Instituto Tecnológico v de Estudios Superiores de Monterrey Campus Monterrey
Monterrey, Nuevo León a 06 Septiembre del 2004.
Lic. Arturo Azuara Flores:
Director de Asesoría Legal del Sistema
Por medio de la presente hago constar que soy autor y titular de la obra titulada "Estimación de la Dirección de Arribo y de los Coeficientes Óptimos en un Sistema de Antenas Inteligentes Usando Redes Neuronales", en los sucesivo LA OBRA, en virtud de lo cual autorizo a el Instituto Tecnológico y de Estudios Superiores de Monterrey (EL INSTITUTO) para que efectúe la divulgación, publicación, comunicación pública, distribución y reproducción, así como la digitalización de la misma, con fines académicos o propios al objeto de EL INSTITUTO.
El Instituto se compromete a respetar en todo momento mi autoría y a otorgarme el crédito correspondiente en todas las actividades mencionadas anteriormente de la obra.
De la misma manera, desligo de toda responsabilidad a EL INSTITUTO por cualquier violación a los derechos de autor y propiedad intelectual que cometa el suscrito frente a terceros.
Vladimir Zahuindanda Rivera Arzola Nombre y Firma
Estimación de la Dirección de Arribo y de los Coeficientes
óptimos en un Sistema de Antenas Inteligentes Usando Redes
Neuronales
Title Estimación de la Dirección de Arribo y de los Coeficientes óptimos en un Sistema de Antenas Inteligentes Usando Redes Neuronales
Authors Rivera Arzola, Vladimir Z. Affiliation ITESM
Issue Date 01/05/2000
Abstract El desarrollo de este trabajo se basa en el diseño de un sistema de antenas inteligentes usando redes neuronales. El primer problema tratado es la estimación de la Dirección de Arribo (DDA) de los usuarios móviles que están enviando sus mensajes a un arreglo lineal de antenas en fase. Una red neuronal fue diseñada para estimar la dirección de las fuentes que tiene acceso al arreglo de antenas. En el segundo problema, otra red neuronal fue utilizada para encontrar los coeficientes óptimos del arreglo de antenas para emitir el patrón de radiación hacia el usuario de interés. Las soluciones de estos dos problemas usando redes neuronales mostraron un mejor desempeño que los algoritmos ya existentes como el de Clasificación MÚltiple de Señales (MUSIC) para la estimación de la DDA y de la ecuación de Wiener-Hopf para la obtención de los
coeficientes óptimos.
Discipline Ingeniería y Ciencias Aplicadas / Engineering & Applied Sciences
???pdf.cover.sheet .dc.contributor.adv isor???
Dr. Manuel Valenzuela Rendón
???pdf.cover.sheet .thesis.degree.disci pline???
Graduados en Computación, Información y Comunicaciones
???pdf.cover.sheet .thesis.degree.prog ram???
Campus Monterrey
Rights Open Access
Downloaded 18-Jan-2017 09:00:36
INSTITUTO TECNOLOGICO Y DE ESTUDIOS
SUPERIORES DE MONTERREY
Campus
Monterrey-División de Computación, Información y Comunicaciones
Programa de Graduados en
Computación, Información y Comunicaciones
Estimación de la Dirección de Arribo y de los Coeficientes
Óptimos en un Sistema de Antenas Inteligentes Usando Redes
Neuronales
Tesis
Presentada como requisito parcial para obtener el grado académico de
Maestro en Ciencias en Ingeniera Electrónica con
Especialidad en Telecomunicaciones
Vladimir Zahuindanda Rivera Arzola
Instituto Tecnológico y de Estudios Superiores de
Monterrey
Campus Monterrey
División de Computación, Información y Comunicaciones Programa de Graduados en Computación, Información y Comunicaciones
Los miembros del comité de tesis recomendamos que la presente tesis de Vladimir Zahuindanda Rivera Arzola sea aceptada como requisito parcial para obtener el grado
académico de Maestro en Ciencias en Ingeniería Electrónica, especialidad en: Telecomunicaciones
Comité de tesis:
Asesor de la tesis
Dr. David Muñoz Rodríguez Sinodal
Dr."Carlos Scheel Mayenberger Director del Programa de Graduados
en Computación, Información y Comunicaciones
Estimación de la Dirección de Arribo y de los
Coeficientes Óptimos en un Sistema de Antenas
Inteligentes Usando Redes Neuronales
por
Ing. Vladimir Zahuindanda Rivera Arzola
Tesis
Presentada al Programa de Graduados en Computación, Información y Comunicaciones del
Instituto Tecnológico y de Estudios Superiores de Monterrey, Campus Monterrey como requisito parcial para obtener el grado académico de
Maestro en Ciencias en Ingeniería Electrónica
Telecomunicaciones
Instituto Tecnológico y de Estudios Superiores de Monterrey
Campus Monterrey
A Dios, mi señor
Reconocimientos
Al Instituto Tecnológico y de Estudios Superiores de Monterrey por darme la oportuni-dad de seguir mejorando mis habilioportuni-dades.
Al Instituto Politécnico Nacional, por las bases que me dió para desarrollarme profe-sionalmente.
En especial al Dr. Manuel Valenzuela Rendón por su gran paciencia, enseñanza, con-fianza y consejos en el desarrollo de este trabajo.
Al Dr. David Muñoz Rodríguez por su apoyo incondicional, interés y colaboración durante el desarrollo de este trabajo y durante mis estudios de maestría.
Al M. en C. Artemio Aguilar Coutiño por sus comentarios para mejorar este trabajo. A mi papi y a mi mami, porque todas las cosas buenas que he hecho, han sido gracias a su amor, confianza y enseñanza.
A mis hermanas May, Palmira, Zulma, Yanin y Xiu, porque en momentos a punto de claudicar, su amor, su apoyo y su confianza me impulsaban a seguir día con día. En especial a Paty, Cuauhtémoc y Juan Fidel, gracias por su apoyo y amistad incon-dicional.
A todos amigos del ITESM Bernardo, Marcos, Mauricio, Ernesto, Antonio, Eduardo, Félix, Oscar, Fernando, Jorge, Ricardo, Alejandro, Liliana, Heidi, Miriam, Juan José, Galdino, Edgar y a todos los de las nuevas generaciones.
A mis amigos de México, Ivan, Juan José, Ana, Aldo, Verónica, Luis y Federico por su afecto y amistad.
A ti, Lillian por tu amor y apoyo que me has dado.
VLADIMIR ZAHUINDANDA RIVERA ARZOLA
Instituto Tecnológico y de Estudios Superiores de Monterrey Mayo 2000
Estimación de la Dirección de Arribo y de los
Coeficientes Óptimos en un Sistema de Antenas
Inteligentes Usando Redes Neuronales
Vladimir Zahuindanda Rivera Arzola, M.C.
