Análisis Cinemático De Tres Mecanismos Para La Orientación Angular Coordinada E Individual De Los Álabes De Un Rotor De Eje Vertical
131
0
0
Texto completo
(2) ANÁLISIS CINEMÁTICO DE TRES MECANISMOS PARA LA ORIENTACIÓN ÁNGULAR COORDINADA E INDIVIDUAL DE LOS ÁLABES DE UN ROTOR DE EJE VERTICAL. ESTEBAN CAMILO APONTE BERMUDEZ JHON EDINSON GUZMAN MORENO. Trabajo de grado para optar al título de Tecnólogo Mecánico Modalidad monografía. Director HENRY MORENO ACOSTA Ingeniero Mecánico. UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS FACULTAD TECNOLÓGICA PROYECTO CURRICULAR DE MECÁNICA BOGOTÁ D.C. 2016 2.
(3) Nota de Aceptación. Presidente del Jurado. Jurado. Jurado. Bogotá D.C. 22 agosto del 2016.. 3.
(4) AGRADECIMIENTOS. . Al Ing. Henry Moreno por su apoyo y asesoría a tiempo y fuera de tiempo para el desarrollo de esta monografía.. . A la Universidad Distrital Francisco José de Caldas – Facultad Tecnológica por haber sido la unidad proveedora de alimento intelectual y brindarnos las facilidades en el uso de sus instalaciones para realizar la recopilación de informaciones teóricas y prácticas para la presente monografía.. . A nuestras familias por su apoyo incondicional en cada momento para poder desarrollarnos como profesionales.. . A los profesores y amigos que nos acompañaron y de quienes siempre recibimos lo mejor.. 4.
(5) INDICE 1. INTRODUCCIÓN ............................................................................................ 13 2. ANTECEDENTES Y JUSTIFICACIÓN. .......................................................... 14 3. PLANTEAMIENTO DEL PROBLEMA. ............................................................ 14 3.1.. DEFINICIÓN DEL PROBLEMA ................................................................ 14. 4. OBJETIVOS.................................................................................................... 19 4.1.. OBJETIVO GENERAL ............................................................................. 19. 4.2.. OBJETIVOS ESPECÍFICOS .................................................................... 19. 5. MARCO TEÓRICO CONCEPTUAL. ............................................................... 19 5.1. MECANISMOS............................................................................................ 19 5.1.1. DEFINICIÓN DE MECANISMOS Y MÁQUINAS ...................................................... 19 5.1.2. APLICACIONES DE LA CINEMÁTICA ..................................................................... 20 5.1.3. TIPOS DE MOVIMIENTO ...................................................................................... 21 5.1.4. GRADO DE LIBERTAD O MOVILIDAD ................................................................... 22 5.1.5. ANÁLISIS DE POSICIÓN ........................................................................................ 22 5.1.6. ANÁLISIS DE VELOCIDAD. .................................................................................... 23 5.1.7. ANÁLISIS DE ACELERACIÓN. ................................................................................ 23 5.2. TURBO MÁQUINA ...................................................................................... 24 5.3. ÁLABE ........................................................................................................ 24 5.4. ROTOR. ...................................................................................................... 24 5.5. RODETE ..................................................................................................... 24 6. DESARROLLO DE LA PROPUESTA. ............................................................ 25 6.1. Definición de los tres mecanismos para la orientación angular coordinada e individual de los álabes de un rotor de eje vertical .......................................... 25 6.1.1.. Mecanismos considerados.............................................................................. 25. 6.1.1.1. Mecanismo 1. .............................................................................. 25 6.1.1.2. Mecanismo 2. .............................................................................. 28 6.1.1.3. Mecanismo 3. .............................................................................. 31 6.1.1.4. Mecanismo 4. .............................................................................. 32 6.1.1.5. Mecanismo 5. .............................................................................. 35 5.
(6) 6.1.1.6. Mecanismo 6. .............................................................................. 39 6.1.2.. Selección de los tres mecanismos a estudiar. ...................................... 40. 6.1.2.1. Criterios de evaluación ................................................................ 40 6.1.2.2. Matriz de decisión de todos los mecanismos. ............................. 42 6.2.. Análisis cinemático de cada uno de los mecanismos............................... 43. 6.2.1.. MECANISMO N° 1. .......................................................................................... 43. 6.2.1.1. Grados de libertad (Movilidad) .................................................... 49 6.2.1.2. La condición de Grashof. ............................................................ 50 6.2.1.3. Análisis de posición. .................................................................... 52 6.2.1.4. Análisis de velocidad. .................................................................. 60 6.2.1.5. Análisis de aceleración. .............................................................. 64 6.2.2.. MECANISMO N° 2 ........................................................................................... 67. 6.2.2.1. Grados de libertad. ...................................................................... 70 6.2.2.2. La condición de grashof. ............................................................. 71 6.2.2.3. Generalidades para la construcción gráfica. ............................... 73 6.2.2.4. Análisis de posición. .................................................................... 76 6.2.2.5. Análisis de velocidad. .................................................................. 84 6.2.2.6. Análisis de Aceleración. .............................................................. 89 6.2.3.. MECANISMO 3 ................................................................................................ 93. 6.2.3.1. Análisis de posición, velocidad y aceleración del mecanismo..... 95 6.3.. Modelos gráficos y simulaciones cinemáticas computacionales. ........... 102. 6.3.1.. Mecanismo No. 1 .......................................................................................... 102. 6.3.2.. Mecanismo No. 2 .......................................................................................... 108. 6.3.3.. Mecanismo No. 3 .......................................................................................... 115. 7. CONCLUSIONES Y RECOMENDACIONES ................................................ 120 8. ANEXOS. ...................................................................................................... 122 9. BIBLIOGRAFIA ............................................................................................. 131 9.1.. WEBGRAFÍA .......................................................................................... 131. 6.
(7) LISTA DE TABLAS Tabla 1. Factores de ponderación para cada criterio. ........................................... 42 Tabla 2. Tabla de decisión de los tres mecanismos más óptimos......................... 42 Tabla 3. Iteraciones para demostrar que θ2= θ4 .................................................... 55 Tabla 4. Iteraciones para demostrar que el ángulo de la biela no varía. ............... 58 Tabla 5. Descripción de variables para hallar el ángulo θ2 y θ4 con resultado. ..... 80 Tabla 6. Velocidades angulares y lineales calculadas para el mecanismo base en distintos ángulos.................................................................................................... 86 Tabla 7. Valores de aceleración calculada para distintos ángulos del mecanismo propuesto. ............................................................................................................. 90. 7.
(8) LISTA DE FIGURAS Figura 1. Representación general en vista isométrico de una turbina eólica en (a) ensamblada y (b) explosionada. Los autores. 2015. ............................................. 15 Figura 2. Representación general en vista de planta de un rotor de eje vertical. Los autores, 2015. ....................................................................................................... 16 Figura 3. Descripción Gráfica de la acción del viento y su efecto en el rotor de eje vertical. Los autores, 2015. ................................................................................... 17 Figura 4. Representación esquemática del rotor eólico con velocidades tangenciales, nótese que el eje principal se toma como un origen de coordenadas con sus respectivos cuadrantes. Los autores. 2015. ............................................. 18 Figura 5. Movimiento perpetuo / Perpetual Motion (Idea). Pedro Dueñas. 2015. .. 26 Figura 6. Perpetual Motion. Shifted Levers. Veproject 1. 2015. ............................ 26 Figura 7. Modificación de la Figura 18 para mostrar los mecanismos. Los autores. 2015. ..................................................................................................................... 27 Figura 8. Wind-mill 1ª en 8 posiciones diferentes. Duc Thang,Nguyen. Vietnam. 2010. ..................................................................................................................... 28 Figura 9. Componentes principales del segundo mecanismo. Los autores. 2015. .............................................................................................................................. 30 Figura 10. Detalle de uno de los brazos para mostrar el mecanismo de cuatro barras implementado en el segundo ejemplo. Los autores. 2015. ....................... 30 Figura 11. Dos posiciones del rotor Sam Weiss - VAWT Concept (Revised).avi. 2010. ..................................................................................................................... 31 Figura 12. Sam Weiss. Anonimo. 2010. ................................................................ 32 Figura 13. Vertical Axis Wind Turbine (VAWT) Type: Pivoted Panel. Canal Sveasun1. 2009. ................................................................................................... 33 Figura 14. Esquema mecanismo 4. Los autores. 2015. ........................................ 34 Figura 15. Mecanismo del rotor 4. Los autores. 2015. .......................................... 34 Figura 16. Wind mill Innovative high-energy potential. Pierre Dieudonné, 2013. .. 35 Figura 17. Descripción general de la configuración del mecanismo número 5. Los autores. 2015. ....................................................................................................... 36 Figura 18. Visualización de velocidades tangenciales de distintos puntos en el rotor. Los autores. 2015. ....................................................................................... 37 Figura 19. Descripción Gráfica del mecanismo para la configuración número 1. Los autores. 2015. ....................................................................................................... 38 Figura 20. Keeping direction unchanged during rotation 9b. Thang, Nguyen Duc. 2014 ...................................................................................................................... 39 Figura 21. Repost Figura 5 de la Unidad 7.1.1.1 ................................................... 43 Figura 22. Modificaciones en álabes del mecanismo tomado en la red. Los autores. 2016. ....................................................................................................... 43 8.
