SIS
USU
Q
INSTI
ESC
STEMA D
UARIO PA
U
QUE PARA
C
M. EN
ING. Z
TUTO P
UELA SU
MECÁ
DE ADQUI
ARA EL M
N DISPOS
A OBTEN
CONTRO
CRISTYAN
ALONSO
C. MAUR
ZÓSIMO
POLITÉ
UPERIO
ÁNICA Y
ISICIÓN D
MONITOR
SITIVO S
T E S I
NER EL TÍ
OL Y AUT
PRESE
N RUFINO
O TENOR
ASESO
RICIO AAR
ISMAEL B
ÉCNICO
OR DE IN
ELÉCTR
DE DATO
REO Y SIN
SERVO AC
I
S
ÍTULO DE
TOMATIZA
NTAN
O GIL MO
IO RODR
ORES
RÓN PÉR
BAUTISTA
MÉXICO
O NACIO
NGENIER
RICA
OS E INTE
NCRONIZ
CTUADO
E INGENI
ACIÓN
ORALES
RÍGUEZ
REZ ROM
A BAUTIS
O D.F. FE
AGRADECIMIENTOS
TABLA DE CONTENIDO
ÍNDICE DE FIGURAS...VI
ÍNDICE DE GRÁFICAS ... VIII
ÍNDICE DE TABLAS ... IX
INTRODUCCIÓN ... i
OBJETIVO GENERAL ... ii
OBJETIVOS PARTICULARES ... ii
ALCANCE ... iii
JUSTIFICACIÓN ... iii
PLANTEAMIENTO DEL PROBLEMA ...iv
1. HISTORIA DEL ARTE ... 1
1.1. EXOESQUELETO ... 1
1.1.1. Antecedentes Generales... 2
1.1.2. Clasificación ... 4
1.2. REHABILITACIÓN ... 6
1.2.1. Clasificación ... 6
1.2.2. Antecedentes de la Rehabilitación Asistida ... 7
1.2.3. La Rehabilitación en México ... 7
1.3. EXOESQUELETOSYTERAPIATRADICIONAL ... 9
1.4. EXOESQUELETOSDESARROLLADOSDEMIEMBROSUPERIOR .. 10
1.4.1. Sistema de Captura de Movimiento EXOCAP ... 10
1.4.2. Exoesqueleto de 4 GDL de la Universidad de Saga ... 11
1.4.3. Soft-Actuaded. Exoesqueleto de 7 GDL ... 12
1.4.4. MAHI. Dispositivo de Rehabilitación de la Universidad RICE . 13 1.4.5. W-EXOS. Exoesqueleto de 7 GDL ... 13
1.4.6. SRC. Exoesqueleto para Movimiento de Mano ... 14
1.4.7. ASSIST. Órtesis de Soporte Activo ... 15 1.4.8. RUPERT. Robotic Assisted Upper Extremity Repetitive Therapy
1.5.2. Cámaras Lineales ... 17
1.5.3. Cámaras Infrarrojas/Térmicas ... 18
1.5.4. Cámaras 3D ... 18
1.5.5. Cámaras Inteligentes ... 19
1.6. CAPTURADEMOVIMIENTO(MOCAP) ... 20
1.6.1. Primeros Dispositivos ... 20
1.6.2. Brilliance ... 21
1.6.3. Historia Campos de Aplicación del MoCap... 22
1.7. SUMARIO ... 24
2. MARCO TEÓRICO ... 25
2.1. MOVIMIENTOSDELBRAZO ... 25
2.1.1. Flexo-extensión vertical de hombro ... 26
2.1.2. Flexo-extensión de codo y su arco funcional ... 27
2.2. CINEMÁTICA ... 28
2.2.1. Cinemática Inversa... 29
2.3. K)NECT™... 29
2.3.1. Requisitos para Funcionamiento ... 29
2.3.2. Componentes ... 30
2.4. MICROCONTROLADORATMEGA328 ... 31
2.5. PROCESS)NG™ ... 31
2.6. ARTICULACIONESROBÓTICASYGRADOSDELIBERTAD... 32
2.7. SISTEMASDEIMPULSIÓN ... 33
2.8. COMUNICACIÓNBLUETOOTH ... 35
2.9. TECNOLOGÍAWEARABLE ... 36
2.10. SUMARIO ... 36
3. DESARROLLO ... 37
3.1. DESCRIPCIÓNDELSUJETODEPRUEBAS ... 37
3.2. ANÁLISISDELOSMOVIMIENTOSDEREHABILITACIÓN ... 38
3.3. EXPECTATIVADELPROYECTO ... 38
3.4. FUNCIONAMIENTOGENERAL ... 39
3.4.1. Datos ... 40
3.4.3. Comunicación... 44
3.4.4. Resultado... 45
3.4.4.1.Dispositivo Exoesqueleto ... 45
3.5. DIAGRAMADEFLUJOGENERAL ... 46
3.6. DISEÑOPROPUESTODEDISPOSITIVO ... 47
3.6.1. Influencia ... 47
3.6.2. Materiales ... 48
3.6.2.1.PVC Espumado ... 49
3.6.2.2.Órtesis de neopreno ... 52
3.6.3. Diseño ... 53
3.6.4. Armado y sujeción del dispositivo ... 59
3.6.5. Puntos de sujeción... 60
3.7. PARDELSERVOMOTOR ... 63
3.7.1. Cálculo para el servomotor del codo ... 64
3.7.2. Cálculo para el servomotor del hombro ... 65
3.8. CAPTURADEMOVIMIENTO ... 66
3.9. CINEMÁTICAINVERSA ... 68
3.10. ENTORNOPROCESS)NG™ ... 69
3.11. ENTORNOARDU)NO™ ... 75
3.12. MÓDULOBLUETOOTH ... 80
3.13. DESARROLLODELAELECTRÓNICA ... 82
3.14. SUMARIO ... 84
4. RESULTADOS ... 85
4.1. PRUEBASDEFUNCIONAMIENTOINDIVIDUALES ... 85
4.1.1. Prueba para verificar el envío de señales por Bluetooth ... 85
4.1.2. Prueba para verificar la interpretación de ángulos por el servomotor ... 87
4.1.3. Prueba para la localización de articulaciones y detección de profundidad por parte del Kinect™ ... 89
4.2. REALIZANDOELPROCESO ... 91
4.3. PROCESAMIENTODEDATOS ... 95
4.4. ESPACIODEOPERACIÓN ... 95
4.5. ERRORCONELMOVIMIENTODELDISPOSITIVO ... 96
4.6.1. Análisis de la velocidad, posición y aceleración de los
servomotores en funcionamiento ... 97
4.6.1.1.Análisis de la articulación muñeca con ambos servomotores en funcionamiento ... 98
4.6.1.2.Análisis de la articulación codo con ambos servomotores en funcionamiento ... 99
4.6.1.3.Análisis de la articulación muñeca con el servomotor codo en funcionamiento ... 100
4.6.1.4.Análisis de la articulación codo con el servomotor hombro en funcionamiento ... 101
4.6.2. Análisis de la corriente consumida por cada servomotor ... 102
4.7. SUMARIO ...104
5. EVALUACIÓN DEL PROYECTO ... 105
5.1. INTRODUCCIÓN ...105
5.2. CICLODELPROYECTO ...106
5.2.1. Conceptualización ... 106
5.2.1.1.Idea ... 106
5.2.1.2.Estudio de factibilidad ... 107
5.2.1.3.Estudios de ingeniería básica ... 107
5.2.1.4.Estudios de ingeniería de detalle ... 107
5.2.2. Construcción del dispositivo ... 107
5.2.2.1.Construcción ... 108
5.2.2.2.Pruebas ... 108
5.2.2.3.Evaluación y retroalimentación... 108
5.2.2.4.Término ... 108
5.3. ESTRATEGIADELPROYECTO ...108
5.4. COSTOSDEMATERIALES ...109
5.5. COSTOSDEINGENIERÍA ...110
5.6. ANÁLISISDELCOSTODELPROYECTO ...111
5.7. RENTABILIDADDELPROYECTO ...111
5.8. SUMARIO ...112
CONCLUSIONES ... 113
ANEXO A. CÓDIGO EN EL ENTORNO PROCESSING™ PARA EL
PROCESAMIENTO DE COORDENADAS ... 117
ANEXO B. CÓDIGO EN PARA ARDUINO™ PARA EL ENVÍO DE SEÑALES A LOS SERVOMOTORES. ... 121
ANEXO C. CÓDIGO EN PARA EL MICROCONTROLADOR ATMEGA328 PARA EL ENVÍO DE SEÑALES A LOS SERVOMOTORES... 123
ANEXO D. TABLA DE MUESTREO DE ANÁLISIS DE LA MUÑECA CON
AMBOS SERVOMOTORES FUNCIONANDO. ... 125
ANEXO E. TABLA DE MUESTREO DE ANÁLISIS DEL CODO CON
AMBOS SERVOMOTORES FUNCIONANDO. ... 127
ANEXO F. TABLA DE MUESTREO DE ANÁLISIS DE LA MUÑECA CON
AMBOS EL SERVOMOTOR CODO. ... 129
ANEXO G. TABLA DE MUESTREO DE ANÁLISIS DEL CODO CON EL SERVOMOTOR HOMBRO FUNCIONANDO. ... 131