Instituto Tecnológico y de Estudios Superiores de Monterrey, 2000
Asesor de la tesis: Dr. Manuel Valenzuela Rendón
Índice General
Reconocimientos iv Resumen v índice de Tablas viii índice de Figuras x
Capítulo 1 Panorama General y Contribuciones 1 1.1 Introducción 1 1.2 Situación Problemática 1 1.3 Objetivo 3 1.4 Organización de la Tesis 3 1.5 Contribuciones 3 Capítulo 2 Fundamentos del Sistema de Antenas Inteligentes 5 2.1 Definición 5 2.2 Principios Básicos 6 2.3 Modelo del Arreglo de Sensores 7 2.4 Formador de Haces Adaptable 8 2.5 Enfoque de las Antenas Inteligentes 11 2.5.1 Acceso Múltiple de División de Espacio 11 2.5.2 Antenas como Filtros Espaciales 11 2.6 Sistemas Analógico y Digitales 12 2.7 Arquitectura de las Antenas Inteligentes 12 2.8 Beneficios a Redes Inalámbricas 13 2.8.1 Antenas Inteligentes en Sistemas de Radio Celular 14 2.9 Resumen 15 Capítulo 3 Algoritmos de Alta Resolución 17 3.1 Modelo Base de la Señal 17 3.2 Algoritmo MUSIC 20
3.2.1 Consideraciones Prácticas 23 3.3 Criterio del Error Cuadrático Medio 24 3.4 Resumen 26 Capítulo 4 Red Neuronal 27 4.1 Modelo de la Neurona 27 4.2 Red de Retropropagacion 28 4.2.1 Funcionamiento de una Red de Retropropagación 28 4.2.2 Regla Delta 29 4.2.3 Error 31 4.2.4 Constante de Aprendizaje 31 4.2.5 Momento 31 4.3 Importancia de la Red de Retropropagación 32 4.4 Resumen 32 Capítulo 5 Resultados 33 5.1 Modelo de la Señal Analítica 33 5.2 Algoritmo MUSIC 36 5.3 Patrón de Radiación 43 5.4 Condiciones de Propagación 48 5.5 Redes Neuronales 54 5.5.1 Construcción de la Red de Retropropagación 55 5.5.2 Funcionamiento de las Red Implementada 57 5.5.3 Error Total 58 5.5.4 Red Para el Cálculo del Vector de Coeficientes 62 5.5.5 Sobreajuste y Subajuste a Redes 66 5.5.6 Tiempos de ejecución 68 5.5.7 Evaluación en la Región del Campo Cercano 70 5.5.8 Ventajas de las Redes Neuronales 70 Capítulo 6 Conclusiones 73
6.1 Aportaciones Futuras 74 Bibliografía 77
Vita 79
Índice de Tablas
5.1 Patrones de prueba 61 5.2 Salida deseada, salida real y error absoluto de cada patrón 62 5.3 Resultados de la red neuronal con datos reales 66
índice de Figuras
2.1 Patrón de radiación del sistema de antenas inteligentes 6 2.2 Elementos principales del sistema de antenas inteligentes 7 2.3 Supresión del interferente para un arreglo de dos elementos 9 2.4 Patrón de radiación de un sistema de antenas inteligentes 10 2.5 Antenas inteligentes como filtros espaciales 11 2.6 Reuso del canal por separación angular 14 2.7 Sistema celular con un cluster de tamaño cuatro 15 3.1 Estimación de la dirección de arribo 18 3.2 Arreglo lineal de sensores uniformemente espaciados 19 3.3 Espectro de los valores propios 22 3.4 Diagrama a bloques del algoritmo MUSIC 24 4.1 Modelo simplificado de una neurona 28 4.2 Arquitectura de una red de retropropagación 29 5.1 Estimación de la DDA empleando el algoritmo MUSIC 39 5.2 Estimación de la DDA empleando el algoritmo MUSIC en condiciones
ideales 40 5.3 Estimación de la DDA empleando el algoritmo MUSIC en condiciones
ideales 41 5.4 Estimación de la DDA empleando el algoritmo MUSIC en condiciones
ideales 42 5.5 Patrón de radiación del sistema de antenas inteligentes para una señal
con una DDA de —30 grados 45 5.6 Patrones de radiación para señales con DDA de —90, —60, —20 y —10
grados 46 5.7 Patrones de radiación para señales con DDA de 0, 10, 20 y 30 47 5.8 Patrones de radiación para señales con DDA de 60 y 90 grados 48 5.9 (a) DDA y (b) Patrón de radiación para señales con ángulo de 0 grados. 49 5.10 (a) DDA y (b) Patrón de radiación para señales con ángulo de 20 grados. 50 5.11 (a) DDA y (b) Patrón de radiación para señales con ángulo de 45 grados. 51
5.12 (a) DDA y (b) Patrón de radiación para señales con ángulo de —10 grados. 52 5.13 (a) DDA y (b) Patrón de radiación para señales con ángulo de —30 grados. 52 5.14 (a) DDA y (b) Patrón de radiación para señales con ángulo de —60 grados. 53 5.15 Enfriamiento de constantes 56 5.16 Diagrama a bloques de la red de retropropagación 59 5.17 Error absoluto entre las DDA deseadas y reales 60 5.18 Diagrama a bloques de la red de retropropagación 63 5.19 Error absoluto del vector de coeficientes deseado y del estimado . . . . 64 5.20 Error entre el ángulo deseado y el ángulo producido por los coeficientes
de la red neuronal 65 5.21 Error entre el ángulo deseado y ángulo real 67 5.22 Error entre los coeficientes deseados y los coeficientes actuales . . . 67
Capítulo 1
Panorama General y Contribuciones
1.1 Introducción
Los años noventa han sido descritos como la década de las comunicaciones inalámbricas. La evolución de las telecomunicaciones, desde el teléfono alámbrico hasta los servicios de comunicación personal, es resultado del avance y de la disponibilidad de los servicios inalámbricos. La industria de las comunicaciones inalámbricas ha experimentado un explosivo crecimiento, en los diferentes servicios de telecomunicaciones, que a su vez son proporcionados en diferentes formas. Por ejemplo, las comunicaciones móviles satelita-les, en las cuales las comunicaciones son enlazadas por medio de los satélites hacia los usuarios móviles y las comunicaciones terrestres, en donde los canales de comunicación son proporcionados por las estaciones bases hacia los usuarios móviles. Los servicios de comunicación inalámbrica son proporcionados por radio enlaces, donde la información tal como voz y datos son trasmitidos por ondas electromagnéticas moduladas. Por lo tanto, todos los servicios de telecomunicaciones están sujetos a la interferencia de pro-pagación del medio ambiente y del efecto de interferencia de las señales de los cocanales en un sistema de reuso de frecuencia [1].
1.2 Situación Problemática
La capacidad del sistema de comunicaciones puede ser incrementada directamente aumentando el ancho de banda existente de los canales de comunicación o permitiendo el uso de nuevas frecuencias para el servicio en cuestión. Sin embargo, el problema es que el espectro de frecuencias es finito y gran parte ya está utilizado por estaciones de radio y televisión, los militares, servicios de emergencia y transmisores de microon-das; además, el medio electromagnético está congestionándose con la proliferación de fuentes de interferencia intencionales y no intencionales [2].
efec-to más adverso de la propagación al cual se enfrentan los sistemas de comunicaciones inalámbricas es el de desvanecimiento por multipropagación. El efecto de desvane-cimiento por multipropagación, es causado por la superposición de señales reflejadas provenientes de varias señales del medio ambiente de propagación, creando errores en la transmisión digital.
El uso del sistema de antenas inteligentes es con la finalidad de utilizar una de las últimas fronteras tecnológicas que promete mejorar sustancialmente la capacidad de los sistemas inalámbricos. El sistema de antenas inteligentes ofrece la habilidad de mejorar la recepción, detección y parámetros de estimación de la señal. De estos quizá el más importante para la industria de las telecomunicaciones es el mejoramiento de la recepción de la señal, el cual está implícitamente relacionado con la dirección de arribo de la señal. La mejora en la capacidad se debe al incremento enorme de la ganancia de la antena hacia las señales deseadas y simultáneamente la reducción de la ganancia de la antena hacia los interferentes [3].
La estimación de la dirección de arribo (DDA) de las señales incidentes en un sistema de antenas inteligentes es crítica, porque es uno de los problemas principales en sistemas inalámbricos. Para estimar la DDA típicamente se realiza por medio de algoritmos de alta resolución (clasificación múltiple de señales, máxima verosimilitud, etc.) los cuales, en términos estadísticos, hacen uso únicamente de la información del primer y segundo momento (media y varianza) de los datos.
Otro problema es la estimación del vector de coeficientes óptimos, el cual se emplea para radiar y ajustar el patrón de radiación hacia la dirección deseada, la eficiencia del algoritmo empleado para estimar el vector de coeficientes depende del procedimento de su evaluación. La mayoría de estos algoritmos se basan en criterios como la máxima relación portadora interferente, mínimo error cuadrático, mínima varianza, etc. Por lo general estos algoritmos requieren de un conocimiento apriori de las características del interferente para que tengan un desempeño óptimo.
Los algoritmos mencionados anteriormente son empleados por el sistema de an-tenas inteligentes para estimar la DDA y el vector de coeficientes óptimos. En este sistema se debe asumir que los elementos del arreglo sean idénticos y tengan un com-portamiento lineal para que el desempeño de los algoritmos sea eficiente. En la mayoría de los casos, el comportamiento de este arreglo de sensores no es lineal o es desconoci-do, lo que implica que el comportamiento de los algoritmos empleados en el sistema de antenas se vuelvan complejos y que su desempeño sea deficiente.
1.3 Objetivo
El objetivo de esta tesis es proponer un modelo que estime la dirección de arribo de las señales incidentes y calcule el vector de coeficientes óptimos en un sistema de antenas inteligentes empleando la red neuronal de retropropagación con el fin de proporcionar un mejor desempeño del sistema de antenas inteligentes.
