Monterrey, Nuevo León a
INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY
PRESENTE.-Por medio de la presente hago constar que soy autor y titular de la obra denominada "
", en los sucesivo LA OBRA, en virtud de lo cual autorizo a el Instituto Tecnológico y de Estudios Superiores de Monterrey (EL INSTITUTO) para que efectúe la divulgación, publicación, comunicación pública, distribución, distribución pública y reproducción, así como la digitalización de la misma, con fines académicos o propios al objeto de EL INSTITUTO, dentro del círculo de la comunidad del Tecnológico de Monterrey.
El Instituto se compromete a respetar en todo momento mi autoría y a otorgarme el crédito correspondiente en todas las actividades mencionadas anteriormente de la obra.
De la misma manera, manifiesto que el contenido académico, literario, la edición y en general cualquier parte de LA OBRA son de mi entera responsabilidad, por lo que deslindo a EL INSTITUTO por cualquier violación a los derechos de autor y/o propiedad intelectual y/o cualquier responsabilidad relacionada con la OBRA que cometa el suscrito frente a terceros.
de 200
Diseño, Construcción, Instalación e Implementación de Mesa
Vibratoria para la Generación de Sismos en Estructuras a
Escala-Edición Única
Title Diseño, Construcción, Instalación e Implementación de Mesa Vibratoria para la Generación de Sismos en Estructuras a Escala-Edición Única
Authors Juan álvarez Reyes
Affiliation ITESM-Campus Monterrey
Issue Date 2008-05-01
Item type Tesis
Rights Open Access
Downloaded 19-Jan-2017 05:36:13
INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE
MONTERREY
CAMPUS MONTERREY
DIVISIÓN DE INGENIERÍA Y ARQUITECTURA PROGRAMA DE GRADUADOS EN INGENIERÍA
DISEÑO, CONSTRUCCIÓN, INSTALACIÓN E IMPLEMENTACIÓN DE MESA VIBRATORIA PARA LA GENERACIÓN DE SISMOS EN ESTRUCTURAS A
ESCALA. TESIS
PRESENTADA COMO REQUISITO PARCIAL PARA OBTENER EL GRADO ACADÉMICO DE:
MAESTRO EN CIENCIAS CON
ESPECIALIDAD EN INGENIERÍA Y ADMINISTRACIÓN DE LA CONSTRUCCIÓN (ESTRUCTURAS)
POR:
JUAN ÁLVAREZ REYES
INSTITUTO TECNOLÓGICO Y DE ESTUDIOS SUPERIORES DE MONTERREY
Campus Monterrey
División de Ingeniería y Arquitectura
Programa de Graduados en Ingeniería
Los miembros del Comité recomendamos que el presente proyecto de tesis presentado por
el Ing. Juan Álvarez Reyes sea aceptado como requisito parcial para obtener el grado
académico de:
Maestro en Ciencias en Ingeniería y Administración de la Construcción Especialidad en Ingeniería Estructural.
Comité de tesis:
_____________________________
Francisco Yeomans Reyna, Ph. D
Asesor
_____________________________ _____________________________
Delma V. Almada Navarro, M.C.
Coasesor
Carlos Nungaray Pérez, M.C.
Coasesor
Aprobado:
__________________________
Joaquín Acevedo Mascarúa, Ph.D.
Dedicatoria
A ustedes Padres, Arinda y Juan, más que dedicarles este trabajo, se los comparto, porque
todo esto es también suyo. Siempre están ahí para guiarme, apoyarme y aconsejarme ante
cualquier circunstancia. De ustedes he aprendido muchas cosas que me han llevado a ser
quien soy ahora, pero principalmente la manera de luchar para conseguir lo que uno quiere.
Muchas gracias por confiar siempre en mí y enseñarme que “lo realmente valioso en la vida
de un hombre, es el poder alcanzar grandes metas”.
A ustedes hermanos, Cinthya y Darío, les dedico este proyecto porque siempre me han
demostrado su confianza y amistad. Gracias por alentarme a seguir adelante cuando más
cansado estaba y por demostrarme que “un hombre es más grande con la ayuda de un gran
equipo”.
Por último al resto de mi familia, porque siempre me dan los ánimos suficientes para seguir
al pie del cañón, y su ejemplo y enseñanzas siempre están presentes en mi mente para
Agradecimientos
Antes que nada quiero dar gracias a Dios por escucharme y ayudarme en todo momento,
dándome la fuerza, la serenidad y el conocimiento en aquellos momentos en los que declinar
parecía la única salida.
Quiero dar gracias a mis asesores, el Dr. Francisco Yeomans, M.C. Carlos Nungaray y
M.C. Delma Almada porque siempre me compartieron todo su conocimiento y experiencia,
y me dieron su confianza y apoyo para desarrollar este trabajo.
Quiero dar gracias a mis compañeros Davis, Sergio, Vicky, Eduardo, Quetzalli, Héctor,
Marco, Miguel, Javier, Alexa, Mayela y Lorena, porque siempre me mostraron su apoyo
incondicional y de quienes aprendí el verdadero valor de la amistad. ¡Espero que sigamos
siendo muy buenos amigos!
Por último quiero hacer un reconocimiento a todas las personas involucradas de una u otra
manera durante la elaboración de este gran proyecto, ya que sin su apoyo nunca se hubiera
Contenido
GENERALIDADES ... 16
1.1 Introducción ... 16
1.2 Antecedentes... 18
1.3 Línea de Investigación... 19
1.4 Objetivos... 21
1.4.1 Objetivo general... 21
1.4.2 Objetivos particulares ... 21
MARCO TEÓRICO ... 22
2.1 Mesas Vibratorias. ... 22
2.1.1 Características generales. ... 22
2.1.2 Composición de mesas vibratorias. ... 23
2.1.2.1 Estructura Metálica... 24
2.1.2.2 Rodamientos ... 25
2.1.2.3 Actuadores ... 26
2.1.3 Mesas vibratorias fabricadas en instituciones. ... 28
2.1.3.1 Mesa Vibratoria GwNsf... 28
