uno pueda determinar que la temperatura de los objetos se mide si la intensidad de radiación electromagnética emanada por sus características espectrales. Esto es la base de los medidores de temperatura por medio del no-contacto (medición indirecta), que son conocidos por varios nombres, dependiendo de la aplicación, por ejemplo: Termómetros infrarrojos (usados para altas temperaturas) y Pirómetro (usado para bajas temperaturas).
1.6.2 Ley de Kirchhoff
Mientras que la longitud de onda de la luz radiada depende de la temperatura, la magnitud de radiación esta en función de la propiedad de la superficie. Esta propiedad es la llamada emisividad, es medida en una escala de 0 a 1. Reflexividad y transparencia, están también en la escala de 0 a 1, estas muestran qué porción de luz es reflejada.
1.6.3 Emisividad
La emisividad de un material esta en función de su constante dieléctrica. La emisividad depende de la longitud de onda, por ejemplo una hoja de papel blanco es mucho más refractiva en el rango espectral visible y no emite luz visible.
La emisividad de los dieléctricos es alta y la de los metales es baja. Debido a la alta emisividad de los dieléctricos, se prestan fácil para mediciones de temperatura de no-contacto. De otra forma la medición de metales no oxidantes es difícil, debido a su baja cantidad de flujo infrarrojo emanado.
1.6.4 Cuerpo Negro
Por definición la más alta emisividad es la unidad y por lo tanto es atribuida al llamado cuerpo negro, este es un emisor ideal de radiación electromagnética. Si el objeto es opaco (γ=0) y no refractivo (ρ=0), llega a ser un emisor ideal y absorbe la radiación electromagnética. En realidad un cuerpo negro no existe. Un cuerpo negro muy práctico (donde ξ es de alrededor de 0.99 o un poco más alta) es una herramienta esencial para la calibración de termómetros infrarrojos.
Un cuerpo negro puede ser fabricado de diferentes formas. El cobre es el material utilizado para la cavidad del cuerpo negro, gracias a su alta conductividad térmica, la cual ayuda a igualar la temperatura en cada una de sus paredes.
1.6.5 Detectores de Radiación Térmica (Clasificación)
Generalmente hablando hay dos tipos de sensores (detectores) conocidos por su capacidad a responder a la radiación térmica, estos se encuentran entre el rango espectral cercano al infrarrojo y lejano al infrarrojo; que están aproximadamente entre 0.8µm y 40µm. El primer tipo es el conocido como detector de quantum y el segundo es el tipo conocido como detector térmico. Este último es subdividido en pasivos (PIR) y activos (AFIR).
1.6.6 Detectores de Cuantum
Su operación esta basada en el efecto fotoeléctrico, el cual fue descubierto por Einstein.
Cuando un fotón de frecuencia ν1 choca con un cristal semiconductor, su energía será bastante alta para separar el electrón de su posición en la banda de valencia y ponerlo en una nueva banda de conducción donde es más alto su nivel de energía. En esta nueva banda el electrón es libre y sirve como un transportador de corriente.
1.6.7 Detectores Térmicos
1.6.8 Sensor Termo pila
Las Termopilas corresponden a la clase de detectores PIR. Su funcionamiento principal es el mismo que en el termopar. De hecho una termopila puede ser definida como termopares conectados en serie. Fue inventado por Joule para incrementar la señal de salida de un sensor termoeléctrico. Donde su primera aplicación es la detección de radiación térmica.
1.6.9 Bolometros
Este sensor es un RTD en miniatura, el cual es comúnmente usado para medir valores rms de señales electromagnéticas en el rango del espectro muy cerca al infrarrojo. Convierte cambios de resistencia en cambios de voltaje. Su funcionamiento está basado principalmente en la relación entre la señal electromagnética absorbida y la potencia disipada. Son sensores de respuesta lenta, por lo que son usados cuando la respuesta no es requerida de forma rápida.
1.6.10 Sensores Activos Lejanos Al Infrarrojo (AFIR)
En este tipo de sensores, el proceso de medición de flujo de radiación térmica es diferente a los antes descritos (detectores pasivos PIR). La superficie del sensor AFIR es controlada por un circuito especial para tener una temperatura definida, que en muchas aplicaciones, es mantenida constante durante la medición del proceso entero. Para controlar la temperatura de la superficie del sensor, una potencia eléctrica es suministrada. Para regularla el circuito mide la temperatura de la superficie del elemento y la compara con una referencia interna.
1.7 Termómetros de Unión de Semiconductores
Estos sensores de Temperatura son fácilmente construidos con semiconductores usando las características de la unión PN. La sensibilidad de la temperatura de la unión PN es totalmente predecible sobre el rango de operación de los semiconductores de –55ºC a 150ºC.
una función lineal de la temperatura absoluta. Esta variación de voltaje esta regido por un coeficiente de temperatura aproximadamente de 2 mV /ºC.
El coeficiente de temperatura de un sensor semiconductor comparada con el de un RTD, es más grande.
1.7.1 El Transistor Como un Sensor de Temperatura.
Un semiconductor común para sensar temperaturas es el transistor 2N2222 o un 2N3904.
[image:20.612.247.363.307.445.2]La figura 1.5 muestra un transistor Bipolar configurado como un sensor de temperatura. La base del transistor es puesta en corto circuito al colector. Una corriente constante fluye en la unión PN (de la base al emisor) y así el voltaje Vf entre la base y el emisor es el proporcional a la temperatura.