ANEXO H. TABLA DE REGISTRO DEL PROCESAMIENTO DE DATOS
POR PROCESSING™ (COORDENADAS A ÁNGULOS). ... 133
ANEXO I. TABLA DE REGISTRO DEL PROCESAMIENTO DE DATOS POR ARDUINO™ (ÁNGULOS A ANCHO DE PULSO). ... 135
ANEXO J. MANUAL DE COLOCACIÓN DEL DISPOSITIVO
REHABILITADOR ... 137
ÍNDICE DE FIGURAS
Figura 1.10 Exoesqueleto W-EXOS ... 14
Figura 1.13 Evolución de RUPERT ... 16
Figura 1.20 Resultado de uno de los experimentos de Etienne Marey ... 21
Figura 1.23 MoCap usado por EA para videojuegos ... 23
Figura 1.24 MoCap para la industria cinematográfica usada en Avatar ... 23
Figura 1.25 Casco HMD para entrenamientos militares ... 24
Figura 1.26 Análisis de locomoción de un jugador de Futbol ... 24
Figura 2.3 Flexo-extensión vertical de hombro ... 28
Figura . Distancia necesaria para funcionamiento de Kinect™ ... 30
Figura . Componentes del Kinect™ ... 31
Figura 3.1 Etapas del Sistema ... 40
Figura 3.2 Representación de las etapas del sistema ... 40
Figura 3.3 Representación del cálculo mediante componentes... 41
Figura 3.4 Representación de la emisión los rebotes de luz hacia la cámara ... 42
Figura 3.6 Diagrama de Flujo General ... 46
Figura 3.9 Eslabón 1 o eslabón humeral ... 55
Figura 3.10 Eslabón 2 o eslabón de conexión ... 56
Figura 3.11 Eslabón 3 o eslabón brazal ... 57
Figura 3.12 Sistema de los eslabones para ajustar su tamaño ... 58
Figura 3.14 Conexiones entre eslabones ... 59
Figura 3.15 Unión de 2 eslabones a través de un servomotor ... 59
Figura 3.16 Localización de los puntos de sujeción del dispositivo ... 60
Figura 3.17 Diagrama de referencia para obtener centro de gravedad de un cono truncado ... 61
Figura 3.18 Dispositivo rehabilitador armado... 63
Figura . 9 Imagen otorgada cuando Kinect™ mapea su objetivo ... 67
Figura 3.20 Reconocimiento de silueta humana por la librería simpleopenNI ... 67
Figura 3.21 Vectores que simbolizan los eslabones y los ángulos formados entre ellos ... 68
Figura 3.23 Modo en que el programa calcula los ángulos ... 74
Figura 3.24 Diagrama de flujo del entorno Arduino™. Parte ... 78
Figura . Diagrama de flujo del entorno Arduino™. Parte ... 79
Figura . Diagrama electrónico para el shield de Arduino™ ... 82
Figura 3.28 Circuito impreso diseñado en software EAGLE ... 83
Figura 3.29 Circuito impreso en tablilla fenólica... 83
Figura 4.1 Resultado de la prueba de localización de articulaciones y profundidad
... 91
Figura 4.2 Software BlueSoleil para sincronización de Bluetooth ... 92
Figura 4.4 Dispositivo rehabilitador colocado en el Usuario ... 93
Figura 4.5 Programa para detección de articulaciones en funcionamiento calculando ángulos ... 94
Figura . Posición óptima para funcionamiento de Kinect™ ... 96
Figura 4.7 Análisis de la muñeca con ambos servomotores en funcionamiento ... 98
Figura 4.8 Análisis del codo con ambos servomotores en funcionamiento... 99
Figura 4.9 Análisis de la muñeca con el servomotor codo en funcionamiento ... 100
ÍNDICE DE GRÁFICAS
Gráfica 4.1 Gráfica de los ángulos recibidos y ejecutados por cada servomotor ... 94 Gráfica 4.2 Gráfica resultante al analizar muñeca con ambos servomotores funcionando ... 98
Gráfica 4.3 Gráfica resultante al analizar el codo con ambos servomotores
funcionando ... 99 Gráfica 4.4 Gráfica resultante al analizar la muñeca con el servomotor codo en
funcionamiento ... 100 Gráfica 4.5 Gráfica resultante al analizar el codo con el servomotor hombro en
ÍNDICE DE TABLAS
Tabla 1.1. Porcentaje de población con discapacidad según tipo de discapacidad... 9
Tabla 2.1 Definición de segmentos del brazo humano ... 26
Tabla 2.2. Ventajas y desventajas de los sistemas de impulsión ... 35
Tabla 3.1 Expectativas del proyecto ... 39
Tabla 3.2 Comparación de sistemas para realizar MoCap... 42
Tabla 3.3. Características particulares del PVC Espumado ... 49
Tabla 3.4. Resultado de los parámetros de las partes del brazo mediante el modelo de Hanavan ... 54
Tabla 4.1 Tabulaciones del consumo de corriente del servomotor codo ... 102
Tabla 4.2 Tabulaciones del consumo de corriente del servomotor hombro... 103
Tabla 5.1 Estrategia del proyecto ... 108
Tabla 5.2 Costo de los materiales del proyecto ... 109
Tabla 5.3 Costos de Ingeniería ... 110
INTRODUCCIÓN
Desde la primer máquina para rehabilitación asistida por el médico Levacher (Varios, 1825), se han diseñado más máquinas y sistemas que han cambiado en forma, tamaño y complejidad; pasando desde sistemas estáticos hasta sistemas dinámicos y desde elementos mecánicos hasta completos sistemas neumáticos, hidráulicos y electromecánicos.
Al comenzar una era de constante desarrollo científico y tecnológico, la robótica y los expertos en ella comenzaron a incursionar en la industria, como George C. Devor (Devor, 1954) quien desarrolló en 1954 un dispositivo de transferencia programada articulada, y en diversos campos con un contacto más directo con la sociedad, campos como el uso doméstico, el entretenimiento, la educación, la cocina, la medicina, etc.
En el campo de la medicina se encuentran una serie de dispositivos que tienen por característica el relacionarse de manera muy directa con el cuerpo humano, sus movimientos, sus funciones vitales y la manera de servir de apoyo para realizar alguno de estos últimos. Al adentrarse a este campo se pueden encontrar dispositivos como robots de almacenaje y distribución de medicamentos, robots quirúrgicos y robots para la rehabilitación y prótesis.
Los exoesqueletos de miembro superior tienen muchas propiedades adecuadas para la rehabilitación, y al diseñar uno específicamente para aplicaciones de terapia física, considerando el rango de movimiento, la fuerza y la capacidad de adaptarse a las necesidades del paciente, podría resultar en un gran avance para dicho campo.