(9) Figura 23. Representación de los tres sub-mecanismos que intervienen. Los autores. 2016. ....................................................................................................... 44 Figura 24 Detalle de mecanismo base. Los autores. 2016. .................................. 44 Figura 25. Detalle de los eslabones que conforman el mecanismo base. Los autores. 2016. ....................................................................................................... 45 Figura 26. Esquema del eslabón A (biela) con el álabe. Los autores. 2016. ......... 46 Figura 27. Diámetro total de uso como factor de diseño. Los autores. 2016. ....... 47 Figura 28. Detalle composición de un radio. Los autores. 2016. ........................... 47 Figura 29. Circunferencia trazada por los álabes. Los autores. 2016. .................. 48 Figura 30. Resultado de la longitud del brazo. Los autores. 2016......................... 48 Figura 31. Modelo pictórico con modelo cinemático (diagrama de cuerpo libre). .. 51 Figura 32. Modelo para diagrama de cuerpo libre. Los autores. 2016. ................. 53 Figura 333 Diagrama de cuerpo libre para estudio de velocidades. Norton Robert. 2005. ..................................................................................................................... 60 Figura 34. Wind-mill 1ª, Descripción simplificada del rotor realizada por el autor. Duc Thang,Nguyen. Vietnam. 2010. ..................................................................... 69 Figura 35. Detalle sub-mecanismo fundamental. Izquierda: mecanismo a estudiar. Derecha: Composición de cuatro barras a partir de la imagen de la izquierda tomando como referencia los puntos A y B. Los autores. 2016. ........................... 70 Figura 36. Detalle de eslabones. Izquierda: designación 4 barras para el mecanismo Nº 2. Derecha: Inversión de eslabonamiento de Grashof de cuatro barras, Diseño de maquinaria, Norton (2005). ...................................................... 71 Figura 37. Construcción de un boceto a partir de mediciones a escala. Los autores. 2016. ....................................................................................................... 72 Figura 38. Esquema modelo del mecanismo. Los autores. 2016. ......................... 73 Figura 39. Dibujo del Eslabón 3 o biela. Los autores. 2016. ................................. 74 Figura 40. Dibujo de eslabones 2 y 4 o manivelas. Los autores. 2016. ................ 74 Figura 41. Modelo de ideal del mecanismo. Los autores. 2016. ........................... 75 Figura 42. Izquierda: El álabe se encuentra en posición perpendicular a la dirección del viento. Derecha: El álabe se encuentra paralelo a la dirección del viento. (El viento está representado por las flechas de color negro). Los autores. 2016. ..................................................................................................................... 76 Figura 43. Se ordena el mecanismo de 4 Barras a un plano cartesiano y se renombran los puntos según la teoría. Los autores. 2016. ................................... 77 Figura 44. Posiciones a analizar en el mecanismo. El sentido de giro del mecanismo es contrario a las manecillas del reloj. Los autores. 2016. ................. 77 Figura 45. Boceto pictórico del mecanismo con ángulos en una posición inicial. Los autores. 2016. ....................................................................................................... 81 Figura 46. Dirección de velocidades y ángulos. Los autores. 2016. ...................... 84. 9.
(10) Figura 47. Especificación del mecanismo repetido matricialmente. Los autores. 2016. ..................................................................................................................... 93 Figura 48. Composición Polea- Correa y álabe. Los autores. 2016. ..................... 94 Figura 49. Representación real de polea – correa. Robert Norton. 2005. ............. 94 Figura 50. Diagrama de cuerpo libre real de polea – correa. Robert Norton. 2005. .............................................................................................................................. 95 Figura 51. Posicionamiento de álabe en distintas posiciones. Los autores. 2016. 95 Figura 52. Engranaje epicíclico. Robert Norton. 2015. .......................................... 96 Figura 53. Velocidades y ángulo que intervienen. ................................................. 96 Figura 54. Detalle longitudes de las poleas. Los autores. 2016. ........................... 98 Figura 55. Movimientos trazados por el álabe. Los autores. 2016. ....................... 99 Figura 56 Visualización ideal del mecanismo No. 1 construido. .......................... 102 Figura 57 Plano 1 de 5 mecanismo No. 1 ........................................................... 103 Figura 58 Plano 2 de 5 mecanismo No. 1 ........................................................... 104 Figura 59 Plano 3 de 5 mecanismo No. 1 ........................................................... 105 Figura 60 Plano 4 de 5 mecanismos No. 1 ......................................................... 106 Figura 61 Plano 5 de 5 mecanismo No. 1 ........................................................... 107 Figura 62 Visualización ideal del mecanismo No. 2 construido. .......................... 108 Figura 63 Ensamble del mecanismo n° 2. ........................................................... 109 Figura 64 Plano 1 de 5 mecanismo No. 2 ........................................................... 110 Figura 65 Plano 2 de 5 mecanismo No. 2 .......................................................... 111 Figura 66 Plano 3 de 5 mecanismo No. 2 .......................................................... 112 Figura 67 Plano 4 de 5 mecanismo No. 2 .......................................................... 113 Figura 68 Plano 5 de 5 mecanismo No. 2 .......................................................... 114 Figura 69 Visualización ideal del mecanismo No. 3 construido. .......................... 115 Figura 70 Plano 1 de 4 mecanismo No. 3 ........................................................... 116 Figura 71 Plano 2 de 4 mecanismo No. 3 ........................................................... 117 Figura 72 Plano 3 de 4 mecanismo No. 3 ........................................................... 118 Figura 73 Plano 4 de 4 mecanismo No. 3 ........................................................... 119. 10.
(11) LISTA DE GRAFICAS Gráfica 1 Cambio de ángulo para cada eslabón del mecanismo 1 respecto al tiempo. Software Working Model 2D. Los autores. 2016. ..................................... 59 Gráfica 2 Velocidades de los eslabones del mecanismo 1 contra el tiempo. Software Working Model 2D. Los autores. 2016. .................................................. 63 Gráfica 3. Aceleración de los eslabones del mecanismo 1 respecto al tiempo. Software Working Model 2D. Los autores. 2016. .................................................. 67 Gráfica 4 Ángulo de entrada del mecanismo 2 respecto al ángulo de salida del álabe. Microsoft Excel. Los autores. 2016. ............................................................ 82 Gráfica 5 Ángulo de entrada del mecanismo 2 y de salida del álabe respecto al tiempo. Working Model 2D. Los autores. 2016...................................................... 83 Gráfica 6 Velocidades angulares y lineales de los eslabones respecto al ángulo de entrada. Microsoft Excel. Los autores. 2016. ........................................................ 87 Gráfica 7 Velocidad Lineal de la Junta B respecto al tiempo. Software CAD Solidworks. Los autores. 2016. ............................................................................. 87 Gráfica 8 Velocidad lineal de la Junta A respecto al tiempo. Software CAD Soliworks. Los autores. 2016. ............................................................................... 88 Gráfica 9 Velocidad Angular del eslabón 3 (biela) respecto al tiempo. Software CAD Soliworks. Los autores. 2016. ....................................................................... 88 Gráfica 10 Velocidad angular del eslabón 4 respecto al tiempo. Software CAD Soliworks. Los autores. 2016. ............................................................................... 89 Gráfica 11 Aceleraciones del mecanismo respecto ángulo recorrido. Microsoft Excel. Los autores. 2016. ...................................................................................... 91 Gráfica 12 Aceleración angular de la biela respecto al tiempo. Software CAD Solidworks. Los autores. 2016. ............................................................................. 92 Gráfica 13 Aceleración del Eslabón n° 3 respecto al tiempo. Software CAD Soliworks. Los autores. 2016. ............................................................................... 92 Gráfica 14 Ángulo del brazo en el tiempo. Solidworks. Los autores. 2016 ........... 99 Gráfica 15 Ángulo de engranaje planetario respecto al tiempo. Solidworks. Los autores. 2016 ...................................................................................................... 100 Gráfica 16 Velocidad angular tomada por el brazo respecto al tiempo. Solidworks. Los autores. 2016................................................................................................ 101 Gráfica 17 Velocidad angular del engranaje planetario. Solidworks. Los autores. 2016 .................................................................................................................... 101. 11.
(12) LISTA DE ANEXOS Anexo A Desarrollo del análisis de posición, Robert Norton, Diseños de Maquinaria. Edición 3ra. 2015. ............................................................................ 122 Anexo B Desarrollo del análisis de posición, Robert Norton, Diseños de Maquinaria. Edición 3ra. 2015. ............................................................................ 125 Anexo C Desarrollo del análisis de velocidad, Robert Norton, Diseños de Maquinaria. Edición 3ra. 2015. ............................................................................ 126 Anexo D Desarrollo del análisis de aceleración, Robert Norton, Diseños de Maquinaria. Edición 3ra. 2015. ............................................................................ 128. 12.