2.1.3.1.1 Descripción general. ... 28
2.1.3.1.2. Estabilidad. ... 29
2.1.3.1.3. Movimiento... 30
2.1.3.1.4. Potencia. ... 31
2.1.3.2 Mesa Vibratoria Uniaxial Del Valle... 32
2.1.3.2.1 Descripción general. ... 32
2.1.3.2.2. Construcción Del Simulador Sísmico ... 33
2.1.3.2.3. Descripción del Sistema Hidráulico ... 35
2.1.3.2.4. Equipo Adicional... 36
2.1.3.3 Mesa Vibratoria Uniaxial de la Universidad de Texas... 36
2.1.3.3.1 Descripción general... 36
2.1.3.3.2. Diseño de la Mesa Vibratoria ... 37
2.1.3.3.3. Construcción De La Mesa Vibratoria... 39
2.2. Equipo de Laboratorio e Instrumentación. ... 41
2.2.1 Transductores de desplazamiento variable lineal (LVDT)... 41
2.2.2 Acelerómetro... 43
2.2.3. Galgas Extensómetricas ... 44
2.2.4 Sistema de Adquisición de Datos. ... 46
2.3 Parámetros de Similitud y Semejanza. ... 47
2.3.1 Clasificación de modelos. ... 47
2.3.4 Relaciones del análisis dimensional... 51
DISEÑO ESTRUCTURAL... 57
3.1 Diseño Geométrico. ... 57
3.1.1 Descripción general... 57
3.1.2 Configuración de elementos. ... 58
3.2 Análisis estructural de la estructura metálica... 59
3.2.1 Consideraciones del análisis. ... 59
3.2.2 Cargas y Combinaciones... 60
3.2.3 Análisis de modelos estructurales. ... 62
3.2.3.1 Primer criterio de análisis... 62
3.2.3.1.1 Modelo 1 ... 62
3.2.3.1.1.1 Descripción del modelo. ... 62
3.2.3.1.1.2 Modelación. ... 63
3.2.3.1.1.3 Resultados... 65
3.2.3.1.2 Modelo 2 ... 68
3.2.3.1.2.1 Descripción del modelo 2. ... 68
3.2.3.1.2.2 Modelación. ... 69
3.2.3.1.2.3 Resultados... 70
3.2.3.1.3 Modelo 3 ... 73
3.2.3.1.3.1 Descripción del modelo 3. ... 73
3.2.3.1.3.2 Modelación. ... 74
3.2.3.1.3.3 Resultados ... 75
3.2.3.2 Segundo criterio de análisis. ... 78
3.2.3.2.1 Descripción de la vivienda. ... 78
3.2.3.2.2 Modelo 1 ... 80
3.2.3.2.2.2 Modelación. ... 80
3.2.3.2.2.3 Resultados ... 81
3.2.3.2.3 Modelo 2 ... 83
3.2.3.2.3.1 Modelación. ... 83
3.2.3.2.3.2 Resultados ... 84
3.2.3.2.4 Modelo 3 ... 86
3.2.3.2.4.1 Modelación. ... 86
3.2.3.2.4.2 Resultados ... 86
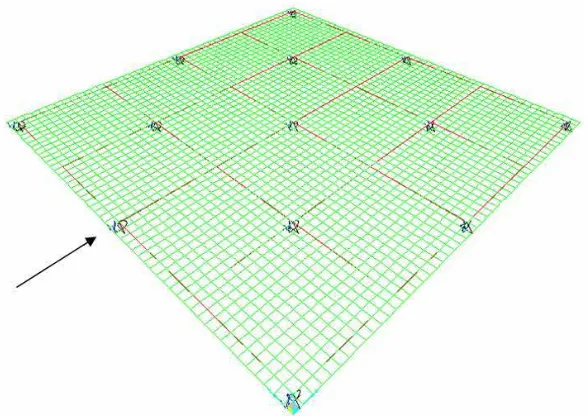
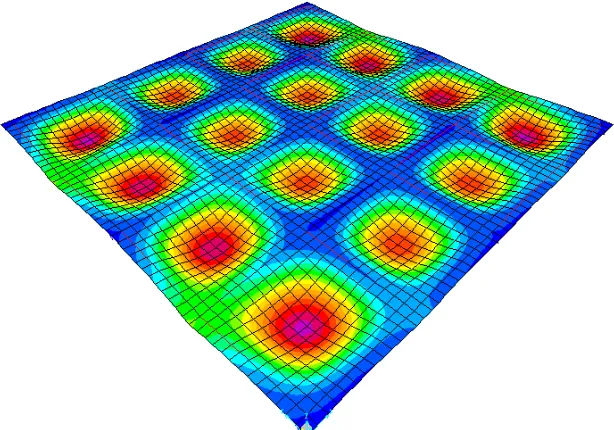
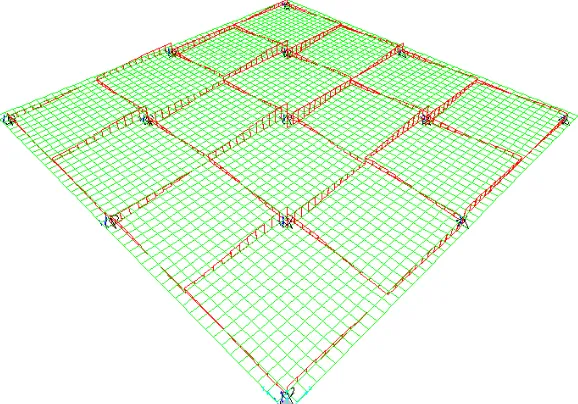
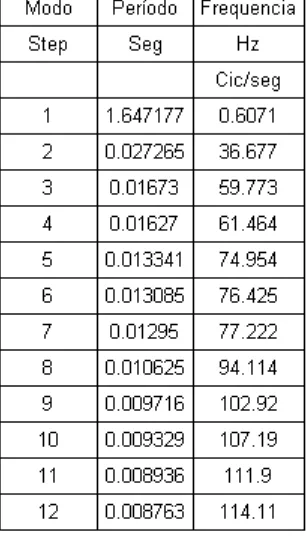
3.2.3.3 Análisis modal de la mesa vibratoria... 89
3.3 Diseño Estructural. ... 93
3.3.1 Descripción de la geometría definitiva. ... 93
3.3.2 Revisión de los perfiles. ... 94
3.3.3 Revisión de los perfiles mediante la ecuación de interacción. ... 95
3.3.4 Revisión de los tornillos de conexión placa principal – perfiles W. .. 96
3.3.5 Revisión de Conexiones entre perfiles W 10x12. ... 100
3.3.5 Selección de los rodamientos lineales... 105
3.3.6 Diseño de la placa de soporte. ... 111
3.3.6.1.2 Número de tornillos en la conexión... 113
3.3.6.2 Diseño de la conexión para miembros en tensión... 113
3.3.6.2.1 Por fluencia de elementos de conexión atornillados... 114
3.3.6.2.2 Por fractura de elementos de conexión atornillados. ... 115
3.3.6.2.3 Revisión del Perfil y la Placa... 115
3.3.6.2.4 Bloque de Corte. ... 115
3.3.6.2.5 Resistencia al Aplastamiento. ... 118
3.3.7 Cimentación. ... 121
3.4 Evaluación del sistema colocando un modelo de vivienda habitacional.128 3.4.1 Características de la vivienda... 129
3.4.1.1 Tecnovivienda propuesta de vivienda experimental... 129
3.4.1.2 Diseño de modelo de Tecnovivienda a escala ... 132
3.4.1.2.1 Parámetro dimensional de tiempo y aceleración... 132
3.4.1.2.2 Parámetro dimensional de longitud ... 132
3.4.1.2.3 Escalamiento del Acero de Refuerzo ... 134
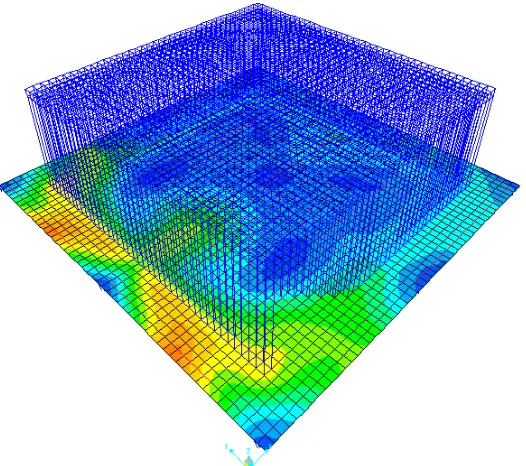
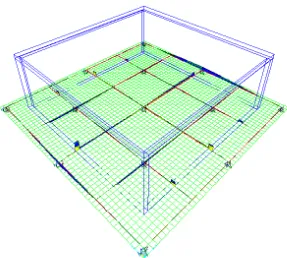
3.4.2 Análisis estructural por el método de elementos finitos. ... 136
3.4.2.1 Análisis de la Tecnovivienda a escala. ... 137
CONSTRUCCIÓN DE LA MESA Y PRUEBAS EXPERIMENTALES ... 143
4.1 Metodología para la construcción de la mesa vibratoria... 143
4.2 Metodología para el montaje de la mesa vibratoria. ... 150
4.3 Descripción del equipo MTS. ... 161
4.3.1 Descripción del equipo. ... 162
4.3.1.1 Actuador Hidráulico Lineal ... 162
4.3.1.2 Sistema de Distribución Hidráulico... 165
4.3.1.2.1 Unidad de Poder Hidráulica Modelo 505.30 ... 165
4.3.1.2.2 Maniful Hidráulico de Servicio... 166
4.3.1.3 Sistema de Control Electrónico ... 166
4.3.1.3.1 MTS Model 493.02 FlexTest SE 1Channel Chassis ... 166
4.4 Metodología para la instalación del equipo mecánico y electrónico... 169
4.4.1 Equipo Mecánico ... 169
4.4.2 Equipo Electrónico... 171
4.4.2.1 Conexión CPU Monitor Controlador... 173
4.4.2.2 Conexión Bomba Hidráulica – maniful ... 174
4.4.2.3 Conexión maniful Actuador ... 176
4.5 Procedimiento para el uso de la mesa vibratoria. ... 178
4.6 Metodología para el desmontaje de la mesa vibratoria... 181
4.7 Metodología para la construcción de la Tecnovivienda... 185
ANÁLISIS DE RESULTADOS ... 190
5.1 Calibración de mesa vibratoria. ... 190
5.2.3 Resultados de la prueba en la Tecnovivienda. ... 208
5.2.3.1 Resultados de los desplazamiento en la Tecnovivienda. ... 208
5.2.3.2 Resultados de los esfuerzos en la Tecnovivienda... 211
CONCLUSIONES ... 214
RECOMENDACIONES... 217
Figuras
Figura 1.1. Sismos de magnitudes mayores a 6.5 en la escala de Richter en México.
