Evaluación de la precisión de resultados obtenidos con el procesamiento de información generada con RPAS
66
0
0
Texto completo
(2) EVALUACIÓN DE LA PRECISIÓN DE RESULTADOS OBTENIDOS CON EL PROCESAMIENTO DE INFORMACIÓN GENERADA CON RPAS- (REMOTELY PILOTED AIRCRAFT SYSTEM). ANDRES FELIPE CASTRO TOVAR JEISON EDUARDO URREGO FUQUENE. ANTEPROYECTO PRESENTADO COMO REQUISITO PARCIAL PARA OBTAR TITULO DE: INGENIERO TOPOGRÁFICO. DIRECTOR: WILLIAM BARRAGAN ZAQUE MAGISTER EN FOTOGRAMETRÍA Y GEOINFORMÁTICA. UNIVERSIDAD DISTRITAL FRANCISCO JOSÉ DE CALDAS FACULTAD DE MEDIO AMBIENTE Y RECURSOS NATURALES INGENIERÍA TOPOGRÁFICA BOGOTÁ, COLOMBIA 2018 ii.
(3) 1. Tabla De Contenido. 1. Tabla De Contenido ............................................................................................................ iii. 2. Introducción ......................................................................................................................... 1. 3. Planteamiento del problema ................................................................................................. 2. 4. Justificación ......................................................................................................................... 4. 5. Objetivos .............................................................................................................................. 6. 6. 7. 5.1. Objetivo General........................................................................................................... 6. 5.2. Objetivos Específicos ................................................................................................... 6. Marco Teórico ...................................................................................................................... 7 6.1. Fotogrametría................................................................................................................ 7. 6.2. R.P.A.S. o Drones ....................................................................................................... 10. 6.3. Composición del Drone Multirotor ............................................................................ 11. 6.4. Los drones en la Topografía ....................................................................................... 15. 6.5. Aplicaciones cartográficas para drones ...................................................................... 16. Metodología ....................................................................................................................... 19 7.1. Preparación de la prueba de campo. ........................................................................... 19. 7.2. Realización de la prueba en campo ............................................................................ 22. 7.2.1. Evaluación de la viabilidad de la prueba ............................................................. 22. 7.2.2. Realización del levantamiento topográfico ......................................................... 22 iii.
(4) 7.2.3. Replanteo de puntos de control y comparación .................................................. 22. 7.2.4. Preparación del vuelo fotogramétrico ................................................................. 24. 7.2.5. Realización del vuelo fotogramétrico ................................................................. 25. 7.3. 7.3.1. Obtención de coordenadas .................................................................................. 27. 7.3.2. Cantidad de puntos de control ............................................................................. 27. 7.4. 8. Procesamiento digital de la información .................................................................... 27. Análisis estadístico de la información ........................................................................ 33. 7.4.1. Identificación de datos atípicos. .......................................................................... 34. 7.4.2. Análisis de la varianza ANOVA ......................................................................... 36. 7.4.3. Test de Tukey ...................................................................................................... 39. 7.5. Selección de la mejor prueba ...................................................................................... 41. 7.6. Diagramas de Flujo ..................................................................................................... 42. 7.6.1. Preparación de la prueba de campo ..................................................................... 42. 7.6.2. Ejecución de la prueba de campo ........................................................................ 43. 7.6.3. Procesamiento digital de la información ............................................................. 44. 7.6.4. Análisis estadístico de la información ................................................................. 45. Resultados .......................................................................................................................... 46 8.1. Terreno Escarpado ...................................................................................................... 46. 8.1.1 8.2. Selección del mejor resultado ............................................................................. 46. Terreno montañoso ..................................................................................................... 48 iv.
(5) 8.2.1 8.3. Terreno Plano ............................................................................................................. 50. 8.3.1 8.4. 10. Selección del mejor resultado ............................................................................. 50. Terreno Urbano........................................................................................................... 52. 8.4.1 9. Selección de mejor resultado............................................................................... 48. Selección del mejor resultado ............................................................................. 52. Conclusiones ...................................................................................................................... 54 Bibliografía..................................................................................................................... 58. Lista de Ilustraciones. Ilustración 1 Diferentes esqueletos o frames de drones multirotor. ......................................... 11 Ilustración 2 Motores, hélices y ESCs, presentes en drones multirotor.. ................................. 12 Ilustración 3 Controlador de vuelo de Drone multirotor.. ........................................................ 12 Ilustración 4 Controlador para phantom 2. .............................................................................. 13 Ilustración 5 Baterías de Polímero de Litio Utilizadas en drones multirotor. .......................... 13 Ilustración 6 Cámaras y estabilizador usadas por drones multirotor. ...................................... 14 Ilustración 7 Target para pruebas de campo. ........................................................................... 20 Ilustración 8 Localización de puntos........................................................................................ 21 Ilustración 9 Levantamiento topográfico en terreno escarpado. .............................................. 23 Ilustración 10 Levantamiento topográfico en terreno montañoso. ........................................... 23 v.
(6) Ilustración 11 Alturas de vuelo en terreno escarpado .............................................................. 24 Ilustración 12 Alturas de vuelo en terreno urbano ................................................................... 25 Ilustración 13 Alturas de vuelo en terreno plano ..................................................................... 25 Ilustración 14 Alturas de vuelo en terreno montañoso ............................................................. 33 Ilustración 15 Prueba ANOVA, con un nivel de significancia del 5% .................................... 37. Lista de Tablas Tabla 1 Tabla de variables de vuelo ........................................................................................ 30 Tabla 2 Variables de estudio .................................................................................................... 30 Tabla 3 Resumen prueba ANOVA ......................................................................................... 37 Tabla 4 Análisis de varianza ................................................................................................... 38 Tabla 5 Selección del resultado más preciso - Terreno escarpado .......................................... 47 Tabla 6 Selección del resultado más preciso - Terreno montañoso ....................................... 49 Tabla 7 Selección del resultado más preciso - Terreno plano ................................................ 51 Tabla 7 Selección del resultado más preciso - Terreno urbano.............................................. 53. vi.
(7) 1. 2. Introducción. La cartografía es una ciencia, técnica y arte que busca representar de manera detallada los elementos físicos que rodean a la humanidad, buscando hacer estos entendibles y sencillos para su comprensión; el crecimiento del conocimiento ha generado un gran avance en esta ciencia que, junto con los novedosos adelantos científicos, ha creado un sin fin de variables y posibilidades para las ciencias geográficas realizando una transición a los medios digitales, donde han encontrado metodologías y técnicas dadas por la vanguardia de nuevas invenciones. Avances importantes en los campos de la electrónica, aviación, sistemas de transferencia de datos y de captura de imágenes digitales permiten así la obtención de datos aparentemente de utilidad como insumos cartográficos. En la búsqueda de la más fiable representación del entorno se requiere aplicar metodologías que permitan evaluar la calidad de productos cartográficos finalizados teniendo como eje comparativo los métodos topográficos tradicionales concluyendo finalmente de qué manera estos nuevos productos pueden ser integrados al mercado de una manera económica y competitiva de acuerdo a las necesidades que se presentan en la modernidad. En la siguiente investigación, se busca determinar la manera adecuada para realizar vuelos fotogramétricos empleando un drone multirotor, el cual posee una cámara y un sistema de toma de fotografías, lo cual permite la producción de un orto mosaico; para ello, se realizaron 16 vuelos en cuatro terrenos con condiciones topográficas distintas, alternando la altura y el traslapo. El proceso en oficina consiste en variar la cantidad de puntos de control para establecer las diferencias en los resultados extraídos con base a puntos materializados en campo, cuyos valores X, Y y Z fueron obtenidos mediante levantamiento topográfico..