1.4 Organización de la Tesis
El trabajo está organizado de la siguiente manera:
En el capítulo 2 se describen los fundamentos del sistema de antenas inteligentes, los conceptos del formador de haces adaptables, la arquitectura y el enfoque del sistema. El capítulo concluye con una descripción de los beneficios de utilizar el sistema de antenas inteligentes en redes inalámbricas.
En el capítulo 3 se describe el modelo base de la señal recibida en el arreglo de sensores, el cual es la base para el análisis del algoritmo de alta resolución MUSIC y del algoritmo de la ecuación de Wiener-Hopf. También en este capítulo se describe el funcionamiento de estos algoritmos.
En el capítulo 4 se describen los conceptos básicos de la red neuronal de retro-propagación, su arquitectura, su funcionamiento, su regla general de aprendizaje y sus principales parámetros de operación.
En el capítulo 5 se incluyen los resultados de las simulaciones de los algoritmos tradicionales para estimar la DDA y para estimar el vector de coeficientes óptimos, además de los resultados de las simulaciones de las redes neuronales implementadas para estimar dichos parámetros.
Por último en el capítulo 6 se presentan las conclusiones del trabajo y las aporta-ciones futuras.
1.5 Contribuciones
Las contribuciones de este tesis están relacionadas con el desempeño del sistema de antenas inteligentes.
Las simulaciones de la red neuronal de retropropagación desarrolladas durante esta tesis, muestran la habilidad de mejorar la estimación de la DDA de la señal, aún si las fuentes sufren algún cambio de fase.
Capítulo 2
Fundamentos del Sistema de Antenas Inteligentes
El propósito de este capítulo es presentar los conceptos fundamentales del sistema de antenas inteligentes. En particular se define el sistema de antenas inteligentes, se describen sus principios básicos de operación, se deduce el modelo de la señal a la salida del arreglo de antenas que es el vector de entrada al sistema de antenas inteligentes, además se describe el funcionamiento del formador de haces adaptables que es donde se estima la DDA y se modifica el patrón de radiación, también se describe el sistema de antenas inteligentes analógico y digital, y al final del capítulo se mencionan algunos de los beneficios que ofrece el sistema de antenas inteligentes al momento de implementarse en las redes inalámbricas.
2.1 Definición
Un sistema de antenas inteligentes está formado por un número de elementos de antenas espacialmente separados cuyas salidas son combinadas a la entrada de un transceptor múltiple como se muestra en la figura 2.2. La función de estos elementos múltiples de antenas es como la de una apertura espacial, en la cual las señales espacio temporal son observadas. En contraste con un receptor sencillo, el cual combina las señales presentes en la apertura fija de la antena, el arreglo de antenas tiene la habilidad de ajustar dinámicamente estas propiedades para mejorar el desempeño del sistema. Por esta razón el arreglo de antenas es denominado como antenas inteligentes, el cual puede ser un elemento sencillo de antena cuyas características pueden ser ajustadas automáticamente como sean necesarias. También el sistema de antenas inteligentes es aquel que cambia automáticamente su patrón de radiación en respuesta hacia una señal del medio ambiente.
El término de antena inteligente representa a los dispositivos que tratan de elevar el desempeño de un sistema de transmisión/recepción de radiofrecuencia por medio de arreglos de antenas, compuestos por varios elementos y sofisticados sistemas de proce-samiento de señales. Además tienen la habilidad de poder adaptarse continuamente en respuesta a las necesidades del canal y de la señal.
El sistema de antenas inteligentes está basado en arreglos de fases o formadores de haces, los cuales combinan las señales provenientes de varios elementos de antenas. El patrón de radiación de una antena puede ser controlado ajustando la amplitud y la fase de las señales de las antenas individuales. Esto permite que el arreglo de hecho, sea un filtro espacial el cual aumenta o rechaza señales hacia su dirección de arribo [1]. El sistema de antenas inteligentes se adapta a las necesidades de comunicación dirigiendo el haz principal al usuario deseado y dirigiendo nulos a los interferentes como se ve en la figura 2.1.
Y Y - Y
[image:22.626.261.432.294.427.2]I Beamformer |
Figura 2.1: Patrón de radiación del sistema de antenas inteligentes
2.2 Principios Básicos
La figura 2.2 muestra los elementos principales del sistema de antenas inteligentes, uno de los cuales es el arreglo de sensores que consiste de M sensores designados para recibir o transmitir señales. El arreglo físico es arbitrario y puede ser circular, planar, etc., por lo general se supone que el arreglo es linealmente uniforme.
La salida de cada uno de los M sensores es introducido a la red formadora de haces, donde las salidas son procesadas por un filtro variante en el tiempo, por su término en inglés Linear Time Variant (LTV). Estos filtros determinan la dirección del patrón de radiación del sistema de antenas inteligentes. La salida de cada filtro LTV es sumada para obtener la salida general y(t). Los coeficientes complejos de los filtros LTV son determinados por el procesador adaptable.
recibidas por el arreglo de sensores, x(t) para k = 1, 2,..., M, la salida del sistema de antenas inteligentes, y(t), la estructura espacial del arreglo de sensores, la estructura temporal de la señal recibida, la retroalimentación de las señales desde los móviles y la topología de la red.
x,(t)
y(t)
Salida del Arreglo
x k(t) para k= 1, ...,N
[image:23.618.177.483.133.359.2]Retroalimentación de Señales
Figura 2.2: Elementos principales del sistema de antenas inteligentes
2.3 Modelo del Arreglo de Sensores
El modelo de salida de los M elementos de antenas es descrito por el vector de la señal recibida en el sistema de acuerdo a la siguiente ecuación
x(t) = Xi(t) (2.1)
donde x¿(í) denota la señal observada en el zésimo sensor. Suponiendo una linealidad en los sensores del arreglo, el vector de la señal recibida puede ser descompuesto en un vector de la señal s(t) y en un vector de ruido n(í) de la siguiente manera:
x(í) = s(í) + n(í). (2.2) En general, el vector de la señal s(t) puede ser la superposición de varias señales las cuales corresponden a varios frentes de ondas planas incidentes del medio ambiente,
por otra parte el vector del ruido aditivo n(í) incluye tanto a los interferentes como al ruido inherente a los sensores [3].
En este trabajo se hacen las siguientes suposiciones, de acuerdo a las señales que arriban en el arreglo: las señales son formadas por un número finito de ondas planas, el medio alrededor del arreglo de antenas es homogéneo, la atenuación de la señal al cruzar el arreglo es transparente y las señales que arriban en el arreglo son originadas en el campo lejano del arreglo.
2.4 Formador de Haces Adaptable
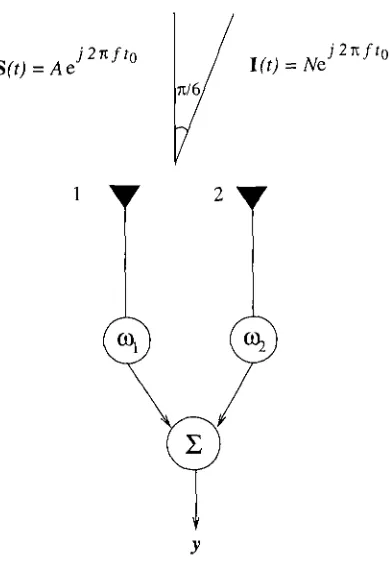
Uno de los principales elementos del sistema de antenas inteligentes es el formador de haces adaptables, este es el dispositivo que permite separar señales en la misma banda de frecuencia pero separadas en el dominio del espacio. Esto es lo que permite separar el interferente de la señal deseada. El proceso que sigue es sumar las señales provenientes de varios elementos de antenas para maximizar la relación señal a ruido a la salida del sumador [1].
El procedimiento del formador de haces es usado para radiar y modificar en un arreglo el patrón del haz, y para intensificar la recepción de la señal deseada, mientras se suprime la interferencia de otras señales, esto se hace a través de la selección de un coeficiente complejo, el cual se ilustra en el siguiente ejemplo.