(13) 1. INTRODUCCIÓN. En los estudios mecánicos de aplicaciones eólicas hay multiplicidad de artículos, textos, investigaciones y demás, que proporcionan gran cantidad de información muy completa sobre el funcionamiento, velocidades, rendimientos entre otras características de los álabes que integran los rotores de las maquinas hidráulicas o eólicas, pero esta gran cantidad de información está limitada a un movimiento fijo de los álabes al respecto del rotor los cuales conforman una sola pieza. Ahora bien, cuando el álabe lleva el movimiento rotacional del rotor, pero además de eso se pretende llevar un movimiento independiente que cumpla un determinado patrón para mejorar o cumplir alguna función determinada, es cuando el diseñador comienza a consultar el tema de los rodetes guiados por mecanismos. Sobre estos se sabe de su existencia por su funcionamiento en otra clase de maquinaria y al momento que se quiere incluir en nuevos diseños, los tecnólogos o ingenieros buscan fuentes de los movimientos cinemáticos de estos álabes con movimientos agregados independientes distintos al movimiento del rodete. En la búsqueda de dichas fuentes para comenzar su proceso de diseño es cuando se llega a algunos inconvenientes, ya que los estudios sobre estos álabes guiados por mecanismos se hacen cortos y restringidos, entonces se debe partir de cero sin ayudas guías para determinar relaciones de movimientos y velocidades, el cómo se logra formular una descripción del movimiento de estos mecanismos con modelos matemáticos. El objeto de estudio y trabajo de este proyecto es el mecanismo de orientación angular coordinada e individual de los álabes de un rotor de eje vertical, además se enfoca en el análisis de aspecto descriptivo y predictivo de los mecanismos propuestos, pero no está orientado a estudiar ninguna aplicación específica de ellos, por ejemplo, no se considerarán aspectos de fuerzas, estudios cinéticos o eficiencias porque no se considera la aplicación particular. La utilidad está en el conocimiento que se obtiene este proyecto sobre el mecanismo propiamente dicho.. 13.
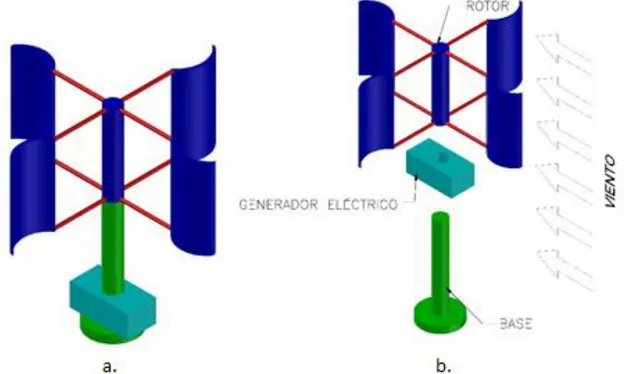
(14) 2. ANTECEDENTES Y JUSTIFICACIÓN.. La importancia en el desarrollo de los análisis cinemáticos de una cantidad determinada de mecanismos eólicos de orientación angular coordinada e individual de los álabes de un rotor, es darle herramientas al diseñador para poder recurrir al uso de estos modelos con muchas más bases y destrezas para determinar distintos parámetros de diseño, ya que facilita la descripción del comportamiento cinemático de estos mecanismos, por ende, un mejor aprovechamiento o aplicación de estos.. Esta noción no solo se limitará a los tres mecanismos planteados, ya que estos sirven de ejemplo y guía para desarrollar el mismo estudio con distintos mecanismos para el enriquecimiento del campo y de esta teorización.. Al momento de realizarse el diseño de la máquina, en este caso las turbinas eólicas de eje vertical previamente se debe determinar la configuración cinemática necesaria para producir el movimiento esperado, pero para optimizar el proceso de diseño se pretende realizar un análisis cinemático, y que quede documentado para que el ingeniero ya parta de unas bases fundamentales para el posterior desarrollo mecánico de una máquina y en este caso un mecanismo de eje vertical.. 3. PLANTEAMIENTO DEL PROBLEMA. 3.1.. DEFINICIÓN DEL PROBLEMA. Las turbinas eólicas de eje vertical son dispositivos de rotación las cuales su eje principal (eje de rotación) se encuentra perpendicular al suelo. Funcionan utilizando el viento como recurso para transformar energía eólica (viento) a energía mecánica (rotor), y luego a energía eléctrica (generador eléctrico). Figura 1. Estas turbinas tienen la ventaja de adaptarse a cualquier dirección de viento y por ello se les llama panémonos (todos los vientos). No precisan dispositivos de orientación; trabajan por la diferencia de coeficiente de arrastre entre las dos. 14.
(15) mitades de la sección expuesta al viento. Esta diferencia de resistencia al viento hace que el rotor sea propenso a girar sobre su eje en un sentido específico.. Figura 1. Representación general en vista isométrico de una turbina eólica en (a) ensamblada y (b) explosionada. Los autores. 2015. Ya que los rotores que necesitan del viento para hacer que su sistema funcione, el correcto movimiento de cada uno de sus elementos hará que el eje principal (punto O Figura 2) gire en dirección del viento. El rotor (Figura 2) es el primer componente del sistema que interactúa con el viento para llevar a cabo el proceso de conversión, convirtiendo la energía cinética del viento en energía mecánica en el eje (O) del rotor1.. 1Diseño. y construcción de un prototipo de turbina eólica de eje vertical para generación a baja potencia, Orduz Berdugo, Oscar; Suárez Pérez, Julián. UIS, Bucaramanga 2011.. 15.
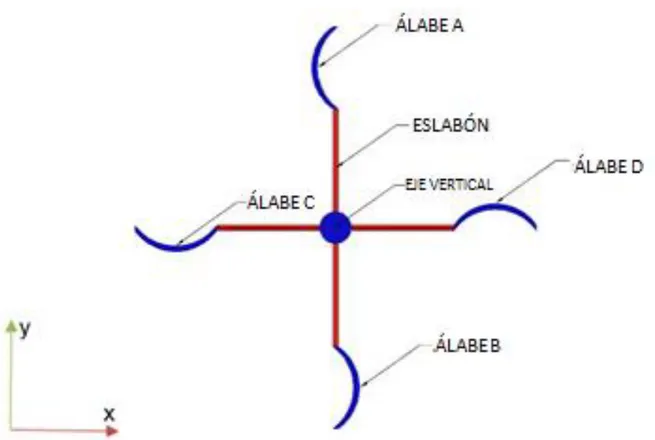
(16) Figura 2. Representación general en vista de planta de un rotor de eje vertical. Los autores, 2015. El rotor por su parte, está conformado por un conjunto de elementos mecánicos que, trabajando articulada y ordenadamente, pueden transformar el movimiento óptimo de la turbina, los cuales se detallan de una forma general: el eje principal (E) y los álabes (A), (B), (C) Y (D) mostrados en la Figura 1. El sistema eólico, para este caso, está compuesto por el viento el cual va en dirección negativa del eje x como se muestra en la Figura 2, y por el rotor. Este último recibe al viento con mayor intensidad en los álabes A y B, pero la interacción del viento con el álabe A provocará un sentido de giro en sentido contrario a las manecillas del reloj y teniendo una velocidad tangencial como se muestra en el esquema de movimiento del rotor (Figura 3), obedeciendo principios de movimiento circular de física.. 16.
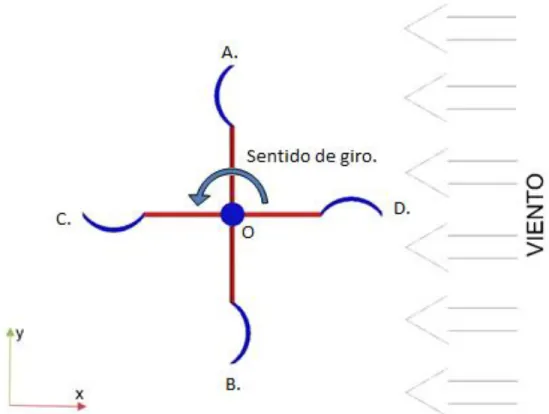
(17) Figura 3. Descripción Gráfica de la acción del viento y su efecto en el rotor de eje vertical. Los autores, 2015. Las ilustraciones mostradas anteriormente representan una de varias configuraciones de turbinas eólicas de eje vertical diseñadas y patentadas en el mundo, y su diseño se basa en la eficiencia energética de las mismas. Por tal razón, el diseñarlas depende de muchos factores de ingeniería, por ejemplo, en la Figura 4 se necesita que el viento golpee con mayor magnitud en los cuadrantes I y II (zona donde está ubicado el álabe A), y con menor magnitud en los cuadrantes III y IV (zona donde está ubicado el álabe B) pero ya se puede concluir por lógica que el viento tendrá la misma magnitud en todos los cuadrantes, así que la posición del álabe B presenta una dificultad de movimiento de giro ya que hay dos direcciones de movimiento que se enfrentan entre sí. (Véase Figura 4). Por ende, se han diseñado varios modelos de turbinas eólicas de eje vertical, los cuales buscan una mejora en el movimiento circular y aprovechar al máximo la energía entregada por el viento, pero hasta el momento, el movimiento articulado de los álabes (que es el punto central del análisis) sólo ha sido diseñado para depender exclusivamente del viento, es decir, siguen un patrón de movimiento relativo en cada uno de los cuadrantes del rotor para conseguir la velocidad angular deseada.. 17.
