Control Difuso Adaptable de Servomecanismos No
Lineales
M.C. Dora María Calderón Nepamuceno
Índice general
1. Introducción 1
1.1. Objetivo . . . 4
1.2. Reseña Bibliográfica . . . 4
1.3. Organización de la Tesis . . . 7
2. Lógica Difusa 9 2.1. Introducción . . . 9
2.2. Conjuntos Difusos . . . 10
2.3. Razonamiento Aproximado . . . 14
2.4. Variables Lingüísticas . . . 16
2.5. Proposiciones Difusas . . . 18
2.6. Reglas Difusas e Inferencia . . . 19
2.7. Fuzzyfication . . . 21
2.8. Defuzzyfication . . . 22
2.9. Control Difuso . . . 23
2.9.1. Tipos de Controladores Difusos . . . 25
2.10. Aproximación de una función utilizando LD . . . 27
2.11. Conclusiones . . . 35
3.2. Planteamiento del Problema . . . 39
3.3. Ley de Control Difusa Adaptable. . . 41
3.3.1. Análisis de Estabilidad . . . 44
3.4. Resultados Experimentales . . . 48
3.4.1. Plataforma de Experimentación. . . 48
3.4.2. Estudio Comparativo de un Controlador Proporcional Integral y el Con-trolador Adaptable Difuso Propuesto
.
. . . 593.5. Conclusiones . . . 65
4. Control Difuso de Sistemas No Lineales de Segundo Orden 67 4.1. Introducción . . . 67
4.2. Planteamiento del problema . . . 70
4.3. Ley de Control Difusa Adaptable. . . 71
4.3.1. Análisis de Estabilidad . . . 74
4.4. Resultados Experimentales . . . 78
4.4.1. Plataforma de Experimentación . . . 78
4.4.2. Estudio Comparativo de un Controlador Proporcional Derivativo con compensación utilizando parámetros conocidos y el Controlador Adapt-able Difuso Propuesto
.
. . . 974.5. Conclusiones . . . 101
5. Conclusiones 103 5.1. Trabajo Futuro . . . 104
A. Fundamentos Matemáticos 105 A.1. Operaciones con Conjuntos Difusos . . . 105
A.2. Relaciones Difusas . . . 107
A.2.1. Relaciones Clásicas . . . 107
A.2.2. Relaciones Difusas . . . 108
ÍNDICE GENERAL v
A.3. Estabilidad Uniforme Finalmente Acotada . . . 110
B. Plataforma de Experimentación. 113
C. Experimentos de control en velocidad utilizando como referencia una onda
cuadrada 115
Índice de
fi
guras
2.1. Funciones de Pertenencia más comunes. . . 13
2.2. Función de Pertenencia para una función seno. . . 15
2.3. Representación de los valores lingüísticos de la función seno. . . 17
2.4. Sistema de Control . . . 23
2.5. Esquema general de un Controlador Difuso . . . 24
2.6. Funciones de Pertenencia para la entrada x. . . 29
2.7. Funciones de Pertenencia para la entrada y. . . 30
2.8. Antecedentes . . . 32
2.9. Comparación de la función ideal y su aproximación . . . 35
3.1. Plataforma de Experimentación. . . 49
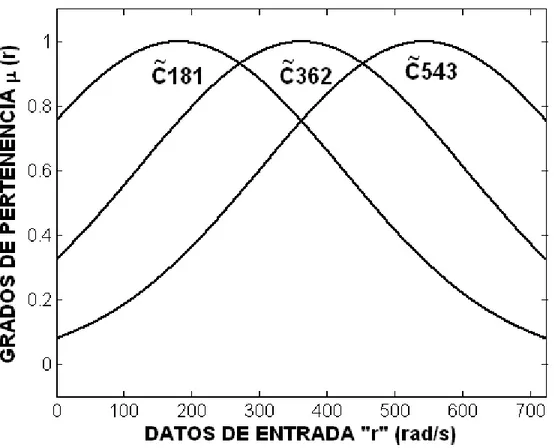
3.2. Funciones de Pertenencia de la velocidad r. . . 50
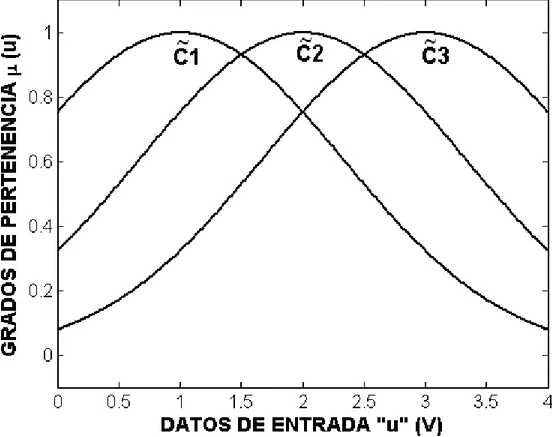
3.3. Funciones de Pertenencia del voltaje de control u. . . 51
3.4. Señal de Referencia y Salida . . . 55
3.5. Señal de Control . . . 56
3.6. Señal de Error . . . 57
3.7. Consecuencias de las reglas . . . 58
3.8. Comparación de la señales de velocidad sin filtrar. . . 60
3.9. Comparación de la señales de velocidad filtradas. . . 61
3.10. Comparación de los voltajes de control sin filtrar. . . 62
3.12. Comparación de la señales de error en velocidad filtradas. . . 64
4.1. Plataforma de Experimentación. . . 79
4.2. Funciones de Pertenencia de la posición velocidad r. . . 81
4.3. Funciones de Pertenencia de la velocidad r˙. . . 82
4.4. Funciones de Pertenencia del voltaje de control u. . . 83
4.5. Señal de referencia r y salida xen posición . . . 87
4.6. Señal de control en posición u. . . 88
4.7. Señal de error en posición e. . . 89
4.8. Consecuencias w.ˆ . . . 90
4.9. Término f(r,r˙) (línea punteada) ygˆ= (r,r, u˙ f) (línea sólida). . . 91
4.10. Señal de referencia r y salida xen posición . . . 92
4.11. Señal de control en posición u. . . 93
4.12. Señal de error en posición e. . . 94
4.13. Consecuencias w.ˆ . . . 95
4.14. Término f(r,r˙) (línea punteada) ygˆ= (r,r, u˙ f) (línea sólida). . . 96
4.15. Señal de referencia r y salida xen posición . . . 98
4.16. Señal de control en posición u. . . 99
4.17. Señal de error en posición e. . . 100
A.1. Estabilidad Uniforme Finalmente Acotado . . . 111
B.1. Diagrama de bloques asociada a la experimentación. . . 114
C.1. Referencia y salida en velocidad para los algoritmos difuso adaptable y PI con señal de referencia de onda cuadrada (sinfiltrar). . . 117
C.2. Referencia y salida en velocidad para los algoritmos difuso adaptable y PI con señal de referencia de onda cuadrada (filtradas). . . 118
ÍNDICE DE FIGURAS ix
C.4. Señal de control para los algoritmos difuso adaptable y PI con señal de referencia de onda cuadrada (filtradas). . . 120 C.5. Señal de error para el control difuso adaptable y el PI con señal de referencia
de onda cuadrada (sinfiltrar) . . . 121
Índice de Tablas
2.1. Implicaciones Difusas . . . 20
2.2. Centros y Anchuras de las Funciones de Pertenencia . . . 28
2.3. Valores Lingüísticos . . . 31
2.4. Base de reglas difusas . . . 31
2.5. Consecuentes de las Reglas . . . 33
2.6. Resultado de las Reglas . . . 34
3.1. Centros y Anchuras para la velocidad r y la señal de control u . . . 52
3.2. Valores Lingüísticos para el control en posición . . . 52
3.3. Reglas utilizadas en los experimentos para control en velocidad. . . 53
4.1. Centros y Anchuras para la posición r, velocidadr˙ y la señal de control u . . 80
4.2. Valores Lingüísticos para el control en posición . . . 84
Abstract
This work deals with adaptive fuzzy control of nonlinear uncertain first and second order
systems. The only a priory knowledge is an estimate of the gain affine to the control signal.