(8) 2. 3. Planteamiento del problema. En los últimos años la investigación digital aplicada en vehículos aeronáuticos ha abordado multitud de posibilidades, desde vehículos espaciales especializados en viajes turísticos hasta vehículos aéreos tripulados remotamente con fines militares o de vigilancia; estos últimos han recibido gran aceptación por parte de los desarrolladores civiles, quienes vieron en esta tecnología una posibilidad de ampliar los alcances de estos vehículos equipados con variedad de herramientas tales como cámaras fotográficas, motores de gran potencia para el izamiento de cargas o sensores remotos para la transmisión de datos vía remota. Desde los años 60 militares americanos desarrollaron una aeronave capaz de realizar vuelos circulares de un área determinada capturando imágenes fotográficas, si se trae a contexto lo anteriormente mencionado se puede realizar un paralelo con las posibilidades brindadas en la actualidad, gracias a la existencia de insumos electrónicos (tarjetas electrónicas, antenas de transmisión de datos, computadoras de alta potencia y bandas de transmisión de información digital), en donde se puede apreciar el alcance logrado por esta tecnología.. Gran parte del potencial vislumbrado en esta tecnología se ha venido dando gracias a la posibilidad de visualizar de manera clara y más extensa el territorio o el espacio circundante, tarea que siempre había sido desarrollada por la cartografía; este método ha aprovechado en gran medida la tecnología aérea para la implementación de aplicaciones especializadas y desarrolladas en aeronaves tripuladas como lo es la fotogrametría. En la actualidad y derivado del interés militar de la vigilancia se realizan vuelos remotamente tripulados con el fin de capturar imágenes fotográficas aéreas de zonas de interés; es necesario implementar técnicas y metodologías que aseguren la.
(9) 3. calidad de los insumos generados, con el fin de obtener datos de utilidad para otras áreas del conocimiento como la topografía y demás intereses concernientes al desarrollo de obras civiles; es la labor del ingeniero topográfico evaluar y determinar si los productos topográficos generados con las nuevas tecnologías consisten un elemento comparable con los métodos tradicionales. Existe además la condición donde las tecnologías actuales RPAS continuaran avanzando conforme los campos de la electrónica, lo permita por este motivo es imperativo que se adelanten metodologías para estar a la par con los controles metrológicos que determinen los alcances de los nuevos sistemas fotogramétricos remotamente tripulados.. La aplicabilidad de estos nuevos insumos se hace posible de manera en que son procesados según una metodología fundamentada en la estadística y una metodología que reproduce las condiciones normales de toma de datos variando en medida controlada las variables de interés..
(10) 4. 4. Justificación. El desarrollo de esta tecnología está determinado por la aplicación que se le dé, por esto es importante llevar a cabo el planteamiento de técnicas que permitan su correcto desempeño, así generar más aplicaciones y funciones asegurando de una manera estadística un grado de precisión en los productos finalizados.. Existe diferentes inconvenientes que muchas veces imposibilitan el desarrollo de las actividades necesarias para la generación de la cartografía, tales como costos, tiempo y el acceso a los sitios a mapear, esta última se ha convertido en un gran impedimento aumentando drásticamente los costos de ejecución de las labores por tanto se requieren métodos para la obtención de datos que, con los actuales métodos de topografía es imposible o altamente difícil de conseguir. Lo anterior exige a los profesionales en topografía el desarrollo de métodos que aseguren una disminución directa de tiempo y dinero además de sentar un precedente en los controles metrológicos aplicados a la tecnología de drones. Aplicar esta clase de metodologías, obteniendo resultados objetivos constituye un legado y un punto de partida para el desarrollo de más investigaciones concernientes dentro de la Universidad Distrital Francisco José de Caldas, ampliando de esta manera los campos investigativos de los profesionales de la ingeniería topográfica.. El desarrollo de la investigación además supone los primeros adelantos en cuanto a estudios de precisión de los resultados obtenidos con drones comerciales, además que el instrumento evaluado.
(11) 5. en la investigación representa el promedio técnico en cuanto a equipos remotamente tripulados, utilizados con fines cartográficos por civiles.. Los drones permiten obtener información geográfica a partir de fotografías, esta tecnología utiliza métodos fotogramétricos para lograr un resultado óptimo, minimizando el tiempo y así mismos el costo del proceso en general lo cual representa un avance significativo para quienes se desempeñen en la creación de cartografía para usos civiles.. Se requiere entonces una metodología que establezca parámetros para la aplicación de los drones en el campo de la cartografía equiparable con los métodos topográficos permitiendo reducir tiempos y costos para obtener un producto competitivo en el mercado, la creación de esta metodología permitirá a profesionales en el campo de la cartografía, obtener un resultado óptimo en el desarrollo de sus actividades empleando el drone como herramienta de trabajo..
(12) 6. 5. 5.1. Objetivos. Objetivo General. Realizar la evaluación de la precisión de resultados obtenidos con el procesamiento de información generada con R.P.A.S. - (Remotely Piloted Aircraft System). 5.2. •. Objetivos Específicos. Determinar la cantidad de puntos de control terrestre suficientes para lograr una precisión equiparable con la topografía convencional.. •. Establecer los porcentajes óptimos de traslapo de las fotografías obtenidas con R.P.A.S; para generar resultados más precisos.. •. Evaluar las alturas de vuelo óptimas para la toma de fotografías obtenidas con R.P.A.S. según criterios de precisión.. •. Comparar el resultado obtenido en diferentes lugares, variando las condiciones topográficas del terreno..
(13) 7. 6. 6.1. Marco Teórico. Fotogrametría. La fotogrametría es una disciplina que a partir de imágenes en 2D permite la creación de modelos en 3D, como dice Jáuregui (Jáuregui Olazábal, 2001) esta disciplina permite conocer las características geométricas de los objetos representados mediante el uso de relaciones matemáticas de perspectiva geométrica. Dado que las imágenes son obtenidas por medios fotográficos y a distancia no se requiere que exista contacto físico con el objeto de interés.. Conforme con lo anterior se podría afirmar entonces que el insumo fundamental para la aplicación de la técnica fotogrametría corresponde a las fotografías cuya invención aunque tardía se considera de consecuencias incalculables (Lopez, 1993); por esto mismo se considera que la producción mecánica de imágenes como un deseo antiguo buscado principalmente por los pintores quienes de esta manera descubrieron y formularon lo que se consideran como las leyes de la perspectiva y las proyecciones geométricas; sin embargo aun con esto siendo formulado se llegó a considerar como un mayor obstáculo la conservación permanente de las imágenes. Con el paso del tiempo la invención de la fotografía ha llegado a ser equiparable con el de la imprenta y no de manera exagerada si se considera el considerable valor que se le atribuye a la imagen en nuestra época.. Los primeros usos de la fotografía fueron artísticos, inicialmente con el retrato fotográfico, posteriormente ocurrió con la fotografía de paisajes y en dado momento se comenzó a aplicar dicho.
(14) 8. procedimiento para el levantamiento de fachadas arquitectónicas y levantamiento de plantas de edificios (Jáuregui Olazábal, 2001). Solo cuando fue posible la toma de fotografías desde el aire se encontró la posibilidad de explorar aplicaciones más valiosas; esta capacidad de cartografiado se convierte en una fuente primigenia para la elaboración de cartografías temáticas no sin olvidar las diferencias que esta mantiene con los mapas y que hacen imposible que la producción convencional de mapas se vea sustituida. En consecuencia, de la utilización de la fotografía aérea se desprende la disciplina de la fotogrametría y consecuentemente la de la fotointerpretación.. La fotografía aérea vertical representa un interés especial porque es la más empleada (introducción a la fotogrametría) en la fotogrametría y fotointerpretación dadas las características del producto final generado; las fotografías han sido tomadas inicialmente desde globos y en la actualidad la técnica experimenta un auge dado el adelantado avance que presentan los vehículos aéreos; a diferencia de las fotografías que eran empleadas de manera individual para fines arquitectónicos las fotografías aéreas forman series, realizadas con el objetivo de cubrir totalmente la zona de interés, con los traslapes necesarios se espera cumplir con los principios de estereoscopia paso fundamental para la realización del proceso cartográfico.. El método fundamental de la fotogrametría fue formulado durante los años sesenta por Bonneval (Sanchez Sobrino, 2007) para el contexto especifico de la fotogrametría análoga aérea estereoscópica con el fin de formar un haz o vector en perspectiva entre la cámara y el objeto cartografiado teniendo en cuenta que en el camino de este se encuentran otros elementos como el lente de la cámara. Los respectivos haces que se forman entre el mismo punto de origen y los.