(18) Figura 4. Representación esquemática del rotor eólico con velocidades tangenciales, nótese que el eje principal se toma como un origen de coordenadas con sus respectivos cuadrantes. Los autores. 2015. Ahora bien, si una opción es permitir que haya una posición perpendicular entre el viento y los álabes en los cuadrantes I y II, y todo lo contrario en los cuadrantes III y IV, entonces se recurre a dar orientación a los álabes del rotor, pero siguiendo un patrón de movimiento para que se pueda resolver este problema, y a pesar de existir información de diferentes configuraciones para lograr este resultado, también hay carencia de información en lo que respecta al comportamiento cinemático de esta clase de elementos mecánicos, además, como se mencionó anteriormente, sólo obedecen su movimiento a la acción del viento sobre ellos, sin embargo, existe la posibilidad de mejorar el rendimiento de estos sistemas consiguiendo un movimiento articulado y coordinado entre cada uno de los álabes para obtener el mismo resultado.. 18.
(19) 4. OBJETIVOS. 4.1. . 4.2.. OBJETIVO GENERAL Realizar el análisis cinemático de tres mecanismos para la orientación angular coordinada e individual de los álabes de un rotor de eje vertical. OBJETIVOS ESPECÍFICOS. . Definir los tres mecanismos para la orientación angular coordinada e individual de los álabes de un rotor de eje vertical.. . Describir los tres mecanismos definidos.. . Realizar el análisis cinemático de cada uno de los tres mecanismos.. . Elaborar los modelos gráficos y simulaciones cinemáticas computacionales de cada uno de los tres mecanismos.. . Elaborar los modelos físicos funcionales de cada uno de los tres mecanismos.. 5. MARCO TEÓRICO CONCEPTUAL. El sentido de la contextualización y con el fin de marcar ayudas que faciliten comprender los temas más amplios que intervienen en el proyecto, se acude a las siguientes definiciones que se necesitan conocer: 5.1. MECANISMOS. 5.1.1. DEFINICIÓN DE MECANISMOS Y MÁQUINAS Un mecanismo es un dispositivo que transforma el movimiento en un patrón deseable, y por lo general desarrolla fuerzas muy bajas y transmite poca potencia. Una máquina, en general, contiene mecanismos que están diseñados para producir y transmitir fuerzas significativas. Algunos ejemplos comunes de 19.
(20) mecanismos pueden ser un sacapuntas, un obturador de cámara fotográfica, un reloj análogo, una silla plegable, una lámpara de escritorio ajustable y un paraguas. Algunos ejemplos de máquinas que poseen movimientos similares a los mecanismos antes mencionados son un procesador de alimentos, la puerta de la bóveda de un banco, la transmisión de un automóvil, una niveladora, un robot y un juego mecánico de un parque de diversiones. No existe una clara línea divisoria entre mecanismos y máquinas. Difieren en su grado y no en su clase. Si las fuerzas o niveles de energía en el dispositivo son significativos, se considerará como una máquina; si no es así, será considerado como un mecanismo. Una definición útil de trabajo de un mecanismo es un sistema deelementos acomodados para transmitir movimiento de una forma predeterminada. Ésta puede ser convertida en una definición de una máquina si se le agregan las palabras y energía después de la palabra movimiento.. 5.1.2. APLICACIONES DE LA CINEMÁTICA Una de las primeras tareas al resolver cualquier problema de diseño de máquinas es determinar la configuración cinemática necesaria para producir los movimientos deseados. En general, los análisis de fuerzas y esfuerzos no pueden ser realizados hasta que los problemas cinemáticos hayan sido resueltos. Esto depende del diseño de dispositivos cinemáticos tales como eslabonamientos, levas y engranes. Virtualmente cualquier máquina o dispositivo que se mueve contiene uno o más elementos cinemáticos, tales como eslabonamientos, levas, engranes, bandas, cadenas. La bicicleta puede ser un ejemplo simple de un sistema cinemático que contiene una transmisión de cadena para generar la multiplicación del par de torsión, y eslabonamientos operados por cables simples para el frenado. Un automóvil contiene muchos más dispositivos cinemáticos. Su sistema de dirección, la suspensión de las llantas y el motor de pistones contienen eslabonamientos; las válvulas del motor son abiertas por levas, y la transmisión tiene muchos engranes. Incluso los limpiaparabrisas son operados por eslabonamientos.. 20.
(21) 5.1.3. TIPOS DE MOVIMIENTO Un cuerpo rígido libre de moverse dentro de un marco de referencia, en el caso general, tendrá movimiento complejo, el cual es una combinación simultánea de rotación y traslación. En el espacio tridimensional, puede haber rotación alrededor de un eje (cualquier eje oblicuo o uno de los tres ejes principales) y también traslación simultanea que se puede resolver en elementos a lo largo de tres ejes. En un plano, o espacio bidimensional, el movimiento complejo se vuelve una combinación de rotación simultánea alrededor de un eje (perpendicular al plano) así como traslación descompuesta en elementos a lo largo de dos ejes en el plano. Para simplificar, se limitara este análisis al caso de sistemas cinemáticos planos (2-D). Para este propósito, se definirán estos términos en movimiento plano como sigue: Rotación pura. El cuerpo posee un punto (centro de rotación) que no tiene movimiento con respecto al marco de referencia “estacionario”. Todos los demás puntos del cuerpo describen arcos alrededor del centro. Una línea de referencia trazada en el cuerpo a través del centro cambia sólo su orientación angular. Traslación pura. Todos los puntos del cuerpo describen trayectorias paralelas (curvilíneas o rectilíneas). Una línea de referencia trazada en el cuerpo cambia su posición lineal pero no su orientación angular. Movimiento complejo. Una combinación simultánea de rotación y traslación. Cualquier línea de referencia trazada en el cuerpo cambiará tanto su posición lineal como su orientación angular. Los puntos en el cuerpo recorrerán trayectorias no paralelas, y habrá, en todo instante, un centro de rotación, el cual cambiará continuamente de ubicación. La traslación y rotación representan movimientos independientes del cuerpo. Cada uno puede presentarse sin el otro. Si se define un sistema de coordenadas 21.
(22) 2-D los términos en x e y representan componentes de movimiento de traslación, y el término θ la componente de rotación.. 5.1.4. GRADO DE LIBERTAD O MOVILIDAD El concepto de grado de libertad (GDL) es fundamental tanto para la síntesis como para el análisis de mecanismos. Es necesario ser capaz de determinar rápidamente el GDL de cualquier conjunto de eslabones o juntas que pueda ser sugerido como solución a un problema. El grado de libertad (también llamado movilidad M) de un sistema se define como: Grado de libertad el número de entradas que se necesita proporcionar para crear una salida predecible. O también: El número de coordenadas independientes requerido para definir su posición.. 5.1.5. ANÁLISIS DE POSICIÓN Una vez que el diseño tentativo de un mecanismo ha sido sintetizado, debe entonces ser analizado. Un objetivo fundamental del análisis cinemático es determinar las aceleraciones de todas las partes móviles del ensamble. Las fuerzas dinámicas son proporcionales a la aceleración, según la segunda ley de Newton. Es necesario conocer las fuerzas dinámicas para calcular los esfuerzos en los componentes. El ingeniero de diseño debe garantizar que el mecanismo o máquina propuesta no fallará en condiciones de operación. Por lo tanto, los esfuerzos en los materiales deben mantenerse por debajo de los niveles permisibles. Para calcular los esfuerzos, es necesario conocer las fuerzas estáticas y dinámicas sobre las partes. Para calcular las fuerzas dinámicas se necesita conocer las aceleraciones, primero se deben localizar las posiciones de todos los eslabones o elementos en el mecanismo por cada incremento del movimiento de entrada, y luego diferenciar las ecuaciones de posición contra el tiempo para hallar las velocidades y luego diferenciar otra vez para obtener expresiones para la aceleración. Por ejemplo, en un simple mecanismo de Grashof de cuatro barras, es probable que se desee calcular las posiciones,. 22.
(23) velocidades y aceleraciones de los eslabones de entrada (acoplador y balancín) quizá para cada dos grados (180 posiciones) de la posición de la manivela de entrada durante una revolución de ésta.. 5.1.6. ANÁLISIS DE VELOCIDAD. Una vez que se analiza la posición, el siguiente paso es determinar las velocidades de todos los eslabones y puntos de interés en el mecanismo. Es necesario conocer todas las velocidades en el mecanismo o máquina, tanto para calcular la energía cinética, como para determinar las aceleraciones de los eslabones que se requieren para calcular la fuerza dinámica. Existen muchos métodos para hallar las velocidades en los mecanismos, aquí se examinaran solo algunos de ellos. Primero se desarrollan métodos gráficos manuales, que a menudo son útiles para comprobar una solución analítica más completa y precisa. También se investigan las propiedades del centro instantáneo de velocidad, que pueden arrojar mucha luz sobre el comportamiento de la velocidad de un mecanismo con muy poco esfuerzo. Por último, se deriva la solución analítica del mecanismo de cuatro barras y del mecanismo manivela-corredera invertido como ejemplos de la solución de lazo vectorial general a problemas de análisis de velocidad. Con estos cálculos, se establecerán algunos índices de mérito para juzgar los diseños expuestos mientras aún están en la mesa de dibujo (o en la computadora).. 5.1.7. ANÁLISIS DE ACELERACIÓN. Una vez que se ha hecho el análisis de la velocidad, el siguiente paso es determinar las aceleraciones de todos los eslabones y puntos de interés en el mecanismo o máquina. Existen muchos métodos para encontrar las aceleraciones en mecanismos. Aquí sólo se examinarán algunos. Primero se desarrolla un método gráfico manual, que a menudo es útil como comprobación de la solución analítica más completa y precisa. Luego se deriva la solución analítica para las aceleraciones en los mecanismos de cuatro barras y de manivela-corredera invertidos como ejemplos de solución con la ecuación de lazo vectorial general a muchos problemas de análisis de la aceleración.. 23.