A fuzzy system approximates the unknown functions and an update law supplies estimates of its consequences. Stability is studied using the Lyapunov method, it is shown that the closed loop system is uniform ultimately bounded. A depart form existing approaches is the fact that the Lyapunov function employed for stability analysis allows to conclude that the size of the residual set is inversely dependent on the adaptation gain. Another depart form approaches encountered in the literature is the lack of supervisor switching terms in the
pro-posed control laws, thus chattering usually associated to these terms is completely avoided. Unlike other approaches, here, the desired trajectory and its time derivatives feeds the mem-bership functions, this eliminates a source of measurement noise entering to the closed loop system. Trajectory tracking of nonlinear servos in velocity and position modes serves as a test bed for the proposed control laws and real-time experiments allows to asses their practical applicability. In the case of velocity tracking, the proposed control law compares against a
Resumen
Este trabajo presenta el control difuso adaptable de sistemas no lineales de primer y segundo orden con incertidumbre. La única información que necesita conocerse es un estimado de la ganancia asociada a la señal de control. Se emplea un sistema difuso para aproximar las funciones desconocidas y la ley de adaptación estima y actualiza las consecuencias de las reglas. Se estudia la estabilidad del sistema en lazo cerrado mediante el método de Lyapunov, tal que,
se concluye que el sistema es Uniforme Finalmente Acotado. Una ventaja de este enfoque es el hecho de que la función de Lyapunov empleada para el análisis de estabilidad permite concluir que la región de convergencia es inversamente dependiente de la ganancia de adaptación. Otra ventaja de este enfoque es que no se utilizan términos supervisores de conmutación dentro de la ley de control, por consiguiente, el castañeo asociado a estos términos no existe. A diferencia de otros enfoques, en este trabajo la trayectoria deseada y sus derivadas alimentan a las
funciones de pertenencia, por lo consiguiente se elimina una fuente posible de introducción de ruido al sistema en lazo cerrado. El seguimiento de trayectoria de servomecanismos no lineales, para el control en velocidad y en posición, sirve para poner a prueba las dos leyes de control propuestas mediante experimentos en tiempo real, lo cual, permite evaluar su aplicación práctica. En el caso de control en velocidad, la ley de control propuesta se compara con un controlador Proporcional Integral más una prealimentación; para el caso de control
Capítulo 1
Introducción
El Control Automático juega un papel fundamental en los sistemas y procesos tecnológicos
modernos debido a los beneficios que se obtienen a través de su uso. Estos incluyen tanto
pro-ductos de mejor calidad como de menor consumo de energía, reducción de desechos, mayores niveles de seguridad y reducción de contaminantes. Es por ello que el Control Automático se ha vuelto parte importante en los procesos industriales modernos y de manufactura, en aplicaciones espaciales y en Robótica por mencionar algunos.
En estas aplicaciones, la estructura de los sistemas físicos que se quieren controlar es
incierta. Entre otras dificultades se pueden mencionar las dinámicas no modeladas, las no
linealidades asociadas tanto al sistema como a las incertidumbres, las perturbaciones y los cambios en los parámetros. Un caso interesante y el cual incluye este tipo de características es el control de motores de Corriente Directa (CD) con referencias variantes en el tiempo. Este aspecto es de gran importancia ya que este tipo de motores son utilizados como elementos de posicionamiento angular además de ser ampliamente utilizados en la industria. Podemos
Con el fin de controlar estos sistemas, es necesario su conocimiento y comprensión ade-cuados. Una de las vías que permite llegar a dicha comprensión es el modelado matemático.
El modelo se define generalmente a partir de un conjunto de ecuaciones diferenciales que
aproximan la dinámica real del sistema a controlar. Los modelos matemáticos deben ser lo
suficientemente simples para poder ser analizados con los métodos disponibles y su precisión
debe ser suficiente para describir el comportamiento dinámico del sistema. Dentro del
mode-lado se puede incluir algunas de las incertidumbres asociadas a los procesos reales que se han mencionado anteriormente.
A partir de un modelo matemático se pueden aplicar técnicas convencionales de
con-trol clásico como el Concon-trol Proporcional-Integral (P I) o el Control
Proporcional-Integral-Derivativo (P ID) que son ampliamente utilizadas en el control de procesos. Este tipo de
controladores, al ser aplicados a sistemas que incluyen las dificultades arriba mencionadas,
encuentran rápidamente sus limitaciones ya que no son capaces de adaptarse a los cambios e incertidumbres sufridas por los procesos. Es aquí donde las técnicas de control moderno avan-zan un paso más hacia la solución del problema de control de sistemas que incluyen este tipo
de dificultades. Entre otras técnicas el Control Óptimo y el Control Robusto, si bien mejoran
el desempeño, en contraparte, requieren de mayor información disponible sobre el sistema a controlar como es el conocimiento de cotas en los parametros del sistema o de algunas carac-terísticas que deben cumplir sus modelos como son la linealidad o la diferenciabilidad. Otra técnica es el Control Adaptable Clásico que ofrece resultados interesantes aún cuando se des-conozcan los parámetros del sistema. Sin embargo, el diseño de este tipo de controladores es complicado ya que es necesario realizar tanto la estimación adecuada de los parámetros del
sistema así como la estabilidad del lazo de control. Además, requieren del conocimiento de la estructura de las no linealidades que se desean compensar.
En contraste con las técnicas mencionadas anteriormente existen otro tipo de metodologías
llamadasinteligentes que no se basan en un modelado matemático detallado para su puesta
en funcionamiento. Entre estas técnicas podemos mencionar a las Redes Neuronales, a los Algoritmos Genéticos, a la Programación Evolutiva y a la Lógica Difusa. Estos enfoques se
3
desempeño y para adaptarse a nuevas situaciones de operación del sistema.
El Control Difuso es empleado en procesos donde su modelo matemático no se conoce con detalle y en donde existe un buena comprensión basada en la experiencia de un operador humano. Las leyes de control se estructuran a partir de una colección de sentencias difusas
de tipo si −entonces. Al incluir un algoritmo de adaptación o de aprendizaje, un sistema
difuso convencional se convierte en un sistema difuso adaptable. La ventaja principal de un controlador difuso adaptable en contraste con un controlador adaptable clásico, es el hecho
que es capaz de incluir información difusa lingüística.
Los modelos dinámicos utilizados en esta tesis son de primer orden para el caso de control de velocidad y de segundo orden para el caso de control de posición, que son aplicaciones básicas en el ambito industrial, ambos aplicados a un motor de CD. Es necesario subrayar que las referencias que se utilizarán en el presente trabajo son variantes en el tiempo las cuales complican aún más el problema de control. Al presentarse experimentos sobre un prototipo de
laboratorio las leyes de control se evaluan bajo condiciones no ideales como son las dinámicas no modeladas o ruidos de medición.
La solución que se propone al problema de control se lleva a cabo compensando los términos no lineales presentes en los modelos empleando un sistema difuso adaptable. Las características innovadoras del enfoque propuesto son:
1) La compensación adaptable difusa se realiza utilizando información de la señal de control y la señal de referencia.
2) El esquema de compensación es estudiado mediante una prueba de estabilidad rigurosa en el sentido de Lypaunov.
3) Se incluyen resultados experimentales en tiempo real que validan al esquema sobre
1.1.
Objetivo
La presente tesis se centrará en proponer leyes de control para sistemas no lineales de primer orden y segundo orden con incertidumbres utilizando lógica difusa. Las leyes propuestas son
aplicadas para el control de velocidad y posición de motores de CD con referencias variantes en el tiempo. El diseño de la ley de adaptación se realiza mediante el análisis de estabilidad basado el método de Lyapunov demostrándose Estabilidad Uniforme Finalmente aAcotada. El desempeño de la ley de control propuesta es validado a nivel experimental en prototipos de laboratorio comparándose el desempeño de los controladores propuestos con leyes de control no difusas.
1.2.
Reseña Bibliográ
fi
ca
Después de una amplia revisión, aquí se presentan solamente los trabajos que tienen una
relevancia significativa en relación al tema de investigación. Cabe mencionar que uno de los
criterios fundamentales que se utilizó para situar el presente trabajo en relación a otros fue la hipótesis acerca de las incertidumbres. Efectivamente, la mayoría de los esquemas que se encontraron en la literatura requieren de un conocimiento total, parcial o de alguna cota de
las incertidumbres. Con el fin de presentar los distintos trabajos, la reseña se centra en los
siguientes aspectos puntuales: el orden del sistema, la estructura de la ley de control, la prueba
de estabilidad, las hipótesis y finalmente el tipo de experimentos realizados.
Li-Xin Wang [49] diseña un controlador adaptable difuso directo para sistemas no lineales
den-ésimo orden. La ley de control está constituida por un control supervisorio y un control
difuso. La estabilidad del sistema es estudiada mediante la teoría de Lyapunov tanto para la parte de control supervisorio como para la parte difusa y de manera separada; de aquí se
1.2 Reseña Bibliográfica 5
Otra desventaja que presenta este controlador es que se debe conocer información del sistema, que no es fácil de obtener en la práctica, es decir, la cota superior de la función no lineal
junto con la cota de la incertidumbre del sistema. Este trabajo es probado solamente a nivel simulación en un sistema inestable y en un sistema caótico obteniéndose buenos resultados en el sentido de garantizar estabilidad uniformemente acotada.
Yonggon Lee et al [24] diseñan un controlador adaptable difuso uniformementefinalmente
acotado para sistemas no lineales de n-ésimo orden. Este controlador consta de dos
compo-nentes, uno adaptable y uno robusto, cuyos objetivos son la de nulificar los efectos de las
incertidumbres y lograr un comportamiento de seguimiento deseado. La estabilidad del sis-tema en lazo cerrado es validada mediante la teoría de Lyapunov. Es importante destacar que la ley de adaptación es obtenida mediante la propiedad de proyección de los conjuntos
difusos(ver apéndice A). La principal desventaja de este controlador es que se deben conocer
las cotas inferiores de las funciones no lineales así como las cotas superiores e inferiores de las consecuencias de las reglas, restringiéndose así la aplicación práctica de dicho controlador. La ley de control propuesta es probada a nivel de simulaciones númericas en un péndulo invertido.