Asuma que una señal s(t) es generada por un radio móvil localizado en el campo lejano del sistema de antenas inteligentes, la onda electromagnética que arriba en el arreglo del sensor es plana (figura 2.3). Si la dirección 9 es diferente de cero, el sensor 2 experimenta un retraso con respecto al elemento 1 de
, (2.3)
c
donde d es la separación entre sensores y c es la velocidad de la onda electromagnética [4]. Si s(t) es una señal de banda angosta con frecuencia portadora /o, entonces el retardo corresponde al cambio de fase y es
6, (2.4)
donde Ao es la longitud de onda correspondiente a la frecuencia portadora. Además se
antenas inteligentes debido a s(t) es:
s(t) [(whi + (2.5)
[image:25.622.235.431.112.396.2]I(íj = AfeJ2nft0
Figura 2.3: Supresión del interferente para un arreglo de dos elementos
Considerando el arreglo de la figura 2.3, el cual consiste de dos antenas omnidi-reccionales con separación 4?, la salida del arreglo debido a la señal deseada es [1]:
yd(t)=Aei2*fot(w1 + w2). (2.6) La señal interferente n{t) exhibe un retraso de fase | en el sensor 2 con respecto al sensor 1. Por lo tanto la salida del sistema de antenas inteligentes debido a n(t) puede ser escrito como se cita en [1]
n(t)e3*[w
1¿ +;IÜIJ2] +n(t)e-^[w2ii +^2,2]- (2-7) Para que la salida del arreglo sea igual a s(t), es necesario que se cumplan las siguientes ecuaciones
wi,i + w2,i = !> (2-8)
tyi,2 + iü2i2 = 0, (2.9)
Resolviendo esta ecuación se tiene que el valor de los coeficientes es 1
Uii,i — 2 '
1
Wl,2 - g'
1 ' 2 '
1
™2,2 = ~ r
-(2.12) (2.13) (2.14) (2.15) Con los coeficientes complejos obtenidos, estos se sustituyen en una ecuación ge-neral que incluya la ganancia total del sistema de antenas inteligentes, para el caso de un arreglo linealmente uniforme el patrón de radiación normalizado en decibeles para un arreglo de M elementos con coeficientes complejos está dado por
G{8) = 10 log
\
A / - 1
wk exp(j2irkd sen 6/\t¿
fc=0
2\
(2.16)
donde w^ representa el /césimo coeficiente, w es el vector de coeficientes óptimos, d es la separación entre sensores, 9 es el ángulo deseado y Ao es la longitud de onda. En la
figura 2.4 se muestra el patrón de radiación para este ejemplo, donde el nulo es colocado en | radianes, que es la dirección del interferente y en la dirección de la señal deseada 0 radianes no existe atenuación, de aquí que el sistema de antenas inteligentes es capaz de separar la señal deseada s(t) de la interferente n(t) [4], radiando la máxima ganancia hacia la señal deseada.
\
I
i
1
/ \
i \
1
[image:26.616.234.458.495.673.2]-150 -100 -50 0 50 100 150 Ángulo Azimutal
Figura 2.4: Patrón de radiación de un sistema de antenas inteligentes
2.5 Enfoque de las Antenas Inteligentes
El sistema de antenas inteligentes es usado para preservar las características de una señal dentro de un espacio (rango de frecuencia) y para separar señales espacialmente, permitiendo que diferentes usuarios compartan los mismos recursos espectrales. Por lo anterior se dice que el sistema de antenas se puede representar como filtros espaciales y como técnicas de acceso múltiple respectivamente.
2.5.1 Acceso Múltiple de División de Espacio
Una red celular telefónica, donde se desea una gran cobertura geográfica y también un gran número de usuarios atendidos, implica que la región sea dividida en un número de células, con la finalidad de que la misma frecuencia portadora sea reusada en diferentes células. Lo anterior es una forma primitiva de la técnica de acceso múltiple por división de espacio, por su término en inglés Space División Múltiple Access (SDMA), donde las señales de comunicación son transmitidas en la misma frecuencia portadora, pero en diferentes células, que están separadas por una distancia espacial para reducir el nivel de la interferencia del cocanal [6]. La reciente aplicación del sistema de antenas inteligentes en este esquema es con la finalidad de separar a los distintos usuarios en una celda, con el mismo rango de frecuencia dentro de un limitado espectro de frecuencia.
2.5.2 Antenas como Filtros Espaciales
Las propiedades del sistema de antenas inteligentes hacen semejar su funcionamiento como las de un filtro espacial, el cual hace posible preservar la integridad de una señal dentro de un espacio mientras que las señales fuera de éste son rechazadas.
En condiciones ideales la dirección de procedencia es conocida, el ancho de lóbulo es infinitesimal además todos los interferentes caen fuera del haz principal y por lo tanto son totalmente atenuados.
Figura 2.5: Antenas inteligentes como filtros espaciales
2.6 Sistemas Analógico y Digitales
El sistema de antenas inteligentes de acuerdo al procesamiento y características de la señal se denominan como sistemas analógico y digital. El sistema de antenas inteli-gentes analógico se basa principalmente en recibir una señal desde una dirección dada o transmitir esa señal hacia esa dirección y la salida del arreglo de sensores puede ser analizada por varias formas de procesamiento de señales, donde la fase y la amplitud son ajustadas para producir la salida que puedan proporcionar la información angular para cada señal que arriba de distintas direcciones del espacio. La red que controla la fase y amplitud de la corriente de excitación es usualmente llamada red formadora de haces.
El sistema de antenas inteligentes digital está basado en la captura de señales de ra-dio frecuencia (RF) del arreglo de sensores, convirtiéndolas en dos paquetes binarios de señales, que representan los canales de banda base I y el otro de banda Q. Básicamente consiste en un arreglo de elementos de antenas, con un receptor independiente para cada elemento de antena y un procesador digital de señales [1].
Las ventajas del sistema de antenas inteligentes digital son:
• Captura la información de RF en forma de paquetes digitales. La señal digital banda base representa la amplitud y la fase de la señal recibida en cada elemento receptor.
• Ajusta las amplitudes y las fases de las señales digitales que son adicionadas a la señal deseada para formar el haz deseado.
• La exactitud de transformar la señal analógica en términos digitales.
• Es más inerte o más flexible a cualquier intento de degradación de la relación señal a ruido.
2.7 Arquitectura de las Antenas Inteligentes
La habilidad del sistema de antenas inteligentes para reducir el desvanecimeinto de la señal recibida puede ser limitada debido a la multipropagación en el canal de radio, a un gran número de interferentes o cuando el ruido tiene un valor alto. Para mejorar la recepción de la señal y evitar el desvaneciemiento de esta señal varias arquitecturas o escenarios del sistema de antenas inteligentes son propuestos, que a continuación se describen como son citados en [7]
Conmutación de Haz Cada patrón de radiación tiene un haz principal con lóbulos laterales muy pequeños. Cada arreglo sirve a todos los usuarios que se encuentren en la misma zona. La asignación de un haz se hace en incrementos discretos,
cuando un usuario deja la zona de una antena un nuevo arreglo es prendido antes de apagar el anterior. Este sistema es fácil de implementar, porque requiere únicamente una red formadora de haces y un conmutador de RF para seleccionar el mejor patrón de radiación.
Generador de Haces El generador de haz dirige un haz virtual hacia el usuario de-seado mientras que los interferentes reciben un nulo, esto lo realiza calculando los coeficientes a la salida de cada uno de los sensores y después son sumados y la salida es procesada.
Diversidad de Espacio El concepto de diversidad de espacio está encaminado a re-ducir el desvanecimiento en las señales de distintas trayectorias. El desvaneci-miento de la señal recibida en la estación base no puede ser el mismo en dos arreglos de sensores al mismo tiempo, por lo tanto el sistema escoge la señal con mejor calidad de estos arreglos. Esta técnica es fácil de implementar cuando los desvanecimientos en las señales no están correlacionados.
Técnicas de diversidad y combinación Estas técnicas de diversidad espacial son una aproximación efectiva para combatir el efecto de desvanecimiento por multi-propagación. Dichas técnicas son usadas en el receptor (o transmisor) de dos o más antenas que están separadas suficientemente para envolver su desvanecimien-to de correlación. Algunas técnicas de diversidad y combinación son: diversidad conmutada donde el sistema conmuta entre una antena y otra, es decir, una y solo una es usada en un instante del tiempo. El criterio que utiliza se basa en la detección de la pérdida del nivel de intensidad de una señal, diversidad selectiva
donde el sistema puede monitorear el nivel de intensidad de la señal en todas las antenas simultáneamente y seleccionar la de mayor intensidad en un instante de tiempo y combinación de igualdad de ganancias donde la señal de cada antena son combinadas para tener acceso a todas las fases de las señales y tener un punto común de referencia.