(15) 9. diferentes elementos cartografiados permiten la intersección de rayos homólogos capturados desde un punto focal distinto a cada uno de los puntos homólogos anteriormente fotografiados.. Para la ejecución del método fundamental es importante seguir o conocer cuatro pasos fundamentales para la obtención de información cartográfica (Gómez Lahoz , 2004); en primer lugar, se deben conocer las características del haz inicial o podría decirse de la información obtenida en la primera fotografía o de una determinada fotografía únicamente, a esto se le considerara la orientación interna donde se conoce la altura de vuelo, la distancia focal y otros parámetros. El segundo paso corresponde a la posición relativa entre dos haces, esto podría decirse de manera más sencilla como la ubicación entre el punto desde el cual es tomado una fotografía en relación con el correspondiente a una segunda toma; en este paso se conoce el desplazamiento o diferencias presentados por los haces homólogos que corresponden a un punto ubicado en cada una de las dos fotografías; esta orientación se considera la relativa. La orientación absoluta representa el tercer paso que se realiza generando un sistema de coordenadas unificadas y conjunto para la información de terreno, esto asegurando una orientación absoluta. Finalmente, la identificación de pares de rayos homólogos y de puntos de objeto sobre el terreno lo cual se conoce como restitución.. En la actualidad la toma de fotografías aéreas es una práctica habitual y ha desaparecido cualquier procedimiento improvisado preparando y alistando equipos, técnicas y personal adecuadamente capacitado para tal fin. Lo más notable de los equipos empleados en la actualidad y especialmente de las cámaras es su gran tamaño y peso correspondiendo a las características que ofrecen en las fotografías tomadas; sin embargo, son las características internas las que ofrecen.
(16) 10. mayor cantidad de elementos de importancia dado que estos están relacionados con las condiciones que las fotos deben cumplir para su empleo.. 6.2. R.P.A.S. o Drones. Un R.P.A.S.1 se define por sus siglas en inglés “Remotely Piloted Aircraft System”, se trata de un vehículo volador no tripulado, también llamado drone. Sus tipos, modelos y usos son muy variados para: •. Publicidad, cine documental, eventos.. •. Seguridad, vigilancia de fronteras, monitoreo.. •. Mantenimiento de redes eléctricas, topografía y geodesia.. •. Agronomía, minería, catastros, control de obras, gis.. Un drone debe ser pilotados automáticamente, pero en la práctica se comportan en forma dual, es decir, pueden ser intervenidos y controlados por un operador desde tierra. Existen dos tipos de drones, están los de ala fija, similares a los aviones de aeromodelismo y los de ala rotativa, que pueden ser de una hélice, cuatro, seis u ocho.. Los drones de ala rotatoria son menos aerodinámicos, alcanzando velocidades inferiores, por lo que quedan restringidos a cubrir superficies reducidas. La autonomía de vuelo es inferior a los anteriores, pero tienen la ventaja de que su maniobrabilidad es mucho mayor en espacios pequeños,. 1. Para referirse al sistema íntegro, el UA pasa a denominarse UAS (Unmanned Aerial System, sistema aéreo no tripulado) y el RPA se convierte en RPAS (Remotely Piloted Aircraft System, sistema aéreo tripulado por control remoto)..
(17) 11. lo que los hace especialmente útiles para la realización de trabajos verticales en zonas de complejidad técnica. (Fernandez Lozano, Gutierres Alonso, Calabares Tome, & Garcia Talegòn, 2016). (Soledad Carretero, 2015). La ventaja más evidente de un Drone multirotor frente a uno de ala fija es que puede sobrevolar cualquier lugar de forma estática y relativamente estable, a diferencia de un avión que tiene que estar siempre en movimiento (Droning, 2014).. 6.3. Composición del Drone Multirotor. La estabilidad de un drone se logra gracias a un sistema compuesto por tecnología avanzada, la cual está cada vez al alcance de todos; Marco (o frames): es el esqueleto del multirotor, lo que le da la forma y es en donde todas las partes se instalan y aseguran, existe en diferentes diseños, tamaños y materiales.. Ilustración 1 Diferentes esqueletos o frames de drones multirotor. Fuente: Droning page. 2014..
(18) 12. Motores, Hélices y ESCs: Son los componentes encargados de mantener el drone en el aire los ESC, de sus siglas en inglés (Electronic speed control) o controladores de velocidad electrónicos, regulan la potencia eléctrica para lograr controlar el giro de los motores con agilidad y eficiencia. Este giro está conectado a hélices cuya rotación a alta velocidad genera la sustentación del multirotor. (Droning, 2014). Ilustración 2 Motores, hélices y ESCs, presentes en drones multirotor. Fuente: Droning page. 2014.. Controlador de vuelo: El controlador es el cerebro de la máquina, este es el componente que controla todo lo que sucede con el multirotor y es a donde prácticamente todos los componentes van conectados.. Ilustración 3 Controlador de vuelo de Drone multirotor. Fuente: Droning page. 2014..
(19) 13. Radio receptor: Es el responsable de recibir la señal de radio enviada desde el control remoto, el cual ha interpretado el movimiento realizado por el usuario y lo ha transformado en onda radial. La señal de radio es recibida por el radio receptor del multirotor y transformada en datos que se envían al controlador de vuelo que ejecute la instrucción, normalmente con cambios coordinados en la velocidad de los motores (cuando se trate de una instrucción de movimientos). (Droning, 2014). Ilustración 4 Controlador para phantom 2. Fuente: Droning Page. 2014. Batería: Proporcionan la energía necesaria para hacer funcionar el equipo. Son componentes muy pesados por lo que es esencial que tengan una buena relación capacidad/peso para maximizar la autonomía de vuelo del multirotor. Las más utilizadas son las baterías Li-Po (Polímero de litio) debido a su densidad de energía, su bajo peso y su alta tasa de descarga que es ideal para maniobras ágiles como las de un multirotor. (Droning, 2014). Ilustración 5 Baterías de Polímero de Litio Utilizadas en drones multirotor. Fuente: Droning Page 2014..
(20) 14. Cámara y Estabilizador: en la estructura del multirotor se puede acoplar una cámara para aprovechar el vuelo y capturar fotos o video desde el aire. Dependiendo del tamaño del multirotor la cámara podrá ser desde una pesada y profesional hasta una liviana cámara de acción como una GoPro. Normalmente se utiliza un estabilizador para evitar que los movimientos propios del vuelo del multirotor afecten la toma. Estos estabilizadores absorben la vibración de los motores y corrigen automáticamente la inclinación de la cámara para que siempre este en el mismo ángulo respecto al suelo. (Droning, 2014). Ilustración 6 Cámaras y estabilizador usadas por drones multirotor. Fuente: Droning Page 2014.. Además de los componentes básicos que componen el multirotor mencionados anteriormente, existen componentes adicionales que le dan mayor estabilidad, seguridad y utilidad al equipo tales como GPS y brújula que le permiten conocer la ubicación, altitud y velocidad del multirotor, el FPV (First Person View) que consiste en un sistema de transmisión y recepción del video capturado por la cámara, en tiempo real, de esta manera el usuario puede ver lo que el multirotor está “viendo”..
(21) 15. 6.4. Los drones en la Topografía. Actualmente, gran parte de la cartografía, así como los levantamientos topográficos de una cierta magnitud, son realizados con técnicas de fotogrametría, a partir de fotografías aéreas. Si bien el concepto está implícitamente ligado a la producción de cartografía, comprende un ámbito de aplicación más amplio y se puede dividir en numerosas ramas que abarcan desde la fotointerpretación hasta la teledetección. (Sanchez Sobrino, 2007). Según Boneval, la fotogrametría se define como “la técnica cuyo objeto es estudiar y definir con precisión la forma, dimensiones y posición en el espacio de un objeto cualquiera, utilizando esencialmente medidas hechas sobre una o varias fotografías de ese objeto” (Sanchez Sobrino, 2007). La sociedad de Fotogrametría y Teledetección (ASPRS) Define la fotogrametría como “el arte, ciencia y tecnología para la obtención de medidas fiables de objetos físicos y su entorno, a través de grabación, medida e interpretación de imágenes y patrones de energía electromagnética radiante y otros fenómenos”. Esta definición es más amplia, abarcando técnicas modernas y eliminando casi las diferencias existentes entre la fotogrametría la teledetección. (Sanchez Sobrino, 2007). El vehículo aéreo no tripulado se ha desarrollado hace unas décadas y se han realizado muchos estudios con base en esta tecnología. Existe gran variedad de sistemas diferentes de UAV disponibles en el mercado..