Figura 1.5 El transistor bipolar se configura como un sensor de temperatura.
La capacidad para obtener sensores de temperatura usando semiconductores tiene dos significantes consecuencias:
- Estos circuitos integrados diseñados pueden ser usados para mejorar la operación de los sensores de temperatura para algunas aplicaciones especificas
- Estos sensores de Temperatura pueden ser integrados con otros circuitos para obtener características adicionales.
1.7.2 Sensores de Temperatura Integrados
mejoras posibles. A continuación serán discutidos tres ejemplos de circuitos integrados y un ejemplo de circuito externo.
1.7.3 Circuito Integrado: Sensor de Temperatura Digital
Sensor de temperatura de unión de semiconductores de una sola pieza (LM75 de National Semiconductor) tiene varias características incluyendo una salida digital. La señal análoga del sensor de temperatura es convertida a formato digital. Esta señal digital se comunica con el microprocesador por medio de una interfaz. Por su salida estos sensores pueden usar algun software de programación que puede ser usado para alguna operación de control.
Tiene una resolución de ±0.01°C y la exactitud en el rango de -25°C a 100°C. El sensor consume solo 250 µA durante la operación y en estado inactivo ocupa solo 10 µA.
1.7.4 Circuito Integrado: Sensor de Temperatura de Salida Analógica
El TMP-1 es un circuito integrado sensor de Temperatura, es un sensor programable de temperatura, tiene una salida de 5 mV/ C. EL TMP-1 esta diseñado para una operación entre -55ºC a125ºC, con ±1ºC de exactitud sobre el rango mencionado.
1.7.5 Sensor de Temperatura de Salida Digital
Sensor diseñado para múltiples mediciones. Cuenta con una memoria que identifica la temperatura de un sensor particular en un sistema de medición, con varios sensores que suministran las lecturas desde diferentes localizaciones, Esta señal puede ser transmitida hasta una distancia de 300 m. Este sensor de Temperatura opera desde los -55ºC a 125ºC.
1.7.6 Sistema de Circuitos Externos que Eliminan la Calibración
Un circuito muy usual es el integrado LTC1043 usado para suministrar de 0 C a 100 C una salida de 0V a 10V, con una exactitud de ±1 C, usando una señal común de un transistor que actúa como sensor de temperatura.
1.8 Termómetros Piroelectricos.
1.8.1 Efecto Piroelectrico.
Los materiales piroeléctricos son sustancias cristalinas capaces de generar una carga eléctrica en respuesta al flujo del calor. El efecto piroeléctrico se relaciona muy de cerca con el efecto piezoeléctrico. El nombre fue dado en asociación con la sustancia ferromagnética.
Un cristal se considera piroeléctrico si se exhibe una temperatura de polarización – espontánea.
Un material piroeléctrico se puede considerar una composición de una gran cantidad de cristalitos, donde cada uno se comporta como dipolo eléctrico pequeño. Todos estos dipolos se orientan aleatoriamente, sin embargo, a lo largo de una dirección preferida, sobre cierta temperatura, conocida como el punto del curie.
Cuando la temperatura de un material piroeléctrico cambia, el material se polariza, es decir, una carga eléctrica aparece en su superficie. Debe ser entendido claramente que la polarización ocurre no en función de temperatura, sino solamente como función de un cambio en la temperatura del material.
Hay varios mecanismos por los cuales los cambios en temperatura darán lugar a los sensores piroeléctricos. Los cambios de temperatura pueden causar el acortamiento o el alargamiento de dipolos. Puede también afectar en forma aleatoria a las orientaciones del dipolo debido a la agitación termica. Este fenómeno se llama piroeléctrico primario. Hay también el piroeléctrico secundario que, de una manera simplificada, se puede describir como resultado del efecto piezoeléctrico; es decir, un desarrollo de la tensión en la extensión termal del debido material.
1.8.2 Sensores Piroelectricos.
El detector no requiere ninguna excitación eléctrica externa (señal de la excitación). Necesita solamente un circuito de interfaz electrónico apropiado para medir la carga. El contrario a los termoeléctricos son los termopares, que producen un voltaje constante cuando dos ensambladuras disímiles del metal se llevan a cabo en temperaturas constantes pero diversas variantes, mientras un dispositivo piroeléctrico es un detector del flujo del calor más que un detector del calor.
Los sensores piroeléctricos son útiles siempre y cuando que cambien sin necesidad de la radiacióno del flujo del calor a ser medido
1.9 Termómetro Líquido En Vidrio.
Es el termómetro más conocido. Este termómetro responde a presión. Estos termómetros tuvieron una evolución en el desarrollo de la termometria. Están dentro el rango de temperaturas de -190 C a 600 C y son capaces de medir de temperatura en milikelvin.
Estos termómetros son usados para comprobar la operación de otros nuevos sensores de temperaturas debido a su gran exactitud. Suministra una temperatura estable referida una exactitud de 0.1 C
1.9.1 Descripción general
Figura 1.6 Tallo sólido del termómetro de vidrio.