OBJETIVO GENERAL
Generar un sistema que reproduzca el movimiento de la extremidad superior derecha en la extremidad superior izquierda utilizando un Sistema de Adquisición de Datos, un Microcontrolador ATMEGA328 y un Dispositivo Servo actuado para su aplicación en la rehabilitación física de lesiones de extremidades superiores en movimientos específicos.
OBJETIVOS PARTICULARES
Realizar un sistema de adquisición de datos que, mediante
un sistema de captura de movimiento, adquiera las coordenadas de las articulaciones del brazo derecho.
Comunicar exitosamente el sistema de adquisición de datos
con el dispositivo servoactuado mediante un
microcontrolador que logre la imitación del movimiento de la extremidad superior derecha a la extremidad superior izquierda.
Desarrollar un dispositivo rehabilitador de extremidad
izquierda con dos Grados de Libertad para los movimientos específicos de flexo-extensión de codo y flexo-extensión vertical de hombro.
Conseguir, a través del dispositivo, que una rehabilitación
ALCANCE
El presente proyecto está enfocado en el desarrollo de la ingeniería básica e ingeniería de detalle, que incluye la implementación física de un dispositivo rehabilitador de miembro superior izquierdo, definido como un sistema que tenga la capacidad de supervisar el movimiento de un brazo sano e imitarlo reflejándose en el dispositivo mediante un sistema de adquisición de datos conformado por un sistema de captura de movimiento.
El sistema está enfocado en la captura de los movimientos flexo-extensión de codo y flexo-flexo-extensión vertical de hombro del brazo derecho, y su reproducción en un dispositivo con 2 Grados de Libertad para un adulto con 1.80m de talla. Además, el proyecto involucra el diseño de la HMI con funciones de monitoreo y supervisión para los movimientos del brazo.
JUSTIFICACIÓN
El ser humano realiza una gran cantidad de labores con sus extremidades, y hablando en concreto de las acciones de la vida cotidiana resulta ser que una gran parte de estas son realizadas con las extremidades superiores, y esto puede comprobarse haciendo uso de memoria y recreando alguna rutina, desde actividades sencillas como comer, hasta actividades complejas como conducir un automóvil.
económicos y humanos para desarrollar dispositivos que logren una mejor rehabilitación física.
Actualmente en el territorio mexicano, el sector salud se ha visto involucrado en una serie de recortes presupuestales que no permiten su incursión en este campo de la ingeniería. Por esto, la importancia del presente trabajo radica en desarrollar un dispositivo rehabilitador de miembro superior izquierdo de bajo costo y de movimientos específicos, para reducir los grados de libertad, cuya finalidad sea llegar al sector salud del país sin que implique destinar un gran porcentaje del presupuesto otorgado periódicamente a estas instituciones.
PLANTEAMIENTO DEL PROBLEMA
Técnicas tradicionales de terapia para rehabilitación de brazo implican a un fisioterapeuta y el control de fuerza y movimientos que realiza en el brazo del paciente para trabajar los músculos particulares. La imprecisión que esto pudiese presentar en algún momento lleva a ejercicios inconsistentes, mediciones inexactas y, principalmente, una inadecuada rehabilitación del paciente.
Algunas investigaciones (Rodríguez, 2012) han demostrado que los dispositivos robóticos resultan ser herramientas valiosas en una terapia física al emular de forma similar el movimiento de alguna extremidad o articulación, pero la mayoría de los mecanismos desarrollados para miembro superior no están presentes en México y/o no son destinados a la rehabilitación.
CAPÍTULO I
1.
HISTORIA DEL ARTE
1.1. EXOESQUELETO
Los exoesqueletos pueden clasificarse dentro del grupo de las órtesis. Las órtesis son de dos tipos según su principio de funcionamiento: pasivas y activas (Ver Figura 1.1 y Figura 1.2).
Las órtesis pasivas son, como lo dice el Doctor Carlos Arce: Figura 1.1 Órtesis pasiva. Clasificación
determinada postura. Se utilizan como un soporte rígido en fracturas, condiciones inflamatorias de tendones y partes blandas e injurias nerviosas (Arce, 2005).
Las órtesis activas son dispositivos que permiten y/o facilitan el movimiento de miembros o extremidades. Las órtesis activas se utilizan principalmente para asistir movimientos de músculos debilitados. Una aplicación de las órtesis activas son los exoesqueletos, los cuales se integran por un mecanismo estructural externo acoplado por diversos medios al cuerpo y por una etapa de transferencia de información que permite al usuario realizar el movimiento conjunto de cuerpo y mecanismo.
Un exoesqueleto, se define como un sistema biomecatrónico, donde el mecanismo está adaptado a la estructura física del cuerpo humano, con un control que puede provenir de las mismas señales del cerebro, con sensores conectados a la piel humana y con actuadores que son análogos a las funciones del cuerpo, todos estos elementos pueden actuar como un solo sistema integrado que puede desarrollar variadas actividades (Pons, 2008).
1.1.1. Antecedentes Generales
Los exosqueletos fueron estudiados y desarrollados para propósitos de aplicaciones industriales y médicas desde la década de 1960; adicionalmente algunos exoesqueletos fueron desarrollados con el propósito de incrementar las capacidades
humanas. El primer exoesqueleto activo (Figura 1.3) fue diseñado en 1969, por el profesor Vukobratovic en el Instituto Mihailo Pupin, localizado en la actual Serbia, enfocándose en el miembro inferior; impulsado neumáticamente y con una programación cinemática mínima, para producir una marcha antropomórfica mínima.
A partir de este momento, grandes empresas e investigadores se involucraron en el área inaugurada por Vukobratovic y comenzaron a desarrollar dispositivos propios. Tal es el caso de General Electric® quienes decidieron incursionar en la investigación ya comenzada en Nueva York por la Universidad
Cornell. General Electric® desarrolló Handyman to Hardiman
(Mosher, 1970), este dispositivo consistía en un exoesqueleto
antropomórfico localizado dentro de un robot esclavo de grandes
dimensiones (Ver Figura 1.4) utilizado para amplificar capacidades humanas el cual obtenía sus comandos de entrada a partir de información arrojada por los brazos del usuario.
Figura 1.3 Exoesqueleto de
El año 1982 fue la época que permitió el exitoso desarrollo del primer prototipo de exoesqueleto para asistencia. Ideado con la intención de apoyo a personas que sufrían casos de distrofia o casos similares, el cuál era controlado mediante un joystick.
Países como la extinta URSS, Japón, Estados Unidos, Canadá, y algunos países europeos como Suiza, Italia, Francia y Alemania son considerados los pioneros y quienes instalaron las bases de toda la tecnología de los exoesqueletos.
1.1.2. Clasificación
Los exoesqueletos pueden clasificarse, de acuerdo a su aplicación final, en:
Exoesqueletos amplificadores de potencia. Fueron los
primeros en ser desarrollados, su finalidad en aumentar la capacidad, principalmente de fuerza y carga, del miembro en el que es aplicado.
Los exoesqueletos como tecnologías de asistencia. Son
dispositivos en desarrollo y no existe aún un dispositivo accesible a la mayoría que asista a los discapacitados en su vida cotidiana fuera de los centros terapéuticos. Se espera que con el avance de la tecnología, con la miniaturización de los mecanismos y con el creciente desarrollo de grupos
en bioingeniería, se pueda lograr pronto este objetivo con un producto ergonómico (Guizzo & Goldstein H., 2005).
Los exoesqueletos modernos forman parte de un grupo llamado
Wearable Robots los cuales se definen como sistemas robóticos y mecatrónicos diseñados alrededor de una estructura y función del cuerpo humano que permiten, a través de sus segmentos y juntas, desempeñar una función que emule, apoye o realice el movimiento correspondiente a la parte donde se encuentran acoplados (Pons, 2008). Dichas funciones se clasifican en tres:
Robots Ortópticos. Son sistemas cuya función es reemplazar las funciones de un miembro perdido.
Robots Prostéticos. Su función es la de rehabilitar un miembro que se encuentra atrofiado, sea por un accidente o por una deficiencia patológica.
Robots Extensores. Su función es la de aumentar las habilidades del miembro al que está unido, esta habilidad está relacionada con la fuerza.
