UNIVERSIDAD DE ORIENTE NÚCLEO DE MONAGAS
DEPARTAMENTO DE INGENIERÍA DE SISTEMAS SUB-COMISIÓN DE TRABAJO DE GRADO
CURSO ESPECIAL DE GRADO
AUTOMATIZACIÓN Y CONTROL DE PROCESOS INDUSTRIALES MATURÍN / MONAGAS / VENEZUELA
DISEÑO DE UN ROBOT MÓVIL PARA LABORES DE FUMIGACIÓN DE PLANTAS DE TOMATE EN AMBIENTE DE CASAS DE CULTIVO
Proyecto de Seminario de Grado, en Modalidad Curso Especial de Grado, Área de Automatización y Control de Procesos Industriales, presentado como
requisito parcial para optar al título de Ingeniero de Sistemas
Asesor Académico: Autores: Ing. Judith Devia Br. González Q. Juan M. CI. 18.325.757 Br. Martínez G. Carlos D. CI. 19.232.194
ii
UNIVERSIDAD DE ORIENTE NÚCLEO DE MONAGAS
DEPARTAMENTO DE INGENIERÍA DE SISTEMAS SUB-COMISIÓN DE TRABAJO DE GRADO
CURSO ESPECIAL DE GRADO
AUTOMATIZACIÓN Y CONTROL DE PROCESOS INDUSTRIALES MATURÍN / MONAGAS / VENEZUELA
DISEÑO DE UN ROBOT MÓVIL PARA LABORES DE FUMIGACIÓN DE PLANTAS DE TOMATE EN AMBIENTE DE CASAS DE CULTIVO
Autores:
Br. González Q. Juan M. C. I.: 18.325.757 Br. Martínez G. Carlos D.
C. I.: 19.232.194
ACTA DE APROBACIÓN
APROBADO POR:
____________________ Profa. Judith Devia Asesor Académico
_______________ ________________ Prof.Jesús Chaparro Prof. Edgar Goncalves
Jurado Principal Jurado Principal
iii
DEDICATORIA
Este trabajo está dedicado en primer lugar a toda mi familia que siempre me apoyó durante el desarrollo, no solo de este trabajo final sino de toda mi carrera estudiantil, en especial a mi madre Roselys, a mi padre Juan Antonio y a mi hermano Diego, los amo.
A todos los amigos que me han acompañado a lo largo de mi vida, en mis momentos buenos y malos, a mi gente de Cumaná que ha crecido conmigo y sigue siendo parte fundamental de mi vida y a mis amigos de Maturín que han pasado de ser compañeros de estudio y vecinos para convertirse en prácticamente parte de mi familia.
En fin este trabajo va dedicado a todas aquellas personas que de una u otra forma han contribuido para la consecución de esta meta.
iv
DEDICATORIA
Este trabajo está dedicado a mi madre que se ha sacrificado siempre para darme la oportunidad de llegar hasta aquí, mi padre y mi hermano que siempre me han apoyado.
v
AGRADECIMIENTO
En primer lugar dar gracias a Dios por darme la vida y la salud necesaria para conseguir todas las metas que me he planteado.
Agradecer a mi familia por estar siempre en los momentos en que los necesité y ser una fuente de inspiración para seguir adelante.
Agradecer a todos los amigos y compañeros con los que compartí esta etapa de mi vida, como lo fue ser estudiante de la Universidad de Oriente, y quienes siempre me ayudaron para lograr mis objetivos.
A todos los profesores que con su guía y conocimiento me permitieron aprender cada día más, tanto a nivel académico como a nivel personal, en especial a los profesores del área de grado. Judith Devia, Jesús Chaparro y Édgar Goncalves.
A mis compañeros en el área de grado que cruzaron conmigo esta última etapa de nuestra carrera universitaria, en especial a mi compañero de equipo Carlos Martínez.
vi
AGRADECIMIENTO
Agradecer a Dios por la vida que me ha dado.
A mi familia por acompañarme, enseñarme los valores que me han hecho la persona que soy hoy
A mis amigos y compañeros, sobre todo aquellos que han estado conmigo desde siempre, en buenos y malos momentos
A los profesores que han inspirado con sus enseñanzas y a mis compañeros de área de grado con los cuales compartimos todo este proceso, en especial mi compañero Juan González.
vii ÍNDICE
ACTA DE APROBACIÓN ... ii
DEDICATORIA ... iii
AGRADECIMIENTO ... v
ÍNDICE ... vii
ÍNDICE DE TABLAS ... xi
INDICE DE FIGURAS ... xii
ÍNDICE DE DIAGRAMAS ... xiv
RESUMEN ... xv
INTRODUCCIÓN ... 1
ETAPA I ... 5
EL PROBLEMA Y SUS GENERALIDADES ... 5
1.1 Planteamiento y delimitación del problema ... 5
1.2 Objetivos ... 9
1.2.1 Objetivo General ... 9
1.2.2 Objetivos específicos ... 9
1.3 Justificación e Importancia de la investigación ... 10
1.4 Alcance de la investigación ... 11
1.5 Limitaciones de la investigación ... 11
ETAPA II ... 13
ASPECTOS TEORICOS ... 13
2.1. Breve descripción de la unidad de estudio ... 13
2.2. Antecedentes de la Investigación ... 14
viii
2.3.1 Robótica ... 15
2.3.2 Microcontroladores ... 22
2.3.3 Sensores para robótica móvil ... 23
2.3.4 Motores de corriente continúa ... 24
2.3.5 Casas de cultivo ... 26
2.3.6 Cultivo del Tomate ... 27
2.3.7 Fumigación en cultivos ... 37
2.3.8 Lenguaje de Modelado Unificado (UML) ... 38
2.4. Bases legales ... 39
2.5. Definición de términos ... 41
ETAPA III ... 44
ASPECTOS METODOLÓGICOS ... 44
3.1 Tipo de investigación ... 44
3.2 Nivel de investigación ... 44
3.3 Diseño de investigación ... 45
3.4 Población y muestra ... 46
3.5 Técnica e instrumentos de recolección de datos ... 46
3.6 Técnica de análisis de datos ... 47
3.7 Diseño operativo ... 48
ETAPA IV ... 50
RESULTADOS ... 50
4.1 Fase I: Visualizar ... 50
4.1.1 Análisis del proceso productivo ... 50
ix
4.1.3 Elaboración del plan preliminar ... 54
4.2 Fase II: Conceptualizar ... 55
4.2.1 Modelo del proceso productivo actual ... 55
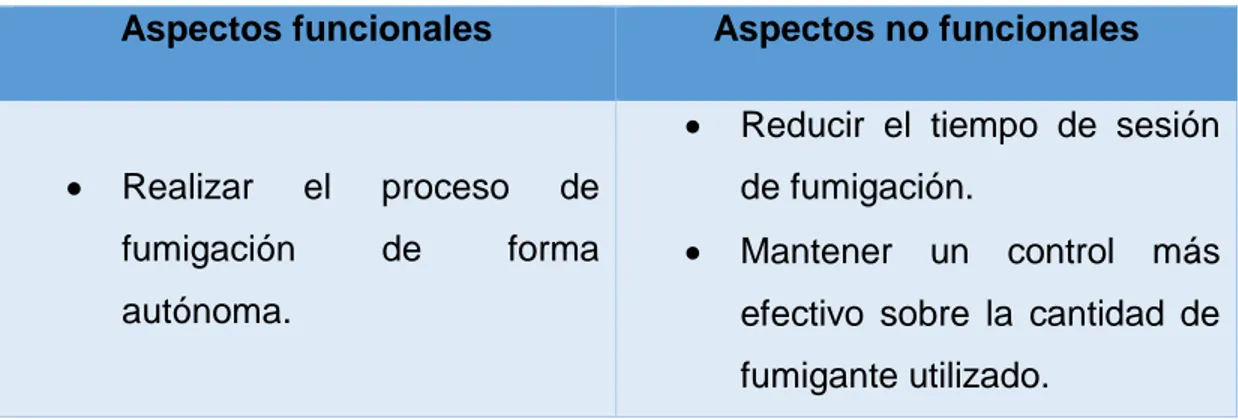
4.2.2 Determinar aspectos funcionales y no funcionales ... 61
4.2.4 Elaborar la posible solución ... 62
4.3 Fase III: Definir ... 63
4.3.1 Especificaciones del modelo ... 63
4.3.2 Evaluación y selección de componentes ... 77
4.3.3 Lógica de control ... 88
4.3.4 Lógica de Operación... 94
4.3.4 Arquitectura de control ... 98
4.3.5 Modelo propuesto ... 99
4.3.6 Plan de pruebas ... 104
Etapa V ... 109
SOLUCIÓN PROPUESTA ... 109
5.1 Análisis de la situación actual ... 109
5.2 Fundamentos técnicos de la propuesta ... 110
5.3 Fundamentos estratégicos de la propuesta ... 111
5.4 Descripción General del Modelo/Diseño ... 112
5.5 Aspectos estructurales a considerar en el Modelo/Diseño ... 114
5.6 Requerimientos tecnológicos utilizados para el Diseño ... 115
