INSTITUTO POLITÉCNICO NACIONAL
QUE PARA OBTENER EL TÍTULO DE:
INGENIERO ELECTRICISTA
PRESENTA:
ANTONIO VALENZUELA GARCÍA
MÉXICO, D. F. 2013
DETERMINACIÓN DE LA CORRIENTE DE
CORTOCIRCUITO DE MOTORES DE C.D. CON
EXCITACIÓN INDEPENDIENTE
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
DIRECTORES DE TESIS:
DR. DANIEL RUIZ VEGA
Determinación de la Corriente de Cortocircuito de Motores de C.D. con Excitación Independiente
D
EDICATORIA
A mi madre:
Por ser mi fuente inspiradora de trabajo y dedicación, la promotora de todas mis victorias, ya que en ti he encontrado siempre la motivación para alcanzar el éxito y el coraje para mirar hacia adelante, por los consejos que me has brindado cuando más los necesito, y sobre todo porque toda la vida me has demostrado tu soporte y cariño incondicional. Mil gracias mamá.
A mi padre:
Por su apoyo y motivación durante mi vida profesional, por brindarme consejos que me ayudaron a desarrollarme de manera social y humanística. Muchas gracias papá por tu cariño y por las palabras alentadoras que me dedicabas cada vez que yo regresaba a la Ciudad de México, las cuales me sirvieron de empuje para desempeñarme eficientemente en mis estudios.
A mis familiares:
Por estar siempre conmigo, apoyándome en todo momento. Agradezco a mis hermanos, a mis tías, a mi abuela, y a mis dos abuelos, de los cuales uno me cuidaba desde el cielo mientras yo estaba lejos de casa. Gracias por su apoyo.
A mis amigos:
Determinación de la Corriente de Cortocircuito de Motores de C.D. con Excitación Independiente
A
GRADECIMIENTOS
A la máxima casa de estudios de ingeniería en México, el Instituto Politécnico
Nacional, y a la Escuela Superior de Ingeniería Mecaniza y Eléctrica, unidad
Zacatenco, por el énfasis dado hacia la práctica de los conocimientos teóricos adquiridos en mi carrera, los cuales siempre estuvieron enfocados al campo laboral real.
A mis profesores:
Que durante todo mi trayecto estudiantil me brindaron parte importante de su experiencia profesional y conocimientos que me ayudaran para trabajos posteriores.
Especialmente al Dr. Daniel Ruiz Vega:
Por haber aceptado ser mi director durante este trabajo, por su disponibilidad, observaciones y recomendaciones que ayudaron para que la tesis tuviera una excelente calidad de contenido. Por darme la confianza de operar los motores del laboratorio y también por complementar mis conocimientos de cada vez que alguna duda se me aparecía.
Al M. en C. Tomás Ignacio Asiaín Olivares:
Determinación de la Corriente de Cortocircuito de Motores de C.D. con Excitación Independiente
R
ESUMEN
El cálculo de la corriente de cortocircuito de los motores de C.D. es esencial cuando se requiere conocer la corriente de falla total en algún punto de las instalaciones auxiliares de C.D. para la coordinación de protecciones, considerando que este tipo de instalaciones son muy comunes en las centrales generadoras de energía eléctrica y en las subestaciones. Del buen funcionamiento de los elementos de protección de la instalación auxiliar depende que se tenga un suministro confiable de energía eléctrica en caso de existir una falla en la instalación de C.A.
En el presente trabajo se calcula y analiza la corriente de cortocircuito que produce un motor de C.D. de 1 HP (con una corriente de armadura nominal de 4 A), en base a la norma IEC [IEC, 1997], con la cual también se determinan los parámetros de la función de aproximación estándar, necesaria para analizar la corriente de falla en función del tiempo.
Se presenta la teoría básica de los motores de C.D., analizando su estructura y funcionamiento. Se muestra también el modelo dinámico del motor y las ecuaciones de estado que lo describen. Posteriormente se describe el comportamiento del motor en cortocircuito y la metodología del cálculo.
Los parámetros del motor, necesarios para el cálculo, se obtuvieron con ayuda del Simulador Experimental de Sistemas Eléctricos de Potencia que está siendo desarrollado por el Grupo de Investigación de Fenómenos Dinámicos en Redes Interconectadas y Máquinas Eléctricas de la SEPI-ESIME-Zacatenco.
Determinación de la Corriente de Cortocircuito de Motores de C.D. con Excitación Independiente
C
ONTENIDO
Página
DEDICATORIA ... V AGRADECIMIENTOS ... VII RESUMEN ... IX CONTENIDO ... XI LISTA DE FIGURAS ... XIII LISTA DE TABLAS ... XV GLOSARIO DE TÉRMINOS ... XVII NOMENCLATURA ... XIX
CAPÍTULO 1: INTRODUCCIÓN ... 1
1.1PLANTEAMIENTODELPROBLEMA ... 1
1.2ANTECEDENTES ... 1
1.3OBJETIVO ... 3
1.4JUSTIFICACIÓN ... 3
1.5LIMITACIONES ... 4
1.6CONTENIDODELATESIS ... 5
CAPÍTULO 2: MOTOR DE CORRIENTE DIRECTA CON EXCITACIÓN INDEPENDIENTE ... 7
2.1INTRODUCCIÓN ... 7
2.1.1 Clasificación ... 7
2.2ESTRUCTURA ... 8
2.3PRINCIPIODEFUNCIONAMIENTO ... 11
2.3.1 Introducción ... 11
2.3.2 Aspectos generales de funcionamiento del motor de C.D. ... 17
2.3.3 Características de funcionamiento de los motores de C.D. ... 19
2.4MODELODINÁMICODELMOTORDEC.D. ... 21
2.4.1 Introducción ... 21
2.4.2 Análisis Dinámico ... 23
2.5PRUEBASNORMALIZADASPARALADETERMINACIÓNDEPARAMETROSDELMODELO .... 26
2.5.1 Introducción ... 26
2.5.2 Medición de la resistencia de los devanados ... 27
2.5.3 Resistencia del devanado de la armadura ... 27
2.5.4 Medición de la inductancia de los devanados ... 29
2.5.5 Determinación de la inductancia saturada ... 29
2.5.6 Medición del momento de inercia ... 30
CAPÍTULO 3: CORRIENTE DE CORTOCIRCUITO DEL MOTOR DE C.D. DE EXCITACIÓN INDEPENDIENTE ... 33
3.1INTRODUCCIÓN ... 33
3.2ANÁLISISDELAOPERACIÓNDELMOTORDEC.D.ENCORTOCIRCUITO ... 35
3.2.1 Función de aproximación estándar ... 35
3.2.2 Comportamiento del motor de C.D. en condiciones de falla ... 36
3.2.3 Corriente de cortocircuito para velocidad constante y corriente de excitación decreciente ... 38
3.2.4 Corriente de cortocircuito para velocidad decreciente y corriente de excitación constante ... 39
3.3DETERMINACIÓNDELACORRIENTEDEFALLAENMOTORESDEC.D.DEEXCITACIÓN INDEPENDIENTEDEACUERDOALANORMAIEC-61660-1-1997 ... 41
Página
3.3.2 Corriente parcial y pico de cortocircuito ... 42
3.4DETERMINACIÓNDELACORRIENTEDEFALLAENMOTORESDEC.D.DEACUERDOALA NORMAIEEE-STD-666-2007 ... 50
3.4.1 Introducción ... 50
