12º CONGRESO IBEROAMERICANO DE INGENIERÍA MECÁNICA
Guayaquil, 10 a 13 de Noviembre de 2015
DISEÑO, CONSTRUCCIÓN Y VALIDACIÓN DE UNA ECU PARA UN MOTOR DE
COMBUSTIÓN INTERNA A GASOLINA
Echeverry Mejía J M*, Contreras Domínguez D E*, Vásquez López V*, López Hidalgo M Aº
*Tecnológico de Monterrey - Campus Estado de México, Atizapán–Estado de México, º Universidad del Azuay, Cuenca - Ecuador
e-mail:*[email protected],[email protected],[email protected], °[email protected] Palabras claves: Autotrónica, ECU, Inyección Electrónica, Ignición, CAN
Área temática: DISEÑO Y CONCEPCIÓN DE MÁQUINAS Y COMPONENTES - Vehículos automóvil
RESUMEN
El presente documento presenta el diseño, construcción y validación de una ECU para el control de un motor de combustión interna a gasolina. Se presenta el desarrollo e implementación de los algoritmos de ignición e inyección electrónica en un microcontrolador Freescale núcleo Power PC de grado automotriz, se instrumentaron las variables físicas de: posición de cigüeñal, presión en el múltiple de admisión, temperatura en el múltiple de admisión, temperatura del anticongelante, posición de la válvula mariposa, necesarias para el cálculo de los algoritmos.
El desarrollo experimental se desarrolla sobre un motor 1.6L de 4 cilindros a gasolina, de inyección indirecta marca Chevrolet. Se hicieron validaciones en un rango lineal del motor con carga constante.
A su vez se desarrolló una interface de comunicación sobre el protocolo de comunicaciones CAN, de uso automotriz, que permite el análisis de todos los parámetros en tiempo real.
INTRODUCCIÓN
El artículo presenta el diseño y construcción de una ECU para un motor a gasolina, así como la validación de su desempeño por medio de la comparación contra la computadora de fábrica. El motor empleado para el desarrollo experimental es marca Chevrolet de 1.6 litros, inyección indirecta multipunto, que comercialmente son instalados en los vehículos Chevy y Corsa de la misma marca.
La función principal de la ECU es controlar el tiempo de adelanto de la chispa (ignición) y la cantidad de combustible que se inyecta (inyección). Los algoritmos de ignición e inyección están sincronizados en función de la velocidad angular del motor y de la posición de los pistones por medio del sensor de posición del cigüeñal (CKP), de forma tal que, para estos algoritmos es necesario conocer en qué tiempo se encuentra el motor (Admisión, Compresión, Explosión, Escape).
El algoritmo de ignición es el encargado de calcular adelanto de la chispa y que corresponde al ángulo que tiene la biela antes de llegar al punto superior (TDC), este adelanto debe producirse debido a la velocidad con la que la explosión se propaga dentro de la cámara de combustión y depende de la dinámica misma del motor. El algoritmo de inyección se encarga de calcular la cantidad de masa que debe inyectarse de gasolina y que corresponde al tiempo que el inyector debe permanecer abierto, para motores de inyección indirecta, como es el caso del motor de prueba, se realiza antes de que la válvula de admisión se abra para asegurar la correcta operación del motor.
En la Figura 1 se muestra la temporización de las señales de ignición e inyección. Cabe resaltar que únicamente se tienen dos señales de ignición, debido a que el motor de prueba cuenta con dos bobinas para generar la chispa en las cuatro bujías, de ésta forma se pierde una chispa en cada escape donde no afecta al correcto funcionamiento del motor [1].
Figura 1: Temporización de las señales de ignición e inyección.