5.8 Beneficios de implementación del Modelo/Diseño ... 120
5.9 Estrategia de implementación del Modelo/Diseño ... 120
x
xi
ÍNDICE DE TABLAS
Tabla No 1 Fases y Actividades para el desarrollo de la investigación ... 49
Tabla No 2 Requerimientos preliminares ... 54
Tabla No 3. Aspectos funcionales y no funcionales del proceso ... 61
Tabla No 4. Matriz de Ponderación en su forma más general ... 78
Tabla No 5. Selección de microcontrolador ... 79
Tabla No 6. Selección de sensor ... 81
Tabla No 7. Selección de motor ... 82
Tabla No 8. Selección de batería ... 86
Tabla N°9. Control de posición y dirección de los motores ... 90
Tabla N°10. Costos de los componentes del robot móvil ... 116
Tabla N° 11. Costo total del robot móvil ... 118
Tabla N° 12. Costos y tiempo anuales de fumigación hombres vs maquina ... 119
xii
INDICE DE FIGURAS
Figura 1. Robot de labores domésticas ... 16
Figura 2. Robot móvil para labores de rescate ... 19
Figura 3. Robot agrícola para labores de fertilización ... 22
Figura 4. Motor de corriente continua ... 25
Figura 5. Casa de cultivo ... 27
Figura 6. Pulgón en planta de tomate ... 30
Figura 7. Mosca Blanca en planta de tomate ... 31
Figura 8. Alternariosis en el tomate ... 33
Figura 9. Mancha negra del tomate ... 35
Figura 10. Fungicida para control de malezas ... 37
Figura 11. Casa de cultivo de tomate de la Base “Indio Maturín” ... 52
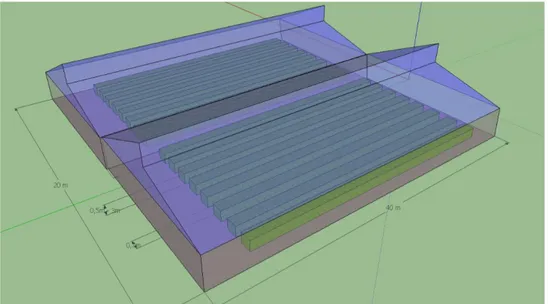
Figura 12. Representación de las medidas de la casa de cultivo ... 53
Figura 13. Vista de los pasillos e hileras de plantas de tomate ... 53
Figura 14. Aspersores manuales utilizados para la fumigación ... 61
Figura 15. Subsistemas que componen a un robot móvil ... 63
Figura 16. Microcontrolador PIC ... 64
Figura 17. Motor DC ... 67
Figura 18. Moto-Reductor ... 67
Figura 19. Servomotor ... 67
Figura 20. Motor paso a paso ... 68
Figura 21. Esquema de funcionamiento de bomba ... 69
Figura 22. Bomba centrifuga ... 69
Figura 23. Electroválvula ... 70
Figura 24. Robot con ruedas ... 72
Figura 25. Robot oruga ... 73
Figura 26. Chasis y locomoción oruga ensambladas ... 74
Figura 27. Recipiente fumigante ... 75
xiii
Figura 29. Boquilla ESS MaxCharge ... 76
Figura 30. PIC16f877A ... 80
Figura 31. Conexiones Microcontrolador PIC16f877A ... 80
Figura 32. Sensor QRD1114 ... 81
Figura 33. Motor Paso a paso... 83
Figura 34. Secuencia de movimiento en motor paso a paso ... 83
Figura 35. Bomba centrífuga sumergible ... 85
Figura 36. Electroválvula direccional 2/2 ... 86
Figura 37. Batería de Plomo-Acido. ... 87
Figura 38. Camino marcado por la línea negra a seguir por el robot móvil en la casa de cultivo. ... 89
Figura 39. Posición de los sensores frente a la línea negra ... 90
Figura 40. Configuración inicial... 94
Figura 41. Cont. Configuración inicial ... 95
Figura 42. Proceso de fumigación en el lado izquierdo ... 96
Figura 43. Proceso de movilidad de los motores ... 97
Figura 44. Panel de prueba de los diagramas en Flowcode ... 97
Figura 45. Arquitectura de control del robot móvil ... 98
Figura 46. Simulación 3D del microcontrolador conectado a la placa. ... 105
Figura 47. Sensores QRD1114. Sensor izquierdo apagado ... 106
Figura 48. Motor derecho gira en reversa, motor izquierdo hacia adelante ... 106
Figura 49. Sensores QRD1114 para detección de plantas. ... 107
Figura 50. Simulación de fumigación. ... 107
Figura 51. Microcontrolador PIC16f877A simulado. ... 108
Figura 52. Todos los componentes conectados. ... 108
Figura 53. Diseño físico 3D del robot móvil ... 113
xiv
ÍNDICE DE DIAGRAMAS
Diagrama 1. Casos de uso de la casa de cultivo ... 56
Diagrama 2. Caso de uso Fumigación ... 58
Diagrama 3. Flujo de actividades proceso de fumigación actual ... 60
Diagrama 4. Diagrama de flujo para la movilidad del robot móvil ... 91
Diagrama 5. Diagrama de flujo para la aspersion ... 93
Diagrama 6. Casos de uso del sistema propuesto ... 99
Diagrama 7. Flujo de actividades del caso de uso de Movimiento ... 101
xv
UNIVERSIDAD DE ORIENTE NÚCLEO DE MONAGAS
DEPARTAMENTO DE INGENIERÍA DE SISTEMAS SUB-COMISIÓN DE TRABAJO DE GRADO
CURSO ESPECIAL DE GRADO
AUTOMATIZACIÓN Y CONTROL DE PROCESOS INDUSTRIALES MATURÍN / MONAGAS / VENEZUELA
DISEÑO DE ROBOT MÓVIL PARA LABORES DE FUMIGACIÓN DE PLANTAS DE TOMATE EN AMBIENTE DE CASAS DE CULTIVO
TUTORA ACADÉMICA: Profa. Judith Devia
REALIZADO POR:
Br. González Q. Juan M. Br. Martínez G. Carlos D. RESUMEN
El presente proyecto de investigación tiene como finalidad realizar el diseño de un robot móvil para labores de fumigación de plantas de tomate bajo ambiente de casas de cultivo, con el objetivo de optimizar y aplicar los beneficios de la automatización de procesos en la ejecución de esta tarea. Esta investigación se realizó debido al auge que ha tomado la implementación de casas de cultivo en nuestro país en los últimos años para la siembra y producción de hortalizas y frutos como el tomate, y a las ventajas que representa la utilización de mecanismos automatizados para el control de plagas y malezas en plantaciones de este tipo, evitando el contacto de los operarios humanos con agentes químicos que resultan nocivos para la salud de los mismos. Para la realización del proyecto se utilizó la Metodología Para el Desarrollo de Sistemas de Supervisión y Control de Procesos Industriales, la cual presenta una serie de fases y actividades establecidas y necesarias para realizar el diseño del sistema automatizado. Durante la primera fase se analizó la situación actual del proceso de fumigación de casas de cultivo de tomates para sentar las bases del sistema a diseñar, luego se modeló la realización del proceso actual y se establecieron los requerimientos del sistema propuesto y por último se evaluaron y escogieron las tecnologías necesarias para la realización del diseño del robot y se simularon las conexiones de los componentes del sistema para corroborar el correcto funcionamiento del mismo.
