INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA SECCIÓN DE ESTUDIOS DE POSTGRADO E INVESTIGACIÓN
(S.E.P.I.)
Estudio de la recepción de la señal digital con
presencia de ruido blanco y ruido de impulso asimétrico
T E S I S
Que para obtener el grado de:
MAESTRO EN CIENCIAS EN
INGENIERÍA DE TELECOMUNICACIONES
P R E S E N T A:
Ing. Domínguez Ramírez Arturo
Director de Tesis: Dr. Vladimir Kazakov Erasova
Í N D I C E
RELACIÓN DE GRÁFICAS Y TABLAS ... RESUMEN ... ABSTRACT ... ANTECEDENTES ... JUSTIFICACIÓN ... OBJETIVOS ...
CAPÍTULO 1 PROCESOS ALEATORIOS Y MODELOS PROBABILÍSTICOS DEL RUIDO BLANCO Y DEL RUIDO DE IMPULSO
1.1 INTRODUCCIÓN ... 1.2 SEÑALES ALEATORIAS Y PROCESOS ESTOCÁSTICOS ...
1.3 ENFOQUES PROBABILÍSTICOS PARA EL MEJORAMIENTO
DE LOS SISTEMAS ... 1.4 PROCESOS GAUSSIANOS ... 1.5 RUIDO BLANCO ... 1.6 PROCESO BINARIO MARKOVIANO (PBM) ... 1.7 FILTRO ACOPLADO Y FILTRO RC ... 1.8 FDP EN UN FILTRO RC ...
CAPÍTULO 2 LA RECEPCIÓN DE LA SEÑAL DIGITAL CON RUIDO DE IMPULSO ASIMÉTRICO
2.1 INFLUENCIA DEL RUIDO DE IMPULSO
EN LA ENTRADA DE UN RECEPTOR ... 2.2 FDPS DEL PROCESO DE SALIDA DEL FILTRO RC
INFLUENCIADO POR EL PBM ASIMÉTRICO ... 2.2.1 Representación gráfica de fdps del PBM ...
i v vii
ix xiii xiv
1
1 2 3
4 5 6 9 14
15
15
2.3 PROBABILIDAD DE ERROR PARA EL RUIDO
DE IMPULSO ASIMÉTRICO ... 2.4 CALCULO ANALÍTICO DEL VALOR ÓPTIMO DE UMBRAL h ...
2.5 RESULTADOS GRÁFICOS DE LA PROBABILIDAD DE ERROR DEL
RUIDO DE IMPULSO ASIMÉTRICO ...
CAPÍTULO 3 LA RECEPCIÓN DE LA SEÑAL DIGITAL CON RUIDO BLANCO Y RUIDO DE IMPULSO ASIMÉTRICO
3.1 FDPS DEL PROCESO DE SALIDA DEL FILTRO RC INFLUENCIADO POR EL RUIDO BLANCO Y EL RUIDO DE IMPULSO ASIMÉTRICO ...
3.1.1 Fdps del proceso de salida del filtro RC con ausencia de señal ... 3.1.2 Fdps del proceso de salida del filtro RC con presencia de señal ...
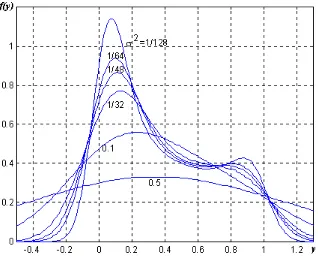
3.2 COMPORTAMIENTO DE LA FDP EN FUNCION DE LOS PARÁMETROS
DE ENTRADA ... 3.2.1 Comportamiento de la fdp en función del ancho de banda ... 3.2.2 Comportamiento de la fdp en función de la varianza ... 3.3 PROBABILIDAD DE ERROR CON RUIDO BLANCO GAUSSIANO ... 3.4 PROBABILIDAD DE ERROR CON RUIDO BLANCO Y RUIDO DE
IMPULSO ASIMÉTRICO ... 3.4.1 Probabilidad de error en función de la amplitud de la señal ... 3.4.2 Probabilidad de error en función del ancho de banda ... 3.4.3 Probabilidad de error en función de las probabilidades a priori ... 3.5 COMPARACIÓN DEL UMBRAL ÓPTIMO PARA EL PBM
Y EL PBM CON RUIDO BLANCO ... CONCLUSIONES ... RECOMENDACIONES Y SUGERENCIAS PARA TRABAJOS FUTUROS ... ANEXOS ... ANEXO A Solución de la ecuación cúbica por el método de Cardano y Vieta ... ANEXO B Solución de la ecuación cuártica por el método de Ferrari ... ANEXO C Programas ... ANEXO D Artículos Publicados ... BIBLIOGRAFÍA ...
22 24
31
41
42
42 43
51 51 55
58
60 65 67 68
Relación de Gráficas y Tablas
Figura 1.1 Comportamiento de un proceso aleatorio. 3
Figura 1.2 Proceso Binario Markoviano. 7
Figura 1.3 Recepción de la señal rectangular con filtro acoplado. 10
Figura 1.4 Recepción de la señal rectangular con filtro RC. 11
Figura 1.5 El efecto de variar el producto tiempo-ancho de banda sobre la salida de la relación señal a ruido para un filtro RC.
13 Figura 1.6 Esquema del receptor influenciado por el ruido blanco Gaussiano y la
señal binaria. 14
Figura 2.1 Esquema del receptor con señales de entrada z
( )
t y s( )
t . 16Figura 2.2 Función de densidad de probabilidad (fdp) λ1 =1;λ2 =2;α =1. 18 Figura 2.3 Función de densidad de probabilidad λ1 =2;λ2 =4;α =1. 18 Figura 2.4 Función de densidad de probabilidad λ1 =2.5;λ2 =3;α =1. 18 Figura 2.5 Función de densidad de probabilidad λ1 =2;λ2 =3;α =1. 18 Figura 2.6 Función de densidad de probabilidad λ1 =3;λ2 =2;α =1. 19 Figura 2.7 Función de densidad de probabilidad λ1 =4;λ2 =2;α =1. 19 Figura 2.8 Función de densidad de probabilidad λ1 =3;λ2 =1;α =1. 19 Figura 2.9 Función de densidad de probabilidad λ1 =1;λ2 =3;α =1. 19 Figura 2.10 Función de densidad de probabilidad λ1 =1;λ2 =4;α =1. 20 Figura 2.11 Función de densidad de probabilidad λ1 =3;λ2 =4;α =1. 20 Figura 2.12 Función de densidad de probabilidad λ1 =3;λ2 =5;α =1. 20 Figura 2.13 Función de densidad de probabilidad λ1 =5;λ2 =2;α =1. 20 Figura 2.14 Función de densidad de probabilidad λ1 =2;λ2 =1;α =1. 21 Figura 2.15 Función de densidad de probabilidad λ1 =1;λ2 =1;α =1. 21 Figura 2.16 Función de densidad de probabilidad λ1 =1.5;λ2 =1.5;α =1. 21 Figura 2.17 Función de densidad de probabilidad λ1 =3;λ2 =3;α =1. 21 Figura 2.18 Áreas de probabilidad de error Pe0 y Pe1;λ1 =2;λ2 =4;α=1;As =0.3. 22 Figura 2.19 Probabilidad de error del PBM cambiando la probabilidad a priori
2 . 0 ; 1 ; 1 ; 2 2
1 = λ = α = As =
λ .
31
Figura 2.20 Probabilidad de error del PBM cambiando la probabilidad a priori 3 . 0 ; 1 ; 1 ; 2 2
1 = λ = α = As =
λ .
32
Figura 2.21 Probabilidad de error del PBM cambiando la probabilidad a priori 1 . 0 ; 1 ; 1 ; 3 2
1 = λ = α = As =
λ .
32
Figura 2.22 Probabilidad de error del PBM cambiando la probabilidad a priori 3 . 0 ; 1 ; 1 ; 3 2
1 = λ = α = As =
λ .
33
Figura 2.23 Probabilidad de error del PBM cambiando la probabilidad a priori 5 . 0 ; 1 ; 2 ; 3 2
1 = λ = α = As =
λ .
Figura 2.24 Probabilidad de error del PBM cambiando la probabilidad a priori 5 . 0 ; 1 ; 2 ; 3 2
1 = λ = α = As =
λ .