3.4.2 Calculo de corriente de cortocircuito en motores de C.D. ... 50
CAPÍTULO 4: PRUEBAS EXPERIMENTALES Y CÁLCULO DE CORTOCIRCUITO ... 53
4.1INTRODUCCIÓN ... 53
4.2DETERMINACIÓNDELOSPARAMETROSDELMODELO ... 53
4.2.1 Introducción ... 53
4.2.2 Resistencia de armadura ... 54
4.2.3 Inductancia de armadura ... 56
4.2.4 Resistencia de campo ... 57
4.2.5 Inductancia de campo ... 58
4.2.6 Momento polar de inercia ... 59
4.2.7 Resultados finales ... 61
4.3 VALIDACIÓNDELOSPARAMETROSDELMODELO ... 62
4.3.1 Introducción ... 62
4.3.2 Sistema de prueba ... 62
4.3.3 Mediciones ... 63
4.3.4 Validación de los parámetros del modelo ... 65
4.3.5 Discusión de resultados ... 68
4.4 CÁLCULO DE LA CORRIENTE DE CORTOCIRCUITO DEL MOTOR DE C.D. ... 69
4.4.1 Introducción ... 69
CAPÍTULO 5: CONCLUSIONES ... 73
5.1CONCLUSIONES ... 73
5.2APORTACIONESDELATESIS ... 74
5.3RECOMENDACIONESPARATRABAJOSFUTUROS ... 74
Determinación de la Corriente de Cortocircuito de Motores de C.D. con Excitación Independiente
L
ISTA DE
F
IGURAS
Página
FIG.2.1.ASPECTOS CONSTRUCTIVOS DE UNA MÁQUINA DE C.D.(ADAPTADA DE [FRAILE,2008]). ... 9
FIG.2.2.DEVANADOS IMBRICADO Y ONDULADO (ADAPTADA DE [FRAILE,2008]). ... 10
FIG.2.3.SECCIÓN DE UN CONDUCTOR DE DELGAS (ADAPTADA DE [FRAILE,2008]). ... 10
FIG.2.4.ESCOBILLA, PORTAESCOBILLA Y MUELLE DE AJUSTE DE LA PRESIÓN DEL CONTACTO (ADAPTADA DE [FRAILE,2008]). ... 11
FIG.2.5.VISTA SEGMENTADA DE UN MOTOR DE C.D. DE 4 POLOS.LOS DEVANADOS DE ARMADURA ESTÁN CONECTADOS EN EL FINAL DEL LADO DERECHO HACIA LOS SEGMENTOS DEL CONMUTADOR.HAY CUATRO JUEGOS DE ESCOBILLAS.LAS BOBINAS SECCIONADAS QUE RODEAN DOS DE LOS CUATRO POLOS SE PUEDEN VER HACIA EL LADO IZQUIERDO DE LOS DEVANADOS FINALES DE LA ARMADURA (ADAPTADA DE [HUGHES, 2006]). ... 11
FIG.2.6.MÁQUINA DE C.D. CON INDUCIDO EN ANILLO (ADAPTADA DE [FRAILE,2008]). ... 12
FIG.2.7.MÁQUINA DE C.D. FUNCIONANDO COMO GENERADOR (ADAPTADA DE [FRAILE,2008]). ... 15
FIG.2.8.MÁQUINA DE C.D. FUNCIONANDO COMO MOTOR (ADAPTADA DE [FRAILE,2008]). ... 16
FIG.2.9.CURVA PAR-VELOCIDAD EN ESTADO ESTACIONARIO (ADAPTADA DE [HUGHES,2006]). ... 16
FIG.2.10.FUNCIONAMIENTO DE LA MÁQUINA DE C.D. COMO MOTOR Y COMO GENERADOR (ADAPTADA DE [FRAILE,2008]). ... 17
FIG.2.11.REÓSTATO DE ARRANQUE Y SU CONEXIÓN [FRAILE,2008]. ... 21
FIG.2.12.MODELO EQUIVALENTE DEL MOTOR DE CORRIENTE DIRECTA (ADAPTADO DE [SARMA,1997]). ... 22
FIG.2.13.DIAGRAMA DE BLOQUES REPRESENTANDO LAS ECUACIONES (2.35) Y (2.36)[SARMA,1997]. ... 24
FIG.2.14.DIAGRAMA DE BLOQUES REPRESENTANDO LA ECUACIÓN (2.38)[SARMA,1997]. ... 25
FIG.2.15.CIRCUITO ELÉCTRICO ANÁLOGO PARA EL MOTOR DE C.D. CON EXCITACIÓN INDEPENDIENTE [SARMA, 1997]. ... 26
FIG.2.16.CIRCUITO EXPERIMENTAL PARA LA MEDICIÓN DE LA INDUCTANCIA SATURADA DEL CAMPO EN PARALELO [IEEE,1985]. ... 30
FIG.2.17.DERIVACIONES DEL MOMENTO DE INERCIA POR EL MÉTODO DE RETARDO [IEEE,1985]. ... 30
FIG.3.1DIAGRAMA TÍPICO DEL CIRCUITO DEL SISTEMA AUXILIAR DE C.D. DE UNA PLANTA GENERADORA (ADAPTADO DE [IEC,1997]). ... 34
FIG.3.2FUNCIÓN DE APROXIMACIÓN ESTÁNDAR [NIETSCH ET AL.,1999]. ... 35
FIG.3.3DIAGRAMA DE BLOQUES DEL MOTOR DE C.D. CON EXCITACIÓN INDEPENDIENTE DURANTE EL CORTOCIRCUITO [NIETSCH ET AL.,1999]. ... 36
FIG.3.4CORRIENTE DE CORTOCIRCUITO DE UNA MÁQUINA DE C.D. A VELOCIDAD CONSTANTE Y EXCITACIÓN NOMINAL; [NIETSCH ET AL.,1999]. ... 38
FIG.3.5CORTOCIRCUITO DE UNA MÁQUINA DE C.D. [NIETSCH ET AL.,1999]. ... 41
FIG.3.6CIRCUITO EQUIVALENTE DEL MOTOR DE C.D. CON EXCITACIÓN INDEPENDIENTE PARA EL CÁLCULO DE LA CORRIENTE DE CORTOCIRCUITO [IEC,1997]. ... 42
Página
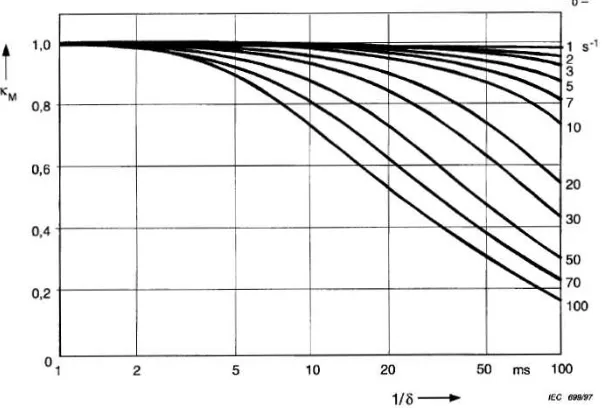
FIG.3.8.FACTOR Y PARA DETERMINAR EL TIEMPO Y LA CONSTANTE DE ELEVACIÓN DE TIEMPO
PARA VELOCIDAD NOMINAL Y DECRECIENTE CON [IEC,1997]. ... 45
FIG.3.9.TIEMPO PARA EL PICO PARA UNA VELOCIDAD DECRECIENTE CON [IEC,1997]. ... 45
FIG.3.10.FACTOR PARA DETERMINAR LA CONSTANTE DE ELEVACIÓN DEL TIEMPO PARA VELOCIDAD DECRECIENTE CON [IEC,1997]. ... 46
FIG.3.11.FACTOR PARA LA DETERMINACIÓN DE LA CONSTANTE DE DECAIMIENTO DE TIEMPO PARA VELOCIDAD DECRECIENTE CON [IEC,1997]. ... 46
FIG.3.12.FUNCIÓN DE APROXIMACIÓN ESTÁNDAR DE LA CORRIENTE PARCIAL DE CORTOCIRCUITO DEL MOTOR DE C.D.[NIETSCH ET AL.,1999]. ... 49
FIG.3.13.CARACTERÍSTICAS TÍPICAS DE LA CORRIENTE DE CORTOCIRCUITO DE UN MOTOR DE C.D.[IEEE,2007]. ... 50
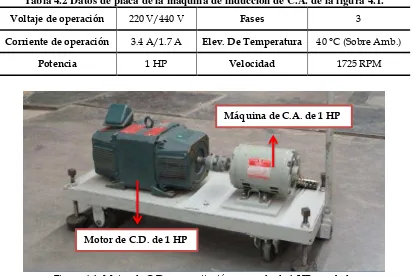
FIGURA 4.1.MOTOR DE C.D. CON EXCITACIÓN SEPARADA DE 1HP ACOPLADO A UNA MÁQUINA DE INDUCCIÓN DE C.A. DE 1HP. ... 54
FIGURA 4.2MEDICIÓN DE LA RESISTENCIA DE ARMADURA MEDIANTE EL MÉTODO VÓLTMETRO-AMPÉRMETRO. ... 55
FIGURA 4.3MEDICIÓN DIRECTA DE LA RESISTENCIA DE ARMADURA MEDIANTE EL PUENTE LCR... 55
FIGURA 4.4MEDICIÓN DE LA INDUCTANCIA DE ARMADURA MEDIANTE DIVERSOS INSTRUMENTOS. ... 56
FIGURA 4.5MEDICIÓN DE LA RESISTENCIA DE CAMPO MEDIANTE EL MÉTODO VÓLTMETRO-AMPÉRMETRO. ... 57
FIGURA 4.6.MEDICIÓN DIRECTA DE LA RESISTENCIA DE CAMPO MEDIANTE EL PUENTE LCR. ... 57
FIGURA 4.7MEDICIÓN DE LA INDUCTANCIA DE CAMPO MEDIANTE EL PUENTE LCR. ... 58
FIGURA 4.8MEDICIÓN DE LA MASA DEL ROTOR DEL MOTOR DE C.D. DE 1HP. ... 59
FIGURA 4.9DIMENSIONES DEL ROTOR DEL MOTOR DE C.D. DE 1HP. ... 60
FIGURA 4.10MEDICIÓN DE LA MASA DEL ROTOR DE LA MÁQUINA DE CA. DE 1HP. ... 60
FIGURA 4.11DIMENSIONES DEL ROTOR DE LA MÁQUINA DE C.A. DE 1HP. ... 61
FIGURA 4.12DIAGRAMA ELÉCTRICO DEL SISTEMA DE PRUEBA PARA LA VALIDACIÓN DE LOS PARÁMETROS DEL MOTOR DE C.D. ... 62
FIGURA 4.13DIAGRAMA ELÉCTRICO DEL SISTEMA DE PRUEBAS CON INSTRUMENTOS DE MEDICIÓN. ... 63
FIGURA 4.14MEDICIÓN DE LA CARGA EN WATTS A TRAVÉS DEL POWERPAD. ... 64
FIGURA 4.15MEDICIÓN DE LA VELOCIDAD DEL MOTOR CON EL TACÓMETRO TIPO LASER. ... 64
FIGURA 4.16BLOQUE REPRESENTATIVO DE UN MOTOR DE C.D. CON EXCITACIÓN INDEPENDIENTE, PROPORCIONADO POR EL SOFTWARE SIMULINK. ... 65
FIGURA 4.17INTRODUCCIÓN DE LOS PARÁMETROS MEDIDOS DEL MOTOR EN EL BLOQUE. ... 66
FIGURA 4.18MODELO DIGITAL PARA LA VALIDACIÓN DE LOS PARÁMETROS DEL MOTOR. ... 67
FIGURA 4.19MEDICIÓN DIGITAL DE LA CORRIENTE DE CAMPO DEL MOTOR DE C.D. ... 67
FIGURA 4.20MEDICIÓN DIGITAL DE LA CORRIENTE DE ARMADURA DEL MOTOR DE C.D. ... 67
FIGURA 4.21MEDICIÓN DIGITAL DE LA VELOCIDAD DEL MOTOR DE C.D. ... 68