Chun Yi Su y Yury Stepanenko [39] diseñan un controlador difuso adaptable para sistemas
no lineales den-ésimo orden. La ley de control propuesta consta de tres partes, una parte de
retroalimentación lineal, una de control por modos deslizantes y una de control difusa donde esta última es la que se utiliza para estimar la función no lineal desconocida del sistema. Realizan pruebas de estabilidad del controlador en el sentido de Lypaunov sólo para las partes
de control deslizante y control difuso por separado. No se especifica si las leyes de adaptación
se obtuvieron en dicho análisis. La desventaja principal es que deben conocer los parámetros
del sistema además de la posibilidad de existencia de castañeo debido al empleo de técnicas
de modos deslizantes. Se tiene como ventaja principal su uso para sistemas den-ésimo orden.
Marios M. Polycarpou [33] propone una ley de control de tipo neuronal adaptable. La metodología de diseño es aplicable para una clase sistemas no lineales de segundo orden y así
como para sistemas den-ésimo orden. La estabilidad del sistema es validada mediante la teoría
de Lyapunov de donde se obtiene la ley de adaptación. Esta ley requiere del conocimiento de las cotas de la función no lineal para la reconstrucción del error de la red neuronal. La metodología garantiza estabilidad semiglobal uniformemente acotada. La caracteristica principal es que los autores suponen que la función no lineal del sistema está compuesta de dos partes, una función suave conocida y otra que representa la incertidumbre del sistema. La principal ventaja es que
esta metodología se puede aplicar a sistemas den-ésimo orden. La ley de control no es probada
en experimentos, ni en tiempo real ni en simulaciones.
Jeffrey T. Spooner y Kevin M. Passino [38], diseñan controladores adaptables directos
e indirectos basados en conjuntos difusos para sistemas no lineales de n-ésimo orden. La
ley de control adaptable indirecta está comprendida por un término de control acotado, un término de tipo de modos deslizantes y un término de control equivalente. La ley de control adaptable directa está comprendida por un término de control acotado, un término de tipo modos deslizantes y un término de control adaptable. La estabilidad del sistema para ambas
leyes de control es estudiada mediante la teoría de Lyapunov. La desventaja de esta propuesta es que se supone que las referencias son constantes restringiéndose la aplicación de dichos
controladores. Una ventaja radica en el hecho de su uso para sistemas de n-ésimo orden. La
ley de control es probada a nivel de simulación númerica para el control de distancia de un automóvil en un camino automatizado.
En los diversos trabajos aquí mencionados se proporcionan soluciones diversas para el problema de control, cada uno con una estructura de la ley de control que son diferentes entre si. Los resultados presentados en cada uno de ellos son aceptables en términos de estabilidad.
1.3 Organización de la Tesis 7
númerica únicamente.
En contraste, en esta tesis se proponen leyes de control compuestas de una parte lineal
clásica más una parte adaptable difusa, ésta última se encarga de compensar el término no lineal presente en el modelo y la incertidumbre en la ganacia asociada a la señal de control. Las leyes de control que se proponen son estudiadas mediante el método de Lyapunov, donde se desconoce por completo el término no lineal y existe incertidumbre en los parámetros del modelo.
1.3.
Organización de la Tesis
El material de la presente tesis está organizado como sigue. En el segundo capítulo se introducen los conceptos básicos de Lógica Difusa y Control Difuso que permiten a su vez introducir algunos principios básicos de Lógica Difusa así como la notación empleada en este
Capítulo 2
Lógica Difusa
2.1.
Introducción
El objetivo de este capítulo es definir conceptos básicos de la Lógica Difusa (LD). Para
ello se deben introducir aspectos generales referente a cómo surge esta teoría. En las secciones
siguientes se definen los conceptos de conjuntos difusos, razonamiento aproximado, variables
lingüísticas y reglas de inferencia, para comprender de manera más sencilla los principios del
control difuso.
Se considera que el concepto de lógica difusa(LD)fue propuesto en 1965, en la Universidad
de California en Berkeley, por LotfiA. Zadeh [54], quien combinó los conceptos de la lógica y
de los conjuntos de Lukasiewicz mediante la definición de grados de pertenencia.
Así, la Lógica Difusa ha cobrado una gran fama por la variedad de sus aplicaciones las cuales van desde el control de procesos industriales complejos hasta el diseño de dispositivos
artificiales de deducción automática, pasando por la construcción de artefactos electrónicos de
Aunque en principio la lógica difusa encontró una fuerte resistencia entre la comunidad
científica, algunos investigadores se convirtieron en seguidores de las teoría de Zadeh, y
mien-tras él siguió ampliando y asentando los fundamentos de la teoría de los conjuntos difusos, los investigadores exploraron estas nuevas teorías durante la década posterior a su nacimiento. Además de las contribuciones del propio Zadeh, otros investigadores como Bellman, Goguen, Kohout, Smith, Sugeno, Chang y Duna entre otros, hicieron aportaciones al desarrollo de las bases de esta teoría. Esta fase temprana también está marcada por una necesidad fuerte de distinguir la lógica difusa de la teoría de probabilidad que se encarga de los diferentes tipos
de incertidumbre. La próxima fase del desarrollo de la disciplina se manejo por el éxito tenido particularmente en Japón, el cual consistió en usar la lógica difusa en controladores simples.
En la siguiente sección se introducen algunos de los fundamentos básicos de la lógica difusa, el control difuso y se definen los términos f uzzyf ication ydef uzzyf ication.
2.2.
Conjuntos Difusos
El concepto de un conjunto es una de las nociones más fundamentales de la Matemática. La Teoría de Conjuntos se fundó por el matemático alemán George Cantor (1845-1918) [8]. Un
conjunto clásico es una colección de objetos de cualquier clase el cual se especifica totalmente
por los elementos que contiene, es decir, si X es un conjunto, entonces “x∈X” significa que
x es un elemento del conjunto X y“x /∈X” significax que no pertenece al conjunto X.
Un conjunto clásico X en un universo de discurso U se puede definir de varias formas:
enumerando los elementos que pertenecen al conjunto, especificando las propiedades que deben
cumplir los elementos que pertenecen a ese conjunto, es decir, por medio de un predicadoP(x),
lo cual significa que cada elemento x del conjunto X tiene una propiedad P. Una tercera
definición de un conjunto X es la utilización de su función característica μX, que permite
2.2 Conjuntos Difusos 11
Definición 1 μX : x → [0,1] es una función característica del conjunto X si y solo si para toda x
μX(x) =
(
1 0
x∈X
x /∈X (2.1)
La función característica de un conjunto difuso asigna un valor entre 0 y1a cada uno de
los elementos del conjunto universal (o conjunto de discurso que contiene todos los elementos posibles que conciernen a cada contexto en particular o aplicación). Esta función puede ge-neralizarse de tal manera que los valores asignados a los elementos del conjunto de discurso se
encuentren dentro de un rango específico e indiquen el número de miembros de estos elementos
en el conjunto de discurso. Los valores grandes (cercanos a1) denotan los grados más altos de
pertenencia del conjunto. Tal función se llama“f uncion de pertenencia´ ” (F P)y el conjunto
definido por ésta“conjunto dif uso” [9]. El rango normalmente usado de valores de funciones
de pertenencia es el intervalo [0,1]. En este caso, cada función de pertenencia mapea los
elementos del conjunto universal U, dentro los números reales[0,1]. El conjunto que se define
con base en una función de pertenencia se le da el nombre de conjunto difuso1.
Definición 2 La función de pertenencia μA˜ de un conjunto difuso A˜ es una función
μA˜ :U →[0,1]
Así, cada elementoxdeU tiene un grado de pertenenciaμA˜(x)∈[0,1].A˜está completamente
determinada por el conjunto de duplas
˜
A={(x, μA˜(x))|x∈X} (2.2)
1En la Teoría de la Lógica Difusa los conjuntos no difusos son llamados conjuntos crisp y sus elementos
o valores son llamados, de igual manera, valorescrisp, y de este modo se hace referencia a dichos conjuntos
Según la notación, el símbolo del conjunto difuso ³A˜´ es distinguido por su función de pertenenciaμA˜ [20]. Así, cada elementox∈U tiene un grado de pertenenciaμA˜(x)∈[0,1]el
cual es completamente determinado por el conjunto de duplas definido en la ecuación (2.2).
El grado de pertenencia se cuantifica mediante la función de pertenencia μA˜ como sigue:
i) Si μA˜(x)indica el grado de pertenencia dexal conjuntoA˜, entonces:μA˜(x)toma valores entre0 y1.
ii) SiμA˜(x) = 1, x pertenece totalmente aA.˜ iii) SiμA˜(x) = 0, x no pertenece aA˜
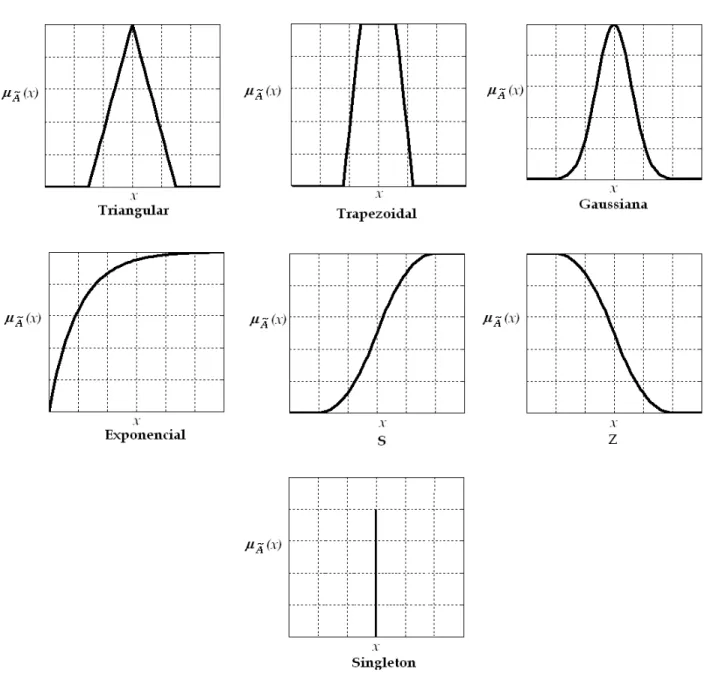
Existen diferentes formas que puede tomar una función de pertenencia. Las más empleadas
se presentan en lafigura (2.1). Aquí solo se describirá la función de pertenencia Gaussiana ya
que es la se utilizará a lo largo del desarrollo de esta tesis.