34
Figura 2.25 Probabilidad de error del PBM cambiando la probabilidad a priori 8 . 0 ; 1 ; 2 ; 3 2
1 = λ = α = As =
λ .
34
Figura 2.26 Probabilidad de error del PBM cambiando la probabilidad a priori 8 . 0 ; 1 ; 2 ; 3 2
1 = λ = α = As =
λ .
35
Figura 2.27 Probabilidad de error del PBM cambiando la probabilidad a priori 5 . 0 ; 1 ; 4 ; 2 2
1 = λ = α = As =
λ .
35
Figura 2.28 Probabilidad de error del PBM cambiando la probabilidad a priori 5 . 0 ; 1 ; 4 ; 2 2
1 = λ = α = As =
λ .
36
Figura 2.29 Probabilidad de error del PBM cambiando la probabilidad a priori 6 . 0 ; 1 ; 4 ; 2 2
1 = λ = α = As =
λ .
36
Figura 2.30 Probabilidad de error del PBM cambiando la probabilidad a priori 6 . 0 ; 1 ; 4 ; 2 2
1 = λ = α = As =
λ .
37
Figura 2.31 Probabilidad de error del PBM cambiando la probabilidad a priori 3 . 0 ; 1 ; 4 ; 2 2
1 = λ = α = As =
λ .
37
Figura 2.32 Probabilidad de error del PBM cambiando la probabilidad a priori 3 . 0 ; 1 ; 4 ; 2 2
1 = λ = α = As =
λ .
38
Figura 3.1 Esquema del receptor influenciado por el ruido blanco, el ruido de impulso y la señal binaria.
41
Figura 3.2 Fdps con n
( )
t +PBM λ1=2;λ2 =4;α =5;σ2 =1/128;As =0.3. 43Figura 3.3 Fdps con n
( )
t +PBM 5.3 5 3 5 3 8 . 0 ; 128 / 1 ; 5 ; 4 ; 2 2 2
1 = λ = α = σ = As =
λ 44
Figura 3.4 Fdps con n
( )
t +PBM λ1 =2;λ2 =4;α =1;σ2 =1/128;As =1. 44 Figura 3.5 Fdps con n( )
t +PBM λ1 =2;λ2 =4;α =5;σ2 =1/128;As =0.8. 46 Figura 3.6 Fdps con n( )
t +PBM λ1 =2;λ2 =3;α =5;σ2 =1/128;As =0. . 46 Figura 3.7 Fdps con n( )
t +PBM λ1 =2;λ2 =3;α =5;σ2 =1/128;As =0. . 47 Figura 3.8 Fdps con n( )
t +PBM λ1 =2;λ2 =3;α =5;σ2 =1/128;As =0.8. 47 Figura 3.9 Fdps con n( )
t +PBM λ1 =3;λ2 =2;α =5;σ2 =1/128;As =0. . 48 Figura 3.10 Fdps con n( )
t +PBM λ1 =3;λ2 =2;α =5;σ2 =1/128;As =0. . 48 Figura 3.11 Fdps con n( )
t +PBM λ1 =3;λ2 =2;α =5;σ2 =1/128;As =0.8. 49 Figura 3.12 Fdps con n( )
t +PBM λ1 =3;λ2 =1;α =5;σ2 =1/128;As =0. . 49 Figura 3.13 Fdps con n( )
t +PBM λ1 =3;λ2 =1;α =5;σ2 =1/128;As =0. . 50 Figura 3.14 Fdps con n( )
t +PBM λ1 =2;λ2 =1;α =5;σ2 =1/128;As =0.3. 50 Figura 3.15 Fdps en función del ancho de banda 2; 4; 2 1/128.2
1= λ = σ =
λ 52
Figura 3.16 Fdps en función del ancho de banda 2; 3; 2 1/128.
2
1= λ = σ =
λ 52
Figura 3.17 Fdps en función del ancho de banda 3; 2; 2 1/128.
2
1 = λ = σ =
λ 53
Figura 3.18 Fdps en función del ancho de banda 3; 1; 2 1/128.
2
1 = λ = σ =
Figura 3.19 Fdps en función del ancho de banda 2; 1; 2 1/128.
2
1= λ = σ =
λ 54
Figura 3.20 Fdps en función del ancho de banda 1; 3; 2 1/128.
2
1= λ = σ =
λ 54
Figura 3.21 Fdps en función de la varianza λ1 =2;λ2 =4;α =5. 55 Figura 3.22 Fdps en función de la varianza λ1 =3;λ2 =2;α =5 56 Figura 3.23 Fdps en función de la varianza λ1 =3;λ2 =1;α =5. 56 Figura 3.24 Fdps en función de la varianza λ1 =2;λ2 =1;α =5. 57 Figura 3.25 Fdps en función de la varianza λ1 =1;λ2 =3;α =5. 57
Figura 3.26 Fdps de salida de tipo Gaussiana. 58
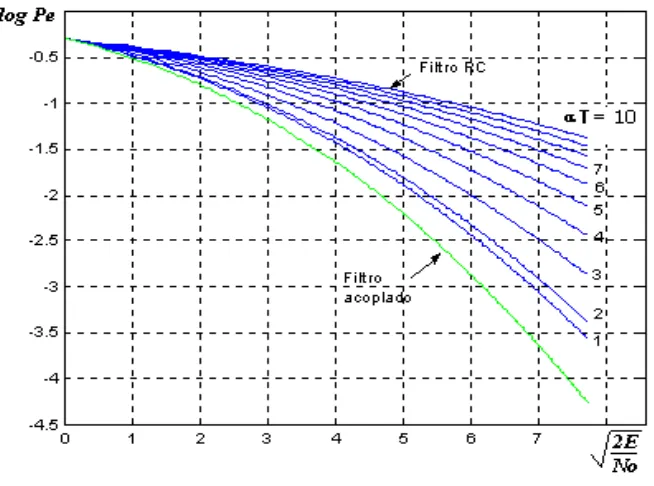
Figura 3.27 Comparación de la probabilidad de error del filtro RC y filtro acoplado. 59 Figura 3.28 Fdps 3; 1; 1; 2 1/128; 0.4; 1 0.5.
2
1 = λ = α = σ = As = P =
λ 61
Figura 3.29 Probabilidad de error 3; 1; 1; 2 1/128; 0.4; 1 0.5.
2
1= λ = α = σ = As = P =
λ 61
Figura 3.30 Fdps . 2; 4; 4; 2 1/128; 0.6; 1 0.5
2
1 = λ = α = σ = As = P =
λ 62
Figura 3.31 Probabilidad de error 2; 4; 4; 2 1/128; 0.6; 1 0.5.
2
1 = λ = α = σ = As = P =
λ 62
Figura 3.32 Fdps . 2; 3; 5; 2 1/128; 0.3; 1 0.5
2
1 = λ = α = σ = As = P =
λ 63
Figura 3.33 Probabilidad de error 2; 3; 5; 2 1/128; 0.3; 1 0.5.
2
1 = λ = α = σ = As = P =
λ 63
Figura 3.34 Fdps 3; 2; 5; 2 1/128; 0.3; 1 0.5.
2
1 = λ = α = σ = As = P =
λ 64
Figura 3.35 Probabilidad de error 3; 2; 5; 2 1/128; 0.3; 1 0.5.
2
1 = λ = α = σ = As = P =
λ 64
Figura 3.36 Probabilidad de error en función de la amplitud . 5 . 0 ; 128 / 1 ; 1 ; 4 ;
2 2 1
2
1 = λ = α = σ = P =
λ 65
Figura 3.37 Probabilidad de error en función de la amplitud 5 . 0 ; 128 / 1 ; 5 ; 3 ;
2 2 1
2
1 = λ = α = σ = P =
λ .
66
Figura 3.38 Probabilidad de error en función de la amplitud 5 . 0 ; 128 / 1 ; 1 ; 1 ;
3 2 1
2
1 = λ = α = σ = P =
λ .
66
Figura 3.39 Probabilidad de error en función de la amplitud 5 . 0 ; 128 / 1 ; 5 ; 2 ;
3 2 1
2
1 = λ = α = σ = P =
λ .