Para el desarrollo de la ECU y sus algoritmos se necesitan cuatro módulos: instrumentación, procesamiento, potencia y actuadores. En la Figura 2b se presenta un esquema de la interacción de ellos. El primero de estos módulos, el de instrumentación, se compone de las señales de los sensores de posición del cigüeñal (CKP), presión en el múltiple de admisión (MAP), temperatura en el múltiple de admisión (MAT), posición de la válvula mariposa (TPS) y temperatura del anticongelante (CLT). A continuación se presenta brevemente su relevancia: MAP y MAT: señales análogas, con sus mediciones se aproxima la carga del motor y la masa de aire que
entra al múltiple de admisión, factores que impactan los algoritmos de ignición e inyección respectivamente. TPS: señal análoga, su importancia radica en el control de la relación de aire/combustible. Por esta razón,
este sensor impacta en el algoritmo de inyección junto con los sensores MAP y MAT.
Figura 2: a) Señal y acondicionamiento del CKP, b) Esquema de los sistemas de la ECU [2]
CKP: señal digital, es el más importante para la correcta implementación de los algoritmos de ignición e inyección, ya que este determina el TDC de un cilindro y las RPM del motor. Dada su gran importancia, se presenta en la Figura 2a la forma de onda que entrega el sensor CKP (1) así como su acondicionamiento por medio de circuito de cruce por cero (2), para hacer su interface con el microcontrolador.
Para el análisis de los parámetros en tiempo real, se utiliza un protocolo de comunicación serial desarrollado por Bosch en 1985 llamado CAN. Cuyas principales ventajas son su alto nivel de seguridad y eficiente distribución de información en tiempo real [3]. Las computadoras automotrices actuales utilizan el bus CAN para comunicarse entre ellas, por ejemplo la computadora de motor informa a través de este bus al panel de instrumentos las revoluciones por minuto del motor (RPM) para ser mostradas en el tacómetro. Es así que por medio de CAN se reporta la información de los parámetros de control y sensores instrumentados tal como lo haría la computadora de motor del fabricante. Para finalmente decodificar dicha información con una interface desarrollada en LabView.
Para el segundo módulo, el de procesamiento, dadas las características técnicas de entradas, salidas y tipo de procesamiento, se selecciona el microcontrolador MPC5634M de la marca Freescale® [4], al ser este mismo, de grado automotriz y contar con las siguientes características:
Reloj de 80MHz. Permitiéndole realizar un cálculo cada 12.5ns, lo cual es considerablemente más rápido que la dinámica de las variables a medir y controlar.
Memoria flash de 1536kB. Razón por la cual se debe estructurar y optimizar el código.
16 puertos de entradas/salidas multipropósito (eMIOS). Canales de timer que trabajen en modos de operación input capture para las entradas (CKP) y output compare para las salidas (2 bobinas, 4 inyectores).
Múltiples entradas analógicas para la adquisición de las señales MAP, MAT, CLT, TPS. Soporte para comunicación serial CAN de alta velocidad.
5 timers independientes para interrupciones periódicas (PITs). Utilizados para sincronizar los parámetros de escritura y lectura.
En el tercer módulo, el de potencia es empleado para acoplar las señales digitales generadas por el microcontrolador con las características eléctricas de los actuadores. Por esta razón se utiliza el kit de desarrollo KIT33810EKEVME Freescale® [5] el cual es una interface de potencia para motores de 4 cilindros de gasolina o diésel, esta tarjeta cuenta con IGBTs para actuar las bobinas de ignición y MOSFETs para actuar los inyectores.
METODOLOGÍA
La metodología de la presente investigación consiste en el diseño e implementación de tres algoritmos necesarios para el control de un motor de combustión interna y que están contenidos en la ECU: algoritmo de control principal (máquina de estados), algoritmo de timing o sincronización, y algoritmos de ignición e inyección.
1
Algoritmo de control principal
Como se muestra en la Figura 3a, en primera instancia se inicializa el microcontrolador. Es decir, se configura el reloj y los puertos del microcontrolador según se desea utilizarlos, además se fija el valor de las variables a sus condiciones iniciales. Posteriormente se espera la interrupción generada por los pulsos del sensor CKP conectado a la entrada input capture en un canal del Timer, si este tiempo de espera es mayor a un tiempo predeterminado en el reloj de tiempo real (RTC), las variables se resetean a su valor inicial, de esta forma cuando el motor se apague la computadora ECU reinicie sus parámetros de operación para estar lista para una nuevo encendido. Durante el tiempo que se encuentre en espera también se realiza la transmisión de información por medio de CAN.