(24) 5.2. TURBO MÁQUINA Una turbo máquina es una máquina cuyo elemento principal es un rodete (rotor giratorio) a través del cual pasa un fluido de forma continua, cambiando éste su cantidad de movimiento por acción de la máquina. Se da así una transferencia de energía entre la máquina y el fluido a través del momento del rotor sea en sentido máquina-fluido (como en el caso de una bomba hidráulica) o fluido-máquina (como en el caso de una turbina). 5.3. ÁLABE Un álabe es la paleta curva de una turbo máquina o máquina de fluido rotodinámica. Forma parte del rodete y, en su caso, también del difusor o del distribuidor. Los álabes desvían el flujo de corriente, bien para la transformación entre energía cinética y energía de presión por el principio de Bernoulli, o bien para intercambiar cantidad de movimiento del fluido con un momento de fuerza en el eje. 5.4. ROTOR. El rotor más adecuado para producir energía eléctrica es el tipo hélice. El rotor convierte la energía del viento en rotación y, por lo tanto, es el motor. 5.5. RODETE El rodete es un tipo de rotor situado dentro de una tubería o un conducto y encargado de impulsar un fluido. Generalmente se utiliza este término para referirse al elemento móvil de una bomba centrífuga, pero en ocasiones también se utiliza para referirse al elemento móvil de turbinas y ventiladores. Consiste en un disco perpendicular al eje de giro, compuesto por álabes curvados en dirección contraria al movimiento. Según los esfuerzos que deba soportar y la agresividad del medio que deba impulsar, el rodete puede estar hecho de aleación metálica, como por ejemplo acero o aluminio, o de algún polímero, como por ejemplo poliamida.. 24.
(25) 6. DESARROLLO DE LA PROPUESTA.. 6.1. Definición de los tres mecanismos para la orientación angular coordinada e individual de los álabes de un rotor de eje vertical. 6.1.1. Mecanismos considerados. Se recopiló información de distintas fuentes en libros, artículos e internet, principalmente sobre mecanismos presentes en rotores que les dan a sus álabes una orientación angular, coordinada e individual que se asemejen a los estudiados en este proyecto. Teniendo reseñadas y seleccionadas las distintas fuentes, se comienza a descartar información innecesaria y a organizar los datos productivos para la iniciación de los estudios autónomos. Los artículos preseleccionados de manera general fueron:. 6.1.1.1.. Mecanismo 1.. Descripción: Este rotor en esencia no es elaborado por los autores con fines de crear energía eólica, ellos describen el rotor en un video como una forma de crear un movimiento perpetuo y lo llaman “Perpetual Motion Shifted Levers”2. Esta teoría no es propósito de discusión para este artículo, sin embargo, se puede estudiar el mecanismo de orientación de álabes que ayuda a erradicar par contrarios al movimiento, este mecanismo lo que hace es reducir considerablemente la distancia entre el eje central del álabe y el centro del rotor, así el torque contrario al movimiento se reduce notablemente. (Ver Figura 5).. 2. Movimiento perpetuo / Perpetual Motion (Idea); (2015, Enero 27), Pedro Dueñas. Recuperado de: https://www.youtube.com/watch?v=srBbJSzaqOg.. 25.
(26) Figura 5. Movimiento perpetuo / Perpetual Motion (Idea). Pedro Dueñas. 2015.. Figura 6. Perpetual Motion. Shifted Levers. Veproject 1. 2015. Composición: Este rotor se estructura de dos bases descentralizadas de tres brazos cada una, con bielas que unen un brazo con otro de cada base, en las bielas vienen estructurados los álabes de impulso.. 26.
(27) Figura 7. Modificación de la Figura 18 para mostrar los mecanismos. Los autores. 2015.. 27.
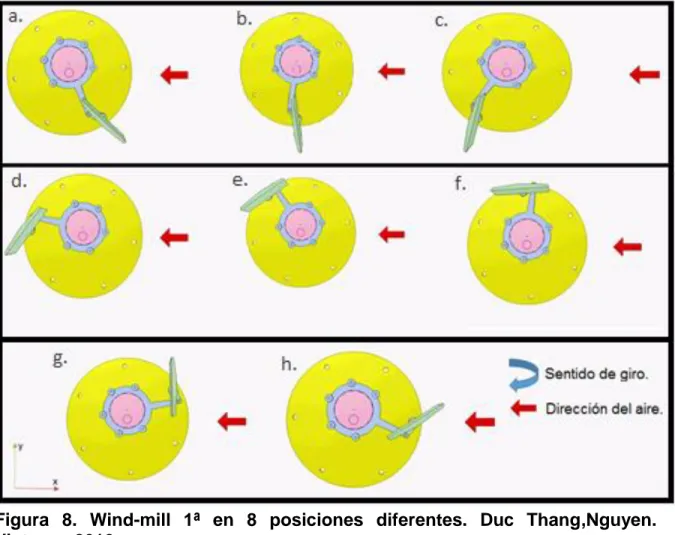
(28) 6.1.1.2.. Mecanismo 2.. Descripción: El rotor con el mecanismo Número dos se encuentra en la red como Wind-mill 1ª 3, el cual presenta una configuración diferente para la creación de energía eólica, este mecanismo cumple la condición de poseer un eje vertical, las imágenes que ilustra la configuración de este son:. Figura 8. Wind-mill 1ª en 8 posiciones diferentes. Duc Thang,Nguyen. Vietnam. 2010.. 3. La simulación de este mecanismo se consigue en esta dirección de página web publicado el 6 Oct. del 2010: https://www.youtube.com/watch?v=7pN7hFZuIUw. 28.
(29) Este mecanismo fue elaborado por el Ingeniero Mecánico Nguyen Duc Thang, Doctor en Ingeniería, 1984, Kosice Universidad de Tecnología de Eslovaquia 4, este Doctor ha publicado en su canal numerosos videos de simulaciones de mecanismos con distintas aplicaciones. El rotor fue simulado enfocándolo principalmente a la producción de energía eólica con rotores de eje vertical, lo que se ajusta completamente al desarrollo de alguna solución para el problema principal. Función: En la Figura 8 se muestra el recorrido de un álabe de los 6 disponibles para este rotor. En la posición a, b y c el álabe entra en mayor contacto posible con las ráfagas de aire al tomar una posición perpendicular al vector dirección del aire. Los campos d, g, y h son posiciones de transición en el mayor y menor contacto con el aire y viceversa, por último, las posiciones e y f el álabe esta de perfil a la dirección del aire y en su forma más aerodinámica, lo que quiere decir que causa la menor resistencia posible al paso del aire, los que amplifica el giro en sentido horario. Composición: Es un enlace de 4 barras que consta de dos manivelas (barra azul, disco amarillo) y una biela (vela verde). La barra azul gira sobre la excéntrica de un eje fijo de color rosa. Esta disposición hace que la vela verde presente su cara a la acción del viento, pero se muestra en filo al volver hacia el viento (la dirección del viento se indica con la flecha roja). El movimiento de salida (rotación en sentido horario) se toma desde el disco amarillo pasando al eje principal, todo esto para la Figura 8. 5. 4. Datos obtenidos en la información de su canal en la página de web con dirección: https://www.youtube.com/user/thang010146/about 5 Información tomada y traducida al español de: https://www.youtube.com/watch?v=7pN7hFZuIUw. 29.
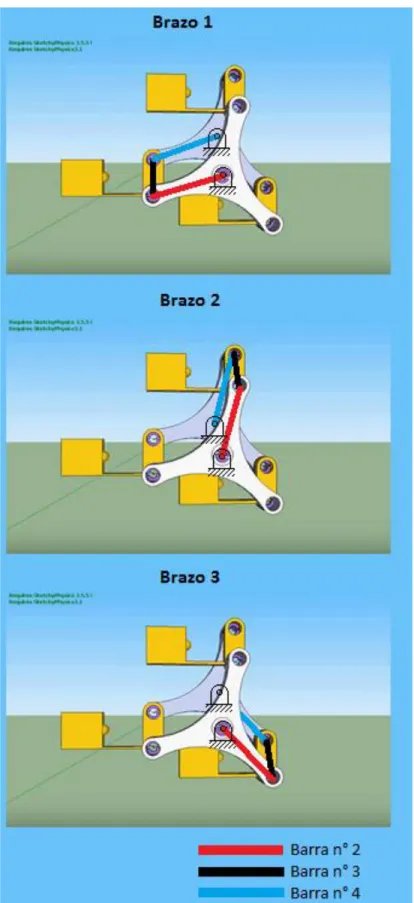
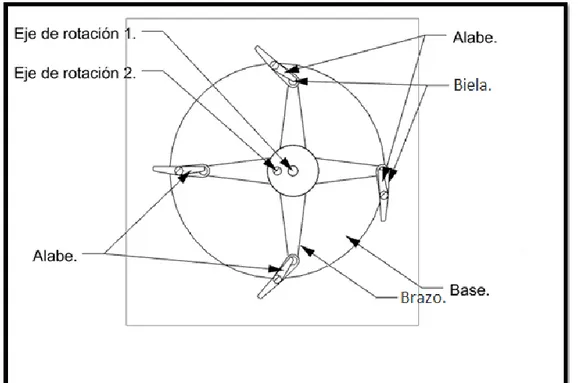
(30) Figura 9. Componentes principales del segundo mecanismo. Los autores. 2015. La Figura 9 indica los componentes principales que hacen parte del rotor. Estos son: La base, que funciona como una manivela, cuatro brazos que también trabajan como manivelas, cuatro álabes que tienen una añadidura la cual sirve como biela. Estos forman un mecanismo de cuatro barras.. Figura 10. Detalle de uno de los brazos para mostrar el mecanismo de cuatro barras implementado en el segundo ejemplo. Los autores. 2015. 30.