INTRODUCCIÓN
El desarrollo de las tecnologías en los años recientes ha tenido un impacto destacado en la realización de los procesos productivos en una gran cantidad de áreas, y la implementación de dichos avances para optimizar la ejecución de actividades peligrosas o difíciles ha permitido mejorar la calidad de vida de las personas y sustituir la utilización de métodos rudimentarios cuya aplicación resultaba tediosa y en algunos casos peligrosa para la salud de los operarios. La aplicación de los avances tecnológicos tiene influencia igualmente en el crecimiento financiero de las organizaciones ya que la implementación de sistemas tecnológicos permite la disminución de los costos y tiempos de producción, traduciéndose esto en mayor rentabilidad económica para las empresas.
Una de las ramas de la ciencia que ha permitido el desarrollo de sistemas tecnológicos automatizados para la ejecución de tareas y trabajos de índole variada ha sido la robótica, la cual ha propiciado la aparición de mecanismos autómatas capaces de realizar acciones con una precisión y efectividad superior en comparación a si fueran llevadas a cabo por un ser humano. Son muchas las áreas donde se han implementado robots, comenzando con la rama industrial, la construcción, la medicina, la seguridad, la inspección de zonas de difícil acceso e incluso para el entretenimiento. El principal objetivo de la aplicación de robots en estos sectores siempre es el de optimizar la ejecución de las tareas y mejorar el desarrollo del proceso productivo, además de la evidente mejora en la calidad de los productos obtenidos.
2
propiciado el surgimiento de la denominada Robótica Agrícola, la cual puede definirse como las técnicas de automatización aplicadas a resolver problemas en ramas como la agricultura, silvicultura o pesca (Valverde 2009). Los robots agricultores tienen como finalidad la ejecución de trabajos relacionados al sector de la agricultura y que han permitido hacer frente a problemas como la falta de mano de obra capacitada o el manejo de sustancias que resultan nocivas para la salud de los seres humanos. Estos mecanismos robóticos son capaces de sustituir a operarios humanos en la ejecución de los procesos que van desde la preparación de los suelos, la siembra, el cuidado de los cultivos y la recolección.
Dentro del cuidado de los cultivos se encuentra ubicado el proceso de fumigación de las plantas, el cual es llevado a cabo con el propósito de prevenir la aparición de bacterias y malezas que puedan dañar tanto al tallo y hojas de la planta como al fruto que se obtiene de la misma. El proceso de fumigación es uno donde la automatización toma mayor relevancia dentro de la industria agrícola, ya que implica el uso de agentes químicos fumigantes que pueden tener efectos nocivos sobre la salud de un ser humano.
Dicho problema se ve incluso más grande en ambientes de casas de cultivo o invernaderos, ya que al tratarse de áreas cerradas, los agentes químicos se concentran aún más y la dispersión de los mismos es menor en comparación con ambientes al aire libre. Las casas de cultivo están siendo implementadas con mayor frecuencia en los últimos tiempos, sobre todo para la producción de hortalizas como el tomate, el pimentón o el ají, debido a los beneficios que estas presentan respecto al cultivo al aire libre, como el control de las variables de temperatura, humedad y el clima.
3
tomate bajo ambiente de casas de cultivo, con el fin de optimizar la ejecución de esta actividad y evitar que los trabajadores de las granjas estén expuestos de manera exagerada a las soluciones químicas utilizados para el cumplimiento de esta tarea.
Para el cumplimiento del objetivo principal de este proyecto se siguió la Metodología Para el Desarrollo de Sistemas de Supervisión y Control de Procesos Industriales, la cual originalmente consta de cuatro fases que son Visualizar, Conceptualizar, Definir e Implantar, pero para los efectos de esta investigación se adaptaron únicamente las tres primeras fases, dejándose de lado la última fase que implica la implementación del sistema diseñado.
Durante la primera fase de la metodología, Visualizar, se analizó profundamente la situación actual de las plantaciones de tomate en ambientes de casas de cultivo, haciendo especial énfasis en el proceso de fumigación. Para esto se llevó a cabo un proceso de investigación y búsqueda de información directamente desde una fuente primaria, de modo que los datos recabados ayudaran a sentar las bases del proyecto.
En la segunda fase de Conceptualizar, se realizó el modelado del proceso actual de fumigación de las casas de cultivo haciendo uso de las herramientas del Lenguaje de Modelado Unificado (UML) en base a los datos recabados durante la primera fase, así como el establecimiento de los requerimientos del sistema propuesto y el planteamiento de una posible solución a la problemática planteada.
4
5 ETAPA I
EL PROBLEMA Y SUS GENERALIDADES
1.1 Planteamiento y delimitación del problema
La automatización de los procesos de producción surge por la necesidad de mejorar la eficiencia en la ejecución de las actividades realizadas en los ambientes industriales, así como la optimización en la calidad de los productos obtenidos, de modo que se satisfagan las necesidades de los consumidores de manera rápida y eficiente y se cumplan con los estándares de calidad que requiere el mercado.
Los cambios y avances tecnológicos ocurridos en los últimos tiempos han propiciado el desarrollo de mecanismos y sistemas de acción, gestión, recolección de datos, supervisión y monitorización que se han implementado en todas las ramas de las ciencias aplicadas y han permitido la resolución de una gran cantidad de problemas, así como la ejecución de actividades que, de no existir dichos mecanismos, serían muy difíciles de llevar a cabo para los seres humanos. De acuerdo a García, E. () “El concepto de automatización lleva implícita la supresión total o parcial de la intervención humana en la
ejecución de diversas tareas, industriales, agrícolas, domésticas, administrativas o científicas.” (Pág. 9). La aplicación de dispositivos autómatas
en la ejecución de tareas riesgosas o tediosas para las personas, ha permitido optimizar el desarrollo de los procesos productivos, reduciendo los tiempos operacionales, mejorando la calidad de los productos y maximizando los beneficios económicos de las empresas.
6
Todos estos beneficios son los que han provocado que las empresas de las ramas industriales existentes apliquen los avances tecnológicos con el fin de automatizar sus actividades y mejorar la calidad de sus servicios. La agronomía es una de las áreas en la que la aplicación de sistemas automatizados ha propiciado un mejoramiento considerable en la eficiencia con que se llevan a cabo las tareas, en comparación con épocas antiguas en la que los procesos agrícolas dependían en su totalidad de la capacidad y la presencia de las personas, por lo que cualquier problema que afectara a los operarios humanos incidía directamente en el desarrollo del proceso productivo.
En el ámbito mundial la automatización de los procesos de producción del área agronómica ha experimentado grandes cambios que han ido de la mano con los avances tecnológicos, permitiendo la implementación de máquinas y robots para la ejecución de tareas relacionadas con el tratamiento de las especies vegetales. De acuerdo a Piñeiro, M. “En un contexto a largo plazo, la modernización de la agricultura es un pre-requisito para su crecimiento y para su contribución al desarrollo económico en general.” (Pág.
11) Cada día son más numerosos los sistemas desarrollados para realizar actividades tales como el riego, la siembra, la recolección, la poda, la fertilización o la fumigación de plantaciones.
7
En Venezuela la aplicación de la robótica para la realización de actividades referentes a la industria agronómica, y específicamente para funciones de fumigación de plantas, no ha tenido el auge que podría esperarse y no ha sido desarrollado ningún tipo de mecanismo autómata que ayude en la ejecución de los procesos de producción de dicha área, teniendo como consecuencia que todas las actividades se realicen de manera manual y dependan directamente de la capacidad de la mano de obra humana existente en el mercado.
La producción agrícola en Venezuela actualmente no es la mejor, viéndose afectada por la crisis económica general que afecta al país, por lo que es importante que los habitantes utilicen los conocimientos y recursos que posean con el fin de innovar y diseñar sistemas que presenten soluciones a los problemas existentes y optimizar las actividades de la industria, obteniendo mejores beneficios que ayuden al desarrollo productivo del país.
La producción agrícola vegetal no escapa de la crisis y de los problemas que actualmente vive el país. Muchos de los productos vegetales que son consumidos son importados de otros países ya que la producción interna no da abasto para satisfacer las demandas de la población, lo que trae consecuencias terribles en el sistema económico nacional. Entre estos, la producción del tomate se ve afectada igualmente por la crisis, y problemas como la inflación, la falta de mano de obra, la ausencia de tecnología moderna y adecuada para la producción, entre otros, ha hecho mella en la comercialización de este fruto.