Una función de pertenencia Gaussiana se especifica con dos parámetros {c, σ}; donde c
representa el centro de la función de pertenencia y σ determina su anchura
gauss(x,{c, σ}) =e
−12
µ x−c
σ ¶2
2.2 Conjuntos Difusos 13
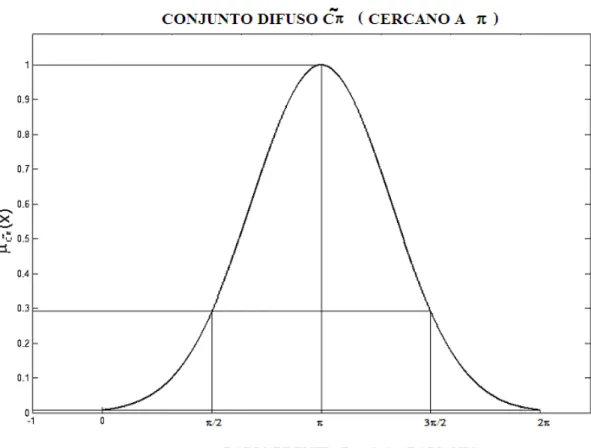
Ejemplo 1 Supóngase que se desea describir la función sin(x), cuando la variable x toma valores cercanos aπ. Utilizando un conjunto difuso con los elementos¡x, μCπf (x)¢, se proponen las siguientes duplas
f Cπ=
½
(0, 0.072),³π
2, 0.291
´
,(π,1), µ
3π
2 , 0.291
¶
,(2π, 0.072), ¾
(2.4)
es decir, el punto 0 tiene un grado de pertenencia de 0.072, el punto π
2 de 0.0291, el punto
π de 1, etc.. Para este ejemplo se utilizó una FP Gaussiana con centro en π y anchura 1 la cual es obtenida utlizando la ecuación (2.3), y se ilustra en la figura (2.2). Si el valor de x es menor a cero o mayor a 2π, entonces, el grado de pertenencia es cero ya que no está dentro del rango de la variable que se quiere describir, es decir, no está cerca de π.
2.3.
Razonamiento Aproximado
El Razonamiento es la habilidad de inferir información sobre alguna faceta desconocida de un problema a partir de la información disponible [51], por ejemplo, cuando un sistema falla, se intenta descubrir por qué ha fallado observando los síntomas.
En las tareas de ingeniería es habitual el uso de técnicas que requieren razonamiento. La
Teoría del Razonamiento Aproximado permite representar también cuantificadores lingüísticos
2, ésto facilita representar enunciados como “la mayor´ıa de los coches lujosos son caros”
o “bastantes electores votar´an en blanco”. Zadeh [54] indicó que un cuantificador como “la mayor´ıa” puede ser representado como un conjunto difuso sobre un universo de discurso. Los
cuantificadores aproximados se usan para representar al sentido común.
2.3 Razonamiento Aproximado 15
2.4.
Variables Lingüísticas
La unidad de representación fundamental del conocimiento en el razonamiento
aproxima-do es la noción de variable lingüística. Una variable lingüística es aquella cuyos valores son
palabras o sentencias descritas en un lenguaje natural o artificial. Por ejemplo, la edad es una
variable lingüística si sus valores son lingüísticos más que numéricos, es decir, joven, no tan joven, muy joven, bastante joven, viejo, no muy viejo, etc., más que valores numéricos como 21 años, 22 años, 23 años, etc.
En el razonamiento aproximado es usual tener la siguiente estructura asociada con la noción de variable lingüística
hX;LX;DX;MXi. (2.5)
Donde :
X denota la variable lingüística, por ejemplo, la edad, temperatura, altura, etc.,
LX es el conjunto de los valores lingüisticos que puede tomar la variable X. (Un valor
lingüistico denota un símbolo para una propiedad en particular de X).
DX es el dominio sobre el cual la variable lingüísticaX toma sus valores cuantitativos.
MX es una función semántica que proporciona una interpretación del valor lingüístico en
términos de los elementos cuantitativos de DX,es decir
MX :LX →X,˜ (2.6)
donde :
˜
2.4 Variables Lingüísticas 17
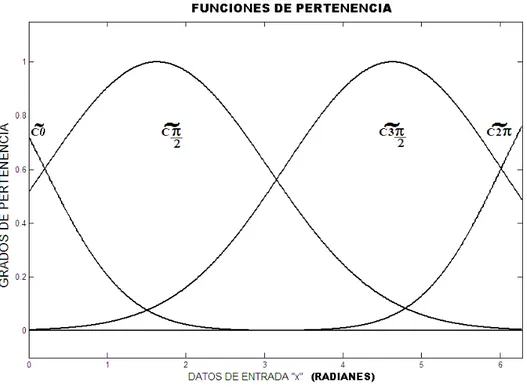
Ejemplo 2 Siguiendo el ejemplo (1) se define la variable lingüística X que puede tomar los siguientes valores lingüísticos:
Lx =
½
Cercano a Cero (C0), Cercano a π
2
³ Cπ
2
´
, Cercano a 3π
2
µ C3π
2
¶
,Cercano a 2π (C2π)
¾
El dominioDX es aquel donde la variable lingüística X toma valores en el intervalo[0,2π]. La
función semántica MX, que proporciona una intrepretación del valor lingüístico en términos
de los elementos cuantitativos de DX, define los conjuntos difusos descritos en lafigura3 (2.3).
Figura 2.3: Representación de los valores lingüísticos de la función seno.
3Si un mismo elemento tiene dos grados de pertenencia, se podrá utilizar la T-norma o la T-conorma (ver
2.5.
Proposiciones Difusas
El razonamiento aproximado se usa para las operaciones de representación y razonamiento
utilizando conocimiento expresado en Proposiciones Atómicas, las cuales son expresadas en
un lenguaje natural.
La información puede expresarse en forma de sentencias o proposiciones atómicas de la
forma:
“X es A”
donde X es el nombre de un objeto (atributo, hecho...) yA es el valor que toma este objeto.
Las Proposiciones Atómicas pueden tomar valores de verdad dentro de un conjunto definido de valores posibles. Esto implica la existencia de distintas lógicas, clasificadas por el número de valores de verdad posibles: lógicabivaluada (two-valued logic), trivaluada (three-valued logic). Las proposiciones con atributos imprecisos conllevan al uso de lógica multivaluada o lógica
difusa (fuzzy logic) [10].
La diferencia fundamental entre las proposiciones clásicas y las proposiciones difusas está en el rango de sus valores de verdad. Mientras que las proposiciones clásicas corresponden a la lógica bivaluada (verdad o falsedad), las proposiciones difusas corresponden a la lógica multivaluada, es decir, existen grados de verdad o falsedad. Asumiendo que los valores verdad y falsedad son expresados por los valores 1 y 0, respectivamente, el grado de verdad de cada
proposición difusa se expresa por un número en el intervalo [0,1].
Con base en la notación de proposiciones difusas atómicas y conectores lingüístico tales como“y”, “o”,“no”, y“si-entonces”, se pueden formar proposiciones difusas complejas,
X es A y X es B, X es A o X es B,
X no es A,
(X es A y X no es B) oX es C, si X es A entonces X es B, etc.
2.6 Reglas Difusas e Inferencia 19
de los conectores “y”, “o” y “no”, como “conjunción”, “disyunción” y“negación”,
respecti-vamente.
2.6.
Reglas Difusas e Inferencia
Las reglas son un modo de representar estrategias o técnicas cuando el conocimiento
proviene de la experiencia o de la intuición y usan conectores lingüisticos SI—ENTONCES
(IF—THEN):
SI< antecedente o condicion >´ ENTONCES < consecuente o conclusi´on >
SIx es LX ENTONCESy es LY (2.7)
Lo que se busca es una relación difusa R˜ cuya función de pertenencia exprese el grado
de verdad de “SI x es LX ENTONCESy es LY”. A esta acción se la denomina “implicar”,
y hay muchas formas de hacerlo que más adelante se explicarán. Implicar es el paso previo a “inferir”, que consiste en extraer una conclusión a partir de la relación generada por la
implicación y de un conjunto difuso de entrada “x es LX”= ˜X . Dicha conclusión es un nuevo
conjunto difuso “y es LY”= ˜Y.