(22) 16. Los componentes del UAV son el GPS integrado, el chipset autónomo, el sensor del viento, el sensor de navegación inercial y el controlador de velocidad electrónico. El precio del sistema UAV se basa generalmente en los gadgets de componentes instalados en la placa principal UAV. Existen dos tipos de UAV en el mercado, están los de ala fija, los cuales funcionan con el mismo principio de los aviones tripulados, incluyendo el ala principal, elevador, timón, aletas y alerones para propósitos de movimiento. El UAV multirotor tiene casi los mismos conceptos de diseño que un helicóptero, excepto que un sistema UAV rotatorio tiene más de un motor. Recientemente, la tecnología UAV se ha vuelto cada vez más popular y útil para resolver problemas en muchas aplicaciones como la cartografía de pendientes También promete la adquisición rápida de datos con menor costo, así como en menor tiempo y mano de obra. (Khairul, 2015) 6.5. Aplicaciones cartográficas para drones. La cartografía es una técnica que permite analizar y representar gráficamente parte de alguna superficie. Hoy en día se ha incrementado la demanda de disponibilidad de datos espaciales por lo que es necesario la obtención de datos a una escala de tiempo reducida, los métodos topográficos convencionales demandan mucho tiempo en comparación de la fotogrametría y esta técnica requiere una inversión de costos elevada. Los sistemas Aéreos remotamente pilotados, popularmente conocidos como drones se han convertido en una herramienta de obtención de estos datos muy útil y eficaz con resultados muy satisfactorios..
(23) 17. La fotogrametría es una herramienta básica que permite medir sobre fotografías las propiedades geométricas de los objetos situados en el terreno, empleando el área interceptada por dos fotografías (traslape) se puede obtener una visión estereoscópica de elemento.. Las nuevas herramientas tecnológicas permiten obtener datos con una resolución espacial reducida y con alta resolución espacial, el proceso de obtención de datos parte de imágenes planas en 2D a imágenes en 3D, las imágenes tomadas desde un drone son sub ortogonales dada su forma de obtención.. Las precisiones de GPS a bordo varían en varios metros por lo que es necesario un proceso de ajuste empleando puntos de control terrestre, estos deben repartirse homogéneamente sobre el territorio a mapear para obtener el mínimo error posible, además de realizar un reconocimiento del terreno para determinar las características del territorio.. Un factor determinante es la escala, por este motivo es importante realizar vuelos a no más de 152 metros sobre la superficie en cuestión para poder operar dentro del margen permitido por la ley colombiana de uso de UAV. (Vilaró, 2015) Otro parámetro a tener en cuenta son las condiciones atmosféricas, ya que estas pueden afectar la captación de los datos. Una vez obtenidos los datos se procede a su procesamiento, para ello se emplean softwares especializados en procesamiento fotogramétricos a partir de las imágenes, creando una nube de puntos. Existen programas como Photoscan o pix4D que se encargan de generar un modelo a partir de las fotografías..
(24) 18. El conjunto del registro con coordenadas x,y,z se le denomina nube de puntos, dependiendo de la resolución con que se quiera trabajar se emplean más o menos puntos, esta nube de puntos permite obtener un MDT con la cual se analiza el terreno finalmente se referencia la imagen a partir de las numerosas fotografías con información X y Y el espacio. Además de poder ofrecer información para uso científico, los drones ofrecen posibilidades emergentes en el sector educativo y de la divulgación científica, a través de la elaboración de vídeos, modelos 3D y fotografías con puntos de vista y perspectivas diferentes que pueden ayudar a la visualización de estructuras complejas, permitiendo la interacción con el público. (Fernandez Lozano & Gutierrez Alonso, 2016).
(25) 19. 7. Metodología. Con el fin de llevar a cabo la metodología, esta se debe abordar por fases, comenzando con la preparación de la prueba de campo y finalizando con la obtención de datos geográficos para su análisis.. Se utiliza el mismo modelo metodológico para la realización de las pruebas en los terrenos, montañoso, escarpado, plano y urbano; de igual manera teniendo en cuenta los traslapos de 90% y 80% además de la variación en alturas de 70m y 100m de altura.. Por lo anterior, en cada terreno se realizan cuatro vuelos variando los traslapos y las alturas.. 7.1. Preparación de la prueba de campo.. Con el fin de poder localizar los puntos de control y comparación visualmente en los ortomosaicos se utiliza poli sombra laminada de color blanca demarcada geométricamente con pintura negra para la fabricación de los puntos de comparación y control.. Para la realización de las pruebas se requiere 20 puntos de comparación, así como también 9 puntos de comparación estos miden 0.5 m de largo y 0.5 de ancho y están fabricados en poli sombra laminada blanca..
(26) 20. Como se parecía en la ilustración 7, se emplea pintura negra para crear los targets, utilizando un molde geométrico asegurando así la homogeneidad entre ellos y haciéndolos replicables. Se realiza una revisión visual de la totalidad de puntos para su replanteo y levantamiento, luego se prepara la herramienta menor requerida para el desarrollo de la prueba.. Ilustración 7 Target para pruebas de campo. Fuente: propia. Se seleccionan las locaciones de la prueba según criterio de área, la cual debe ser lo más cercano a 4 hectáreas, con visibilidad suficiente para la demarcación de los puntos y que el dron pueda capturarlos, de igual manera que las condiciones del terreno permitieran realizar el respectivo levantamiento topográfico.. Posterior a la selección exacta del sitio de la prueba se navega el sitio utilizando el software Google Earth demarcando con este el área de interés; de igual manera se realiza la distribución geométrica proyectada de los puntos sobre el área de estudio..
(27) 21. Ilustración 8 Localización de puntos. Fuente: Google Earth. Esta distribución de puntos es teórica y se verá expuesta a modificaciones durante la prueba de campo en función de localizar y levantar los puntos de manera rápida y con visibilidad suficiente.. El archivo KMZ producto de la distribución optativa se carga a los teléfonos celulares con el fin de navegar y replantear los puntos proyectados.. Se prepara el equipo topográfico que será empleado durante la prueba de campo; la estación total debidamente calibrada y cargada, trípode y bastón de aluminio en condiciones óptimas. Adicionalmente se dispondrá de equipo auxiliar como lo son radios, equipo menor, estacas y demás insumos que serán preparados antes de la ejecución..
(28) 22. 7.2. Realización de la prueba en campo. Contando con todos los insumos necesarios para la prueba de campo se procede a realizar la toma de información en los cuatro terrenos establecidos; en primer lugar, se requiere el traslado hasta cada uno de las áreas de interés para la realización de las actividades. 7.2.1 Evaluación de la viabilidad de la prueba En el sitio de la prueba se evalúa la viabilidad de la prueba según las condiciones del terreno en términos de visibilidad y área descapotada para demarcación de puntos; posteriormente se procede a definir los vértices topográficos desde los cuales se realiza el levantamiento buscando las condiciones de visibilidad según se requiera; se realiza la armada del equipo topográfico según criterio de los investigadores. 7.2.2 Realización del levantamiento topográfico La realización del levantamiento topográfico se lleva a cabo utilizando una estación total de marca NIKON modelo NPL-522 la cual se encuentra calibrada según certificación vigente, adicionalmente se realiza una verificación técnica del funcionamiento del equipo. El equipo secundario necesario como trípode y bastones con su respectivo prisma es revisado en busca de anomalías en su funcionamiento para el correcto desempeño de sus labores. Variables como la constante del prisma del levantamiento y el método para el plomo de los puntos que son levantados se determina según criterio académico. 7.2.3 Replanteo de puntos de control y comparación Con el equipo armado orientado parte de la comisión procede a navegar sobre el terreno de interés replanteando los puntos planeados anteriormente, se ubican tanto los puntos de comparación como los de control sobre el terreno siguiendo el plano establecido..
(29) 23. Ilustración 9 Levantamiento topográfico en terreno escarpado. Fuente: propia. Cada uno de los puntos se busca y se re-ubica en la medida que haga el levantamiento topográfico más rápido y el terreno permita la visualización de los puntos, para ello se emplea una estación total, tal como se muestra en la ilustración 9. Los puntos son materializados en campo con una estaca de 30 centímetros de largo y sobre ella se asegura el punto de control con puntilla en el centro manteniendo así el punto de control fabricado en poli sombra sujeto a la estaca; adicionalmente se asegura el punto en poli sombra utilizando puntillas o piquetes de madera según el terreno lo permita.. Ilustración 10 Levantamiento topográfico en terreno montañoso. Fuente: propia.