8
desarrollo lento, en comparación con el crecimiento violento de las malezas, por lo que estas últimas compiten ventajosamente con dichos cultivos por agua, luz, y nutrimentos.
En Venezuela las zonas de mayor producción de tomate se localizan en los estados Aragua, Carabobo, Guárico, Lara, Monagas, Portuguesa y Zulia. El tomate es considerado la hortaliza más importante, tanto en consumo como en producción en el país, y su comercialización tiene una gran importancia para la economía de los estados involucrados en las actividades de cultivo y procesamiento de dicho fruto. Los tipos de tomate que con mayor frecuencia se cultivan en el país son el llamado tomate perita, el tomate redondo-manzano y el tomate industrial, de los cuales los dos primeros se cultivan generalmente para consumo directo y el último para la fabricación de productos derivados del tomate.
Es por todo esto que surge la necesidad de diseñar nuevas técnicas que ayuden a mejorar la situación en que se encuentra la producción del tomate en Venezuela, y de la que parte la presente investigación para la optimización de una de las actividades implicadas en el cultivo de dicho fruto, como lo es la fumigación de la planta de tomate. En la actualidad la implementación de casas de cultivo de productos vegetales está siendo muy utilizada debido a las ventajas que este tipo de ambiente presentan con respecto al cultivo a campo abierto, tales como mantener un control en factores como la temperatura, la humedad o el clima; control que es llevado a cabo a través de técnicas de cultivo tradicionales en este tipo de ambiente, tales como reflexión de la luz solar mediante uso de lonas,
9
que la cantidad y calidad del trabajo realizado por el agricultor incide directamente en la calidad del producto obtenido. Es debido a esto que surge la necesidad de diseñar dispositivos automatizados que faciliten las tareas de las personas y permitan una ejecución óptima y uniforme de las actividades de cuidado de los cultivos.
1.2 Objetivos
1.2.1 Objetivo General
Diseñar un robot móvil para labores de fumigación de plantas de tomate en ambiente de casas de cultivo para la disminución del contacto de los trabajadores con los agentes químicos fumigantes.
1.2.2 Objetivos específicos
Describir la situación actual en la ejecución del proceso de
fumigación de plantas de tomate en ambiente de casas de cultivo. Especificar los requerimientos del sistema de fumigación automatizado para el cultivo de plantas de tomate en casas de cultivo.
10
1.3 Justificación e Importancia de la investigación
La automatización de los procesos productivos tiene como prioridad la mejora, tanto en la calidad del trabajo realizado y del producto obtenido, así como en la seguridad de los operarios que intervienen en las actividades de producción. La fumigación es uno de los procesos más importantes y a la vez más riesgosos en las tareas de producción del área agrícola vegetal, ya que mediante éste se mantiene un control efectivo sobre las plagas y malezas que pueden afectar la calidad del producto sembrado, pero a la vez implica el riesgo del contacto que deben tener los encargados de llevar a cabo esta labor, con productos químicos que pueden causar daños y enfermedades a los mismos.
El presente proyecto está dirigido a la optimización de las tareas de fumigación de las plantaciones de tomate en casas de cultivo, debido a la importancia que tiene este fruto dentro de la producción agrícola vegetal del país, y específicamente del estado Monagas, teniendo presencia gran cantidad de granjas de cultivo de este fruto en la entidad, tanto en modalidades de campo abierto como en casas de cultivo.
11 1.4 Alcance de la investigación
El presente proyecto de investigación tiene como punto de partida la necesidad de optimizar la ejecución de una actividad en el área agronómica a través de la innovación y con el propósito de diseñar un sistema automatizado que se adapte a los requerimientos de la situación existente. El diseño de sistemas automatizados tiene el objetivo de optimizar el proceso productivo con el fin de mejorar la calidad del trabajo realizado y del producto obtenido, así como facilitar la ejecución de las tareas llevadas a cabo por los trabajadores de la industria.
El alcance del presente proyecto es el diseño de un robot móvil que sea capaz de llevar a cabo las actividades de fumigación de casas de cultivo para plantaciones de tomate. Para lograr dicho objetivo se realizan las actividades necesarias planteadas por la metodología operativa establecida para la realización de este proyecto. El diseño del sistema abarca la evaluación y selección de los componentes y la realización de simulaciones para probar el funcionamiento del robot. No está dentro del alcance de esta investigación la construcción del modelo físico del sistema, ni su posible expansión o adaptación a otro tipo de cultivo o de ambientes de producción diferentes al tomate y a casas de cultivo, respectivamente.
1.5 Limitaciones de la investigación
12
ambiente de casas de cultivo es nula, por lo que existe poco material local al que los investigadores pudieron acudir directamente a buscar información, viéndose en la necesidad de recurrir en mayor medida a documentos y páginas en línea referentes a proyectos llevados a cabo en otros países.
Otro de los factores es la localización de la granja de cultivo en donde se encuentran las plantaciones de tomate y a donde los investigadores debieron trasladarse para recoger datos directamente desde la fuente, ya que estos se encuentran relativamente alejados del casco central de la ciudad de Maturín, específicamente en el sector “Las Cayenas”, lo cual dificulta el acceso a los mismos. Además de esto la disponibilidad de los trabajadores de la granja no siempre estuvo garantizada, ya que las actividades de recolección de información por parte de los investigadores en ocasiones perturbaban la ejecución de las funciones referentes al cuidado de la granja.
13 ETAPA II
ASPECTOS TEORICOS
2.1. Breve descripción de la unidad de estudio
La Base Agro-productiva Socialista Indio Maturín es una empresa de producción social fundada en junio del 2012 como parte del Proyecto de Desarrollo y Consolidación de la Agricultura Urbana y Periurbana en el estado Monagas de la Fundación de Capacitación e Innovación para Apoyar la Revolución Agraria (CIARA), la base se encuentra ubicada en el sector de las Cayenas, municipio Maturín. La intención es producir alimentos sanos para venderlos a bajos precios.
Actualmente, la agrobase tiene un área total de 10.250 m2; y está equipada con un vivero ornamental de sombra de 150 m2 y uno medicinal de 80 m2; 2 casas de cultivo para la producción de pimentón, cebolla y tomate; 10 composteros para producir 44 m3 de abono orgánico; un lumbricario que produce 9 m3 de humus solidos (tierra fermentada o procesada) y 9000 litros de humus líquido; 44 canteros (circulares y lineales); y una casa de plántulas que cuenta con 64 mesas organopónicas. Además posee un gallinero de 30
14 2.2. Antecedentes de la Investigación
LEÓN, I. y VÁSQUEZ, A. (2013). Diseño e implementación de un Robot Móvil Autónomo y Tele-operado para labores agrícolas. Fase 1:
fumigación para plantaciones de rosas. Tesis desarrollada en la Escuela Politécnica del Ejército, Sangolquí, Ecuador, para la obtención del título en Ingeniería Electrónica, Automatización y Control.
Este proyecto abarca el diseño y construcción de un robot prototipo autónomo y tele-operado con el fin de realizar la fumigación de plantaciones de rosas. Se realizó una investigación técnica-bibliográfica para estructurar el marco teórico científico que fundamente al proyecto y un estudio de campo para determinar las condiciones óptimas para la implementación del robot. Una vez diseñado e implementado, se realizaron pruebas sobre un campo en condiciones ideales que simula una plantación de rosas, evidenciando el grado de efectividad que tiene la plataforma. Esta investigación ayudó a la identificación de los diferentes módulos que componen el funcionamiento de un robot móvil.
TOVAR, C. (2014). Desarrollo e implementación de una plataforma móvil para recolección de naranjas. Trabajo de grado para optar al título de ingeniero electrónico y telecomunicaciones, realizado en la Universidad Católica de Colombia, facultad de ingeniería, programa de ingeniería electrónica, Bogotá, Colombia.
15
reducir el desgaste físico. El aporte de esta investigación estuvo representado por el análisis del funcionamiento de la movilidad de un robot con configuración de ruedas de oruga.