Los termómetros de mercurio más exactos están graduados y calibrados para inmersión total; esto es, con todo el mercurio, incluyendo el del tubo, a la temperatura que se está midiendo. Si parte del mercurio de la columna se extiende fuera de la región en que se ha de medir la temperatura, hay que aplicar una corrección a la lectura, basada en la longitud en grados de la columna emergente, en la diferencia de temperatura entre la columna emergente y el bulbo y en la dilatación relativa del mercurio y del vidrio
Los de mercurio pueden funcionar en la gama que va de -39 °C (punto de congelación del mercurio) a 357 °C (su punto de ebullición), con la ventaja de ser portátiles y permitir una lectura directa.
El termómetro más utilizado es el de mercurio, formado por un capilar de vidrio de diámetro uniforme comunicado por un extremo con una ampolla llena de mercurio. El conjunto está sellado para mantener un vacío parcial en el capilar. Cuando la temperatura aumenta el mercurio se dilata y asciende por el capilar. La temperatura puede leerse en una escala situada junto al capilar. El termómetro de mercurio es muy usado para medir temperaturas ordinarias; también se emplean otros líquidos como alcohol o éter.
1.9.2 Efectos de Constante de Tiempo
constante de tiempo relativamente corto. Entonces el bulbo es determinado por la sensibilidad requerida en el termómetro.
1.10 Termómetros Manometricos
Estos termómetros son definidos como aquellos que usan la opresión del gas para obtener una temperatura determinada. Termómetros de este tipo no son fácilmente encontrados comercialmente, por ejemplo: el control de temperatura de una casa es de este tipo.
El rango de temperatura que deben cubrir estos tipos de termómetros depende del principio y la sustancia usada.
1.10.1 Termómetros de gas.
El termómetro de gas de volumen constante es muy exacto y tiene un margen de aplicación extraordinario: desde - 27 °C hasta 1477 °C. Pero es más complicado, por lo que se utiliza más bien como un instrumento normativo para la graduación de otros termómetros.
El termómetro de gas a volumen constante se compone de una ampolla con gas -helio, hidrógeno o nitrógeno, según la gama de temperaturas deseada- y un manómetro medidor de la presión. Se pone la ampolla del gas en el ambiente cuya temperatura hay que medir y se ajusta entonces la columna de mercurio (manómetro) que está en conexión con la ampolla, para darle un volumen fijo al gas de la ampolla. La altura de la columna de mercurio indica la presión del gas. A partir de ella se puede calcular la temperatura.
En un termómetro de gas de volumen constante el volumen del hidrógeno que hay en una ampolla metálica se mantiene constante levantando o bajando un depósito. La altura del mercurio del barómetro se ajusta entonces hasta que toca justo el indicador superior: la diferencia de los niveles (h) indica entonces la presión del gas y a su vez, su temperatura.
el error de Volumen Muerto, el volumen del bulbo debe ser incrementado significativamente.
Figura 1.7 Disposición general de un termómetro manométrico
CAPITULO 2. PLANTAMIENTO DEL PROTOTIPO
En este capitulo entablaremos el planteamiento de nuestro prototipo introduciéndonos a su comportamiento y operación.
Los procesos industriales exigen el control de la fabricación de diversos productos obtenidos. Los procesos son muy variados y abarcan muchos tipos de productos: como la fabricación de los productos derivados del petróleo, de los productos alimenticios, la industria cerámica, las centrales generadores de energía, la siderurgia, los tratamientos térmicos, la industria papelera, la industria textil. Etc.
En todos estos procesos es absolutamente necesario controlar y mantener variables, como son: presión, nivel, conductividad, velocidad, pero sobre todo temperatura. Ya que los instrumentos de medición y control permiten el mantenimiento y la regulación de estas constantes en condiciones mas idóneas que las que el propio operador podría realizar.
En los inicios de la era industrial, la operación de los procesos se llevaba a cabo con un control manual, ya que antes solo se utilizaban instrumentos sencillos pero de gran ayuda como son manómetros, termómetros, válvulas, etc.
En este trabajo nos enfocaremos únicamente en la variable temperatura, simularemos una planta para que podamos manipular y ver como se comporta esta variable.
El primer problema fue conocer la variable como tal ¿Qué es temperatura?, ¿Tipos de sensores de temperatura?, características, aplicaciones de cada sensor, etc.
Lo siguiente fue hacer la planta como tal, y surgió una interrogante y es ¿Qué pasaría si hay perturbaciones? ¿Qué modulo de adquisición de datos íbamos a usar?
Para la lectura de la variable se utilizo electrónica analógica y para la parte de adquisición se utilizo un software de instrumentación virtual para controlar la variable digitalmente.
ventilador (la entrada del pvc) en el interior del pvc se encuentra un serpentín de cobre conectado en uno de esos extremos a una bomba de agua con el fin de provocar perturbaciones de aire frió para acelerar el enfriamiento del recinto.
Ahora hablemos de nuestro control. El control estará dado por una instrumentación virtual con ayuda del software de Lab View, cuando hablamos de instrumentos de medida, es normal pensar en una carcaza rígida en la que se destaca su panel frontal, en la cara oculta del panel están los contactos de los controladores del panel que unen físicamente con la circuiteria interna. Pero cuando hablamos de VI (instrumentos virtuales) nos referimos a un modulo de sortware que simula el panel frontal de instrumento como nos referimos anteriormente, pero este VI, se apoya de elementos de hardware accesibles por el computador (tarjetas de adquisición, tarjetas DSP, instrumentos accesibles vía GPIB, VXI, RS-232, USB, ethernet) que realiza una serie de medidas como si se tratase de un instrumento real.