(30) 24. Se realiza la verificación de instalación, navegación y levantamiento de la totalidad de puntos de control sobre terreno de igual manera se realiza la verificación de la instalación de los puntos de comparación. Habiendo levantado los puntos se realiza una verificación de los datos consignados dentro del equipo topográfico a modo de verificación de datos.. Ilustración 11 Alturas de vuelo en terreno escarpado; Fuente: Propia. 7.2.4 Preparación del vuelo fotogramétrico Se verifica visualmente las condiciones climáticas y de luz solar para la preparación del equipo dron con el cual se realiza la prueba, si dichas condiciones cumplen con los parámetros de seguridad se procede a realizar el vuelo teniendo en cuenta que en cada tipo de terreno se requieren cuatro vuelos, variando las alturas entre 100 y 70 metros del punto medio de terreno, de igual manera se tiene en cuenta la variable que da cuenta del traslapo existente entre fotografías variando estas entre 80% y 90% de traslapo; de esta manera se generan cuatro vuelos con sus respectivas variables. Para la realización del vuelo se decide volar un área mayor a la cubierta por los puntos de control y comparación con el fin de asegurar el completo cubrimiento del terreno y la obtención de mayor cantidad de fotografías..
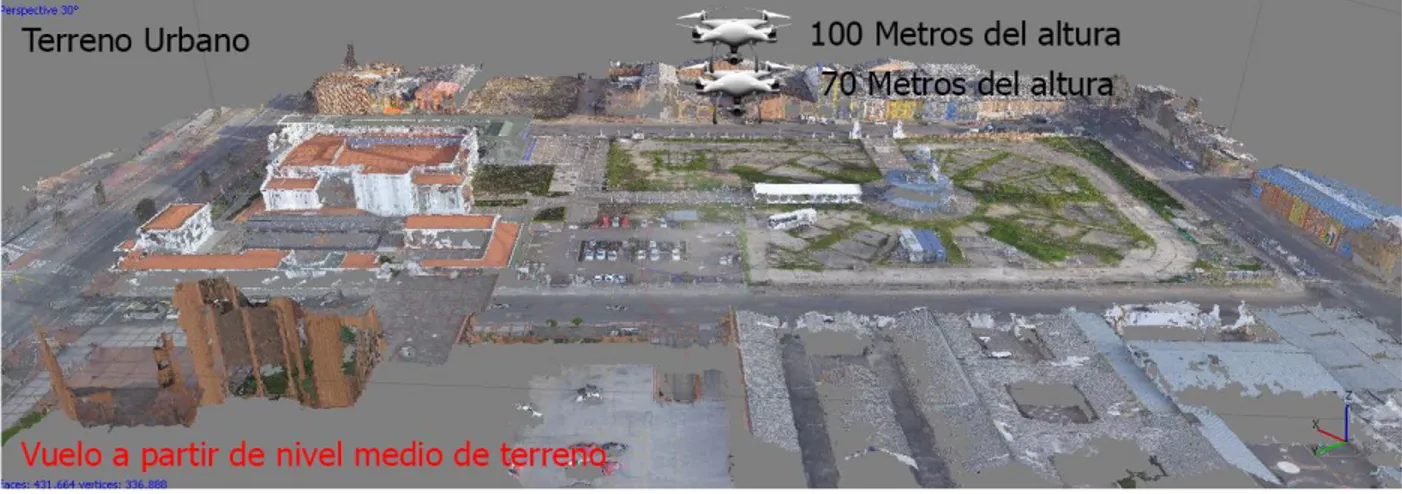
(31) 25. Ilustración 12 Alturas de vuelo en terreno urbano; Fuente: Propia. 7.2.5 Realización del vuelo fotogramétrico La ejecución de los vuelos se realiza con un equipo dron multirotor de marca DJI y modelo PHANTOM 4, que cuenta con todos sus aditamentos de vuelo y adicionalmente nunca ha sido chocado; para la calibración del equipo antes de vuelo se ejecuta la aplicación DJI GO conectada a un teléfono móvil para la calibración de brújula. Finalmente, y para la ejecución del vuelo este se programa utilizando la aplicación libre PIX4D donde se establece la altura, traslapo y área a volar; para la determinación del área de vuelo se carga el archivo KMZ de los puntos proyectados para conocer los vértices del área total de vuelo.. Ilustración 13 Alturas de vuelo en terreno plano; Fuente: Propia.
(32) 26. Luego de haberse realizado los vuelos según sus variables se procede a asegurar y descargar la información correspondiente a las fotografías tomadas, el equipo dron se revisa en busca de anomalías.. Con la obtención de las coordenadas NEZ generadas en el levantamiento topográfico y las fotografías tomadas con el equipo dron se obtienen los insumos necesarios para realizar las correcciones fotogramétricas aplicadas a cada una uno de los vuelos.. En la prueba de campo se obtienen las fotografías según las posibles combinaciones, primero, vuelo a 100 metros de altura con un traslapo en sus fotografías de 80%, segundo, vuelo a 100 metros de altura con un traslapo en sus fotografías de 90%, tercero, vuelo a 70 metros de altura con un traslapo en sus fotografías de 80% y cuarto, vuelo a 70 metros de altura con un traslapo en sus fotografías de 90%. Adicionalmente se obtienen las coordenadas NEZ de los puntos obtenidos por medio del levantamiento topográfico, nueve puntos de control para la corrección fotogramétrica de las fotografías y veinte puntos de comparación que serán evaluados con respecto a los que serán extraídos de los mosaicos obteniendo así un elemento comparativo para evaluar la calidad del producto final..
(33) 27. 7.3. Procesamiento digital de la información. 7.3.1 Obtención de coordenadas Son generadas por medio del levantamiento topográfico, se procede con la selección de estas, puesto que nueve puntos corresponden a los puntos de control y los veinte restantes a los de comparación que serán el insumo base para la evaluación de los puntos fotografiados y generados en la fotografía.. 7.3.2 Cantidad de puntos de control Son los puntos necesarios para lograr un orto mosaico que permita extraer y comparar datos con los generados en el levantamiento topográfico. Dado que el área de estudio se había contemplado sobre las cuatro hectáreas en promedio se definió el uso y demarcación de nueve puntos de control distribuidos geométricamente sobre el área de estudio; motivo por el cual se plantea el número máximo de puntos de control en nueve.. Con el fin de determinar la cantidad de puntos de control necesarios para la obtención de resultados equiparables con en el levantamiento topográfico, se realiza el proceso de orto rectificación utilizando el software Agisoft Photoscan. Se lleva a cabo el proceso de corrección utilizando los nueve puntos de control materializados, de la misma tira de fotografías el proceso se repite utilizando cinco puntos de control, siendo estos los vértices y el punto central; de nuevo procesa el vuelo utilizando solamente los cuatro puntos de los vértices y finalmente se realiza una cuarta iteración solamente con tres de los cuatro puntos de los vértices..
(34) 28. Lo anterior permite evaluar un vuelo solo vuelo con un determinado traslapo y con una altura establecida, pero variando la cantidad de puntos de control que se utilizan para la orto rectificación y así determinar cómo esto afecta el resultado extraído de los mosaicos comparándolo con el levantamiento topográfico.. En primer lugar, las tiras de fotografías deben ser revisadas con el objeto de eliminar las fotografías que pudieran estar borrosas por condiciones del vuelo o del movimiento del equipo durante el desplazamiento, esto asegura así la calidad de las fotografías que serán empleadas para la construcción del mosaico.. Posterior a la organización de las fotografías se procede al procesamiento de estas utilizando las variables correspondientes a nueve, cinco, cuatro y tres puntos de control. El procesamiento se realiza usando el software para computadores Agisoft Photoscan en el cual se carga cada vuelo.. En primer lugar, se debe realizar el importe de las imágenes que van a ser corregidas para lo cual se enlaza la carpeta con las imágenes al software, creando se así el nuevo proyecto.. Para la corrección de las fotografías se emplean 9 puntos de control los cuales fueron materializados en campo con poli sombra de manera tal que fueran visibles en las fotografías aéreas además de contar con su coordenada NEZ. Se realiza la importación de las coordenadas NEZ de los nueve puntos de control de manera manual con el fin de establecer los nueve marcadores a ser usados..