67
Figura 3.40 Probabilidad de error en función del ancho de banda . 5 . 0 ; 8 . 0 ; 128 / 1 ; 4 ;
2 2 1
2
1 = λ = σ = As = P =
λ 68
Figura 3.41 Probabilidad de error en función de las probabilidades a priori . 5 . 0 ; 128 / 1 ; 1 ; 1 ; 3 2 2
1 = λ = α = σ = As =
λ 69
Figura 3.42 Probabilidad de error en función de las probabilidades a priori . 8 . 0 ; 128 / 1 ; 1 ; 4 ; 2 2 2
1 = λ = α = σ = As =
λ
69
Figura 3.43 Umbral óptimo para el PBM y el PBM con ruido blanco . 5 . 0 ; 8 . 0 ; 128 / 1 ; 2 ; 4 ;
2 2 1
2
1 = λ = α = σ = As = P =
λ
70
Figura 3.44 Umbral óptimo para el PBM y el PBM con ruido blanco
2 1/128; 0.8; 0.5.
; 1 ; 1 ;
3 2 1
1 = λ = α = σ = As = P =
λ
2
1 = λ = α = σ = As = P =
λ
71
Figura 3.45 Umbral óptimo para el PBM y el PBM con ruido blanco
2 1/128; 0.5; 0.5
; 1 ; 4 ;
2 1 .
Figura 3.46 Probabilidad de error en función de la amplitud As 5 . 0 ; 128 / 1 ;
1 2 = 1 =
= σ P
α .
73
Figura 3.47 Probabilidad de error mínima para el filtro RC y el filtro acoplado 5 . 0 ; 1 ; 128 / 1 ;
1 2 = = 1 =
= σ T P
α .
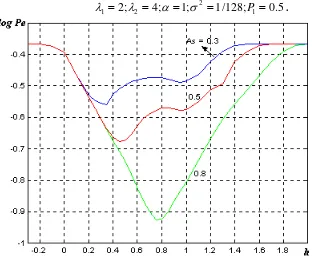
74
Figura 3.48 Pe considerando el ruido blanco y la suma del ruido blanco y del ruido de impulso =1; 2 =1/128; 1 =0.5.
P
T σ
α
75
Figura 3.49 Comparación de las curvas de la Pe para valores de h1y h óptima
5 . 0 ; 128 / 1 ; 1 ; 4 ;
2 2 1
2
1 = λ = αT = σ = P =
λ .
76
Figura 3.50 Comparación de las curvas de la Pe para valores de h1y h óptima
5 . 0 ; 128 / 1 ; 1 ; 4 ;
1 2 1
2
1 = λ = αT = σ = P =
λ .
76
Figura 3.51 Comparación de las curvas de la Pe para valores de h1y h óptima
5 . 0 ; 128 / 1 ; 1 ; 3 ;
2 2 1
2
1 = λ = αT = σ = P =
λ .
77
Figura 3.52 Comparación de las curvas de la Pe para valores de h óptima 5 . 0 ; 128 / 1 ; 4 ;
2 2 1
2
1 = λ = σ = P =
λ .
77
Figura 3.53 Comparación de las curvas de la Pe para valores de h óptima 5 . 0 ; 128 / 1 ; 1 ; 4 ;
1 2 1
2
1 = λ = αT = σ = P =
λ .
78
Figura 3.54 Comparación de las curvas de la Pe para valores de h óptima 5 . 0 ; 128 / 1 ; 1 ; 3 ;
2 2 1
2
1 = λ = αT = σ = P =
λ .
78
Figura 3.55 Comparación de las curvas de la Pe para valores de h óptima 5 . 0 ; 128 / 1 ; 2 ;
1 2 1
2
1 = λ = σ = P =
λ .
79
Figura 3.56 Comparación de las curvas de la Pe para valores de h óptima 5 . 0 ; 128 / 1 ; 10 ;
1 2 1
2
1 = λ = σ = P =
λ .
79
Tabla 2.1 Comparación del calculo analítico y gráfico del valor óptimo de h. 40 Tabla 2.2 Probabilidad de error mínima considerando el ruido impulsivo en la
entrada del filtro α =1;P1 =0.5.
40
Tabla 3.1 Probabilidad de error mínima considerando el ruido blanco y ruido de impulso en la entrada del filtro =1; 2 =1/128; =0.3; 1 =0.5.
P As
σ α
Resumen
En los sistemas de comunicaciones, la forma de onda recibida por lo general se categoriza en la parte deseada que contiene la información y la parte indeseada [1]. El ruido puede ser definido como cualquier señal indeseada que interfiere con la comunicación, medida o procesamiento de una señal de información [2], así mismo el ruido puede presentarse en diferentes tipos en casi todos los entornos, causando errores de transmisión e incluso interrumpiendo un proceso de comunicación, por lo tanto la evaluación del ruido es un factor importante de las telecomunicaciones modernas, y en los sistemas de procesamiento de señales. Dependiendo de su fuente, un ruido puede ser clasificado como ruido acústico, ruido electromagnético, ruido electroestático, etc. Dependiendo de su frecuencia, un proceso de ruido puede ser clasificado como ruido blanco, ruido colorado, ruido impulsivo, etc, [2].
La recepción de la señal con ruido es un problema muy importante que surge en varias aplicaciones. En la mayoría de los trabajos de investigación sobre la recepción de señales, se asume que la señal está contaminada con ruido Gaussiano y los receptores están diseñados bajo esta suposición [3]. Sin embargo, es también común conocer que varios procesos de ruidos en la vida real, tales como el ruido atmosférico y el ruido acústico, son tipos de ruidos no Gaussianos y presentan un carácter impulsivo [4].
En este estudio se realiza una investigación del funcionamiento del receptor, cuando en la entrada del mismo se presenta una señal binaria acompañada de ruido blanco Gaussiano y ruido de impulso asimétrico, utilizando un filtro RC en la etapa de filtraje. Para tal propósito, el trabajo de tesis se ha organizado en tres capítulos cubriendo los siguientes temas principales.
En el capítulo II, se analiza en forma específica el problema de la recepción de la señal digital con ruido de impulso en su forma asimétrica, determinando el valor de umbral óptimo en forma analítica, que permite obtener la probabilidad de error mínima para diferentes valores de las intensidades de los flujos de Poisson, probabilidades a priori y amplitudes de la señal digital, al final del capítulo se hace una comparación de los valores obtenidos del umbral óptimo en forma gráfica y en forma analítica.
En el capítulo III, se determinan las funciones de densidad de probabilidad, con presencia del ruido blanco Gaussiano y del ruido de impulso, utilizando el método de convolución para dos variables aleatorias independientes. Las funciones de densidad de probabilidad obtenidas por este método, son utilizadas posteriormente para determinar la probabilidad de error mínima. Finalmente, se realiza un análisis comparativo de la calidad en la recepción de la señal, considerando primeramente la presencia del ruido blanco, del ruido de impulso, y posteriormente la presencia de ambos ruidos.
Abstract
In communication systems, the form of wave received is usually categorized in terms of the desired part, which contains the information, and the undesired part [1]. Noise can be defined as any undesired signal which interferes with the communication, measurement or processing of a signal of information [2], itself the noise can manifest in different ways and in almost any environment, causing transmision errors and even interrumpting a processs of communication. Therefore the evaluation of noise is an important factor in modern telecommunication and systems of signal processing. Depending on its source, noise can be classified as acoustic noise, electromagnetic noise, electrostatic noise, etc. Depending on its frecuency, a noise process can be classified as white noise, red noise, impulsive noise, etc, [2].
The reception of signals with noise is a very important problem which arises in various applications. In the majority of investigations about this reception, it is assumed that the signal is contaminated by Gaussian noise, and receptors are designed upon this assumption [3]. However, it is also common knowledge that various kinds of noise in real life situations, such as atmospheric noise and acoustic noise, are types of noise which are always found in numerous areas, are not Gaussian noise and manifest an impulsive character [4].
In this study the functioning of the receptor is investigated when a binary signal, accompanied by white Gaussian noise and asymmetric impulsive noise, is introduced using an RC filter in the filtration stage. To this end the thesis has been organized into three chapters which cover the following important topics.
Chapter 2 analyses in detail the problem of reception of digital signals with asymmetrical impulsive noise, determining analytically the value of the optimal threshold, which allows us to calculate the probability of minimum error for different values of intensities of Poisson flows, a priori probabilities and amplitudes of digital signals. At the end of this chapter graphic and analytical comparisons are made of the values obtained from the optimal threshold.