Otros autores dividen el estudio de los exoesqueletos en dos partes, en la primera, están los sistemas unidos a los brazos, denominados, exoesqueletos de partes superiores, y en la segunda aquellos sistemas que están unidos a las piernas, denominados exoesqueletos de partes inferiores (Kazerooni, 2006).
Los exoesqueletos para miembro superior pueden ser clasificados bajo los siguientes criterios:
El segmento del miembro superior al que es aplicado
El tipo de actuadores utilizados (motores eléctricos, músculos neumáticos, actuadores hidráulicos u otro tipo).
Los métodos de transmisión de potencia (engranes, bandas,
mecanismos de unión u otro).
La aplicación del robot (robots para Rehabilitación, robot
de asistencia, amplificador de las capacidades humanas, uso combinado).
1.2. REHABILITACIÓN
El término rehabilitación se usa por primera vez en Estados
Unidos a finales de la Primera Guerra Mundial. Como es de
suponerse, el término se crea para hacer frente a la reinserción
profesional y el suministro de prótesis a los mutilados de guerra .
(Juárez, Holguín, & Salamanca, 2006)
Efectivamente, la guerra hizo que los hospitales diseñaran y aplicaran ejercicios físicos de rehabilitación en los hospitales militares (Martínez, Pastor, & Sendra, 1998). Así que, para la Segunda Guerra Mundial, la rehabilitación se había convertido en un concepto que todo médico debía conocer y saber que la rehabilitación no termina hasta que el paciente recupere las habilidades y facultades con las que contaba, incluyendo también el trabajo psicológico (Rusk, 1977).
1.2.1. Clasificación
La Rehabilitación es el conjunto de procedimientos dirigidos a
ayudar a una persona a alcanzar el más completo potencial físico,
psicológico, social, vocacional y educacional compatible con su
deficiencia fisiológica o anatómica y limitaciones
medioambientales . (Alvarado & Cáceres, 2010)
Activa: El fisioterapeuta es el que origina el movimiento de la extremidad del paciente.
Pasiva: El paciente es el encargado de mover su extremidad.
1.2.2. Antecedentes de la Rehabilitación Asistida
No se tiene una fecha específica de cuando se puede establecer el inicio de la Rehabilitación ya que desde las primeras sociedades se presentan aspectos relacionados a este tema tal como se demuestra con un bajorrelieve hallado a la entrada de una tumba egipcia y que se considera la primera ilustración de una persona que utiliza un bastón para ayudarse a caminar.
1.2.3. La Rehabilitación en México
La medicina de Rehabilitación en México registró un mayor impulso a partir de la necesidad de atender a los niños afectados por las epidemias de poliomielitis. En 1951 el Hospital Infantil de México inició la capacitación de terapistas físicos y médicos, dando lugar a los primeros trabajos de investigación en Rehabilitación, de los que fueron pioneros los doctores Alfonso Tohen y Luis Guillermo Ibarra. Posteriormente, en 1952 fue fundado el Centro de Rehabilitación número 5 que se transformó en el Centro de Rehabilitación del Sistema Músculo Esquelético. En la década de
Gubernamental, inició el primer curso formal de especialistas en Medicina Física y Rehabilitación con tres años de duración y las escuelas de terapia física y ocupacional. Este Instituto fue de los primero en su época, en contar con taller de prótesis y órtesis. Años más tarde, por decreto presidencial fechado en abril de 1976, este Centro de Rehabilitación fue transformado en el Instituto Nacional de Medicina de Rehabilitación (INEGI, 2004).
En el año 2000, existían en México 988 asociaciones de y para personas con discapacidad, de las cuales 871 estaban reconocidas oficialmente: 111 se registraron como instituciones de asistencia privada, 637 como asociaciones civiles, 40 como sociedades civiles y otras 83 con otro tipo de registro (INEGI, 2004).
El XIII Censo General de Población y Vivienda 2010 registró que
las personas con algún tipo de discapacidad son 5 millones 739
mil 270, lo que representaba 5.13% de la población total (INEGI, 2010).
Para 2012, la INEGI registró un incremento de más de 1 punto a la
estadística anterior, quedando en 6.6% de la población total. De
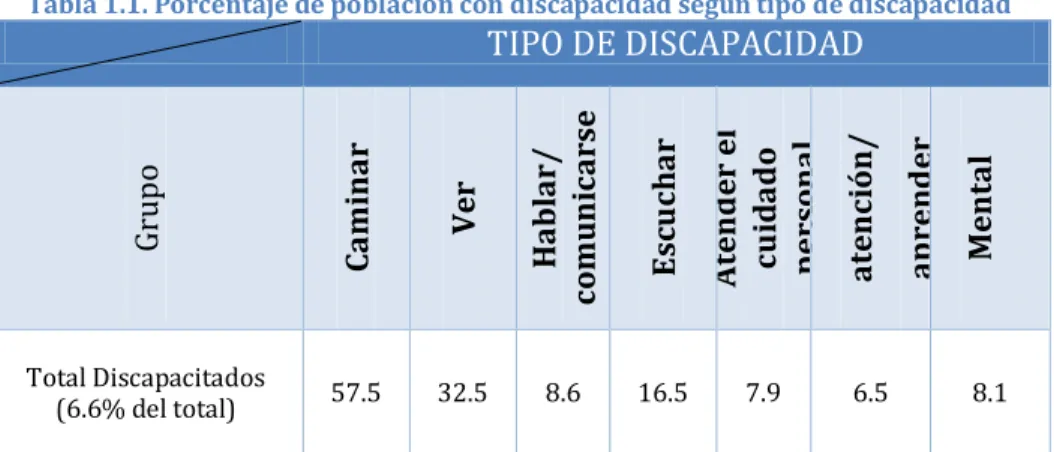
ellos, la mayoría son adultos mayores -60 años y más- (51.4%) seguidos de los adultos entre 30 y 59 años (33.7%), los jóvenes de 15 a 29 años (7.6%) y, finalmente, los niños de 0 a 14 años (7.3%); es decir, 8 de cada diez personas con discapacidad son mayores de 29 años (INEGI, 2013).
Tabla 1.1. Porcentaje de población con discapacidad según tipo de discapacidad
TIPO DE DISCAPACIDAD
Gr up o C ami n ar V er H ab la r/ co mu n ic ar se E sc u ch ar At en d er e l cu id ad o p er so n al P o n er at en ci ó n / ap re n d er Me n ta l Total Discapacitados
(6.6% del total) 57.5 32.5 8.6 16.5 7.9 6.5 8.1
Nota: La suma de porcentaje según tipo de discapacidad es superior a 100 por las personas que reportan más de una discapacidad.
1.3. EXOESQUELETOS Y TERAPIA TRADICIONAL
Los exoesqueletos tienen ventajas sobre las técnicas tradicionales de terapia física, a diferencia de éstas, un exoesqueleto envuelve el brazo y entra en contacto con puntos importantes de él. De esta manera se puede hacer énfasis en el músculo o grupos musculares exclusivos del movimiento (aunque un terapeuta puede hacer esto la elección de un exoesqueleto aumenta formidablemente la precisión) e incluso desarrollar un complemento para el exoesqueleto que permita combinar técnicas como la electro estimulación y movimiento.
Una ventaja más es la precisión, los ángulos de las articulaciones y las fuerzas de contacto se pueden medir minuciosamente y, por lo tanto, el control puede hacerse de la misma manera.
En cualquier tipo de terapia física es importante que no se vea afectada la cadencia natural de los movimientos, las articulaciones de un exoesqueleto se encuentran en la misma ubicación que las articulaciones de un ser humano, por lo que el rango de movimiento tiene un nivel de similitud elevado.
terapeuta es el involucrado en la rutina, desfavorablemente un terapeuta en ocasiones trabaja con varios pacientes a la vez, lo cual puede fatigarlo. Un sistema robótico, en este caso un exoesqueleto, no tiene esta limitación.