ABREU, E. y MÁRQUEZ F. (2014). Propuesta metodológica para el desarrollo de sistemas de supervisión y control de procesos industriales.
Trabajo de grado en modalidad Curso Especial de Grado, para optar al título de Ingeniero de Sistemas, realizado en la Universidad de Oriente, Núcleo Monagas, en la ciudad de Maturín, Venezuela.
En este trabajo los investigadores llevaron a cabo una investigación de tipo documental para desarrollar una metodología que pudiera ser adaptada a los trabajos de diseño y desarrollo de sistemas en el área de automatización de procesos industriales. El aporte de este trabajo para la presente investigación fue la adaptación de la metodología desarrollada y sus actividades para llevar a cabo este proyecto.
2.3. Bases teóricas
2.3.1 Robótica
Robótica es la ciencia relacionada con la inteligencia artificial y la ingeniería mecánica. Esta expresión fue acuñada en 1942 por el bioquímico, escritor y divulgador científico norteamericano de origen ruso Isaac Asimov en su novela corta Runaround.
16
mecánica y la ingeniería. Su objetivo principal es la construcción de aparatos o artefactos que funcionen de manera automática y que puedan llevar a cabo
trabajos difíciles o imposibles para los seres humanos. La figura número 1 muestra un robot creado para la realización de labores domésticas.
Estas máquinas o agentes automáticos son llamados “robots”. El término robot se da a conocer en el año 1921 en el teatro nacional de Praga en la obra Rossum’s Universal Robot (R.U.R), basada en la novela corta “Opilec” escrita por Karel Capek en 1917, usada para denominar a unas máquinas construidas por el hombre y dotadas de inteligencia. La Asociación Francesa de Normalización (AFNOR), define a un robot como:
Manipulador automático servo-controlado, reprogramable, polivalente, capaz de posicionar y orientar piezas, útiles o dispositivos especiales, siguiendo trayectoria variables reprogramables, para la ejecución de tareas variadas. Normalmente tiene la forma de uno o varios brazos terminados en una muñeca. Su unidad de control incluye un dispositivo de memoria y ocasionalmente de percepción del entorno. Normalmente su uso es el de realizar una tarea de manera cíclica, pudiéndose adaptar a otra sin cambios permanentes en su material.
17
2.3.1.1 Clasificación de los robots según su arquitectura
Los dispositivos y mecanismos que pueden agruparse bajo el concepto de Robots son muy diversos y, por lo tanto, es difícil establecer una clasificación coherente de los mismos que resista un análisis crítico y riguroso. La subdivisión de los Robots de acuerdo a su arquitectura se organiza así:
1. Poliarticulados: Bajo este grupo están los robots de muy diversa forma y configuración, cuya característica común es la de ser básicamente sedentarios y estar estructurados para mover sus elementos terminales en un determinado espacio de trabajo según uno o más sistemas de coordenadas y con un número limitado de grados de libertad. Entre estos encontramos a los robots empleados en las industrias.
2. Móviles: Son robots con diversas capacidades de desplazamiento que se basan principalmente en carros o plataformas y se caracterizan por poseer un sistema locomotor de tipo rodante. Su movimiento es guiado por un comando o por la acción de sus sensores. Pueden incluso llegar a sortear obstáculos y están dotados de un nivel relativamente elevado de inteligencia.
3. Androides: Son Robots que intentan imitar total o parcialmente la forma y el comportamiento del ser humano. Actualmente los androides están todavía muy poco evolucionados y sin utilidad práctica, y destinados, fundamentalmente, al estudio y experimentación. Uno de los aspectos más complicados de estos Robots, es el de la locomoción bípeda. Lo más importante es controlar la dinámica y coordinar el tiempo real en el proceso y mantener simultáneamente el equilibrio del Robot.
18
caminadores y no caminadores. Las aplicaciones de estos Robots serán interesantes en el campo de la exploración espacial y en el estudio de los volcanes.
5. Híbridos: Son aquellos de difícil clasificación cuya estructura se sitúa en combinación con alguna de las características anteriormente ya expuestas. Por ejemplo, un dispositivo segmentado articulado y con ruedas, es al mismo tiempo uno de los atributos de los Robots móviles y de los Robots zoomórficos. De igual forma pueden considerarse híbridos algunos Robots formados por la yuxtaposición de un cuerpo formado por un carro móvil y de un brazo semejante al de los Robots industriales.
2.3.1.2 Robótica Móvil
Baturone (2005) sostiene que:
El desarrollo de robots móviles responde a la necesidad a extender el campo de aplicación de la Robótica, restringido inicialmente al alcance de una estructura mecánica anclada en uno de sus extremos. Se trata también de incrementar la autonomía limitando todo lo posible la intervención humana. (p. 8).
19
Aunque sus aplicaciones pueden ser variadas, normalmente están
enfocadas en tareas o procesos que pueden resultar dañinas o peligrosas para
los seres humanos, en áreas como la agricultura, en el transporte de cargas
peligrosas o en tareas de exploración solitarias o cooperativas junto a otros vehículos no tripulados. Ejemplos clásicos son el traslado y acopio de materiales, las tareas de mantenimiento en reactores nucleares, la manipulación de materiales explosivos, la exploración subterránea, etc.
Estos robots poseen una autonomía no en cuestiones energéticas, sino que también se refiere a la capacidad de percibir, modelar, planificar y actuar para alcanzar determinados objetivos, sin la intervención (o con una intervención muy pequeña) del operador humano ya que el robot se puede desenvolver en ambientes estructurados o no estructurados, total o parcialmente conocidos. El papel de este debe ser desempeñado por el propio sistema de control del vehículo, al que debe suplir con la inteligencia necesaria para mover al robot correctamente. La figura 2 muestra un robot móvil creado para labores de rescate.
Figura 2. Robot móvil para labores de rescate
20 2.3.1.3 Robótica Agrícola
La robótica agrícola es la tecnología de la automatización empleada en biosistemas como la agricultura, silvicultura, industrias pesqueras y otras afines. Esta rama de la robótica ha venido desarrollándose con fuerza en los últimos años, logrando resultados muy significativos en robots que desarrollan labores agrícolas directamente en el campo.
Su objetivo es sustituir las pesadas y costosas maquinarias, así como la de facilitar tareas agrícolas que son perjudiciales para el hombre como la siembra, fumigación, recolección y arado de la tierra, por robots ligeros y
baratos. Estos robots permitirán crear un nuevo modelo de actividad llamada
Granja del Futuro, el cual es un proyecto que se han puesto como meta los investigadores en esta área. Dicha granja será gestionada por un sistema informático que coordinara la actividad de los robots de campo con la ayuda de satélites, y a su vez tener conocimiento de la situación actual de los mercados a los que van dirigidos los productos de la granja.
El proyecto ha definido el desarrollo y producción de robots agrícolas dividiéndolos en tres generaciones que se convertirán a la vez en 3 fases de penetración de agrotecnología al mundo. Según Valverde (2009) estas generaciones se dividen de la siguiente manera:
21
intercambiar información con otras unidades y de detectar epidemias e insectos peligrosos, advirtiendo de ello a los demás robots desplegados sobre el terreno.
II. La Segunda Generación pretende llegar más lejos y acometer tareas agrícolas más complejas, como roturar mecánicamente un terreno y fumigarlo con la ayuda de GPS. Estos robots también serán de pequeño tamaño, excepto los que se dediquen a cosechar, los cuales deberán tener un tamaño equivalente al de las máquinas actuales
III. La Tercera Generación formará parte de un sistema más amplio para gestionar en su conjunto la Granja del Futuro, con actividades complementarias a las estrictamente agrícolas, como la ganadería y la gestión comercial.
22
Figura 3. Robot agrícola para labores de fertilización Fuente: http://www.technologyreview.es/read_article.aspx?id=46011
2.3.2 Microcontroladores
Los microcontroladores son circuitos integrados que están pensados principalmente para ser utilizados en aplicaciones puntuales, es decir, aplicaciones donde el microcontrolador debe llevar a cabo un pequeño número de tareas, al menor costo posible. “En estas aplicaciones, el microcontrolador ejecuta un programa almacenado permanentemente en su memoria, el cual trabaja con algunos datos almacenados temporalmente e interactúa con el exterior a través de las líneas de entrada y salida de que dispone” (Valdés, 2007, p.12).