...17
Figura 2.1. Modelo de la mesa vibratoria. [6]...23
Figura 2.2 Estructura metálica de mesa vibratoria. [7]...25
Figura 2.3 Rodamientos mecánicos. [8]...26
Figura 2.4 Actuador Hidráulico. [9]...27
Figura 2.5 Sistema de Distribución Hidráulico. [10] ...28
Figura 2.6. Mesa Vibratoria GWNSF. The George Washington University...29
Figura 2.7. Ubicación de actuadores en la plataforma...30
Figura 2.8. Representación de los actuadores. ...31
Figura 2.9. Posición y tipo de movimiento del sistema mecánico del simulador...32
Figura 2.10. Fotografía del Simulador Sísmico...33
Figura 2.11. Esquema general de la cimentación...34
Figura 2.12. Fotografía del Simulador con Detalle de la Placa de Aluminio ...35
Figura 2.13. Fotografía de la mesa vibratoria uniaxial Texas A&M...37
Figura 2.14. Actuador Hidráulico Uniaxial Texas A&M. ...38
Figura 2.15. Conexiones entre perfiles. ...41
Figura 2.16. Transductores de desplazamiento (LVDT). [16] ...42
Figura 2.17. Acelerómetro Uniaxial. [17]...43
Figura 2.18. Partes de una galga extensómetrica. [19]...44
Figura 2.19. Posición de una galga extensómetrica. [19] ...45
Figura 2.20 Sistema de Adquisición de Datos. Modelo PXI. [20]...47
Figura 3.1 Configuración de la mesa vibratoria. ...58
Figura 3.2 Sistema estructural de acero. ...58
Figura 3.3 Características del perfil W10x12 (in). ...59
Figura 3.4 Representación de la cargas de diseño...60
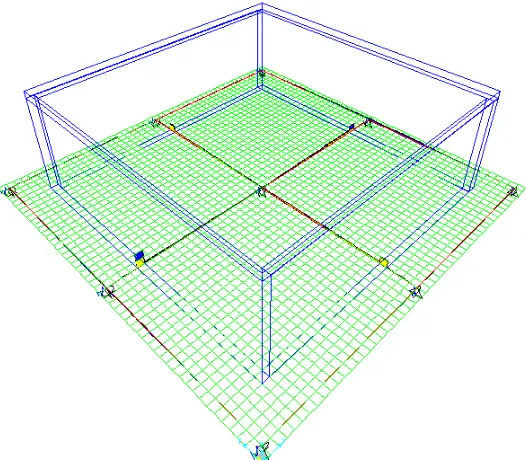
Figura 3.5 Representación del Modelo 1 (vista en planta)...64
Figura 3.6 Vista isométrica del Modelo 1. ...64
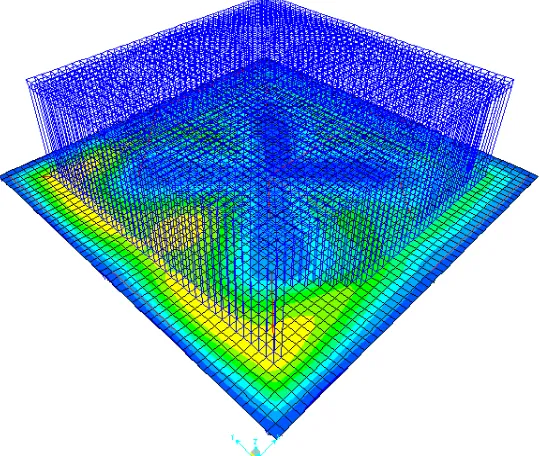
Figura 3.7 Deflexiones en placa (combinación 2) ...66
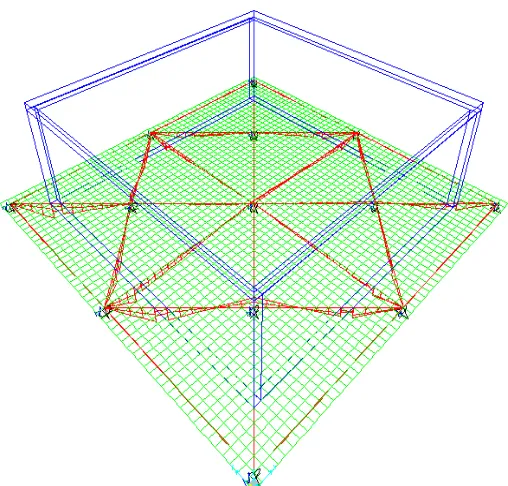
Figura 3.8 Diagrama de cargas axiales (combinación 4) ...66
Figura 3.9 Diagrama de momentos (combinación 4) ...67
Figura 3.10 Diagrama de cortantes (combinación 4) ...67
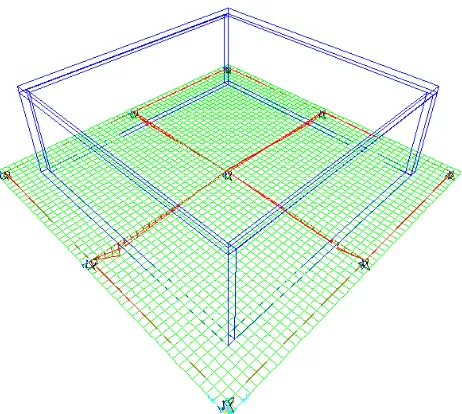
Figura 3.11 Representación del Modelo 2 (vista en planta)...69
Figura 3.12 Vista isométrica del Modelo 2. ...69
Figura 3.13 Deflexiones en placa (combinación 2) ...71
Figura 3.14 Diagrama de cargas axiales (combinación 2) ...71
Figura 3.15 Diagrama de momentos (combinación 2) ...72
Figura 3.16 Diagrama de cortantes (combinación 2) ...72
Figura 3.17 Representación del Modelo 3 (vista en planta)...74
Figura 3.20 Diagrama de cargas axiales (combinación 2) ...76 Figura 3.21 Diagrama de momentos (combinación 2) ...77 Figura 3.22 Diagrama de cortantes (combinación 2) ...77 Figura 3.23 Modelo de la vivienda utilizada en el análisis (metros). ...79 Figura 3.24 Vista isométrica del Modelo 1. ...80 Figura 3.25 Deflexiones en placa (combinación 3) ...82 Figura 3.26 Diagrama de cargas axiales (combinación 3) ...82 Figura 3.27 Diagrama de momentos (combinación 3) ...83 Figura 3.28 Vista isométrica del Modelo 2. ...83 Figura 3.29 Deflexiones en placa (combinación 3) ...84 Figura 3.30 Diagrama de cargas axiales (combinación 3) ...85 Figura 3.31 Diagrama de momentos (combinación 3) ...85 Figura 3.32 Vista isométrica del Modelo 3. ...86 Figura 3.33 Deflexiones en placa (combinación 3) ...87 Figura 3.34 Diagrama de cargas axiales (combinación 3) ...88 Figura 3.35 Diagrama de momentos (combinación 3) ...88 Figura 3.36 Representación gráfica del análisis modal (Criterio 1)...91 Figura 3.37 Representación gráfica del análisis modal (Criterio 2)...92 Figura 3.38 Geometría de mesa vibratoria ...93 Figura 3.39 Configuración de los perfiles W. ...94 Figura 3.40 Conexión placa principal – perfiles W...97 Figura 3.41 Colocación de los tornillos de conexión ½ “ A325 (mm). ...100 Figura 3.42 Conexión entre perfiles W10x12...101 Figura 3.43. Pandeo local de vigas despatinadas en ambos extremos. ...104 Figura 3.44 Numeración de los apoyos con rodamientos. ...105 Figura 3.45 Representación de las reacciones en los apoyos (kgf)...107
Figura 3.46 Gráfica para el factor de corrección, K0. ...108
Figura 5.16. Gráfica de movimiento senoidal 2.0 Hz ...206
Figura 5.17. Gráfica de movimiento senoidal 3.0 Hz ...207
Figura 5.18. Gráfica del desplazamiento LVDT 1, 3 y 4...209
Figura 5.19. Gráfica del desplazamiento LVDT 0, 1, 2, 3 y 4...209
Figura 5.20. Gráfica del desplazamiento LVDT’s interiores 5, 6 y 7. ...210
Figura 5.21. Esfuerzos máximos absolutos (S11) en la vivienda...212
Tabla 3.37. Propiedades escaladas...133
Tabla 3.38. Cálculo de refuerzo de acero escalado para el prototipo. ...134
Tabla 3.39. Cálculo de refuerzo de acero escalado para el modelo. ...135
Tabla 3.40. Resumen de refuerzo de acero escalado para el modelo...136
Tabla 4.1. Descripción de cables ...174
Tabla 4.2. Descripción de cables ...176
Tabla 4.3. Descripción de cables ...177
Tabla 5.1 Sismos para la calibración de la mesa vibratoria. ...191
Tabla 5.2. Porcentajes de error en el sismo “EL CENTRO 1940”...193
Tabla 5.3. Porcentajes de error en el sismo “KOBE 1995”. ...194
Tabla 5.4. Porcentajes de error en el sismo “LOMA PRIETA 1989”. ...195
Tabla 5.5. Descripción de LVDT’s en la prueba...197
Tabla 5.6. Movimientos sobre la mesa vibratoria...198
Tabla 5.7. Porcentajes de error en el sismo “EL CENTRO 1940”...200
Tabla 5.8. Porcentajes de error en el sismo “MEXICO 1985”. ...201
Tabla 5.9. Porcentajes de error en el sismo “NORTHRIDGE 1994”. ...202
Tabla 5.10. Porcentajes de error en el sismo “LOMA PRIETA 1989”. ...203
Tabla 5.11. Porcentajes de error en el sismo “KOBE 1995”. ...204
Tabla 5.12. Porcentajes de error en el sismo “SENOIDALES”. ...207
Tabla 5.13. Movimientos sobre la mesa vibratoria...208
Tabla 5.14. Desplazamientos de la simulación en muros interiores. ...211
Capítulo 1
GENERALIDADES
1.1 Introducción