En otras palabras, el enunciado (2.7) se interpreta como una relación difusa definida en
tres etapas:
1.- Antecedente, parte posteriorSI y anterior a EN T ON CES
“xes LX” se interpreta con el conjunto difuso
˜
X= X
x∈X
μX˜ (x)/x (2.8)
donde el operador “/” denota una dupla y los elemento a sumarse son la grados de
2.- Consecuente, parte posterior aEN T ON CES
“y esLY” se interpreta con el conjunto difuso
˜
Y =X
y∈Y
μY˜ (y)/y (2.9)
3.- CondicionanteEN T ON CES, se interpreta a partir de la relación difusa
˜
R = X
(x,y)∈X×Y
μR˜(x, y)/(x, y) (2.10)
conμR˜(x, y) =μX˜ (x)∗μY˜ (y) donde ∗es un operador de implicación difusa.
A todo este proceso se le denomina inf erencia.
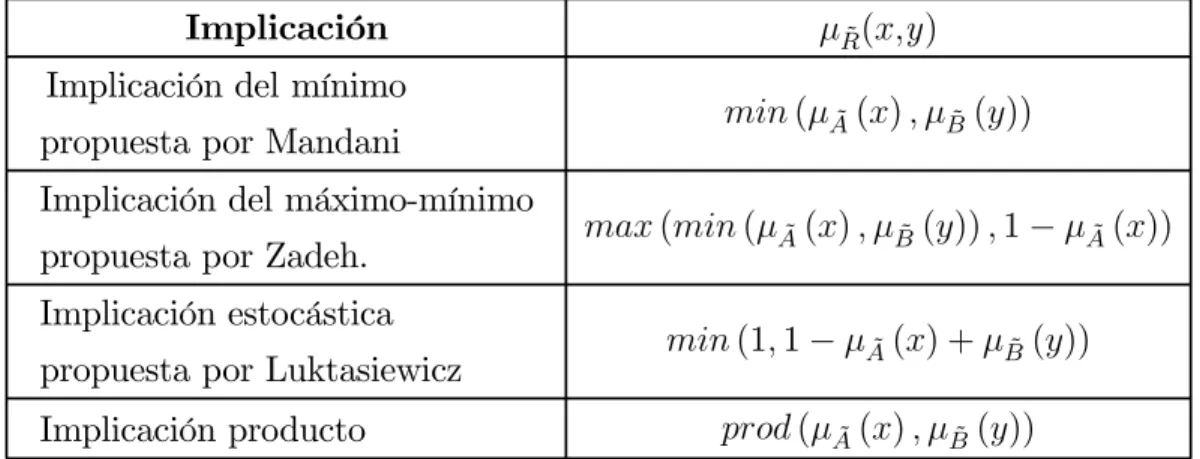
Implicaciones difusas
SeaA˜,B˜conjuntos difusos yR˜una relación difusa, existen varios operadores de implicacion difusa. En la tabla (2.1) se presenta los más utilizados:
Implicación μR˜(x,y)
Implicación del mínimo
propuesta por Mandani min(μA˜(x), μB˜(y))
Implicación del máximo-mínimo
propuesta por Zadeh. max(min(μA˜(x), μB˜(y)),1−μA˜(x))
Implicación estocástica
propuesta por Luktasiewicz min(1,1−μA˜(x) +μB˜(y))
Implicación producto prod(μA˜(x), μB˜(y))
2.7Fuzzyfication 21
2.7.
Fuzzy
fi
cation
La fuzzyfication, codificación, traduce a valores difusos los valores de las variables de
en-trada por ejemplo de un controlador. La función de la fuzzyfication más simple es la tipo
“singleton”, es decir, el valor crisp será el único valor del conjunto difuso(verfigura 2.1) [8]:
Singleton: Asociación entre un valor crisp x y un conjunto difusoA,˜ es decir, el conjunto difuso solo tendrá un solo grado de pertenencia.
μA˜(x’) =
½
1 0
x=x’
x6=x’
donde x’ es el valor actual de entrada.
No singleton: el grado de pertenencia disminuye según se separa del punto x, por ejemplo para la función de pertenencia del tipo gaussiana se tiene
gauss(x,{c, σ}) =e
−1
2
µ x−c
σ ¶2
Ventajas de la fuzzyfication
La fuzzyfication permite minimizar posibles cambios pequeños en las variables de
entra-da. Por ejemplo, si se miden 25oC de temperatura, ésta puede variar mientras se efectúa la
inferencia, por lo que puede ser más conveniente considerar que la temperatura es
“aproxi-madamente 25oC”. Tambien permite minimizar los posibles errores al adquirir los datos asi
como suavizar el comportamiento del sistema ampliando el rango de la variable, es decir, se
mide una temperatura de 25◦C lo cual puede indicar caliente, un valor cercano a 25oC puede
indicar casi caliente de tal forma que puedan considerarse valores cercanos a 25◦C dándoles
2.8.
Defuzzy
fi
cation
Ladefuzzyfication convierte los valores difusos de las variables de salida en valores concretos dentro del universo de discurso correspondiente. Es decir, genera una acción no difusa a partir
de la acción difusa resultante del sistema de inferencia.
Supongamos que tenemos M reglas difusas del tipo: SI x es LX ENTONCES y es LY,
donde si se introducen valores de entrada x = (x1, x2,· · · , xn,· · ·xN)T , se obtienen como salida un conjunto asociado a todas las reglasy˜= (˜y1,y˜2,· · ·y˜m,· · ·y˜M)T.
La asociación del conjunto difuso y˜ y el valor crisp y = (y1, y2,· · · , yn,· · ·yN)T es la
defuzzyfication donde μy˜(yn) es el grado de pertenencia del valor de entrada actual para la
m-esima´ regla y el operador “·” indica el producto escalar. (ver ec. (2.11) y (2.12) )
Existen diversos métodos de defuzzyfication, a continuación se presentan los dos más
uti-lizados:
Centro de gravedad
y∗ =
N
P
n=1
yn·μy˜(yn) N
P
n=1
μy˜(yn)
(2.11)
Centro de sumas
y∗ =
N
P
n=1
yn· M
P
m=1
μwm(yn)
N
P
n=1 M
P
m=1
μwm(yn)
(2.12)
2.9 Control Difuso 23
2.9.
Control Difuso
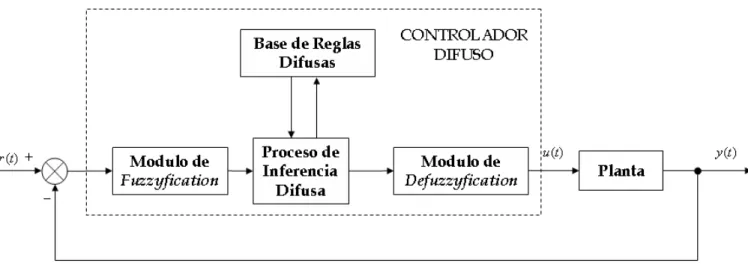
Un sistema de control básico se muestra en lafigura(2.4). El proceso (o planta) es el objeto a ser controlado, la entrada es u(t) y la salida es y(t), y la entrada de referencia es r(t)[31].
Controlador
Planta
( )
r t + u t
( )
y t( )
−
Figura 2.4: Sistema de Control
La Teoría de Control convencional proporciona numerosos métodos para la construcción de controladores para sistemas dinámicos. Pero en forma general, no proporcionan ningún método para el diseño de controladores difusos ya que éstos se basan en el principio de la experiencia y aprendizaje, en consecuencia, lo que se podría obtener con la ayuda de la teoría clásica sería una base de datos para conocer el comportamiento del proceso en caso de que se
tuviera su modelo.
En general, los controladores difusos son sistemas expertos que emplean el conocimiento como fundamento, expresado en términos de reglas difusas y de un proceso de inferencia para resolver un problema de control dado [31]. Como se mencionó anteriormente, los controladores difusos, a diferencia de los controladores clásicos, son capaces de utilizar el conocimiento obtenido de operadores humanos. Mientras este conocimiento es complicado de expresar en
Un controlador difuso está formado por cuatro módulos: una base de reglas difusas, un
proceso de inferencia de reglas, un módulo denominado fuzzyfication y uno denominado
de-fuzzyfication. Las interconexiones entre estos módulos y el proceso principal son mostradas en la figura (2.5).
Figura 2.5: Esquema general de un Controlador Difuso
Un controlador difuso opera por repetición de un ciclo formado de los siguientes cuatro pasos:
1.- Se realizan las mediciones de todas las variables que representan condiciones relevantes del proceso controlado.
2.- Las mediciones son convertidas en conjuntos difusos apropiados para expresar mediciones
inciertas (mediciones fuzzyficadas).
2.9 Control Difuso 25
El resultado de esta evaluación es un conjunto difuso (o varios conjuntos difusos) definido sobre el universo de posibles acciones.
4.- El conjunto o conjuntos difusos encontrados en el paso 3 son convertidos en un solo
valor crisp o en un vector de valores crisp. Esta conversión es llamada defuzzyfication.
Los valores defuzzyficados representan acciones de control tomadas por el controlador
difuso.
2.9.1.
Tipos de Controladores Difusos
Los controladores difusos se pueden clasificar en dos tipos:Controladores de tipo Mamdani
yControladores de tipo Takagi-Sugeno [49].