De este modo, cuando se ejecuta un programa que funciona como instrumento virtual o VI, el usuario ve en la pantalla de su computadora un panel cuya función es idéntica a la de un instrumento físico, facilitando la visualización y el control del aparato.
En LabVIEW a diferencia de otros programas de VI que la programación se basa vía grafico y no texto, facilitando por ejemplo los elementos del panel frontal. Cuando un control es “dibujado” en el programa desde la librería en el panel frontal se acaba de crear una variable cuyos valores vendrán determinados por lo que el usuario ajuste desde el panel; inmediatamente aparecen una terminal en la ventana de programación representándolo.
Es indiscutible que el Internet está presente, en las acciones diarias de nuestra vida y que nos vayamos introduciendo con gran facilidad a todos los niveles de acción.
Con LabVIEW la publicación y distribución de datos, que genera la aplicación a través de Internet es sencilla es por eso que también escogimos trabajar con LabVIEW.
CAPITULO 3. ADQUISICION DE DATOS.
En este capitulo se hablara la manera en que se puede obtener o generar información de manera automatizada desde recursos de medidas analógicas y digitales como sensores y dispositivos bajo prueba. Se analizara alguna manera más eficiente de obtener datos del proceso a la computadora por medio de módulo de Adquisición de Datos y un software con el que se pueda controlar nuestro proceso
Adquisición de datos es el proceso de obtener o generar información de manera automatizada desde recursos de medidas analógicas y digitales como sensores y dispositivos bajo prueba. Utiliza una combinación de hardware y software basados en PC para brindar un sistema de medida flexible y definido por el usuario. A menudo, es necesario acondicionar sensores y señales antes que un dispositivo de adquisición de datos los adquiera.
La Adquisición de Datos consiste en tomar un conjunto de variables físicas, convertirlas en voltajes y digitalizarlas de manera que se puedan procesar en una computadora. Se requiere una etapa de acondicionamiento que adecua la señal a niveles compatibles con el elemento que hace la transformación a señal digital. El elemento que hace dicha transformación es la tarjeta o módulo de Adquisición de Datos. Una vez que las señales eléctricas se transformaron en digitales, se envían a través del bus de datos dentro de la memoria del PC, se las puede procesar con un programa de aplicación adecuado al uso que el usuario desea, archivarlas en disco duro, graficarlas en pantalla, enviarlas por modem-fax, imprimirlas por impresora, o puedes ser manipuladas desde Internet.
De la misma manera que se toma una señal eléctrica y se transforma en una digital para enviarla al ordenador, se puede también tomar una señal digital o binaria y convertirla en una eléctrica, en este caso el elemento que hace la transformación es una tarjeta o módulo de Adquisición de Datos de salida, o tarjeta de control. La señal dentro de la memoria del PC la genera un programa adecuado a las aplicaciones que quiere el usuario y luego de procesada es recibida por mecanismos que ejecutan movimientos mecánicos, a través de servomecanismos, que también son del tipo transductores.
Un sistema típico de adquisición utiliza sensores, transductores, amplificadores, convertidores analógicos a digital (A/D) y digital analógico (D/A), para procesar información acerca de un sistema físico de forma digitalizada.
Y sus usos son variados dependiendo del tipo de aplicación que se le va a dar, entre los más comunes destacan los siguientes:
Todo tipo de industrias Grandes Hoteles Sanatorios y Hospitales Bancos
Agroindustrias
Laboratorios de Medición y Pruebas Control de Calidad
Detección de Fallas Control de máquinas Control de producción Automatización Aeroespacio Nanotecnología Biotecnología
3.1 Adquisición de Datos Multifuncional por USB (National Instruments)
[image:30.612.128.480.538.649.2]En nuestro trabajo utilizaremos la tarjeta de adquisición (NI USB-6008) de Multifunción por USB de 12 bits a 10 kS/s, ya que fue elegida por su fácil uso práctico para estudiantes ya que con ella podemos sustituir la simulación de mediciones y automatizaciones teóricas para hacerlas practicas y digitales. Se escogió el software de LabVIEW y no otras por que su modo grafico facilita el trabajo, es muy parecido al de Simulink de Matlab, pero el de LabVIEW lo hace mas grafico y didáctico, además de que lo aprendimos a utilizar como practicas de laboratorio en las clases de la especialidad de control y como las dos son de la misma compañía lo hace compatible. En la figura 3.1 se muestra como es la conexión de la tarjeta de LabVIEW. En diagrama a bloques.
Características:
• Ocho canales de entrada analógica de 12 bits, 12 líneas DIO, 2 salidas analógicas, 1 contador
• Considere el NI 6210 y NI USB-6211 para un mayor rendimiento
• Alimentación de energía por el bus para mayor comodidad y portabilidad
• Obtenga los paquetes que tienen una tarjeta para aplicaciones OEM
3.1.1 Descripción del Hardware
El modulo de adquisición de datos multifuncional USB-6008 de National Instruments provee una adquisición de datos confiable a un bajo precio. Con una conectividad USB plug-and-play, este módulo es lo suficientemente simple para realizar mediciones rápidas pero lo suficientemente versátil para aplicaciones de medición más complejas.