A lo largo de la historia, grandes catástrofes originadas por fenómenos naturales como sismos, inundaciones y erupciones volcánicas, entre otras, han ocasionado pérdidas incalculables de vidas y han generado pérdidas millonarias en la infraestructura básica de los países. Con el fin de reducir estos estragos, se han realizado investigaciones enfocadas a minimizar los efectos de los fenómenos naturales en la infraestructura y ofrecer mayor seguridad a sus usuarios.
México es un país de fuerte actividad sísmica, como lo demuestran los sismos de Oaxaca, en 1999, en el cual murieron 20 personas, y el de la ciudad de México de 1985, en el cual murieron más de 9,500 personas. Como resultado de esta actividad sísmica urgen medidas para proteger las vidas de los habitantes así como la integridad estructural de su vivienda. [1]
Durante el periodo de 1900 al 2000 se han presentado movimientos sísmicos importantes en México de diferentes magnitudes e intensidades. Si se grafican los más importantes según su magnitud se obtiene la Figura 1.1 que representa un resumen de los movimientos registrados con magnitudes superiores a 6.5 en la escala de Richter. [1]
Figura 1.1. Sismos de magnitudes mayores a 6.5 en la escala de Richter en
México. [1]
Los daños producidos por los sismos en las estructuras han provocado que el estudio sobre este fenómeno se incremente a medida que pasa el tiempo. Estos estudios requieren de la implementación de técnicas y sistemas que permitan conocer de una manera precisa el comportamiento en estructuras, principalmente en edificios de gran altura.
El desarrollo de estrategias para minimizar pérdidas y reducir la devastación a consecuencia de sismos es de gran importancia. Avances a realizarse en este de campo de investigación tendrán grandes implicaciones sociales y económicas en las vidas de las personas.
analítico, y para exponer dificultades que pueden no haber sido consideradas en estudios analíticos.
1.2 Antecedentes
En lo que se refiere a la evaluación experimental de modelos estructurales se puede mencionar que el primer experimento con cargas sísmicas mediante un equipo centrífugo fue llevado a cabo en 1940 por Pohorsky y Fedorov. Donde fue diseñado un sistema especial de suspensión, el cual permitía oscilar mientras el equipo centrífugo estaba activado. [2]
En 1956 en la Universidad de California, se fabricó un simulador de sismos usando elementos con piezas eléctricas. Una pieza eléctrica de cerámica es un elemento artificialmente polarizado que produce esfuerzos cuando es expuesto a un campo eléctrico y es directamente proporcional a la magnitud que produce el campo. El movimiento del elemento puede ser monitoreado por un control eléctrico. [2]
Una mesa vibratoria para simular sismos fue elaborada en la Universidad Nacional de Ciencias Aplicadas en Kaohsiung (Kaohsiung) en 1996, la cual funciona mediante un actuador hidráulico controlado mediante una computadora que reproduce las vibraciones de un sismo de diferentes niveles y sobre la cual se colocan modelos de edificaciones hechos a base de papel. [3]
En Junio de 1998 por parte de la Universidad de California (Pasadena, California) se elaboró un sistema vibratorio de simulación de sismos que funciona mediante unidades separadas de vibración colocadas en la base de la estructura, lo cual le brinda movimientos con tres grados de libertad en diferentes direcciones verticales y horizontales. En el caso de un edificio se colocan las bases de las columnas sobre las unidades de vibración y se aplican los desplazamientos. [4]
En la Universidad de California en mayo del 2004 a cargo de Kenyon D. Potter se construyó un dispositivo educativo para simular los efectos de un sismo que incluye una placa de soporte colocada sobre amortiguadores o miembros flexibles que permiten el movimiento de lo modelos. La velocidad del movimiento en la mesa vibratoria depende del peso de los modelos colocados sobre la placa principal. [4]
En septiembre de 1993 en la compañía Quellette Machinery Systems, Inc. (St. Louis, MO) se desarrolló una máquina para simular sismos con una plataforma vibradora montada sobre un marco de acero, y es movida mediante un pistón hidráulico, controlado mediante un circuito eléctrico.[5]
Las Universidades de países desarrollados en esta área del conocimiento como: Estados Unidos, Francia, Japón, etc. han desarrollado sistemas más modernos utilizando equipos hidráulicos que aplican movimientos oscilatorios a una mesa metálica provocando que los modelos en la superficie presenten una frecuencia de movimiento similar a la que produce un sismo.
1.3 Línea de Investigación
El Instituto Tecnológico y de Estudios Superiores de Monterrey (ITESM), Campus Monterrey a través de la División de Ingeniería y Arquitectura (DIA) ofrece dentro de su programa de posgrado la Maestría en Ciencias en Ingeniería y Administración de la Construcción (MAC).
ecosistemas, entre otros. Para llevar a cabo este proyecto ha creado Centros y Cátedras de Investigación.
El Centro de Diseño y Construcción (CDC) ha nacido de la búsqueda por incrementar la competitividad internacional de la industria de la construcción en México al apoyar la transferencia de tecnología en el análisis, diseño y construcción de proyectos de Ingeniería Civil y Arquitectura, desarrollando proyectos de investigación de donde emerge la Cátedra de Vivienda.
La Cátedra en Vivienda tiene como objetivo fundamental el estudio, desarrollo e innovación de procesos y tecnologías de vivienda así como el estudio de metodologías y esquemas financieros y sociales que coadyuven a la solución del problema de vivienda.
La visión de la Cátedra de Vivienda contempla consolidar una posición internacional del ITESM en materia de vivienda, logrando el reconocimiento del profesorado, la investigación generada y el impacto social de los proyectos y propuestas, así como la implementación de los mismos en México y otros países.