La principal diferencia entre estos controladores radica en la consecuencia de las reglas. Para el controlador tipo Mamdani, esta consecuencia es un conjunto difuso y para el tipo
Takagi-Sugeno es una función lineal de las entradas y no un conjunto difuso. En este trabajo se utilizará el controlador de tipo Takagi-Sugeno.
Controlador Dif uso del tipo T akagi−Sugeno
Siguiendo la estructura del controlador difuso que se muestra en la figura (2.5), se explica de manera breve el desarrollo del controlador del tipo Takagi-Sugeno.
1.- Fuzzyfication de los datos de entrada, es decir, éstos se convierten en conjuntos difusos.
2.- Obtención de una base reglas. El controlador de Takagi-Sugeno tiene la particularidad
R(1) :si (x 1 es L
(1)
x1) y. . . (xn es L (1)
xn)y. . .(xN es L
(1)
xN)entonces w1 =f1(x1, x2, . . ., xN)
.. .
R(m):si (x
1 es L(xmn)) y. . .(xnesL
(m)
xn )y. . .(xN es L
(m)
xN ) entonceswm =fm(x1, x2, . . ., xN)
.. .
R(M) :si(x1 es L (M)
xN ) y. . . (xnesL
(M)
xn )y. . .(xN es L (M)
xN ) entonces wM =fM(x1, x2, . . ., xN)
donde:
R(m) es lam-ésima regla.
M es el número de reglas, .
Xes el conjunto de las variables de entrada, el cual es descrito porX = (x1, x2, . . . , xn, . . . , xN)T.
N es el número de elementos del conjunto X.
LX es el valor lingüístico que toman la variables de entrada.
w son las consecuencias de las reglas.
f(x)es una función o algoritmo para obtener las consecuencias de las reglas [13].
3.- Obtención de la inferencia de la base de reglas, es decir, extracción de la conclusión de cada una de las reglas. Con estas reglas se calculan los grados de pertenencia para los valores de las variables del procesox1, . . . , xn, . . . , xN, se obtiene el mínimo (Implicación del minimo o la T-norma ver apéndiceA) de losN grados de pertenencia para la regla
my se denota comoμwm(antecedente). Posteriormente, los valoresμwm son computados
como wm =fm(x1, x2, . . . , xN) lo cual es una función o un algoritmo [13], para obtener
las consecuencias de cada una de las reglas. Para cada una de las reglasR(m) se obtiene
la dupla(μwm, wm) es decir el antecedente y consecuente de cada regla.
4.- Finalmente, la salida combinada de todas las reglas es la suma normalizada de todos
los pares (antecedente y consecuente). Es importante mencionar que al paso anterior
no es un proceso de def uzzyf ication ya que las consecuencias de las reglas no son
valores difusos sino valores crisp. Se utiliza la media aritmética ponderada definida por
2.10 Aproximación de una función utilizando LD 27
u=
M
P
m=1
μwm(xn)·wm M
P
m=1
μwm
(2.13)
En esta tesis se utilizarán el controlador difuso tipo Takagi-Sugeno como un sistema di-fuso para la aproximación de funciones. En la sección siguiente se introduce un ejemplo de
aproximación de funciones utilizando la LD.
2.10.
Aproximación de una función utilizando
LD
En esta sección se presentan un ejemplo con lafinalidad de ilustrar los conceptos descritos
anteriormente. Se trata de la aproximación de una función descrita por la ecuación (2.14)
realizada bajo el entorno MATLAB [27].
z = sin (2x)
exp (y/5) (2.14)
El sistema difuso toma las entradas (x, y), y como salida genera la aproximación de la
funciónz. Los datos de entradas identificados con las variablesx, y y toman valores de0hasta
10y −5hasta 5 respectivamente en intervalos de valor 0.1. Para realizar dicha aproximación
se utiliza una estructura del tipo Takagi-Sugeno descrita en la sección anterior.
1. F uzzyf ication
El tipo de función de pertenencia que se escogió es Gaussiana, (ver ecuación 2.3). El
centro y anchura de cada una de las funciones de pertenencia fueron definidos para el
rango especificado [0,10] para x,y[−5,5]para y de la siguiente forma.
La separación de los centros (SC) se calcula mediante la división del valor final del
rango(V F R)menos el valor inicial (V IR) entre el número de reglas(N R)más 1 como
se muestra en la ecuación (2.15)
SC= V F R−V IR
Después, los centros se distribuyen a lo largo del rango, es decir desde el inicio del rango con un intervalo dado por el valor de la separación de centros como se muestra en la
ecuación(2.16).
Centros=h V IR+SC V IR+ 2SC V IR+ 3SC i
(2.16)
La anchura de las funciones de pertenencia se obtienen dividiendo la distancia del punto
inicial al puntofinal de cada rango, entre el número de reglas. Esta anchura es la misma
para cada una de las funciones de pertenencia tal y como se muestra en la ecuación
(2.17).
Anchura= V F R−V IR
N R (2.17)
Por ejemplo, para la variable x
SC(x) = 10−0 3 + 1 = 2.5
Centros =
h
0 + 2.5 0 + (2∗2.5) 0 + (3∗2.5)
i
=
h
2.5 5 7.5
i
Anchura(x) = 10−0
3 = 3.33
En la tabla(2.2)se muestran los centros y las anchuras de las funciones de pertenencia
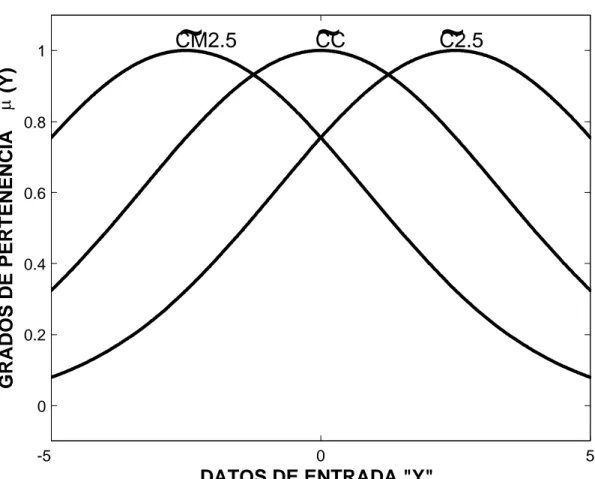
para cada variable de entrada. En lafigura(2.6)se presentan las funciones de pertenencia utilizadas parax y en lafigura(2.7) se presentan las funciones de pertenencia utilizadas para y.
Centros para x Centros para y Anchura para x Anchura para y
2.5 −2.5 3.3333 3.3333
5 0 3.3333 3.3333
7.5 2.5 3.3333 3.3333
2.10 Aproximación de una función utilizando LD 29
0 2 4 6 8 10
0 0.2 0.4 0.6 0.8 1
DATOS DE ENTRADA "X"
G
R
A
D
O
S
D
E
P
E
R
T
E
N
E
N
C
IA
μ (X
)
C2.5
C5
C7.5
~
~
~
-5 0 5 0
0.2 0.4 0.6 0.8 1
DATOS DE ENTRADA "Y"
G
R
A
D
O
S
D
E
P
E
R
T
E
N
E
N
C
IA
μ (Y
)
CM2.5
~
CC
~
C2.5
~
2.10 Aproximación de una función utilizando LD 31
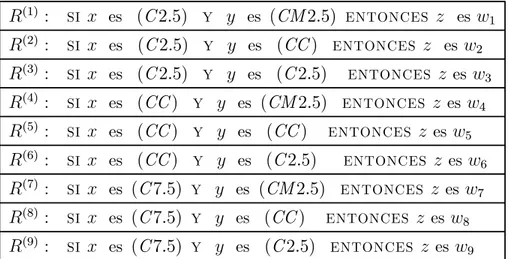
2. Base deReglas Dif usas
Teniéndose los valores de los centros se pueden definir los valores lingüísticos mostrados
en la tabla (2.3). Combinando las funciones de pertenencia de la variable x con las
correspondientes a las de la variable yda como resultado las nueve reglas mostradas en
la tabla(2.4).
CM2.5 : Cercano a Cero CC : Cercano a 2.5 C0.5 : Cercano a 0.5
C1 : Cercano a 1 C2 : Cercano a 2 C2.5 : Cercano a 2.5 C7.5 : Cercano a 7.5
Tabla 2.3: Valores Lingüísticos
R(1) : si x es (C2.5) y y es (CM2.5) entonces z es w 1
R(2) : si x es (C2.5) y y es (CC) entonces z es w2
R(3) : si x es (C2.5) y y es (C2.5) entonces z esw 3
R(4) : si x es (CC) y y es (CM2.5) entonces z es w 4
R(5) : si x es (CC) y y es (CC) entonces z es w 5
R(6) : si x es (CC) y y es (C2.5) entonces z es w6
R(7) : si x es (C7.5) y y es (CM2.5) entonces z es w 7
R(8) : si x es (C7.5) y y es (CC) entonces z esw 8
R(9) : si x es (C7.5) y y es (C2.5) entonces z es w 9
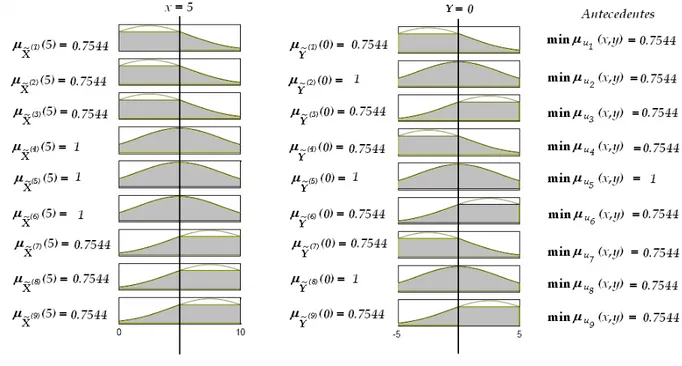
Figura 2.8: Antecedentes
Donde x, y son los valores de entrada, CC y CM2.5 son los valores lingüísticos L(1)X
y L(1)Y que toman las variables de entrada x, y respectivamente, w1 es el consecuente
también llamado peso para la regla 1 y z la salida (resultado de la aproximación).