Chapter 3 determines the probability density functions in the presence of white Gaussian noise and asymmetric impulsive noise, using the method of convolution for two random, independent variables. The functions of probability density thus obtained for this method are later used to determine the minimum error probability. Finally a comparative analysis is made of the quality of signal reception, considering firstly the presence of impulsive noise and secondly the presence of both noises.
Antecedentes
El ruido ha sido un problema siempre presente desde los primeros tiempos de las comunicaciones eléctricas, pero no fue hasta los años 40, cuando se utilizaron los sistemas probabilisticos para analizar y mejorar los sistemas de comunicación que operan con presencia del ruido (Rice 1944; Wiener 1947), sin embargo tales trabajos no fueron reconocidos ampliamente. Claude Shannon a finales de la década de los años 40, publicó su teoría matemática de la información, y esta obra fue el comienzo de la ciencia de la teoría de la información [4].
Una de las características más importantes en un sistema de comunicación, está basada sobre el desempeño del receptor [5], y más específicamente, en el modelo probabilístico que utilice para la evaluación de la probabilidad de error en la recepción de la señal con ruido.
Existen diversas publicaciones que describen el desempeño del receptor en presencia del ruido blanco Gaussiano, sin embargo, pocas investigaciones están dedicadas al estudio del efecto que genera la presencia del ruido impulsivo en el receptor.
Desde los años 60, ha existido un esfuerzo considerable, en el desarrollo exacto de modelos estadísticos para el ruido impulsivo no Gaussiano [6]. Los modelos que han sido propuestos, pueden ser clasificados en dos grandes grupos: modelos empíricos y modelos estadísticos. Los modelos empíricos, son el resultado de intentos para obtener datos experimentales y llegar a expresiones matemáticas familiares, no considerando las características físicas del proceso del ruido.
forma y duración, depende de la característica del canal a través del cual se propaga el impulso [2]. Un proceso de Poisson es utilizado para modelar el tiempo aleatorio de ocurrencia del ruido impulsivo, y un proceso Gaussiano es utilizado para modelar la amplitud aleatoria de los impulsos. Finalmente, la duración finita del carácter del ruido impulsivo es modelada por la respuesta al impulso del filtro lineal. El modelo del ruido impulsivo Poisson-Gauss, está dado por la siguiente ecuación:
( )
∑
∞(
)
−∞ =
− =
k
k kh m T A
m
x (1)
donde: h
( )
m es la respuesta de un filtro lineal que modela la forma del ruido impulsivo. Ak es un proceso Gaussiano con media cero y de varianza σ2.Tk es un proceso de Poisson.
En un modelo Bernoulli-Gauss de un proceso de ruido impulsivo, el tiempo aleatorio de ocurrencia de los impulsos, es modelado por un proceso binario Bernoulli , y la amplitud de los impulsos es modelado por un proceso Gaussiano . Un proceso de Bernoulli , es un proceso binario que toma un valor de 1 con una probabilidad de
( )
mb n
( )
m( )
m bα, y un valor de 0 con una probabilidad de 1−α. La probabilidad de la función de un proceso de Bernoulli está dada por [1]:
(2)
Un proceso de Bernoulli tiene una media:
( )
[
]
αμb =Εbm = (3)
( )
[
b m]
=PB
⎩ ⎧
⎨ α1−α para b
( )
m =1y una varianza:
( )
[
μ]
α(
α)
σ2 =Ε − 2 = 1−
b
b bm (4)
La fdp Gaussiana de media cero que modela amplitudes aleatorias del ruido impulsivo esta dada por:
( )
[
]
⎥ ⎥ ⎦ ⎤ ⎢
⎢ ⎣ ⎡ −
= 22
2 exp 2
1
g g
N
g m
g f
σ σ
π (5)
donde: es la varianza de la amplitud del ruido, en un modelo Bernoulli-Gauss la función de densidad de probabilidad de un ruido impulsivo se representa por:
2
g
σ
( )
[
g m]
(
)
[
g( )
m]
f[
g( )
m]
fNBG i = 1−α δ i +α N i (6)
donde: δ
[
gi( )
m]
es la función delta de Kronecker, además fNBG[
gi( )
m]
es la función acumulativa de la probabilidad discreta, y una función de densidad de probabilidad continua fN[
gi( )
m]
.Los modelos empíricos son usualmente sencillos, y pueden ser una ventaja para obtener algoritmos de procesamiento de señales analíticamente tratables. Sin embargo, ellos no pueden ser descritos por los mecanismos físicos que generan el proceso del ruido, además sus parámetros son a menudo representaciones sin mucho sentido, y las aplicaciones de los modelos empíricos son usualmente limitadas hacia situaciones particulares.
procesos físicos que generan el ruido, y son conocidos como procesos de ruidos no Gaussianos. Sin embargo los modelos son matemáticamente complicados.
Entre los modelos estadísticos para el estudio del ruido impulsivo, se encuentra el trabajo del científico Ercan E. Kuruoglu (1998) [7], quien trabajó sobre la recepción óptima de señales con ruido impulsivo utilizando la distribución simétrica alfa-estable, en ese trabajo examinó la estructura y el funcionamiento de receptores óptimos, diseñados para operar en entornos de ruido impulsivo modelado como un proceso aleatorio estable. Además, recientemente ha existido un gran interés en la distribución alfa-estable simétrica, la cual ha demostrado ser muy exitosa en el modelado del ruido impulsivo. La distribución alfa-estable, tiene una fuerte justificación teórica proporcionada por la generalización del teorema central del límite, y es un buen modelo para representar al ruido atmosférico y sonoro [7], sin embargo el modelo matemático para representar al ruido impulsivo es muy complejo de analizar.
Justificación
En diversas áreas de Telecomunicaciones, tales como sistemas de telemetría, radiocomunicación y radionavegación, suponer la aditividad del ruido Gaussiano hacia la señal resulta poco adecuado, si consideramos que la fuente dominante de interferencia, contiene componentes de ruido significativo denominado “impulsivo”, que indican en gran medida la probabilidad de error de grandes niveles de interferencia [8].
Las fuentes de ruido impulsivo pueden ser naturales o hechas por el hombre, como son: el ruido atmosférico, ruido acústico ambiental, el ruido de ignición y conmutación predominantes en los canales telefónicos, etc. Para aquellas aplicaciones como la transmisión de la voz, el ruido impulsivo es solamente un factor irritante, sin embargo constituye una seria fuente de error, en las aplicaciones que comprenden la transmisión de datos digitales.
El efecto del ruido impulsivo en la operación de un sistema de comunicación convencional, el cual esta construido con la suposición del ruido Gaussiano aditivo es drástico, degradando significativamente el funcionamiento total del sistema, y dando surgimiento a la necesidad de rediseñar los sistemas de comunicaciones, para una mejor efectividad en la salida del filtro con interferencias impulsivas [4].
Objetivo General
Analizar la influencia del ruido blanco Gaussiano y del ruido impulsivo asimétrico en la recepción de una señal digital, basándose en modelos probabílisticos, que nos permitan determinar el valor de umbral óptimo que garantice la probabilidad de error mínima en la recepción de la señal digital.
Objetivos Específicos
• Determinar los modelos probabilísticos que describan las características del ruido blanco y ruido impulsivo asimétrico.
• Analizar y Determinar el tipo de filtro ha utilizar en el receptor, que garantice la mejor relación señal a ruido.
• Analizar en forma específica la influencia del ruido impulsivo asimétrico.
• Encontrar una expresión analítica para el valor óptimo del umbral h con presencia de ruido impulsivo.
• Obtener la probabilidad de error mínima, en la recepción de la señal con influencia del ruido impulsivo asimétrico.
• Determinar las funciones de densidad de probabilidad, con presencia de ruido blanco y ruido impulsivo asimétrico, y obtener la probabilidad de error mínima para este caso.
CAPÍTULO
1
PROCESOS ALEATORIOS Y MODELOS
PROBABILÍSTICOS DEL RUIDO BLANCO
Y RUIDO DE IMPULSO
1.1
Introducción
El ruido presente en un sistema de comunicación, se puede clasificar en dos categorías dependiendo de su origen: el ruido generado por los componentes dentro del sistema de comunicación conocido como ruido interno, y el ruido que proviene de fuentes externas al sistema de comunicación, las que incluyen fuentes atmosféricas y fuentes producidas por el hombre.