23 2.3.2.1 Microcontroladores PIC
La arquitectura de los PIC está basada en la arquitectura Harvard, con memorias de programa y de datos separadas. Como en la mayoría de los microcontroladores, la memoria de programa es mucho mayor que la de datos. La memoria de programa está organizada en palabras de 12,14 ó 16 bits mientras que la memoria de datos está compuesta por registros de 8 bits. El acceso a los diversos dispositivos de entrada y salida se realiza a través de algunos registros de la memoria de datos, denominados registros de funciones especiales (SFR: Special Function Registers). Muchos microcontroladores PIC cuentan con una cierta cantidad de memoria EEPROM para el almacenamiento no volátil de datos.
Por otra parte, todos los PIC son microcontroladores RISC que cuentan con un pequeño número de instrucciones: entre 33 y 77. Todas las instrucciones son del mismo tamaño: una palabra de 12,14 ó 16 bits. Los microcontroladores PIC cuentan con una amplia gama de dispositivos de entrada y salida. Disponen de puertos paralelos de 8 bits, tempo-rizadores, puertos serie sincrónicos y asincrónicos, convertidores A/D de aproximaciones sucesivas de 8 y 10 bits, convertidores D/A, moduladores de ancho de pulso (PWM: Pulse Widtli Modulation), etc. Excepto en los PIC de gama baja, que no disponen de un sistema de interrupciones, los dispositivos de entrada y salida generan solicitudes de interrupción al microcontrolador, que se pueden enmascarar individualmente.
2.3.3 Sensores para robótica móvil
24
enfrentan, dónde están los objetos con los que deben interactuar, sus parámetros físicos, etc.
En la actualidad los sistemas de robótica móvil están dotados de un conjunto muy amplio de sensores, cuya función es la recolección de datos del entorno y sobre el estado del propio robot. La principal utilidad del sistema sensorial es la construcción de mapas de entorno con el fin de proporcionar la información necesaria para la navegación del robot en su ambiente de trabajo.
2.3.4 Motores de corriente continúa
Los motores de corriente continua tienen varias particularidades que los hacen muy diferentes a los de corriente alterna. Una de las particularidades principales es que pueden funcionar a la inversa, es decir, no solamente pueden ser usados para transformar la energía eléctrica en energía mecánica, sino que también pueden funcionar como generadores de energía eléctrica. Esto sucede porque tienen la misma constitución física, de este modo, tenemos que un motor eléctrico de corriente continua puede funcionar como un generador y como un motor.
25
Figura 4. Motor de corriente continua
Fuente: http://www.monografias.com/trabajos61/motores-corriente-continua/motores-corriente-continua.shtml
2.3.4.1 Componentes del motor CC
Los motores de corriente continua están formados principalmente por:
1. Carcasa metálica o cuerpo del motor: Aloja en su interior, de forma fija, dos imanes permanentes con forma de semicírculo, con sus correspondientes polos norte y sur.
2. Rotor o parte giratoria del motor: Se compone de una estructura metálica formada por un conjunto de chapas o láminas de acero al silicio, troqueladas con forma circular y montadas en un mismo eje con sus correspondientes bobinas de alambre de cobre, que lo convierten en un electroimán giratorio. Por norma general el rotor de la mayoría de los pequeños motores de C.D. se compone de tres enrollados o bobinas que crean tres polos magnéticos. Los extremos de cada una de esas bobinas se encuentran conectados a diferentes segmentos del colector. 3. Colector o conmutador: Situado en uno de los extremos del eje del rotor, se compone de un anillo deslizante seccionado en dos o más segmentos. Generalmente el colector de los pequeños motores comunes de C.D. se divide en tres segmentos.
26
escobillas constituyen contactos eléctricos que se deslizan por encima de los segmentos del colector mientras estos giran. Su misión es suministrar a la bobina o bobinas del rotor a través del colector, la corriente eléctrica directa necesaria para energizar el electroimán. En los pequeños motores las escobillas normalmente se componen de dos piezas o flejes metálicos que se encuentran fijos en la tapa que cierra la carcasa o cuerpo del motor.
5. Tapa de la carcasa: Es la tapa que se emplea para cerrar uno de los extremos del cuerpo o carcasa del motor. En su cara interna se encuentran situadas las escobillas de forma fija. El motor de esta foto utiliza en función de escobillas dos flejes metálicos.
2.3.5 Casas de cultivo
Las casas de cultivo son estructuras cubiertas, que ayudan a simular un ambiente controlado en países con climas tropicales, con el fin de proteger a las plantas de los efectos directos de las radiaciones del sol y las fuertes lluvias. En la producción protegida el efecto buscado es la “sombrilla” que disminuye la radiación global y un aumento de la aireación. Además incluye aspectos relacionados con prácticas conservacionistas de suelos y aguas, riego y drenaje, mecanización agrícola, tecnología de alimentos y agro meteorología.
Las casas de cultivo son una solución a los problemas en la producción de hortalizas, como son los altos costos de producción, los bajos rendimientos, la baja calidad sanitaria y agronómica causada por la alta incidencia de plagas y su inadecuado manejo así como el manejo inapropiado de suelos y aguas.
27
biocidas (plaguicidas, herbicidas, insecticidas, fungicidas, etc.) y el agotamiento y contaminación de las reservas hídricas subterráneas. La modificación del clima dentro de las casas de cultivo, lo hace más benigno para el desarrollo de patógenos, requiriendo su control el uso frecuente de insecticidas y fungicidas, que al volatilizarse están contaminando el aire, poniendo en riesgo directo a quienes los aplican cuando esto no se hace dentro de las normas de seguridad. La figura 5 muestra la vista externa de una casa de cultivo destinada a la producción de pimentón.
Figura 5. Casa de cultivo
Fuente: http://casasdecultivo1.blogspot.com/2010/08/los-cultivos-protegidos-en-venezuela.html
2.3.6 Cultivo del Tomate
28
peciolo, o bien puede separase por la zona peduncular de unión al fruto. La temperatura óptima de desarrollo oscila entre 20 y 30 º C durante el día y entre 1 y 17 ºC durante la noche; temperaturas superiores a los 30-35 ºC afectan a la fructificación, por mal desarrollo de óvulos y al desarrollo de la planta en general y del sistema radicular en particular. Temperaturas inferiores a 12-15 ºC también originan problemas en el desarrollo de la planta.
2.3.6.1 Orígenes
El origen del género Lycopersicon sculentum se localiza en la región andina que se extiende desde el sur de Colombia al norte de Chile, pero parece que fue en México donde se domesticó, quizá porque crecería como mala hierba entre los huertos. Durante el siglo XVI se consumían en México tomates de distintas formas y tamaños e incluso rojos y amarillos, pero por entonces ya habían sido traídos a España y servían como alimento en España e Italia.
En un principio los europeos tomaron en cuenta la planta como valor ornamental por sus frutos y no por su valor alimenticio, ya que se temían que los mismos fuesen venenosos, pero fue en Italia, donde descubrieron posteriormente el justo uso por su excelente palatabilidad y alto valor alimenticio.
2.3.6.2 Tipos de Tomate y su uso en Venezuela
a) Tomate perita grande para consumo directo: Se cosecha con la mínima madurez (Verde hecho - pintón) por lo que se requiere recolectarlo varias veces a la semana durante un periodo largo (aprox. 2 meses) el valor varía por el tamaño, la dureza, la madurez, el brillo y la forma. b) Tomate Industrial: Son también tomates tipo pera pero el tamaño no es
29
algunas diferenciaciones por forma y otras características que los hacen mejor para pelado, trocitos, Ketchup, jugos, etc.
c) Tomates redondos-manzanos para consumo directo: Es lo que más se
acostumbra en otras latitudes. Son frutos de mejor palatabilidad pero más sensibles al manejo y al transporte. Su mercado tiene muy poco desarrollo en el país, aunque paulatinamente se han ido incorporando áreas en “Casas de Cultivo” para mercados especiales y alguna presencia en las cadenas de supermercados. Su cultivo a campo abierto es técnica y económicamente posible en época seca y las zonas xerófitas en época de lluvias.