3. Inf erencia.
Para llevar a cabo la inferencia, primero se calcula el antecedente y el consecuente de cada de una de las reglas para posteriormente relacionarlas con la implicación producto.
A continuación se ejemplifica el proceso de inferencia para la entradax= 5, y = 0.
Los antecedentes de cada una de las reglas se obtienen a partir del grado de pertenencia
que tienen los datos de entrada actuales (x= 5, y= 0) en cada una de las funciones de
pertenencia. Este proceso se ilustra en la figura (2.8) donde se observa la obtención de
2.10 Aproximación de una función utilizando LD 33
Número de regla Consecuente wm∗
1 −1
2 −1
3 —0.5
4 −1
5 —1
6 —0.5
7 —1
8 0
9 —1
Tabla 2.5: Consecuentes de las Reglas
Después de calcularse los antecedentes, se calculan los valores de w∗
m, mostrados en la
tabla (2.5), los cuales fueron obtenidos utilizando el algoritmo propuesto por Jang [13].
Este algoritmo utiliza el método de mínimos cuadrados para determinar los consecuentes de cada una de las reglas. Posteriormente se obtiene el resultado de la regla, es decir, la inferencia;(ver sección 2.6). La inferencia se realiza utilizando la relación de implicación producto (ver tabla 2.1),el resultado de cada regla se muestra en la Tabla ( 2.6). 4. Finalmente, se obtiene la salida mediante la media aritmética ponderada.
z =
4
P
i=1
μw
m ·w
∗
m
4
P
m=1
μwm
(2.18)
= −0.7544−0.7544−0.3772−0.7544−0.7544−0.3772 + 0.7544 + 0−0.7544 0.7544 + 0.7544 + 0.7544 + 0.7544 + 1 + 0.7544 + 0.7544 +0.7544 + 0.7544 = −0.5362
Por último, comparado el valor aproximado utilizando la estructura de Takagi−Sugeno
ver ecuación (2.18) y el valor obtenido utilizando la ecuación (2.14) el cual se muestra en la
Inferencia de cada una de las Reglas Resultado de la inferencia
prod(μw1, w∗
1) = prod(0.7544,−1) −0.7544 prod¡μw2, w∗
2
¢
=prod(0,7544,−1) −0.7544
prod¡μw3, w∗ 3
¢
=prod(0.7244,−0.5) −0.3772
prod¡μw4, w ∗ 4
¢
=prod(0,7544,−1) −0.7544
prod¡μw5, w ∗ 5
¢
=prod(1,−1) —1
prod¡μw6, w∗ 6
¢
=prod(0,7544,−0.5) −0.3772
prod¡μw7, w∗ 7
¢
=prod(0.7544,1) 0.7544
prod¡μw8, w ∗ 8
¢
=prod(0,7544,0) 0
prod¡μw9, w ∗ 9
¢
=prod(0.7544,−1) 0.7544
Tabla 2.6: Resultado de las Reglas
z = sin (2x)
exp (u/5) =−0.5440 (2.19)
El proceso descrito en el paso 3 y 4 se repite para cada uno de los datos de entradas en el
rango de[ 0 10 ] para la entrada x,y en el rango de[ −5 5 ] para la entraday. La función
(2.14)se compara con la aproximación(2.18)utilizando la estructura de Takagi-Sugeno. En la
figura(2.9)se observa, la aproximación obtenida de la función propuesta es bastante aceptable
ya que el error es 0.0078 por lo cual se puede concluir que la LD es una herramienta muy
2.11 Conclusiones 35
Figura 2.9: Comparación de la función ideal y su aproximación
2.11.
Conclusiones
En este capítulo se presentaron los conceptos básicos de la Lógica Difusa y esencialmente las herramientas utilizadas en la estructura Takagi-Sugeno, así como un ejemplo de aproxi-mación utilizado dicha estructura, del cual se concluye que la Lógica Difusa es una herramienta poderosa para la aproximación de funciones no lineales. La estructura de Takagi-Sugeno será
Capítulo 3
Control Difuso de Sistemas No
Lineales de 1er Orden
En este capítulo se presenta la estrategia utilizada para el control de un sistema no lineal de primer orden. Se mostrará un análisis en la teoría de Lyapunov para concluir estabilidad
uniforme finalmente acotada del sistema en lazo cerrado. Se estudiará el caso del control
de velocidad de un motor de corriente directa al cual se le aplicará la estrategia de control propuesta.
3.1.
Introducción
El control de velocidad es una tarea básica empleada en el ámbito de la robótica y en máquinas que utilizan control numérico por computadora (CNC), para realizar tareas como cortado, taladrado y desbastado. En aplicaciones de robótica, se emplea un control de velocidad para regular la velocidad angular de las ruedas de un robot móvil o la velocidad del eje del
como se muestra en [18] y motores usados en lectores de discos compactos [53].(CD-ROM)
Los controladores de tipo Proporcional Integral (PI) son utilizados regularmente para re-gular la velocidad en motores de CD siempre y cuando la referencia sea constante [2],[11]. Varias técnicas lineales han sido propuestas para mejorar el comportamiento de los contro-ladores básicos PI como por ejemplo, en [48] los autores emplean controcontro-ladores lineales con dos grados de libertad diseñados para seguimiento de respuestas escalón y para rechazo de
pares de carga. En [18] se propone un observador lineal de perturbaciones, utilizado sólo para referencias de tipo escalón, sin embargo en estos dos trabajos mencionados la estabilidad no es evaluada desde el punto de vista teórico, solo se estudia el comportamiento del sistema en lazo cerrado mediante experimentos
Aún cuando el comportamiento de los controladores lineales ante entradas del tipo escalón
son buenas, ante entradas variantes en el tiempo su comportamiento puede ser pobre y empeora por fenómenos no lineales tales como fricción y cargas no lineales tales como ventiladores. Con
la finalidad de tratar con los problemas mencionados anteriormente varios controladores no
lineales para la velocidad se han propuesto en la literatura.
En [4] se presenta una aproximación de alta ganancia heurística empleando controladores
de modos deslizantes (sliding modes). Una modificación similar a la técnica de de la última
capa acotada (boundary layer), la cual es usada para reducir el castañeo. Los resultados
ex-perimentales son presentados empleando referencias variantes en el tiempo y cargas lineales y no lineales. Debido al hecho de que en muchas aplicaciones la medición de la velocidad se obtiene por medio de un tacogenerador, el cual es un captor generalmente ruidoso, ésto puede
limitar la máxima ganancia disponible del controlador.
Las técnicas inteligentes, tales como redes neuronales, lógica difusa y combinaciones de ambas, han sido propuestas como alternativas a los diseños basados en técnicas lineales y no lineales. Varios trabajos emplean redes neuronales para controlar la velocidad de un motor de
CD [19], [26], [34],[46]. En [19] se emplea una red boundary layer en tiempo discreto combina-da con un observador de par de carga. La red neuronal se entrena empleando un algoritmo de
retropropagación (backpropagation). Los experimentos son realizados mediante entradas del
3.2 Planteamiento del Problema 39
en lazo cerrado. En las referencias [26], [34] y [46] también se propone un controlador basado en una red neuronal, la cual es entrenada mediante un algoritmo de retropropagación. Su
comportamiento es evaluado por medio de simulaciones numéricas y experimentos sobre pro-totipos de laboratorio. Para el diseño de los controladores se emplearon argumentos heurísticos de estabilidad.
Las técnicas difusas han sido empleadas para control de velocidad en [36], [53] o combinadas con controladores lineales tipo PI [37], [44], o con controles de modos deslizantes [23]. En la mayoría de los casos la estabilidad sólo es evaluada mediante resultados experimentales. Sin
embargo, es interesante observar que en [53], la sintonización de las reglas fue hecha mediante un algoritmo genético. Las técnicas difusas y redes neuronales se han combinado para controlar la velocidad en los servomecanismos [35], [47]. En [35], el entrenamiento fue hecho usando un método del gradiente descendente y el controlador difuso se asemeja a una red neuronal multicapa. En [47] se emplea un algoritmo de retropropagación y un controlador difuso se
usa para supervisar el comportamiento de la red neuronal. En ambas referencias se emplean
argumentos heurísticos para diseñar los controladores y la estabilidad sólo es verificada por
medio de simulaciones y experimentos.