En esta Cátedra también se cubren las áreas de transferencia tecnológica, técnicas de autoconstrucción, minimización del impacto de fenómenos naturales sobre la vivienda a través de métodos de aislamiento sísmico, etc. Sobre este último se tiene contemplado contar con el equipo para realizar pruebas en el Laboratorio con el fin de obtener los resultados y así poder mejorar los sistemas estructurales y de construcción utilizados. Es por esto que el desarrollo tecnológico y la adquisición de equipo de simulación son de gran importancia para el desarrollo de nuevos sistemas y así poder brindar mayor seguridad a la sociedad en general.
1.4 Objetivos
A continuación se presenta el objetivo general de la presente tesis, así como los objetivos particulares de la misma.
1.4.1 Objetivo general
Realizar el diseño, construcción, instalación e implementación de una mesa vibratoria de 5x5 m. de un grado de libertad y sus componentes para la generación de cargas sísmicas sobre modelos estructurales con la cual se pueda estudiar el efecto de los sismos sobre sistemas estructurales.
1.4.2 Objetivos particulares
• Definir la ubicación de la mesa vibratoria y sus componentes de acuerdo a las características del Laboratorio de Estructuras.
• Realizar el diseño estructural de los elementos que compondrán la mesa vibratoria y realizar el análisis mediante un programa estructural (SAP 2000)
• Realizar simulaciones de los modelos sobre la mesa vibratoria en programas estructurales para conocer el comportamiento que sufre bajo cargas sísmicas.
• Coordinar la instalación del equipo y sus componentes de acuerdo a las especificaciones del proveedor.
Capítulo 2
MARCO TEÓRICO
2.1 Mesas Vibratorias.
El objetivo principal de una mesa vibratoria es aplicar vibraciones sobre un modelo a escala obteniendo así una simulación de los efectos reales que causan los sismos sobre las estructuras. Mediante esta serie de experimentos, los ingenieros pueden obtener información de los niveles de daños y de las características necesarias para que un tipo de sistema estructural se comporte de manera adecuada cuando se presente el fenómeno sísmico.
La efectividad de la prueba mediante los simuladores en el laboratorio dependerá principalmente de la adecuada interpretación de los resultados y de la alta calidad en el equipo utilizado durante la prueba.
2.1.1 Características generales.
Las mesas vibratorias son simuladores sísmicos que presentan diferentes condiciones de movimiento de acuerdo a la cantidad de dispositivos generadores de potencia (actuadores) con los que cuentan. En el mercado podemos encontrar simuladores con movimiento uniaxial, biaxial, etc. esto depende del número de grados de libertad con los que cuenta (tres desplazamientos sobre los ejes X, Y Z y tres rotaciones sobre cada uno de los ejes) [5]. El número de grados de libertad depende del número de actuadores presentes sobre la mesa vibratoria.
El costo generado por la mesa vibratoria dependerá del nivel de equipamiento utilizado, por lo que la mayoría de las mesas vibratorias existentes presentan menores grados de movimiento, y los científicos se deben de adaptar a las características presentes para obtener los resultados adecuados (figura 2.1).
Figura 2.1. Modelo de la mesa vibratoria. [6]
Un factor fundamental en el diseño de una mesa vibratoria es el número de grados de libertad que la mesa impondrá a la estructura sujeta a prueba. Es ampliamente aceptado que una simulación de un sismo con un grado de libertad es adecuada para probar la supervivencia de una estructura. Al incluir grados de libertad adicionales se obtiene una simulación más precisa a costa de un drástico incremento en su costo y sólo un moderado beneficio en la precisión de la simulación.
2.1.2 Composición de mesas vibratorias.
A continuación se presentan las partes importantes que debe contener una mesa vibratoria:
A. Estructura Metálica. Empleada para colocar modelos estructurales que se desean probar.
B. Rodamientos. Permiten el libre movimiento en una dirección determinada. C. Actuadores. Encargados de mover la estructura metálica.
2.1.2.1 Estructura Metálica
La estructura metálica, también llamada mesa metálica, es la parte del sistema vibratorio en donde se colocan los modelos estructurales para realizar las pruebas sísmicas.
Los materiales utilizados para la construcción de la estructura metálica deben tener características que permitan al sistema en conjunto un comportamiento adecuado al momento de aplicar las cargas sísmicas. Por lo tanto es de gran importancia su selección bajo las siguientes características: ligereza, rigidez lateral, resistencia a la flexión y resistencia a la fatiga principalmente. En la mayoría de los casos los materiales que se utilizan son principalmente placas y perfiles de acero comercial de alta resistencia. La finalidad de los perfiles es la de disminuir la deflexión de la placa principal buscando siempre mantener un peso bajo de la estructura en conjunto. Ver Figura 2.2.
La configuración de los elementos estructurales de la mesa debe proporcionar la suficiente rigidez para resistir las cargas producto del peso de los modelos, además de soportar las cargas horizontales y verticales provocadas por la aplicación del fenómeno sísmico.
Figura 2.2 Estructura metálica de mesa vibratoria. [7]
2.1.2.2 Rodamientos
Los sistemas de rodamientos son indispensables para permitir el libre movimiento de la estructura en una dirección determinada. Los rodamientos, también llamados guías lineales, pueden ser sustituidos por actuadores hidráulicos en el caso de considerar diferentes grados de libertad. En el caso de sistemas con un grado de libertad se utilizan rodamientos en una sola dirección restringiendo las rotaciones y desplazamiento en otras direcciones.
En sistemas en donde se generan movimientos horizontales se requiere considerar guías lineales para lograr un adecuado deslizamiento con la menor fricción producida y la capacidad de carga requerida en compresión y tensión.
Figura 2.3 Rodamientos mecánicos. [8]
Las guías lineales son diseñadas para soportar la carga del modelo en compresión y en tensión producto de las diferentes aceleraciones en las dos direcciones, además de tomar en cuenta que la fricción que generan es la adecuada para producir el menor esfuerzo para el deslizamiento del sistema.
2.1.2.3 Actuadores
Los actuadores son sistemas hidráulicos que generan desplazamiento en la estructura mediante una fuerza aplicada con diferentes aceleraciones, de manera lineal. Para su buen funcionamiento, el actuador debe contar con una resistencia a fricción mínima, un mantenimiento adecuado y una gran resistencia al desgaste. Los catálogos de los proveedores clasifican a los actuadores según la distancia total del desplazamiento que se desea obtener, el peso del espécimen a desplazar o rotar y la frecuencia en que se va a trabajar durante las pruebas. Ver Figura 2.4.
mesa vibratoria. La diferencia entre la fuerza que genera el actuador y la fuerza ejercida por el peso del modelo nos indicará la eficiencia con la que se desarrolla el sistema, es decir, entre mayor sea la potencia del sistema menos tiempo se demorará iniciar con grandes aceleraciones. El desplazamiento total del actuador indica el movimiento en una dirección determinada que presentará la mesa vibratoria y por consecuencia el desplazamiento que generarán las aceleraciones sobre los modelos. El desplazamiento normalmente se mide en milímetros (mm).
Figura 2.4 Actuador Hidráulico. [9]
Generalmente los actuadores están conformados por la base o pedestal, la servo válvula, la celda de carga y un pivote en uno o en los extremos del sistema. El ensamble del sistema debe ser orientado con gran precisión para evitar pérdidas en su comportamiento por fricción o por trabajar en una dirección no indicada. En actuadores de alta tecnología es necesario conectarlo a un sistema de adquisición de datos y/o controlador el cual proporcionará las funciones de desplazamiento que se requieren en la prueba y controlará su funcionamiento; así mismo se conecta a una bomba hidráulica que permitirá tener la presión suficiente para proporcionar el desplazamiento del pistón.
El sistema de distribución hidráulico tiene la finalidad de proporcionar la fuerza o presión suficiente para que el actuador genere el movimiento necesario sobre la mesa vibratoria. El tamaño del sistema de distribución indicará el nivel de fuerza que puede generar el sistema. Ver Figura 2.5.