2.3.6.3 Aspectos fitosanitarios
A) Plagas del tomate
Son numerosos los insectos y algunos ácaros que se constituyen como plagas para el cultivo del tomate. Si no se realiza el debido control a nivel de semilleros y hasta la cosecha, los ataques tienden a concentrase en las yemas terminales, folíolos de las hojas y los frutos, mientras que el de los ácaros a nivel del follaje y fruto. Algunas de estas plagas son:
30
Figura 6. Pulgón en planta de tomate
Fuente: http://www.serida.org/publicacionesdetalle.php?id=4811
2. Araña roja (Tetranychus urticae): Es un ácaro que se puede ver con lupa o fijándose muy cerca con buena vista. Se desarrolla en el envés de las hojas causando decoloraciones o manchas amarillentas que pueden apreciarse en el haz como primeros síntomas. Con mayores poblaciones se produce desecación o incluso defoliación. El calor y la baja humedad relativa favorecen el desarrollo de esta plaga.
3. Vasate (Aculops lycopersici): Es otro tipo de ácaro mucho menos frecuente que la Araña roja que se da en el cultivo de invernaderos. Síntomas: bronceado o herrumbre primero en el tallo y posteriormente en las hojas e incluso frutos. Evoluciona de forma ascendente desde la parte basal de la planta. Aparece por focos. Le favorece el calor y la baja humedad ambiental. Control igual que Araña roja.
31
figura número 7 se observa la apariencia de una planta de tomate afectada por la mosca blanca.
Figura 7. Mosca Blanca en planta de tomate Fuente: http://www.ecoticias.com/alimentos/41584/
5. Trips (Frankliniella occidentalis): Los daños directos se producen por la alimentación de larvas y adultos, sobre todo en el envés de las hojas, dejando un aspecto plateado en los órganos afectados que luego se necrosan. El daño indirecto es el que acusa mayor importancia y se debe a la transmisión del Virus del bronceado del tomate (TSWV). Sacude alguna flor en la palma de la mano para ver si hay, se localizan mucho en flores. [Más datos y control]
6. Orugas de lepidópteros (Spodoptera exigua, Spodoptera litoralis, Heliothis armígera, Chrysodeisis chalcites, Autographa gamma (Plusia): Los daños son causados por las larvas al alimentarse de hojas y frutos. Los adultos son polillas nocturnas que no hacen nada.
32
8. Gusanos de suelo (Gusanos grises (Agrotis spp.), Gusanos blancos (Melolontha spp.), Gusanos de alambre (Agriotes spp), Moscas y mosquitos de la humedad (Sciara sp.)): Se alimentan de la zona del cuello y raíces de las plantas. Provocan corte de tallos en plántulas y plantas jóvenes y decaimiento. Distribución típica por rodales. Son frecuentes en turbas y sustratos a granel y en estiércol poco hecho. 9. Nematodos (Meloidogyne spp.): Penetran en las raíces desde el suelo
produciendo los típicos nódulos en las raíces que le dan el nombre común de "batatillas" o "porrillas". Estos daños producen la obstrucción de vasos e impiden la absorción por las raíces, traduciéndose en un menor desarrollo de la planta y la aparición de síntomas de marchitez en verde en las horas de más calor, clorosis y enanismo.
B) Enfermedades del tomate
La presencia de microorganismos dañinos al tomate, especialmente patógenos causantes de enfermedades, es una de las limitantes principales en la producción, donde destacan la presencia de microorganismos que viven en el suelo, induciendo daños en la raíz o a los tejidos conductores, de tal manera que interfieren de alguna forma en la translocación de agua y nutrientes. Así como algunas enfermedades de naturaleza fungosa (hongos), bacteriana y viral, que ocasionan daños importantes en el área foliar. Las principales enfermedades que afectan al cultivo de tomates son:
1. Oidio, Ceniza u Oidiopsis (Leveillula taurica): Manchas amarillas en el haz que se necrosan por el centro, observándose un polvillo blanquecino por el envés. En caso de fuerte ataque la hoja se seca y se desprende pudiendo llegar a provocar importantes defoliaciones. 2. Podredumbre gris o Botritis (Botrytis cinerea): En hojas y flores se
33
blanda (más o menos acuosa, según el tejido), en los que se observa el micelio gris del hongo.
3. Podredumbre blanca (Sclerotinia sclerotiorum): En planta produce una podredumbre blanda (no desprende mal olor) acuosa al principio que posteriormente se seca más o menos según la suculencia de los tejidos afectados, cubriéndose de un abundante micelio algodonoso blanco, observándose la presencia de numerosos esclerocios, blancos al principio y negros más tarde. Control y prevención igual que Botritis. 4. Mildiu (Phytophthora infestans): En hojas aparecen manchas
irregulares de aspecto aceitoso al principio que rápidamente se necrosan e invaden casi todo el foliolo. Alrededor de la zona afectada se observa un pequeño margen que en presencia de humedad y en el envés aparece un fieltro blancuzco poco patente. En tallo, aparecen manchas pardas que se van agrandando y que suelen circundarlo. 5. Alternariosis del tomate (Alternaria solani): En hoja se producen
manchas pequeñas circulares o angulares, con marcados anillos concéntricos. En tallo y peciolo se producen lesiones negras alargadas, en las que se pueden observar a veces anillos concéntricos. Los frutos son atacados a partir de las cicatrices del cáliz, provocando lesiones pardo-oscuras ligeramente deprimidas y recubiertas de numerosas esporas del hongo. En la figura 8 se observa el efecto de esta enfermedad en el tomate.
Figura 8. Alternariosis en el tomate
34
6. Fusarium (Fusarium oxysporum f.sp. lycopersici) Comienza con la caída de peciolos de hojas superiores. Las hojas inferiores amarillean avanzando hacia el ápice y mueren. También puede ocurrir que se produzca un amarilleo que comienza en las hojas más bajas y que termina por secar la planta. Si se realiza un corte transversal al tallo se observa un oscurecimiento de los vasos. El hongo puede permanecer en el suelo durante años y penetra a través de las raíces hasta el sistema vascular.
7. Verticilium (Verticilium dahliae): La penetración se realiza en el suelo, favorecida por heridas en las raíces. Disminución importante de los rendimientos y disminución del tamaño de los frutos, en ataques severos. Si las condiciones favorables a la enfermedad remiten, puede obtenerse una cosecha normal.
8. Caída de plántulas o Damping-off: En semilleros, los hongos de las raíces causan gran mortandad en plántulas recién germinadas. Es lo que se conoce por 'caída de plántulas' o 'damping-off'. A nivel del cuello quedan ennegrecidos y se doblan cayendo sobre el sustrato. Los causantes son Fusarium, Phytophthora y Rhizoctonia. La infección se expande con rapidez por todo el semillero.
9. Chancro bacteriano del tomate (Clavibacter michiganensis subsp. michiganensis): Puede afectar a plántulas que presentan síntomas de marchitez y muerte. En plantas adultas se marchitan las hojas inferiores. En tallo, en ocasiones se observan chancros oscuros, longitudinales y abiertos que pueden exudar un líquido amarillo al realizar un corte longitudinal al tallo. En fruto, aparecen manchas en forma de "ojo de pájaro" de 3 a 6 mm de diámetro, con el centro oscuro y halo amarillo.
35
sépalos también aparecen manchas negras de borde. Solo son atacados los frutos verdes en los que se observan pequeñas manchas (de 1 mm) deprimidas. El viento, lluvia, gotas de agua y riegos por aspersión diseminan la enfermedad. La figura 9 muestra el fruto afectado por la mancha negra.
Figura 9. Mancha negra del tomate
Fuente: http://www.infojardin.com/foro/showthread.php?t=44256
11. Roña o sarna bacteriana (Xanthomonas campestris p.v. vesicatoria): Provoca manchas negras en todas las partes aéreas de la planta igual que Ps. tomato pero en general, más grandes y regulares. El diagnóstico en campo se distingue de Ps tomato por el tamaño de las manchas y si es ataque avanzado en fruto, por los grandes chancros pustulosos característicos.
12. Podredumbres blandas (Erwinia carotovora subsp. carotovora): Penetra por heridas, provocando generalmente podredumbres acuosas, blandas que suelen desprender olor nauseabundo. En tomate se observa exteriormente en el tallo manchas negruzcas y húmedas. En general, la planta suele morir.