Los ruidos producidos por el hombre incluyen las descargas de las líneas de alto voltaje, motores eléctricos, ruido de ignición provocado por los automóviles y ruido provocado por los sistemas de conmutación. Los ruidos de ignición y conmutación como los atmosféricos, se caracterizan por su origen impulsivo. Este es el tipo de ruido predominante en los canales alámbricos y telefónicos [4].
Una fuente importante de interferencia en los sistemas de comunicación, la constituyen las rutas múltiples de transmisión, cuyo resultado se debe a las reflexiones de las ondas electromagnéticas de los edificios, de la tierra, así como también de la refracción del medio de transmisión.
describiendo las propiedades de los procesos aleatorios, que nos permitirán determinar las características estadísticas de ambos ruidos, o mejor dicho los modelos probabilísticos que serán utilizados para su representación.
1.2
Señales aleatorias y procesos estocásticos
Las señales en términos de una de sus más fundamentales características, pueden ser clasificadas en dos grandes categorías: señales determinísticas y señales aleatorias. En cada caso pueden ser continuas o discretas en el tiempo, y pueden tener amplitudes con valores continuos o con valores discretos [2].
Una señal determinística, puede ser definida como una señal que sigue una trayectoria predeterminada en tiempo y espacio, una señal determinística puede ser completamente descrita en términos de una función del tiempo, y el valor exacto de la señal en cualquier tiempo es predecible.
El término proceso estocástico, es ampliamente utilizado para describir un proceso aleatorio que genera señales secuenciales, tales como voz o ruido. En procesamiento de señales, un proceso estocástico, es un modelo de probabilidad de una determinada clase de señales aleatorias, como puede ser un proceso Gaussiano, Markoviano, de Poisson etc,.
Fig. 1.1 Comportamiento de un proceso aleatorio.
La estructura en el tiempo de los procesos aleatorios está definida por la función de covarianza k
( )
τ , y la relación con su espectro de potencia S( )
ω puede encontrarseaplicando la transformada de Wiener-Khinchin:
( )
=∫
( )
ω[
(
ωτ)
]
π
τ S j
k exp
2
1 ω
d (1-1)
( )
ω =∫
k( )
τ[
(
− jωτ)
]
S exp dτ (1-2)
1.3 Enfoques probabilísticos para el mejoramiento de los sistemas
la estructura resultante del filtro se conoce como el filtro óptimo de Wiener. Este tipo de enfoque, es muy apropiado para los sistemas analógicos de comunicación, en los cuales se desea que la salida demodulada del receptor, sea una réplica fiel del mensaje de entrada al transmisor. North sin embargo, propuso a comienzos de 1940 un enfoque más conveniente para el problema de las comunicaciones digitales, donde el receptor debe distinguir entre el número de señales discretas, dentro del ruido de fondo. En realidad North se preocupó solamente en la detección de la presencia o ausencia de un pulso, como la fidelidad de la señal detectada en el receptor, no reviste importancia ninguna para los problemas de detección de la señal, North buscó un filtro que llevará al máximo la relación entre la señal pico y la corriente eficaz en la salida. El filtro óptimo resultante se conoce como filtro acoplado [4].
Los enfoques de Wiener y North, en lo que respecta a la extracción de la señal, fueron el comienzo de lo que hoy en día se conoce como la teoría de la estimación y detección estadística de la señal.
1.4 Procesos Gaussianos
Consideremos ahora, una importante clase de proceso aleatorio extensivamente utilizado en aplicaciones para el modelado del ruido blanco, este proceso es denominado “Gaussiano”.
El proceso Gaussiano es quizás el más utilizado para casi todos los modelos probabilísticos. Algunas ventajas del modelo probabilístico Gaussiano son las siguientes [1]:
• Las fpds Gaussianas pueden modelar la distribución de muchos procesos, incluyendo algunas importantes clases de señales y ruido.
• La suma de muchos procesos aleatorios independientes tienen una distribución Gaussiana, esto es conocido como el teorema del límite central.
1.5 Ruido blanco
n( )
tEn los sistemas de comunicación, la forma de onda recibida por lo general se categoriza en la parte deseada que contiene la información, y en la parte extraña o parte indeseada. La parte deseada es conocida como señal y la no deseada como ruido [4]. El ruido más común que acompaña a la señal en su trayectoria es el ruido blanco, como se mencionó anteriormente es usual describir el comportamiento del ruido blanco a través de procesos Gaussianos.
Se dice que un proceso aleatorio n
( )
t , es un proceso de ruido blanco si posee lassiguientes características generales:
1. La densidad espectral de potencia es constante en todas las frecuencias [2]:
( )
2
0 N
S ω = (1-3)
donde: N0 es una constante positiva.
2. La esperanza matemática del ruido blanco es igual a cero:
( )
>=0<n t (1-4)
3. La función de covarianza del proceso de ruido blanco se obtiene sustituyendo (1-3) en (1-1):
( )
τ δ( )
τ2
0 N
kn = (1-5)
4. La potencia del ruido blanco σ2 es igual a infinito ♣.
(
=)
=( )
= =∞=
∫
∫
∞∞ − ∞
∞ −
ω π
ω ω π τ
σ k S d N d
2 2
1 2
1
0 0
2 (1-6)
1.6 Proceso Binario Markoviano (PBM)
Dado el comportamiento aleatorio del ruido de impulso, existe una gran complejidad para representarlo con modelos matemáticos no Gaussianos. Cuando el ruido de impulso se presenta en el receptor, el ruido pasa por una etapa limitadora que restringe su amplitud, convirtiéndolo en un proceso binario. Uno de los modelos que refleja las propiedades del ruido de impulso es el Proceso Binario Markoviano (PBM). La característica principal de un Proceso Markoviano, consiste fundamentalmente en que el futuro no depende del pasado, solo depende del presente.
El Proceso Binario Markoviano puede representar cualquier señal que contenga dos estados posibles, por ejemplo y , las probabilidades de transición que un estado cambie de uno a otro, se encuentran estrechamente relacionadas con las intensidades de los flujos de Poisson
1
z z2
1
λ y λ2♣♣, cuyas características principales son [9,10,11]:
• Ordinario: El flujo es ordinario si la probabilidad de que ocurran 2,3,4..., eventos en un intervalo de tiempo Δt muy pequeño, es despreciable en comparación de que ocurra un solo evento, es decir:
) ( )
1
( ,
, P i
PtΔt >> tΔt i=2,3.... (1-7)
♣ El modelo del ruido blanco Gaussiano es una idealización matemática, porque tiene una propiedad no
aceptable (potencia igual a infinito).
♣♣ El flujo de Poisson, es conocido como la secuencia de eventos ocurridos en determinados instantes de
• Ausencia de efecto secundario: Si el flujo de Poisson cumple con esta característica, se dice entonces que es un proceso Markoviano, es decir el número de flujos que puedan ocurrir en un intervalo τ1, es independiente al número de flujos que puedan ocurrir en otro intervalo τ1 +Δt, donde Δt es
muy pequeño.
El PBM puede ser representado como lo ilustra la Fig. 1.2:
λ1
z2
11
1
z t1 t2 t
λ2
2 z 1
z
Fig. 1.2 Proceso Binario Markoviano.
Si consideramos que los flujos de Poisson son constantes, decimos que el flujo es estacionario, y entonces las probabilidades de transición que nos permitirán conocer las características estadísticas del PBM (esperanza matemática, varianza etc.) no dependen del tiempo t, y se encuentran definidas por la ecuación de Kolmogorov [12].