Figura 2.5 Sistema de Distribución Hidráulico. [10]
2.1.3 Mesas vibratorias fabricadas en instituciones.
El diseño y la construcción de una mesa vibratoria es un proceso largo que requiere de conocimientos en el área de mecánica, ingeniería sísmica y sistemas constructivos, pero principalmente de grandes inversiones económicas, lo que provoca que en algunos casos sean factores que disminuyan su construcción por la mayoría de los laboratorios e universidades.
A continuación se muestran características de las mesas vibratorias construidas por algunas instituciones.
2.1.3.1 Mesa Vibratoria GwNsf.
The George Washington University Virginia Campus [11].
2.1.3.1.1 Descripción general.
El proceso de diseño y construcción inició en mayo del 2000 y se terminó para el mes de junio del 2001. Las dimensiones de la superficie de la placa de acero son de 10’ x 10’. Ver Figura 2.6.
Como característica principal se encuentran los seis grados de libertad: 3 Grados Traslacionales – en las dos direcciones de lado a lado (plano horizontal) así como movimiento vertical. 3 Grados Rotacionales – rotaciones en las dos direcciones y un giro torsional.
Figura 2.6. Mesa Vibratoria GWNSF. The George Washington University Virginia Campus
2.1.3.1.2. Estabilidad.
de concreto es la de estabilizar la mesa y evita que el movimiento sea transferido al edificio donde se encuentra la mesa vibratoria.
2.1.3.1.3. Movimiento.
El sistema de la mesa está formado por seis actuadores que aplican una "carga" que permite el movimiento de la mesa. El desplazamiento total de cada actuador es de aproximadamente 8 pulgadas, por lo tanto es el desplazamiento máximo que presenta la mesa en las seis direcciones permitidas. Los actuadores aplican las cargas dinámicas hasta de 80 kiloNewtons. Ver Figura 2.7 y 2.8.
Figura 2.7. Ubicación de actuadores en la plataforma.
Figura 2.8. Representación de los actuadores.
2.1.3.1.4. Potencia.
El movimiento del actuador sobre la mesa vibratoria se produce mediante un sistema hidráulico, el cual genera presión suficiente para originar los movimientos vibratorios necesarios.
El movimiento de los actuadores es a base de dos unidades hidráulicas que proporcionan 1,000 litros (260 galones) por minuto de aceite a 4,000 psi. ( libras / pulgadas cuadradas).
Cuando la bomba está encendida y la mesa vibratoria está funcionando, el aceite mueve los actuadores y el agua de 65°F circula para enfriar el sistema. (Ver figura 2.9)
Figura 2.9. Posición y tipo de movimiento del sistema mecánico del simulador.
2.1.3.2 Mesa Vibratoria Uniaxial Del Valle.
Laboratorio De Ingeniería Sísmica Y Dinámica Estructural (Linse). Departamento de Mecánica de Sólidos de la Universidad Del Valle, Colombia. [12].
2.1.3.2.1 Descripción general.
Figura 2.10. Fotografía del Simulador Sísmico
Un área de aproximadamente 120 m2 en el primer piso del Edificio 350 de la
Ciudad Universitaria Meléndez de la Universidad del Valle, Colombia, fue adecuada para instalar el simulador sísmico y demás equipos del Laboratorio de Ingeniería Sísmica y Dinámica Estructural. El simulador y su unidad de potencia hidráulica ocupan aproximadamente la mitad del espacio. En el espacio restante se encuentran los equipos de adquisición/análisis de datos, control y de monitoreo de salud estructural (Sistema de Adquisición de Datos). Los computadores del laboratorio están conectados al Internet mediante le red de Univalle para permitir la transmisión de datos.
2.1.3.2.2. Construcción Del Simulador Sísmico
plano perfectamente horizontal. Por lo tanto, para facilitar la nivelación de la placa de superficie se dispuso de una serie de pernos roscados en el pedestal.
Figura 2.11. Esquema general de la cimentación.
La placa de superficie es una estructura de placas de acero de 1" de espesor, en forma de caja invertida, que cubre el pedestal, y que tiene perforaciones en su parte superior que coinciden con la ubicación de los pernos de nivelación. Después de nivelar la placa de superficie, el espacio que quedó entre el pedestal de concreto y la placa de acero se rellenó con "grout" auto nivelante de alta resistencia y baja retracción. En la superficie de la placa de acero se instalaron tres monorrieles Schneeberger de baja fricción y los dispositivos de apoyo para el actuador hidráulico. La placa de aluminio se conectó a los monorrieles y al actuador hidráulico y éste, a sus apoyos. La placa de aluminio se perforó para instalar bujes roscados de acero de donde se conectan los modelos estructurales a la mesa. Ver Figura 2.12.
Figura 2.12. Fotografía del Simulador con Detalle de la Placa de Aluminio
2.1.3.2.3. Descripción del Sistema Hidráulico
barridos, movimientos aleatorios, y formas predeterminadas como registros de movimientos sísmicos.
2.1.3.2.4. Equipo Adicional
El laboratorio cuenta con un sistema de adquisición de datos de 16 canales de una terminal, y 8 canales diferenciales, con frecuencias de muestreo multicanal agregado de hasta 100 kMuestras/seg, y que opera bajo el software LabVIEW. Además, se cuenta con 8 acelerómetros sísmicos uniaxiales de bajo ruido y alta sensibilidad, 6 acelerómetros de aplicación general, filtros de paso bajo y amplificadores.
2.1.3.3 Mesa Vibratoria Uniaxial de la Universidad de Texas.
Simulador Sísmico Uniaxial del Laboratorio de Estructuras de La Universidad de Texas A&M, en el Estado De Texas. [13].
2.1.3.3.1 Descripción general.
En el diseño de esta mesa se contemplaron las dimensiones factibles del prototipo a utilizar y los factores de escalas más convenientes. Por practicidad y funcionalidad se determinó que un grado de libertad horizontal permitiría obtener resultados aceptables para la evaluación dinámica de diversas estructuras, pues en muchos casos el efecto dominante de un sismo corresponde a una sola dirección. Ver Figura 2.13.
Figura 2.13. Fotografía de la mesa vibratoria uniaxial Texas A&M.
2.1.3.3.2. Diseño de la Mesa Vibratoria
El desarrollo del diseño de la mesa vibratoria se hizo con base en un balance que permitiera obtener los desplazamientos en una dirección horizontal con una frecuencia aceptable y tener una capacidad de carga razonable a experimentos de esta índole.
Los elementos de la mesa son las placas de acero, así como las vigas que permiten darle la rigidez necesaria y la losa de reacción, sobre la cual estará anclada la mesa. Por la parte mecánica están los rieles y el sistema hidráulico, conformado por la bomba y el actuador. Ver Figura 2.14.
Figura 2.14. Actuador Hidráulico Uniaxial Texas A&M.
Debido a las características del proyecto, se necesitó verificar que la mesa vibratoria contara con la resistencia y rigidez suficiente para poder soportar las cargas dinámicas a las que estuviera sometida. Para evitar un posible efecto de resonancia de la mesa se revisó que las frecuencias fundamentales del sistema estuvieran por encima de 5 a 8 Hz que es el rango de frecuencias que comúnmente se presentan en los sismos. Por estas razones se realizó una modelación mediante elementos finitos para definir los elementos y sus dimensiones que permitieran a la mesa trabajar adecuadamente.
La mesa vibratoria consistió en una placa apoyada sobre perfiles W, los cuales se acondicionaron para deslizarse sobre un conjunto de rieles que ofrecieran la menor resistencia a fricción posible. Entre las características de la mesa se buscó que permitiera desensamblarse por lo que se optó por dividirla a la placa de la mesa en dos secciones rectangulares. En la conexión de los componentes se utilizaron tornillos con el mismo propósito de mantener la modularidad de la mesa.
Tabla 2.1 Materiales de la mesa vibratoria. [13]
Objeto Cantidad Dimensiones Tipo de Acero
Placa 2 4000 mm X 2000 mm X 12.7
mm
(13’-1½” X 6’-6¾’’ X ½’’)
A36
Perfil W10X33
3 4000 mm length
(13’-1½’’)
A992
Perfil W6X20
4 1800 mm length
(5’-11 5/8’’)
A992
Perfil L3X3X3/8
16 114.3 mm length
(4 ½ ’’)
A36
Placa base 6 1200 mm X 300 mm X 12.7
mm (4’ X 1’ X ½ ’’)
reducción del peso de la mesa vibratoria es del orden de una tercera parte y su rigidez no se ve afectada.