Determinación de la Corriente de Cortocircuito de Motores de C.D. con Excitación Independiente
L
ISTA DE
T
ABLAS
Página
TABLA 3.1DATOS DEL MOTOR PARA EL EJEMPLO DE CÁLCULO DE CORTOCIRCUITO [IEC,1998]. ... 47
TABLA 4.1DATOS DE PLACA DEL MOTOR DE C.D. DE LA FIGURA 4.1. ... 53
TABLA 4.2DATOS DE PLACA DE LA MÁQUINA DE INDUCCIÓN DE C.A. DE LA FIGURA 4.1. ... 54
TABLA 4.3VALORES ESTIMADOS DE LA RESISTENCIA DE ARMADURA... 55
TABLA 4.4DETERMINACIÓN DE LA INDUCTANCIA DE ARMADURA. ... 56
TABLA 4.5VALORES ESTIMADOS DE LA RESISTENCIA DE CAMPO. ... 58
TABLA 4.6DETERMINACIÓN DE LA INDUCTANCIA DE CAMPO ... 59
TABLA 4.7PARÁMETROS FINALES MEDIDOS DEL MOTOR DE C.D. ... 62
TABLA 4.8RESULTADO DE LAS MEDICIONES PARA LA VALIDACIÓN DE LOS PARÁMETROS. ... 65
Determinación de la Corriente de Cortocircuito de Motores de C.D. con Excitación Independiente
G
LOSARIO DE
T
ÉRMINOS
C.A. = Corriente alterna C.D. = Corriente directa
f.c.e.m. = Fuerza contraelectromotriz f.e.m. = Fuerza electromotriz
Determinación de la Corriente de Cortocircuito de Motores de C.D. con Excitación Independiente
N
OMENCLATURA
V = Tensión eléctrica (V)
E = Tensión inducida (V)
Emed = f.e.m. media en una espira del inducido (V)
= f.e.m. generada correspondiente a la corriente a una velocidad (V)
Vesc = Caída de tensión por par de escobillas (V)
Vi= Tensión neta del inducido del motor (V)
= Voltaje en terminales para el circuito de campo (V) = Voltaje en terminales para el circuito de armadura (V) = Tensión nominal del motor (V)
= f.e.m. de la armadura instantes antes del cortocircuito (p.u.) = Tensión de excitación (V)
= Corriente nominal del motor (A) = Corriente de armadura (A)
= Corriente de campo (A)
= Corriente de cortocircuito insaturada de estado estacionario (A) = Corriente pico de cortocircuito (A)
= Corriente de cortocircuito en estado cuasi-estacionario (A) = Potencia nominal del motor (W)
Pa = Potencia electromagnética desarrollada por la máquina (W)
Pi= Potencia eléctrica absorbida por el inducido del motor (W)
Pcui = Perdidas en el cobre del inducido (W)
Pesc = Pérdidas en los contactos de las escobillas (W)
= Resistencia del circuito de campo (Ω)
= Resistencia del circuito de armadura (Ω)
= Resistencia equivalente parcial en las ramas del motor (Ω) = Resistencia del conductor en las ramas del motor (Ω)
= Resistencia transitoria del circuito de la armadura (p.u.) = Inductancia del circuito de armadura (H)
= Inductancia no saturada del circuito de armadura (H) = Inductancia del circuito de campo (H)
= Inductancia no saturada equivalente del circuito de campo sin carga (H) = Inductancia equivalente parcial en las ramas del motor (H)
= Inductancia del conductor en las ramas del motor (H) = Inductancia del circuito en una rama existente (H)
= Flujo de eje directo en las ranuras de la máquina (Wb)
Bmed= Valor medio de la inducción de los polos (T)
BM = Densidad del flujo magnético (T)
= Flujo magnético de los polos (Wb)
T = Par electromagnético (N m)
= Par electromagnético desarrollado por la máquina (N m) = Par de carga mecánico (N m)
= Par nominal del motor (N m) = Momento de inercia ( )
m = Masa ( )
n = Velocidad de rotación (r.p.m.)
= Velocidad nominal del motor (r.p.s.)
= Velocidad sin carga correspondiendo a la velocidad nominal (r.p.s.) = Velocidad angular correspondiente a la velocidad de rotación (rad/s)
Fmed = Fuerza media resultante por conductor del rotor (N)
L = Longitud (m)
= Radio externo del rotor (m)
f = Frecuencia (Hz)
p = Número de polos de la máquina
c = Circuitos derivados o ramas en paralelo
Determinación de la Corriente de Cortocircuito de Motores de C.D. con Excitación Independiente
Zc = Número de conductores del inducido
Rr = Radio del rotor (m)
= Ángulo de fase entre la tensión y la corriente (rad) = Frecuencia de oscilación (c/s)
= Tiempo para alcanzar el valor pico (s) = Tiempo de aceleración (s)
, , = Constante característica para clases de máquinas en particular = Constante de tiempo eléctrica (s)
= Constante de tiempo inercial (s) = Constante de tiempo mecánica (s)
= Constante de tiempo del circuito de campo (s) = Constante de tiempo del circuito de la armadura (s) = Constante de incremento de tiempo (s)
= Constante de decaimiento de tiempo (s) = Coeficiente de decaimiento (s)
= Relación admitancia correspondiente al cortocircuito
= Relación admitancia correspondiente al circuito de la armadura = Factor de tensión
C
APÍTULO
1:
I
NTRODUCCIÓN
1.1 PLANTEAMIENTO DEL PROBLEMA
Durante las últimas décadas se ha desarrollado una inquietud cada vez más creciente, sobre todo en el sector industrial, por saber detalladamente de qué manera la corriente de cortocircuito en los motores de C.D. con excitación independiente afecta el rendimiento del sistema eléctrico al que se encuentra conectado. Esto ha ocurrido por una gran variedad de problemas que han sufrido diversos sistemas auxiliares de C.D. alrededor del mundo, relacionados con los ajustes de elementos de protección. El cálculo de la corriente de cortocircuito en las instalaciones auxiliares de C.D. es muy importante, puesto que una estimación inexacta de su valor puede llevar a sobredimensionar los equipos de protección, elevando los costos para los dispositivos con las especificaciones requeridas. En el peor de los casos esta inexactitud puede ocasionar que se subdimensionen los elementos de protección, afectando todo el equipo conectado a la instalación en caso de una falla, e inclusive en el caso de una planta generadora de energía eléctrica, dejando al generador fuera de servicio, lo cual afecta directamente al sistema eléctrico de potencia al que se encuentra conectado. Es por esta razón que el presente trabajo determina y analiza la corriente de cortocircuito de un motor de C.D. con excitación independiente en base al método de cálculo propuesto por la norma de la IEC [IEC, 1997] y se describe el análisis de la corriente de falla del motor de C.D. como se realiza en la norma del IEEE [IEEE, 2007]. Para esto, se presenta primero la determinación de los parámetros de un motor de C.D. del Simulador Experimental de Sistemas Eléctricos de Potencia los cuales se aplican en el cálculo de la corriente de cortocircuito.