(35) 29. Como primer paso para la producción del orto mosaico se realiza la orientación de las fotografías, para lo cual el software utiliza la posición de la cámara, o sea, la ubicación GPS y altura del equipo dron en el momento de la toma de la fotografía, de esta manera para cada una de las fotografías; para cada fotografía se realiza el proceso de selección de búsqueda de pares similares donde el software determina los elementos similares entre un par de fotos y determina la geometría de este punto según parámetros de paralaje. Finalmente, en el primer paso de la construcción del orto mosaico se genera la orientación de las fotos y una nube dispersa de puntos que representan la información geográfica de los puntos sobre el terreno.. El segundo paso corresponde a la demarcación de los puntos de control sobre cada una de las fotografías, debido a que el equipo dron siguió una ruta establecida mientras toma las fotos al terreno, es necesario correlacionar en cada fotografía tomada buscando análogamente en cada una de ellas la ubicación de los determinados puntos de control y marcando sobre el centro del target la ubicación real del punto; este proceso debe realizarse en cada una de las fotos y de manera individual cerciorando la correcta demarcación de los puntos.. Para lo anterior se debe tener en cuenta que dependiendo de la cantidad de puntos de control se vayan a localizar para evaluar la más precisa disposición sobre las fotografías se localizan inicialmente la totalidad de nueve puntos hasta antes de construir la nube de puntos densa. Para la construcción de la nube densa se deben emplear inicialmente los 9 puntos y de esta manera continuar el proceso de construcción del mosaico hasta la obtención de la geotiff final de la cual se obtendrán los datos de los puntos de comparación, pero, este proceso completo debe ser repetido igualmente desde antes de la construcción de la nube de puntos densa borrando los puntos de.
(36) 30. control necesarios hasta poder realizar el proceso completo con cinco, cuatro y tres puntos; de esta manera el proceso de producción de los orto mosaicos se realizaría 4 veces variando la distribución y cantidad de los puntos de control. Como se estableció anteriormente la construcción de nube de puntos densa se debe realizar cuatro veces al igual que el resto del proceso por cada una de las iteraciones de vuelo y terreno para generar la totalidad de variaciones a estudiar; por lo cual se continua con dicho proceso.. Tabla 1 Tabla de variables de vuelo Terreno. Variables de Vuelo. Orto mosaicos. Terreno escarpado. Altura 100 m - Traslapo 80%. 9 puntos de control 5 puntos de control 4 puntos de control 3 puntos de control. Altura 100 m - Traslapo 90%. 9 puntos de control 5 puntos de control 4 puntos de control 3 puntos de control. Altura 70 m - Traslapo 80%. 9 puntos de control 5 puntos de control 4 puntos de control 3 puntos de control. Altura 70 m - Traslapo 100%. 9 puntos de control 5 puntos de control 4 puntos de control 3 puntos de control. Tabla 2 Variables de estudio.
(37) 31. El proceso de la construcción de nube de puntos densa utiliza el resultante de la orientación de fotos para interpolar información que permita hacer más densa la nube de puntos, este proceso de construcción ya tiene en cuenta los puntos de control establecidos según que iteración sea.. De la obtención de la nube de puntos densa se construye por un lado el modelo digital de elevaciones (D.E.M.) que será exportado en formato geotiff y contiene el dato de cota correspondiente para cada punto generado en la nube densa; adicionalmente se puede construir a partir de la nube de puntos densa la malla que sea empleada para la construcción del orto mosaico.. La construcción de la malla se realiza por medio del modelamiento de la superficie utilizando los puntos anteriormente generados en la nube de puntos densa.. Luego, se construye el orto mosaico, este se proyecta en formato de coordenadas planas cartesianas; para la construcción del orto mosaico también se realiza el ajuste utilizando los puntos de control para el mejoramiento del producto final. El orto mosaico debe ser exportado en formato geotiff para su tratamiento en el software de extracción de datos.. Finalmente se obtiene un orto mosaico corregido para las iteraciones realizadas con nueve, cinco, cuatro y tres puntos de control, para su análisis se emplea el software ArcMap en su versión 10.1.. El objeto de la extracción de datos está en la obtención de las coordenadas NEZ de los puntos de comparación visibles en los mosaicos y poder evaluar las diferencias entre estos datos y los.
(38) 32. obtenidos con el levantamiento; teniendo en cuenta que cada mosaico ha sido ajustado de distinta manera según la cantidad de puntos de control tenga; para esto se importa cada uno de los mosaicos sobre los cuales se identificaran los puntos de comparación.. Sobre cada uno de los puntos de comparación identificados en la fotografía se construye un polígono con la medida correspondiente a la que posee el target, así en cada uno de los puntos el polígono construido se ajusta a la forma del punto materializado; habiendo construido los 20 polígonos sobre cada orto mosaico se extrae la información de sus centroides lo que correspondería al centro del target donde fue levantado el punto por medio de topografía convencional.. La obtención de la cota se obtiene interpolando la nube de puntos correspondiente a los centroides XY y el D.E.M. por medio de la herramienta Interpolate Shape del módulo 3D analysis tools de ArcMap 10.1 y el complemento XTools Pro.. Finalmente se obtienen los listados de coordenadas y cotas extraídas de cada uno de los mosaicos los cuales serán comparados con las obtenidas en el levantamiento topográfico. En total se realiza la revisión de 80 iteraciones, para todos los tipos de terreno, montañoso, escarpado, plano y urbano..
(39) 33. Ilustración 14 Alturas de vuelo en terreno montañoso; Fuente: Propia. 7.4. Análisis estadístico de la información. Se evalúa el componente planimétrico (XY) por separado de la altura (z) en todas las pruebas, excepto las iteraciones realizadas empleando 0 puntos de control. Se realizaron 16 vuelos en total, 4 en cada uno de los terrenos variando la altura y el traslapo en cada uno de ellos; el procedimiento en oficina consiste en variar la cantidad de puntos de control (0,3,4,5 y9), obteniendo un total de 80 tablas de coordenadas, correspondientes a los puntos de comparación, los cuales son extraídos de las ortofotos. Como resultado se obtienen 5 tablas de coordenadas por cada vuelo; al ser cuatro vuelos por terreno se obtienen 20 en total y se realiza un análisis por cada vuelo. Inicialmente, se calculan las diferencias entre las coordenadas de cada una de las tablas y los valores de mayor precisión, los cuales son obtenidos por medio de levantamiento topográfico. Como resultado, se obtienen las tablas de diferencias..
(40) 34. Para poder establecer la mejor distribución de los puntos de control, se realizan tres pruebas estadísticas, las cuales permiten identificar el resultado que presenta menor diferencia con respecto a los datos de mayor precisión.. 7.4.1 Identificación de datos atípicos. Un valor atípico, es un dato considerablemente diferente a los otros datos de la muestra, estos valores pueden alertar acerca de las anormalidades experimentales o los errores en las mediciones tomadas, y debido a esto es necesario descartarlos de un conjunto de datos. Si los valores típicos se ignoran, puede haber cambios importantes en las conclusiones del estudio. El primer paso para encontrar los valores atípicos en un conjunto de datos, es encontrar la mediana del conjunto, para ello se ordenan los valores de menor a mayor, la mediana del conjunto de datos, es el dato por sobre el cual se encuentra la mitad de los datos y por debajo del cual se encuentra la otra mitad. Para identificar los valores atípicos, se calculan los cuartiles Q1, Q2 y Q3, en donde Q2 corresponde a la mediana, Q1 es el valor que está en el medio del conjunto de datos que se encuentra por debajo de la mediana, mientras que el Q3 es el valor que está en el medio del conjunto de datos que se encuentra por encima de la mediana. Con estos valores se calcula el rango intercuartílico, que equivale a la distancia entre las variables Q1 y Q3, este valor es la clave para determinar los límites de nuestros valores no atípicos del conjunto de datos. Los valores atípicos se identifican al evaluar si se encuentran o no dentro de unos límites numéricos llamados limites internos y limites externos, para calcular estos valores se emplean las siguientes ecuaciones..
(41) 35. 𝐿𝑖 = 𝑄1 − 𝑅𝐼𝐶 ∗ 1.5. (1). 𝐿𝑒 = 𝑄3 + 𝑅𝐼𝐶 ∗ 1.5. (2). Donde: Li = Limite interno Q1 = Cuartil 1 RIC = Rango intercuartílico. Donde: Le = Limite externo Q1 = Cuartil 1 RIC = Rango intercuartílico En el caso de los valores que corresponden a las diferencias en Planimetría, solo se tiene en cuenta el limite externo o superior; los valores atípicos corresponden a aquellos que se encuentran por encima de ese valor, ya que el valor más pequeño equivaldría a cero, en cuanto a la altimetría, se tienen en cuenta los valores tanto del límite interno como el externo, ya que en la tabla de diferencias se manejan datos negativos, esto se debe a que la altura de los puntos puede estar por encima o por debajo de los valores de mayor precisión..