1.4. EXOESQUELETOS DESARROLLADOS DE MIEMBRO SUPERIOR
El uso de robots en Rehabilitación tiene dos aplicaciones fundamentales:
Durante movimientos activos del paciente, permiten almacenar información de la realización del movimiento (posición, velocidad, fuerza, entre otros), ayudando de esta forma a evaluar la evolución de la terapia sobre el paciente.
También pueden provocar movimientos pasivos o
resistivos de la extremidad del paciente sujetada por el robot, sustituyendo en este caso al fisioterapeuta.
1.4.1. Sistema de Captura de Movimiento EXOCAP
Inicialmente EXOCAP desarrollo un pequeño prototipo de un brazo manipulador el cual consta de 5 sensores análogos de posición, los cuales mediante una tarjeta de conversión análogo / digital le entrega los datos a la computadora en formato digital. Por software se hace coincidir cada una de las medidas con un ángulo en un modelo simulado del mismo brazo desarrollado con librerías gráficas de código abierto.
Posteriormente utilizando la misma tecnología se elaboró un brazo que forma parte de un exoesqueleto electromecánico (Figura 1.6) (Gómez, Anzola, & Barrero, 2010).
1.4.2. Exoesqueleto de 4 GDL de la Universidad de Saga
Figura 1.6 Exoesqueleto para sistema EXOCAP
vertical y en la extensión horizontal del hombro, en la flexo-extensión del codo, en los movimientos de pronación/supinación del antebrazo. Se encuentra instalado en una silla de ruedas donde personas con debilidades físicas la pueden utilizar, además de que el usuario no carga el peso del exoesqueleto (Figura 1.7).
Un único mecanismo de centro de rotación móvil fue propuesto para la articulación del hombro, dicho mecanismo anula los efectos dañinos causados por las diferencia de posición entre el centro de rotación móvil del hombro del exoesqueleto y el hombro humano; topes mecánicos han sido instalados para cada uno de los movimientos para prevenir sobrepasar los rangos de movimientos de seguridad (Kiguchi, 2007).
1.4.3. Soft-Actuaded. Exoesqueleto de 7 GDL
El exoesqueleto de 7 GDL Soft-Actuaded es capaz de generar
1.4.4. MAHI. Dispositivo de Rehabilitación de la Universidad RICE
Es un dispositivo para Rehabilitación en ambientes virtuales en modo activo y pasivo. Usa manipuladores robóticos que es su principal característica respecto a otros diseños y genera el movimiento de flexo-extensión en el codo, pronación-supinación del antebrazo, flexo-extensión de la muñeca y desviación radioulnar. Está formado por una articulación de revolución en el codo, una articulación de revolución para la rotación del antebrazo y 3 articulaciones esférica-prismática-revolución en serie-paralelo para la muñeca (Figura 1.9) (Gupta & O'Malley, 2006).
1.4.5. W-EXOS. Exoesqueleto de 7 GDL
Fue desarrollado para ayudar a los movimientos de Figura 1.8 Exoesqueleto
Soft-Actuaded
y desviación radioulnar. Considera ejes de desplazamiento en la articulación de la muñeca; la interfaz mano-robot fue diseñada para no perturbar el movimiento de los dedos (Gopura & Kiguchi, 2008).
Figura 1.10 Exoesqueleto W-EXOS
1.4.6. SRC. Exoesqueleto para Movimiento de Mano
Es un exoesqueleto de 7 GDL, de poco peso, que minimiza la inercia debido a la gravedad y de Coriolis de tal forma que los movimientos del brazo del usuario no son afectados. Las perturbaciones de torque pueden ser aplicadas individualmente a cualquiera o a todos los GDL, lo que propició el desarrollo de un ambiente dinámico nuevo, para que los sujetos se puedan adaptar al sistema (Figura 1.11). Miden la posición y el torque en cada articulación, a una tasa de muestreo de 960 Hz, donde calculan velocidad y aceleración a partir de posición (Mistry, Mohajerian, & Schaal, 2005).
1.4.7. ASSIST. Órtesis de Soporte Activo
Es un exoesqueleto de un grado de libertad que es impulsado por actuadores neumáticos suaves, que fueron desarrollados bajo el nombre de órtesis de soporte activo. Fueron desarrolladas dos variantes de este sistema: una con la finalidad de aumentar el rango de movimiento y la segunda con la finalidad de aumentar la resistencia muscular. Físicamente es una interfaz de plástico con la palma y el brazo del usuario y 2 tipos de actuadores rotatorios suaves puestos entre ambos lados del dispositivo como se puede apreciar en la Figura 1.12. La mayor ventaja del dispositivo es la mínima sensación de restricción cuando el dispositivo no está funcionando (Sasaki, Noritsugu, & Takaiwa, 2004).
1.4.8. RUPERT. Robotic Assisted Upper Extremity Repetitive Therapy
Rupert es un exoesqueleto de 4 GDL, impulsado por músculos neumáticos, lo que le da la característica de ser ligero, fácil de usar y bajo costo. Se han desarrollado varias versiones hasta el 2010 las cuales se pueden ver en la Figura 1.13.
Figura 1.13 Evolución de RUPERT
La última versión fue desarrollada a partir de evaluaciones de la versión anterior (Figura 1.13a) en el Centro Médico Regional
Banner Good Samaritan; una estructura hecha de fibra de carbón fue desarrollada para hacer más ligero el robot pero conservando su rigidez; el mecanismo permite la flexión en el hombro de 15 a 85°, la flexión del codo de 0 a 125°, 45° en supinación a 45° en propinación, 60° en flexión a 30° extensión en la muñeca, así como torques de 15 Nm para la articulación del hombro, 15 Nm para el codo, 3 Nm supinación y 15 Nm para la muñeca (Sugar, y otros, 2007).
1.5. CÁMARAS DE VISIÓN ARTIFICIAL
La función de las cámaras de visión es capturar la imagen proyectada en el sensor, vía óptica, para poder transferirla a un sistema electrónico. Las cámaras de video han tenido una rápida evolución en los últimos años, desde las primeras cámaras de video que iban equipadas con tubos Vidicon hasta las más modernas cámaras provistas de sensores CCD (Charge Coupled Devide) y CMOS. Las cámaras que se utilizan en visión artificial requieren una serie de características específicas, como el control del disparo de la cámara para capturar las piezas que pasan por delante de la cámara exactamente en la posición requerida. Estas cámaras pueden ser de diversas clases (INFAIMON, 2014).
1.5.1. Cámaras Matriciales
El término cámaras matriciales o de área se refiere a que el sensor de la cámara cubre un área o que está formado por una matriz de píxeles. Una cámara matricial produce una imagen de una área,
normalmente con una relación de aspecto de 4 a 3 (INFAIMON,
1.5.2. Cámaras Lineales
El concepto de barrido lineal se asocia a la construcción de una imagen línea a línea, utilizando un sensor lineal, de forma que la cámara se desplaza con respecto al objeto a capturar, o bien el objeto se desplaza con respecto a la cámara.
La tecnología de cámaras lineales fue desarrollada para aplicaciones de inspección de materiales fabricados en continuo, como papel, tela, planchas metálicas, etc. Sin embargo en la actualidad se está imponiendo en muchos otros procesos productivos y de inspección, que requieren alta resolución y / o alta velocidad a un precio competitivo.
Las cámaras lineales utilizan sensores lineales que acostumbran a tener entre los 512 y 12.000 elementos (píxeles), con una longitud lo más corta posible, y con una gran calidad con el fin de obtener la
mejor sensibilidad y prestaciones (INFAIMON, 2014).
Figura 1.14 Cámara Matricial para Visión
1.5.3. Cámaras Infrarrojas/Térmicas
Todas aquellas cámaras capaces de funcionar fuera del espectro visible entran en esta clasificación. Existen muchas aplicaciones de visión que requieren soluciones más allá del espectro visible, debido a las características de emisión de los objetos o de la aplicación a evaluar.
Dentro de estos tipos de aplicaciones se encuentran todas aquellas que deben resolverse dentro del infrarrojo lejano más allá de los 1 µm. Existen dos longitudes de onda por excelencia donde trabajan
estas cámaras: de 2 a 5 µm y de 7 a 12 µm (INFAIMON, 2014).