1.2 ANTECEDENTES
demostrar que la corriente de las máquinas de C.D. en cortocircuito sólido se puede expresar en términos de impedancias constantes, con valores similares a las reactancias transitoria y permanente en eje directo (X’d y Xd respectivamente) de las
máquinas síncronas [Linville and Ward, 1949], los cuales habían sido presentados en artículos en años anteriores [Doherty, 1923, Doherty and Nickle, 1928, Doherty and Nickle, 1930]. La gran ventaja de esta demostración recae en la suposición de que cualquier número de máquinas de C.D. pueden ser incluidas en una red de corriente directa que cuente o no con la conexión de baterías, rectificadores u otra maquinaria, para así poder realizar cálculos utilizando un analizador de redes o por métodos numéricos. Entonces se demostró que la corriente en cualquier máquina conectada al sistema de C.D., así como la corriente de falla total, pueden ser calculadas de una manera más precisa con el modelo propuesto por Linville y Ward.
Posteriormente, en 1952, Linville y Darling redactan un reporte en donde publican el valor promedio máximo de la elevación de la corriente de cortocircuito y la inductancia que se presentan en las terminales principales de las máquinas de corriente directa, para un amplio rango de capacidad y tamaño. Lo anterior se había desarrollado a causa de que surgió el interés por parte de los ingenieros que estaban a cargo de los sistemas eléctricos de potencia de C.D. en conocer el comportamiento transitorio de las maquinas rotatorias de C.D. y el efecto de estos transitorios sobre la operación del sistema [Darling and Linville, 1952]. Y es que por mucho tiempo se habían utilizado reglas de dedo aproximadas (criterios empíricos) para el cálculo de la corriente de cortocircuito en los sistemas eléctricos de corriente directa, las cuales con el paso del tiempo demostraron ser muy inadecuadas por su amplio margen de error.
Hasta la última década del siglo XX los procedimientos simplificados para el cálculo de la corriente de cortocircuito en sistemas auxiliares de C.D. no estaban bien definidos, pero en 1996 se publica el artículo [Berizzi et al., 1996], el cual analiza el método que propuso la “International Electrotechnical Commission” (IEC) en un
borrador de la norma titulada “Calculation of short-circuit currents in dc auxiliary installations in power plants and substations”, la cual se encontraba todavía en ese año
Capítulo 1: Introducción
En el 2003, Srdan Skok propone un nuevo modelo matemático para el cálculo de sistemas auxiliares de C.D. en plantas generadoras, considerando que el estado transitorio durante el cortocircuito debía ser tomado en cuenta en la determinación de las corrientes de falla, lo cual hasta ese entonces no se consideraba en el borrador de la norma propuesta por la IEC [Skok et al., 2003]. Este nuevo modelo no solo considera resistencias, sino también capacitancias e inductancias de los elementos en los sistemas auxiliares de C.D., así como la red activa que se encuentra alimentando al rectificador [Skok et al., 2003]. Los resultados obtenidos fueron muy relevantes para dimensionar todos los elementos de las instalaciones auxiliares de C.D., particularmente cuando se consideran dispositivos de protección para el sistema. Durante el 2005, Glowacz and Zdrojewsky presentaron un modelo matemático para el modelado del conmutador de los motores de C.D. operando en condiciones de falla [Glowacz and Zdrojewsky 2005].
Para el año 2007, Sejid Tešnjak presenta un artículo durante una conferencia en el que realiza el cálculo de la corriente de cortocircuito de un sistema auxiliar de C.D. real usando el modelo matemático definido en la norma IEC [IEC, 1997], para realizar un análisis dinámico. Los resultados fueron verificados en el mismo sitio de trabajo por medio de otras pruebas de selectividad para cortacircuitos e interruptores. Al final los resultados mostraron un grado aceptable de concordancia, con un rango de sobreestimación de 5 - 10% [Tešnjak et al., 2007], lo que resultó en otro punto a favor de la metodología empleada por la norma propuesta por la IEC.
1.3 OBJETIVO
Presentar el método teórico de la norma IEC [IEC, 1997] para determinar la corriente de cortocircuito producida por los motores de C.D. Aplicar estos conceptos utilizando un motor de C.D. real, describiendo en detalle el procedimiento de determinación de los parámetros necesarios para el cálculo.
1.4 JUSTIFICACIÓN
El desarrollo del presente trabajo se deriva de la importancia que tienen los sistemas auxiliares de C.D. en las plantas generadoras y en las subestaciones eléctricas, ya que deben brindar un suministro de energía confiable durante condiciones normales de operación o en condiciones de falla.
eléctricas. Sin embargo han ocurrido diversos casos de falla en plantas eléctricas y en sistemas eléctricos de potencia a nivel global en los últimos 40 años a causa de la mala operación de la instalación de los sistemas auxiliares de corriente directa. En la mayoría de los casos, las fallas fueron provocadas por la mala selección de los dispositivos de protección, y por ende fueron ocasionadas por inexactitudes en el cálculo de la corriente de cortocircuito total del sistema.
Dos de los casos más drásticos se dieron el sistema eléctrico de potencia de Croacia, el cual tuvo dos apagones muy críticos que fueron causados por la falla de los dispositivos de protección en el sistema auxiliar de C.D. a causa de una mala selectividad [Skok et al., 2004]:
1981 – Subestación Jarun - 110/30/10 kV- Quedó destruida la parte de 30 kV de la subestación. La región de Zagreb quedo parcialmente sin electricidad.
1996 – Subestación Koprivnica I – 110/35 kV – Quedo destruida la parte de 35 kV de la subestación. El pueblo de Koprivnica quedo parcialmente sin electricidad.
A partir de esos dos apagones se empezaron a realizar cambios en el modo tradicional de análisis y dimensionamiento de las protecciones de los sistemas auxiliares de C.D. considerando las normas de la IEC y la IEEE [IEC, 1997, IEEE, 2007]. Es por esto que cada vez se están proponiendo nuevos y mejores criterios para el cálculo de este tipo de instalaciones. Dentro de esos nuevos criterios se considera al motor de C.D. con excitación independiente como elemento primordial en el modelado de los sistemas auxiliares de C.D., por lo que el cálculo de la corriente de cortocircuito que ocurre en este tipo de elementos resulta de gran importancia para el correcto dimensionamiento de los dispositivos de protección del sistema en caso de falla. Es por ello que es necesario estudiar la contribución que tiene la corriente de falla en estos motores en las fallas del sistema de corriente directa.
1.5 LIMITACIONES
Los métodos teóricos estudiados en esta tesis son métodos establecidos en normas internacionales que pueden ser aplicados en cualquier motor de C.D. con excitación independiente.
Capítulo 1: Introducción
• La determinación de los parámetros del motor de CD con excitación independiente.
• La exactitud de los métodos de cálculo de la contribución de corriente de falla. Sin embargo, en el caso de requerir aplicar la prueba de cortocircuito a un motor de C.D. de mayor capacidad, será necesario modificar las condiciones de la prueba experimental para que se realice de manera segura.
1.6 CONTENIDO DE LA TESIS
Capítulo 1: Introducción.
El primer capítulo corresponde a la introducción, dentro del mismo se establece el planteamiento del problema que es el factor que sustenta la realización del trabajo, en los antecedentes se muestran las diversas propuestas que se han creado para tratar de dar solución al problema, también se incluye el objetivo, justificación, limitaciones y alcances del trabajo. Al final del capítulo se muestra de forma condensada el contenido de la tesis.
Capítulo 2: Motor de corriente directa con excitación independiente.
En este capítulo se hace una descripción de la estructura del motor de corriente directa, así como su principio de funcionamiento. Se muestra también el modelo dinámico del motor y las ecuaciones de estado que lo describen, al final se describen las pruebas normalizadas que comúnmente se realizan para determinar sus parámetros.
Capítulo 3: Corrientes de cortocircuito del motor de CD con excitación independiente.
En este capítulo se hace una serie de análisis de la corriente de falla de los motores de C.D. en instalaciones auxiliares, también se describe la operación del motor de C.D. en cortocircuito y se muestra la metodología de cálculo propuesta por la IEC y por la IEEE respectivamente.