2.8 Beneficios a Redes Inalámbricas
El sistema de antenas inteligentes ofrece un amplio rango de caminos para mejorar el desempeño de los sistemas inalámbricos. En general el sistema de antenas inteli-gentes tiene el potencial para incrementar la capacidad del sistema, reducir costos de infraestrucutura, mejorar el desempeño de los enlaces en el sistema. En particular el proposito del sistema de antenas inteligentes es mejorar la calidad de la señal en los sistemas de radio incrementando la capacidad del reuso de frecuencia, esto lo reali-za empleando un procesador de tiempo espacio que es capaz de formar haces para la transmisión/recepción hacia el móvil de interés. Al mismo tiempo, le es posible colocar
los nulos espaciales en la dirección de las interferencias no deseadas [5]. Los beneficios derivados al emplear el sistema de antenas inteligentes son
[image:30.612.243.418.197.349.2]Incremento en la ganancia de la antena El sistema de antenas inteligentes forma haces para la transmisión y la recepción como se muestra en la figura 2.6. El incremento de ganancia puede ser usado para incrementar la cobertura efectiva o para incrementar la sensibilidad del receptor, los cuales pueden explotarse para reducir la potencia de transmisión y la radiación electromagnética en la red.
Figura 2.6: Reuso del canal por separación angular
Decremento en la Interferencia entre Símbolos La multipropagación en medios de radios móviles guía hacia la interferencia entre símbolos (ÍES). Usando los haces de transmisión y de recepción dirigidos hacia los móviles de interés se reduce la cantidad de multipropagación y la ÍES.
Decremento en la interferencia cocanales La antena transmisora del sistema de antenas inteligentes emite menos interferencia, porque únicamente envía la po-tencia necesaria de RF en la dirección deseada. De aquí que la antena receptora del sistema de antenas inteligentes pueda rechazar la interferencia buscando la dirección de la señal deseada.
2.8.1 Antenas Inteligentes en Sistemas de Radio Celular
El sistema de antenas inteligentes puede ser usado para mejorar la calidad de la señal e incrementar la capacidad en sistemas de radio celular. Comúnmente estos sistemas usan la diversidad espacial, conmutando entre una o más antenas receptoras para mejorar la calidad de la señal. Empleando el sistema de antenas inteligentes en estaciones base de sistemas de radio celular, se permite manipular los haces generados para cada móvil, o grupo de móviles, como se ilustra en la figura 2.7 para un sistema celular con un cluster
de tamaño cuatro.
Figura 2.7: Sistema celular con un cluster de tamaño cuatro
A continuación se mencionan algunos beneficios al implementar el sistema de an-tenas inteligentes en la estación de la base del sistema de radio celular.
• El arreglo proporciona diversidad espacial con lo que se reduce los efectos de desvanecimiento causados por la multipropagación.
• La eficiencia de potencia es mejorada por el uso óptimo de la ganancia de la antena permitida.
• El patrón de radiación nulo puede ser generado y radiado hacia las fuentes de interferencia de las celdas cocanales, mejorando la relación señal a ruido recibida en la estación base.
Son necesarias muchas las aplicaciones del sistema de antenas inteligentes para solucionar la complejidad de las comunicaciones inámbricas ahora existentes. El sistema de antenas inteligentes debe ser integrado con equipos de sitios celulares convencionales para funcionar como filtros espaciales adaptables que rindan un incremento en la calidad de la señal, capacidad, y más rango de cobertura de las antenas [5].
2.9 Resumen
En este capítulo se definió el sistema de antenas inteligentes, se describió la operación de sus elementos principales y en general las distintas arquitecturas del sistema de antenas
intelignetes. Además se incluye el análisis del formador de haces cuya función es la de estimar la DDA y el vector de coeficientes complejos, se observa que el formador de haces se basa en el modelo general de la señal a la salida del arreglo de sensores. Por último se mencionan algunos beneficios que se obtienen al implementar el sistema de antenas inteligentes en los sistemas inalámbricos.
21
Capítulo 3
Arquitectura para el control del
vehículo
Desde el punto de vista de un piloto humano, el control de un vehículo requiere del volante de dirección y del acelerador. Si el objetivo es sustituir al humano por un controlador; entonces, la arquitectura de control debe establecer una configuración que permita al controlador manipular la dirección y la velocidad, además de cerrar el lazo de control, retroalimentando la posición del vehículo.
En este capítulo se propone una arquitectura, la cuál establece la configuración de todos los elementos involucrados en el control del vehículo. El vehículo que se quiere controlar, cuenta con dos motores de corriente directa en paralelo para avance y retroceso, además, otro motor de corriente directa para manipular la dirección; también cuenta con dos sensores, uno para medir la orientación de las llantas delanteras, y otro para medir la posición y velocidad.
Todos los módulos eléctricos y electrónicos que componen la arquitectura se describen en este capítulo; entre ellos, los más importantes son, la tarjeta de control del motor de dirección, y la tarjeta para el control de velocidad; estas tarjetas incluyen una etapa de potencia para manipular los motores y un circuito de acondicionamiento para obtener las señales de los sensores. Además, la arquitectura se compone de la unidad de procesamiento y el módulo de comunicación inalámbrica. Los algoritmos para el control de velocidad y dirección se explican a detalle en el siguiente capítulo.
3.1 Estructura y módulos de la arquitectura
Capítulo 3: Arquitectura para el control del vehículo
22
sensores del vehículo.
Sensor de dirección Motor de dirección Computadora Control de Trayectoria
Control de Dirección Radio Frecuencia
Vehículo
Vehículo
Usuario
Usuario
Control a un Punto
Potencia y Acondicionamiento Sensor de velocidad Motor de velocidad
Control de Velocidad
Potencia y Acondicionamiento
Unidad de Procesamiento
Cálculo de la Posición del Vehículo Modem
[image:34.612.47.500.90.417.2]Modem
Figura 3.1: Diagrama a bloques de los módulos que componen la arquitectura de control en términos de electrónica y flujo de señales del vehículo
A continuación se hará una breve descripción de cada uno de los bloques; por ahora, sólo se describirán los bloques que se encuentran dentro del vehículo.
La unidad de procesamiento procesa los comandos que recibe del usuario, ya sea para definir la trayectoria, sintonizar los controladores o iniciar la ejecución de la trayectoria.
El controlador de trayectoria verifica la posición actual para determinar cuál es el siguiente punto a seguir de la trayectoria y lo envía como referencia al controlador a un punto. Cuando se llega al último punto, este controlador envía un comando para detener el vehículo al control de velocidad.
El controlador de velocidad se encarga de alcanzar y mantener el vehículo a la velocidad deseada y envía señales a la etapa de potencia en la tarjeta de velocidad para que, a su vez, mueva los motores de avance. Este controlador, cierra el lazo con la señal que envía el sensor de velocidad a través del circuito de acondicionamiento en la tarjeta.
23
delanteras, para minimizar el ángulo de error entre el vehículo y el punto. Finalmente envía al control de dirección el ángulo de giro requerido, como referencia.
El controlador de dirección inclina las llantas de dirección al ángulo requerido; además envía señales a la etapa de potencia en la tarjeta de dirección para que, a su vez, mueva el motor de dirección. El controlador de dirección, cierra su lazo con la señal que envía el sensor de dirección a través de la tarjeta de acondicionamiento.
El cálculo de la posición del vehículo se realiza con base en las señales de los sensores de dirección y velocidad, utilizando un algoritmo que realiza una estimación de los parámetros del vehículo, basado en las ecuaciones cinemáticas. Este es uno de los módulos más importantes, ya que la posición que se calcula en este módulo es la que se utiliza para cerrar el lazo de control de trayectoria y el control a un punto. El cálculo se realiza en la unidad de procesamiento; en el Capítulo 4 se hace una descripción detallada de este módulo.
La configuración de la arquitectura propuesta, es modular y permite hacer cambios en el algoritmo de los controladores, sin alterar los demás controladores. Para que el usuario pueda modificar u observar los parámetros del vehículo, tiene que haber un módulo que se encargue de entablar una comunicación con el vehículo desde un lugar estacionario, mientras que el vehículo efectúa las tareas que se le ordenaron. Dicha comunicación debe de ser inalámbrica para que el vehículo pueda moverse libremente en su área de trabajo.