3.1.2 Descripción del Software
El modulo NI USB-6008 usa el software NI-DAQmx de alto rendimiento, el cual es un software multilectura para una configuración interactiva y una adquisición de datos en los sistemas operativos Windows. Para usuarios de Max OS X y Linux pueden descargar NI-DAQmx Basico, el cual es un software con una interfaz de programación del NI-DAQmx limitada.
3.1.3 Accesorios Recomendados
3.2 Control de Disparo
En esta parte implementaremos una interfaz de potencia para controlar a la planta utilizando un TRIAC y un Optocoplador.
3.2.1 Disparador para Tiristores.
Un circuito que contenga un SCR o un TRIAC debe ser capaz de proveer un adecuado voltaje y corriente de compuerta sin exceder su máxima disipación de potencia en la compuerta. Ya que este debe limitar la energía requerida para la terminal (tarjeta de adquisición de datos). También, debe proveer aislamiento de la línea eléctrica de tal forma que el común del circuito de control no necesite ser conectado a la línea neutral. Sin embargo, es necesario para que el tiristor sea disparado con un pulso referenciado a su cátodo (MT1). Esto sugiere que el cátodo y el común de control sean conectados a la línea de potencia neutral (esto podría ser peligroso ya que una simple conexión incorrecta podría aplicar la línea de voltaje al común de la red de control que en nuestro caso es una computadora). Recomendamos ampliamente el aislamiento entre el común de control y cualquier terminal de potencia haciendo que el pulso de disparo del SCR que esta acoplado. Ya sea mediante un transformador de pulso o un acoplador óptico.
[image:32.612.202.415.525.597.2]En la figura 3.2 se muestra el diagrama esquemático y y se describe cada uno de los pinesdel MOC3030. Este dispositivo consiste que internamente contiene un interruptor bilateral de silicio activado por luz que esta ópticamente acoplado a un diodo emisor de luz (LED). Cuando el LED se prende, se activa el interruptor. Mediante el manejo del LED a 60 Hz y sobre el intervalo de tiempo de 80 µs, se pueden suministrar corrientes de disparo del orden de 600 mA a la computadora del SRC o el TRIAC.
Figura 3.2. Manejador de TRIAC acoplado ópticamente, MOC 3030.
del LED de 30 mA, con una caída de voltaje a través del mismo de aproximadamente 4Volts. Esto ocurre cuando la salida del comparador cambia a una lógica baja, por lo que fluye una corriente por el LED. Su valor es fijado por la fuente de alimentación, la caída a través del LED (2 a 4V) y el tamaño de la resistencia limitadora 1.5V. este voltaje es muy pequeño para mantener encendido al interruptor bilateral del MOC 3030, por lo que se apaga. Esto es muy conveniente, lo que permite pulsos de corriente en compuerta grandes procedentes del MOC 3030, sin requerir ninguna red generadora de pulsos.
Figura 3.3. Circuito de interface manejador comparador-triac.
El MOC 3030 puede ser manejado directamente por lógica de colector abierto. En la figura 3.4 Se muestran varias aplicaciones, al igual que las versiones manejadas por comparador, la carga es activada cuando el pin 2 del manejador (cátodo del LED) es llevado a tierra. El resistor Rin debe ser seleccionado para fijar la corriente directa por el LED entre 8 y 50 mA.
(a)
Figura 3.4. Circuitos manejadores de triac activados por lógica (a) carga resistiva; (b) carga inductiva.
3.2.2 Disparo Por Ángulo De Fase
El tiristor es un interruptor. Cuando está apagado, no pasa potencia a la carga. Cuando está encendido, la carga recibe todo el voltaje de la línea eléctrica. Esto es adecuado para operaciones sencillas de encendido o apagado, pero para proveer control proporcional de energía a la carga, se debe ser algo más sofisticado.
En el trabajo presente se analiza un circuito con tiristor para manejar energía proporcional. La técnica que se utiliza para manejar esta energía es el del
[image:34.612.190.423.500.626.2]disparo por ángulo de fase. Este esquema permite alta resolución y aplicaciones de potencia suaves. El tiristor es disparado cada medio ciclo. Mediante el disparo tardío del tiristor en cada ciclo se disminuye la potencia que se puede aplicar a la carga. Si se dispara tempranamente al tiristor cada ciclo, se permite la conducción de corriente por la carga por un ángulo de fase más largo, lo que aumenta la potencia sobre la carga. Es necesario disparar al tiristor en un punto que no sea el cruce por cero para obtener este tipo de control, pero ésto crea RFI (Radio Frecuency Interference). Por otra parte, las versiones más sencillas de circuitos de disparo por ángulo de fase son algo no lineales. La forma de onda resultante para el disparo de un TRIAC, se muestra en la figura 3.5.
Para determinar el valor efectivo de la forma de onda de la figura 4, se debe aplicar la fórmula
v
T e t dt
rms
T
= 1
∫
20 ( )
En términos del ángulo de disparo α, el voltaje rms de la carga se expresaría como
vrms =Vpk + −
π α π α
1 2
1
4sin (2 )
Donde Vpk es el voltaje pico de la línea eléctrica.
La potencia promedio disipada en la carga la podemos determinar de la siguiente ecuación P v R prom rms L = 2
De aquí podemos notar que la potencia que se está consumiendo en la carga depende del ángulo de disparo α. Para ángulos de disparo pequeños, la potencia es pequeña, pero para ángulos de disparo grandes, la potencia entregada a la carga es grande. Otro punto importante que se puede notar es que no se tiene un comportamiento lineal de la potencia con respecto al ángulo de disparo.