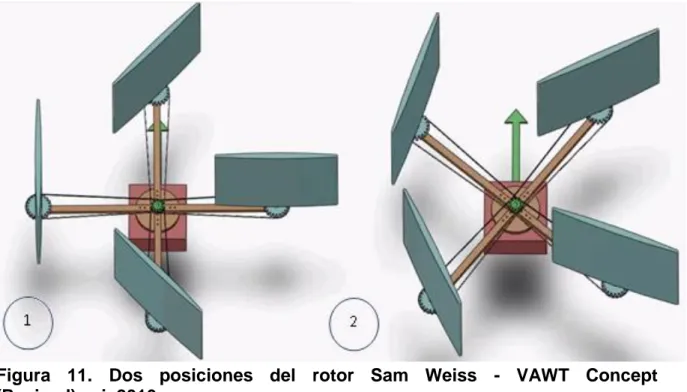
(31) En la Figura 10 se ve el detalle y la especificación del mecanismo de cuatro barras que modela el movimiento rotacional y de traslación del álabe alrededor de sus dos centros.. 6.1.1.3.. Mecanismo 3.. Descripción: El rotor con el mecanismo número 4 es titulado por el autor como Sam Weiss - VAWT Concept (Revised).avi y publicado en la red6, donde el mecanismo genera una restricción cinemática impuesta a los álabes que determina sus ángulos para que cada hoja siempre está generando par positivo.. Figura 11. Dos posiciones del rotor Sam Weiss - VAWT Concept (Revised).avi. 2010. Composición: Este rotor está restringido por un mecanismo que tiene como componente de trasmisión principal las correas evidenciadas en la Figura 11 y un juego de poleas que le dan la exactitud del movimiento.. 6Canal. de youtube "sweissarmyknife"; (2010, Marzo 22) Sam Weiss - VAWT Concept (Revised).avi. Recuperado de https://www.youtube.com/watch?v=vdMGdF9g490. 31.
(32) Figura 12. Sam Weiss. Anonimo. 2010. En la Figura 12 tomada de otro video del mismo autor7, se ve claramente el juego de poleas que le de los movimientos a los álabes, además en la parte media se encuentran unas ruedas dentadas que ayudan al mecanismo a poner el álabe inicial en la posición con mayor contacto con el aire, independiente del sentido del aire.. 6.1.1.4.. Mecanismo 4.. En la red se encuentra con el nombre "Vertical Axis Wind Turbine (VAWT) Type: Pivoted Panel"8 por un usuario anónimo suscrito a una página web9, el nombre de este video que traducido al español significa "turbina de viento con eje vertical (VAWT) Tipo: Panel Pivotado", lleva a recompilar e integrar esta información, ya que se considera como una opción de solución.. Canal de youtube "sweissarmyknife"; (2010, Marzo 22) Sam Weiss – VAW. Recuperado de: https://www.youtube.com/watch?v=Au4-3Gs1O_g. 8 Canal de youtube Sveasun1. (2009, Abril 11) Vertical Axis Wind Turbine (VAWT) Type: Pivoted Panel. Recuperado de https://www.youtube.com/watch?v=Tgq4TC2etag. 9 http//:www.youtube.com 7. 32.
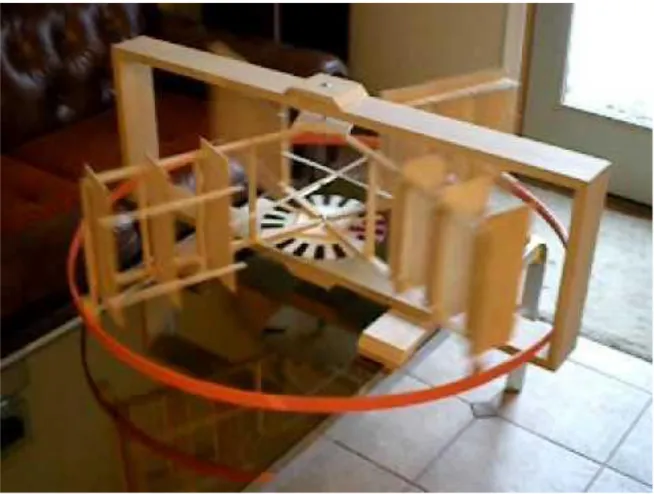
(33) Figura 13. Vertical Axis Wind Turbine (VAWT) Type: Pivoted Panel. Canal Sveasun1. 2009. Esta figura fue tomada del video reseñado10, el cual muestra el funcionamiento de modelos físicos ensamblados y en movimiento por la acción del aire. Función: Este mecanismo en esencia es análogo a los tres anteriores, busca en un extremo ejercer máxima resistencia al paso del aire y en el extremo opuesto de un diámetro lo contrario a la anterior.. 10. Canal de youtube Sveasun1. (2009, Abril 11) Vertical Axis Wind Turbine (VAWT) Type: Pivoted Panel. Recuperado de https://www.youtube.com/watch?v=Tgq4TC2etag.. 33.
(34) Figura 14. Esquema mecanismo 4. Los autores. 2015. Composición: De la Figura 14 se pueden ver tres grandes grupos, el "a." que son los juegos de álabes, 12 para este ejemplo, el grupo "b." que son las piezas de sostenimiento y bases donde se apoyan las demás piezas, y el grupo "c." que es el conjunto de piezas que componen el mecanismo principal, lo componen las manivelas grises y las bielas verdes.. Figura 15. Mecanismo del rotor 4. Los autores. 2015. 34.
(35) El mecanismo está compuesto de siete bielas y dos manivelas como lo muestra la Figura 15, la manivela 5-8 tiene una ranura en el centro pasando por el punto 0 conformando una junta deslizante y rodante con la otra manivela 2-11.. 6.1.1.5.. Mecanismo 5.. Descripción: Este mecanismo desarrollado por el francés Pierre Dieudonné y publicado en la red11, es aplicado en el mismo campo de interés, es decir, la generación de energía eólica a partir de rotores de ejes verticales y álabes orientables por mecanismos. De este estudio se tomó como guía la Figura 16, se da una idea de la configuración básica del rotor, y se ve la orientación de los álabes en distintas posiciones sin mostrar especificaciones de los componentes del mecanismo que registre dichas posiciones.. Figura 16. Wind mill Innovative high-energy potential. Pierre Dieudonné, 2013. Función: Para poder detallar y hacer bosquejos de la configuración del mecanismo, se debe entender el funcionamiento y patrones del posicionamiento angular de los álabes respecto al movimiento circular entorno del eje, para esto se realizó una descripción visual del posicionamiento (Figura 17).. 11Los. videos que simulan este https://www.youtube.com/watch?v=qg7hxaPAjnw.. 35. mecanismo. se. encuentran. en.
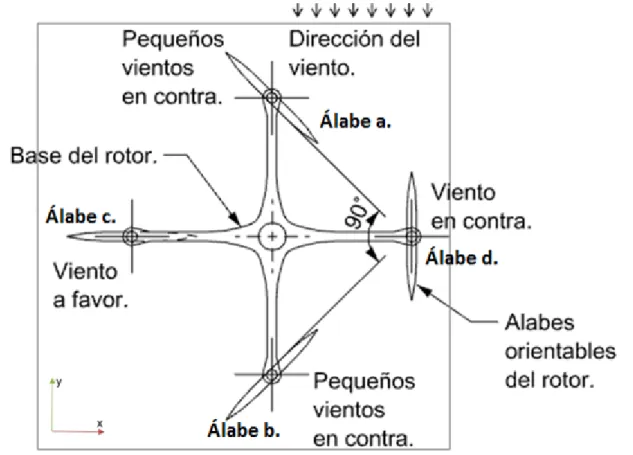
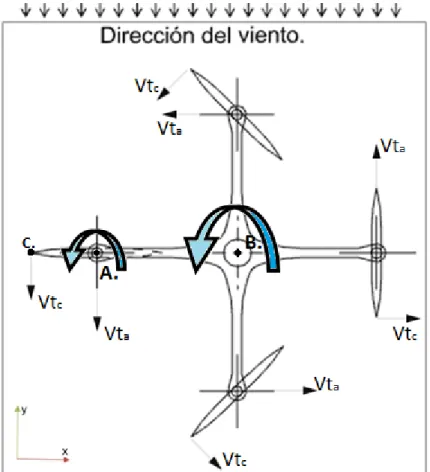
(36) Figura 17. Descripción general de la configuración del mecanismo número 5. Los autores. 2015. En la Figura 17 se identifican dos parejas de álabes opuestos, el álabe "a" con el "b" y álabe "c" con el "d", si se extiende el eje central de cualquiera de estos álabes formara un ángulo recto con la extensión del eje central del álabe opuesto, esto se repite para cualquier posición que tome dicho álabe. Esta disposición de los álabes es muy beneficiosa para la producción de energía eólica y evitar el problema principal de investigación. La posición del álabe "d" en la Figura 17 es la más óptima aerodinámicamente presentando la menor resistencia posible al paso del aire, el caso contrario se presenta en el álabe opuesto "c" donde su posición es contraria a la dirección del viento, estas dos situaciones benefician a la rotación del rotor con un giro positivo alrededor del eje Z, como se muestra en la Figura 18 alrededor del Punto B.. 36.