3.2 Instrumentación del vehículo
En el capítulo anterior se obtuvo el modelo del sistema de dirección y velocidad; sin embargo las ecuaciones de transferencia están en términos de un voltaje en la entrada, contra una variable física en la salida. Los controladores que se proponen en la arquitectura de control se basan en el uso de microcontroladores para su implementación; por lo tanto, las variables son únicamente datos digitales almacenados en la memoria del microcontrolador. Se requiere de algún instrumento que convierta los datos digitales calculados, en voltajes para que funcionen los motores y convierta las variables físicas de salida, en datos digitales para que los reconozca el controlador.
Capítulo 3: Arquitectura para el control del vehículo
24
3.2.1 Etapa de potencia en tarjetas de control
El propósito de la etapa de potencia, es entregar suficiente energía a los motores de corriente directa con que cuenta el vehículo. Como se dijo anteriormente, la tarjeta para control de dirección y la de velocidad utilizan el mismo principio de funcionamiento, motivo por el cuál, se hace la explicación generalizando para las dos tarjetas.
Puente H, sentido de giro del motor
Para el control de los motores se utilizó la configuración puente H, cuyo objetivo es girar un motor de corriente directa en los dos sentidos, la inversión del giro se logra al cambiar la polarización de las bobinas del motor, para invertir el flujo de corriente a través del motor.
El circuito básico se muestra en la figura 3.2. El principio de operación indica que sólo es posible cerrar los interruptores S1-S4 ó S3-S2 a la vez. Al cerrar S1 y S4 el motor se polariza con V+ en el lado izquierdo y tierra del lado derecho, provocando que la corriente fluya de izquierda a derecha. Si se activan S3-S2, el V+ aparece del lado derecho y tierra del lado izquierdo del motor, por lo tanto, la corriente fluye de derecha a izquierda provocando un giro del motor en sentido contrario.
M
S1S2
S3
S4
i
V+
M
S1S2
S3
S4
i
V+
Figura 3.2: Los dos estados posibles en el puente H. Cuando los contactos S1 y S4 se encuentran cerrados el motor gira en un sentido; mientras que con S2 y S3
cerrados, el giro es en sentido contrario
En la práctica los interruptores se sustituyen por transistores o relevadores que realizan la conmutación. En el Anexo X se incluye el diagrama eléctrico de las tarjetas para el control de los motores de dirección y de velocidad en el vehículo de pruebas.
PWM, aplicación de potencia
25
variando la potencia que recibe el motor. Una forma de variar la velocidad, es cambiando el voltaje de alimentación, pero es necesario que el microcontrolador realice esta tarea, además un convertidor digital análogo no podría entregar la potencia necesaria. Por ello se utiliza una técnica llamada “Modulación de Ancho de Pulso” o “PWM” por sus siglas en inglés.
Las señales PWM son señales de voltaje con un período constante, donde se cambia el ciclo de trabajo. Así, la potencia que recibe el motor es directamente proporcional al ciclo de trabajo de la señal. De este modo se realiza un barrido de 0% a 100% de potencia entregada al motor.
El ciclo de trabajo se calcula con la siguiente ecuación:
=
T t
DC H
100
% (3.1)
donde %DC es el ciclo de trabajo, tH es el tiempo en nivel alto, T es el período de la señal.
En la figura 3.3 se muestran ejemplos de señales PWM con diferentes ciclos de trabajo. Si esta señal se utiliza para conmutar los interruptores del puente H, se variará la velocidad del motor además del sentido de giro.
25%
50%
75% Ciclo de trabajo:
Voltaje promedio 25%
Voltaje promedio 50%
Voltaje promedio 75%
Figura 3.3. Ejemplo de señales PWM. La señal permanece en estado alto un 25%, 50% y 75% del tiempo, entregando ese mismo porcentaje de voltaje en promedio
En la práctica, las señales de PWM se utilizan con un período de tiempo pequeño, comparado con la constante de tiempo del actuador, de tal forma que no alcance a responder a los pulsos, pero sí a un voltaje promedio.
3.2.2 Sensado y acondicionamiento de dirección
Capítulo 3: Arquitectura para el control del vehículo
26
muestreo; el acondicionamiento en la señal, tiene ese propósito.
Existen muchas técnicas para medir desplazamiento angular; entre las más utilizadas en el área de robótica están los potenciómetros y los codificadores ópticos.
Los codificadores ópticos absolutos entregan una salida digital de “n” bits, según la resolución. Se componen principalmente de un disco opaco con perforaciones que permiten o impiden el paso de la luz. Dichas perforaciones se colocan de tal forma que se pueda obtener un código conocido, ya sea binario, BCD, Gray, etc., conforme se gira el disco [Dieck 2000]. La figura 3.4 muestra un ejemplo de un codificador óptico absoluto de tres bits.
3 Sensores ópticos
Figura 3.4: Ejemplo de codificador óptico absoluto de tres bits en código binario. El ángulo actual se obtiene con una resolución de 45 grados
El problema, con este tipo de sensores, es que si se requiere una resolución mayor, el tamaño del disco crece y su costo aumenta. Por ejemplo, para una resolución de 8 bits, se requerirían ocho sensores ópticos y el disco estaría dividido en 256 pasos, para lo cuál, se requiere de mucha precisión y su construcción es dificil de obtener con métodos sencillos.
Por otro lado, los potenciómetros son más sencillos de conseguir y se puede obtener una mayor resolución a un costo menor. El potenciómetro se compone de una resistencia con un devanado central que recorre todo el rango. La salida es una señal análoga contínua y no está discretizada, por lo tanto, la resolución depende directamente del método que se utilice para digitalizar esta señal. Aquí se requiere que la tarjeta de adquisición de datos contenga un convertidor análogo-digital para discretizar la señal. En el vehículo que se utilizó, el motor de dirección ya contaba con un potenciómetro dentro del mismo encapsulado. Este potenciómetro se utilizó para medir el ángulo de la dirección. En el Anexo X se incluye el diagrama del circuito de adquisición con un convertidor análogo-digital, utilizado para convertir la señal del potenciómetro.
27
encapsulado del motor que manipula la dirección, por lo que, el sensor mide la posición de la flecha del motor y no la inclinación real de las llantas delanteras. En el Capítulo 2, se hizo un análisis de la histéresis que produce el mecanismo de dirección.
Para calcular el valor del voltaje de salida se utiliza la siguiente ecuación:
1 2 1 R R R V Vsalida + = (3.2)
En la figura se observa, que para la posición central de las llantas, esto es, cuando el vehículo se dirige en línea recta, el devanado se encuentra en el centro, por lo tanto, R1 es igual a R2, provocando que el voltaje de salida sea igual a la mitad del voltaje aplicado. Si la señal de voltaje de salida se digitaliza usando un convertidor análogo-digital de 8 bits, el valor digital en la posición central, sería un 80 hexadecimal, cuando el valor equivalente del ángulo en las llantas delanteras: φ, sería igual a cero.
+ -Vsalida V+ Posición central
V+
V
salidaR
2R
1 Circuito equivalente:Figura 3.5: Configuración para medir ángulo con un potenciómetro. El voltaje en la salida depende directamente del ángulo que forma el devanado central.
3.2.3 Sensado y acondicionamiento de velocidad
Referente al sensado de avance y velocidad, también existen diferentes esquemas que podrían implementarse; sin embargo, los más utilizados en robótica son los codificadores incrementales, puesto que producen directamente una salida digital cuando miden desplazamientos. En este caso, no se utilizan convertidores análogo-digital, ya que la salida es inherentemente digital y puede ser acumulada por un contador o en la misma unidad de procesamiento principal. La transducción de movimiento se realiza usando tres mecanismos de codificación posible: codificadores magnéticos, codificadores ópticos, codificadores por escobillas [Dieck 2000]; sin embargo, el principio de funcionamiento es el mismo.
Capítulo 3: Arquitectura para el control del vehículo
28
absolutos es que no se tiene un código de la posición, sólo indica si hay o no movimiento y por medio de su frecuencia se determina la velocidad del movimiento.
Al contar con una segunda señal desfasada 90°, se conoce también la dirección del movimiento, al medir las transiciones en la salida de los sensores y verificando cuál señal adelanta a la otra. Un ejemplo de codificador óptico incremental con dos señales en cuadratura se presenta en la figura 3.6.