3.2.3 Descripción de un Circuito Controlador de Disparo por Ángulo de Fase Mediante un Voltaje Análogo.
La figura 3.6 es el diagrama esquemático del circuito disparador por ángulo de fase cuyo ángulo α es controlado por una entrada de voltaje. Se divide en tres bloques funcionales: circuito detector de cruce por cero, generador de tren de rampas sincronizado y circuito disparador.
La rampa se produce mediante el amplificador operacional OP1, su capacitor de retroalimentación y el potenciómetro de entrada. Debido a la retroalimentación negativa, la entrada inversora del amplificador operacional se mantiene en tierra virtual. Una corriente constante fluye desde la salida del amplificador operacional, a través del capacitor, a través del potenciómetro de 15KΩ y la fuente de -15V. Puesto que la corriente es constante, el capacitor se carga a una razón constante produciendo una rampa. Cada vez que la línea de voltaje cruza por cero, un pulso procedente de C1 o C2 satura al transistor Q1. Esta acción hace que el capacitor se ponga en corto y se descargue rápidamente. De esta forma, cada vez que se tenga un cruce por cero, la rampa cae a cero empezando a incrementarse nuevamente. Esta rampa continúa durante medio ciclo de la línea, es decir, 8.3ms.
El circuito disparador funciona de la siguiente manera. Mientras que la rampa esté por debajo de Vin, la salida del comparador C3 está en +15V por lo que el
triac está apagado. Sin embargo, tan pronto como la rampa sube por arriba de
Vin, la salida de C3 se pone en -15V. Hay un flujo de corriente por el LED del
MOC3010, lo que hace que el LED se encienda y dispare al triac. Si consideramos que el voltaje máximo de la rampa es de 10 V, se pueden resumir algunos puntos en la tabla 1. Si el voltaje Vin es grande, a la rampa le
toma un tiempo a partir del cruce por cero antes de que pueda sobrepasar esta referencia. De esta manera, el pulso de disparo es retrasado, enviando solamente un pequeño voltaje a la carga. Si hay un decremento Vin, se tendrá
una pequeña referencia en el comparador lo que involucra que pasará menos tiempo antes de que la rampa pueda sobrepasar este nivel y disparar el triac. El triac conduce la mayor parte del ciclo, dejando pasar un voltaje más grande a la carga.
Vin Tiempo para
disparar
Porcentaje del ciclo
(V) (ms) Aplicado
10.0 8.2 0%
7.5 6.2 25%
5.0 4.1 50%
2.5 2.1 75%
[image:36.612.212.441.483.672.2]0 0 100%
Figura 3.6. Circuito controlador de disparo por ángulo de fase.
3.3 Sensor LM35
Sensor de Precisión de Temperatura en °C
3.3.1 Descripción General:
La serie LM35 es un sensor de temperatura basados en un dispositivo semiconductor dentro de un circuito integrado, el cual su voltaje de salida es linealmente proporcional a la escala centígrada de temperatura. De esta manera, el LM35 tiene una gran ventaja sobre sensores de temperatura lineales calibrados en grados Kelvin, ya que el usuario no requiere obtener un gran voltaje constante de la salida para obtener la escala centígrada conveniente.
El LM35 no requiere calibración externa o ajuste del voltaje para obtener una exactitud típica de ±¼°C a temperatura ambiente y de ±¾°C al trabajar al máximo en su rango de temperatura de -55 a 150°C. El bajo costo esta asegurado debido al ajuste y calibración en el integrado.
Dada su baja impedancia de salida, la salida lineal y una calibración
Puede ser utilizado con fuentes de polaridad simétrica (positiva y negativa) o con una fuente de poder de una sola polaridad. Como el LM35 toma solo 60mA de la fuente de alimentación, tiene un calentamiento muy bajo, menor a 0.1 °C a temperatura ambiente.
Una de sus principales características es que esta calibrado directamente en grados Centígrados y su factor de escala es lineal ya que por cada grado centígrado nos da 10mV/ºC.
El motivo de que porque escogimos este sensor de todos los demás, es por que el trabaja dentro del rango que deseamos (menor de los 100° C), también por su precisión y respuesta lineal con que trabaja, y un motivo mas por que a lo largo de la carrera trabajamos con el en diversas practicas y ya estamos muy familiarizado.
3.4 Desarrollo
Teniendo como base los aspectos teóricos y prácticos antes visto nos dispusimos a realizar nuestro prototipo en manera general realizamos el siguiente diagrama a bloques.
Referencia: Nuestra referencia es la temperatura propuesta por el usuario (40 a 80 °C).
Error: Es la diferencia entre la lectura del sensor LM35 y el valor propuesto en la referencia por el usuario.
Control: Esta programado dentro del software LabVIEW, en el cual se utiliza un control PID donde se calcularon sus parámetros por el Método de Ziegler y Nichols
Planta: Es un recinto donde se monitorea la temperatura, que se controlara con un foco de 100 Watts y un ventilador de C. D. según la temperatura a la que se encuentra el recinto con respecto a la referencia dada.