(37) Figura 18. Visualización de velocidades tangenciales de distintos puntos en el rotor. Los autores. 2015. En la Figura 18, se ve el sentido de rotación del álabe alrededor del Punto A, también el sentido de traslación del álabe alrededor del Punto B, además las velocidades tangenciales del recorrido con Punto C y Punto A, sujetas a los anteriores movimientos de rotación y traslación. Composición: Para restringir el movimiento coordinado de este rotor como se mostró en el punto anterior, se debe diseñar un mecanismo que lleve a cabo los movimientos correlacionados de cada álabe, para esto se pensó un juego de ruedas dentadas como se muestra a continuación.. 37.
(38) Figura 19. Descripción Gráfica del mecanismo para la configuración número 1. Los autores. 2015. A. C. E. G.. Álabe. B. Ruedas dentadas cónicas. Rodamientos. D. Eje trasmisor. Base del rotor. F. Engrane cónico principal. Eje principal de producción energética.. La base del rotor es una de las piezas esenciales del mismo, es donde se sostienen y apoyan las demás piezas. Como se ha visto a lo largo del estudio, estos rotores están condicionado al uso de álabes, 4 para este ejemplo. Otro grupo de piezas son las que limitan el movimiento especial o propias del mecanismo, para este caso en particular son las piezas B, D, y F de la Figura 19. Y por último, son los accesorios complementarios o de ayuda como lo pueden ser los rodamientos, estas son las piezas que componen este mecanismo en un escaneo rápido.. 38.
(39) 6.1.1.6.. Mecanismo 6.. Descripción: El rotor número 6 lo compone un mecanismo de trasmisión por ruedas dentadas para darle orientación a los álabes, estos álabes van a permanecer paralelos entre sí en todo el recorrido además se ajustan según la dirección del aire. Este rotor se encuentra en la red en un video llamado por el autor como: “Keeping direction unchanged during rotation 9b”12, lo que traduce al español “Mantener dirección sin cambios durante la rotación 9b” que afirma la idea de mantener los álabes con la misma dirección a lo largo de la circunferencia del rotor.. Figura 20. Keeping direction unchanged during rotation 9b. Thang, Nguyen Duc. 2014 Composición: Este rotor está compuesto de cuatro álabes, 8 ruedas dentadas, un juego sinfín-corona, y las bases de sostenimiento como se muestra en la Figura 20, los álabes se mantendrán paralelos entre ellos dependiendo de la relación de trasmisión en las ruedas dentadas, y los piñones sinfín-corona son los que dan la dirección deseada.. 12. Nguyen Duc Thang (2014, Feb 5) Keeping direction unchanged during rotation 9b. Recuperado de https://www.youtube.com/watch?v=APdnbZl20S0.. 39.
(40) 6.1.2. Selección de los tres mecanismos a estudiar. Una vez seleccionados los mecanismos que dan posiciones coordinadas angulares e individuales de los alabes de un rotor, en este caso particular 6 de ellos, se debe seleccionar los más funcionales entre estos para el diseño, estudio detallado, creación de prototipos y pruebas. Para este proceso de selección se debe hacer uso de un análisis comparativo de los mecanismos, una matriz de decisión ayuda a identificar los mecanismos más óptimos para adaptarse a las restricciones, forzándolos a considerar varios factores de evaluación de manera sistemática. Dentro de la matriz de decisión cada mecanismo ocupa su propia fila, a las columnas se les asigna criterios de calificación para calificar cuantitativamente cada diseño, estos criterios por ejemplo pueden ser: número de elementos, elementos normalizados o no normalizados, la facilidad para conseguir el mercado, las exigencias de construcción, entre otras más que se considere apropiadas para la selección. Luego a cada criterio se le asigna un factor de ponderación, el cual mide su importancia relativa, los que por lo general son elegidos de modo que sumen a un número conveniente como 1. Posteriormente, el cuerpo de la matriz se llena con números que clasifican cada mecanismo en una escala conveniente, tal como del 1 al 10, en cada uno de los criterios. Luego, las calificaciones se multiplican por los factores de ponderación y los productos sumados de cada mecanismo, todo esto con el fin de descomponer el problema en piezas de pequeños problemas más tratables. Luego se puede tomar una decisión más informada en lo que se refiere al “mejor” mecanismo.. 6.1.2.1.. Criterios de evaluación. Son las categorías en las que los diseños tienen que ser evaluados, cuantificando las ventajas o desventajas que tendrán el mecanismo con respecto a los otros, la suma de estos criterios dará la totalidad de viabilidad del sistema expresado en un número, el cual ayudara para la decisión de tomar los mecanismos a los que se les harán los estudios posteriores. Los criterios serán: a. Número total de elementos (N° Elem.): Es la cantidad total de piezas o componentes que hacen parte del total del modelo del rotor, sin tener en cuenta los elementos de sujeción y unión (tornillos, remaches, tuercas, entre 40.
(41) otras), para esta cantidad de piezas se tendrá en cuenta la economía y facilidad para elaborar y repetición de las mismas. b. Número de elementos normalizados (N° Elem. Norm.): La cantidad de elementos normalizados es importante ya que no se tiene que acudir a una fabricación, debido a que se puede tener acceso a ellos en la industria Colombiana cotidiana y en algunos casos la especializada. c. Número de elementos de geometría compleja (N° Elem. Comp.): Aquí entran las piezas particulares o especiales, con curvas o formas en el espacio o con procesos de fabricación de difícil acceso que hacen que la fabricación de los mecanismos se dificulte, esto es muy importante en la selección. d. Número de elementos de geometría compleja normalizados(N° Elem. Comp. Norm): Son un grupo pequeño que se hace exento del criterio número 2, son piezas que son normalizadas y tienen reglas que los rigen, pero a la hora de adquirirlos requiere una búsqueda tediosa o especializada en industrias de difícil acceso o poco reconocimiento.. e. Facilidad de fabricación de los elementos (Fab. Elem.) Es un criterio en el cual se tiene en cuenta la factibilidad de los elementos y procesos defabricación de piezas que estén a nuestro alcance y se dará una menor calificación a los procesos de difícil acceso, de mayor costo, o de fabricación compleja. Dándole 10 al mecanismo más complejo y 1 al más sencillo de la fabricación de elementos.. f.. Nivel de complejidad de los mecanismos (Niv. Comp.): En este criterio se evaluará el conjunto de las piezas revisadas, analizando si se tiene un ensamble de piezas muy complejo, con ajustes y tolerancias muy exactos que necesitan hacer uso de maquinaria con mucha exactitud y precisión, las construcciones con menor demanda sin hace uso de muchas tolerancias de orientación, de situación, de forma o alabeo. Dándole 10 a mecanismos de suma complejidad y 1 a los más sencillos.. g. Utilidad eólica. : Aquí se estimó el grado de adaptación del posicionamiento que el mecanismo le da a los alabes para el aprovechamiento de las velocidades de aire para crear energía eólica.. 41.
(42) Tabla 1. Factores de ponderación para cada criterio. N° N° Elem. Elem. Norm. Factor de 0,1 ponderación. 6.1.2.2.. 0,1. N° Elem. Comp.. N° Elem. Fab. Niv. Utilidad Comp. Norm. Elem. Comp. eólica. 0,15. 0,13. 0,16. 0,18. 0,2. RANGO. 1,02. Matriz de decisión de todos los mecanismos.. La siguiente es una Tabla donde se registra un estimado de cada Mecanismo según los criterios de evaluación y se multiplica por el factor de ponderación para luego sumar todos los resultados por mecanismo y seleccionar los tres mecanismos con mejores resultados para adelantar estudios con estos. Tabla 2. Tabla de decisión de los tres mecanismos más óptimos.. 42.