1.5.4. Cámaras 3D
Cámaras para medida de dimensiones 3D, permiten hacer medidas de formas en 3D a velocidades superiores a los 30.000 perfiles por segundo. Estas cámaras están basadas en sensores de fabricación propia. El sistema completo está compuesto por un láser de línea y
Figura 1.15 Cámara Lineal para Visión Artificial
la cámara, además del software de triangulación que permite obtener las medidas 3D (INFAIMON, 2014).
1.5.5. Cámaras Inteligentes
La constante miniaturización de los componentes ha permitido el desarrollo y la proliferación de las cámaras inteligentes. Estas cámaras incorporan los elementos tradicionales de las cámaras convencionales (sensor y electrónica asociada a la captura) pero además se acompañan de un procesador, memoria y sistema de comunicaciones con el exterior (Puerto Serie. I/O, Ethernet), y por tanto componen en sí mismas un sistema completo de visión artificial.
Estas cámaras se pueden presentar en diferentes versiones, desde cámaras entrelazadas de resolución estándar, hasta cámaras de progresivas de alta resolución, o cámaras color. Su reducido
Figura 1.17 Cámara 3D para Visión Artificial
Figura 1.18 Cámara TELEDYNE para Visión Artificial con procesamiento de
tamaño y su ajustado precio las hacen un elemento cada vez más utilizado en las aplicaciones de visión.
1.6. CAPTURA DE MOVIMIENTO (MoCap)
La Captura de Movimiento, Motion Capture o MoCap, es el
procesos de adquirir datos grabando o trackeando el movimiento
de una persona o un objeto. Es usado en la industria militar, en el entretenimiento, en la industria del deporte, industria médica, etc.
1.6.1. Primeros Dispositivos
En el año 1895, los hermanos Lumière desarrollaron un cinematógrafo (Figura 1.19). Este invento junto al revólver fotográfico inventado en 1874 por el astrónomo Jules Janssen para fotografiar el movimiento de Venus, motiva a Etienne Marey para crear una especie de ametralladora fotográfica que contaba con una placa giratoria. El disparo de este dispositivo sacaba doce fotografías en fondo negro. Al tener el fondo negro el sujeto a fotografiar únicamente tenía que vestir un traje con líneas blancas para que sólo sobresaliesen éstas y poder percibir el movimiento (Figura 1.20) (Matroleonardo, 2012).
Figura 1.20 Resultado de uno de los experimentos de Etienne Marey
1.6.2. Brilliance
En 1985 salió al aire el primer spot publicitario realizado
totalmente en ordenador llamado Brilliance creado por Robert
Abel. Por motivos de poca relevancia en el presente trabajo se dejan de lado su impacto y su objetivo comercial para enfocarse en su desarrollo. Por primera vez se utilizaba la tecnología Motion
Capture para la realización de un corto audiovisual. Brilliance, o
también conocido como Sexy Robot (Figura 1.22), resultó ser un
punto de partida para que la tecnología comenzara a ser estudiada a profundidad y, además, comenzara a ser aplicada en diversos campos que se pensaba, hasta ese entonces, ajenos a la ciencia (Matroleonardo, 2012).
1.6.3. Historia Campos de Aplicación del MoCap
Primer acercamiento: Industria del Videojuego
En el mundo de los videojuegos, se utiliza para dotar a los personajes u objetos de animaciones más realistas. También se utiliza para interactuar con el propio juego, como es el caso de los juegos de la Wii y su interacción a través del Wiimote, o los juegos de la PlayStation 3 (Figura 1.23) compatibles con el PlayStation
Eye (Moya, 2008).
Figura 1.21 Captura de pantalla del spot Brilliance
Figura 1.23 MoCap usado por EA para videojuegos
Industria del Cine
Se utiliza para crear personajes con movimientos y expresiones corporales más cercanos al mundo real. Como se puede observar
en la Figura 1.24 la producción de la película Avatar® hizo uso de
este recurso para animar y lograr un completo realismo en sus personajes (Moya, 2008).
Figura 1.24 MoCap para la industria cinematográfica usada en Avatar
Industria Militar
Se está comenzando a usar para permitir a los militares interaccionar con más partes de su cuerpo, agilizando las maniobras en combate, las cuales requieren velocidad y destreza. Un ejemplo en uso, en la aviación, son los cascos que capturan el movimiento y permiten interactuar con dispositivos de realidad aumentada (HMD, Helmet Mounted Display) (Figura 1.25) (Moya,
Figura 1.25 Casco HMD para entrenamientos militares
Industria Médica y Deportiva
Se utiliza para analizar la locomoción. Sirven tanto para estudiar problemas físicos como para mejorar y analizar el rendimiento deportivo (Figura 1.26) (Moya, 2008).
Figura 1.26 Análisis de locomoción de un jugador de Futbol
1.7. SUMARIO
CAPÍTULO II
2.
MARCO TEÓRICO
2.1. MOVIMIENTOS DEL BRAZO
El modelo biomecánico de la extremidad superior (Figura 2.1) se define como una cadena abierta de 5 segmentos rígidos, conectados entre sí por 4 uniones articulares simples.
Estos segmentos se unen por medio de cuatro articulaciones que proveen un total de nueve grados de libertad.
Tabla 2.1 Definición de segmentos del brazo humano
SEGMENTO DEFINICIÓN
Tórax Origen del sistema articulado (Tierra).
Clavícula Desde la articulación esterno-clavicular hasta la acromio-clavicular.
Húmero Desde la articulación gleno-humeral hasta la articulación de codo.
Antebrazo Desde el codo hasta la muñeca.
Mano A partir de la muñeca.
El presente trabajo, únicamente se enfocará en los 2 GDL citados a continuación:
2.1.1. Flexo-extensión vertical de hombro
2.1.2. Flexo-extensión de codo y su arco funcional
Se define la flexión como el movimiento que aproxima la cara anterior del antebrazo con la anterior del brazo, y extensión como el movimiento de retorno del antebrazo a su posición anatómica.
El movimiento de flexo-extensión se lleva a cabo por las articulaciones humero cubital y humero radial. El rango de movimiento normal oscila entre 0° (o extensión completa o posición anatómica) y 140° - 146° de flexión, cuando ésta es realizada activamente, aumentando hasta los 160° (flexión máxima), cuando lo es pasivamente. Sin embargo entre los 30° y los 130° de arco de movimiento es posible realizar la mayoría de actividades cotidianas, es lo que se conoce como arco funcional del codo (Viladot, 2001).
Figura 2.3 Flexo-extensión vertical de hombro
2.2. CINEMÁTICA
La cinemática de los manipuladores es el estudio analítico del
manipulador sin tener en cuenta fuerzas y pares que originan el
movimiento (García, Morales, & Pérez, 2013).
La búsqueda de las relaciones entre las variables de las articulaciones y la localización del Elemento Final (EF) la cinemática de los manipuladores se divide en:
Problema Cinemático Directo. Dado el conjunto de
variables de las articulaciones q t = q t , q t , …, qn t
se encuentra la posición y orientación del EF (García, Morales, & Pérez, 2013).
2.2.1. Cinemática Inversa
El objetivo del problema cinemático inverso consiste en encontrar los valores que deben tomar las variables articulares del manipulador para que su extremo se posicione y oriente según determinada localización espacial.
2.3. KINECT™
Kinect™ es un accesorio desarrollado por Microsoft®.
Kinect™ está compuesto por cámaras y sensores que permitirán
detectar siluetas y por medio de una tecnología llamada mapping
localizará puntos clave de ella que proyectará en un plano de coordenadas para que el sistema pueda interpretar movimientos y detectar objetos. La cámara complementará la función descrita del sensor además de ayudar a aplicaciones de reconocimiento facial. (Archundia, 2006).
2.3.1. Requisitos para Funcionamiento
Para que el sensor Kinect™ funcione correctamente es necesario
considerar un espacio suficiente para poder colocarse de 1.2m a 3.5m de distancia (Figura 2.5).