Capítulo 4: Pruebas experimentales y cálculo de cortocircuito.
Capítulo 5: Conclusiones.
En este capítulo se presenta la conclusión general del trabajo, así como las aportaciones y recomendaciones que se basan en la experiencia obtenida durante la realización del mismo.
Referencias
C
APÍTULO
2:
M
OTOR DE
C
ORRIENTE
D
IRECTA
CON
E
XCITACIÓN
I
NDEPENDIENTE
2.1 INTRODUCCIÓN
Un motor de C.D. transforma la energía eléctrica de entrada en energía mecánica de salida. Básicamente consiste en una dínamo trabajando en régimen inverso, lo cual se puede explicar de acuerdo al principio de reciprocidad electromagnética formulado por Faraday y Lenz.
La ventaja fundamental de los motores de C.D. frente a los motores de C.A. ha sido su mayor grado de flexibilidad para el control de la velocidad y del par, lo cual ha hecho muy significativa su aplicación en los sectores donde se requieren amplios límites de regulación de la frecuencia de rotación diversos accionamientos industriales: trenes de laminación, telares, tracción eléctrica, etc. Sin embargo, debe destacarse que debido al desarrollo tan espectacular de la electrónica de potencia, su aplicación incluso en estos campos, en los que mantenía su primacía hasta finales del siglo XX se ha ido reduciendo en pro de los motores de C.A. cuyo costo de fabricación y mantenimiento es más reducido. La puesta en servicio de un motor en particular depende de la carga mecánica que tiene soportar [Hughes, 2006].
La corriente directa para alimentar a los motores se obtiene con el auxilio de generadores de corriente directa o a través de instalaciones rectificadoras que transforman la corriente alterna en directa. A menos que se especifique otra cosa, se supondrá que el voltaje de entrada es constante, ya que esta condición simplifica los análisis que se realizarán.
2.1.1 Clasificación
1. Motor de C.D. con excitación independiente.
Es un motor cuyo circuito de campo es alimentado por una fuente de potencia separada de voltaje constante. En las aplicaciones industriales de los motores de C.D. es la configuración más extendida.
2. Motor de C.D. con excitación en derivación o paralelo.
También conocida como conexión shunt, es aquel motor cuyo circuito de campo obtiene su potencia directamente de las terminales del inducido del motor. Consiste en bobinados de muchas vueltas y conductores con calibres pequeños.
Como se considera que el voltaje de alimentación es constante, no hay diferencia entre esta máquina y la de excitación independiente, a menos que se especifique lo contrario.
3. Motor de C.D. serie.
Es un motor cuyo devanado de campo relativamente consta de unas pocas vueltas conectadas en serie con el circuito del inducido. Consiste en bobinados de pocas vueltas y conductores con calibres gruesos.
4. Motor de C.D. compuesto.
Es aquel motor en el que parte del devanado de excitación se conecta en serie y otra parte en paralelo.
La gran ventaja que posee el motor de C.D. con excitación independiente recae en la gran profundidad de regulación de la frecuencia de rotación y del par mecánico, también que conserva un alto rendimiento en toda la banda de regulación y puede tener características mecánicas que respondan a exigencias especiales [Ivanov, 1980].
2.2 ESTRUCTURA
La máquina de C.D. se encuentra constituida por una parte fija o estator y una parte móvil o rotor. En la Figura 2.1 se muestra un esquema básico de la forma física que presenta este tipo de máquinas. El estator está formado por la culata (1), que pertenece al circuito magnético inductor y que ejerce la función de soporte mecánico del conjunto. En las máquinas de pequeña potencia se construye de hierro fundido pero en las máquinas grandes se realiza con plancha de acero curvada sobre un molde cilíndrico y posteriormente soldada en su base. La culata o carcasa contiene también a los pies (13) sobre los que se apoyará la máquina.
Capítulo 2: Motor de Corriente Directa con Excitación Independiente
inductor o de excitación (8). La parte de los polos próxima al rotor presenta una expansión magnética denominada zapata polar (3). Para mejorar la conmutación, estas máquinas suelen llevar también unos polos intermedios (4) y (5), que reciben también el nombre de interpolos, polos auxiliares o polos de conmutación; el devanado de estos polos se conecta en serie con el inducido.
[image:31.612.199.436.243.419.2]El rotor está constituido por el inducido (6) y el colector de delgas o conmutador (10). El inducido está construido con discos de chapa de acero al silicio convenientemente ranurado para alojar en él el correspondiente devanado. En la Figura 2.1 el devanado del inducido (7) es del tipo en anillo, que hoy día ya no se emplea por el poco aprovechamiento que se obtiene del cobre [Fraile, 2008].
Fig. 2.1. Aspectos constructivos de una máquina de C.D. (Adaptada de [Fraile, 2008]).
En la actualidad, los devanados están arrollados en forma de tambor, disponiendo ambos lados activos de las espiras en las generatrices externas del apilamiento del rotor. Los devanados de las máquinas de corriente directa son cerrados, lo cual indica que el bobinado se cierra sobre sí mismo sin principio ni fin. Los devanados pueden ser imbricados u ondulados, dependiendo si se cruzan o no las partes de la bobina observadas desde el lado del colector. En la Figura 2.2 se muestran ambos tipos de devanados en perspectiva y en forma desarrollada en inducidos de tambor.
Se puede observar en ambos casos que las bobinas que forman los devanados (imbricado u ondulado) constan de dos lados activos que se sitúan debajo de polos de diferente nombre con objeto de obtener la mayor f.e.m. posible.
Uno de los principales componentes del motor de C.D. es el colector de delgas, ya que caracteriza específicamente a estas máquinas y es el encargado de la conversión mecánica de la C.A. inducida en las bobinas en C.D. de salida. Está formado por láminas de cobre o delgas cuya sección transversal tiene la forma de cola, como puede observarse en la Figura 2.3. Las delgas están aisladas entre sí y del cubo del colector por medio de un dieléctrico de mica.
Para extraer o suministrar corriente al colector se utilizan las escobillas de grafito, aunque actualmente se emplean los tipos electrografíticos y metalografíticos.
Fig. 2.2. Devanados imbricado y ondulado (Adaptada de [Fraile, 2008]).
Fig. 2.3. Sección de un conductor de delgas (Adaptada de [Fraile, 2008]).
Las escobillas permanecen inmóviles en el espacio, dispuestas en los portaescobillas, y de esta manera, mientras gira el rotor, las escobillas conservan una posición invariable con respecto a los polos de la máquina. La Figura 2.4 muestra la disposición típica de una escobilla alojada dentro del portaescobillas. La presión de la escobilla sobre el colector debe ser del orden de 0,1 a 0,15 , lo que se consigue por la acción de un muelle en espiral cuya presión se ajusta por medio de una palanca dispuesta al efecto. El portaescobillas suele ser de bronce o latón y está unido al collar o soporte por medio de un bulón convenientemente aislado. Las escobillas de la misma polaridad van juntas en paralelo al mismo terminal de salida para su conexión al exterior [Fraile, 2008].
Devanado Imbricado
Devanado Ondulado
Aislamiento de mica Cubo del colector Delga de cobre Talón de la delga
Conexión del inducido a la delga
Anillo cónico
Anillos aislantes de mica Anillos de presión
Tornillo de apriete
Ley =
Capítulo 2: Motor de Corriente Directa con Excitación Independiente
En la Figura 2.5 se muestra una vista segmentada de un motor de C. D. de 4 polos.
Fig. 2.4. Escobilla, portaescobilla y muelle de ajuste de la presión del contacto (Adaptada de [Fraile, 2008]).
Fig. 2.5. Vista segmentada de un motor de C.D. de 4 polos. Los devanados de armadura están conectados en el final del lado derecho hacia los segmentos del conmutador. Hay cuatro juegos de escobillas. Las bobinas seccionadas que rodean dos de los cuatro polos se pueden ver hacia el lado
izquierdo de los devanados finales de la armadura (Adaptada de [Hughes, 2006]).
2.3 PRINCIPIO DE FUNCIONAMIENTO
2.3.1 Introducción
Dentro del presente trabajo resulta de carácter fundamental identificar las condiciones en que la máquina de C.D. se encuentra operando tanto en régimen motor como en régimen generador.
En primer lugar, para comprender el principio de generación de la f.e.m. en las espiras del rotor, se considera el inducido en forma de anillo que se indica en la Figura 2.6. Al momento de girar el rotor, se induce una f.e.m. en los conductores que se encuentran en la cara exterior del núcleo al ser cortados por el flujo del estator. En los conductores interiores no se origina ninguna f.e.m., ya que no les atraviesa el flujo de los polos, al estar sus líneas de fuerza limitadas al circuito de baja reluctancia del anillo.