Con el fin de mantener al actuador trabajando en su máxima capacidad, se buscó un sistema que permitiera el desplazamiento horizontal con la menor resistencia a fricción. Como solución, se utilizaron rieles del tipo Danaher Linear Bearings, con capacidad de carga igual a 18.8 kN cada uno. El coeficiente de fricción de estos rieles es de 0.001 lo cual ofrece una durabilidad mayor del sistema evitando cambios por desgaste del bloque de almohadillas, el cual permite el desplazamiento. La selección de estos rieles también se debió a su larga vida útil, ya que está proyectada para 50 km de traslado el cual es generado con un máximo desplazamiento permisible del actuador de 15.2 cm. El desgaste de estos sistemas por prueba se espera mínimo. Entre las características de estos rieles está su tecnología de autoalineamiento, el cual compensa pequeños desalineamientos entre el bloque de almohadillas y el riel permitiendo una distribución de carga uniforme sobre el riel. [14]
Para facilitar el montaje y desmontaje de la mesa se optó por ensamblar los elementos estructurales utilizando tornillos de 2.54 cm de diámetro para unir las placas de acero a las vigas W10X33 y tornillos de 1.27 cm de diámetro para unir las vigas W6x20 con las W10X33 (Figura 2.15). De esta manera, tanto el montaje de los diferentes arreglos de los actuadores, como el uso de una o dos placas para tener una mesa de 200 cm x 400 cm o 400cm x 400 cm respectivamente, se hace de una manera sencilla. [14]
Figura 2.15. Conexiones entre perfiles.
2.2. Equipo de Laboratorio e Instrumentación.
En las pruebas experimentales se requiere contar con un equipo de laboratorio confiable y de un equipo de personal calificado para su uso. En el registro de resultados es necesario manejar instrumentación que cuente con la precisión necesaria para las características del proyecto. En pruebas estructurales dinámicas se debe de contar con equipo que permita grabar la información de desplazamiento, aceleraciones y esfuerzos en ciertos puntos del modelo. [15]
2.2.1 Transductores de desplazamiento variable lineal (LVDT)
el caso. La lectura de salida de voltaje será proporcional al desplazamiento aplicado al pistón.
La clasificación general de estos transductores se hace en cinco grupos, dividiéndose en: LVDT robustos (rugged), su uso es para pruebas de maquinaria donde se replica cada experimento un número considerado de veces y el rango de los desplazamientos oscila de 1.25 a 10 mm; LVDT de desplazamiento largo tipo AC y DC (long stroke), los primeros cuentan con mayor precisión y mejor comportamiento en las pruebas mientras que en los segundos su montaje es más sencillo, el rango de desplazamiento es de 15 a 300 mm para ambos; LVDT miniatura tipo DC, este equipo cuenta con cero fricción en el pistón para detectar el mínimo desplazamiento de éste y el rango de desplazamiento se encuentra entre 1 y 5 mm; LVDT de precisión, fabricados con equipo más sólido que permite un tiempo de vida más largo y su rango de desplazamiento varía de 1 a 5 mm [16]. Ver Figura 2.16.
Figura 2.16. Transductores de desplazamiento (LVDT). [16]
menos 6 pulgadas del equipo. Si sólo se fija en uno de los extremos de éste, se puede tener un error del 5% o mayor en la lectura. [16]
2.2.2 Acelerómetro
Este dispositivo está conformado por una masa determinada unida a un elemento piezoeléctrico para medir aceleraciones y vibraciones de algún objeto. La función de este equipo es la de recibir la fuerza de la masa generando así un voltaje que se traduce a la aceleración que percibe la masa. Este tipo de lectura se hace referente al eje del acelerómetro por lo que su dirección de colocación es importante. Existen acelerómetros de uno a tres ejes de dirección (Uniaxial, Biaxial y Triaxial), pudiendo este último medir la aceleración en tres componentes.
Figura 2.17. Acelerómetro Uniaxial. [17]
El funcionamiento de los acelerómetros se clasifica en pasivo y activo. Entre los primeros se encuentran los que envían la carga generada por el elemento piezométrico; siendo esta muy pequeña, requiere un amplificador para incrementar las señales recibidas. Los acelerómetros activos incluyen circuitos propios que convierten esta carga en una señal de voltaje por lo que requieren una fuente constante de corriente para alimentar a este circuito. [18]
2.2.3. Galgas Extensómetricas
Este dispositivo de medición trabaja registrando los cambios que se presentan en su resistencia. Está constituida por una serie de bobinas o cableado fino el cual al deformarse por estar unida al elemento en medición, se generará una variación en la resistencia que es proporcional a la deformación del elemento o pieza. La medición de estas deformaciones es respecto a la orientación del cableado, por lo que existen distintos arreglos o patrones de galgas. Existe la galga sencilla cuya medición se hace en un solo eje; la roseta de dos galgas que trabajan para hacer mediciones de deformación ortogonales entre sí; la roseta de tres galgas cuya orientación entre éstas es de 45 y 90º o de 60 y 120º [19]. Ver Figura 2.18.
Figura 2.18. Partes de una galga extensómetrica. [19]
Figura 2.19. Posición de una galga extensómetrica. [19]
La selección y colocación de la galga dependerá del tipo de material y prueba que se esté realizando. El uso más generalizado es para medir deformaciones en piezas metálicas. Cada galga cuenta con un factor de galga, que se representa su sensibilidad de elongación. Este factor se ve afectado por el nivel de impurezas que se almacenan durante su colocación y del rango de deformaciones que se presenten.
La colocación de la galga cuenta con un procedimiento muy específico, el cual si no se realiza adecuadamente produce errores en la lectura hasta dejar inservible este dispositivo. Para la colocación de una galga sobre una superficie metálica, se debe hacer la limpieza de la superficie quitando pintura, óxido y escoria utilizando una lija rugosa para después con una lija más fina suavizar la superficie para eliminar imperfecciones. Así mismo, se debe emplear en la limpieza sustancias que eliminen las grasas sobre la superficie.
soldando el cable cuidando de no cerrar el circuito con los puntos de soldadura y de no exponer demasiado tiempo al calor para no quemar la galga.
2.2.4 Sistema de Adquisición de Datos.
Un sistema básico de medición se conforma por el transductor, el acondicionador de señal y una unidad de grabado. El sistema de adquisición de datos se emplea para medir y registrar las señales obtenidas de los transductores. Los elementos que componen el sistema de medición son los transductores, algunos de éstos ya fueron descritos en las secciones anteriores y sirven para la conversión de cantidades físicas en señales eléctricas y el sistema de adquisición de datos, que es el acondicionador de señal, cuya función es la de ampliar, modificar o seleccionar ciertas partes de la señal recibida. Éste cuenta con un dispositivo de presentación visual; utilizado para el monitoreo de las señales de entrada y para la presentación de gráficas de las señales. Así mismo, el equipo cuenta con una memoria para el registro o grabación de estas señales ya acondicionadas. [20]
Figura 2.20 Sistema de Adquisición de Datos. Modelo PXI. [20]
2.3 Parámetros de Similitud y Semejanza.
En la experimentación, debido al costo y/o a la dificultad de realizar modelos a escala real, es necesario utilizar modelos reducidos por un factor de escala. Dichos modelos deben ser probados y analizados mediante leyes de similitud que dependen de las características físicas, mecánicas y geométricas del modelo.
2.3.1 Clasificación de modelos.
superposición se obtienen los resultados deseados; los modelos directos o de réplica real son similares al prototipo en todos los aspectos; los modelos de resistencia están constituidos por materiales que satisfacen las condiciones de similitud al llevarlos a la falla; los modelos de efecto eólico y dinámicos son aquellos que se utilizan para someterlos a estos tipo de carga.