( )
∑
=
= N
i i ij j
t P dt
t dP
1
) (
λ (1-8)
( )
t P( )
t Pdt t dP
2 2 1 1
1( ) =−λ +λ (1-9)
( )
t P( )
t Pdt 2 2
t dP
1 1
2( ) =−λ +λ (1-10)
de acuerdo con la ley de la probabilidad:
( )
2( )
11 t +P t =
P (1-11)
y considerando las siguientes sustituciones:
( )
11 λ
λ t = λ2
( )
t =λ2 γ =λ1 +λ2 (1-12)la expresión (1-9) se convierte en:
( )
( )
2 1
dt
1 t =−γP t +λ
dP
(1-13)
aplicando ahora (1-11) a (1-10) y realizando el mismo procedimiento anterior se tiene:
( )
( )
1 2
dt
2 t =−γP t +λ
dP
(1-14)
Considerando que la condición inicial es P1
( )
t0 , la solución de las ecuaciones (1-13) y (1-14) se define de la siguiente manera♣:( )
,( )
( 0) 2(
1 ( 0)0 1 0
1
t t t
t
e e
t P t t
P = −γ − + − −γ −
γ
λ
)
(1-15)
( )
,( )
( 0) 1(
1 ( 0))
0 2
t t t
t
e e
t P t t
P = 2 0 −γ − +λ − −γ − (1-1
γ 6)
♣ Las ecuaciones (1-13) y (1-14) pueden resolverse fácilmente, aplicando cualquier método de solución para
si tenemos el caso estacionario, por lo tanto las probabilidades buscadas quedan definidas por (1-17) y (1-18):
∞ →
t
( )
λγ21 0
1 t ,t =P =
P (1-17)
( )
γ
2 0
2
Ahora bien, una
λ1
,t =P =
t
P (1-18)
vez encontradas las probabilidades y considerando los stados del ruido de impulso y
1 P,P2
e z1 =0 z2 =1, se puede determinar la esperanza matemática
y la varianza del PBM.
( )
( )
γ λ λ γ λ
γ1 2 + 2 1 = 1
= =
〉
〈z t
∑
z P z z zi
i
i Esperanza matemática del PBM (1-19)
( )
( )
2 1 1 122 22 1
γ λ λ γ λ γ ⎢⎣ λ
σ ⎥=
⎦ ⎤ ⎡
− =
〉 〈 − 〉 〈
= z t z t Varianza del PBM
(1-0)
plicación particular, todos los sistemas de omunicación implican tres subsistemas principales: el transmisor, el canal y el receptor. El recepto
eal que garantiza una mejor recepción de la señal binaria es el filtro acoplado (Fig. 1.3), sin embargo su estructu
2
1.7 Filtro acoplado y filtro RC
Los sistemas de comunicaciones son aquellos diseñados para transmitir información, no importa cuál sea la a
c
r está constituido de varias etapas, siendo las más importantes la etapa limitadora, la etapa de filtraje y la etapa de decisión [1].
El tipo de filtro id
posible construirlo físicamente, la relación señal a ruido del filtro acoplado esta dada por la siguiente ecuación [13]:
0
N N⎠fa
⎝
2E S
= ⎟ ⎞ ⎜
⎛ (1-21)
donde: fa N
S
⎟ ⎠ ⎞ ⎜ ⎝
⎛ es la relación señal a ruido en la salida del filtro acoplado.
E es la energía de la señal.
de duración
Por tal motivo, se utilizará en la etapa de filtraje el filtro RC, quien nos proporciona la mejor aproximación del filtro acoplado para la señal digital binaria s
( )
t , de amplitud AsT
y (Fig. 1.4).
Las figuras 1.3 y 1.4 muestran una comparación de la respuesta de salida del filtro acoplado y RC en función del tiempo, cuando en la entrada se tiene un pulso rectangular.
--Fig. 1.3 Recepción de la señal rectangular con filtro acoplado.
--- Filtro
acoplado
Dispositivo de umbral
KAs
∫
Retención T
t
T As
( )
t s0A
T t
0 h
( )
t s( )
t s1( )
t s2( )
t s3( )
t s0 1=
θ
0
=
θ
( )
13
Fig. 1.4 Recepción de la señal rectangular con filtro RC.
Comparando la salida del filtro RC y el filtro acoplado, se puede observar gran
similitu spuesta r pico en el tiempo [13].
( )
t Ssd. La re Ss
( )
T del filtro RC alcanza su valo t=T(
)
[
T]
A RC
T A
T t
Ss s ⎥= s − −α
⎦ ⎤ ⎢
⎣ ⎡
⎟ ⎠ ⎞ ⎜
⎝ ⎛− − =
= ) 1 exp 1 exp
( (1-22)
donde: =1/RC
α es el ancho de banda del filtro.
Calculamos ahora la potencia promedio en la salida del filtro RC, producida en respuesta a una entrada de ruido blanco G
spectral de potencia
aussiano de media igual a cero, y densidad
e
2
0 N
, la función de transferencia del filtro es: Filtro
RC
Dispositivo de umbral
t
T As
( )
t sA 1
=
θ
T t 0
h
0
=
θ
R
) 2 ( 1 1 ) ( RC jf f H π +
= (1-23)
Entonces la potencia promedio del filtro en la salida está determinada por:
( )
∫
∞ = 0 2 0 22 H f df
N σ
(
)
∫
+ = 0 2 0 2 12 πRCf
∞ df N 4 4 0 0 N RC N α =
= (1-24)
za o la e uación (1-22) y (1-24), podemo otencia en la salida del filtro RC en el tiempo
Utili nd c s calcular la relación señal a ruido de
T t=
p , el resultado es:
[
(
)
]
20 2 exp 1 4 T N A N S s fRC α α − − = ⎟ ⎠ ⎞ ⎜ ⎝
⎛ (1-25)
: fRC N S ⎟ ⎠ ⎞ ⎜ ⎝ ⎛
donde es la relación señal a ruido del filtro RC.
(1-21) y (1-25) y sabiendo que E = A2T
Así utilizando para una señal binaria de
amplitud A.
(
)
[
]
22 N S fRC ⎟ ⎠ ⎜ ⎝ ⎞
⎛ 1 exp
T T N S S N fa fRC α α − − = ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ ⎞ ⎛ = ⎟
⎠ (1-26)
a relación de los tres decibeles del filtro RC está dada por [13]:
⎜ ⎝ fa L π α π
2 RC 2
1 =
=
Sustituyendo (1-27) en (1-26):
(
)
[
]
22 exp 1 1
BT BT
N S N
N S
fa
fRC
fz
fRC =π − − π
⎟ ⎠ ⎞ ⎜ ⎝ ⎛
⎟ ⎠ ⎜ ⎝ = ⎟ ⎠ ⎞ ⎜ ⎝
⎛ (1-28)
El comportamiento de la relación (1-28) con el factor BT s
S ⎞
⎛
e muestra en la Fig. 1.5. a curva del filtro RC alcanza un valor pico de 0.816 en BT =0.2
L . Por lo tanto la máxima
lación de salida señal a ruido del filtro RC es solo 0.9 dB por debajo del filtro acoplado, por lo que el filtro RC representa la mejor aproximación del filtro acoplado y de esta manera se justifica la utilización del mismo en la etapa de filtraje.
re
1.8 Fdp en un filtro RC
Para poder determinar la probabilidad de error en la recepción de la señal digital con ruido blanco y ruido impulsivo, es necesario conocer su función de densidad de
robabilidad (fdp) en la salida del filtro. Para tal objetivo vamos a considerar primeramente la f
posteriormente consideraremos la in cia de ambos
influenciado por el ruido blanco al binaria.
donde: es el proceso de salida. p
dp cuando está presente únicamente el ruido blanco Gaussiano (Fig. 1.6), y
fluen ruidos.
Fig. 1.6 Esquema del receptor Gaussiano y la señ
( )
T yh es el valor de umbral. 1
, 0
=
θ es un parámetro de la presentación de la señal.
Aplicando el principio de superposición podemos encontrar el proceso de salida:
( )
T =x( )
T +θy 1 Ss
( )
T (1-29)Si consideramos que el filtro RC es un filtro lineal, y en la entrada tenemos un proceso Gaussiano de media y varianza que caracteriza al ruido blanco, entonces la fdp en la salida del filtro será de tipo Gaussiana definida por la distribució
donde: x1
( )
T es el proceso de salida correspondiente al ruido blanco.( )
TSs es el proceso de salida correspondiente a la señal rectangular.
m σ2
n Gaussiana [14]. Filtro
RC
Dispositivo
de umbral A
h
1
=
θ
0
=
θ
( ) ( )
t nt θs( )
tς = +
(
)
∫
∞
∞
− ⎥
⎥ ⎦ ⎤ ⎢
⎢ ⎣
⎡ −
−
= 2
2 1 1
2 exp 2
1 )
(
σ σ
π
m x x
CAPÍTULO
2
LA RECEPCIÓN DE LA SEÑAL DIGITAL CON
RUIDO DE IMPULSO ASIMÉTRICO
Una de las características principales del ruido de impulso es su comportamiento bastante aleatorio, por lo que su análisis se vuelve muy complejo. En este capítulo se analizará el problema de la recepción de la señal binaria con ruido de impulso asimétrico en la entrada del receptor.