(42) 36. 7.4.2 Análisis de la varianza ANOVA Es una prueba paramétrica que requiere una serie de valores para ser aplicada correctamente, esta prueba sirve para estudiar las dispersiones o varianzas de los grupos, además de estudiar sus medias y la posibilidad de crear subconjuntos de grupos con medias iguales. Esta prueba se requiere que cada uno de los grupos a comparar tenga distribuciones normales, o lo que es más exacto, que lo sean sus residuales. Los residuales son las diferencias entre cada valor y la media de su grupo. Además, debemos estudiar la dispersión o varianzas de los grupos, es decir estudiar su homogeneidad. Cuando mayor sean los tamaños de los grupos, menos importante es asegurar estos dos supuestos, ya que el ANOVA suele ser una técnica bastante “robusta” comportándose bien respecto a transgresiones de la normalidad. Como resultado, se plantea una hipótesis nula y una hipótesis alterna, en la hipótesis nula, se dice que las medias de los k grupos son iguales, y por tanto las diferencias encontradas pueden explicarse por el azar, en otras palabras, los grupos proceden de poblaciones con medias iguales; en la hipótesis alterna, al menos uno de los grupos tiene una media distinta al resto de los grupos. Para el análisis de los datos de este estudio, primero se realiza el análisis de cuartiles, así se determinan los valores atípicos, estos no se tienen en cuenta al momento de realizar la prueba ANOVA. Se toman los datos de las pruebas con 3,4,5 y 9 puntos de control, se descartan los resultados empleado 0 puntos de control, ya que estos son significativamente diferentes. Para la realización de la prueba ANOVA, se empleó el software Excel, el cual brinda la posibilidad de realizar este test. Desde la pestaña datos y empleando la herramienta análisis de datos, se desplegará una tabla en donde se escoge la primera opción, análisis de varianza de un factor, ahí se selecciona el rango de entrada, que serán los datos extraídos de las ortofotos.
(43) 37. generadas como resultado de las pruebas, y el grado de significancia, el cual corresponde a el 100% menos el nivel de confianza, que para esta prueba equivale al 95%.. Ilustración 15 Prueba ANOVA, con un nivel de significancia del 5% (fuente Excel 2016). Como resultado, se obtendrán dos tablas, las cuales brindan la información necesaria para determinar qué grupo o que grupos de datos son significativamente distintos a los otros.. Tabla 3 Resumen prueba ANOVA Grupos. Cuenta. Suma. Promedio. Varianza. Columna 1. 19. 1.368. 0.072. 0.003. Columna 2. 19. 0.808. 0.043. 0.000. Columna 3. 19. 0.940. 0.049. 0.001. Columna 4. 19. 0.891. 0.047. 0.001. Resumen de prueba ANOVA, empleando 4 grupos y un nivel de significancia de 5% (fuente propia).
(44) 38. Interpretación. Grupos: muestra el título de la columna en donde se encuentran los datos, la cantidad de casillas depende de la cantidad de grupos. Cuenta: son la cantidad de valores de cada grupo, para realizar la prueba ANOVA en Excel, es importante tener la misma cantidad de datos, en el caso de haber menos valores en un grupo que en otro, se remplazan los espacios vacíos por la media aritmética, de esta manera no se altera el resultado. Suma: como el nombre lo indica, es la suma de cada uno de los valores de cada grupo. Promedio: media aritmética de los valores de cada grupo. La última columna, muestra la varianza de los grupos. Al ser tan pequeña, se acotan los decimales a tres cifras.. Tabla 4 Análisis de varianza Origen de las variaciones Entre grupos Dentro de los grupos Total. Suma de. Grados de. Promedio de. cuadrados. libertad. los cuadrados. 0.010. 3. 0.003. 0.078. 72. 0.001. 0.088. 75. Valor F. P. crítico para F. 3.048. 0.034. Análisis de la varianza de un factor, empleando 4 grupos (fuente propia). 2.732.
(45) 39. Interpretación. Suma de cuadrados entre grupos: mide la dispersión de la media de cada grupo respecto de la media total. Como en esta prueba se tienen cuatro grupos, los grados de libertad son 3, se calcula como el número de grupos menos 1. Suma de cuadrados dentro de los grupos: mide la dispersión de cada observación respecto a la media de su grupo, los grados de libertad se calculan como el número de valores menos el número de grupos. Promedio de los cuadrados: llamada también varianza residual, se calcula dividiendo la suma de cuadrados entre y dentro de los grupos y los grados de libertad, respectivamente. F: es el resultado de la varianza entre y dentro de los grupos. P: El valor p es una probabilidad que mide la evidencia en contra de la hipótesis nula. Las probabilidades más bajas proporcionan una evidencia más fuerte en contra de la hipótesis nula. Valor crítico para f: Un valor crítico es un punto en la distribución del estadístico de prueba bajo la hipótesis nula que define un conjunto de valores que apoyan el rechazo de la hipótesis nula. Si el valor de F es mayor a este valor crítico, se rechaza la hipótesis nula.. 7.4.3 Test de Tukey. El método de Tukey se utiliza en ANOVA para crear intervalos de confianza para todas las diferencias en parejas entre las medias de los niveles de los factores mientras controla la tasa de error por familia en un nivel especificado. Es importante considerar la tasa de error por familia cuando se hacen comparaciones múltiples, porque la probabilidad de cometer un error de tipo I para una serie de comparaciones es mayor que la tasa de error para cualquier comparación.
(46) 40. individual. Para contrarrestar esta tasa de error más elevada, el método de Tukey ajusta el nivel de confianza de cada intervalo individual para que el nivel de confianza simultáneo resultante sea igual al valor que usted especifique. (Minitab, ¿Que es el metodo de Tukey para comparaciones multiples?, 2017) Este test se emplea cuando se establece la hipótesis alterna de la prueba ANOVA, con él, se busca identificar que grupo o que grupos son significativamente diferentes a los otros, para ello se debe calcular la diferencia honestamente significativa. 𝐻𝑆𝐷 = 𝑀 ∗ √. 𝑀𝑠𝑒 𝑛. (3). En donde: HSD: honestly significant difference, o diferencia honestamente significativa M: multiplicador, extraído de la tabla de valores críticos para la prueba de Tukey (Anexo 1.) Mse: división entre la suma de cuadrados y los grados de libertad dentro de los grupos, de la prueba ANOVA. n: es la cantidad de valores de la muestra de un solo grupo. Finalmente, se calculan las diferencias entre la media aritmética de todas las pruebas entre sí, el valor o los valores (en valor absoluto) que superen el HSD, se consideran como significativamente diferentes, estos pueden estar muy alejados o muy cercanos de los valores de mayor precisión, la prueba solo determina si existe una diferencia, pero no establece cual es el mejor resultado, para ello, se debe seleccionar la mejor prueba, en este caso, se realizó con base a la menor desviación estándar con respecto a los datos de mayor precisión..
(47) 41. 7.5. Selección de la mejor prueba. Se define el resultado más aproximado a los valores de mayor precisión, se obtienen cuatro resultados, uno por cada vuelo de cada terreno estudiado, estos datos son analizados nuevamente utilizando ANOVA, y de ser necesario se realiza el test de Tukey, con ello determinar la mejor altura de vuelo, traslapo de las fotografías, cantidad y distribución de los puntos de control..
(48) 42. 7.6. Diagramas de Flujo. 7.6.1 Preparación de la prueba de campo.
(49) 43. 7.6.2 Ejecución de la prueba de campo.
(50) 44. 7.6.3 Procesamiento digital de la información.
(51) 45. 7.6.4 Análisis estadístico de la información.