Sensor A Sensor B
Salida:
Sensor A:
Sensor B:
CMR
CMR FMR
[image:40.612.124.413.185.450.2]FMR
Figura 3.6: Codificador óptico incremental, con dos señales desfasadas, para obtener la dirección del giro. Durante el movimiento a favor de las manecillas del reloj, la señal del sensor B adelanta a la de A, en contra de la manecillas del reloj, la señal del sensor A adelanta a la de B
Si se mide la cantidad de pulsos generados por unidad de tiempo se obtiene la velocidad. En el vehículo se utilizó un codificador óptico incremental, con dos canales en cuadratura, para medir la distancia recorrida así como la velocidad.
El cálculo de la distancia recorrida se realiza usando el número de pulsos que se generan por vuelta de llanta, si además se conoce el perímetro de la llanta, se puede calcular la distancia recorrida por cada pulso.
Np P D= llanta
(3.3)
29
número de pulsos por vuelta de llanta.
En el Capítulo 4, se explica cómo con el valor de distancia y posición en la dirección, se puede hacer una estimación del cambio en la posición y orientación del vehículo en el plano.
El cálculo de la velocidad, se hace usando el mismo sensor, pero con un algoritmo diferente. Se cuenta el número de pulsos detectados en el codificador, dentro de una ventana de tiempo. Si se conoce la distancia que se recorre por cada pulso y se conoce el tamaño de la ventana de tiempo, entonces se puede calcular la velocidad. La ecuación para el cálculo de la velocidad queda de la siguiente manera:
D T P V
v c
= (3.4)
donde V es la velocidad del vehículo, Pc es el número de pulsos contados, Tv es el tiempo que transcurre y D es la distancia recorrida por cada pulso.
Para determinar si el vehículo está avanzando o retrocediendo, se utiliza la segunda señal del codificador. Al momento en que se detecta un pulso positivo en la señal A, se mide el valor de la señal B, si se encuentra en estado alto, significa que el vehículo avanza, y si está en estado bajo, significa que el vehículo retrocede.
3.3 Unidad de procesamiento
El vehículo requiere de un dispositivo con capacidad de procesamiento para ejecutar los algoritmos de control, procesar las señales de los sensores, recibir los comandos del usuario, etc. Regularmente se utiliza una computadora para satisfacer las necesidades de procesamiento, las cuáles incluyen capacidad de memoria, equipos periféricos de entrada salida y puerto serial principalmente.
La arquitectura propuesta se basa en el uso de microcontroladores, ya que integran todas estas funciones en una sola pastilla. Se utilizan principalmente en aplicaciones específicas y dedicadas. Los más comunes cuentan con memoria integrada, puertos para entrada y salida, puerto serial, atención a interrupciones externas y contadores. Los más nuevos cuentan ya con convertidores análogo digital, salidas con PWM, comparadores análogos, etc, todo en un mismo circuito integrado.
Capítulo 3: Arquitectura para el control del vehículo
Capítulo 4
Red Neuronal
El problema de estimar la dirección de arribo y el vector de coeficientes en el sistema de antenas inteligentes son difíciles de implementar computacionalmente porque sus so-luciones no siguen algún proceso secuencial. Estos problemas basan su funcionamiento en datos complejos y por lo general estos datos no tienen ninguna función que describa su comportamiento y además esta información puede contener ruido.
La red de retropropagación es de gran utilidad para este tipo de problemas ya que realiza funciones no triviales de mapeo de datos complejos, por lo tanto en esta tesis la red de retropropagación se emplea para estimar la dirección de arribo de las señales y el vector de coeficientes óptimos.
En este capítulo se presenta los conceptos de la red de retropropagación, su fun-cionamiento, su arquitectura y principales parámetros de operación.
4.1 Modelo de la Neurona
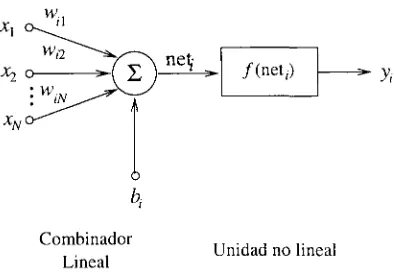
Una red neuronal está formada de un gran número de unidades de procesamiento no lineales interconectadas, también denominadas nodos o neuronas. La figura 4.1 muestra el modelo artificial de una neurona, el cual consiste de un combinador lineal seguido de una unidad no lineal y la ecuación 4.1 representa la entrada neta a la unidad no lineal y está descrita como
net¿ = "^WijXj + bi (4.1)
j
donde WÍJ es el conjunto de coeficientes ajustables, Xj es el vector de entrada a la unidad y bi es una entrada externa de polarización [12].
La ecuación 4.1 es de gran importancia en las redes neuronales porque frecuen-temente un gran número de nodos están interconectados entre sí y el desempeño de cualquier red neuronal depende de la velocidad con el cual se realize el cálculo de la entrada de un nodo hacia otro.
Combinador
[image:44.612.216.413.65.203.2]Lineal Unidad no lineal
Figura 4.1: Modelo simplificado de una neurona
4.2 Red de Retropropagación
Una de las características de las redes neuronales es el paralelismo para reducir el tiempo requerido para determinar la relación entre un conjunto de entradas y un conjunto de salidas. Una red neuronal es denominada también red de mapeo si es capaz de establecer alguna relación funcional entre su entrada y su salida [14].
El método de retropropagación ha sido uno de los algoritmos con más influencia en la clasificación de patrones en las redes neuronales. La red de retropropagación es similar al algoritmo del mínimo error cuadrático en el que se minimiza el error cuadrático medio entre la señal deseada y la salida actual de la red con respecto a un conjunto de coeficientes. La regla de aprendizaje en la red de retropropagación es el algoritmo del descenso por gradiente compuesto de dos pasos [15]:
a) Propagación de la activación hacia adelante, en el cual el patrón de entrena-miento es propagado hacia adelante a través de la red y la activación de los valores son calculados.
b) Propagación del error hacia atrás, en el cual la salida de los valores activados son comparados con los valores deseados y el error de la señal para cada neurona en la capa de salida es propagado hacia atrás lo cual permite un cálculo recursivo de los pesos y el ajuste de los mismos en cada capa.
4.2.1 Funcionamiento de una Red de Retropropagación
La red aprende un conjunto predefinido de datos de entrada y de salida dados como ejemplo, empleando un ciclo de propagación/adaptación. Una vez que que se aplica un conjunto de entrada como estímulo para la primera capa de unidades de la red, éste se va propagando a través de todas las capas superiores hasta generar una salida. La señal de salida se compara entonces con la salida deseada, y se calcula una señal de error para cada unidad de salida.
Las señales de error se transmiten entonces hacia atrás, partiendo de la capa de salida, hacia todos los nodos de la capa intermedia que contribuyen directamente a la salida. Las unidades de la capa intermedia sólo reciben una fracción de la señal total de error. Este proceso se repite, capa por capa, hasta que todos los nodos hayan recibido una señal de error que describa su contribución relativa al error total. Basándose en la señal de error percibida, se actualizan los pesos de conexión de cada unidad, para hacer que la red converga hacia un estado que permita codificar todo el conjunto de entradas.
La importancia de este proceso consiste en que, a medida que se entrena la red, los nodos de las capas intermedias se organizan así mismos de tal modo que los distintos nodos aprenden a reconocer distintas características del espacio total de entradas [14].
4.2.2 Regla Delta
El algoritmo de aprendizaje de la red de retropropagación es la regla delta. La figura 4.2 sirve como referencia para la mayoría de las descripciones. La red de retropropagación es una red formada de capas, con propagación hacia adelante, que está completamente interconectada entre capas, no hay conexiones de retroalimentación ni conexiones que salten una capa para ir directamente a una capa anterior. El aprendizaje, en una red neuronal, significa hallar un conjunto adecuados de pesos [14].