2.1 Influencia del ruido de impulso en la entrada de un receptor
Cuando el ruido de impulso se presenta en la entrada de un receptor, en la salida se tiene un Proceso Binario Markoviano (PBM) denotado como z(t),con amplitud Az, esto se
debe a que el receptor cuenta con circuitos limitadores que restringen la amplitud del ruido de impulso, y por lo tanto puede ser representado como un proceso binario [2].
Si consideramos además una señal rectangular s(t) con amplitud As, entonces en la
entrada del filtro se tienen dos procesos que corresponden a la suma de z(t), con los valores y pudiéndose encontrar una señal rectangular s(t) de duración T y de amplitud variable As.
1 ; 0 2
1 = z =
z
La Fig. 2.1 muestra el esquema del receptor indicando la entrada de las señales z(t) y s(t) al filtro RC.
( ) ( )
t z t s( )
tFig. 2.1 Esquema del receptor con señales de entrada z(t) y s(t).
En este caso ahora tenemos el siguiente proceso de salida:
( )
T =x(T)+θy Ss(T) (2-1)
donde: x
( )
T es el proceso de salida correspondiente al ruido blanco.2.2 Fdps del proceso de salida del filtro RC influenciado por el PBM
asimétrico
Si consideramos que el PBM se encuentra en la entrada del filtro, la función de densidad de probabilidad del proceso de salida está definida por la distribución Beta, y nos representa la salida cuando no hay señal, es decir cuando θ =0.
1 1
2 1 0
2 1
) 1 ( ;
)
( − −
= −
⎟ ⎠ ⎞ ⎜
⎝ ⎛ Γ
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Γ
= α
λ α
λ
θ
α
λ
α
λ
α
γ
x x
x
f 0≤x≤1 (2-2)
donde: γ =λ1+λ2;λ1;λ2 son las intensidades de los flujos de Poisson.
α es el ancho de banda del filtro lineal.
Para evaluar la fdp de salida cuando existe señal, consideremos una variable x′ correspondiente a la fdp [ ] cuando la señal está presente, en donde se involucra la amplitud de la señal digital, por lo tanto se tiene:
) (
1 x
fθ= ′
s A
s A x
x′= + (2-3) Filtro
RC
Dispositivo
de umbral A
h
1
=
θ
0
=
θ
donde: As representa la amplitud de la señal rectangular s(t).
El valor de determina el desplazamiento de la fdp en la salida del filtro RC cuando la señal se presenta con cierta amplitud. Si se deriva (2-3) con respecto a x, se sustituye en (2-1) considerando el cambio de limites, y en términos de una misma variable se encuentra la fdp para el caso cuando existe señal presente en el receptor [15].
s A
1 1
2 1 1
2 1
)] ( 1 [ ) ( ; )
( − −
= − − −
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Γ
⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Γ
= α
λ α
λ
θ
α λ α λ α
γ
s
s x A
A x x
f As ≤x≤As +1 (2-4)
2.2.1 Representación gráfica de fdps del PBM
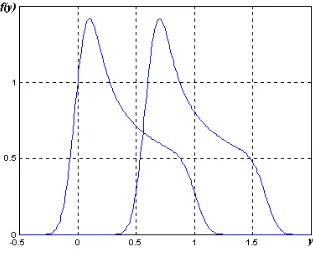
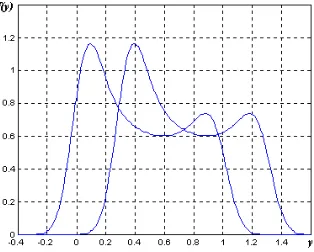
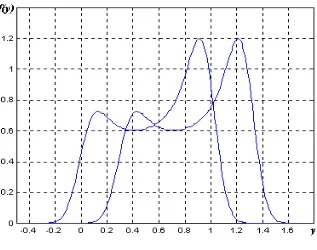
Como se puede observar en (2-2) y (2-4), el comportamiento de la fpd de salida está relacionada directamente con los valores de las intensidades de los flujos de Poisson, por lo que se pueden obtener tantas fdps como valores de λ1 y λ2 se elijan, además si consideramos también que la amplitud es un factor muy importante en las fdps de salida cuando existe señal, entonces el análisis para el ruido de impulso se convierte en un problema no trivial.
s A
A continuación se muestra la representación gráfica de algunas fdps de la
distribución Beta (ecuación 2-2) para diferentes valores de
α λ1
y
α λ2
, en donde podemos
notar la gran cantidad de representaciones de fdps para el ruido de impulso asimétrico. La media de la fdp está en función del valor de λ1, cuando λ1 <λ2 la media de la fdp tiende a
Fig. 2.2 Fdp 1 =1; 2 =2
α λ α λ
.
Fig. 2.4 Fdp 1 =2.5; 2 =3
α λ α
λ
.
Fig. 2.3 Fdp 1 =2; 2 =4
α λ α λ
.
Fig. 2.5 Fdp 1 =2; 2 =3
α λ α λ
Fig. 2.6 Fdp 1 =3; 2 =2
α λ α λ
.
Fig. 2.8 Fdp 1 =3; 2 =1
α λ α λ
.
Fig. 2.7 Fdp 1 =4; 2 =2
α λ α λ
.
Fig. 2.9 Fdp 1 =1; 2 =3
α λ α λ
Fig. 2.10 Fdp 1 =1; 2 =4
α λ α λ
.
Fig. 2.12 Fdp 1 =3; 2 =5
α λ α λ
.
Fig. 2.11 Fdp 1 =3; 2 =4
α λ α λ
.
Fig. 2.13 Fdp 1 =5; 2 =2
α λ α λ
Fig. 2.14 Fdp 1 =2; 2 =1
α λ α
λ
.
Fig. 2.16 Fdp 1 =1.5; 2 =1.5
α λ α
λ
.
Fig. 2.15 Fdp 1 =1; 2 =1
α λ α λ
.
Fig. 2.17 Fdp 1 =3; 2 =3
α λ α λ
.
Para el caso simétrico las intensidades de los flujos de Poisson tienen el mismo valor, es decir λ1 =λ2 =λ, y las fdps de salida son simétricas (Figuras 2.15, 2.16, 2.17).
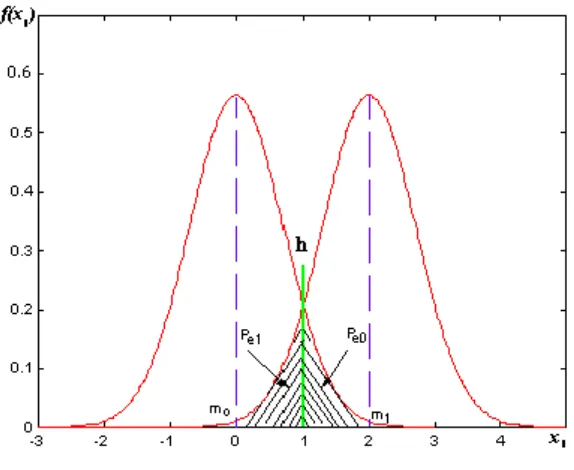
El caso asimétrico consiste en considerar las intensidades de los flujos de Poisson diferentes (λ1 ≠λ2), así como también valores diferentes de las probabilidades a priori, que más adelante se utilizarán para determinar la probabilidad de error y analizar las fdps de salida. Se tienen entonces dos representaciones de fdps asimétricas en la salida del filtro, una cuando existe señal y otra cuando no hay señal . La intercepción que pueda existir entre ellas, nos determinará una región de incertidumbre en la recepción de la señal, y por lo tanto tendremos dos áreas de probabilidad de error denotadas por y
) (
1 x
fθ= fθ=0(x)
0
e
P Pe1,
ambas áreas estarán limitadas por el valor de umbral h fijado en la etapa de decisión.
Fig. 2.18 Áreas de probabilidad de error Pe0 y Pe1
3 . 0 ; 1 ; 4 ;
2 2
1 = λ = α = As =
λ .
0
e
P corresponde a la probabilidad de error de falsa alarma, porque se considera que hay señal, cuando realmente no existe señal, es la probabilidad de error de supresión ó pérdida de señal, porque se considera que no hay señal, cuando realmente sí existe señal,
1
ambas áreas están representadas en la Fig. 2.18, y que para el caso simétrico son iguales (Pe0 =Pe1).