Posiciones de apriete Palanca de ajuste de la tensión del muelle Muelle
Escobilla Conductor de
cobre trenzado Tornillo de apriete
Agujero para pasar el eje
Fig. 2.6. Máquina de C.D. con inducido en anillo (Adaptada de [Fraile, 2008]).
Analizando la figura anterior se observa que el sentido de las f.e.m.s de los conductores situados debajo del polo norte son de signo contrario a las de los conductores situados debajo del polo sur (el sentido de estas f.e.m.s. se obtiene aplicando la conocida expresión: a estos conductores). De manera que la estructura de la máquina es simétrica, las f.e.m.s correspondientes a la parte izquierda del inducido serán opuestas a las de la parte derecha, y en consecuencia no circulará ninguna corriente por el devanado [Fraile, 2008].
Para poder utilizar la f.e.m. del inducido y ser capaces de llevarla a un circuito exterior, se conectan unas escobillas de salida A y R, situadas en el eje transversal de los polos para que se aprovechar la máxima f.e.m. del devanado. Estas escobillas dividen el devanado en dos ramas en paralelo con una misma f.e.m. En cada una de estas ramas, las f.e.m.s deben tener el mismo sentido, ya que de lo contrario no se utilizarían totalmente las f.e.m.s generadas en el devanado. Al eje que forma la alineación de las escobillas se le denomina línea neutra. Esta línea tiene gran importancia, pues indica las posiciones en las que se produce la inversión de f.e.m. en las bobinas del inducido pasando las espiras correspondientes de una rama paralelo a la otra.
La posición exacta de la línea neutra se puede determinar experimentalmente moviendo el collar de las escobillas hasta encontrar el punto en el que se producen las mínimas chispas en el colector de delgas.
El número de circuitos derivados coincide con el de polos en los inducidos en anillo y también en los que llevan un devanado imbricado simple. Si se denomina 2p al número de polos y 2c al número de circuitos derivados o ramas en paralelo, se tendrá: Devanado Imbricado Simple
EJE TRANSVERSAL O EJE CUDRATURA
(Línea neutra)
EJE LONGITUDINAL O EJE DIRECTO
Capítulo 2: Motor de Corriente Directa con Excitación Independiente
En los devanados ondulados simples, el número de circuitos derivados es siempre igual a 2, sea cual sea el número de polos de la máquina, es decir:
Devando Ondulado Simple Existen también devanados imbricados múltiples y ondulados en series paralelas (de Arnold) en los que el número de circuitos derivados sigue leyes diferentes a las anteriores, pero que no se considera para el propósito de este trabajo.
Durante el proceso de cálculo de la f.e.m. producida en el inducido de una máquina de C.D. debe tenerse en cuenta que en cada bobina del devanado se obtiene una f.e.m. alterna, de tal forma que en un semiperíodo de la misma, el flujo concatenado varía entre los límites y (flujo de los polos); en consecuencia, el valor medio de la f.e.m. obtenida en la bobina dentro del tiempo mencionado será:
∫
donde indica el período de la corriente. Aquí se puede que la frecuencia de la tensión generada está en función del número de polos 2p y a la velocidad de rotación
n en r.p.m. por la relación:
la f.e.m. media en una espira del inducido será:
Sin importar el modo en que las escobillas de la máquina recojan las f.e.m.s. inducidas en las distintas bobinas durante un semiperíodo, la f.e.m. resultante en el inducido será igual a la suma de las f.e.m.s. medias de las distintas bobinas que componen cada rama en paralelo del devanado. Si éste consta de Zc conductores que
forman Zc/2 bobinas y está dividido por las escobillas en 2c circuitos derivados, se
tendrán en cada rama Zc/4c bobinas conectadas en serie, que teniendo en cuenta la
relación (2.5) producirán una f.e.m. resultante de magnitud:
Vale la pena mencionar que en los generadores o dínamos esta f.e.m. se obtiene como consecuencia del movimiento del rotor por la acción de una energía mecánica de entrada y puede aprovecharse en un circuito exterior conectando una carga eléctrica que hará circular corriente por el inducido.
En los motores se puede observar otro comportamiento, el giro de la máquina es el resultado de la interacción del flujo del inductor con las corrientes del inducido al conectar éste a una red de C.D., lo que provoca una f.e.m. de reacción en el rotor que se opone al sentido de la corriente y que recibe por ello el nombre de fuerza contraelectromotriz (f.c.e.m.).
Independientemente de que la máquina de C.D. funcione como generador o como motor, el paso de una corriente continua por los conductores del inducido provoca en el rotor un par electromagnético que tiene carácter resistente para el trabajo como generador y carácter motor cuando la máquina mueve una carga mecánica. Para el cálculo de la magnitud de este par debe tenerse en cuenta que si es la corriente total del inducido, la corriente que circula por los conductores del rotor en una máquina con 2c circuitos derivados será . Si denominamos al valor medio de la inducción de los polos en los conductores del inducido y L a la longitud de los mismos, la fuerza media resultante en cada conductor, de acuerdo con la ley de Laplace será:
y que tiene sentido tangencial al rotor. Si se denomina Rr al radio del rotor y Zc al
número de conductores del inducido, se obtendrá un par resultante de magnitud:
La superficie del inducido comprendida en el paso polar de la máquina es igual a:
el valor del flujo por polo será:
expresión que llevada a (2.38) determina el par de la máquina en función del flujo por polo:
Capítulo 2: Motor de Corriente Directa con Excitación Independiente
donde es una constante determinada para cada máquina [Fraile, 2008]. Si se tiene en cuenta (2.6), la ecuación anterior puede expresarse en función de la f.e.m. del inducido, resultando:
Cuando la máquina funciona como generador este par será resistente, o sea en el caso de transformación de energía mecánica en eléctrica, y de rotación en el caso de un motor, es decir cuando se transforma energía eléctrica en mecánica. En cualquier caso, el numerador de la ecuación (2.1la) representa la potencia electromagnética que se aplica a la máquina (en régimen generador) o que se extrae de ella (régimen motor), y que es en definitiva el producto del par por la velocidad angular, es decir:
Para poder comprender a profundidad el fenómeno de producción de par en las máquinas de C.D., en la Figura 2.7 se muestra una máquina de C.D. funcionando como generador. La máquina es movida por medio de un motor primario en sentido contrario a las agujas del reloj, y se producen entonces unas f.e.m.s en los conductores cuyos sentidos se muestran en la misma figura. Al conectar una resistencia de carga entre las escobillas aparecen unas corrientes de circulación en los conductores del inducido, que al reaccionar con el campo magnético inductor provocan un par electromagnético que se opone a la rotación y que por tanto tiene carácter resistente respecto a la acción del motor primario. Para mantener la velocidad de la dínamo, el par del motor primario debe ser suficiente para equilibrar este par resistente, junto con el par de pérdidas, debido a los efectos de rozamiento, ventilación, etc.
Fig. 2.7. Máquina de C.D. funcionando como generador (Adaptada de [Fraile, 2008]).
Cuando la máquina de C.D. funciona como motor, se debe aplicar una tensión de C.D. de alimentación al inducido, que provoca una corriente de circulación por los
Par electromagnético
conductores de este devanado, cuyos sentidos se muestran en el esquema de la Figura 2.8. La interacción de estas corrientes con el flujo inductor origina un par de rotación en sentido contrario a las agujas del reloj que obliga a girar a la máquina. Esto conduce a la aparición de una f.e.m. en el inducido cuyo sentido es idéntico al estudiado para el caso de la dínamo, puesto que la rotación en ambos casos es coincidente.
Como consecuencia se tiene que la f.e.m. creada se opone a la corriente que circula por los conductores y por ello recibe el nombre de fuerza contraelectromotriz, como ya se mencionó anteriormente. El movimiento del motor se mantendrá siempre y cuando que el par electromagnético de rotación producido sea superior al par resistente ejercido por la carga mecánica conectada al árbol de la máquina.
Fig. 2.8. Máquina de C.D. funcionando como motor (Adaptada de [Fraile, 2008]).
En los motores con excitación independiente o en derivación, el flujo es aproximadamente constante; un aumento del par va acompañado de un aumento casi proporcional de la intensidad de corriente en el inducido.