Figura 3: Máquina de Estados ECU (a) y Lógica de Sincronización (b)
Los otros dos estados posibles son timing o sincronización y cálculo de tiempos de ignición e inyección. Timing es un estado en el que se ubica la posición del TDC para así poder sincronizar correctamente las señales de salida output compare en función de la velocidad angular, necesario para cada arranque del motor. Y finalmente el cálculo de tiempos de ignición e inyección es, como su nombre lo indica, el estado que contiene la lógica de operación continua.
Algoritmo de sincronización
Cada revolución del cigüeñal contiene un número de interrupciones constante, debido a que el sensor contiene un disco dentado, a su vez este disco posee un diente de menos que marca la referencia con el TDC. Al encontrar una interrupción el microcontrolador y estar dentro de las primeras tres revoluciones, el algoritmo sigue la lógica mostrada en la Figura 3b. El objetivo principal de este algoritmo es encontrar el periodo más grande dentro de un arreglo que almacena los periodos de cada revolución, con el fin de sincronizar el algoritmo de ignición e inyección al estado actual del motor.
Algoritmo de Ignición e Inyección
En el algoritmo de ignición las señales de salida están en función de la velocidad angular del motor y de la posición del TDC. Para el caso de la ignición se tienen tres tiempos: tiempo de espera, tiempo de carga y tiempo de avance, los cuales se ilustran en la Figura 4a.
El tiempo de avance es el tiempo de antelación con el que se tiene que encender la chispa para que funcione apropiadamente el motor y se obtenga el mejor desempeño posible. En el tiempo de carga la bobina almacena la energía suficiente para que la chispa tenga la capacidad energética necesaria para inflamar el combustible. El tiempo de espera es el tiempo restante para cumplir con el tiempo de una revolución.
De forma similar al algoritmo anterior, el algoritmo de inyección se compone de tres tiempos (Figura 4b): el tiempo de espera, el tiempo de inyección y el tiempo de avance de la inyección. El primero es igual al tiempo de espera utilizado en el algoritmo de ignición. El tiempo de inyección es el tiempo que debe mantener el inyector
(a)
abierto para lograr depositar en el múltiple de admisión la masa adecuada de combustible, logrando con esto mantener la relación aire/combustible deseada. El tiempo de avance de inyección corresponde al tiempo en que la válvula de admisión se abre antes del TDC [6].
Figura 4: Tiempos de ignición (a) e inyección (b).
El objetivo del algoritmo de ignición e inyección es realizar las operaciones matemáticas para calcular los tiempos de espera, que son necesarios para las salidas output compare en los canales eMIOS del Timer, y posteriormente, este tren de pulsos, debe ser enviado al sistema de potencia. Para el cálculo de estos tiempos se sigue la lógica que se muestra en la Figura 5.
Figura 5: Diagrama de cálculo de tiempos de inyección e ignición.
Cabe resaltar que dentro del programa se consideran limitantes físicas del proceso y del microcontrolador. Por ejemplo los tiempos de espera de inyección más tiempo de inyección más tiempo avance de inyección, o los tiempos de espera de ignición más carga más avance de la chispa, no deben superar el tiempo de una revolución. Así mismo se tiene que considerar el eventual desbordamiento de los registros para el funcionamiento continuo de los algoritmos.
Para el cálculo de los tiempos de inyección, carga de la bobina y avance de la chipa existen múltiples técnicas, la más usada es la implementación de mapas cartográficos en todo su rango de operación. En particular, para esta versión de la ECU, solo se caracterizó el rango sin carga, que corresponde a un pequeño segmento del mapa. En la Figura 6 se presenta dicha caracterización.
Figura 6: Caracterización de tiempos de ignición e inyección para motor de pruebas.
EXPERIMENTACIÓN Y RESULTADOS
En la Figura 7 se presenta una prueba preliminar que corrobora el correcto funcionamiento de las señales digitales, la señal 1 es CKP, la señal 2 es ignición para cilindros 2 y 3, la señal 3 es ignición para cilindros 1 y 4 y la señal 4 es inyección del cilindro 2.