Para determinar la probabilidad de error total en el receptor, es necesario conocer la ley de la distribución de la variable aleatoria y(T) para dos hipótesis: θ =0,θ =1, y aplicar la fórmula de la probabilidad total:
1 1 0
0 Pe P Pe
P
Pe= • + • (2-5) donde: P0, corresponden a las probabilidades a priori. P1
Para evaluar los límites de h, debemos considerar que la distribución Beta cuando no hay señal está acotada en el intervalo de [0,1], y los límites para están definidos en el intervalo [As , As+1], por lo tanto la probabilidad de error total queda
definida de la siguiente manera [15]: )
(
0 x
fθ= fθ=1(x)
Pe
∫
∫
= + = = h As h dx x f P dx x f PPe ( ) 1 1( )
1
0
0 θ θ (2-6)
Sustituyendo (2-2) y (2-4) en (2-6) se tiene:
dx A x A x P dx x x P Pe h h A s s s
∫
− −∫
− − − − − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Γ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Γ + − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Γ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Γ= 1 1 1
2 1 1 1 1 2 1 0 2 1 2 1 )] ( 1 [ ) ( ; ) 1 ( ; α λ α λ α λ α λ α λ α λ α γ α λ α λ α γ (2-7)
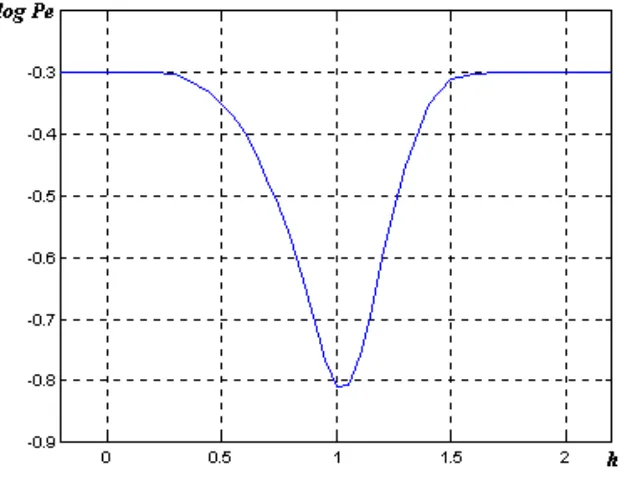
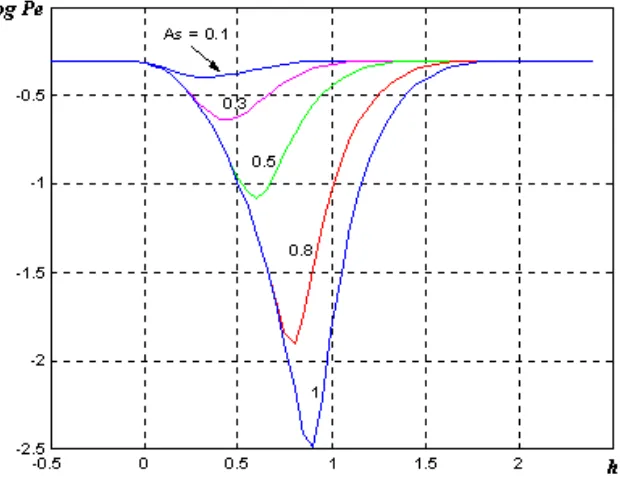
Es posible considerar diversos valores de h en forma arbitraria, sabiendo que su intervalo se encuentra definido de 0 a As +1, obtener una gráfica que nos represente el
comportamiento de la probabilidad de error contra el umbral h, para valores diferentes de
2 1;λ
proporcione la probabilidad de error mínima variando las probabilidades a priori, sin embargo es necesario encontrar una expresión analítica general que nos determine el valor de h óptima.
2.4 Cálculo analítico del valor óptimo de umbral h
Considerando la expresión (2-7), tenemos que si se deriva con respecto a h y se iguala a cero se encuentra el valor de hóptima que nos permite determinar la probabilidad de error mínima, por lo tanto se tiene el siguiente desarrollo [16]:
( )
(
)
[
(
)
]
0 1 ; 1 ; 1 1 1 2 1 1 1 1 2 1 0 2 1 2 1 = ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Γ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Γ + − + ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Γ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Γ =∫
− −∫
− − dh dx A x A x P dx x x P d dh dPe h h A s s s α λ α λ α λ α λ α λ α λα γ α λ α λα γ (2-8)Para resolver (2-8) es necesario aplicar la regla de Leibniz [2]:
( ) ( ) ( ) ( ) − + ∂ ∂ = ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎣ ⎡
∫
∫
y y y y y y f dy y d dx y y x f dy dx y x f d β α β α β β ] ), ( [ )] ( [ )] , ( [ ) , ([ ( )] f[ (y),y] dy
y
d α α
− (2-9)
por lo tanto:
(
)
+ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ Γ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Γ − − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ Γ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Γ = − − − − dh dh h h dh d P dhdPe 1 1
(
)
(
)
[
(
)
]
− ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − − − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ Γ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Γ + ∂ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ − ⎟⎟ ⎠ ⎞ ⎜⎜ ⎝ ⎛ Γ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Γ ∂ + − − −∫
dx P h A h A dhdhh
x x
P s s
h 1 2 1 2 1 1 ; 1 ; 1 2 1 1 1 1 2 1 0 α λ α λ α λ α λ α λ α λ α γ α λ α λ α γ
(
)
[
(
)
]
( )
(
)
[
(
)
]
0 1 ; 1 ; 1 2 1 1 1 2 1 1 2 1 1 2 1 1 = ∂ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣ ⎡ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ⎤ − − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Γ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Γ − ∂ + + ∂ − − − ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Γ ⎟ ⎠ ⎞ ⎜ ⎝ ⎛ Γ −∫
− − − − h A s s s s s s s dx h A x A x P dh A d h A h A A P α λ α λ α λ α λ α λ α λ α γ α λ α λ α γ(
)
[
1]
(
1)
0)
( 1 1
0 1 1 2 1 1 2 1 = − − − − − = − − − − α λ α λ α λ α λ h h P A h A h P dh dPe s
s (2-10)
(
)
[
1]
(
1)
0)
( 1 0 1 1
1 2 1 1 2 1 = − − − − − − − − − α λ α λ α λ α λ h h P A h A h
P s s (2-11)
pero sabemos que:
(2-12)
1
0 1 P
P = −
por lo tanto sustituyendo (2-12) en (2-11):
(
)
[
1]
(
1)
(
1)
0)
( 1 1 1 1
1 2 1 1 2 1 = − − − − − − − − − − α λ α λ α λ α λ h h P A h A h
La expresión (2-13) representa la fórmula general para poder determinar el valor de h óptima. Si se consideran valores diferentes de λ1 y λ2, la expresión (2-13) tiene solución si se convierte en una ecuación polinomial de la forma:
0 .
... 1 0 1
1 + + =
+ −
− h a h a
a h
a n n
n
n (2-14)
donde: . an ≠0
= números reales.
0 1....a
an−
entero positivo.
=
n
La ecuación polinomial (2-14) para n=1,2,3,4,5. es llamada lineal, cuadrática, cúbica, de cuarto y de quinto orden respectivamente, la solución de cada una de ellas nos proporciona el valor de h óptima, y para resolverla en forma general es necesario aplicar algunos métodos algebraicos ó numéricos.
Como se mencionó al principio de este capítulo, las fdps asimétricas del ruido de impulso que se obtienen en la salida del filtro lineal, están definidas por las intensidades de los flujos de Poisson y pueden tomar diferentes valores, es decir las fdps del PBM pueden
ser representadas de diferentes maneras, y por lo tanto se tendrán al sustituir
α λ1
y
α λ2
en
(2-13) ecuaciones polinomiales particulares para diferentes casos, por lo que el análisis del comportamiento de la probabilidad de error contra el umbral h, se realizará para cuatro casos específicos que consideran diferentes comportamientos de la fdp.
CASO I
1 =2; 2 =1α λ α
λ
Si consideramos la distribución de la Fig. 2.14 y sustituimos los valores en la expresión (2-13), tendremos el siguiente polinomio lineal: