1.2. Curvas paramétricas.
Definición. Sean x x1, , ,2 xn funciones continuas de ℜ → ℜ para un intervalo
[ ]
a b, definidas como( )
( )
( )
1 1 , 2 2 , , n n
x = f t x = f t x = f t
con t∈
[ ]
a b, .El conjunto de puntos
(
x x1, , ,2 xn)
=(
f t f t1( ) ( )
, 2 , , f tn( )
)
define una curva C en nℜ y estas funciones representan las ecuaciones paramétricas de la curva para el parámetro t∈
[ ]
a b, , esto es( )
( )
( )
( )
1 1
2 2
: n/
n n
f t x
f t x
f f t
f t x
ℜ → ℜ = =
Figura 9. Curva Paramétrica
f(t)
a t b
Si la curva C está definida en ℜ3 por la función vectorial
( )
( )
( )
( )
3
1 ˆ 2 ˆ 3 ˆ
: /
f ℜ → ℜ f t = f t i + f t j+ f t k, donde f1, f2 y f3 son funciones escalares
en un intervalo
[ ]
a b, . Entonces el conjunto de todos los puntos(
x y z, ,)
en el espacio tales que x= f t1( )
, y= f t2( )
y z= f t3( )
donde los valores de t pertenecen al intervalo[ ]
a b, , se llama curva paramétrica en el espacio. Para esta curva C, la función vectorial definida por f t( )
=(
f t f t f t1( ) ( ) ( )
, 2 , 3)
es el vector posición del punto P f t f t f t(
1( ) ( ) ( )
, 2 , 3)
sobre la curva C.EJEMPLO 5.Represente la curva C en ℜ3, si ésta esta dada paramétricamente por
( )
(
( )
( )
)
3
: / cos , ,
f ℜ → ℜ f t = t sen t t
Solución. Para la representación en el espacio de esta función evaluamos algunos valores de t y el vector posición resultante es un punto perteneciente a la gráfica de la curva C dada de forma paramétrica, al representar los vectores de posición se obtiene la representación gráfica que se observa en la Figura 10.
Figura 10. Representación de la curva paramétrica C del ejemplo 5.
De manera similar una curva C en ℜ2 estará definida por la función vectorial
( )
( )
( )
2
1 ˆ 2 ˆ
: /
f ℜ → ℜ f t = f t i+ f t j, donde las funciones reales f1 y f2, son sus
funciones componentes, para un intervalo
[ ]
a b, . Entonces el conjunto de todos los puntos( )
x y, en el plano tales que x= f t1( )
e y= f t2( )
donde los valores de tpertenecen al intervalo
[ ]
a b, , se llama curva paramétrica en el plano. Para esta curva C la función vectorial definida por f t( )
=(
f t f t1( ) ( )
, 2)
es el vector posición del punto P f t(
1( ) ( )
,f t2)
sobre la curva C.EJEMPLO 6. Represente la curva C en ℜ2, definida paramétricamente por
( )
(
)
2 2
: / , 2
f ℜ → ℜ f t = t t para 2− ≤ ≤t 2.
Figura 11. Trayectoria de la curva f t
( )
=(
t t, 22)
.EJEMPLO 7. Represente la curva C en ℜ2, definida paramétricamente por
( ) (
)
2
: / 2 cos ,5
g ℜ → ℜ g θ = θ senθ para 0≤ ≤θ 2π.
Solución. La curva g es la representación en forma paramétrica de una elipse centrada en el origen y cuya gráfica en el plano cartesiano es la que se muestra en la Figura 12, el dibujo de dicha curva se obtuvo al realizar la evaluación del parámetro
θ en el intervalo correspondiente.
-2 t 2
Figura 12. Trayectoria de la curva f t
( )
=(
2cos( )
θ ,5sen( )
θ)
.EJEMPLO 8. Represente la curva C en ℜ2, definida paramétricamente por
( )
(
)
2 2
: / 2 , 1
h ℜ → ℜ h t = −t t+ para 2≤ ≤t 4.