(43) 6.2.. Análisis cinemático de cada uno de los mecanismos.. 6.2.1. MECANISMO N° 1. Después del proceso de selección se retoma el primero de los escogidos, que es el mecanismo N° 1 tomado de la red13, descrito en la unidad 7.1.1.1 Mecanismo 1, para desarrollar su estudio detallado.. Figura 21. Repost Figura 5 de la Unidad 7.1.1.1 A este mecanismo se le realizaron modificaciones en los álabes (componente amarillo) para una mejor representación de su finalidad y queriendo mostrar funcionalidad aerodinámica en el ámbito eólico donde se pretende que sea aplicado.. Figura 22. Modificaciones en álabes del mecanismo tomado en la red. Los autores. 2016. Canal de youtube "sweissarmyknife"; (2010, Marzo 22) Sam Weiss – VAW. Recuperado de: https://www.youtube.com/watch?v=Au4-3Gs1O_g. 13. 43.
(44) Este mecanismo se compone de tres sub-mecanismos iguales, enlazados y conectados entre ellos por los dos puntos fijos que conforman el eslabón de bancada, como el mostrado en la Figura 22 enlazados entre ellos para lograr formar el mecanismo de la Figura 1.3.. Figura 23. Representación de los tres sub-mecanismos que intervienen. Los autores. 2016. En la Figura 23 se diferencian con un color cada mecanismo que interviene en la construcción de este conjunto, identificando la repetición del mecanismo se puede entrar en estudio del mecanismo en específico ya que los otros dos van a seguir los mismos movimientos de este.. Figura 24 Detalle de mecanismo base. Los autores. 2016. 44.
(45) Se puede observar claramente el mecanismo fundamental que al repetirse el número de álabes dispuestos conforma el conjunto estudiado, este mecanismo se puede descomponer en eslabones fundamentales.. Figura 25. Detalle de los eslabones que conforman el mecanismo base. Los autores. 2016. Este mecanismo es el de los más comunes en la teorización de cadenas cinemáticas, es conocido como mecanismo paralelogramo de cuatro barras, el texto “Diseño de Maquinaria” lo describe de la siguiente manera: “El mecanismo con forma de paralelogramo es muy útil, ya que duplica con exactitud el movimiento rotatorio de la manivela impulsora en la impulsora. El acoplador del eslabonamiento de paralelogramo está en traslación curvilínea, y permanece en el mismo ángulo mientras que todos los puntos en ella describen rutas circulares idénticas. A menudo y como en este caso, se utiliza para este movimiento paralelo.”14. 14. Robert L. Norton; (2005); DISEÑO DE MAQUINARIA, Síntesis y análisis de máquinas y mecanismos, Tercera Edición. Página 42.. 45.
(46) Figura 26. Esquema del eslabón A (biela) con el álabe. Los autores. 2016. El conjunto general se compone de 4 eslabones; los tres subconjuntos comparten el mismo eslabón de bancada. Los elabones 1 por ser un mecanismo en forma de paralelogramo tienen la misma longitud que los eslabones 3 y por lo tanto para completar la Figura geometrica los eslabones 2 necesariamente deben tener las misma longitud que hay entre los dos puntos de bancada. El primer aspecto de diseño que se debe tomar para este mecanismo es el espacio con que se cuenta para hacer el montaje, el primer ítem es calcular el diámetro máximo de cobertura del mecanismo, o espacio necesario para cubrir todas las posiciones que pueda optener el mecanismo ya montado.. 46.
(47) Figura 27. Diámetro total de uso como factor de diseño. Los autores. 2016.. El diámetro de esta circunferencia marcada por el extremo más lejano de álabe, mostrada en la Figura 27, es la que se debe ajustar a la necesidad de diseño y de ahí se puede arrancar a calcular las longitudes necesarias.. Figura 28. Detalle composición de un radio. Los autores. 2016. Como se muestra en la Figura 28, un radio de la circunferencia total se compone de la sumatoria de la longitud del eslabón A más la medida del brazo que sostiene el álabe donde impactara la corriente del aire, la medida del eslabón A tiene directa influencia en la circunferencia que demarcara el mecanismo cuando la bancada es fija. 47.
(48) Figura 29. Circunferencia trazada por los álabes. Los autores. 2016. Para la decisión de la medida del Eslabón “a” que marcará el diámetro de la circunferencia trazada por el movimiento de los álabes del rotor, ya que dicha circunferencia tiene como radio la misma medida de tal eslabón. Además de esto, el centro de esta circunferencia está a una distancia del punto fijo de la bancada exactamente igual al largo del brazo.. Figura 30. Resultado de la longitud del brazo. Los autores. 2016.. 48.
(49) Teniendo clara la geometría específica del mecanismo en general se procederá a analizar cinemática desarrollando la teoría para el caso en específico.. 6.2.1.1.. Grados de libertad (Movilidad). ¨Para determinar el GDL global de cualquier mecanismo, se debe considerar el número de eslabones así como las juntas y las interacciones entre ellos. El GDL de cualquier ensamble de eslabones se puede pronosticar con una investigación de la Ecuación de Gruebler. El valor de J en la ecuación de Gruebler debe reflejar el valor de todas las juntas en el mecanismo. Esto es, las semi juntas cuentan como ½ porque sólo eliminan un GDL. Esto es menos confuso si se utiliza la modificación de Kutzbach de la ecuación de Gruebler en esta forma:”15. 𝑀 = 3(𝐿 − 1) − 2𝐽1 − 𝐽2. Donde:. M = grado de libertad o movilidad. L = número de eslabones. J₁ = número de juntas de 1 GDL (completas). J₂ = número de juntas de 2 GDL (Semi).. L (número de eslabones): Para este mecanismo y como es mostrado en la Figura 25 el número total de eslabones lo conforman 2 manivelas (Eslabón 2 y 4), un álabe que también cumple la función de biela (Eslabón 3) y la bancada que es conformada por las dos juntas de anclaje (Eslabón 1, entre O2 y O4), para un total de 4 eslabones.. J₁ (número de juntas de 1 GDL, completas): Las 4 Juntas que intervienen en este mecanismo son juntas rotatorias completas.. J₂ (número de juntas de 2 GDL, Semi-juntas): Este mecanismo no posee ninguna Semi junta que aporte dos grados de libertad al mecanismo.. 15. Robert L. Norton; (2005); DISEÑO DE MAQUINARIA, Síntesis y análisis de máquinas y mecanismos, Tercera Edición. Página 27.. 49.
(50) El resultado que no debe variar al arrojado por la ecuación de Gruebler , debido que solo es una variación para no tener problemas con la suma de distintos tipos de Juntas además que el mecanismo solo intervienen Juntas completas que no marcan gran diferencia en los GDL. 𝑀 = 3(𝐿 − 1) − 2 ∗ J1 − J2 𝑀 = 3(4 − 1) − 2 ∗ 4 − 0 𝑀 = 9−8−0 𝑀=1 Con esto se comprueba que Kutzbasch solo planteo un pequeña modificación a la ecuación de Gruebler que en términos generales arrojan el mismo resultado.. 6.2.1.2.. La condición de Grashof.. “La condición de Grashof es una relación muy simple que predice el comportamiento de rotación o rotabilidad de las inversiones de un eslabonamiento de cuatro barras basado solo en la longitud de los eslabones.. Sea: S = Longitud del eslabón más corto. L = Longitud del eslabón más largo. P = Longitud de un eslabón restante. Q = Longitud de otro eslabón restante.. En el caso de la Clase III, S + L = P + Q: Conocida como caso especial de Grashof y también como cadena cinemática clase III, todas las inversiones serán dobles-manivelas o manivela-balancín, pero tendrán “puntos de cambio” dos veces por revolución de la manivela de entrada cuando todos los eslabones se vuelven colineales. En estos puntos de cambio el comportamiento de salida se volverá indeterminado. Hunt las denomina “configuraciones inciertas”. En estas posiciones colineales el comportamiento del eslabonamiento es entonces impredecible ya que puede asumir cualquiera de dos configuraciones. Su movimiento debe ser limitado para evitar que alcance los puntos de cambio o utilizar un eslabón adicional fuera de fase para garantizar un “arrastre” de los puntos de cambio.. 50.
(51) El eslabonamiento de paralelogramo es muy útil, ya que duplica con exactitud el movimiento rotatorio de la manivela impulsora en la impulsada. Un uso común es acoplar los dos balancines de salida de limpiaparabrisas a todo lo ancho del parabrisas de un automóvil. El acoplador del eslabonamiento de paralelogramo está en traslación curvilínea, y permanece en el mismo ángulo mientras que todos los puntos en ella describen rutas circulares idénticas. A menudo, se utiliza para este movimiento paralelo, como en la puerta trasera de un camión y en robots industriales.”16. Figura 31. Modelo pictórico con modelo cinemático (diagrama de cuerpo libre). Por ser un mecanismo que posee una forma de paralelogramo, la geometría euclidiana indica que los ángulos opuestos y lados opuestos son congruentes (iguales), los ángulos continuos son suplementarios (Suman 180°)17 Por lo anterior refiriéndose a la Figura 31 se puede asegurar que:. Longitud Eslabón 2 = Longitud Eslabón 4 Longitud Eslabón 3 = Longitud Eslabón 1 o de bancada.. 16. (1) (2). Robert L. Norton; (2005); DISEÑO DE MAQUINARIA, Síntesis y análisis de máquinas y mecanismos, Tercera Edición. Página 42. 17 Información tomada de la página web: http://aprendeenlinea.udea.edu.co/lms/moodle/mod/url/view.php?id=138018. 51.
Figure
+7
Documento similar