36
maduración irregular, deformaciones y necrosis. La transmisión se produce mediante varias especies de trips.
14. Virus del mosaico del pepino (CMV): Debido a la gran variabilidad genética, los síntomas producidos por diferentes cepas de virus pueden ser distintos. En tomate, las cepas comunes de CMV producen síntomas de mosaicos foliares en forma de manchas de color verde claro-verde oscuro. La transmisión se realiza por pulgones.
15. Virus del rizado amarillo del tomate (TYLV): En plantas pequeñas se produce parada del crecimiento; en planta desarrollada, los foliolos son de tamaño reducido. En los frutos no se observan síntomas, solo una reducción de tamaño.
16. Virus del mosaico del tomate: En las hojas de tomate se observa un mosaico verde claro-verde oscuro. Los frutos aparecen con deformaciones, manchas generalmente amarillas y a veces maduración irregular. La transmisión se realiza por semillas y mecánicamente por contacto de manos, herramientas, etc. No se conocen vectores específicos naturales.
17. Virus Y de la patata (PVY): En tomate se producen suaves mosaicos foliares en forma de manchas de color verde claro-verde oscuro; en ocasiones las plantas presentan manchas necróticas foliares visibles por el haz y por el envés que a veces se extiende a peciolos y tallos. Se transmite por varias especies de pulgones.
18. Virus del enanismo ramificado del tomate (TBSV): En las hojas apicales de tomate se observa un fuerte amarilleo a veces con necrosis que pueden llegar hasta el peciolo y tallo; otras veces las hojas aparecen de un fuerte color morado y en los frutos se observa fuertes necrosis con zonas hundidas, manchas y deformaciones. No se conocen vectores naturales. Se transmite por suelo y agua.
37
El estrés hídrico y la salinidad influyen también directamente en su aparición. Comienza por la zona de la cicatriz pistilar como una mancha circular necrótica que puede alcanzar hasta el diámetro de todo el fruto.
2.3.7 Fumigación en cultivos
Los plaguicidas utilizados para las fumigaciones de cultivos son:
1. Fungicidas: Son sustancias químicas que sirven para destruir o evitar el desarrollo de los hongos que causan enfermedades en las plantas y son altamente tóxicos. Se usan en la industria, agricultura, jardín y hogar, para protección de las semillas de grano durante su almacenamiento, transportación y germinación. Se aplican mediante rociado, pulverizados, por revestimientos o fumigación. El potencial que tienen para causar daños en humanos varía enormemente. Aunque se ha considerado que los fungicidas son menos dañinos que los insecticidas, sin embargo en muchos países están prohibidos algunos de ellos. La figura 10 muestra un fungicida comercial destinado al control de malezas en huertos y frutales.
Figura 10. Fungicida para control de malezas
38
2. Insecticidas: Es un compuesto químicos utilizado para matar insectos, mediante la inhibición de enzimas vitales. La mayoría de los insecticidas agrícolas tienen que ser rociados una cantidad de veces específica para ser más efectivos. O el clima o el momento estacional son conducentes a la emergencia de una peste de insectos o el cultivo es más vulnerable a pestes de insectos en una etapa específica de crecimiento. Por ejemplo, rociar girasoles para controlar polillas funciona mejor cuando las flores están polinizándose.
3. Herbicidas: Son compuestos diseñados para matar o lesionar a tipos específicos de plantas no deseadas (malezas) en un cultivo determinado. Su función es bastante selectiva, afectando principalmente al crecimiento o viabilidad de la planta. Hay distintos tipos: para hoja ancha; para hoja angosta; herbicidas totales (ejemplo: glifosato, mata todo lo que tenga clorofila); hormonal y de contacto. Algunos herbicidas deben ser aplicados antes de plantar el cultivo. En las primaveras húmedas, estos productos pueden aplicarse de manera oportuna por aire, aún si los campos son demasiado lodosos para ser cubiertos con rociadores con base en el suelo.
2.3.8 Lenguaje de Modelado Unificado (UML)
39 2.3.8.1 Diagrama de Casos de Uso
Un diagrama de casos de uso es una especie de diagrama de comportamiento UML mejorado. El Lenguaje de Modelado Unificado (UML), define una notación gráfica para representar casos de uso llamada modelo de casos de uso. UML no define estándares para que el formato escrito describa los casos de uso, y así mucha gente no entiende que esta notación gráfica define la naturaleza de un caso de uso; sin embargo una notación gráfica puede solo dar una vista general simple de un caso de uso o un conjunto de casos de uso. Los diagramas de casos de uso son a menudo confundidos con los casos de uso. Mientras los dos conceptos están relacionados, los casos de uso son mucho más detallados que los diagramas de casos de uso.
2.4. Bases legales
Constitución de la República Bolivariana de Venezuela (1999):
Artículo 110. El estado reconocerá el interés público de la ciencia, la tecnología, el conocimiento, la innovación y sus aplicaciones y los servicios de la información necesarios por ser instrumentos fundamentales para el desarrollo económico, social y político del país, así como para la seguridad y soberanía nacional (…) El Estado garantizará el cumplimiento de los principios éticos y legales que deben regir las actividades de investigación científica, humanística y tecnológica.
Comisión Venezolana de Normas Industriales (COVENIN)
40
en su apartado número 5 “Otras medidas de higiene ocupacional” establece lo siguiente:
5.1 En todo lugar donde se almacenen, manipulen o usen plaguicidas o sus materias primas, se debe adiestrar al personal sobre: características de dichas sustancias, riesgos de salud, medidas y sistemas de control, así como en el uso y mantenimiento de los equipos de protección personal, incluyendo el equipo de protección respiratoria.
5.2 Todo trabajador que manipule o utilice plaguicidas o sus materias primas, debe ser informado en forma verbal o por escrito del riesgo al cual está expuesto.
Ley sobre el Derecho de Autor
Transcrito de la Gaceta Oficial N° 4.638 Extraordinario del 1° de octubre de 1993, establece en su Título I “de los derechos protegidos”, Capítulo I “disposiciones generales”, Sección Primera “de las obras de ingenio” lo siguiente:
Artículo 1°
41
Los derechos reconocidos en esta Ley son independientes de la propiedad del objeto material en el cual esté incorporada la obra y no están sometidos al cumplimiento de ninguna formalidad.
Quedan también protegidos los derechos conexos a que se refiere el Título IV de esta Ley.
Artículo 2°
Se consideran comprendidas entre las obras del ingenio a que se refiere el artículo anterior, especialmente las siguientes: los libros, folletos y otros escritos literarios, artísticos y científicos, incluidos los programas de computación, así como su documentación técnica (…), en fin, toda producción literaria, científica o artística susceptible de ser divulgada o publicada por cualquier medio o procedimiento.
Artículo 3°
Son obras del ingenio distintas de la obra original, las traducciones, adaptaciones, transformaciones o arreglos de otras obras, así como también las antologías o compilaciones de obras diversas y las bases de datos, que por la selección o disposición de las materias constituyen creaciones personales.
2.5. Definición de términos
42
Aspersor: Dispositivo mecánico que en la mayoría de los casos transforma un flujo líquido presurizado y lo transforma en rocío, asperjándolo para fines de riego. (Fuente: http://lexicoon.org/es/aspersor).
Camas de cultivo: Las camas de cultivo son espacios, generalmente cuadrados o rectangulares delimitados por cercos de madera, PVC, hormigón, etc., rellenos de un sustrato adecuado donde se plantan generalmente especies vegetales de una misma familia para facilitar su crecimiento y cuidado. (Fuente: http://www.atperfiles.com/camas-elevadas- para-el-cultivo/).
Cultivo: Trabajo de la tierra y cuidado de sus plantas para que den fruto y produzcan un beneficio. (Fuente: http://es.thefreedictionary.com/cultivo).
Diagrama de flujo: Es una representación gráfica de un proceso. Cada paso del proceso es representado por un símbolo diferente que contiene una breve descripción de la etapa de proceso. (Fuente: http://www.aiteco.com/que-es-un-diagrama-de-flujo/).
Diseño: Proceso previo de configuración mental, "pre-figuración", en la búsqueda de una solución en cualquier campo. (Fuente: http://es.wikipedia.org/wiki/Dise%C3%B1o)