Solución. La gráfica de la curva C dada paramétricamente por la función h, se corresponde a una parábola de vértice en el punto
( )
2,1 , y se muestra su representación gráfica en la Figura 13.Figura 13. Trayectoria de la curva f t
( )
=(
2−t t2, +1)
. EJERCICOS PROPUESTOS 1.2.Realice la representación gráfica de las siguientes curvas dadas en forma paramétrica. 1) f : 0, 2
[ ]
→ ℜ2/ f t( )
=( )
t t, 22) g: 1,3
[
−]
→ ℜ2/g t( )
= +(
t 1,t2−2)
3) : 0,5 2/
( )
(
cos( )
,3( )
)
6h π → ℜ g θ = θ sen θ
Definición. Si C es una curva definida paramétricamente por la función vectorial definida por : n/
( )
(
1( ) ( )
, 2 , ,( )
)
n
f ℜ → ℜ f t = f t f t f t con t∈
[ ]
a b, , entonces la orientación de esta curva se define según, si su trayectoria o desplazamiento se realiza desde f a( )
hasta f b( )
(orientación positiva) o desde f b( )
hasta f a( )
(orientación negativa).
Para la curva C del Ejemplo 6, se observa las dos orientaciones para una curva C en la Figura 14.
(a) Orientación Positiva (b) Orientación Negativa Figura 14. Orientación de una curva paramétrica C, f : 2, 2
[
−]
→ ℜ2/ f t( )
=(
t t, 22)
1.2.2. Parametrización de algunas de las curvas más utilizadas.
Tabla 1. Parametrización de una curva dada de forma explicita o implicita.
Curva C Parametrización de la curva C
( )
y= f x
( )
x t y f x
= =
( )
x g y= x g t
( )
y t
=
Circunferencia: x2+y2 =a2
( )
( )
cos ,0 2 s x r y r enθ θ π θ = ≤ ≤ =
Donde θ, es el ángulo que forma el radio vector con el semieje positivo de las x.
Elipse:
2 2
2 2 1
x y
a +b =
( )
( )
cos ,0 2 s x a y b enθ θ π θ = ≤ ≤ =
Donde θ, es el ángulo que forma el radio vector con el semieje positivo de las x.
Segmento de línea recta: Desde
(
x y z0, ,0 0)
hasta(
x y z1, ,1 1)
(
)
(
)
(
)
0 1 0
0 1 0
0 1 0
,0 1
x x x x t
y y y y t t
z z z z t
= + − = + − ≤ ≤ = + − Fuente: Propia.
EJEMPLO 9. Realice la parametrización de la curva C definida por la intersección de las superficies definidas por el cilindro x2+y2 =4 y el plano z+2x+2y=5.
Solución. Una parametrización para la curva implícita dada es
( )
( )
( )
( )
2cos 2cos
4 2cos 2
x t
y t
z t Sin t
= = = − −
Es decir, la función vectorial que define a esta curva definida en forma paramétrica vendría dada por f :ℜ → ℜ3/ f t
( )
=(
2 cos( )
t , 2sin( )
t , 4 2 cos−( )
t −2sin( )
t)
conFigura 15. Representación en el espacio de la curva C.
EJEMPLO 10. Parametrizar la curva C definida por la recta que va desde el punto
(
1,1,1 al punto)
(
2,3, 4 .)
Solución. Una parametrización para la curva está dada por
( ) (
1 ,1 2 ,1 3 ,)
[ ]
0,1f t = +t + t + t t∈ , y su representación en el espacio tridimensional se observa en la Figura 16.
Figura 16. Representación en el espacio de la curva C del ejemplo 10.
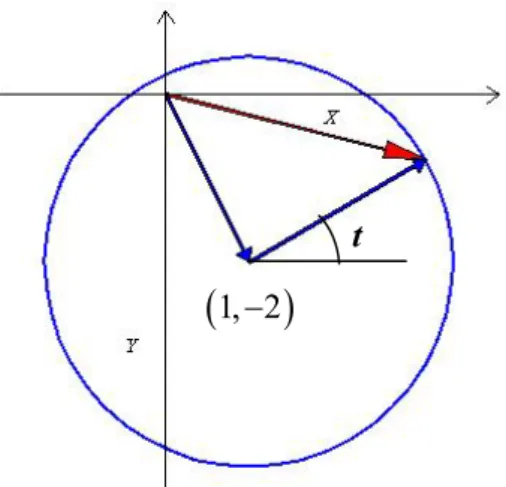
EJEMPLO 11. Parametrizar la curva C definida por la circunferencia definida en el plano por
(
x−1) (
2+ y+2)
2 =6Solución. Obsérvese que el centro de esta circunferencia está en el punto
(
x y0, 0) (
= 1, 2−)
, si ahora tomamos la siguiente parametrización2 2 5
z+ x+ y= 2 2 4
[
]
2( )
(
)
(
)
1: 0, 2 / 1 6 cos , 6 1, 1
h π → ℜ h t = t sent = x y , referida al punto
(
x y0, 0)
, además como( ) (
x y, = x0+x y1, 0+y1)
, una parametrización para la curva dada es[
]
2( )
(
)
: 0, 2 / 1 6 cos , 2 6
h π → ℜ h t = + t − + sent . donde al graficar los vectores de posición de dicha curva se obtiene la representación gráfica que se observa en la Figura 17.