[image:38.612.207.401.537.657.2]En la figura 2.9 se muestra la curva par-velocidad en estado estacionario del motor de C.D. con excitación independiente:
Fig. 2.9. Curva par-velocidad en estado estacionario (Adaptada de [Hughes, 2006]). Par
Velocidad Velocidad base
Par electromagnético
Capítulo 2: Motor de Corriente Directa con Excitación Independiente
2.3.2 Aspectos generales de funcionamiento del motor de C.D.
Como se menciona al principio de la sección 2.1, el motor de C.D. funciona en base al principio de reciprocidad electromagnética de Faraday y Lenz. Para comprender la relación de este principio básico con el funcionamiento de una máquina de C.D. se va a considerar una dínamo en derivación que suministra energía eléctrica a una red de corriente directa de tensión constante, tal como se indica en la Figura 2.10.
Fig. 2.10. Funcionamiento de la máquina de C.D. como motor y como generador (Adaptada de [Fraile, 2008]).
Aplicando la segunda ley de Kirchhoff al circuito del inducido, se obtiene la siguiente ecuación:
En la que, al redefinir como la tensión neta en el inducido nos da una corriente :
Se dice que la máquina trabaja como generador suministrando una potencia electromagnética E si la f.e.m. E es superior a la d.d.p. , entonces el sentido de la corriente en el inducido coincide con el de E, y en consecuencia, la máquina crea entonces un par resistente que se opone al de rotación, es decir, contrario al movimiento del motor primario.
Si se reduce la velocidad de rotación o la excitación del inductor para reducir la f.e.m. del generador, y E se hace menor que la tensión , la corriente del inducido cambiará de sentido, como así lo expresa la ecuación (2.13); y es donde se produce una fuerza contraelectromotriz, ya que E se opone a la corriente . En esta situación,
b) Generador a) Motor
V = constante
V = constante
Red de C.D. Red de C.D.
la máquina trabaja como motor y se produce un par electromagnético que coincide con el de rotación, lo que indica que el par ha pasado de ser resistente a ser motor. Si se desconecta el motor primario, la máquina de C.D. continuará girando en el mismo sentido que lo hacía cuando actuaba como generador pero desarrollando ella ahora su propio par motor.
El hecho de que la máquina conserve el mismo sentido de giro trabajando como generador o como motor se debe a que se ha cambiado la polaridad de la corriente en uno solo de los devanados. En las Figuras 2.10 a) y 2.10 b) se muestra esta acción, donde puede observarse que en ambos casos la corriente de excitación tiene el mismo sentido, pero que sin embargo la corriente ha cambiado de signo.
Si se considera que en el régimen de funcionamiento como motor se considera positivo, al aplicar la segunda ley de Kirchhoff al circuito del inducido de la Figura 2.10 b) se obtiene:
La cual es prácticamente la ecuación (2.13) en la que se han cambiado los signos de , y E.
Es importante mencionar que se debe obtener una ecuación del balance de potencias para determinar el proceso de transformación de energía mecánica en eléctrica en el motor de C.D. Para ello, si se multiplican ambos miembros de la ecuación (2.14) por resulta:
y de acuerdo con esta nomenclatura, el balance de potencias en el inducido se convierte en:
cuyos términos significan:
: Potencia eléctrica absorbida por el inducido del motor. : Perdidas en el cobre del inducido.
: Pérdidas en los contactos de las escobillas.
: Potencia electromagnética desarrollada por la máquina.
Capítulo 2: Motor de Corriente Directa con Excitación Independiente
Si se sustituye en esta ecuación la f.e.m. E por su valor (2.6), se obtiene la siguiente expresión:
que coincide con la ecuación (2.10) demostrada por otro procedimiento. Esta ecuación indica que el par es directamente proporcional al flujo en el entrehierro y a la corriente del inducido.
2.3.3 Características de funcionamiento de los motores de C.D.
Como ya se ha mencionado, los diferentes tipos de motores de C.D. se clasifican de acuerdo con el tipo de excitación. En cada caso el par electromagnético viene determinado por la expresión (2.18):
Desde un punto de vista práctico, los motores de C.D. presentan una gran ventaja sobre los motores de C.A. debido a su posibilidad de regulación de velocidad. De acuerdo con la ecuación (2.14), si se incluye en la resistencia del inducido y escobillas se tiene:
Teniendo en cuenta la expresión general de la f.e.m.:
y al sustituir en (2.20) despejando la velocidad n, se obtiene:
que indica la posibilidad de regular la velocidad de un motor de C.D. como consecuencia de controlar las siguientes variables [Fraile, 2008]:
20
conectar la excitación, ya que dará lugar a daños en el motor, limitado únicamente por el magnetismo remanente de los polos.
b) La tensión de alimentación V, aplicada al motor. Al disminuir o aumentar la tensión de alimentación se reduce o aumenta respectivamente la velocidad, tal como señala la ecuación (2.22).
c) La resistencia del circuito del inducido, lo que se consigue conectando en serie con este devanado una resistencia o reóstato variable. Al aumentar o disminuir la resistencia del inducido, la velocidad disminuye o aumenta respectivamente, como se acaba de deducir en la ecuación (3.22).
Estos métodos se emplean en la práctica de forma independiente o combinada para obtener unas características adecuadas al régimen de trabajo que se necesita, aunque hoy día se han sustituido por procedimientos electrónicos.
Para invertir el sentido de rotación de un motor de C.D. es necesario invertir únicamente la corriente en uno solo de los devanados: inducido o inductor. Si se modifican los sentidos de la corriente de ambos circuitos, el sentido de rotación del motor permanece sin cambios.
El proceso de arranque constituye un aspecto importante en los motores de C.D. Hay que tener en cuenta que, de acuerdo con la ecuación (3.20), la corriente del inducido tiene una magnitud:
Capítulo 2: Motor de Corriente Directa con Excitación Independiente
Fig. 2.11. Reóstato de arranque y su conexión [Fraile, 2008].
En la actualidad el arranque se hace automáticamente utilizando contactores y relés de tiempo, para conmutación de las resistencias. En los diversos esquemas de funcionamiento de las máquinas de C.D. se obtiene una mayor explicación en esta idea, explicando también las llamadas características mecánicas que expresan la relación , que tanta importancia tiene en el diseño de los accionamientos eléctricos [Fraile, 2008].
2.4 MODELO DINÁMICO DEL MOTOR DE C.D.
2.4.1 Introducción
El motor de C.D. es la base de los accionamientos eléctricos debido a su estabilidad y características lineales asociadas. Desde el punto de vista de control y para la estimación del modelo, el motor puede ser considerado como un sistema SISO (Single Input-Single Output) de una entrada y una salida [Rico, 2006].
No existe un solo modelo para representar al motor de C.D., sino que puede representarse de diferentes maneras, y por lo tanto, puede tener diferentes representaciones matemáticas, dependiendo de las perspectivas individuales.
La dinámica de un motor de C.D. se puede describir mediante ecuaciones diferenciales, y dichas ecuaciones pueden obtenerse utilizando las leyes físicas que rigen al motor.
Para el modelo del motor de C.D. las ecuaciones dinámicas varían en cierta forma, dependiendo de la configuración del motor específico. El presente trabajo se basa en la configuración de un motor de C.D. con excitación independiente, en el cual se considera constante la corriente de campo.
Reóstato de arranque Off (parada)
Inductor
En la figura 2.12 se presenta esquemáticamente el modelo de un motor de C.D. con excitación separada, en donde la flecha que indica la dirección de la corriente también indica la dirección del campo magnético asociado a ella.
+
-a e t V f i ff L f R+
-L T m e T a R aq L f V+
-a iFig. 2.12. Modelo equivalente del motor de corriente directa (Adaptado de [Sarma, 1997]).
Las ecuaciones de la tensión y del par electromagnético son las siguientes [Sarma, 1997].
donde K y k son constantes, es el flujo de eje directo en las ranuras que es directamente proporcional a la corriente de campo , es la velocidad angular correspondiente a la velocidad de rotación, es la corriente de armadura, es la tensión generada y es el par electromagnético desarrollado por la máquina.
El funcionamiento del sistema se puede describir a través de estas ecuaciones junto con las ecuaciones diferenciales de movimiento del sistema mecánico, las ecuaciones volt-amperes de los circuitos de armadura y de campo, así como la curva de magnetización, que se toma como lineal para este caso [Sarma, 1997].
La ecuación de voltaje para el circuito de campo está dada por:
donde po es el operador de Heaviside derivativo d / dt, y , , , y son el voltaje
Capítulo 2: Motor de Corriente Directa con Excitación Independiente
Como dato adicional se dice que el eje del campo de la f.m.m. se encuentra en la dirección del eje directo, y la inductancia mutua entre la armadura y el campo es cero porque sus ejes son perpendiculares entre ellos. La ecuación de voltaje para el circuito de armadura para el motor de la figura 2.4.1 está dada por:
donde , , y son el voltaje en terminales, resistencia, e inductancia mutua en el circuito de armadura respectivamente. La letra q es usada con la inductancia para indicar el eje de la f.m.m. de la armadura que se encuentra en el eje de cuadratura. La inductancia incluye el efecto de cualquier devanado del estator con eje de cuadratura en serie con la armadura, tal como los interpolos o los devanados de compensación. La ecuación dinámica para el sistema mecánico de un motor está dada por [Sarma, 1997]:
ó
donde J es el momento polar de inercia combinado de la carga y el rotor del motor, B
es la constante de fricción viscosa de la carga y el motor, y es el par mecánico de la carga (el entregado a la carga), el cual se opone a la rotación.