El espacio ideal para que el campo de visión de las cámaras del sensor tengan un buen funcionamiento y, además, para que el sujeto pueda tener la movilidad suficiente es recomendado un
espacio de 2m x 2m a partir del Kinect™ (García, Morales, & Pérez,
Figura 2.5 Distancia necesaria para funcionamiento de Kinect™
2.3.2. Componentes
El sensor Kinect™ está integrado por los siguientes componentes:
1. Motor eléctrico de la base
2. Ventilador
3. Cámara RGB
4. Cámara infrarroja (Emisor y receptor)
5. Micrófonos
6. Cable USB
Figura 2.6 Componentes del Kinect™
2.4. MICROCONTROLADOR ATMEGA328
El Atmega328 AVR 8-bit es un Circuito integrado de alto
rendimiento que está basado un microcontrolador RISC, combinando 32 KB ISP flash una memoria con la capacidad de leer-mientras-escribe, 1 KB de memoria EEPROM, 2 KB de SRAM, 23 líneas de E/S de propósito general, 32 registros de proceso general, tres temporizadores flexibles/contadores con modo de comparación, interrupciones internas y externas, programador de modo USART, una interfaz serial orientada a byte de 2 cables, SPI puerto serial, 6-canales 10-bit Conversor A/D
(8-chanales en TQFP y QFN/MLF packages), "watchdog timer"
programable con oscilador interno, y cinco modos de ahorro de energía seleccionables por software. El dispositivo opera entre 1.8 y 5.5 voltios. Por medio de la ejecución de poderosas instrucciones en un solo ciclo de reloj, el dispositivo alcanza una respuesta de 1 MIPS, balanceando consumo de energía y velocidad de proceso.
la enseñanza y aplicación de software dentro de las artes visuales y la cultura visual dentro de la tecnología. Inicialmente fue creado
como un cuaderno de bocetos de software y como medio para la
enseñanza de fundamentos de programación. Processing™
actualmente ha sido utilizado como un lenguaje de programación
compatible con la plataforma Arduino™ y, como su nombre hace
referencia, se ocupa como una unidad de procesamiento externa
convirtiendo a un Arduino™ como la interfaz con el medio
(Rendón, 2006).
2.6. ARTICULACIONES ROBÓTICAS Y GRADOS DE LIBERTAD
Existen diferentes tipos de articulaciones. Las más utilizadas en robótica son las que se indican en la Figura 2.7.
La articulación de rotación suministra un grado de libertad consistente en una rotación alrededor del eje de la articulación
(Ollero Baturone, 2001). Está articulación es la más empleada y es
el tipo de articulación que se usará en el dispositivo debido a que los
movimientos que se requieren utilizar son movimietos rotacionales
alrededor de un eje fijo una en la articulación del codo y una en la
articulación del hombro.
2.7. SISTEMAS DE IMPULSIÓN
La velocidad de los movimientos humanos no es una velocidad elevada si se compara, por ejemplo, con movimientos de brazos industriales de alta velocidad como un manipulador brazo Delta (Figura 2.8). Como ejemplo de lo anterior, en el golf profesional la
traduce en velocidades lineales entre 10 y 15 m/s que se puede comparar con una entrada escalón, es decir, no es un movimiento que se mantenga, sino que es un gran impulso en una unidad de tiempo pequeña. Así es posible observar que los movimientos humanos no son lentos pero tampoco son considerados de velocidades extremas, por ello los sistemas de impulsión utilizados para semejar el movimiento humano no es necesario que cuenten con adaptaciones o complementos para manejar velocidades altas, sólo deben considerarse sistemas con un torque que sea capaz de ejercer una fuerza similar a la humana (Ayala, 2012).
Los sistemas de impulsión más comunes se clasifican en 3 categorías: eléctrico, neumático e hidráulico.
Sistemas de impulsión eléctricos
Se le da el nombre de impulsión eléctrica cuando se usa la energía eléctrica para que el robot ejecute sus movimientos. La impulsión eléctrica se utiliza para robots de tamaño mediano, pues éstos no requieren de tanta velocidad ni potencia como los robots diseñados para funcionar con impulsión hidráulica. Los robots que usan la energía eléctrica se caracterizan por una mayor exactitud y repetibilidad (Borger, 2004).
Tabla 2.2. Ventajas y desventajas de los sistemas de impulsión Dispositivos Neumáticos Dispositivos Hidráulicos Dispositivos Eléctricos
Ventajas Fácil de almacenar y transportar
No hay peligro de combustión
No contamina
Bajo costo
Velocidades altas
Aceites de origen mineral
Aceite tiene mucho menor grado de
compresión que el aire, lo que significa mayor precisión
Permite desarrollar fuerzas más grandes
Fáciles de controlar
Más utilizados en la industria
Desventajas Producidos por la misma naturaleza del
aire
Su regulación no es constante debido a la compresión del aire
Difícil mantenimiento
Instalación especial
Caros
Fugas frecuentes
Potencia limitada
2.8. COMUNICACIÓN BLUETOOTH
Bluetooth es la norma que define un estándar global de comunicación inalámbrica, que posibilita la transmisión entre diferentes equipos mediante un enlace por radiofrecuencia. Principales objetivos que esta norma pretende (Sánchez, 2009):
Facilitar las comunicaciones entre equipos móviles y fijos
Eliminar cables y conectores entre éstos
Ofrecer la posibilidad de crear pequeñas redes inalámbricas
telecomunicaciones de cada país. El uso de una banda común de frecuencias significa que se pueden emplear dispositivos que utilicen la especificación Bluetooth en cualquier parte del mundo, y serán capaces de enlazar con otros dispositivos similares, independientemente del país en que se encuentren (Bedillo, De la Cruz, Torres, & Gistas, 2004).
2.9. TECNOLOGÍA WEARABLE
Wearable hace referencia al conjunto de aparatos y dispositivos electrónicos que se incorporan en alguna parte de nuestro cuerpo interactuando continuamente con el usuario y con otros dispositivos con la finalidad de realizar alguna función específica, relojes inteligentes o smartwatchs, zapatillas de deportes con GPS incorporado y pulseras que monitorizan nuestro estado de salud son ejemplos entre otros de este tipo tecnología que se encuentra cada vez más presente en nuestras vidas.
La palabra wearable tiene una raíz inglesa cuya traducción significa "llevable" o "vestible", en el argot tecnológico hace referencia a computadoras corporales o llevables con el usuario, bajo esta concepción el ordenador deja de ser un dispositivo ajeno al usuario el cual lo utilizaba en un espacio definido pasando a ser un elemento que se incorpora e interactúa continuamente con él.
2.10. SUMARIO
CAPÍTULO III
3.
DESARROLLO
3.1. DESCRIPCIÓN DEL SUJETO DE PRUEBAS
3.2. ANÁLISIS DE LOS MOVIMIENTOS DE REHABILITACIÓN
Los estructurantes del trabajo se entrevistaron con el Jefe del Departamento de Urgencias del Hospital General de Zona 197 IMSS Texcoco, el Doctor Daniel Fernández, a quien se le pidió ejecutar una rutina de rehabilitación de miembro superior enfocándose en los movimientos flexo-extensión vertical de hombro y flexo-extensión de codo para analizar la cadencia y velocidad de los movimientos. Los resultados arrojados fueron los siguientes:
El peso total del brazo, desde el hombro hasta el último
extremo de la mano, es equivalente al 5% de la masa corporal (Fernández, 2014).
El peso total del antebrazo, desde el codo hasta el último
extremo de la mano, es equivalente al 2.3% de la masa corporal (Fernández, 2014).
La velocidad de los movimientos de rehabilitación,
específicamente para los dos movimientos mencionados, deben estar comprendidos de tal forma que se complete un movimiento de 180° sobre el eje de una articulación (codo u hombro) de 6 a 15 segundos dependiendo de la sensibilidad del paciente (Fernández, 2014). Esto es aproximadamente igual a un intervalo que va desde 5 a 2 Revoluciones por Minuto (RPM).