Figura 7: Señales de salida generadas por el microcontrolador.
Para la validación de la ECU se llevaron a cabo tres experimentos, dichos experimentos fueron desarrollados usando la computadora de fabricante y el diseño propuesto en el presente artículo, con el objetivo de comparar el desempeño. En el primero se compara el consumo de combustible en ralentí, en el segundo se contrasta las velocidades angulares de ralentí y en el tercero se analiza el comportamiento generado bajo aceleración.
La prueba de consumo de combustible en ralentí se realiza cuantificando la masa en kilogramos consumida por el motor, esta masa fue medida con una báscula de precisión durante un rango de tiempo. El motor se calentó previamente para observar la dinámica estable del mismo, con esto se evita el estado transitorio de arranque en frío en el cual se consume mayor cantidad de gasolina. Los resultados se muestran en la Figura 8.
Velocidad angular del motor (rev/min)
tie
m
p
o
(
ms
Figura 8: Consumo de combustible de ECU diseñada y del fabricante.
Se realiza un análisis de Correlación de Pearson para determinar la correlación lineal entre ambas respuestas. Para el caso particular del experimento de consumo de combustible se obtuvo un resultado de 0.9823, teniendo así una alta correlación positiva. Cabe resaltar que la duración del experimento es menor a 2 minutos, ya que el comportamiento del motor cambia al encenderse el ventilador de refrigeración, al ser este una carga adicional para el mismo.
El segundo experimento es la comparación de las velocidades angulares del motor en Ralentí con ambas ECU. Los resultados se muestran en la Figura 9. El desempeño del motor se evalúa por medio de una prueba t para medias de dos muestras emparejadas bajo la hipótesis nula de medias iguales. Se selecciona esta prueba ya que para la misma planta (motor) se validan dos diferentes controladores (ECU) impidiendo que el muestreo sea aleatorio. En esta prueba se demuestra que estadísticamente no hay diferencia significativa entre las medias (véase la Tabla 1).
Figura 9: Comparación de velocidad angular del motor en ralentí de ECU diseñada y del fabricante.
Tabla 1.Prueba t para medias de dos muestras emparejadas.
Diseño Fabricante
Media 954.486 956.056
Varianza 277.715 130.993
Diferencia hipotética de las medias 0 P(T<=t) dos colas 0.22992
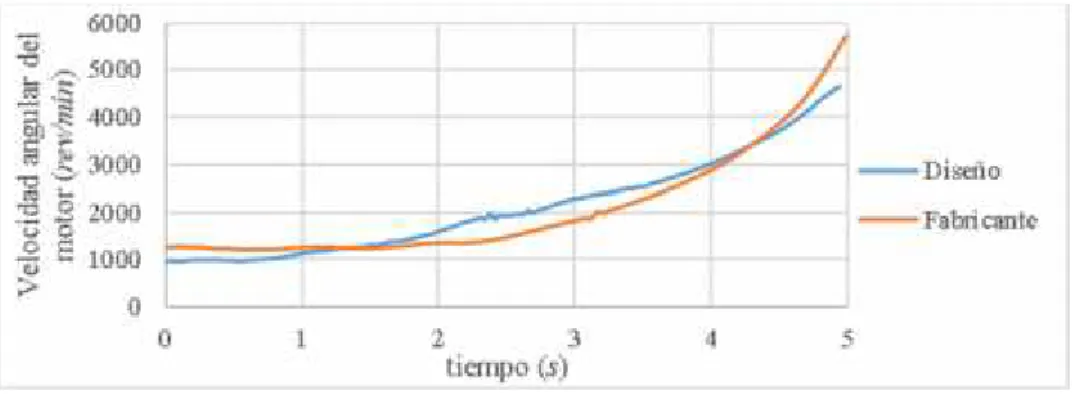
combustible se realiza un análisis de Correlación de Pearson, el cual da un valor de 0.9776, cercano a una correlación total positiva.