Adecuador: La señal eléctrica emitida por el sensor LM35, necesita ser convertida en una forma aceptable al hardware de adquisición de datos
En nuestro trabajo utilizaremos la tarjeta de adquisición (NI USB-6008) de Multifunción por USB de 12 bits a 10 kS/s, ya que fue elegida por su fácil uso práctico para estudiantes ya que con ella podemos sustituir la simulación de mediciones y automatizaciones teóricas para hacerlas practicas y digitales. Se escogió el software de LabVIEW y no otras por que su modo grafico facilita el trabajo en el proyecto asi como el suministro del control al proceso.
En el trabajo presente se usara un circuito con tiristor para manejar energía proporcional y por ultimo la técnica que se utiliza para manejar esta energía es el del disparo por ángulo de fase.
CAPITULO 4. LabVIEW
En este capitulo empezaremos a hablar de nuestro software donde estaremos haciendo la adquisición de datos de nuestra planta, nuestro control (PI), su monitoreo por medio de una computadora y por ultimo se subirá la información por Internet para poder verlo desde cualquier otra computadora.
LabVIEW parte del concepto de programación orientada a objeto (OOP); muchos de los lenguajes OOP son secuénciales, mecanismos que coinciden con el procedimiento usual de llamada a subrutina y retorno. Siendo la concurrencia característica intrínseca de los sistemas de medida en tiempo real, se deberá elegir un lenguaje concurrente (LabVIEW) donde los objetos en tiempo real (Real Time Objects) se comuniquen con otros, mediante mensajes asíncronos. Así los objetos son modelados como maquinas de estados finitos que evolucionan a través de un conjunto de fases, donde en cada momento solo habrá una función operativa.
LabVIEW es una herramienta gráfica de prueba, control y diseño mediante la programación. El lenguaje que usa se llama lenguaje G.
Este programa fue creado por National Instruments (1976) para funcionar sobre máquinas MAC, salió al mercado por primera vez en 1986. Ahora está disponible para las plataformas Windows, UNIX, MAC y Linux y va por la versión 8.20 y 8.21 con soporte para Windows Vista.
Los programas hechos con LabVIEW se llaman VI (Virtual Instrument), lo que da una idea de su uso en origen: el control de instrumentos. Entre sus objetivos están el reducir el tiempo de desarrollo de aplicaciones de todo tipo (no sólo en ámbitos de Test, Control y Diseño) y el permitir la entrada a la informática a programadores no expertos. Esto no significa que la empresa haga únicamente software, sino que busca combinar este software con todo tipo de hardware, tanto tarjetas - propias de adquisición de datos, PAC, Visión, y otro Hardware- como de otras empresas.
Principales usos:
• Es usado principalmente por ingenieros y científicos para tareas como:
• Adquisición de datos
• Control de instrumentos
• Automatización industrial o PAC (Controlador de Automatización Programable)
• Diseño de control: prototipo rápido y hardware
• Diseño Embedded
hacer con lenguajes tradicionales. También es muy rápido hacer programas con LabVIEW y cualquier programador, por experimentado que sea, puede beneficiarse de él. Para los amantes de lo complejo, con LabVIEW pueden crearse programas de miles de VI´s (equivalente a millones de páginas de código texto) para aplicaciones complejas, programas de automatizaciones de decenas de miles de puntos de entradas/salidas, etc. Incluso existen buenas prácticas de programación para optimizar el rendimiento y la calidad de la programación.
Presenta facilidades para el manejo de:
Interfaces de comunicaciones:
• Puerto serie
• Puerto paralelo
• GPIB
• PXI
• VXI
• TCP/IP, UDP, DataSocket
• Irda
• Bluetooth
• USB
• OPC...
• Capacidad de interactuar con otros lenguajes y aplicaciones:
• DLL: librerías de funciones
• .NET
• ActiveX
• MultiSim
• Matlab/Simulink
• AutoCAD, SolidWorks, etc
• Herramientas gráficas y textuales para el procesado digital de señales.
• Visualización y manejo de gráficas con datos dinámicos.
• Adquisición y tratamiento de imágenes.
• Control de movimiento (combinado incluso con todo lo anterior).
• Tiempo Real estrictamente hablando.
• Programación de FPGAs para control o validación.
• Sincronización entre dispositivos.
4.1 Programa LabVIEW.
Es una herramienta gráfica de programación, esto significa que los programas no se escriben, sino que se grafican, facilitando su comprensión.
Un programa se divide en Panel Frontal y Diagrama de bloques. El Panel
La Figura 4.1 muestra un Diagrama de Bloques de un programa en el que se genera un arreglo de 100 elementos aleatorios, a continuación se hace la FFT de este arreglo y se muestra en una gráfica:
Figura 4.1
4.2 La Instrumentación Virtual.
Un instrumento virtual es un modulo de software que simula el panel frontal apoyándose en elementos hardware accesibles por el computador (tarjetas de adquisición, instrumentos accesibles vía GPIB, VXI, RS-232, USB, Ethernet), realiza una serie de medidas como si se tratase de un instrumento real.
Cuando se ejecuta un programa que funciona como instrumento virtual o VI, el usuario ve en la pantalla de su computadora un panel cuya función es idéntica a la de un instrumentó físico, facilitando la visualización y el control del aparato. A partir de los datos reflejados en el panel frontal, el VI debe actuar recogiendo o generando señales, como lo haría su homologo físico.