Figura 17. Representación en el plano de la curva C del Ejemplo 11.
EJERCICIOS PROPUESTOS 1.2.2.
Realice la parametrización de las siguientes curvas. 1) y x= 2−1
2) x2+y2 =2y 3) 3x2+2y2=6
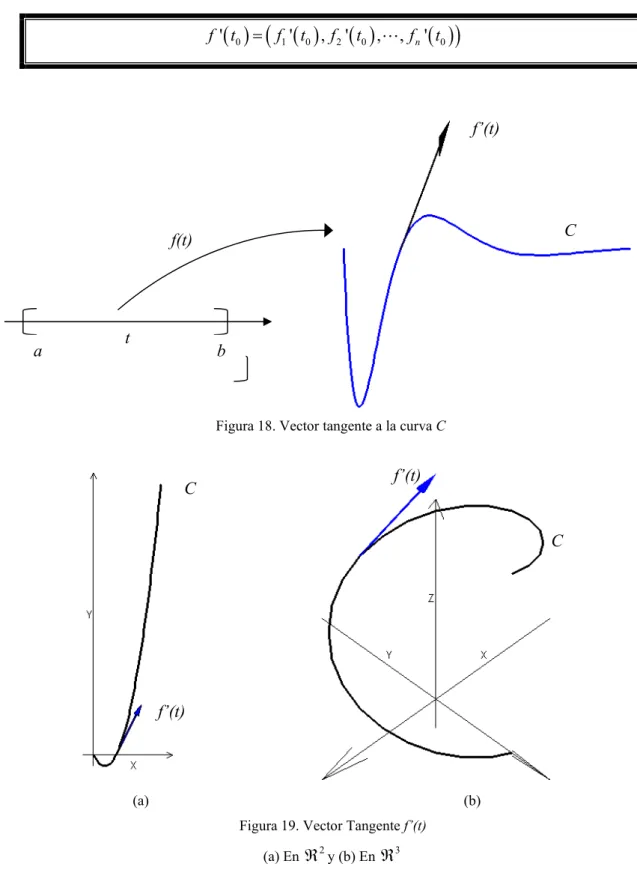
1.2.3. Vector tangente.
Definición. Sea la curva C definida en forma paramétrica por la función vectorial
( )
(
1( ) ( )
2( )
)
: n/ , , ,
n
f ℜ → ℜ f t = f t f t f t , se define al vector tangente a la curva
C en el punto
(
)
(
( ) ( )
( )
)
0 0 0
1 , 2 , , n 1 0 , 2 0 , , n 0
x x x = f t f t f t de la siguiente manera t
( )
0(
1( )
0 2( )
0( )
0)
' ' , ' , , n'
f t = f t f t f t
Figura 18. Vector tangente a la curva C
(a) (b)
Figura 19. Vector Tangente f’(t)
(a) En ℜ2y (b) En ℜ3
f’(t) f(t)
f’(t)
C
f’(t)
C C
EJEMPLO 12. Sea la curva C definida en forma paramétrica por la función vectorial
( )
( )
2 3
: / , , 2 2
f ℜ → ℜ f t = t t − ≤ ≤t , calcule sus vectores tangentes en los puntos
(
x y0, 0) ( )
= 1,1 y(
x y0, 0) (
= − −1, 1)
Solución. El vector tangente a la curva C en un punto genérico t0 es f t'
( )
0 =(
1,3t02)
, de manera que f ' 1( ) ( )
− = 1,3 y f ' 1( ) ( )
= 1,3 y en la Figura 20 se observa su representación en el plano cartesiano.Figura 20. Representación de los vectores tangentes a la curva C del ejemplo 12 en
0 1
t = − y t0 =1
EJEMPLO 13. Sea la curva C definida paramétricamente por la función vectorial
[
]
2( ) (
)
: 0, 2 / cos ,3
h π → ℜ h t = t sent , calcule sus vectores tangentes en los puntos
(
0 0)
2 3 2
, ,
2 2
x y =
y
(
1 1)
1 3 3
, ,
2 2
x y = −
Solución. El vector tangente a esta curva C para punto genérico t0 es
( )
0(
( )
0( )
0)
' ,3cos
h t = −sen t t , de manera que ' 2,3 2
4 2 2
h = − π
y
2 3 3
' ,
3 2 2
h π = − −
y en la Figura 21 se observa su representación en el plano cartesiano.