2.4.2 Análisis Dinámico
La función de transferencia es un instrumento para poder describir las características dinámicas de los dispositivos electromecánicos. Esta función es una formulación matemática que relacione la variable de salida (output) de un dispositivo con su variable de entrada (input).
A una corriente de campo constante en el motor, el par electromagnético y la f.e.m. generada estan dadas [Sarma, 1997]:
La ecuación diferencial para la corriente de armadura del motor esta dada por la ecuación (2.27), que puede arreglarse de la manera siguiente:
donde es el voltaje en terminales aplicado al motor, es la misma f.e.m. dada por la ecuacion (2.31), las variables y incluyen la resistencia y la inductancia serie del circuito de armadura y es la constante de tiempo eléctrica del circuito de armadura. El par electromagnético esta dado por la ecuación (2.30), y por la ecuación dinámica (2.29) para el sistema mecánico, la aceleración esta dada por:
ó
donde es la constante de tiempo mecánica, y el par de carga es . Las transformadas de Laplace de las ecuaciones (2.31) y (2.33) llegan a lo siguiente [Sarma, 1997]:
El diagrama de bloques correspondiente que representa las operaciones de arriba se muestra en la figura 2.13 en terminos de las variables de estado y con
como entrada.
+ (1 ) 1 a a R s Km
( ) a
I s T se( )
) 1 (1 m
B s
( ) m s ( ) L T s ( ) t
V s +
-m K
-( )
a Es
Capítulo 2: Motor de Corriente Directa con Excitación Independiente
La aplicación de la función de transferencia de lazo cerrado que se muestra en la figura 2.13 contribuye con la creación de la siguiente función de transferencia relacionando y con [Sarma, 1997]:
Despreciando el amotiguamiento mecánico B, la ecuación anterior se reduce a:
donde es la constante de tiempo inercial, y el diagrama de bloques correspondiente se muestra en la figura 2.14.
+ (1 ) 1 a a R s Km
( ) a
I s T se( ) 1
( )Js
( ) m s ( ) L T s ( ) t
V s +
-m K
-( )
a Es
Fig. 2.14. Diagrama de bloques representando la ecuación (2.38) [Sarma, 1997].
La función de transferencia que relaciona la velocidad y el par de carga con se puede obtener de la figura 2.14 eliminando la retroalimentación arreglando la ecuación de la siguiente manera:
Expresando la ecuación del par para el sistema mecánico como:
La ecuación anterior puede identificarse como la ecuación nodal para el circuito paralelo - - , con:
Con los elementos anteriores se puede crear un circuito eléctrico análogo como el que se muestra en la figura 2.15 para un motor de C.D. con excitación independiente, en donde la inercia está representada por una capacitancia, el amortiguamiento por una conductancia en paralelo, y el componente carga-par de la corriente está fluyendo a través de una impedancia equivalente . Las constantes de tiempo asociada con la inercia y asociada con el par de carga de tipo amortiguador que es proporcional a la velocidad, en términos del circuito análogo, están dadas por:
-m a L L K e Z T t V 2 m B Geq K + -2 m J Ceq K a
e
a i aqL Ra
Fig. 2.15. Circuito eléctrico análogo para el motor de C.D. con excitación independiente [Sarma, 1997].
En el análisis anterior es proporcional a la corriente de campo constante del motor .
La inductancia mutua de la armadura puede ser despreciada la mayoría de las veces, excepto en el caso de los motores que tienen una carga con pulsaciones de par rápidas de magnitud apreciable.
2.5 PRUEBAS NORMALIZADAS PARA LA DETERMINACIÓN DE PARAMETROS DEL MODELO
2.5.1 Introducción
Capítulo 2: Motor de Corriente Directa con Excitación Independiente
al obtener los parámetros del modelo de la máquina. A pesar de que para la realización de este trabajo se siguió otra metodología para la medición de los parámetros del motor de C.D., se consideró prudente dar a conocer la existencia de otros métodos.
2.5.2 Medición de la resistencia de los devanados
La resistencia de los devanados del motor de C.D. se determina para poder verificar la completa conexión de los mismos, así como para calcular las perdidas por , y para establecer una resistencia de referencia a una temperatura en específico y ser usada en la determinación de la temperatura promedio del devanado.
El proceso de medición se llevara a cabo conforme a lo establecido en la norma IEEE std 118 [IEEE, 1978]. La temperatura promedio del devanado debe ser anotada en cuanto se realice la medición de la resistencia del mismo [IEEE, 1985].
La ecuación que se usará para corregir la resistencia medida de una temperatura determinada a una temperatura común estándar, como lo son 20 °C, es:
donde:
Resistencia del devanado [Ω] medida a una temperatura estándar [°C].
Resistencia del devanado [Ω] medida a una temperatura [°C].
234.5 para el Cu. 225.0 para el Al.
El método de medición a través de puentes será el que se utilizará preferentemente para la realización de las pruebas.
2.5.3 Resistencia del devanado de la armadura
1.- Devanado de la armadura. Método A:
Usando este método, la resistencia de la armadura se puede determinar aplicando un puente de resistencias a través de un par de segmentos del conmutador lo más cerca posible a la curvatura de alguno de los polos. En el caso de tener devanados dúplex, cada contacto de salida del puente debe cubrir dos segmentos adyacentes.
Método B:
Es el método preferible por su rapidez y efectividad. Aquí se emplea una baja resistencia con un arnés que se conecta al devanado del rotor, ya sea en las puntas externas, en los clips finales, o en los segmentos del conmutador para hacer contacto con el devanado del rotor en cada punto de la escobilla.
La resistencia medida cuando se conecta el puente entre las terminales del arnés de la resistencia simulando las escobillas positivas y negativas se considera como la resistencia del devanado del rotor. Se debe tener cuidado al reducir la resistencia de contacto hacia un valor demasiado bajo.
2.- Devanado del campo conmutador.
Generalmente la resistencia de este devanado se puede medir directamente en sus terminales. Si alguna de las partes finales del devanado está permanentemente conectada a la escobilla, la resistencia del campo conmutador se debe medir entre este punto y el punto exterior del devanado.
3.- Devanados del campo compensador.
Si se considera de manera independiente al devanado del campo del conmutador, la resistencia de este devanado deberá medirse directamente en sus terminales.
4.- Devanados del campo serie.
La resistencia se debe medir en las terminales de todos los diferentes devanados. Si algún devanado está permanentemente conectado a otro devanado estacionario y solo con una conexión distinta de unión entre los devanados, la resistencia del campo se debe medir entre la terminal y esta conexión.
5.- Devanados del campo en paralelo.
![Fig. 2.1. Aspectos constructivos de una máquina de C.D. (Adaptada de [Fraile, 2008]).](https://thumb-us.123doks.com/thumbv2/123dok_es/4988939.76562/31.612.199.436.243.419/fig-aspectos-constructivos-maquina-c-d-adaptada-fraile.webp)
![Fig. 2.9. Curva par-velocidad en estado estacionario (Adaptada de [Hughes, 2006]).](https://thumb-us.123doks.com/thumbv2/123dok_es/4988939.76562/38.612.207.401.537.657/fig-curva-par-velocidad-estacionario-adaptada-hughes.webp)
![Fig. 3.1 Diagrama típico del circuito del sistema auxiliar de C.D. de una planta generadora (Adaptado de [IEC, 1997])](https://thumb-us.123doks.com/thumbv2/123dok_es/4988939.76562/56.612.156.432.182.589/diagrama-tipico-circuito-sistema-auxiliar-planta-generadora-adaptado.webp)
![Fig. 3.2 Función de aproximación estándar [Nietsch et al., 1999].](https://thumb-us.123doks.com/thumbv2/123dok_es/4988939.76562/57.612.141.492.384.623/fig-funcion-aproximacion-estandar-nietsch-et.webp)
![Fig. 3.3 Diagrama de bloques del motor de C.D. con excitación independiente durante el cortocircuito [Nietsch et al., 1999]](https://thumb-us.123doks.com/thumbv2/123dok_es/4988939.76562/58.612.132.475.460.678/fig-diagrama-bloques-motor-excitacion-independiente-cortocircuito-nietsch.webp)