Capa de Capa Capa de entrada oculta salida
Figura 4.2: Arquitectura de una red de retropropagación
Las ecuaciones para el procesamiento de información que hay en una red de re-tropropagación se describe a continuación, se aplica un vector de entrada Xi,x2, ...,xN en la capa de entrada de la red. Las unidades de entrada distribuyen los valores a las unidades de la capa oculta. La entrada neta de la unidad i está dada por
ij°j: (4-2)
i
donde Wy es el paso de la conexión que sale de la unidad j y llega a la unidad i. La salida de la unidad i está dada por
Ol = /¿(neti). (4.3)
Si las unidades reciben como entrada elementos del vector x implica que su salida es igual a la entrada, es decir, o¿ = net¿ [16]. La función /¿ es no decreciente y dife-renciable, y esta es denominada función de tranferencia la cual se debe activar para que la neurona produzca una salida. Las funciones de transferencia más importantes y comunes son las siguientes [17]:
• Sigmoidal:
/(net) = - -. (4.4) Jy ' 1 + e"net
La derivada de la función sigmoidal se puede obtener como
/'(net) = /(net)(l-/(net)). (4.5)
• Tangente hiperbólica
/(net) = tanh(net). (4.6)
El conjunto inicial de valores de pesos representa una primera aproximación de los pesos correctos del problema. El procedimiento básico para entrenar la red está plasmado en la siguiente descripción [14]:
1. Se aplica un vector de entrada a la red, y se calculan los correspondientes valores de salida.
2. Se comparan las salidas obtenidas con las salidas correctas, y se determina una medida de error.
3. Se determinan en que dirección debe cambiar cada peso con objeto de reducir el error.
4. Se determina la cantidad en que es preciso cambiar cada peso.
5. Se aplican las conexiones a los pesos.
6. Se repiten los pasos del 1 al 5 con todos los vectores de entrenamiento hasta que el error para todos los vectores del conjunto de entrenamiento quede reducido a un valor aceptable.
4.2.3 Error
El error del vector de entrada k es e^ = (dk — yk), en donde la entrada deseada es
dk y la salida real es y¿. Se define el error de una sola unidad de salida en la forma
epk = (l/pk — o
pk), en donde el subíndice p se refiere al vector p de entrenamiento y k se
refiere a la unidad k de salida. El error se minimiza por la suma de los cuadrados de los errores de todas las unidades de salida:
i M
E
P= ^E4k- (4-7)
z k=i
Para determinar el sentido en que se deben cambiar los pesos, se calcula el valor negativo del gradiente Ep con respecto a los pesos Wkj. Después se ajustan los valores de los pesos de tal forma que se reduzca el error total.
Si el patrón que se acaba de presentar es xfc, d^. Se quiere encontrar una regla de
aprendizaje que realice un descenso por gradiente en la curva del error E(W), es decir, se busca que el cambio en los elementos de la matriz W sea proporcional al negativo de la derivada parcial del error del último patrón presentado respecto a los elementos de la matriz W , donde la regla de aprendizaje es [16]:
= rjójOi, (4.8)
donde
i \^j wi;jjv"^tj), si; j'es una unidad de salida;
ÓJ = S *>f^ ^ ^ x , ,
s i n o i4-9)
donde r¡ es una constante que determina la velocidad de aprendizaje.
4.2.4 Constante de Aprendizaje
La palabra aprendizaje significa la modificación de los pesos de las conexiones entre los nodos de una red neuronal.
El factor r¡ se denomina parámetro de velocidad de aprendizaje. El cual es positivo y menor de 1. La selección de un valor para el parámetro de aprendizaje, r¡, tiene un efecto significativo en el rendimiento de la red. Un valor pequeño de 77 significa que la red tendrá que hacer un gran número de iteraciones.
4.2.5 Momento
Una forma de incrementar la velocidad de convergencia consiste en utilizar una técnica llamada momento. Para mejorar el desempeño de la regla de aprendizaje de retropro-pagación se utiliza el momento que tiene el efecto de hacer que el peso se siga moviendo
en la dirección en la que se movió en los ciclos anteriores de aprendizaje. El término momento se implementa de la siguiente manera:
(t + 1) = rjSjOi + aAuji(t). (4.10) El uso del momento tiene dos efectos. Primero, los pesos tienen una aceleración en zonas donde el gradiente del error es pequeño. Segundo, los pesos pueden pasar sobre pequeñas "lomas" en la curva del error debido a la velocidad que gana antes de llegar a cada loma [17].
4.3 Importancia de la Red de Retropropagación
Los algoritmos convencionales como el MUSIC y la ecuación de Wiener-Hopf requieren de un comportamiento idéntico y desempeño estable de los elementos del sistema de antenas inteligentes. Estos algoritmos usualmente no aceptan cambios en el compor-tamiento de las antenas y depende de elementos idénticos, porque el procesamiento de cada uno se vuelve complejo cuando el comportamiento de los elementos no es li-neal, por otra parte requieren de condiciones ideales del medio de propagación para un desempeño estable. En constraste la red neuronal de retropropagación realiza las funciones de estos algoritmos, sin importar las condiciones del medio de propagación, del comportamiento de los sensores y de la variación en las características de la señal [13], debido a su característica de paralelismo en su funcionamiento.
4.4 Resumen
En este capítulo se menciona de manera general el modelo de la neurona (elemento principal en la formación de una red neurona), también se da una breve descripción de la red neuronal de retropropagación, su funcionamiento, su regla de aprendizaje y de otros parámetros de operación necesarios para un eficiente funcionamiento de la red neuronal (momento y constante de aprendizaje), y el capítulo concluye mencionando la importancia de implementar las redes neuronales en el sistema de antenas inteligentes.
Capítulo 5
Resultados
En este capítulo se presenta la manera en que se estimó la dirección de arribo de la señal incidente, el vector de coeficientes óptimos para radiar el patrón de radiación mediante los algoritmos tradicionales y la forma de implementar las redes neuronales para estimar estos parámetros. Las simulaciones desarrolladas suponen que el enlace de comunicación tiene como origen al usuario y como destino la estación base donde se estima la DDA y el vector de coeficientes óptimos para emitir el patrón de radiación. En este tipo de enlace el usuario utiliza una antena transmisora y la estación base está equipada con el arreglo de antenas.
El capítulo empieza con el análisis general de la señal generada por el usuario en el campo lejano del patrón de radiación del arreglo de antenas. Posteriormente se deter-mina la DDA de la señal incidente en el arreglo de sensores por medio del algoritmo de alta resolución MUSIC, después se estima el vector de coeficientes óptimos utilizando la ecuación de Wiener-Hopf y por último se analiza el desempeño del funcionamiento de las redes neuronales implementadas para estimar la DDA y el vector de coeficientes óptimos. Asimismo se realiza una comparación del desempeño de los algoritmos tra-dicionales con respecto al desempeño de las redes neuronales en condiciones no ideales del medio ambiente.
5.1 Modelo de la Señal Analítica
El estimar la DDA de la señal incidente y el vector de coeficientes óptimos en el sis-tema de antenas inteligentes implica que el arreglo de antenas contenga M elementos omnidireccionales inmersos en un medio homogéneo en el campo lejano del patrón de radiación, en el cual arriban L fuentes de señales senoidales no correlacionadas de fre-cuencia central /o, estos elementos deben estar equiespaciados a una distancia d a la alineación del eje x, tal que el primer elemento es situado en el origen, por lo que el retardo en cualquier otro sensor con respecto al primero de acuerdo a la figura 3.1 es
rm(9i) = - (M - 1) sen 0¿. (5.1)
Como la señal incidente s(t) es de banda angosta implica que el retardo en tiempo r corresponde al cambio de fase de la señal i y este es,
^ sen 6i. (5.2)
Además para representar las señales que inciden en el arreglo de sensores, ex-plícitamente en el sensor de referencia debido a la fuente i, esta señal se expresa nor-malmente en notación compleja como
Si(t) e^/ o í, (5.3)
donde s¿(í) denota la función compleja de modulación. Esta función se representa de forma distinta de acuerdo a la técnica de acceso múltiple que esté utilizando el sistema de antenas inteligentes y esta función tiene una de las siguientes formas
• Acceso múltiple por división de frecuencia
Si{t) = A{e?m (5.4)
donde Ai denota la amplitud recibida en el sensor i y (p(t) denota el mensaje de la señal.
• Acceso múltiple por división de tiempo
Y
n
T
) (5.5)
donde di{n) es la secuencia de datos complejos, p(t) es el pulso de muestreo y T
es el intervalo de muestreo.
• Acceso múltiple por división de código
Si{t) = di(t)r]{t) (5.6)
donde di(t) es la secuencia del mensaje y r¡(t) es la secuencia de ruido binaria pseudo aleatoria, con valores ( — 1,-1-1).
En general la función de modulación es normalmente modelada como un proceso complejo de media cero y varianza igual a la potencia de la fuente, medida en el elemento de referencia. Por lo tanto, la señal total inducida xi en todos los elementos del arreglo debido a las fuentes direccionales L y al ruido inherente en el sensor m es
¿=1