Figura 21. Representación de los vectores tangentes a la curva C del ejemplo 13 en
0
4
t =π y 1
2 3
t = π
EJEMPLO 14. Sea la curva C definida de forma paramétrica por la función vectorial
( )
(
)
2 2
: / , 1 , 2 2
f ℜ → ℜ f t = t t − − ≤ ≤t , calcule sus vectores tangentes en los puntos
(
x y0, 0) (
= 0, 1−)
y(
x y0, 0) ( )
= 1, 0Solución. El vector tangente para la curva C en punto genérico t0 está dado por
( ) (
0 0)
' 1, 2
f t = t , de manera que los vectores tangentes en los puntos señalados son
( ) ( )
' 0 1,0
f = y f ' 1
( ) ( )
= 1, 2 , y su representación en el plano cartesiano se muestran la Figura 22.Figura 22. Representación de los vectores tangentes a la curva C del ejemplo 14 en
0 0
t = y t1=1
El vector tangente unitario T t
( )
a la curva C definida paramétricamente por la función vectorial f t( )
, se define como( )
'( )
( )
'
f t T t
f t
=
e indica la dirección de la curva. El vector normal unitario (principal) N t
( )
a la curva C definida paramétricamente por la función vectorial f t( )
, se define como( )
'( )
( )
'
T t N t
T t
=
e indica la dirección del radio de curvatura.
1.2.4. Curva suave y parcialmente suave.
Definición. Sea la curva C definida paramétricamente por la función vectorial
( )
(
1( ) ( )
2( )
)
: n/ , , ,
n
f ℜ → ℜ f t = f t f t f t , con t∈
[ ]
a b, se dice que esta curva es suave si f t'( )
es continua y f t'( )
≠0, esto es, si f t1'( )
, f2'( )
t , , fn'( )
t tienen primeras derivadas continuas en el intervalo[ ]
a b, y no son simultáneamente iguales a cero.Definición. Una curva C formada por un número finito de trozos o curvas suaves, unidas de manera continua, se llama curva suave a secciones o curva parcialmente suave, esto es
1 2 n
C C= ∪C ∪ ∪C
siendo ,Ci i=1, 2, ,… n curvas suaves.
EJEMPLO 15. Represente la gráfica de la curva C definida por C C= 1∪C2∪C3
donde
( )
1: 3 ,0 2
t
C f t t
t
= ≤ ≤
, 2:
( )
3 , 2 4t
C g t = ≤ ≤t
y 3:
( )
3 2 , 4 6 2t
C h t t
t
= ≤ ≤
+
Figura 23. Gráfica de las curvas C1, C2 y C3
1.2.5. Curva simple y curva cerrada simple.
Definición. Sea C una curva definida paramétricamente por la función
( )
(
1( ) ( )
2( )
)
: n/ , , ,
n
f ℜ → ℜ f t = f t f t f t , con t∈
[ ]
a b, , se dice que C es una curva simple si la función f t( )
, de clase C1 a trozos, es inyectiva en el intervalo[ ]
a b, . Así pues, una curva simple es aquella que no se corta así misma, siendo f a( )
y f b
( )
los extremos de la curva.
Figura 24. (a) Curva simple y (b) Curva no simple
a t b a t b
f(t)
f(t) C C
C1
C2
Definición. Sea C una curva definida paramétricamente por la función vectorial
( )
(
1( ) ( )
2( )
)
: n/ , , ,
n
f ℜ → ℜ f t = f t f t f t , con t∈
[ ]
a b, , se dice que la curva C es una curva cerrada simple si la función f t( )
, de clase C1a trozos, es inyectiva en el intervalo[
a b,)
, y tal que f a( )
= f b( )
. Cuando f a( )
= f b( )
, pero f t( )
no es necesariamente inyectiva en[
a b,)
, se dice entonces que C es una curva cerrada.Figura 25. (a) Curva cerrada simple y (b) Curva cerrada
a t b a t b
f(t) f(t)
C