(52) 46. 8 8.1. Resultados. Terreno Escarpado. Características del terreno: -. Pendiente media: superior al 8%. -. Área entre puntos materializados: 30.000 m2. -. Ubicación: zona rural del municipio de Sibaté, Cundinamarca, con coordenadas geográficas: 4° 29’ 06.62N, 74° 14’ 41.15W. En este terreno, se realizaron 20 pruebas, variando la altura de vuelo, traslapo, cantidad y distribución de puntos de control, de esta manera, determinar el mejor resultado en el componente planimétrico (XY), y en el componente altimétrico (Z).. 8.1.1 Selección del mejor resultado Se obtuvieron los mejores cuatro resultados, uno por cada vuelo (véase anexo 2: Terreno escarpado, tabla 104, mejores resultados de cada prueba en el componente planimétrico (XY). Estos valores fueron comparados utilizando la prueba ANOVA; se estableció la hipótesis alterna, ya que por lo menos en un grupo el promedio es distinto con un 95% de confiablidad, por este motivo fue necesario realizar el test de Tukey, el cual mostro que los resultados de las pruebas difieren entre ellos, por las variables de altura y traslapo, ya que se emplearon los mismos puntos de control en tres de las cuatro pruebas. Se determinó que, al realizar un vuelo de 70 metros de altura, con un traslapo de 90% y utilizando 4 puntos de control, distribuidos en las esquinas del área cubierta por las fotografías, se obtiene una desviación estándar de 16 milímetros, en comparación con los datos de mayor precisión. Este fue el mejor resultado de las pruebas..
(53) 47. En cuanto al componente altimétrico, se realizó el procedimiento estadístico a las misma cuatro pruebas con el fin de establecer las condiciones ideales para obtener resultados confiables, se determinó que el mejor resultado en Z corresponde al vuelo con cinco puntos de control, aunque se selecciona la correspondiente al mejor resultado XY o sea, la prueba con cuatro puntos de control. La selección del mejor resultado para la prueba también se realiza teniendo en cuenta la cantidad de datos atípicos presentes para cada una de las pruebas dado que dichos datos hacen referencia a deformaciones en la fotografía. Terreno. Altura (m) Traslapo Puntos de Control. 80%. 100. 90%. Escarpado. 80%. 70. 90%. 0PC 3PC 4PC 5PC 9PC 0PC 3PC 4PC 5PC 9PC 0PC 3PC 4PC 5PC 9PC 0PC 3PC 4PC 5PC 9PC. Desviación Estándar Numero de datos atípicos XY Z XY Z 0.053 0.021 0.025 0.025. 0.203 0.107 0.116 0.076. 2 1 1 3. 0 0 0 0. 0.028 0.031 0.058 0.035. 0.125 0.074 0.203 0.063. 2 2 2 3. 0 0 0 0. 0.067 0.022 0.029 0.037. 0.061 0.059 0.047 0.040. 1 2 1 1. 1 0 0 1. 0.012 0.016 0.018 0.014. 0.050 0.062 0.040 0.044. 3 2 2 3. 1 0 1 0. Tabla 5 Selección del resultado más preciso - Terreno escarpado.
(54) 48. 8.2. Terreno montañoso. Características del terreno: -. Pendiente media: superior al 6%. -. Área entre puntos materializados: 37.000 m2. -. Ubicación: zona rural del municipio de La Calera, Cundinamarca, con coordenadas geográficas: 4°39’18.66” N, 74°00’49.68” W. En este terreno, se realizaron 20 pruebas, variando la altura de vuelo, traslapo, cantidad y distribución de puntos de control, de esta manera, determinar el mejor resultado en el componente planimétrico (XY), y en el componente altimétrico (Z).. 8.2.1 Selección de mejor resultado Se obtuvieron los mejores cuatro resultados, uno por cada vuelo (véase anexo 3: Terreno escarpado, tabla 107, mejores resultados de cada prueba en el componente planimétrico (XY). Estos valores fueron comparados utilizando la prueba ANOVA; se estableció la hipótesis nula, ya que el promedio de los grupos es igual, con un 95% de confiablidad. Se determinó que, al realizar un vuelo de 70 metros de altura, con un traslapo de 90% y utilizando 4 puntos de control, distribuidos en las esquinas del área cubierta por las fotografías, se obtiene una desviación estándar de 7 milímetros, en comparación con los datos de mayor precisión. Este fue el mejor resultado de las pruebas. En cuanto al componente altimétrico, se realizó el procedimiento estadístico a las misma cuatro pruebas con el fin de establecer las condiciones ideales para obtener resultados confiables, se determinó que el mejor resultado en Z corresponde al vuelo con nueve puntos de control, aunque.
(55) 49. se selecciona la correspondiente al mejor resultado XY o sea, la prueba con cuatro puntos de control. La selección del mejor resultado para la prueba también se realiza teniendo en cuenta la cantidad de datos atípicos presentes para cada una de las pruebas dado que dichos datos hacen referencia a deformaciones en la fotografía. Terreno. Altura (m) Traslapo Puntos de Control. 80%. 100. 90%. Montañoso. 80%. 70. 90%. 0PC 3PC 4PC 5PC 9PC 0PC 3PC 4PC 5PC 9PC 0PC 3PC 4PC 5PC 9PC 0PC 3PC 4PC 5PC 9PC. Desviación Estándar Numero de datos atípicos XY Z XY Z 0.024 0.013 0.013 0.011. 0.062 0.043 0.047 0.053. 0 1 1 1. 0 1 0 0. 0.013 0.010 0.090 0.011. 0.070 0.050 0.052 0.046. 0 0 0 0. 2 0 1 1. 0.024 0.017 0.015 0.016. 0.093 0.044 0.054 0.049. 0 0 0 0. 0 0 0 2. 0.009 0.007 0.008 0.019. 0.049 0.048 0.044 0.041. 1 1 1 0. 3 0 0 2. Tabla 6 Selección del resultado más preciso - Terreno montañoso.
(56) 50. 8.3. Terreno Plano. Características del terreno: -. Pendiente media: inferior al 3%. -. Área entre puntos materializados: 40.000 m2. -. Ubicación: Zona Industrial de Siberia – Autopista Bogotá – Medellín Km 2.5; Cundinamarca, con coordenadas geográficas: 4° 44’ 52.25N, 74° 07’ 56.90W. En este terreno, se realizaron 20 pruebas, variando la altura de vuelo, traslapo, cantidad y distribución de puntos de control, de esta manera, determinar el mejor resultado en el componente planimétrico (XY), y en el componente altimétrico (Z).. 8.3.1 Selección del mejor resultado Se obtuvieron los mejores cuatro resultados, uno por cada vuelo (véase anexo 4: Terreno plano, tabla 95, mejores resultados de cada prueba en el componente planimétrico (XY). Estos valores fueron comparados utilizando la prueba ANOVA; se estableció la hipótesis alterna, ya que por lo menos en un grupo el promedio es diferente, con un 95% de confiablidad, por tanto, se realizó el test de Tukey, con este procedimiento se encontró que las diferencias de los resultados, radican en la altura y el traslapo de las pruebas, ya que los mejores resultados de cada prueba se realizaron empleando 5 puntos de control. Se determinó que, al realizar un vuelo de 70 metros de altura, con un traslapo de 90% y utilizando 5 puntos de control, distribuidos en las esquinas y en la mitad del área cubierta por las fotografías, se obtiene una desviación estándar de 12 milímetros, en comparación con los datos de mayor precisión. Este fue el mejor resultado de las pruebas..
Figure




+7





Documento similar
No había pasado un día desde mi solemne entrada cuando, para que el recuerdo me sirviera de advertencia, alguien se encargó de decirme que sobre aquellas losas habían rodado
Habiendo organizado un movimiento revolucionario en Valencia a principios de 1929 y persistido en las reuniones conspirativo-constitucionalistas desde entonces —cierto que a aquellas
Por lo tanto, en base a su perfil de eficacia y seguridad, ofatumumab debe considerarse una alternativa de tratamiento para pacientes con EMRR o EMSP con enfermedad activa
The part I assessment is coordinated involving all MSCs and led by the RMS who prepares a draft assessment report, sends the request for information (RFI) with considerations,
La campaña ha consistido en la revisión del etiquetado e instrucciones de uso de todos los ter- mómetros digitales comunicados, así como de la documentación técnica adicional de
You may wish to take a note of your Organisation ID, which, in addition to the organisation name, can be used to search for an organisation you will need to affiliate with when you
Products Management Services (PMS) - Implementation of International Organization for Standardization (ISO) standards for the identification of medicinal products (IDMP) in
This section provides guidance with examples on encoding medicinal product packaging information, together with the relationship between Pack Size, Package Item (container)