De la revisión bibliográfica anterior se puede observar que en el diseño de controladores de
velocidad para servomecanismos mediante redes neuronales y lógica difusa, no se realizan estu-dios teóricos sobre la estabilidad del sistema en lazo cerrado. El entrenamiento es comúnmente
realizado mediante algoritmos de retropropagación o con el método del gradiente descendente. Uno de los hechos que se mencionan en la literatura [25] es que estas técnicas no pueden garan-tizar que los estimados permanezcan acotados, y por consiguiente, tampoco se puede concluir estabilidad del sistema en lazo cerrado.
3.2.
Planteamiento del Problema
adaptable, donde las consecuencias de las reglas difusas son actualizadas en línea. Debido a que el controlador no contiene términos de conmutación se evita el castañeo. Del modelo
no lineal del motor sólo se necesita conocer el valor nominal de la ganancia de voltaje de entrada. La estabilidad del sistema en lazo cerrado se estudia mediante el método de Lyapunov. Se presentan resultados experimentales para estudiar la ley de control propuesta la cual es comparada con un controlador PI más prealimentación. El objetivo de control es hacer que la salida x y una referenciar variante en el tiempo cumplan que|r−x|≤∈ ∀t > t0 ≥0.
Sea el modelo dinámico de un servomecanismo no lineal de primer orden en lazo cerrado dado por la siguiente ecuación diferencial:
Jx˙ +h(x) =τ (3.1)
Donde:
x : Velocidad
h(x) : Término no lineal dependiente dex
J : Inercia
τ : Par aplicado
Se supone que la medición de la velocidad está disponible y que existe una relación lineal
entre el par aplicado τ y el voltaje de control u, esto es, τ = ku donde k es la constante de
proporcionalidad. La ecuación (3.1) puede escribirse como
˙
x= k
Ju− h(x)
J (3.2)
Definiéndose
k J =b;
h(x)
J =f(x)
y usando la ecuación(3.2), se obtiene
˙
3.3 Ley de Control Difusa Adaptable. 41
El error de seguimiento está definido como
e=r−x. (3.4)
donde r es una referencia variante en el tiempo. La derivada del error con respecto al tiempo
está dada por
˙
e= ˙r−x˙ (3.5)
Sustituyendose (3.3) en(3.5)se obtiene
˙
e = r˙−[bu−f(x)]
= r˙−bu+f(x)±bnomu
= r˙−bu+f(x)−bnomu+bnomu
donde bnom es un estimado deb. Reordenando términos da como resultado
˙
e= ˙r−bnomu+f(x)−bu+bnomu (3.6)
Definiéndose
g(x, u) =f(x)−bu+bnomu (3.7)
y sustituyéndose (3.7) en (3.6) se obtiene finalmente el siguiente sistema no lineal de primer
orden
˙
e= ˙r−bnomu+g(x, u) (3.8)
3.3.
Ley de Control Difusa Adaptable.
La solución del problema de control se lleva a cabo con la compensación del término no lineal utilizando LD en donde se emplea un controlador de tipo Takagi -Sugeno como un
sistema difuso para la aproximación de las incertidumbres g(x, u).
En esta sección se emplea una ley de control con una estimacióngˆ(r, uf)deg(x, u)usando un esquema de tipo Takagi-Sugeno [42]. Esto es:
u= 1
bnom
uf es una versiónfiltrada de u y está definida como
˙
uf =−k1uf +k2sat(u) (3.10)
donde k1 y k2 son constantes positivas. Nótese que si u se empleara para estimar g(x, u) en
lugar de uf entonces aparecería un lazo algebraico cuando se implementa la ley de control
(3.9). La función sat(u)está definida por la ecuación(3.11)
sat(u)
⎧ ⎪ ⎪ ⎨ ⎪ ⎪ ⎩ 1 u −1
u > umax −umax ≤u≤umax
u <−umax
(3.11)
La inclusión de la saturación ayuda a simplificar el análisis de estabilidad.
La estimación de g(x, u) está dada por
ˆ
g(r, uf) = M
P
m=1
μm(r, uf) ˆwm m
P
i=1
μm(r, uf)
=wbTσ(r, uf)
donde M es el número de reglas difusas, μm(r, uf)son las funciones de pertenencia las cuales
se asumen Gaussianas ywˆson lo sestimado dewque son las consecuencias de las reglas. Estos
términos están definidos como
3.3 Ley de Control Difusa Adaptable. 43
σ(x, uf) =
μ(r, uf) M
P
m=1
μm(r, uf)
; μ(r, uf) = ⎡ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎢ ⎣
μ1(r, uf)
μ2(r, uf) .. .
μm(r, uf) .. .
μM(r, uf) ⎤ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎥ ⎦ ˆ
g(r, u) = ˆwTσ(r, uf) (3.12)
Es importante enfatizar que las consecuencias de las reglas wˆ son actualizadas en línea e
inicializadas en cero. Además, obsérvese que para la estimación de g(x, u) se utiliza la señal
de referenciar en lugar de la velocidadx,lo cual da la ventaja de tener una mejor estimación
ya que se utiliza la señal deseada y como estas señales son libres de ruido esto trae como resultado un mejor desempeño.
Por otro lado, se asume que el término no lineal g(x, u) es aproximado mediante un
aproximado difuso dado por
g(x, u) = wTσ(x, u) +ζ; (3.13)
|ζ| ≤ kζ; kwk2 ≤η; σ(·,·)≤kσ. (3.14)
dondeζes el error de aproximación,kς, ηson las cotas superiores para el error de aproximación
y para la consecuencias respectivamente. El error en las consecuencias y su derivada con
respecto al tiempo están dados por
˜
w = w−wˆ (3.15)
·
˜
w = −wˆ·
Por otro lado, sustituyendo (3.12)en (3.9) se obtiene
u= 1
bnom
£
kpe+ ˙r+ ˆwTσ(r, uf)
¤
(3.16)
Sustituyendo (3.16) en(3.8) se obtiene
˙
e= ˙r− Ã
bnom
£
kpe+ ˙r+ ˆwTσ(r, uf)
¤
bnom
!
Reordenando términos y utilizando la aproximación de g(x, u)descrita en (3.13), se obtiene
˙
e = −kpe−wˆTσ(r, uf) +wTσ(x, u) +ζ
= −kpe−wˆTσ(r, uf) +wTσ(x, u) +ζ±wTσ(r, uf)
= −kpe+
¡
wT −wˆT¢σ(r, uf) +wT [σ(x, u)−σ(r, uf)] +ζ
Usando (3.15) finalmente se obtiene
˙
e=−kpe+ ˜wTσ(r, uf) +wT [σ(x, u)−σ(r, uf)] +ζ (3.17)
3.3.1.
Análisis de Estabilidad
Para el análisis de estabilidad se utiliza la siguiente función candidata de Lyapunov, donde
kw >0.
V = 1 2kw
e2+ 1 2k2
w
˜
wTw˜+ 1 2u
2
f (3.18)
La derivada respecto al tiempo de (3.18) es
˙
V = 1
kw
ee˙+ 1
k2 w
˜
wTw˜· +ufu˙f (3.19)
Sustituyéndose e˙ y u˙f dados por(3.17) y(3.10) respectivamente en(3.19)se obtiene
˙
V =−kp
kw
e2+ 1
kw
ew˜Tσ(r, uf)+
1
kw
ewT [σ(x, u)−σ(r, uf)]+
1
kw
eζ+ 1
k2 w
˜
wTw˜·−k1uf2+k2ufsat(u)
Parametrizando la ganancia proporcional kp como kp = kp1kw y reordenando términos se
obtiene
˙
V = −kp1e2−k1u2f −k2ufsat(u) +
1
kw
ζe+ 1
kw
ewT[σ(x, u)−σ(r, uf)]
+ 1
kw
˜
wT µ
eσ(r, uf) +
1 kw · ˜ w ¶ (3.20)
Considérese ahora el último término de la ecuación anterior.
eσ(r, uf) +
1
kw
·
˜
3.3 Ley de Control Difusa Adaptable. 45
en donde w˜· está dado por
−w˜· =wˆ· =kw[eσ(r, uf)−β|e|wˆ] (3.22)
que corresponde a la ley de actualización de las consecuencias. Sustituyendo (3.21) en(3.20) se obtiene
˙
V = −kp1e2−k1u2f −k2ufsat(u) +
ζe kw
+ 1
kw
ewT [σ(x, u)−σ(r, uf)]
+ β
kw |
e|w˜Twˆ (3.23)
Considérense las siguientes cotas superiores
|r˙| ≤ kr (3.24)
kσ(∗)k ≤ kσ; (3.25)
kwk ≤ η (3.26)
˜
wTwˆ = w˜T(w−w˜)≤ −kw˜k(kw˜k−η) (3.27)
sat(u) ≤ umax (3.28)
se tiene
−k2ufsat(u)≤k2umax|uf| (3.29)
de desigualdad definida en (3.14) se tiene
ζe kw ≤
kζ
kw |
e| (3.30)
Usando la desigualdad del triángulo es posible obtener
kσ(x, u)−σ(r, uf)k≤kσ(x, u)k+kσ(r, uf)k≤2kσ Entonces
1
kw
ewT [σ(x, u)−σ(x, uf)]≤
2ηkσ
kw |