La modelación de una estructura se realiza aplicando un factor de escala geométrico. La correcta selección de éste es importante, ya que utilizar modelos pequeños requerirá cargas bajas pero su inconveniente radica en la dificultad de su fabricación e instrumentación. Así mismo, un modelo de mayor escala requerirá equipos que proporcionen mayor carga. La tabla 2.2 muestra el rango del factor de escala geométrico para diversos elementos estructurales, en función del tipo de modelo a utilizar. [21]
2.3.2 Análisis Dimensional.
Según el tipo de prototipo que se desee analizar dependerán los requerimientos de similitud que se deban adoptar en la fabricación del modelo. Éstos se obtienen de un análisis dimensional basado en el teorema Pi (π) de Buckingham con relación a las dimensiones fundamentales como lo son la longitud, la fuerza (o masa), el tiempo, la temperatura y la carga eléctrica. [22].
El análisis dimensional parte del fundamento matemático de que cada ecuación o descripción de un fenómeno natural debe ser definido en una forma dimensionalmente homogénea. Un ejemplo de esto es la ecuación de la ley de Hooke que describe la relación esfuerzodeformación de un material.
Donde σ = Esfuerzo
E = Módulo de elasticidad del material ε = deformación unitaria
Tabla 2.2. Factores de escala geométricos para algunos elementos estructurales [21]
Tipo de estructura Modelo elástico Modelo de resistencia última
Cubierta cascarón 50 1 200 1 a 10 1 30 1 a
Puentes de carretera
25 1 4 1 20 1 a Tanque reactor 4 1 20 1 a 4 1 20 1 a Estructura viga/losa 25 1 4 1 10 1 a Presas 400 1 75 1 Efecto eólico 50 1 300 1
a No aplica
Puede observarse concordancia dimensional en esta misma ecuación al desarrollarla de acuerdo a sus dimensiones fundamentales como se muestra a continuación: ⎥ ⎦ ⎤ ⎢ ⎣ ⎡ ⋅ = long long k long fza k long fza
k1 2 2 2 3
Partiendo de esta premisa, se observa que la ecuación que está en función de n
0 ) ,..., ,
(X1 X2 Xn =
F (1)
Se puede expresar de la siguiente manera:
0 ) ,..., ,
( 1 2 n =
G π π π (2)
Siendo los términos π, los productos adimensionales de las n variables que
conforman el fenómeno en estudio. El subíndice m indica la diferencia existente
entre el número de variables de la ecuación y el número de dimensiones fundamentales (m=n−r) . Realizar este procedimiento es útil ya que permite
combinar las diferentes variables del problema mediante grupos o relaciones.
El teorema Pi de Buckingham establece que cualquier ecuación dimensionalmente homogénea que involucra cierto número de variables físicas puede reducirse a una ecuación equivalente utilizando una función de relaciones adimensionales. Debido a las características de algunos fenómenos, se implica una gran cantidad de variables por lo que se pueden determinar diversas combinaciones de términos adimensionales, lo cual no indica que sean erróneos algunos y otros correctos. Para poder tener un mejor manejo de las variables y formar de una manera sencilla y adecuada estos términos, se debe tener en cuenta el incluir todas las variables involucradas, dejar los términos adimensionales independientes entre sí y tener en cuenta que no va a haber necesariamente una sola combinación de estos términos. [23]
Es importante considerar que el utilizar variables que no son relevantes o el omitir algunas que son necesarias en descripción del fenómeno puede traer consecuencias negativas a la evaluación de éste.
2.3.3 Requerimientos de similitud en evaluaciones dinámicas.
La descripción de un problema dinámico está gobernada por la función de la fuerza respecto al tiempo. Los requerimientos de similitud entre el modelo y su prototipo para un problema de este tipo dependen de las propiedades geométricas y del material así como de las condiciones de carga que se apliquen, ya sean de vibración, impacto, viento o sismo.
La similitud entre los parámetros del modelo y del prototipo dependerá de las variables que se hayan fijado. Entre los casos más comunes está el de modificar la densidad de masa en los modelos de réplica real (los cuales emplean los mismos materiales y conservan las mismas propiedades geométricas) según el factor de escala adecuado. Algunas veces esto no es factible económicamente ya que al reducir la escala geométrica, la densidad de masa se incrementa según este factor, obteniendo así pesos de gran magnitud como en el caso de modelos de presas. Para este último caso, se mantiene constante la masa y el factor de escala se aplica sobre la aceleración mediante un análisis dimensional previo.
2.3.4 Relaciones del análisis dimensional
Para describir la relación entre velocidad, tiempo, desplazamiento, frecuencia y masa del prototipo y del modelo se requiere de un análisis dimensional. Los parámetros dimensionales fundamentales que son de relevancia en este proyecto se muestran en la Tabla 2.3.
El teorema Pi de Buckingham establece que una ecuación con n soluciones
puede expresarse como
(
, , ,)
0
o, en términos de m parámetros adimensionales, π,
(
1, 2, , m)
0G π π K π = (4)
m
= −
n
r
(5)
En las ecuaciones (3) a (5) n es el número de variables físicas, r es el número de unidades fundamentales involucradas y m es la diferencia entre ellas. En la Tabla
2.4 se muestran los exponentes de los parámetros relevantes involucrados en el problema.
En el análisis dimensional propuesto hay 13 variables físicas y 3 unidades fundamentales, por lo que el número de cantidades adimensionales, π, es 10. La respuesta bajo carga sísmica puede representarse por medio de la ecuación (6).
(
, , , , , , , , , , , ,)
0F Q E l σ ε ν a g t ρ ω δv = (6)
la ecuación (6) puede reescribirse como el producto de potencias definido por la ecuación (7).
a b c d e f g h i j k l
KQ E l a g t v
=
δ σ ε ν ρ ω (7)
En la que K es una constante de proporcionalidad. Al sustituir cada parámetro de la ecuación (7) por sus unidades fundamentales respectivas, obtenemos la ecuación (8).
2 2 2 2 4 1 1
( ) ( ) ( ) ( ) ( ) ( ) ( )
a b c d g h i j k l
L=F FL− L FL− LT− LT− T FTL− LT− T− (8)
Donde:
F = unidad de fuerza L = unidad de longitud T = unidad de tiempo
A fin de mantener congruencia en las dimensiones, los exponentes de cada unidad fundamental deben ser los mismos en ambos lados de la ecuación (8). Por lo tanto,
: 0
F = + + +a b d j (9)
: 0 2 2
T = − g− h+ + − −i j k l (10)
:
1
2
2
4
L
= −
b
+ −
c
d
+ + −
g
h
j
+
k
(11)
Se resuelven las ecuaciones en términos de a, i y c , los exponentes de las unidades fundamentales, se obtiene
a
= − − −
b
d
j
(12)2
2
i
=
g
+
h
− + +
j
k
l
(13)1 2 2 4
c = + b+ d − − +g h j −k (14)
Al sustituir estos términos en la ecuación (7), se obtiene la ecuación (15).
1 2 2 4 2 2
b d j b b d g h j k d e f g h g h j k l j k l
MQ
E l
a g t
v
δ
=
− − − + + − − + −σ ε ν
+ − + +ρ
ω
En la que M es una constante de proporcionalidad producto de la sustitución. Al agrupar los términos con el mismo exponente se obtiene la ecuación explícita (16) o la ecuación implícita (17).
( )
2 b 2 d 2 g 2 h 4 j k
l
El l at gt l tv
M t
l Q Q l l Qt l
⎡⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎤ ⎢ ⎥ = ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎝ ⎠ ⎢⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎥ ⎣ ⎦
δ σ εν ρ ω (16)
( )
2 2 2 2 4
0
b d g h j k
l
El l at gt l tv
G t
Q Q l l Qt l l
⎛⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞⎞ ⎜⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟ ⎜ ⎟⎟ = ⎜⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠ ⎝ ⎠⎟
⎝ ⎠
σ εν ρ ω δ (17)
Tabla 2.3. Dimensiones de los parámetros relevantes Fuerza Q Módulo de Elasticidad E Dimensión Lineal L Esfuerzo σ
F 2
F L L 2
F L
Aceleración a y g
Tiempo T Densidad ρ Desplazamiento δ 2
F T T 2 4
FT L L
T = unidad de tiempo, F = unidad de fuerza, L = unidad de longitud