El control de instrumentación por computadora no resulta nuevo; incluso el uso de la computadoraen sistemas de medida se usaba en los setenta mediante la interface de bus IEEE 488 o GPIB (General Purpose Interface Bus). Pero ha sido en los noventa cuando los procesadores de 16 y 32 bits se han incorporado a equipos accesibles, consiguiendo altas velocidades y grandes capacidades de memoria. Esta popularización de computadoras de altas prestaciones ha traído consigo un fuerte desarrollo de potentes software que simplifican la creación de aplicaciones.
4.3 Internet con LabVIEW.
La gran mayoría de las aplicaciones actuales recoge, analiza, procesa y visualiza los datos en una misma maquina, esta ideología actualmente ya esta cambiando, ahora la adquisición de datos ya no se realiza únicamente en el PC, sino que existen sensores inteligentes que recoge información y se conectan directamente a la red Ethernet convirtiéndose en un punto de medida remoto el cual vamos a conectar y a importar esos datos a nuestra aplicación.
Las ventajas de montar aplicaciones distribuidas es el hecho de poder aprovechar las diferentes características de diferentes maquinas o plataformas de manera que podamos procesar información en una maquina mas poderosa y quizás visualizar resultados en otras cuyas características sean mas limitadas. Es ya un hecho que en un alto porcentaje de empresas la red Ethernet es una herramienta común entre muchas otras, así que tenemos que utilizarla igual que se utiliza para otros quehaceres.
4.3.1 Protocolo TCP-IP
En el mundo de las telecomunicaciones cada vez es más importante comunicarnos (transmitir datos) a sistemas, independientemente de su localización. Los protocolos son una serie de normas que definirán como se debe realizar la transmisión y recepción de información.
Con el protocolo TCP-IP (Transmission Control Protocol) podemos interconectarnos con equipos que se encuentran fuera de nuestra red local. Es decir, podemos conectarnos con cualquier equipo que también este conectado a Internet y que tenga una dirección IP. Una vez estemos conectados con ese equipo, podremos transmitir todo tipo de información (correo electrónico, documentos, daos de cualquier instrumento de medida, etc.).
4.3.2 Dirección IP
La dirección IP es la dirección de nuestro equipo dentro de Internet. Algo similar seria la dirección de nuestro domicilio; gracias a ella nos puede llegar una carta desde cualquier parte del mundo a nuestro buzón sin ninguna confusión, ya que no existen dos iguales en todo el mundo. La dirección IP es lo mismo pero en Internet, donde la dirección IP identifica nuestro equipo (el buzón de nuestra casa) dentro de toda la red (el mundo).
En la práctica, la notificación utilizada tiene una estructura como la mostrada a continuación: 147.83.4.32, donde los dos primeros bytes definen el dominio (red o subred) y los dos últimos definen el terminal.
4.3.3 Protocolo UDP.
El protocolo UDP (User Datagram Protocol) al contrario que el TCP-IP esta mas enfocado a trabajar con redes de ámbito local, su filosofía de trabajo es similar al de TCP-IP, pero con la diferencia de que UDP no esta orientado a conexión, la información se envía a la red y es o son los computadores destino los que se preocupan de recoger la información. La forma que tiene de diferenciar los distintos tipos de información a enviar por el servidor es a través de los diferentes puertos. Por tanto, utilizaremos los puertos para diferenciar el tipo de información a transmitir y al sistema de este destinado.
El protocolo UDP nos permite enviar datos a la red dirigidos a un único receptor a varios receptores. Cuando la información se envía a un solo receptor especificamos su dirección IP que va a ser única y que diferencia a este cliente de los demás. Cuando deseamos que la información sea recogida por varios receptores podemos utilizar direcciones IP del tipo multicast en el rango de 244.0.0.0 a 239.255.255.255.
4.4 DataSocket
Las librerías de DataSocket nos van a ahorrar programación en el momento de publicar y compartir los datos que generan nuestra aplicación en LabVIEW a través de la red.
Mediante el DataSocketnos vamos a ahorrar todos los pasos que tenemos que realizar cuando implementamos una comunicación basada directamente sobre TCP/IP que son:
• Configuración el servidor al escuchar de una petición de conexión por el puerto elegido.
• Programación de la conversión necesaria de los datos para poder enviarla a través de la red.
• Programar todo el manejo de errores que se pueden dar en la comunicación.
• Configuración del cliente para realizar la conexión el PC servidor por el puerto indicado.
• Programar la conversión de los datos que nos llegan a través de la red en el cliente con la complicación de lo que ello a veces supone.
Mediante DataSocket los pasos a seguir para establecer una comunicación serán:
• En el servidor, abrir una conexión DataSocket utilizando un nombre que identifica los datos a transmitir.
• Escribir los datos en la conexión DataSocket cada vez que los datos se actualicen.
• En el cliente, únicamente es necesario conocer el nombre del PC (dirección TCP/IP) donde se publican los datos y realizar la lectura de los datos de interés.
El manejo del protocolo lo realiza la aplicación DataSocket SERVER que es la que se va a encargar de servir los datos que nosotros queramos publicar.
Los elementos que intervienen en una comunicación de este tipo son:
• El que publica: aplicación donde se genera los datos a compartir.
• El que suscribe: aplicación que importa los datos desde otra aplicación.
• DataSocket SERVER: aplicación que sirve los datos que son publicados para las aplicaciones que quieren acceder a ellos.