3.3. EXPECTATIVA DEL PROYECTO
La siguiente tabla muestra el estado antes del proyecto y el estado que se espera después de la realización del proyecto:
Tabla 3.1 Expectativas del proyecto
ANTES DESPUÉS
Existe un tiempo de espera necesario para que el terapeuta
asigne una cita para sesión de rehabilitación.
Las citas para sesiones de rehabilitación serán agilizadas
ya que el terapeuta podrá atender más citas al evitar que él se encuentre trabajando con
un solo paciente.
El terapeuta debe trabajar con un paciente a la vez ya que él es el
encargado de ejecutar los movimientos de rehabilitación.
El terapeuta podrá trabajar con más de un paciente a la vez ya que su tarea podrá limitarse
a establecer una rutina de trabajo y a supervisar la
correcta ejecución de movimientos.
La efectividad de la ejecución de los movimientos puede estar sujeta a condiciones externas a la
teoría de la rehabilitación física, como puede ser estado de ánimo,
cansancio, factores sociales, etc.
La efectividad de la ejecución se mantendrá dentro de un
margen de calidad, al estar sujeta a la automatización de
un sistema mecánico.
3.4. FUNCIONAMIENTO GENERAL
relacionada con la segunda, la segunda directa y únicamente con la tercera, etc., como puede observarse en la Figura 3.2.
Figura 3.1 Etapas del Sistema
Figura 3.2 Representación de las etapas del sistema
3.4.1. Datos
La etapa de Datos está conformada por el Sistema de Adquisición de Datos (SAD) en donde se aplicó un Sistema de Captura de Movimiento (MoCap) que recibe datos constantemente, y al actualizarse determina movimientos y desplazamientos en función de los ángulos presentados entre el antebrazo, el húmero y la clavícula.
esos movimientos serán reflejados en un dispositivo rehabilitador servoactuado.
El dispositivo utilizado para la captura de movimiento, para un correcto funcionamiento, debe contar como mínimo, con una cámara infrarroja y así poder detectar siluetas y profundidad, el proyecto es casi imposible de realizar con una cámara RGB sencilla, punto que se explicará más adelante.
3.4.1.1. Funcionamiento del Sistema de Captura de Movimiento
(MoCap)
Para el Sistema de Captura de Movimiento se requiere una cámara infrarroja. Esto es necesario porque el sistema propuesto adquiere datos mediante los ángulos detectados por tres ejes (o eslabones), que biológicamente son representados por el antebrazo, húmero y clavícula; y dos ángulos, codo y hombro. El dispositivo MoCap será colocado frente al sujeto a sensar y calculará los ángulos mediante profundidades, esto soluciona el problema de la localización del dispositivo respecto al sujeto, al no utilizar únicamente componentes vectoriales en un plano XY no es necesario que la visión sea lateral y permite realizarla de frente (Figura 3.3).
Figura 3.3 Representación del cálculo mediante componentes
La manera en que se realiza el cálculo del ángulo por
superficie y la recepción de los rebotes de éstas por una cámara (Figura 3.4); de esta manera es posible determinar la profundidad de cada elemento respecto al plano de visión de la cámara. Teniendo conocimiento de la profundidad se realizan cálculos dimensionales en componentes vectoriales respecto al plano perpendicular al plano de visión mencionado para así obtener la relación angular entre dos ejes conectados directamente.
Figura 3.4 Representación de la emisión los rebotes de luz hacia la cámara
3.4.1.2. Hardware
Existen en el mercado una gran variedad de dispositivos y sistemas MoCap que funcionan bajo el principio de visión artificial como puede verse en la siguiente tabla comparativa (Tabla 3.1) (García, Morales, & Pérez, 2013):
Tabla 3.2 Comparación de sistemas para realizar MoCap
Sistemas de Captura de Movimiento
Descripción Costo MNX
Microsoft®
Kinect™
Captura video a una frecuencia de 30Hz, en colores RBG 32-bits y
resolución de 640x480 pixeles.
Light Detection and Ranging LIDAR
Dispositivo LIDAR hace toda la diferencia al momento de mapear
un espacio reducido o analizar la trayectoria en un ambiente sin
gravedad
$10,000.00 a
$200,000.00
MoCap
Se basa en la técnica de fotogrametría que determina las
propiedades geométricas de los objetos y las situaciones especiales de seres vivos a partir
de imágenes fotográficas.
$60,000.00 a
$175,000.00
Vicon
Realiza capturas faciales o actividades extremas. Se pueden
mover las cámaras, adaptar la cantidad, tipo y tamaño de los marcadores y añadir elementos
externos.
$200,000.00 a
$750,000.00
Los cuatro ejemplos descritos anteriormente son sistemas funcionales para el proyecto, y como puede observarse la alternativa más económica, motivo para su elección en este proyecto, resulta ser el Sistema de Captura de Movimiento por
Visión Artificial Kinect™.
3.4.2. Procesamiento
Después de obtener las coordenadas, éstas deben ser interpretadas y procesadas; tarea llevada a cabo por una
computadora a través del entorno Processing™.
Los datos obtenidos deben pasar por una etapa de procesamiento
que permitirá convertir esa información pura a información
Esta etapa puede considerarse la más importante ya que es a la que se puede llamar lógica del dispositivo.
Una computadora funcional deberá tener como mínimo un procesador a 2.4GHz, módulo de comunicación Bluetooth y memoria RAM de 2Gb. Con estas características será posible obtener los resultados deseados.
Se eligió el entorno Processing™ por ser una económica solución
que facilita la etapa posterior Comunicación al no requerir de
alguna Tarjeta de Adquisición de Datos o plataforma especial para la interpretación, basta con direccionar los resultados hacia el puerto USB de la computadora y ahí conectar cualquier dispositivo que permita interpretar las señales.
Después del procesamiento del entorno Processing™ la
computadora envía los datos a un microcontrolador que se encargará de transformar los datos con información angular en pulsos eléctricos para el movimiento de los servomotores. Al tratarse de dos servomotores, donde cada servomotor controla el movimiento de un grado de libertad del dispositivo, la información necesita ser categorizada o etiquetada para que llegue a su destino correcto, es así como el microcontrolador etiqueta la información que recibe para poder enviarla al servomotor correcto.
Los códigos utilizados se basan en una programación orientada a objetos en lenguaje C. Dichos códigos son expuestos y explicados en el Capítulo 3 del presente trabajo.
3.4.3. Comunicación
Al hablar de comunicación es centrarse en un aspecto. La
comunicación entre el entorno Processing™ y el microcontrolador.
puede imaginar el dispositivo a desarrollar es uno cuyo uso podría estar limitado a hospitales o centros de salud. Considerando el constante movimiento que se vive en dichos lugares, y aprovechando la ventaja que otorga la visión artificial, que es la libertad de cableado, se utiliza y se recomienda una comunicación por igual inalámbrica. Para ello se vale de un adaptador Bluetooth compatible con el microcontrolador. De esta manera la conexión física entre el dispositivo y la computadora es prácticamente nula.
3.4.4. Resultado
Como ya se mencionó, después de que el microcontrolador recibe y etiqueta las señales, éstas son enviadas a su correspondiente servomotor para que éste las convierta en magnitudes físicas. Para esto es necesario contar con un dispositivo que logre integrar los objetivos de éstas cuatro etapas en uno solo: La rehabilitación de las articulaciones de miembro superior.
3.4.4.1. Dispositivo Exoesqueleto
El dispositivo rehabilitador está pensado como un exoesqueleto, es decir, un dispositivo que rodea una extremidad superior de tal manera que al ejecutar movimientos sea capaz de mover paralelamente a la extremidad, teniendo en cuenta que el movimiento debe ser lo más natural posible y sin causar un daño o dolor, considerando que la extremidad a la que se encuentre
adherido será una extremidad que necesite rehabilitación por lo cual se encuentra débil, sensible o adolorida.
El dispositivo rehabilitador debe mostrar una gran fidelidad, adaptabilidad a distintos tipos de brazo y fallos casi nulos. Hablando de características físicas no debe ser engorroso, debe ser ligero y de fácil localización. Posteriormente se abordará el tema más específicamente.
3.5. DIAGRAMA DE FLUJO GENERAL