Figura 10: Comparación de velocidad angular del motor bajo aceleración de ECU diseñada y del fabricante.
CONCLUSIONES
Se realizaron tres pruebas experimentales para corroborar la similitud en comportamiento de la ECU diseñada y la del fabricante. En ellas se observa un consumo similar de combustible en ralentí, comprobable al tener una alta correlación positiva de Pearson. Igualmente, se corrobora la validez del diseño propuesto al tener velocidades angulares en ralentí con medias estadísticamente iguales y tener velocidades angulares bajo aceleración con una alta correlación positiva. Las pequeñas diferencias encontradas pueden explicarse dada la naturaleza no lineal del motor de combustión interna.
Finalmente, el diseño propuesto y la metodología implementada, conforman el desarrollo de una plataforma que permite la modificación en tiempo real de parámetros y algoritmos de control para un motor de combustión interna a gasolina, de forma tal que permita realizar investigaciones futuras buscando optimizar el comportamiento del mismo.
TRABAJO FUTURO
Se plantea desarrollar la ECU para todos los rangos de carga del motor y su posterior validación en un dinamómetro de motor. De igual forma, se tiene contemplado diseñar estrategias de control en lazo cerrado para ralentí, y la contribución del sensor lambda y knocking en los algoritmos de ignición e inyección.
Finalmente, se desea construir y optimizar los mapas cartográficos del motor de prueba para su desempeño en la ciudad de México, generando así una metodología que permita reproducir en una forma simple y rápida los mapas cartográficos para cualquier otra ubicación geográfica.
AGRADECIMIENTOS
REFERENCIAS
1. D. Koscielnik, Algorithms of real-time correction of the fuel map and the ignition map of a race combustion engine with spark ignition, IEEE International Symposium on Industrial Electronics, pp. 62-67, 2010. 2. Echeverry M., Julian, Calle V., Oscar, Murillo S., Carlos. Sistemas de Encendido Electrónico para Motores
de Combustión Interna de Cuatro Tiempos a Gasolina con Encendido Original Conmutado por Platinos. Manizales-Colombia: IEEE II Simposio Regional de Electrónica y Aplicaciones Industriales, 2006.
3. ISO/IEC, 11898: Road vehicles -- Controller area network (CAN). International Organization for Standardization, Geneva, Switzerland. 2014-07-30.
4. Freescale Semiconductor, MPC5634M Microcontroller Reference Manual, Freescale Semiconductor. Rept. MPC5634MRM, Tempe, Arizona. May, 2010.
5. Freescale Semiconductor, KIT33810EKEVME Evaluation Board User’s Guide, Freescale Semiconductor. Rept. KT33810UG, Tempe, Arizona. May, 2010. 1.
6. G. Zhu, I. Haskara y J. Winkelman, Closed-Loop Ignition Timing Control for SI Engines Using Ionization Current Feedback, IEEE Transactions on Control Systems Technology, vol. 15, pp. 416-427, 2007.
UNIDADES Y NOMENCLATURA
CAN Controller Area Network CKP Sensor de Posición del Cigüeñal
CLT Sensor de temperatura del anticongelante ECU Unidad de Control Electrónica
eMIOS Subsistema Modular de Entradas/Salidas mejorado kB kilobyte
kg kilogramos
MAP Sensor de Presión en el Múltiple de Admisión MAT Sensor de Temperatura en el Múltiple de Admisión MHz MegaHertz
ms milisegundos ns nanosegundos
PITs Timers de Interrupción Periódica
RPM Velocidad Angular del Motor en Revoluciones Por Minuto rev/min Revoluciones por minuto
RTC Reloj de Tiempo Real s segundos
TDC Punto Muerto Superior del motor

![Figura 2: a) Señal y acondicionamiento del CKP, b) Esquema de los sistemas de la ECU [2]](https://thumb-us.123doks.com/thumbv2/123dok_es/6680293.249023/3.892.136.808.181.407/figura-señal-acondicionamiento-ckp-b-esquema-sistemas-ecu.webp)